Область техники, к которой относится изобретение
Изобретение относится к области радиотехники и может быть использовано в наземных системах обзорной радиолокации для обнаружения и сопровождения сигналов от объектов назначения (целей).
Уровень техники
Высокая точность угловых измерений и комплексное ведение радиолокационной разведки различными средствами локации может быть обеспечена, как известно, моноимпульсным методом [1 - Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация - М.: Радио и связь, 1984. - 312 с.]. Высокое быстродействие радиолокационных систем (РЛС) достигается за счет использования обзорных режимов работы, позволяющих одновременно определить координаты всех воздушно-космических объектов (ВКО), находящихся в общей зоне парциальных диаграмм направленности (ДН).
Задача повышения точности измерения угловых координат (УК) и расширения рабочей зоны (РЗ) при однопозиционной обзорной моноимпульсной пеленгации и повышения скорости измерений УК решена в предложенном ранее способе [2 - патент 2583849, РФ, G01S 3/14, H01Q 25/02. Способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки (варианты) и обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов / Джиоев А.Л., Омельчук И.С., Фоминченко Г.Л., Фоминченко Г.Г., Яковленко В.В. Заявл. 13.04.2015, опубл. 10.05.2016]. Этот способ и пеленгатор на его основе позволяют путем выбора угла разноса парциальных ДН и вида весовой функции (ВФ) сформировать пеленгационную характеристику (ПХ) устройства, практически линейную в рабочей зоне (РЗ), равной раствору моноимпульсной группы лучей (МГЛ) по уровню половинной мощности и обеспечить моноимпульсное измерение УК с точностью не хуже 0,01 от величины этой зоны.
Недостатком данного способа является то что данный способ [2] не предназначен для определения параметров траекторий ВКО и скоростей их движения.
Известен способ измерения координат с повышенной точностью с помощью многопозиционной РЛС [3 - Патент 2515571, РФ, G01S 13/46. Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе / Машков Г.М., Борисов Е.Г. Заявлен 5.10.2012, опубликован 10.05.2014]. Он позволяет, кроме координат, определять скорость цели и скорость ее изменения. Для этого излучение зондирующих и прием отраженных сигналов осуществляют на каждой позиции системы, там же измеряют дальности до цели и скорости изменения дальности. Измеряют две суммы дальностей от одной позиции до цели и от цели до двух других позиций, а также три попарные разности дальностей и скорости их изменения, по которым вычисляют уточненные значения дальности и скорости их изменения по приведенным формулам.
Недостатком данного способа является не обеспечение определения направлений движения целей (объектов), углов пикирования (кабрирования), а также не возможность построить траектории их движения в пространстве. Также не рассмотрены способы улучшения разрешающей способности по УК, хотя улучшение разрешающей способности является важным направлением совершенствования РЛС, позволяющим осуществить селекцию элементов групповых объектов (ЭГО). Следовательно, улучшение точности определения координат и траекторий ВКО, а также их углового разрешения при локации в расширенной рабочей зоне, является актуальным.
Известен способ близкий по технической сущности к заявляемому способу [4 - патент 2279105, РФ, G01S 13/42, G01S 13/72, G01S 17/42. Комплексный способ определения координат и параметров траекторного движения авиационно-космических объектов, наблюдаемых группировкой станций слежения / Мамошин В.Р. Заявл. 2.08.2004, опубл. 27.06.2006], принятый за прототип.В нем на взаимодействующих станциях синхронно измеряют координаты объектов и, используя известные базовые расстояния между станциями, определяют первичные параметры траекторного движения наблюдаемых объектов. Значения этих параметров по межстанционным дуплексным каналам транслируют на каждую станцию группировки, где избыточное количество алгоритмов локального комплексирования используют для получения дополнительной информации о параметрах траекторного движения объектов. После этого формируют сигналы управления дальномерными и угломерными каналами станций при вынужденном прерывании их нормального функционирования. Далее значения параметров передают на пункты контроля, где их представляют в единой земной базисной системе координат и после статистической обработки получают уточненные оценки параметров траекторного движения объектов.
Недостатком данного способа, применительно к задаче определения координат, скоростей и траекторий движения в пространстве лоцируемых ВКО относятся:
- использование значений наклонных дальностей и пространственных составляющих скоростей объектов при расчете проекций координат на горизонтальной плоскости, что вносит дополнительные погрешности при построении траекторий движения объектов;
- излишние затраты времени на статистическую обработку избыточной неравноточной информации о параметрах движения ВКО.
Известен способ высокоточного определение координат и траекторий перемещающихся в пространстве ВКО в расширенной РЗ [5 - Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов RU 2713498 C1 2020], позволяющий определить значения модулей скорости движения ВКО, их пространственных курсовых углов и углов пикирования (кабрирования), а также определить структуру и порядка функционирования РЛС.При использовании предложенного способа появляется возможность обнаружения маневров ВКО, использования устойчивых алгоритмов сопровождения маневрирующих объектов и построения траекторий их движения. Также эффективно решаются вопросы целераспределения, целеуказания и селекции отдельных объектов при их перемещении в составе групп.
