Изобретение относится к системам радиоэлектронного мониторинга и радиолокации и может быть использовано при разработке перспективных пассивно-активных станций радиоэлектронного мониторинга (СРМ) или при модернизации существующих.
Для обеспечения контроля воздушного пространства необходимо обнаруживать объекты с высокой вероятностью на границе контролируемого пространства, измерять их пространственные координаты с требуемой точностью, осуществлять процедуры траекторного (трассового) сопровождения целей.
Для увеличения скрытности работы СРМ необходимо минимизировать время ее работы на излучение.
Технический результат достигается тем, что:
- пассивно-активная станция радиоэлектронного мониторинга строится в виде совокупности пассивного и активного каналов;
- пассивный канал выполняет типовые задачи радиотехнического мониторинга – обзор пространства, поиск и идентификация цели, определение угловых направлений на цель – азимутального и угломестного пеленгов;
- активный канал в режиме радиомолчания наводится на обнаруженную пассивным каналом цель и излучает зондирующие сигналы;
- излучение сигналов активным каналом прекращается после определения координат и параметров движения цели, а дальность оценивается за счёт процедуры ее косвенного измерения.
Известен способ контроля воздушного пространства [1. Патент РФ № 2215303, МПК G01S 13/00. Способ контроля воздушного пространства, опубл. 27.10.2003, бюл. № 30], заключающийся в его обзоре с помощью РЛС, приёме отражённой объектом энергии внешнего радиоэлектронного средства (РЭС), определения границы зоны, в которой отношение отражённой объектом энергии РЭС к шуму больше порогового значения, и излучении сигнала РЛС только в те направления зоны, в которых обнаружена отражённая энергия РЭС.
Недостатком данного способа является то, что зона, в пределах которой отношение отражённой объектом энергии РЭС к шуму больше порогового значения, формируется за счёт энергии внешних источников излучения, в том числе и расположенных на недоступной территории, например, сопредельных государств. Это приводит к тому, что формирование данной зоны носит случайных характер, а использование таких источников, облучающих осматриваемый участок зоны достаточным уровнем мощности, как правило, требует большого времени ожидания облучения.
Известен способ определения координат целей, облучаемых внешним источником радиоизлучений [2. Патент РФ № 2530808, МПК G01S 13/00. Способ определения координат целей и комплекс для его реализации, опубл.10.10.2014, бюл. № 28], основанный на приеме отраженных целями радиоизлучений, измерении их угловых координат с помощью пассивной радиолокации, определении дальности хотя бы до одной из целей с помощью активной радиолокации, вычислении дальности до других целей, при этом в качестве источника радиоизлучений выбирают радиолокационную станцию, расположенную за горизонтом, с известными координатами и параметрами излучений. По сигналам загоризонтной РЛС облучающей контролируемую зону, определяют моменты приема отраженных сигналов от целей, измеряют дальность до одной из целей, вычисляют момент излучения зондирующего сигнала, по которому вычисляют дальности до других целей, облучаемых этим сигналов, вычисляют скорости этих целей, осуществляют их первичный захват и ведут их автосопровождение с помощью пассивной радиолокации, а в необходимых случаях вновь определяют дальность хотя бы до одной из них с помощью активной радиолокации и уточняют момент излучения сигнала, по его значению уточняют дальности до других целей и их скорости.
Недостатком данного способа является то, что для обнаружения цели используется сигнал сторонней РЛС, временные рамки работы которой носят стохастических характер, а, следовательно, возможны ситуации пропуска цели.
Известен способ определения координат объектов [3. Патент РФ № 2226701 МПК G01S 3/74. Способ определения координат объектов и радиолокационная станция для его реализации, опубл. 10.04.2004, бюл. № 10], облучаемых внешним источником радиоизлучений, основанный на приёме отражённых объектами радиоизлучений внешних источников, измерении временного сдвига между этими радиоизлучениями и угловых координат объектов, вычислении дальностей до объектов, отличающийся тем, что дополнительно принимают прямое радиоизлучение внешнего источника, измеряют его угловые координаты, временные сдвиги между прямым и отражёнными радиоизлучениями внешнего источника, способом активной радиолокации измеряют дальность до одного из объектов, которую используют для вычисления дальностей до остальных объектов.
