1
Изобретение относится к приборостроению и может найти применение при создании систем автоматического контроля и управления подвижными объектами в индукционном поле токо- несугцего проводника. Наибольшее применение оно может найти для автоматического управления горными самоходными машиными.
Цель изобретения - повышение точ- ности оприентации самоходной машины за счет исключения влияния флуктуации тока в ток;онесу1цем проводнике.
На чертеже представлена блок-схема устройства, реализующего данный способ.
Сущность способа заключается в следующем.
Создают двухуровневое индукционное поле путем периодического измен НИН тока в токонесущем проводнике, измеряют и запоминают величины напр женностей полей каждого уровня в токе расположения машины. Напряженнос
поля в точке на расстоянии г оТ проводника определяется как
Н (cos cosd, где I ток в проводнике; ci. и d.- углы, под которыми виден проводник из точки измерения. Тогда от каждого уровня поля напряженность в этой же точке будет равна:
1 AJF;:- (cosoi, - coscAg);
Н (cosot, - cosol,) , a их
разность &Н Hj k д I
y cosot, - coBotj,), где k ;
Q I, - li - постоянные.
Из последней формулы видно, что АН зависит только от расстояния, ее-45 ли разность токов определена заранее. Таким образом, измеряя разность уровней напряженноетей поля,.которые создаются токами с заданной разностью в ориентирующей линии, можцо одноз- 50 начно судить о расстоянии между ориентирующей линией и точкой измерения. Сравнивают полученное значение с заданным и по результатам сравнения изменяют положение машины. 55
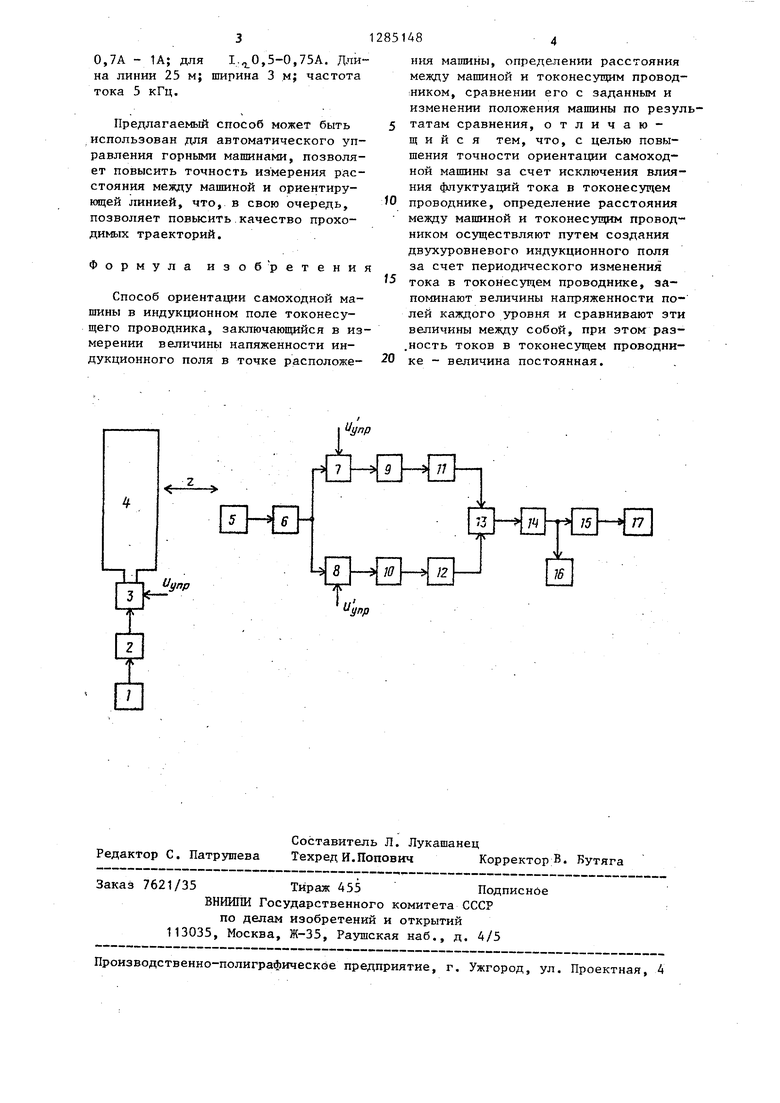
Способ реализуется устройством (фиг; 1), которое содержит генератор 1,, коммутатор 2, усилитель 3, ориентирующую линию 4 (токонесущий
0
5
0
5
0
5
0
5 0 55
1482
проводник), индукционный датчик 5, усилитель 6, аналоговые ключи 7 и 8, детекторы 9 и 10, блоки 11 и 12 памяти, блок 13 сравнения, блок 14 . масштабирования, блок 15 управления, блок 16 индикации, исполнительные органы 17.