Недостатком данного способа являются отсутствие низкоуровневого объединения радиолокационной информации в иерархии системы разведки соединения ПВО. Активные средства и пассивные работают отдельно друг от друга. Комплексирование ведется на уровне объединения информации с отождествлением.
Последние были выбраны в качестве прототипа, однако способы, основанные на комплексном определение координат и траекторий перемещающихся в пространстве ВКО находящихся в общей зоне парциальных диаграмм направленности, обладают недостатками, которые заключаются в том, комплексное ведение радиолокационной разведки различными средствами локации осуществляется на уровне объединения информации с отождествлением. Данный недостаток указывает на постоянную работу на излучение активных РЛС и свидетельствует о необходимости комплексного применения средств активной и пассивной радиолокации для определения координат всех ВКО, находящихся в общей зоне парциальных диаграмм направленности.
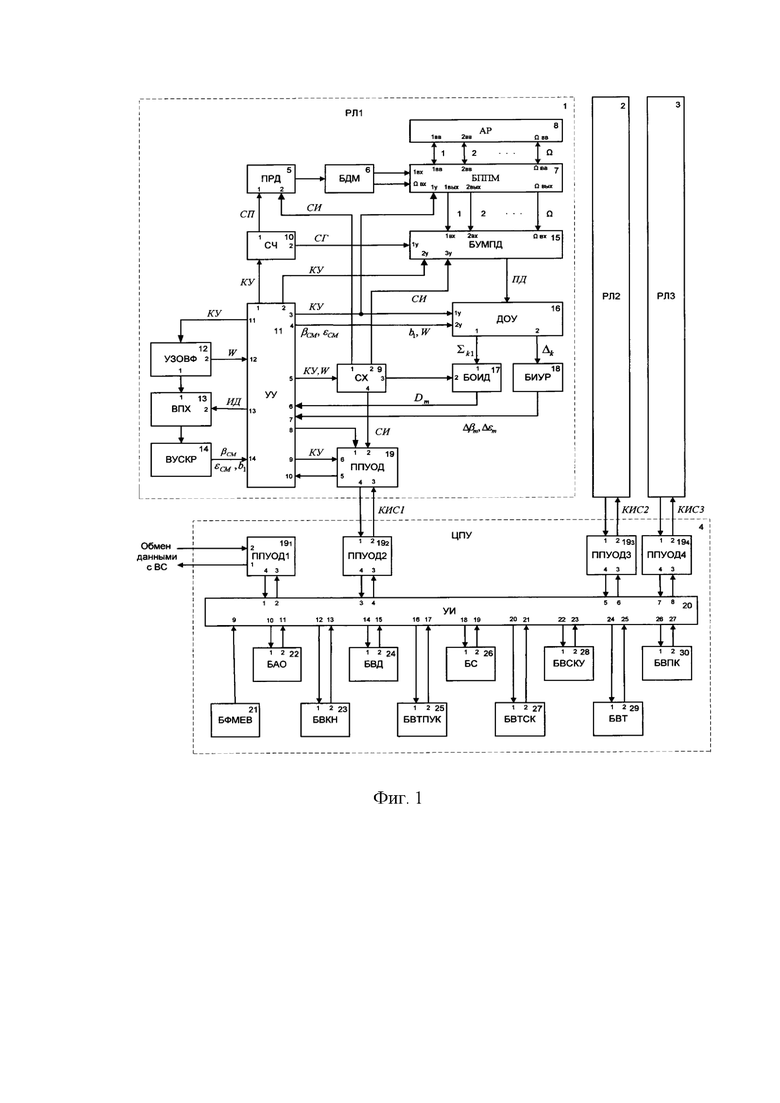
В условиях использования обзорной активно-пассивной (АП) латерационной радиолокации ВКО, при которой образуются многопозиционные радиолокационные системы из трех активных трехкоординатных угломерно-дальномерных радиолокаторов (фиг. 1), где приняты следующие обозначения: 1 - радиолокатор 1 (РЛ1); 2 - радиолокатор 2 (РЛ2); 3 - радиолокатор 3 (РЛЗ); 4 - центральный пункт управления (ЦПУ); 5 - передатчик (ПРД); 6 - блок делителей мощности (БДМ); 7 - блок приемопередающих модулей (БППМ); 8 - антенная решетка (АР); 9 - синхронизатор (СХ); 10 - синтезатор частот (СЧ); 11 - устройство управления (УУ); 12 - устройство запоминания отсчетов весовой функции (УЗОВФ); 13 - вычислитель пеленгационных характеристик (ВПХ); 14 - вычислитель углов смещения максимумов ДН в МГЛ от РСН и коэффициентов разложения функции, описывающей ПХ (ВУСКР); 15 - блок умножителей и маршрутизатор потока данных (БУМПД); 16 - диаграммообразующее устройство (ДОУ); 17 - блок обнаружителей и измерителей дальностей (БОНД); 18 - блок измерителей угловых рассогласований (БИУР); 19 - приемопередающее устройство обмена данными и ретрансляции сигналов (ППУОД); 191-194 - приемо-передающие устройства обмена данными и ретрансляции сигналов (ППУОД1-ППУОД4); 20 - устройство интерфейсное (УИ); 21 - блок формирования меток единого времени (БФМЕВ); 22 - блок анализа обстановки (БАО); 23 - блок вычислителя координат наведения (БВКН); 24 - блок вычислителя дальностей (БВД); 25 - блок вычислителя точных прямоугольных угловых координат (БВТПУК); 26 - блок селекции (БС); 27 - блок вычислителя точных сферических координат (БВТСК); 28 - блок вычислителя модулей скоростей, пространственных курсовых углов и углов пикирования (БВСКУ); 29 - блок вычислителя траекторий (БВТ); 30 - блок вычислителя прогнозируемых координат (БВПК), способы-прототипы применить возможно, однако не рассматривается вариант, когда средства АП локации позволяют обеспечить пространственные показатели боевых возможностей систем разведки соединения ПВО за счет выключения активных РЛС (АРЛС).