Недостатком данного способа является то, что для его реализации необходимо осуществить приём прямого радиоизлучения внешнего источника, измерение его угловых координат, временных сдвигов между прямым и отражёнными радиоизлучениями внешнего источника. Данные процедуры могут быть не реализованы вследствие того, что внешний источник может быть вне дальности радиогоризонта.
Известен [4. Патент РФ № 2285939, МПК G01S 7/36. Способ контроля воздушного пространства, облучаемого внешними источниками излучения, и радиолокационная станция для его реализации, опубл. 20.10.2006, бюл. № 29] способ контроля воздушного пространства, облучаемого внешними источниками излучения, заключающийся в обзоре пространства РЛС в пассивном режиме, в приёме отражённой объектом энергии внешнего РЭС, в определении границ зоны, в пределах которых отношение отражённой объектом энергии РЭС к шуму больше порогового значения, и в излучении сигналов РЛС в активном режиме только в те направления зоны, в которых обнаружена отражённая энергия РЭС. Данный активный режим отличается тем, что осуществляет приём энергии того внешнего РЭС, время ожидания которого при облучении осматриваемого направления наименьшее и не превышает допустимого, определяемого, исходя из допустимого времени увеличения периода обзора РЛС. При этом используемая информация о временных интервалах работы РЭС на излучение от средств радиомониторинга запоминается и регулярно обновляется для каждого направления зоны обзора РЛС.
Недостатком данного решения является то, что для его реализации необходимо использование сигналов сторонних РЛС, кроме того, время работы активной РЛС не регламентировано, что может снизить скрытность ее работы.
Известен способ радиолокационного обнаружения и сопровождения объектов и РЛС для его реализации [5. Патент РФ № 2149421. МПК G01S 13/04. Способ радиолокационного обнаружения и сопровождения объектов и РЛС для его реализации. Опубл. 20.05.2000 Бюл. № 14], основанный на пеленгации излучений объекта, отличающийся тем, что осуществляют поиск и обнаружение объекта в запеленгованном направлении, измерение его координат с помощью РЛС и сопровождение по излучениям с использованием измеренного значения скорости. Операции РЛС повторяют, если погрешность сопровождения оказывается больше допустимой, либо измеренные координаты пеленгов отклонились от экстраполированных больше допустимого значения, кроме того, измеряют параметры излучений и операции РЛС повторяют в случае их изменения, а при исчезновении излучений или при достижении объектом заранее установленного рубежа переходят на сопровождение в активном режиме.
Недостатком способа является отсутствие приоритетности работы по целям активным каналом, отсутствие возможности длительного сопровождения целей по данным пассивного канала, что снижает скрытность работы РЛС и невозможность сопровождения маневрирующих целей.
Известен способ оценки и прогнозирования кинематики движущегося излучателя (цели, излучающей электромагнитные волны) [6. Заявка на патент США US 2009109082 A1, Augmented passive tracking of moving emitter МПК: G01S13/00, опубл. 30.04.2009), на которую получен патент на изобретение US 7626538 B2 МПК: G01S7/021, опубл. 12.01.2009], в котором сопровождение по излучениям с использованием измеренного с помощью активного канала РЛС значения скорости, где для определения координат цели производится вычисление проекций вектора скорости цели на оси декартовой системы координат и косвенное вычисление дальности до цели по измерениям пеленгов цели пассивным каналом РЛС.
Данный способ выбран в качестве прототипа.
Недостатком данного способа является то, что траекторное сопровождение возможно только для равномерно-движущихся целей и невозможность сопровождения маневрирующих целей.
Техническим результатом предлагаемых решений является как сокращение времени работы станций радиоэлектронного мониторинга на излучение, так и возможность траекторного сопровождения маневрирующих целей.
