Изобретение относится к автоматизации вождения сельскохозяйственных машинно-тракторных агрегатов (МТА) и может найти применение при создании автоматических тракторов-роботов.
Автоматизация мобильных процессов растениеводства на уровне, обеспечивающем выполнение полевых работ без человека на тракторе, требует прежде всего автоматизации управления траекторией движения трактора, поэтому и требуется определять его местоопределение в поле с погрешностью не более сотых долей метра. Одним из перспективных направлений для решения этой проблемы является использование магнитной индукции.
Известен индукционный амплитудно-компенсационный способ определения места нахождения тракторных агрегатов относительно эквидистантных линий удаленного токоведущего провода (Гельфенбей С.П. Терранавигация. - М.: Колос, 1981, стр. 102-103), согласно которому сигнал траекторного рассогласования формируется по величине отклонения измеренного значения напряженности от некоторого постоянного значения.
Недостатком существующего способа является несовпадение эквидистантных линий с требуемой траекторией движения МТА, что приводит к нарушению слитности смежных проходов МТА.
Известно также устройство для местоопределения тракторных агрегатов (а.с. СССР №312560 «Чувствительный элемент для систем автоматического направления движения самоходных машин по эквидистантным линиям относительно токонесущего провода»), содержащее индукционный датчик, сигнальный усилитель, усилитель с автоматической регулировкой компенсационного напряжения, схему сравнения выходных напряжений сигнального усилителя и усилителя компенсационного напряжения, формирующую сигнал траекторного рассогласования.
Недостатком известного устройства является низкая точность. Так как сигнальное и компенсационное напряжения сохраняются постоянными по всей длине гона, то в действительности вождение тракторных агрегатов осуществляется по равносигнальным линиям (РСЛ) магнитного поля, которые не параллельны проводу. В частности, вблизи края провода расстояние между проводом и РСЛ снижается в два раза по сравнению с расстоянием вдали от края длинного провода (А. Калюжный. Анализ дальномерных методов индукционной сельхознавигации//Электронный ресурс: http://sjs.tpu.ru/journal/article/view/755. Вестник науки Сибири, №3 (9), 2013, стр. 119, табл. 3).
Известен также способ (а.с. СССР №751343) и устройство (а.с. СССР №791282) определения местоположения МТА относительно удаленного токонесущего провода, согласно которым компенсационное напряжение формируют посредством его запоминания во время предыдущего прохода по смежной траектории. Эти способ и устройство являются прототипами предлагаемого изобретения.
Недостатком прототипов является зависимость компенсационного напряжения от траектории предыдущего прохода, что вызывает постепенное накопление ошибок траекторного управления и недопустимое искривление траектории.
Технической задачей изобретения является повышение точности автоматического вождения МТА по требуемой траектории в переменном магнитном поле удаленного токонесущего проводника.
Согласно изобретению эта цель достигается определением величины компенсационного сигнала в требуемом месте нахождения тракторного агрегата.
Напряженность магнитного поля в любой точке можно определить с высокой степенью точности по известным размерам источника магнитного поля, току и координатам точки, в которой агрегат находится или должен находиться. Расчетная формула учитывает конечные размеры источника магнитного поля, поэтому вычисленное значение компенсационного сигнала зависит только от координат точки вычисления и не зависит ни от расстояния до конца участка (поворотной полосы), ни от траектории предыдущего прохода.