Раскрытие изобретения
Решаемой задачей (техническим результатом) является совершенствование способа комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле.
Указанный технический результат достигается тем, что в способе комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле, за счет частичной замены в процессе ведения разведывательно-информационных действий активных РЛС на активно-пассивные и данная замена должна выражаться в разделении пространства и, как следствие, наблюдаемых воздушных объектов: на наблюдаемые только активными РЛС и полем активной локации; наблюдаемые только активно-пассивными РЛС (АПРЛС) и полем пассивной локации.
Разработанный способ основан на использовании АПРЛС с некооперируемым источником подсвета воздушного базирования (НИП ВБ), что позволяет сохранить показатели качества радиолокационного наблюдения системой радиолокационной разведки посредствам добавления в функциональные возможности пассивных РЛС работы в режиме активно-пассивной локации с некооперируемым источником подсвета воздушного базирования.
Основным показателем при комплексном применении полей активной и пассивной локации при использовании АПРЛС является величина сектора (ϕзам) замещения на излучение АРЛС.
Частичное замещение возможно за счет запрета на излучение АРЛС в секторе или сегменте сектора соответственно, (фиг. 2)
Для данного запрета на излучение АРЛС, при условии требований по сохранению боевых возможностей средств радиолокационной разведки необходимо, чтобы исключенный из обзора сектор или сегмент был под радиолокационным наблюдением активно-пассивных средств радиолокационной разведки с заданными показателями качества по обнаружению средств воздушного нападения (СВН). [1]
Для этого необходимо провести оценку динамики изменения параметров сектора замещения, величина которого зависит не только от параметров источника подсвета и приемного пункта, а также зависит от пространственной конфигурации активно-пассивной РЛС и источника подсвета. Данная конфигурация оказывает влияние на форму и размер рабочей зоны активно-пассивной РЛС с некооперируемым источником подсвета, (фиг. 3)
Таким образом необходимо начать с оценки рабочей зоны АПРЛС с НИП ВБ  и зоны обнаружения АРЛС
и зоны обнаружения АРЛС  , что позволит определить их соотнесенность
, что позволит определить их соотнесенность  , при условии совмещенных точек стояния радиолокационных средств в позиционном районе.
, при условии совмещенных точек стояния радиолокационных средств в позиционном районе.
Учитывая данные условия, в качестве исходных данным, будем иметь зону обнаружения активной РЛС  и воздушное пространство с внешними неуправляемыми
и воздушное пространство с внешними неуправляемыми  и управляемыми
и управляемыми  факторами источника радиоизлучения (ИРИ), учитывая которые в последующем возможно построить рабочую зону активно-пассивной РЛС
факторами источника радиоизлучения (ИРИ), учитывая которые в последующем возможно построить рабочую зону активно-пассивной РЛС
Где  - мощность ПРИ,
- мощность ПРИ,  - коэффициент направленного действия антенны ИРИ, А - эхо-сигнал ИРИ,
- коэффициент направленного действия антенны ИРИ, А - эхо-сигнал ИРИ,  - пространственно-временные параметры эхо-сигнала ИРИ, FD - частота Доплера эхо-сигнала, λ - длина волны,
- пространственно-временные параметры эхо-сигнала ИРИ, FD - частота Доплера эхо-сигнала, λ - длина волны,  - длительность импульса,
- длительность импульса,  - частота повторения импульса,
- частота повторения импульса,  - сектор замещения излучения активной РЛС.
- сектор замещения излучения активной РЛС.
Из фиг. 4 видно, что выход подсистемы  можно рассматривать как реакцию на неуправляемые
можно рассматривать как реакцию на неуправляемые  и управляемые
и управляемые  факторы со стороны входов
факторы со стороны входов  В результате динамическая модель подсистемы АПРЛС с НИП ВБ выражается как совокупность двух процессов:
В результате динамическая модель подсистемы АПРЛС с НИП ВБ выражается как совокупность двух процессов: 
XT - входное множество X в рамках временного множества Т.
YT - выходное множество Y в рамках временного множества Т.
Проведенный сравнительный анализ заявленного способа и аналогов-прототипов показал, что заявленный способ отличается тем, что выполняется дополнительная операция, заключающаяся в комплексном применении средств активной и активно-пассивной РЛС, на основе частичного замещения активной локации пассивной.
Техническим результатом является увеличение сектора замещения поля активной локации пассивным, основанном на наибольшем объеме пересечения РЗ АПРЛС  зоны обнаружения АРЛС
зоны обнаружения АРЛС 
Таким образом, заявляемое изобретение не известно из уровня техники, а также отсутствуют источники, в которых были бы представлены способы, имеющие признаки, сходные с признаками, отличающими заявляемое изобретение от способов-прототипов, а также свойства, совпадающие со свойствами заявляемого изобретения, в связи с чем можно считать, что оно обладает существенными отличиями.
Изобретение иллюстрируется следующими чертежами:
Фиг. 1 - трехпозиционная активно-пассивная радиолокационная система, осуществляющая наиболее близкий и заявляемый способы комплексного ведения радиолокационной разведки;
Фиг. 2 - вариант повышения скрытности функционирования активной РЛС кругового обзора: а - запрет на излучение в секторе, б - уменьшения мощности излучения при исключении из обзора сегмента сектора;
Фиг. 3 - рабочая зона активно-пассивной РЛС с НИП воздушного базирования;
Фиг. 4 - динамическая модель подсистемы АПРЛС с НИП ВБ с заданием процессов на входах и выходах системы;
Фиг. 5 - пересечение рабочей области АПРЛС и зоны обнаружения АРЛС;