Сущность изобретения заключается в построении станции радиоэлектронного мониторинга в виде совокупности двух каналов – пассивного и активного. Функционал пассивного канала СРМ соответствует средствам радиотехнического мониторинга (радиотехнической разведки) и направлен на решение типовых задач пассивной локации - поиск, обнаружение, идентификация цели, измерение ее угловых координат и пеленговое сопровождение цели. Назначение активного канала ограничивается доопределением третьей координаты пространственного положения цели – дальности. По существу, активный канал представляет собой радиодальномер, включаемый в тех угловых направлениях, где обнаружена цель пассивным каналом. После обнаружения цели и измерения дальности до нее, определения проекций вектора скорости цели на оси прямоугольной системы координат работа активного канала прекращается. Траекторное сопровождение цели осуществляется по измеренным пассивным каналом пеленгам (азимутальным и угломестным) и совокупности измеренных с помощью активного канала проекций вектора скорости цели на оси декартовой системы координат и дальности.
Достигаемый технический результат – увеличение скрытности работы станции радиоэлектронного мониторинга и уменьшение затрачиваемой энергии на поиск, обнаружение цели и определение ее координат. Кроме того, ограниченный функционал активного канала по отношению к многофункциональным РЛС приводит к значительному сокращению объема аппаратных средств, их стоимости и эксплуатационных издержек.
Сущность изобретения поясняется фиг. 1, фиг. 2 и фиг. 3.
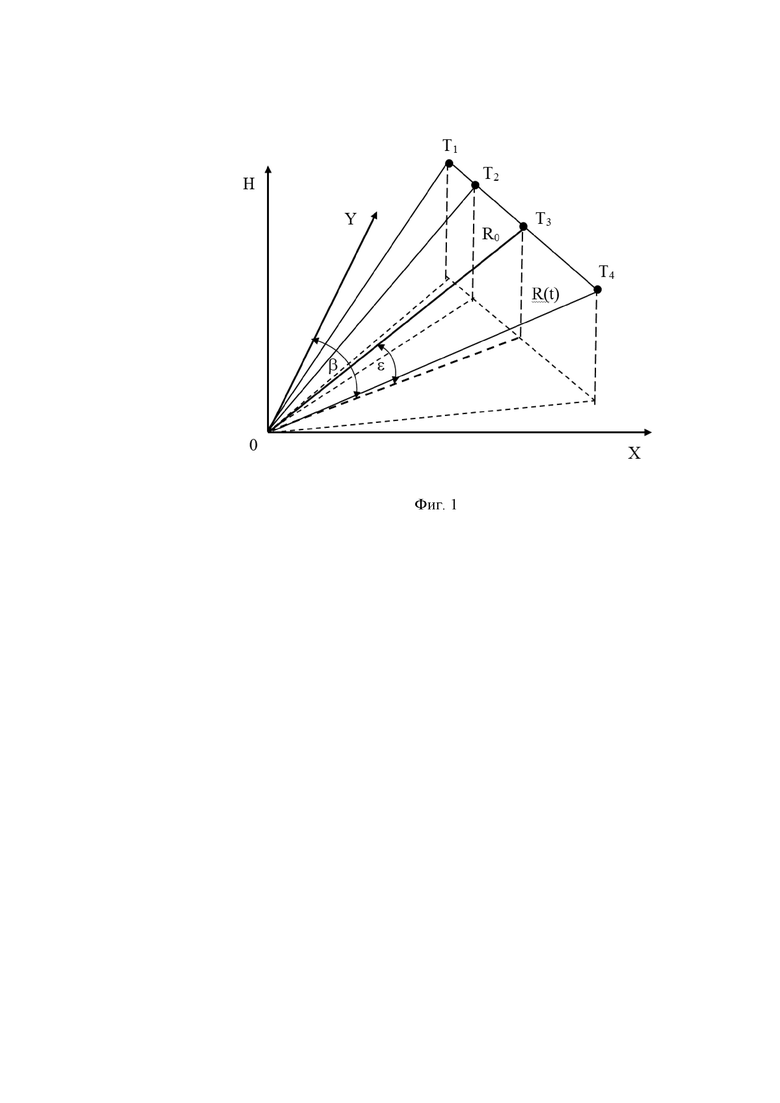
На фиг. 1 приведено пояснение геометрии задачи, где
X,Y,H - оценки проекций вектора скорости цели на оси прямоугольной системы координат;
R- дальность;
ε- угол места;
β- азимут цели.
