Изобретение относится к радиолокации и может быть использовано в двухпозиционном комплексе пассивной локации (ДП КПЛ) или в пассивном режиме активных РЛС поверхностной электромагнитной волны декаметрового диапазона для определения дальности воздушных целей, в том числе низколетящих, а также надводных морских целей, которые облучаются зондирующими сигналами (ЗС) ионосферной загоризонтной РЛС (ЗГ РЛС) [1, С. 454-457].
Известен способ определения дальности маловысотных малозаметных целей в «просветном» КПЛ, состоящем из двух разнесенных на малую базу приемных пунктов, позиции которых ортогональны к линии визирования передающей позиции ЗГ РЛС, облучающей эти цели. Для обнаружения цели, определения ее дальности используется информация о спектральных характеристиках отраженного сигнала и времени перехода частоты биений этого сигнала через нуль [2].
Недостатки способа:
- малые размеры зоны обнаружения КПЛ, так как обнаружение цели возможно только при ее нахождении между двумя его приемными пунктами и ЗГ РЛС;
- при нахождении позиции КПЛ вблизи государственной границы или на морском побережье можно использовать сигналы только иностранных ЗГ РЛС.
Известен триангуляционный способ определения местоположения источника радиоизлучений (ИРИ) в двухпозиционном КПЛ по данным измерений двух азимутов. Дальность до ИРИ в первом приемном пункте ПП1 вычисляется по формуле [3, С. 174].

где Б - расстояние (база) между ПП1 и вторым приемным пунктом ПП2;
r1 - дальность от ПП1 до цели;
β1 - азимут цели относительно базы, измеренный в ПП1;
β2 - азимут цели относительно базы, измеренный в ПП2.
Недостатки способа:
- низкая точность определения дальности цели при малой базе и больших ошибках измерениях азимута;
- появление ложно обнаруживаемых целей при нахождении в зоне обзора КПЛ нескольких целей и сложность их устранения.
Известен разностно-дальномерный способ определения дальности цели, основанный на измерении разности расстояний от источника излучений до приемных позиций [4, С. 366-367].
Недостатки способа:
- необходимость синхронизации приемных пунктов по частоте и фазе принимаемых сигналов;
- необходимость реализации широкополосных линий связи между позициями;
- в состав КПЛ должно входить не менее трех приемных позиций.
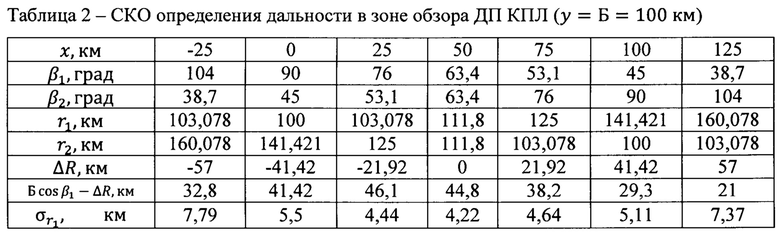
Наиболее близким аналогом заявляемому способу (прототипом) является двухпозиционный угломерно-разностно-дальномерный способ определения дальности цели, сущность которого поясняется в фиг. 1.
Зондирующий сигнал ЗГ РЛС распространяется пространственной ионосферной волной от ее передающей антенны и облучает цель в точке С. Отраженный от цели сигнал распространяется поверхностной земной электромагнитной волной и принимается в пассивных приемных пунктах позиций ПП1 и ПП2. С помощью этого сигнала в ПП1 измеряют азимут цели β1 относительно базы. Принятый в ПП2 высокочастотный отраженный от цели сигнал передают по широкополосной линии связи в ПП1, где измеряют разность дальностей ΔR от цели до приемных позиций.
Дальность r1 до цели в ПП1 определяют по формуле [4, С. 368-369]:

где r1 - дальность от ПП1 до цели;
r2 - дальность от ПП2 до цели;
ΔR=r1-r2 - разность дальностей.
Недостатки прототипа:
1. Из-за неучета влияния ионосферы на определение разности дальностей ΔR появляются большие систематические ошибки определения дальности цели.
2. Необходимость реализации широкополосных линий связи между позициями ПП1 и ПП2.
3. Необходимость синхронизации приемных пунктов по частоте и фазе принимаемых сигналов.
Техническим результатом заявленного изобретения является устранение или уменьшение систематических ошибок определения дальности цели за счет учета влияния ионосферы на распространение зондирующих сигналов ЗГ РЛС, упрощение аппаратуры КПЛ за счет применения узкополосных линий связи между позициями и возможность использования для подсвета цели как отечественных ЗГ РЛС, находящихся на территории страны, так и зарубежных ЗГ РЛС, находящихся за пределами страны.
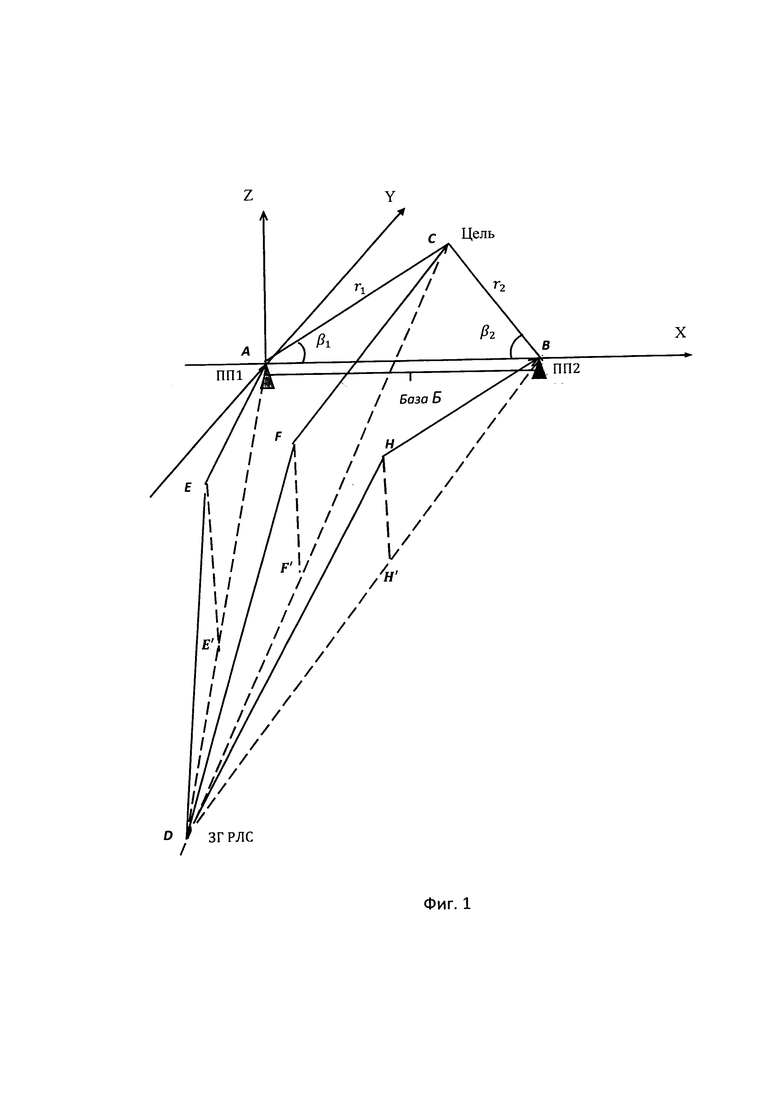
Сущность заявляемого способа поясняется фиг. 1 и фиг. 2.
Для достижения технического результата в заявленном способе так же, как в прототипе, осуществляют в двух приемных позициях ДП КПЛ, разнесенных на местности на расстояние, называемое базой Б, прием отраженных сигналов от цели, подсвеченной зондирующими сигналами (ЗС) ЗГ РЛС. В первой приемной позиции ПП1, находящейся в начале местной системы координат ДП КПЛ, измеряют азимут цели β1 относительно линии базы. Принятые во второй приемной позиции ПП2 сигналы передают в первую приемную позицию ПП1, в которой определяют разность дальностей до цели ΔR и вычисляют дальность до цели r1 по формуле