Фиг. 6 - зависимость параметра объема перекрытия (Q) от энергетического параметра АПРЛС и ее пространственной конфигурации в условиях подвижного источника подсвета;
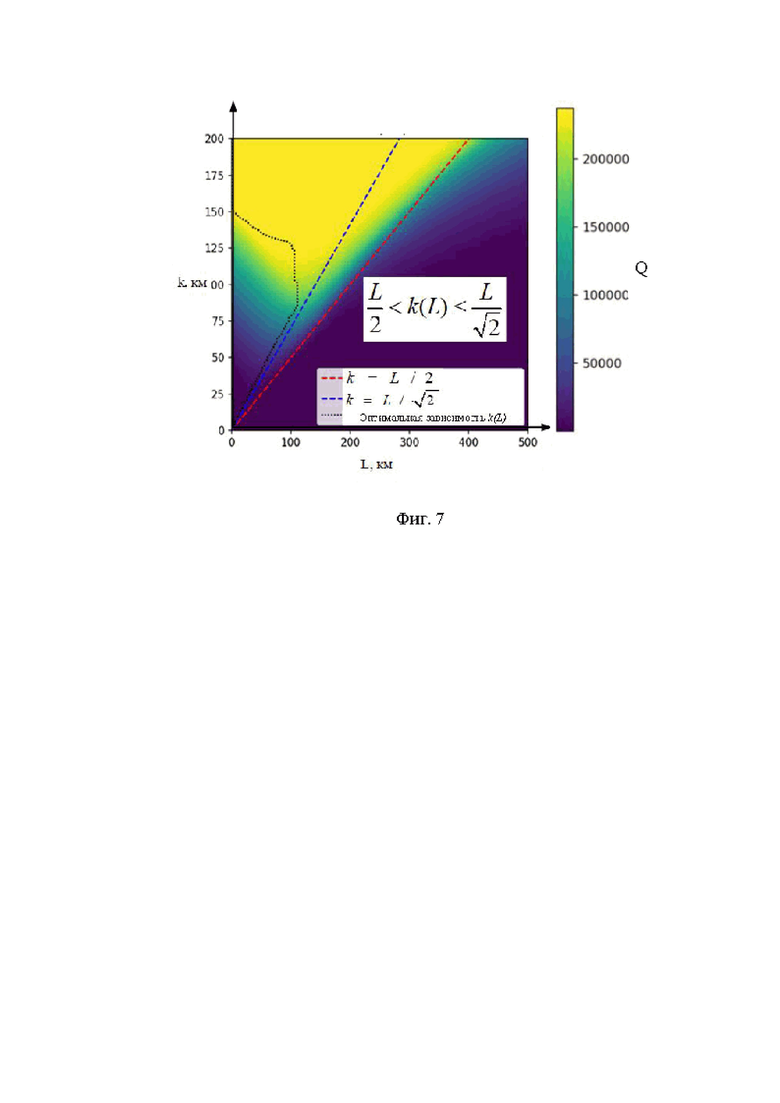
Фиг. 7 - сектор замещения поля активной локации пассивным относительно оптимальной зависимости k (L);
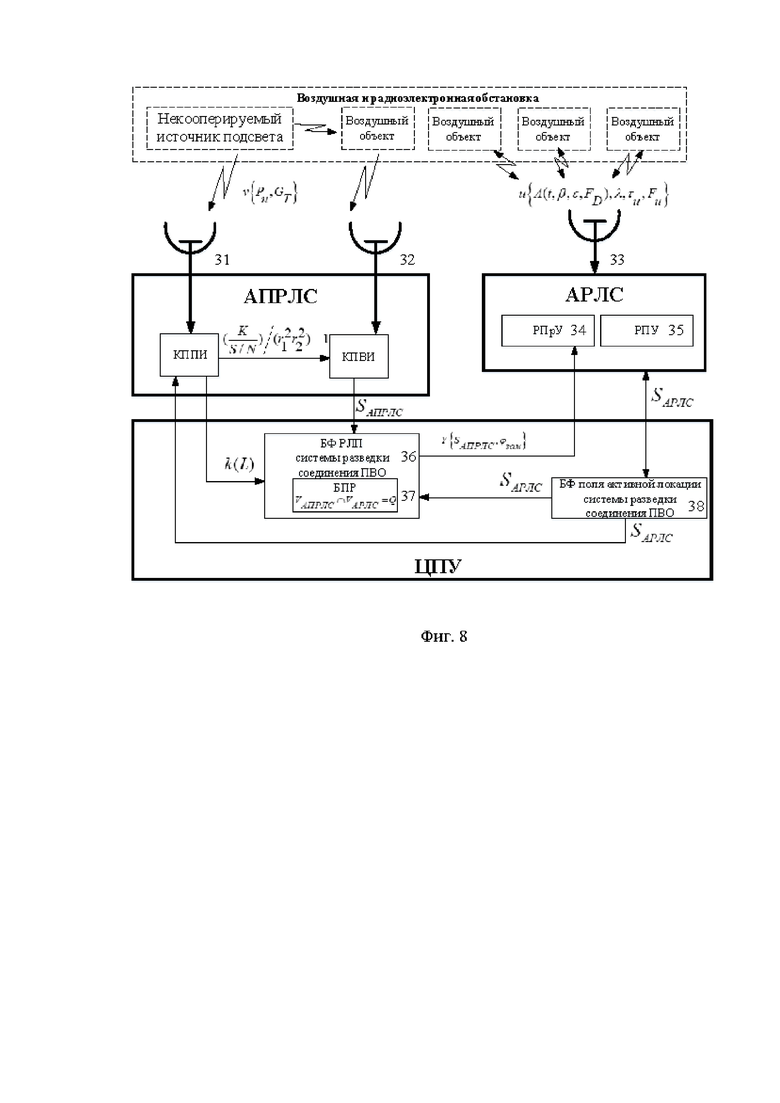
Фиг. 8 - заявляемое устройство комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле.
Устройство комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле, реализующее заявляемый способ, содержит (фиг. 8) параллельно соединенные антенны канала приема первичного излучения 31, канала приема вторичного излучения 32 активно-пассивной радиолокационной системы (АПРЛС), а также антенну активной радиолокационной системы (АРЛС) 33, радиоприемное устройство 34, радиопередающее устройство 35, центральный пункт управления (ЦПУ) с блоком формирования (БФ) радиолокационного поля (РЛП) системы разведки соединения противовоздушной обороны (ПВО) 36, блоком принятия решения 37 и блоком формирования (БФ) поля активной локации системы разведки соединения противовоздушной обороны (ПВО) 38.
Промышленная применимость.
Реализация заявляемого способа не встречает затруднений при современном уровне развития радиотехники и устройств цифровой обработки сигналов. Возможность реализации предложенного способа обеспечивает ему критерий «промышленная применимость».
По сравнению с прототипом, использование операций предложенного способа обеспечивает:
- наибольший объем перекрытия зоны обнаружения активной РЛС (АРЛС) в системе пассивной локации, за счет определения оптимальных параметров K, L;
- возможность выбора оптимального НИП, который позволит обеспечить максимальный сектор замещения на излучение активной РЛС;
- определение пределов зависимости k(L); что позволит определить области, которые следует исключить из рассмотрения, так как они приводят к вырожденным овалам.
Осуществление изобретения
Способ осуществляется следующим образом.
На первом этапе необходимо оценить зону обнаружения АРЛС  рассчитав ее с помощью уравнения (1).
рассчитав ее с помощью уравнения (1).