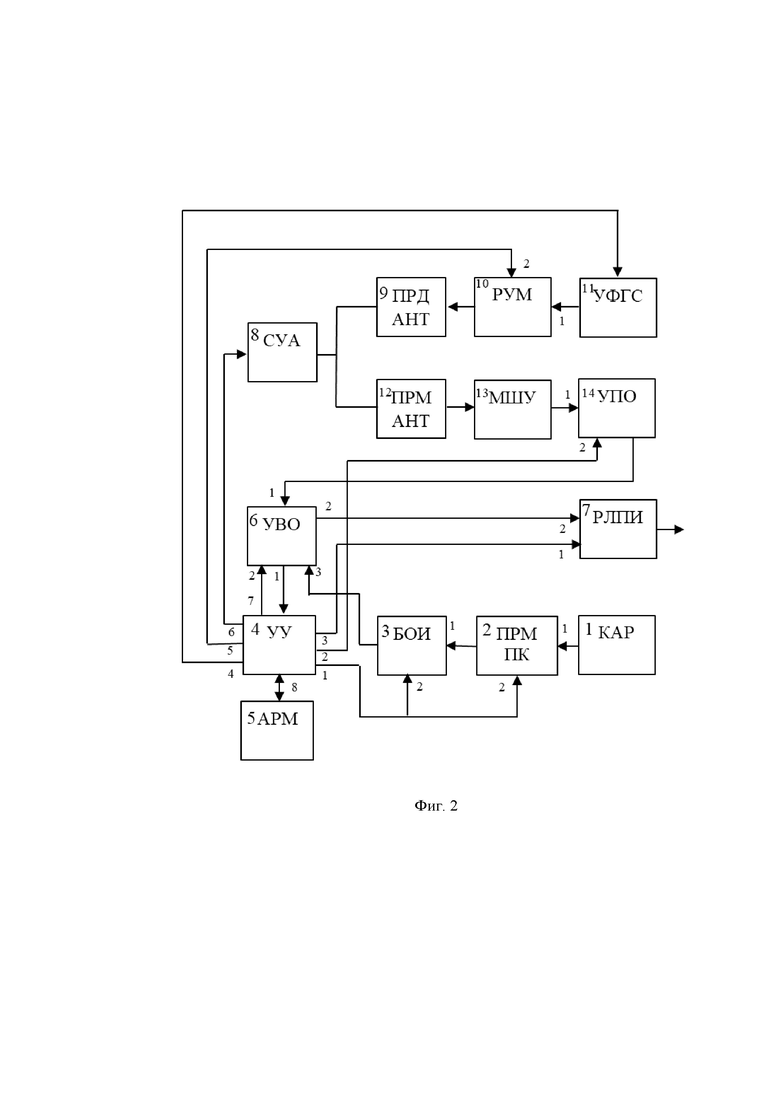
На фиг. 2 приведена структурная схема устройства для реализации заявляемого способа, где
1 – кольцевая антенная решётка (КАР);
2 – радиоприёмное устройство пассивного канала (ПРМ ПК);
3 – блок обработки информации (БОИ);
4- устройство управления (УУ);
5 – автоматизированное рабочее место (АРМ);
6 – устройство вторичной обработки (УВО);
7 – радиолиния передачи информации (РЛПИ);
8 – система управления антенной (СУА);
9 – передающая антенна (ПРД АНТ);
10 –регулируемый усилитель мощности (РУМ);
11 – устройство формирования и генерирования сигналов (УФГС);
12 – приёмная антенна (ПРМ АНТ);
13 – малошумящий усилитель (МШУ);
14 – устройство первичной обработки (УПО).