В отличие от прототипа, согласно изобретению, в приемных позициях ПП1 и ПП2 принимают зондирующие сигналы ЗГ РЛС. Эти ЗС используют в качестве опорных сигналов в устройствах корреляционно - базовой обработки радиолокационных сигналов в ПП1 и ПП2 для обнаружения сигнала цели. В ПП1 измеряют разность ΔS01 между путем распространения ЗС через ионосферу DE+EA от передающей позиции ЗГ РЛС до ПП1 и путем распространения ЗС через ионосферу DF+FC от передающей позиции ЗГ РЛС до цели, далее путем СА распространения сигнала поверхностной электромагнитной волной, равным дальности r1 до ПП1:

Аналогичным способом в ПП2 измеряют разность ΔS02 между путем распространения ЗС через ионосферу DH+HB от передающей позиции ЗГ РЛС до ПП2 и путем распространения ЗС через ионосферу DF+FC от передающей позиции ЗГ РЛС до цели, далее путем СВ распространения сигнала поверхностной электромагнитной волной, равным дальности r2 до ПП2:

Измеренные разности преобразуют в цифровые сигналы. Сигнал ΔS02 передают из ПП2 по узкополосной линии связи в ПП1 и вычитают его из сигнала ΔS01:

Как видно из (3), (4) и (5), за счет операции (5) устраняют влияние ионосферы на пути DF+FC распространения ЗС от ЗГ РЛС до цели.
При этом следует подчеркнуть, что когерентную корреляционно-фильтровую обработку сигналов производят непосредственно на позициях. Поэтому устраняются недостатки аналогов, то есть исключается необходимость реализации широкополосных линий связи между позициями и синхронизации приемных пунктов по частоте и фазе принимаемых сигналов.
Однако из (5) следует, что влияние ионосферы не устранено на путях распространения зондирующих сигналов от ЗГ РЛС до ПП1 и ПП2, то есть (DF+EA) и (DH+HB). Для устранения этого влияния осуществляют привязку моментов приема зондирующих сигналов в ПП1 и ПП2 к единому времени  например, с помощью контроллеров привязки [5]. Далее вычисляют разность этих времен, умножают на скорость света с и получают разность путей распространения ЗС:
например, с помощью контроллеров привязки [5]. Далее вычисляют разность этих времен, умножают на скорость света с и получают разность путей распространения ЗС:

После этого прибавляют полученное значение к разности путей распространения (5) и получают разность дальностей, в которой устранено влияние ионосферы:

Эту разность дальностей вместе с измеренным азимутом цели β1 используют для вычисления дальность цели по формуле (2).
Достоверность заявленного способа подтвердим для случая, когда ЗГ РЛС находится впереди ДП КПЛ (смотри фиг. 2) при следующих исходных данных.
Дальность по Земле от ПП1 до ЗГ РЛС AD=1100 км, а от ПП2 до ЗГ РЛС BD=1050 км, база Б=350 км. Значения углов при базе находятся по теоремам косинусов и синусов:


Координаты цели: х=250 км, у=400 км, r1=471,699 км,
r2=412,311 км, 
 Разность дальностей ΔR=59,388 км, разность углов
Разность дальностей ΔR=59,388 км, разность углов 
Дальность по Земле CD от цели до ЗГ РЛС вычисляется по теореме косинусов:

Пусть ЗС отражается от слоя F ионосферы на высотах 225 км, 200 км и 250 км. Длина путей распространения зондирующего сигнала приведена в табл. 1.
В соответствии с (3) и (4) измеренные в ПП1 и ПП2 разности путей распространения сигналов будут равны:



Разность этих измерений (ΔS01-ΔS02=33,5 км) будет на 25,6 км меньше истинной разности дальностей (ΔR=59,388 км). Поэтому дальность r1 будет определяться по выражению (2) с отрицательным смещением, равным 72,4 км:

Разность путей распространения ЗС в соответствии с (6) равна:

Такое же значение получим по результатам разности измерений моментов приема ЗС:

Прибавив к этому значению ΔS01-ΔS02, получим истинную разность дальностей, при которой дальности определяется практически без смещения:


Для анализа точности ДП КПЛ вычислим среднеквадратическую ошибку (СКО) определения дальности r1 по формуле:

где σβ=1° - СКО измерения азимута в ПП1;
σΔR=3 км - СКО измерения разности дальностей в ПП1 и ПП2.
В качестве примера в таблице 2 приведены СКО определения дальности в зоне обзора ДП КПЛ при удалении цели на 100 км относительно базы, равной также 100 км.
Как видно из табл. 2, СКО определения дальности в полосе разведки ДП КПЛ, равной базе, не превышают 5% от значения дальности. Доминирующее влияние оказывают ошибки определения разности дальности.
Аналогичные закономерности проявляются, если ДП КПЛ находится впереди ЗГ РЛС (смотри фиг. 1).
Возможность осуществления изобретения подтверждается результатами экспериментов по обнаружению самолета в однопозиционном пассивном комплексе, удаленном от австралийской ЗГ РЛС на 1850 километров [1, С. 649-652, С. 719].
Таким образом, за счет учета влияния ионосферы на разность путей распространения зондирующих сигналов, измерения разностей путей распространения зондирующих сигналов и отраженных от цели сигналов непосредственно в приемных позициях достигается заявленный технический результат: устранены или уменьшены систематические ошибки определения дальности цели за счет учета влияния ионосферы на распространение зондирующих сигналов ЗГ РЛС и отраженных от цели сигналов; упрощен КПЛ за счет применения узкополосных линий связи между позициями; реализуется возможность использования для подсвета цели как отечественных ЗГ РЛС, так и зарубежных ЗГ РЛС, находящихся за пределами страны.
Список использованных источников
1. Фабрицио Джузеппе А. Высокочастотный загоризонтный радар: основополагающие принципы, обработка сигналов и практическое применение. - М.: ТЕХНОСФЕРА, 2018. - 936 с.
2. Радиолокационный способ обнаружения и определения параметров движения маловысотных малозаметных объектов в декаметровом диапазоне радиоволн. Патент на изобретение №2669702 от 18.04.2016.
3. Оценивание дальности и скорости в радиолокационных системах. Ч. 3 / Под ред. B.C. Вербы и В.И. Меркулова - М.: Радиотехника, 2010. - 468 с.
4. Радиолокационные системы. / Под ред. В.П. Бердышева - Красноярск: 1976-376 с.
5. В. Румянцев, О. Сиверский, В. Соколовский, А. Яковлев. Контроллеры привязки измеряемых параметров к единому времени. // Разработки / Космонавтика. СТА. 3, 2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| РАЗНЕСЕННЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ ПЕЛЕНГАТОР | 2008 |
|
RU2382378C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| СПОСОБ ПОЛУАКТИВНО-ПАССИВНОГО БИСТАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛИ | 2020 |
|
RU2751999C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ НОСИТЕЛЯ ОБЗОРНОЙ РЛС | 2007 |
|
RU2390038C2 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ И МАЛОРАЗМЕРНЫХ БПЛА | 2021 |
|
RU2795472C2 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |

Изобретение относится к радиолокации и может быть использовано в двухпозиционном комплексе пассивной локации для определения дальности воздушных и надводных целей, которые облучаются зондирующими сигналами ионосферной загоризонтной РЛС. Техническим результатом изобретения является повышение точности определения дальности цели за счет учета влияния ионосферы на распространение радиолокационных сигналов. Указанный результат достигается за счет измерения в первой приемной позиции ПП1 азимута цели β1, а в обеих приемных позициях разностей путей распространения через ионосферу и поверхностной электромагнитной волной отраженных от цели сигналов ΔS01 и ΔS02, моментов приема зондирующих сигналов  вычисление разности дальностей до цели
вычисление разности дальностей до цели  где с - скорость света, и использование этой разности для вычисления в ПП1 дальности до цели по формуле:
где с - скорость света, и использование этой разности для вычисления в ПП1 дальности до цели по формуле:  2 ил., 2 табл.
2 ил., 2 табл.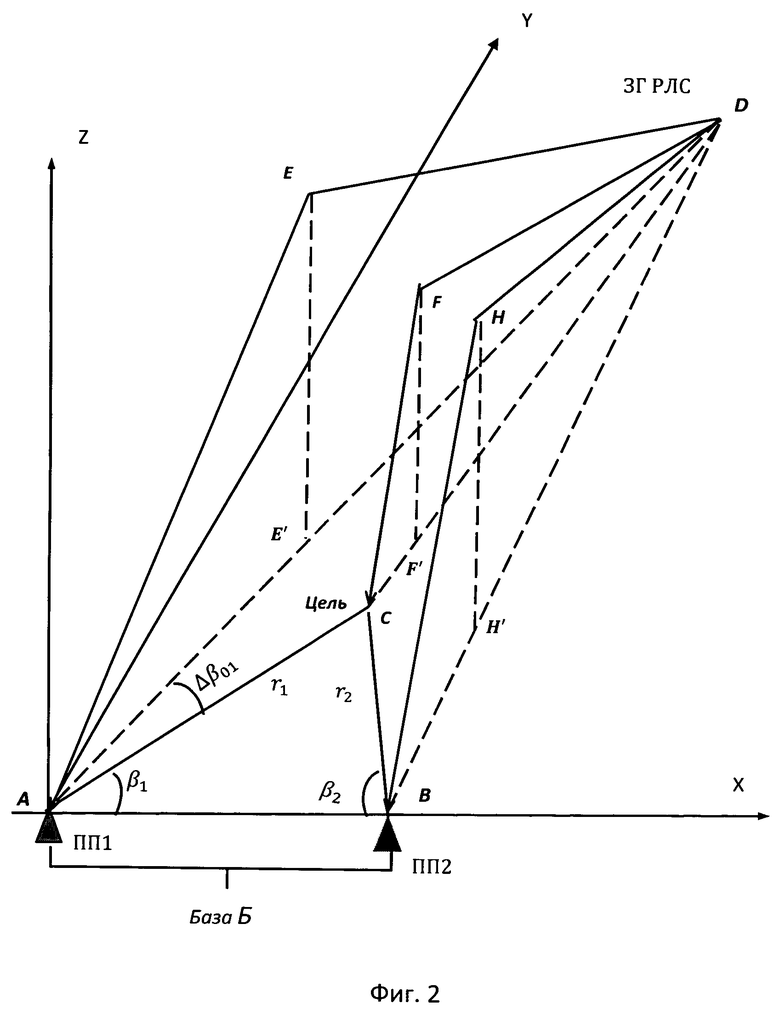
Способ определения дальности цели в двухпозиционном комплексе пассивной локации (ДП КПЛ) с использованием зондирующих сигналов ионосферной загоризонтной РЛС (ЗГ РЛС), включающий прием в двух приемных позициях ДП КПЛ, разнесенных на местности на расстояние, называемое базой Б, отраженных сигналов от цели, подсвеченной зондирующими сигналами (ЗС) ЗГ РЛС, измерение азимута цели β1 относительно линии базы в первой приемной позиции ПП1, находящейся в начале местной системы координат ДП КПЛ, передачу принятых во второй приемной позиции ПП2 сигналов в первую приемную позицию ПП1, измерение разности дальностей до цели ∆R и вычисление дальности от ПП1 до цели по формуле  отличающийся тем, что в приемных позициях ПП1 и ПП2 принимают зондирующие сигналы ЗГ РЛС, которые используют в качестве опорных сигналов в устройствах корреляционно - базовой обработки радиолокационных сигналов в ПП1 и ПП2 для обнаружения сигнала цели, в ПП1 измеряют разность ΔS01 между путем распространения ЗС через ионосферу от передающей позиции ЗГ РЛС до ПП1 и путем распространения ЗС через ионосферу от передающей позиции ЗГ РЛС до цели, далее путем распространения сигнала поверхностной волной, равным дальности цели до ПП1, в ПП2 измеряют разность ΔS02 между путем распространения ЗС через ионосферу от передающей позиции ЗГ РЛС до ПП2 и путем распространения ЗС через ионосферу от передающей позиции ЗГ РЛС до цели, далее путем распространения сигнала поверхностной волной, равным дальности цели r2 до ПП2, измеренные разности преобразуют в цифровые сигналы, сигнал ΔS02 передают из ПП2 по узкополосной линии связи в ПП1 и вычитают его из сигнала ΔS01, осуществляют привязку моментов приема зондирующих сигналов в ПП1 и ПП2 к единому времени