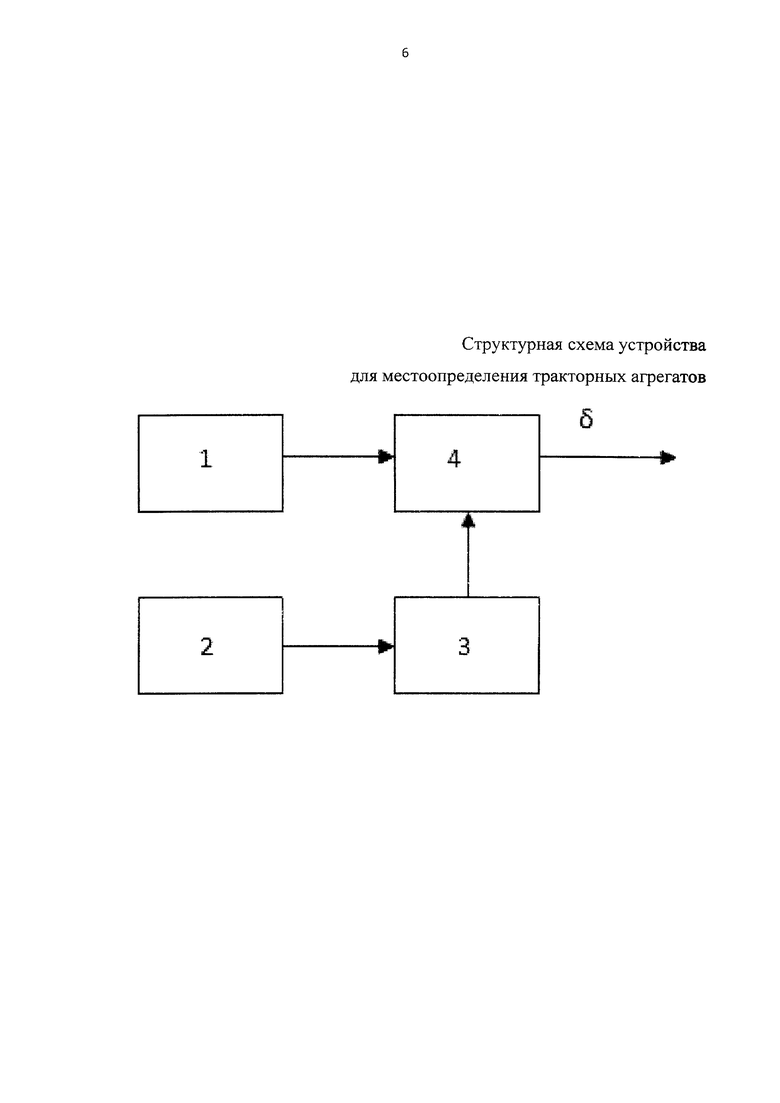
Предлагаемый способ может быть реализован устройством, структурная схема которого представлена на фигуре, где: 1 - индукционный преобразователь напряженности магнитного поля в сигнальное напряжение, 2 - датчик пути, 3 - вычислитель компенсационного напряжения, 4 - схема сравнения компенсационного и сигнального напряжений.
Устройство работает следующим образом.
Предварительно, перед началом работы, в вычислитель 3 вводят исходные данные: параметры источника магнитного поля, ширину захвата тракторного агрегата, способ движения тракторного агрегата по участку (загонный, челночный) и др.
Датчик пути 2 обнуляется в момент входа агрегата в гон и затем выдает в вычислитель значение расстояния от поворотной полосы до места фактического нахождения индукционного преобразователя 1. Вычислитель 3 по этому расстоянию и введенным данным с высокой точностью вычисляет значение напряженности на требуемом удалении от источника магнитного поля. Это значение в виде компенсационного напряжения поступает на один из входов схемы сравнения 4, на второй вход которой поступает сигнальное напряжение преобразователя 1. Разность сравниваемых значений однозначно определяет величину отклонения фактического положения преобразователя 1 от требуемого и поступает на выход устройства как сигнал траекторного рассогласования δ.