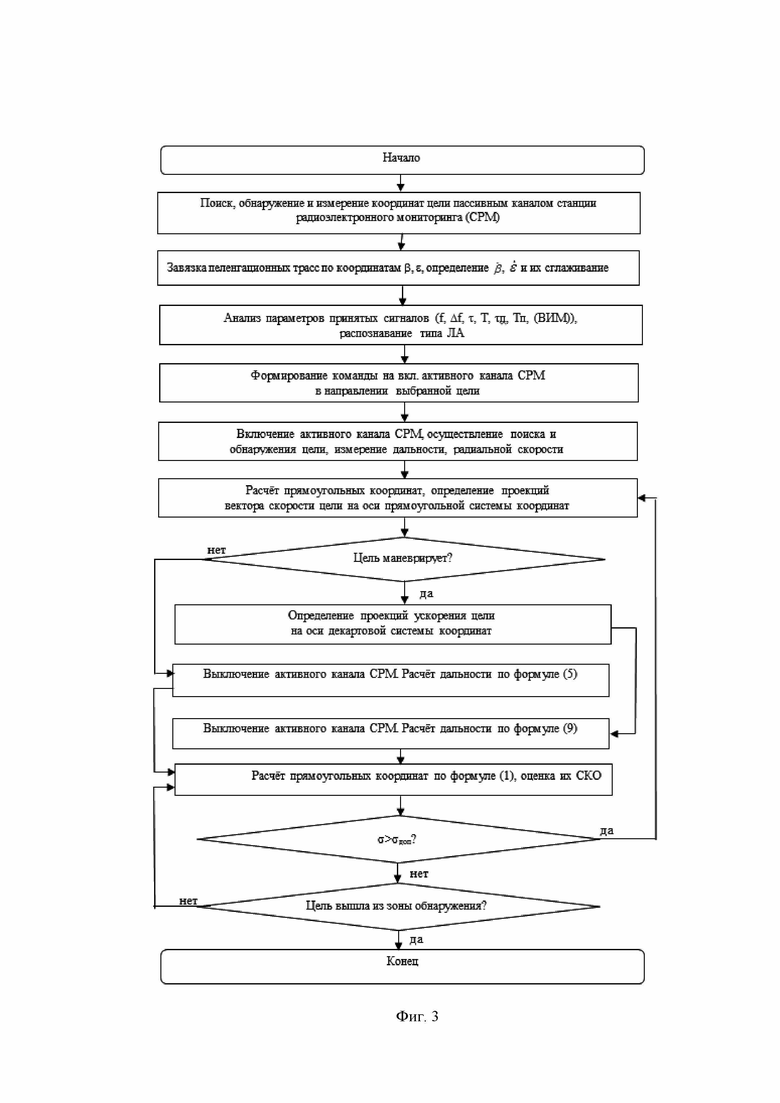
На фиг.3 приведена укрупнённая блок-схема алгоритма, реализующего заявляемый способ.
Пассивный канал производит поиск и обнаружение цели и измерение ее угловых координат на участке траектории Т1Т2 (см. фиг. 1), а при наличии достаточности объёма сигнальной информации и идентификацию цели (распознавание ее класса). При принятии решения оператором или в автоматическом режиме по наиболее опасным (важным) целям формируется команда для разворота антенной системы активного канала СРМ в направлении цели. На участке траектории Т2Т3 (см. фиг. 1), активным каналом осуществляется допоиск цели, ее обнаружение, измерение дальности и вычисление прямоугольных координат


где: 


Дифференцирование выражения для наклонной дальности 

где: 
Сглаживание прямоугольных координат и проекций вектора скорости цели на оси декартовой системы координат осуществляется известными алгоритмами 
Вычисление текущего значения параметра при его измеренных начальных условиях и первой производной [8. Соловьев В.И. Инерциальные навигационные системы: учеб. пособие / В.И. Соловьев, П.Г. Шабалов. – Самара: Изд-во Самар. гос. аэрокосм. ун-та, 2011. – 72 с.] реализуется по зависимости
где: 

Подстановка (2) в (5) с учётом (4) позволяет реализовать текущее измерение дальности на участке траектории Т3Т4 (см. фиг. 1) за счёт измеренных значений начальной дальности, запомненных значений проекций вектора скорости цели и текущего измерения угловых координат

или

где: 
При реализации процедуры (5) радиопередающее устройство выключается. При превышении ошибок определения дальности по (5) некоторого порогового значения или пропадании сигналов источника радиоизлучения осуществляется включение передатчика СРМ, при этом в зависимости от дальности может осуществляется режим вобуляции мощности, для повышения скрытности работы.