отличающийся тем, что в приемных позициях ПП1 и ПП2 принимают зондирующие сигналы ЗГ РЛС, которые используют в качестве опорных сигналов в устройствах корреляционно - базовой обработки радиолокационных сигналов в ПП1 и ПП2 для обнаружения сигнала цели, в ПП1 измеряют разность ΔS01 между путем распространения ЗС через ионосферу от передающей позиции ЗГ РЛС до ПП1 и путем распространения ЗС через ионосферу от передающей позиции ЗГ РЛС до цели, далее путем распространения сигнала поверхностной волной, равным дальности цели до ПП1, в ПП2 измеряют разность ΔS02 между путем распространения ЗС через ионосферу от передающей позиции ЗГ РЛС до ПП2 и путем распространения ЗС через ионосферу от передающей позиции ЗГ РЛС до цели, далее путем распространения сигнала поверхностной волной, равным дальности цели r2 до ПП2, измеренные разности преобразуют в цифровые сигналы, сигнал ΔS02 передают из ПП2 по узкополосной линии связи в ПП1 и вычитают его из сигнала ΔS01, осуществляют привязку моментов приема зондирующих сигналов в ПП1 и ПП2 к единому времени  значение
значение  в виде цифрового сигнала передают по узкополосной линии связи в ПП1, где вычисляют разность
в виде цифрового сигнала передают по узкополосной линии связи в ПП1, где вычисляют разность  и умножают ее на скорость света с, вычисляют разность дальностей до цели ΔR, в которой устранено влияние ионосферы, по формуле
и умножают ее на скорость света с, вычисляют разность дальностей до цели ΔR, в которой устранено влияние ионосферы, по формуле 
| Радиолокационный способ обнаружения и определения параметров движения маловысотных малозаметных объектов в декаметровом диапазоне радиоволн | 2016 |
|
RU2669702C2 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| ТЕРКА ДЛЯ СВЕКЛЫ | 1933 |
|
SU38509A1 |
| Способ определения направления и дальности до источника сигналов | 2016 |
|
RU2620925C1 |
| АЛЕШКИН А.П., АРТЮШКИН А.Б., ДУНИКОВ А.С., НИКИФОРОВ С.В | |||
| Алгоритм обнаружения и определения координат объекта с использованием двулучевого метода загоризонтной радиолокации // Системы управления, связи и безопасности, 2017 г., N 1, сс | |||