Достоинством устройства является независимость сигнала траекторного рассогласования от траектории предыдущего прохода трактора, что исключает наполнение ошибок траекторного управления и повышает слитность смежных проходов МТА.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА НАХОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670490C1 |
| Способ местоопределения машинно-тракторного агрегата в переменном магнитном поле токонесущего контура | 1985 |
|
SU1358808A1 |
| Способ дублерного вождения машинно-тракторных агрегатов | 1985 |
|
SU1382417A1 |
| Электроиндукционная система местоопределения самоходных машин | 2024 |
|
RU2831279C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ ИНДУКТОР | 2017 |
|
RU2649870C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ | 2016 |
|
RU2624213C1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| СПОСОБ СОЗДАНИЯ НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634046C1 |
| ИНДУКТОР СЕЛЬСКОХОЗЯЙСТВЕННЫЙ НАВИГАЦИОННЫЙ | 2017 |
|
RU2652999C1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
Группа изобретений относится к автоматическому управлению трактором для контурной вспашки. Способ местоопределения тракторного агрегата заключается в том, что измеряют величину напряженности магнитного поля, сравнивают измеренное значение с компенсационным и формируют сигнал траекторного рассогласования как разность сравниваемых значений. Значение компенсационного сигнала формируют путем определения напряженности магнитного поля в точке требуемого нахождения тракторного агрегата по параметрам источника магнитного поля и расстояния между тракторным агрегатом и поворотной полосой. Устройство для формирования сигнала траекторного рассогласования содержит индукционный преобразователь, датчик пути, вычислитель и схему сравнения. Датчик пути выдает вычислителю расстояние от поворотной полосы до текущего места нахождения тракторного агрегата. Вычислитель определяет значение напряженности на требуемом удалении от источника магнитного поля. Технический результат заключается в повышении точности автоматического вождения тракторного вождения по требуемой траектории в переменном магнитом поле. 2 н.п. ф-лы, 1 ил.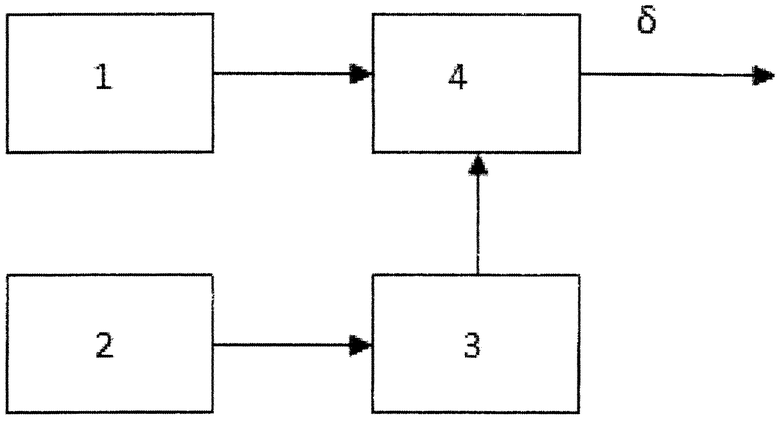
1. Способ местоопределения тракторного агрегата в переменном магнитном поле удаленного источника, согласно которому измеряют величину напряженности магнитного поля, сравнивают измеренное значение с компенсационным и формируют сигнал траекторного рассогласования как разность сравниваемых значений, отличающийся тем, что значение компенсационного сигнала формируют путем определения напряженности магнитного поля в точке требуемого нахождения тракторного агрегата по параметрам источника магнитного поля и расстоянию между тракторным агрегатом и поворотной полосой.
2. Устройство для осуществления способа по п. 1, состоящее из индукционного преобразователя, датчика пути, вычислителя и схемы сравнения, при этом датчик пути выдает в вычислитель расстояние от поворотной полосы до фактического места нахождения индукционного преобразователя, вычислитель определяет значение напряженности на требуемом удалении от источника магнитного поля, это значение поступает на один из входов схемы сравнения, на второй вход которой поступает сигнальное напряжение преобразователя, разность сравниваемых значений определяет величину отклонения фактического положения преобразователя от требуемого.
| Чувствительный элемент системы автоматического управления вождением мобильного агрегата | 1977 |
|
SU791282A1 |
| JP H1056818 A, 03.03.1998 | |||
| Способ программирования траектории движения сельскохозяйственных агрегатов | 1976 |
|
SU751343A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ БЕСКОНТАКТНОГО РАСПОЗНОВАНИЯ ГРАНИЦ ОБРАБОТКИ ИЛИ СООТВЕТСТВУЮЩИХ ЗАДАЮЩИХ ВЕЛИЧИН | 1998 |
|
RU2215389C2 |