Дифференцирование по времени (2) дает формулу для радиального ускорения воздушного объекта
где: 


При измерении ускорения для определения текущей координаты используется зависимость, приведённая в [9. Коваленко, В.В. Малогабаритная инерциальная система: учебное пособие/ В.В. Коваленко, А.Н. Лысов. – Челябинск: 2010. – 53 с.]


Подстановка (6) в (7) позволяет реализовать измерение дальности до цели на участке траектории Т3Т4 (см. фиг. 1) за счёт запомненных проекций вектора скорости цели и ее ускорения
или
Достоинством выражения (9) является возможность восстановления дальности при нелинейном движении траектории воздушного объекта.
В процессе работы системы известными формулами [10. Вентцель, Е. С. Теория вероятностей: учебник / Е.С. Вентцель. — 12-е изд., стер. — Москва: ЮСТИЦИЯ, 2018. — 658 с.] оценивается СКО определения прямоугольных координат, и если они выше допустимого значения σдоп, то производится включение активного канала для уточнения координат и параметров движения цели.
Радиопередающее устройство может генерировать радиосигналы различной длительности, периода повторения и закона модуляции, что позволяет добиться структурной скрытности работы активного канала.
Поставленная задача (технический результат) решается также тем, что предлагаемый способ траекторного сопровождения цели в пассивно-активной системе радиоэлектронного мониторинга, отличается тем, что для сопровождения цели производится вычисление проекций вектора скорости цели на оси декартовой системы координат и косвенное вычисление дальности до цели по измерениям пеленгов цели пассивным каналом, а в случае маневрирующей цели вычисляются проекции вектора скорости цели и ускорения цели на оси декартовой системы, радиальная скорость цели, угловые координаты цели и их первые производные.
Работа пассивно-активной системы радиоэлектронного мониторинга по этому способу состоит в следующем (фиг. 2).
После обнаружения источника радиоизлучения (ИРИ) пассивным каналом, состоящим из кольцевой антенной решётки (КАР) 1, приёмника пассивного канала (ПРМ ПК) 2 и блока обработки информации (БОИ) 3, устройством вторичной обработки (УВО) 6 осуществляется завязка трассы по измерениям угловых координат, и через устройство управления (УУ) 4 формуляр пеленгационной трассы, поступающий с его 8 выхода, отображается на автоматизированном рабочем месте (АРМ) 5. Дополнительным приоритетом выбора цели – радиоизлучающего воздушного объекта (ВО) – для работы по ней активного канала является результат решения задачи распознавания классов (типов) летательных аппаратов (ЛА) по излучениям бортовых радиоэлектронных средств (БРЭС). Анализ радиоизлучений осуществляется в блоке обработки информации (БОИ) 3, где принимается решение о принадлежности наблюдаемого источника радиоизлучения к одному из классов БРЛС из заданного алфавита по результатам обработки вектора сигнальных признаков, компонентами которого являются измеренные значения несущей частоты f, ширины спектра Δf сигнала, длительности τ и периода следования T импульсов, длительности τп и периода следования пачек Тп импульсов, наличие и вид внутриимпульсной модуляции сигналов.
Включение блоков БОИ 3, ПРМ ПК 2 по их вторым входам осуществляется с АРМ 5 посредством команды с УУ 4, формируемой с его первого выхода.