Генератор 1 (фиг. 1) вырабатьшает синусоидальное напряжение постоянной частоты, которое поступает на первый вход коммутатора 2, на второй вход которого поступает сигнал управления и.,р, с помощью которого обеспечивается нормальная его работа, т.е. осу1цествляется подача в ориентирующую линию 4 через усилитель 3 токов с заданной разностью в требуемые промежутки времени. В состав коммутатора 2 входят схемы вычитания и стабилизации заданной разности токов. Индукционный датчик 5 воспринимает магнитную составляющую поля, наводимого ориентируюр(ей линией (фиг. 2 а), в которой разность уровней зависит -от измеряемого расстояния. Сигнал с датчика 5 усиливается усилителем 6, выход которого подклю- |чен к входам аналоговьк ключей 7 и 8, посредством которых осуществляется разделение уровней, а их работой . управляет сигнал , такой же как и для коммутатора 2 (фиг. 26).
Далее разделенные уровни детектируются детекторами 9 и 10 и запоминаются в блоках 11 и 12 памяти, выходы которых подключены к входам блока 13 сравнения, на выходе которого формируется разностный сигнал, величина которого пропорциональна измеряемому расстоянию. Этот сигнал через масштабирующий блок 14 пода- ;ется на блок 15 управления, который воздействует на исполнительный ор- ганы 17, возвращая, если это требуется, машину на заданную трассу. Одновременно для визуального наблюдения сигнал со схемы сравнения (поступает на блок 16 индикации.
Предлагаемый способ позволяет измерять расстояние между машиной и ориентирующей линией, причем результат измерения не зависит от величины тока в ориентирующей линии. Б качестве сигнала управления используют промьшшенную- сеть с частотой 50 Гц. Разность токов в линии &I 1, - Ig равная 0,2А; 0,25А; О,ЗА; 0,4А. Б абсолютных значениях величины токов принимались для 1.31285148
0,7А - 1А; для 1.0,5-0,75А. Длина линии 25 м; ширина 3м; частота тока 5 кГц.
ме ли из
Предлагаемый способ может быть использован для автоматического управления горными машинами, позволяет повысить точность измерения расстояния между машиной и ориентирующей линией, что, в свою очередь, позволяет повьюить.качество проходимых траекторий.
Формула изобретения
Способ ориентации самоходной машины в индукционном поле токонесущего проводника, заключающийся в измерении величины напяженности индукционного поля в точке расположеРедактор С. Патрушева
Составитель Л. Лукашанец
Техред И.Попович Корректор В. Бутяга
Заказ 7621/35Тираж 455Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическсэе предприятие, г, Ужгород, ул. Проектная, 4
между машиной и токонесущим провод- ликом, сравнении его с заданным и изменении положения машины по результатам сравнения, отличающийся тем, что, с целью повышения точности ориентации самоходной машины за счет исключения влияния флуктуации тока в токонесущем
проводнике, определение расстояния между машиной и токонесущим проводником осуществляют путем создания двухуровневого индукционного поля за счет периодического изменения
тока в токонесущем проводнике, запоминают величины напряженности полей каждого уровня и сравнивают зти величины между собой, при этом раз- .ность токов в токонесзтцем проводни-
ке - величина постоянная.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1982 |
|
SU1017180A1 |
| Устройство контроля параллельности проходимых траекторий | 1984 |
|
SU1190031A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1777682A1 |
| Способ ориентации самоходного объекта относительно токонесущего провода | 1987 |
|
SU1493130A1 |
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1139378A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1796087A1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| Способ ориентации самоходной машины в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1087965A1 |
| Способ автоматического контроля положения секции механизированной крепи | 1990 |
|
SU1756556A1 |
Изобретение предназначено для автоматического контроля и управления направленного вождения самоходных транспортных и сельскохозяйсттвенных машин. Цель изобретения - повышение точности ориентации само- (Ходных машин за счет исключения влияния флуктуации в токонесущем проводнике (ТИП). Для этого путем периодического изменения тока в ТНП создают двухуровневое индукционное поле. В точке расположения машины измеряют и запоминают величины напряженности полей каз1ц ого уровня. Сравнивают эти величины между собой. Разность токов в ТНП при этом- величина постоянная. По результату сравнения определяют расстояние между машиной и ТНП. Сравнивают полученное значение с заданным. По результатам сравнения изменяют положение машины, возвращая ее, если это требуется, на заданную трассу. 1 ил. (Л с 1C 00 ел S 00
| Способ ориентации самоходных машин в индукционном поле токонесущего провода | 1978 |
|
SU695600A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чувствительный элемент для систем автоматического направления движения самоходных машин по эквидистантным линиям относительно токонесущего провода | 1973 |
|
SU454000A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
