Изобретение относится к сельскохозяйственному приборостроению и может использоваться для автоматизации вождения самоходных машин и машинно-тракторных агрегатов (МТА).
Индукционный разностно-амплитудный способ определения места нахождения МТА относительно токоведущих проводов по величине первичных навигационных параметров, в качестве которых используют модули вектора напряженности в 2-х точках МТА, проекции вектора напряженности на 2 направления, или модули проекций вектора на 2 направления, известен. (Электронавигация сельскохозяйственная индукционная // А.Т. Калюжный; Новосиб. Гос. Аграр. Ун-т. - Новосибирск: ИЦ НГАУ «Золотой колос, 2015, стр. 87-115). По этому способу подземный гоновый провод питают низкочастотным током, который создает в окружающем пространстве переменное магнитное поле. На МТА, на некоторой высоте от земной поверхности, в одной или нескольких точках горизонтальной плоскости измеряют 2 значения первичного навигационного параметра магнитного поля, различающихся местом или направлением измерения. По измеренным значениям формируют разностный сигнал, который используют в качестве сигнала траекторного рассогласования МТА. Данный способ является прототипом.
Недостатком прототипа является низкая помехоустойчивость к магнитным полям, создаваемым токами других проводов. Такими проводами могут быть другие токоведущие гоновые провода, либо провода, замыкающий цепь тока. Так, рабочий провод, относительно которого определяется место нахождения МТА, может быть стороной четырехугольной токовой петли. Тогда этот провод является рабочим, его ток «прямой» и создает полезное магнитное поле, а ток остальных трех сторон петли является «обратным» и создает магнитное поле помех, которое искажает полезное магнитное поле, изменяет измеряемые значения навигационных параметров магнитного поля и разностный сигнал, снижает точность вождения МТА вдоль рабочего провода петли.
Целью изобретения является повышение точности местоопределения тракторных агрегатов относительно подземного токоведущего провода.
Согласно изобретению, для достижения этой цели дополнительно формируют второй разностный сигнал по результатам измерения первичных параметров магнитного поля в точках второй горизонтальной плоскости, расположенной над первой, а сигнал местоположения МТА, т.е. траекторного рассогласования, формируют как разность между значениями первого и второго разностных сигналов.
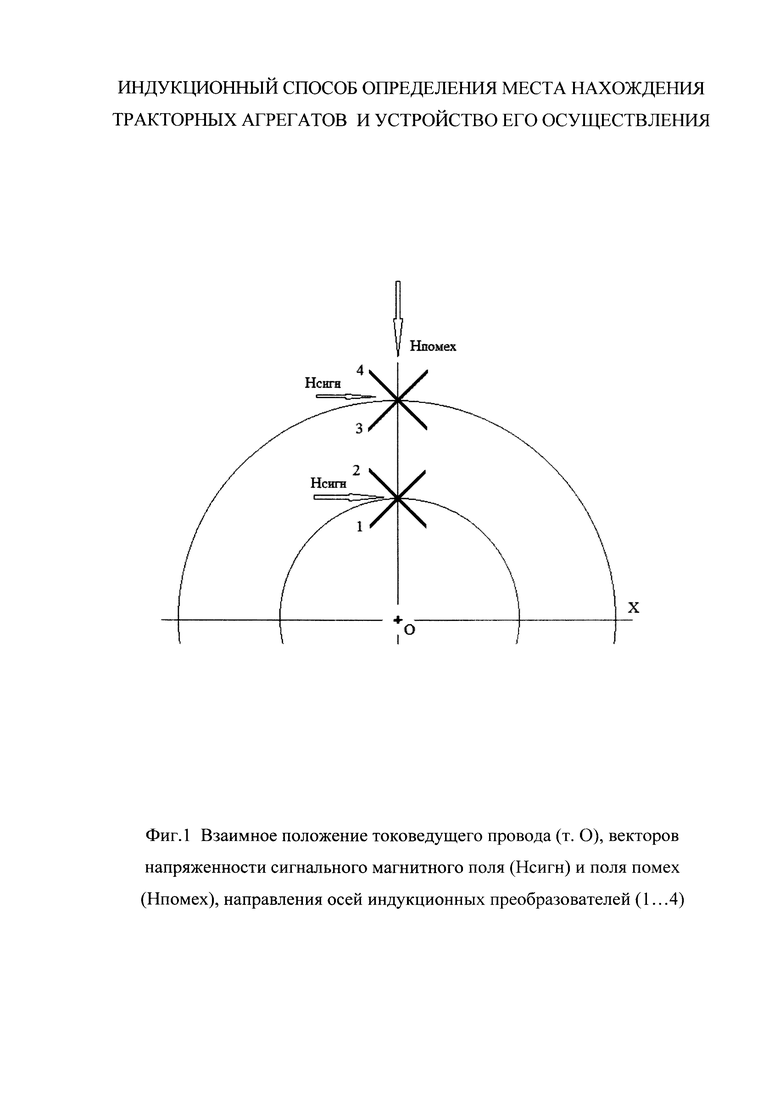
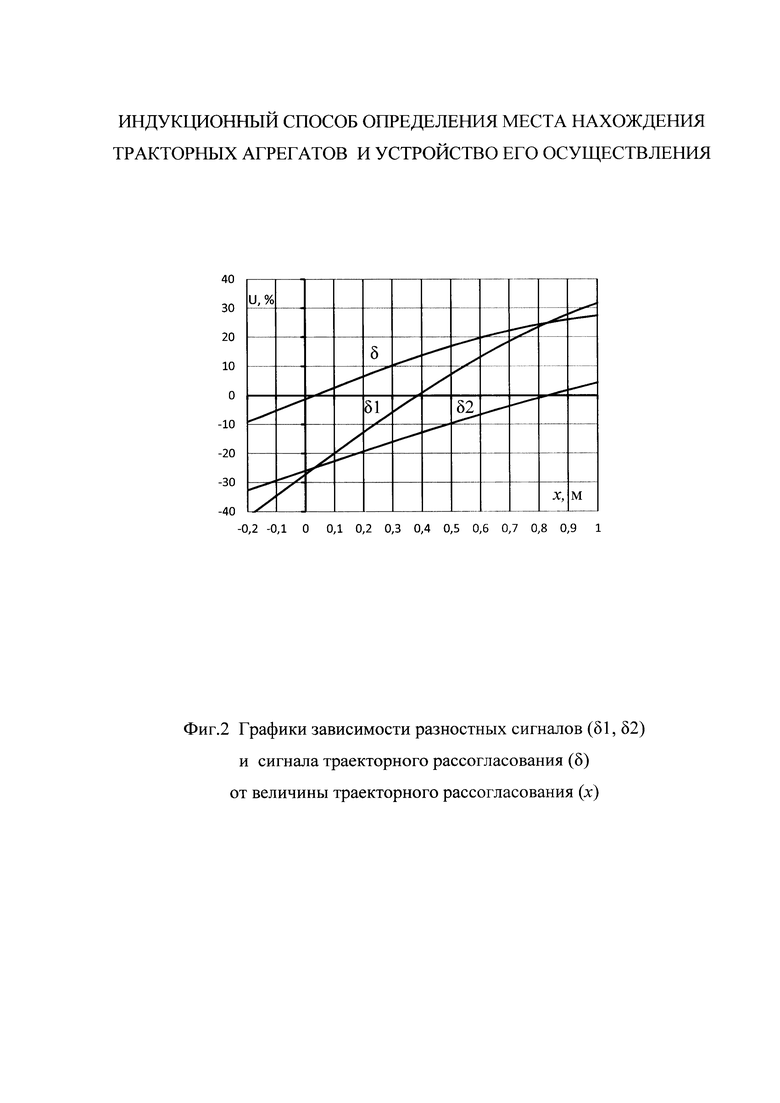
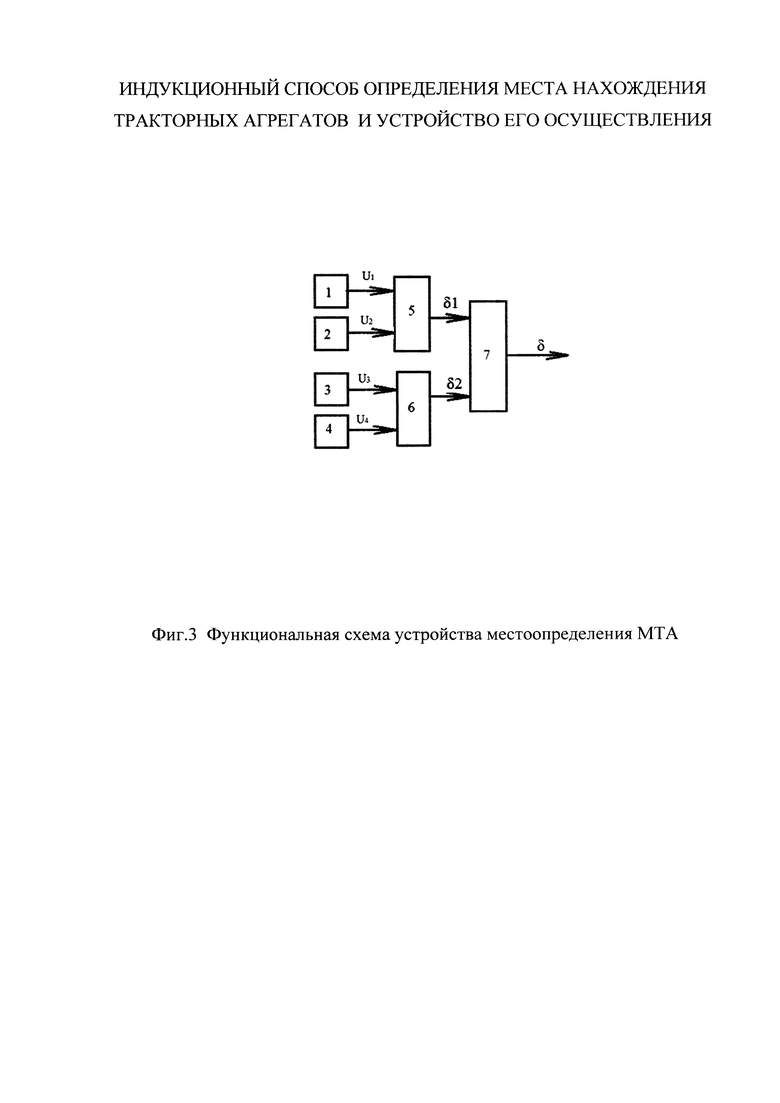
Сущность изобретения поясняется на чертежах. На фигуре 1 показан вариант взаимного расположения токоведущего провода, точек и направлений измерения первичных параметров магнитного поля, направлений векторов напряженности магнитных полей помех и тока провода. На фигуре 2 показаны расчетные графики разностных сигналов и сигнала траекторного рассогласования, полученные по результатам измерений первичных параметров магнитного поля в двух горизонтальных плоскостях, расстояние между которыми 1 метр. На фигуре 3 приведена функциональная схема устройства, реализующего предлагаемый способ.
На фигуре 1 источником магнитного поля является ток, который втекает в чертеж в точке О и обозначен крестиком. Магнитные силовые линии изображены тонкими дугами окружностей, направления осей проекций показаны Х-образными отрезками 1…4, направления векторов напряженности, создаваемых током провода, обозначены стрелками Нсигн, а вектора напряженности помех - Нпомех.
На фигуре 2 обозначено:
δ1 и δ2 - значения разностных сигналов, сформированных по результатам измерений первичных параметров, в качестве которых используются проекции векторов напряженности на оси индукционных преобразователей (ИП), в точках первой и второй горизонтальной плоскости соответственно; δ=δ1-δ2 - сигнал местоположения, или траекторного рассогласования.