По выбранному оператором пеленгу, отображаемому на АРМ 5, или в автоматическом режиме с выхода 6 УУ 4 формируется команда в систему управления антенной (СУА) 8, которая реализует разворот передающей антенны (ПРД АНТ) 9 и соосно закреплённой с ней приёмной антенны (ПРМ АНТ) 12 в направлении цели. По команде с выхода 4 УУ 4 осуществляется включение устройства формирования и генерирования сигналов (УФГС) 11 и осуществляется допоиск цели в переделах сектора целеуказания по азимуту и углу места, с выхода 2 УУ 4 осуществляется стробирование устройства первичной обработки по пеленгу.
Усиленные в малошумящем усилителе (МШУ) 13 сигналы, отражённые от цели, поступают по первому входу в устройство первичной обработки (УПО) 14, где осуществляется их обнаружение и измерение дальности до цели.
Измеренное значение дальности до цели с выхода УПО 14 поступает на первый вход УВО 6, где осуществляется оценка прямоугольных координат цели, проекций ее вектора скорости на оси декартовой системы координат, а в случае маневрирующей цели и проекций ускорения цели.
После оценивания параметров траектории и анализа воздушной обстановки оператором (или автоматически) с АРМ 5 формируется команда на выключение УФГС 11, которая осуществляется с выхода 4 УУ 4.
При выключенном УФГС 11 сопровождение цели осуществляется в УВО 6 по формулам (5) или (9), при этом с выхода 6 УУ 4 в СУА 8 подаются команды на слежение за целью. При нарастании ошибок оценивания параметров траектории или прекращении излучения источника УВО 6 с первого выхода формирует команду на УУ 4, которое по выходу 4 формирует команду на включение УФГС 11, что позволяет уточнить параметры движения цели. При этом с выхода 5 УУ формируется команда на регулируемый усилитель мощности (РУМ) 10, который позволяет управлять энергией УФГС 11. Потребителю информация о целях передаётся со второго выхода УВО 6 на второй вход радиолинии передачи информации (РЛПИ) 7, которая управляется командой по первому входу, формируемой с выхода 3 УУ 4.
Прекращением работы по цели является ее выход из зоны обнаружения по данным как активного, так и пассивного каналов или передача ее на сопровождение иным средствам контроля воздушного пространства.
Изобретение относится к системам радиоэлектронного мониторинга и радиолокации и может быть использовано при разработке перспективных пассивно-активных станций радиоэлектронного мониторинга или при модернизации существующих. Техническим результатом является сокращение времени работы станций радиоэлектронного мониторинга на излучение в процессе местоопределения цели и ее сопровождения. В заявленном способе осуществляют поиск и обнаружение объекта в запеленгованном направлении, измерение его координат (дальности) с помощью РЛС и сопровождение по излучениям (переизлучениям) с использованием измеренного с помощью активного канала РЛС значения скорости. Для определения координат цели производится вычисление проекций вектора скорости цели на оси декартовой системы координат и косвенное вычисление дальности до цели по измерениям пеленгов цели пассивным каналом РЛС. Дополнительно вычисляются радиальные скорости целей, угловые координаты целей и их первые производные, обеспечивая тем самым сопровождение маневрирующих целей. 3 ил.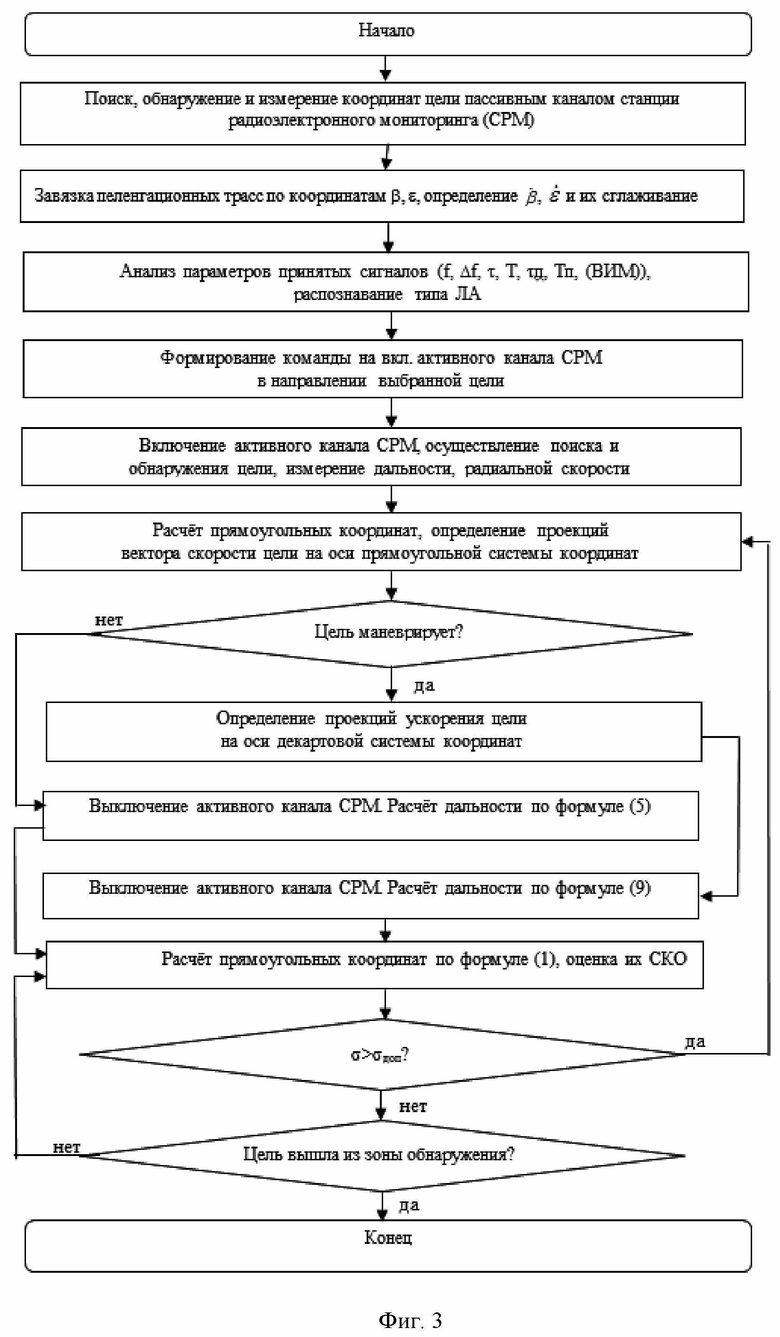
Способ радиолокационного обнаружения и сопровождения движущихся объектов, основанный на поиске и обнаружении объекта в запеленгованном направлении, измерении его координат (дальности) с помощью РЛС и сопровождении по излучениям (переизлучениям) с использованием измеренного с помощью активного канала РЛС значения скорости, где для определения координат цели производится вычисление проекций вектора скорости цели на оси декартовой системы координат и косвенное вычисление дальности до цели по измерениям пеленгов цели пассивным каналом РЛС, отличающийся тем, что дополнительно вычисляются радиальные скорости целей, угловые координаты целей и их первые производные, обеспечивая тем самым сопровождение маневрирующих целей.
| US 2009109082 A1, 30.04.2009 | |||
| Способ нелинейного управления инерционным приводом антенны, обеспечивающий высокую устойчивость сопровождения интенсивно маневрирующих объектов | 2017 |
|
RU2661346C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2530808C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2149421C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ В РЕЖИМЕ АКТИВНОЙ ЛОКАЦИИ ГИДРОАКУСТИЧЕСКОГО ИЛИ РАДИОЛОКАЦИОННОГО КОМПЛЕКСА | 2003 |
|
RU2260197C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2226701C2 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| CN 110488277 A, 22.11.2019 | |||
| CN 107064882 A, 18.08.2017 | |||
| JP 3736112 B2, 18.01.2006. | |||