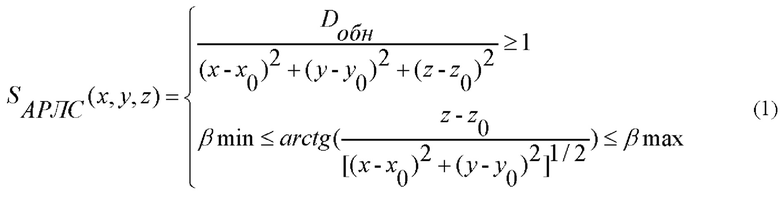
В данном выражении основными параметрами  являются радиус зоны обнаружения АРЛС (Dобн), сектор сканирования (βmin, βmax), а также декартовые координаты точки стояния АРЛС (х0, y0,z0).
являются радиус зоны обнаружения АРЛС (Dобн), сектор сканирования (βmin, βmax), а также декартовые координаты точки стояния АРЛС (х0, y0,z0).
На втором этапе рассчитаем рабочую зону АПРЛС с НИП ВБ ( ), которая задается уравнением для овалов Кассини (2).
), которая задается уравнением для овалов Кассини (2).

Из выражения (2) видно, что основными параметрами РЗ АПРЛС являются расстояние от некооперируемого источника подсвета воздушного базирования до активно-пассивной РЛС (L), определенное как база и выражаемое через
где  координаты НИП ВБ, а
координаты НИП ВБ, а  - координаты АПРЛС, а также максимальная дальность действия АПРЛС (k), выражаемой согласно теории разнесенной радиолокации из уравнения (5) [3]
- координаты АПРЛС, а также максимальная дальность действия АПРЛС (k), выражаемой согласно теории разнесенной радиолокации из уравнения (5) [3]
где r1 - расстояние от РЛС до цели, м; r2 - расстояние от НИП до цели, м; Pt - мощность передатчика, Вт; Gt - КНД передающей антенны; Gr - КНД приемной антенны; λ - длина волны, м; σb - эффективная поверхность цели, м2; k - постоянная Болыгмана, (1,38 × 10-23 Дж/К); Т0 - шумовая температура приемной системы, (290 К); Вп - ширина полосы шума фильтра; Lt - потери в системе передачи (>1); Lr - потери в системе приема (>1); Ft - коэффициент распространения радиоволны от передатчика до цели; Fr - коэффициент распространения радиоволны от приемника до цели; SN - отношение мощности сигнал/шум.
Исходя из исходных данных, знаем что значения Pt, GT, r1, r2 являются неуправляемыми внешними факторами и соответственно стохастическими, то форма рабочей зоны будет зависеть от изменения данных значений и соответственно это приведет к изменению параметра k, который согласно [3] связан с энергетической константой K [4], через произведение следующим образом

Данное выражения (7) позволяет выразить к, через отношение

где S/N является отношением сигнал/шум, а коэффициент K можно получить согласно следующего выражению
PT - мощность передатчика, Вт;
GT - КНД передающей антенны;
GR- КНД приемной антенны;
σB - эффективная поверхность цели, м2;
k - постоянная Больцмана, (1,38 × 10-23 Дж/К);
TS - шумовая температура приемной системы, (290 К);
Bn - ширина полосы шума фильтра;
LT - потери в системе передачи (>1);
LR - потери в системе приема (>1);
FT - коэффициент распространения радиоволны от передатчика до цели;
FR - коэффициент распространения радиоволны от приемника до цели.
Исходя из полученных выражений, если подставить (4) и (8) в (2), то можно получить выражение (10).

Данное выражение позволяет определить зависимость максимальной дальности действия АПРЛС от величины базы. Анализ указанной зависимости позволяет оценить форму РЗ АПРЛС.
На этапе решения поставленной задачи, эта информация необходима, но не достаточна, для оценки объема сектора замещения (Q). Для того чтобы оценить зависимость параметров сектора замещения от динамики изменения пространственной конфигурации, необходимо определить объем пересечения РЗ АПРЛС ( ) зоны обнаружения АРЛС (
) зоны обнаружения АРЛС ( ), что позволит оценить принадлежность точек обеим областям (
), что позволит оценить принадлежность точек обеим областям ( ) (фиг. 5)
) (фиг. 5)
Для оценки  необходимо решить логическое выражение
необходимо решить логическое выражение

Решение данного выражения позволит оценить объема сектора замещения (Q), с учетом изменения формы РЗ.
Данный параметр Q непосредственно зависит от изменения параметров k и L согласно выражению (8). Данная зависимость проиллюстрирована на фиг. 6. Определение данных параметров позволит оценить оптимальные параметры для построения РЗ АПРЛС, что в свою очередь позволит провести кластеризацию НИП.
Для оценки и определения оптимальных параметров РЗ необходимо учесть их предел, при выходе за который происходит вырождение овалов Кассини, что приводит к изменению формы РЗ.
В результате оптимизационного поиска получаем зависимость k (L). (фиг. 7)
Данная зависимость отражает изменение объема сектора замещения (Q) относительно изменению параметров k, L.. Объем сектора замещения (Q) прямо пропорционален величине сектора (ϕзам) замещения на излучение АРЛС. На данной зависимости также отмечены пределы зависимости k (L), где  это частный случай овала Кассини - лемниската Бернулли, а
это частный случай овала Кассини - лемниската Бернулли, а  это эллипсообразный овал Кассини.
это эллипсообразный овал Кассини.
Таким образом в соответствии с предложенным способом возможно оценить параметры НИП для построения РЗ АПРЛС с наибольшим объемом пересечения РЗ АПРЛС ( ) зоны обнаружения АРЛС (
) зоны обнаружения АРЛС ( ), что в свою очередь позволит определить наибольший сектор замещения поля активной локации пассивным.
), что в свою очередь позволит определить наибольший сектор замещения поля активной локации пассивным.
Таким образом, способ комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле включает следующие операции:
- оценка зоны обнаружения АРЛС;
- расчет рабочей зоны АПРЛС с НИП ВБ;
- определение максимальной дальность действия АПРЛС (k);
- определение энергетической константы (K);
- определение зависимости максимальной дальности действия АПРЛС от величины базы;
- оценка объема сектора замещения (Q).
Устройство, реализующее данный способ комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле представлено на фиг. 8.
Список используемой литературы
1. Петроченков Д.М., Тимошенко А.В., Филиппов Д.А. Повышение боевой устойчивости радиолокационной разведки в условиях радиоэлектронного и огневого противоборства // Военная мысль. №1, 2023 г. С. 51-60.
2. Оболонин И. А. Основы компьютерного проектирования и моделирования РЭС // Учебное пособие разработано для студентов факультета МРМ СибГУТИ, изучающих дисциплину «Основы компьютерного проектирования и моделирования РЭС». 2012 г. С. 324.
3. Willis N. J. Bistatic radar / N. J. Willis. - SciTech Publishing Inc, 2005. - 337 c.
4. Heiner Kuschel, Jurg Heckenbach, Jochen Schell Deployable Multiband Passive / Active Radar for Air Defense (DMPAR) // IEEE A&E SYSTEMS MAGAZINE, September 2013. P. 37-45.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КЛАССОВ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ ДЛЯ МНОГОДИАПАЗОННОГО РАЗНЕСЕННОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2020 |
|
RU2741057C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ЦЕЛИ В ДВУХПОЗИЦИОННОМ КОМПЛЕКСЕ ПАССИВНОЙ ЛОКАЦИИ С ИСПОЛЬЗОВАНИЕМ ЗОНДИРУЮЩИХ СИГНАЛОВ ИОНОСФЕРНОЙ ЗАГОРИЗОНТНОЙ РЛС | 2020 |
|
RU2737279C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| СПОСОБ УСТРАНЕНИЯ ЛОЖНЫХ ПЕЛЕНГОВ В ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ЕДИНИЧНОМ ОБЗОРЕ ВРАЩАЮЩЕЙСЯ АНТЕННО-ФИДЕРНОЙ СИСТЕМЫ | 2023 |
|
RU2817291C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ПОРАЖЕНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2011 |
|
RU2485540C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
Изобретение относится к области радиотехники и может быть использовано в наземных системах обзорной радиолокации для обнаружения и сопровождения сигналов от объектов назначения (целей). Технический результат заключается в создании усовершенствованного способа комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле. Заявленный способ осуществляют путем частичной замены в процессе ведения разведывательно-информационных действий активных РЛС на активно-пассивные, данная замена должна выражаться в разделении пространства и, как следствие, наблюдаемых воздушных объектов на наблюдаемые только активными РЛС и полем активной локации, наблюдаемые только активно-пассивными РЛС (АПРЛС) и полем пассивной локации. Разработанный способ основан на использовании АПРЛС с некооперируемым источником подсвета воздушного базирования (НИП ВБ), что позволяет сохранить показатели качества радиолокационного наблюдения системой радиолокационной разведки посредствам добавления в функциональные возможности пассивных РЛС работы в режиме активно-пассивной локации с НИП ВБ. Частичное замещение возможно за счет запрета на излучение АРЛС в секторе или сегменте сектора замещения соответственно. 2 н.п. ф-лы, 8 ил.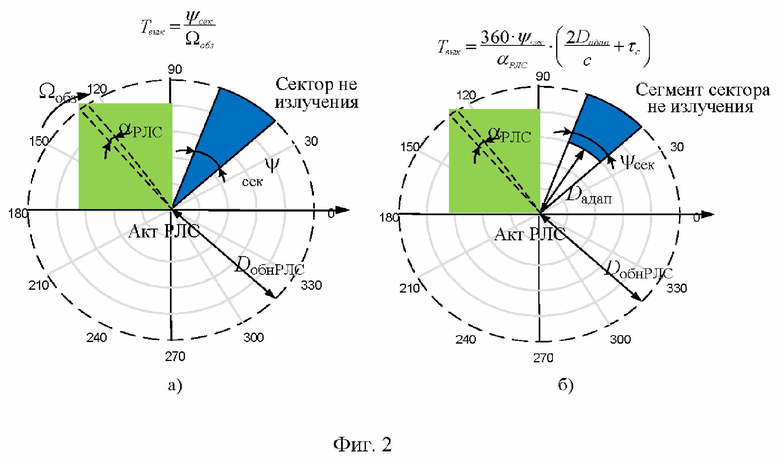