На фигуре 3 обозначено:
1 и 2 - ИП первой горизонтальной плоскости;
3 и 4 - ИП второй горизонтальной плоскости;
5 и 6 - формирователи разностных сигналов (схемы вычитания);
7 - формирователь сигнала траекторного рассогласования (схема вычитания).
ИП 1…4 представляют катушки, начала которых на фигуре 1 расположены слева и обозначены цифрами 1…4. Векторы напряженности магнитного поля, создаваемого током провода, входят в катушки в чачало, а вектор магнитных полей помех входит в начало катушек 2 и 4, и в конец катушек 1 и 3. При этом выходные напряжения ИП 2 и 4 пропорциональны сумме напряженностей полей тока провода и помех, а ИП 1 и 3 - их разности. При сравнении выходных напряжений ИП 1 и 2 происходит вычитание составляющих напряжения, создаваемых током провода, и сложение составляющих, создаваемых полем помех. Аналогично с выходными напряжениями ИП 3 и 4.
Расчетные графики на фигуре 2 приведены для длинной петли шириной 10 м. Первичными параметрами магнитного поля являются проекции вектора напряженности на направления, образующие с вертикалью углы ±45°. Направления задаются осями ИП 1 и 2 в нижней горизонтальной плоскости, и осями ИП 3 и 4 в верхней плоскости. При расчетах принято, что нижняя плоскость удалена от плоскости петли на 2 м, а верхняя на 3 м.
График δ1 показывает зависимость разности выходных напряжений ИП 1 и 2 от траекторного рассогласования х:
δ1=U1-U2,
а график δ2 - зависимость разности напряжений ИП 3 и 4:
δ2=U3-U4,
где U1…U4 - выходные напряжения соответствующих ИП в процентах к максимальному значению.
Графики показывают, что сигнал δ1=0 при х=0,38 м, поэтому при его использовании в качестве сигнала траекторного рассогласования ошибка траекторного управления составит 38 см. Если в качестве сигнала местоположения МТА используется δ2, то ошибка управления траекторией движения МТА возрастет до 84 см. Но если в качестве сигнала траекторного рассогласования используется разность δ=δ1-δ2, то ошибка уменьшится до 4 см, которую можно снизить до нуля, увеличив δ2 на 5%.
Таким образом, так как вследствие удаленности источников помех напряженность магнитного поля помех в месте измерения первичных параметров магнитного поля изменяется незначительно, а напряженность магнитного поля тока провода - существенно, то управление траекторией движения МТА по разности двух сигналов, сформированных на разной высоте, позволяет взаимно компенсировать помехи в составе этих сигналов.
Функциональная схема устройства на фигуре 3 состоит из ИП 1…4, формирователей 5 и 6 разностных сигналов δ1 и δ2, формирователя сигнала траекторного рассогласования 7. ИП 1 и 2 расположены в нижней горизонтальной плоскости, а 3 и 4 в верхней. Формирование разностных сигналов заключается в сравнении выходных напряжений ИП 1 и 2, 3 и 4.
Выходные напряжения ИП равны сумме двух составляющих, создаваемых магнитными полями тока провода и помех. Если ИП расположены точно над проводом, то составляющие тока провода U1=U2, U3=U4 и при вычитании формирователями 5 и 6 взаимно компенсируются. Составляющие помех противофазные, так как создаются магнитным полем помех, проникающим в четные ИП в начало, а в нечетные - в конец катушек ИП. Поэтому при вычитании формирователями 5 и 6 их значения суммируются и поступают на входы формирователя 7. Но так как напряжения помех слабо зависят от расстояния между горизонтальными плоскостями, то при расположении ИП над проводом δ≈0.
При смещении ИП относительно провода (x≠0) изменятся составляющие напряжений, создаваемые полем тока провода, а сигналы помех изменятся незначительно. Поскольку ИП 1 и 2 расположены ближе к проводу, чем ИП 3 и 4, то δ1>δ2. После их вычитания формирователем 7 на его выходе появится сигнал траекторного рассогласования δ, величина которого практически не зависит от магнитных помех, создаваемых токами удаленных проводов.
