Изобретение относится к сельскохозяйственному приборостроению и может использоваться при автоматизации вождения самоходных сельскохозяйственных машин и машинно-тракторных агрегатов (МТА).
Известны электроиндукционные разностно-амплитудные системы местоопределения МТА, состоящие из 2-х комплектов оборудования: а) стационарного или мобильного навигационного индуктора, и б) мобильного датчика местоположения МТА [Л1: Основы сельскохозяйственной навигации: учебное пособие /А.Т. Калюжный. – С-Петербург: Лань, 2023, стр. 128-155].
Стационарный индуктор состоит из одного или нескольких подземных или наземных токонесущих проводов, уложенных вдоль всей траектории движения МТА, и источника переменного тока питания проводов. [Л1, стр.151, рис.10.34]. Токи проводов создают в окружающем пространстве навигационные магнитные поля, интенсивность которых характеризуется напряженностью и зависит от расстояния до проводов.
Мобильный комплект является датчиком сигнала местонахождения МТА. Он состоит из двух магнитных антенн, которые преобразуют напряженность навигационного магнитного поля в электрические напряжения [Л1, с.131, рис.10.4.], и схемы сравнения выходных напряжений антенн [Л1, с.140, рис. 10.12]. Антенны выполнены в виде соединенных параллельно катушки и конденсатора [Л1, с.137, рис.10.8], образующих высокодобротный резонансный контур, резонансная частота которых совпадает с частотой навигационного магнитного поля. Такая система местоопределения самоходных машин является прототипом.
Нормально обе антенны равноудалены от провода, их резонансные частоты и выходные напряжения одинаковые, поэтому на выходе схемы сравнения разностного напряжения нет. Однако в процессе эксплуатации вследствие изменения температуры, старения и других причин резонансные частоты антенн взаимно изменяются, в результате чего изменяются их напряжения и разность этих напряжений. Что является недостатком прототипа.
Задачей заявленного изобретения является повышение точности местоопределения МТА посредством снижения указанной погрешности.
Поставленная задача решается тем, что в электроиндукционной системе местоопределения самоходных машин источник переменного тока питания проводов выполнен с качающейся частотой, а датчик сигнала местонахождения МТА дополнительно содержит два запоминающих устройства, включенных между антеннами и схемой сравнения.
Например, центральная частота навигационного магнитного поля F1 может составлять, 10 кГц, а фактическая изменяться с частотой F2 = 50 Гц в диапазоне от 9,9 кГц до 10,1 кГц. Если фактические значения резонансных частот магнитных антенн не выходят за пределы этого диапазона, их выходные напряжения будет принимать одинаковые максимальные значения с частотой F2. Эти значения запоминаются запоминающими устройствами и поступают на входы схемы сравнения, выходное напряжение которой сохраняет нулевое значение независимо от разбаланса резонансных частот антенн.
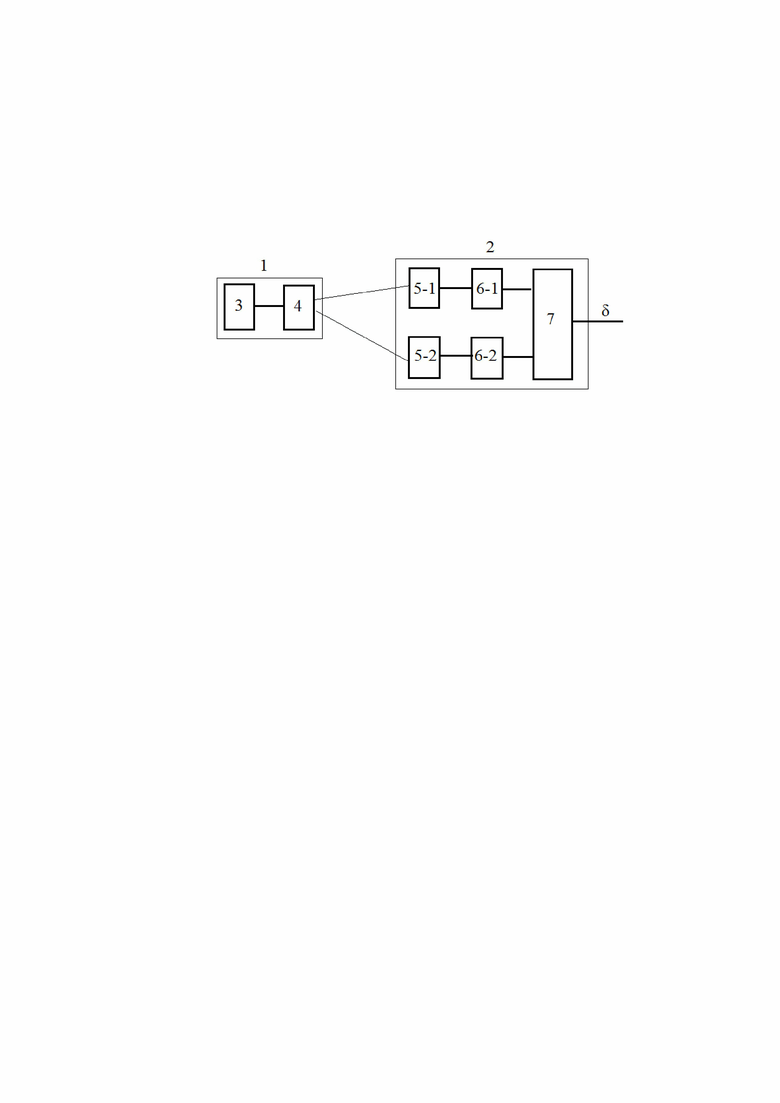
На чертеже приведена структурная схема электроиндукционной системы местоопределения МТА, на которой обозначено:
1 - навигационный индуктор,
2 - датчик сигнала δ местонахождения МТА,
3 - источник переменного тока качающейся частоты,
4 - токонесущий(е) провод(а),
5 - магнитные антенны,
6 - запоминающие устройства,
7 - схема сравнения напряжений.
Индуктор 1 состоит из источника переменного тока качающейся частоты 3 и одного или нескольких токонесущих проводов 4. Датчик 2 сигнала δ местонахождения МТА состоит из магнитных антенн 5, запоминающих устройств 6 и схемы сравнения напряжений 7.
Между токонесущим проводом 4 и антеннами 5 существует трансформаторная связь, благодаря которой на выходах антенн присутствуют электрические напряжения, пропорциональные силе тока провода и обратно пропорциональные расстоянию до него. При равноудаленности обеих антенн от провода максимальные значения их выходных напряжений одинаковые и на выходе схемы сравнения напряжение отсутствует, что свидетельствует об отсутствии ошибки управления траекторией МТА. При отклонении антенн в ту или другую сторону относительно провода их максимальные выходные напряжения изменятся в противоположные стороны, в результате чего на выходе схемы сравнения появится разностное напряжение, пропорциональное отклонению антенн от провода.
Провода 4 индуктора 1 могут быть наземными, например – в садах и виноградниках. Провод 4 можно свернуть в виде малогабаритной катушки и расположить на ведущем МТА, а датчик 2 – на ведомом МТА при их дублерном вождении. Запоминающие устройства 6 могут быть аналоговыми или цифровыми. В последнем случае они содержат аналого-цифровые преобразователи АЦП.
Реализация изобретения повысит температурную и долговременную стабильность систем местоопределения, повысит точность, упростит и снизит стоимость эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ | 2019 |
|
RU2721921C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ | 2017 |
|
RU2653000C1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ | 2017 |
|
RU2652999C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ ИНДУКТОР | 2017 |
|
RU2649870C1 |
| ИНДУКЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА НАХОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670490C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ | 2016 |
|
RU2624213C1 |
| Способ местоопределения машинно-тракторного агрегата в переменном магнитном поле токонесущего контура | 1985 |
|
SU1358808A1 |
| СПОСОБ СОЗДАНИЯ НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634046C1 |
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
Изобретение относится к электроиндукционной системе местоопределения самоходных машин. Система состоит из стационарного или мобильного навигационного индуктора и датчика сигнала местонахождения, в частности, машинно-тракторных агрегатов (МТА). Навигационный индуктор состоит из одного или нескольких токонесущих проводов и источника переменного тока. Датчик сигнала местонахождения МТА состоит из двух магнитных антенн и схемы сравнения выходных напряжений антенн. Источник переменного тока выполнен в виде источника качающейся частоты. Датчик сигнала местонахождения МТА дополнительно содержит два запоминающих устройства, включенных между выходами антенн и входами схемы сравнения. Достигается повышение точности местоопределения МТА. 1 ил.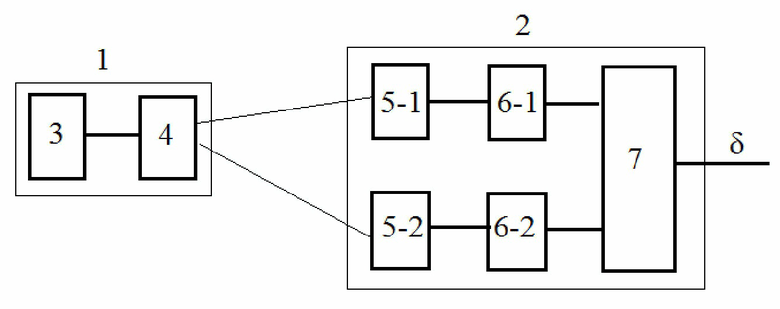
Электроиндукционная система местоопределения самоходных машин, состоящая из стационарного или мобильного навигационного индуктора и датчика сигнала местонахождения, в частности, машинно-тракторных агрегатов (МТА), причем навигационный индуктор состоит из одного или нескольких токонесущих проводов и источника переменного тока, а датчик сигнала местонахождения МТА состоит из двух магнитных антенн и схемы сравнения выходных напряжений антенн, отличающаяся тем, что источник переменного тока выполнен в виде источника качающейся частоты, а датчик сигнала местонахождения МТА дополнительно содержит два запоминающих устройства, включенных между выходами антенн и входами схемы сравнения.
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
| ИНДУКЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА НАХОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670490C1 |
| Генератор качающейся частоты | 1979 |
|
SU849415A1 |
| US 3606933 A, 21.09.1971. | |||