1. Способ комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле, основанный на использовании активно-пассивной радиолокационной системы (АПРЛС) с некооперируемым источником подсвета воздушного базирования (НИП ВБ), активной радиолокационной системы (АРЛС), заключающийся в осуществлении следующих операций:
выполняют оценку зоны обнаружения АРЛС  с помощью уравнения
с помощью уравнения
 ,
,
где Dобн - радиус зоны обнаружения АРЛС, (βmin, βmax) - сектор сканирования, х0, y0,z0 - декартовы координаты точки стояния АРЛС,
определяют рабочую зону АПРЛС с НИП ВБ  по уравнению овалов Кассини
по уравнению овалов Кассини
 ,
,
где  - координаты НИП ВБ,
- координаты НИП ВБ,  - координаты АПРЛС, k - максимальная дальность действия АПРЛС,
- координаты АПРЛС, k - максимальная дальность действия АПРЛС,
определяют максимальную дальность k действия АПРЛС, зависимость максимальной дальности действия АПРЛС от величины базы – расстояния между НИП ВБ и АПРЛС и анализируют эту зависимость для оценки формы рабочей зоны АПРЛС,
оценивают объем сектора замещения Q, определяемого как объем пересечения рабочей зоны АПРЛС и зоны обнаружения АРЛС,
определяют параметры АПРЛС с НИП для построения рабочей зоны АПРЛС с наибольшим сектором замещения поля активной локации пассивным,
разделяют пространство и наблюдаемые воздушные объекты на наблюдаемые только АРЛС и полем активной локации и наблюдаемые только АПРЛС и полем пассивной локации за счет замещения в процессе ведения радиолокационной разведки АРЛС на АПРЛС путем запрета на излучение АРЛС в наибольшем секторе замещения,
осуществляют радиолокационное наблюдение в исключенном из обзора АРЛС наибольшем секторе замещения посредством АПРЛС с НИП ВБ, параметры которой соответствуют наибольшему сектору замещения поля активной локации пассивным, с заданными показателями качества по обнаружению наблюдаемых воздушных объектов.
2. Устройство комплексного ведения радиолокационной разведки средствами активной, пассивной и активно-пассивной локации в едином радиолокационном поле, реализующее способ по п.1, содержащее параллельно соединенные антенны канала приема первичного излучения от некооперируемого источника подсвета воздушного базирования (НИП ВБ) и канала приема вторичного излучения от наблюдаемых воздушных объектов активно-пассивной радиолокационной системы (АПРЛС), антенну активной радиолокационной системы (АРЛС), радиоприемное устройство АРЛС, радиопередающее устройства АРЛС, центральный пункт управления (ЦПУ) с блоком формирования (БФ) радиолокационного поля (РЛП) системы разведки соединения противовоздушной обороны (ПВО), содержащий блок принятия решения и блок формирования (БФ) поля активной локации системы разведки соединения противовоздушной обороны (ПВО), в устройстве реализовано комплексное применение полей и средств активной и пассивной радиолокации в системе разведки соединения ПВО, причем активные и пассивные средства радиолокации работают отдельно друг от друга, при этом устройство выполнено с возможностью объединения радиолокационной информации АРЛС и АПРЛС с НИП ВБ для оценки зоны обнаружения АРЛС, максимальной дальности действия и параметров рабочей зоны АПРЛС с НИП ВБ для построения рабочей зоны АПРЛС с наибольшим сектором замещения поля активной локации пассивным, в котором осуществляют запрет на излучение АРЛС и радиолокационное наблюдение посредством АПРЛС с НИП ВБ с соответствующими параметрами.
| ПЕТРОЧЕНКОВ Д.М., ТИМОШЕНКО А.В., ФИЛИППОВ Д.А | |||
| Повышение боевой устойчивости радиолокационной разведки в условиях радиоэлектронного и огневого противоборства // ВОЕННАЯ МЫСЛЬ: ежемесячный военно-теоретический журнал | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сс | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ АВИАЦИОННО-КОСМИЧЕСКИХ ОБЪЕКТОВ, НАБЛЮДАЕМЫХ ГРУППИРОВКОЙ СТАНЦИЙ СЛЕЖЕНИЯ | 2004 |
|
RU2279105C2 |
| ВАСИЛЬЕВ А.В., КОЛБАСКО И.В | |||
| Применение | |||