Функциональная схема на фигуре 3 описывает алгоритм местоопределения МТА предлагаемым способом и может быть реализована аналоговыми или цифровыми устройствами. В простейшем случае такое устройство может состоять только из 4-х последовательно включенных индукционных преобразователей 1…4, суммарное напряжение которых при согласно-встречном включении пропорционально траекторному рассогласованию:
UΣ=(U1-U2)-(U3+U4)=U1-U2-U3+U4.
При этом знак рассогласования определяется дополнительно по фазе суммарного напряжения с помощью фазочувствительного выпрямителя, а схемы сравнения 5, 6 и 7 физически отсутствуют.
Сравнения напряжений могут выполняться на постоянном или переменном токе; в первом случае первичным параметром может быть модуль вектора или проекция вектора на заданное направление, а во втором случае - только проекция вектора напряженности на заданное направление.
Угол между осями ИП 1 и 2, 3 и 4 может достигать 180 градусов. В этом случае каждая пара ИП может быть заменена одним ИП с удвоенным коэффициентом передачи, а устройство может состоять из этих двух ИП, расположенных с некоторой разницей по высоте и включенных последовательно-встречно. Дальнейшая обработка сигнала траекторного рассогласования может предусматривать его усиление, выпрямление, определение знака рассогласования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| СПОСОБ СОЗДАНИЯ НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634046C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ | 2017 |
|
RU2653000C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ | 2017 |
|
RU2652999C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ | 2016 |
|
RU2624213C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ | 2019 |
|
RU2721921C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ ИНДУКТОР | 2017 |
|
RU2649870C1 |
| Способ местоопределения машинно-тракторного агрегата в переменном магнитном поле токонесущего контура | 1985 |
|
SU1358808A1 |
| Способ дублерного вождения машинно-тракторных агрегатов | 1985 |
|
SU1382417A1 |
| Электроиндукционная система местоопределения самоходных машин | 2024 |
|
RU2831279C1 |
Изобретение относится к области сельскохозяйственного машиностроения. Индукционный разностно-амплитудный способ и устройство определения места нахождения тракторных агрегатов при движении над токоведущим проводом осуществляются посредством того, что напряженность магнитного поля измеряют в двух горизонтальных плоскостях с помощью двух и более индукционных преобразователей, расположенных на разной высоте на тракторном агрегате. По измеренным значениям с помощью двух формирователей разностных сигналов и схемы сравнения формируют два разностных сигнала. Далее сигнал траекторного рассогласования формируют как разность упомянутых разностных сигналов, для чего входы формирователей разностных сигналов соединены с выходами индукционных преобразователей, а выходы формирователей соединены с входами схемы сравнения. Обеспечивается повышение точности местоопределения тракторных агрегатов. 2 н.п. ф-лы, 3 ил.
1. Индукционный способ определения места нахождения тракторных агрегатов относительно токоведущего провода, согласно которому на тракторном агрегате в одной или нескольких точках первой горизонтальной плоскости измеряют значения двух первичных параметров магнитного поля, по измеренным значениям формируют первый разностный сигнал, который используют для формирования сигнала траекторного рассогласования, отличающийся тем, что дополнительно формируют второй разностный сигнал по результатам измерения первичных параметров напряженности магнитного поля во второй горизонтальной плоскости, располагаемой над первой, а сигнал траекторного рассогласования формируют как разность между первым и вторым разностными сигналами.
2. Индукционное устройство определения места нахождения тракторных агрегатов, реализующее способ по п. 1, отличающееся тем, что содержит два и более индукционных преобразователя, расположенных в двух горизонтальных плоскостях на разной высоте, два формирователя разностных сигналов и схему сравнения разностных сигналов, причем входы формирователей разностных сигналов соединены с выходами индукционных преобразователей, а выходы формирователей соединены с входами схемы сравнения.
| US 3468391 A, 23.09.1969 | |||
| US 3606933 A, 21.09.1971 | |||
| US 6679338 B1, 20.01.2004 | |||
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |

