Изобретение относится к электронно-вычислительной технике и может быть использовано в различных системах локации, интенсивного обмена информацией и в многопозиционных пространственно-распределенных системах генерации маркированных сигнально-кодовых конструкций.
Применение М-последовательностей для генерации сигнально-кодовых конструкций обеспечивает преимущества при их использовании в различных систем обнаружения, в частности в связи, локации и навигации в числе которых простой способ генерации канонических М-последовательностей, большая база для генерации элементарных импульсных сигналов, автокорреляционной функции (АКФ) М-последовательности имеет резкий спад в окрестности максимума и равномерный уровень боковых лепестков во всем временном диапазоне, кроме того они хорошо изучены и апробированы.
Известен способ для формирования М-последовательностей (Варакин Л.Е. Системы связи с шумоподобными сигналами. - М.: Радио и связь, 1985. - 384 с., ил. стр. 54). В основе логике последовательности действий данного способа заложены сдвигающие регистры с триггерами, для функционирования которых необходимо знать характеристический полином определенной степени.
Недостатком является, довольно низкий уровень боковых лепестков АКФ канонической бинарной М-последовательности, при этом случайное искажение значений элементов последовательности приводит к росту боковых лепестков АКФ.
Известен «Способ повышения разрешающей способности по дальности радиолокационной станции» (Патент РФ № 2596229, МПК G01S 13/24, опубл. 10.09.2016, Бюл. №25). В способе формируют пачку из N импульсов сигнала на разных несущих частотах и N опорных сигналов в виде ортогональных М-последовательностей, где N - целое число большее либо равное двум, модулируют по фазе каждый импульс опорным сигналом, последовательно когерентно излучают и принимают отраженную пачку из N импульсов сигнала. Далее осуществляют свертку каждого принятого импульса с соответствующим ему опорным сигналом в виде М-последовательности, осуществляют доплеровскую фильтрацию пачки из N импульсов сигнала, формируют N элементов разрешения по дальности.
Недостатком является то, что канонические М-последовательности одинаковой длины, генерируемые полиномами одного порядка, не являются ортогональными, что приводит к обнаружению эхо-сигналов, воздействующих деструктивно двух на друга в совместных радиолокационных каналах бортовых РЛС при многопозиционном режиме работы.
Наиболее близким по технической сущности аналогом, принятым за прототип предлагаемого изобретения, является «Способ формирования и приема сложных сигналов на основе М-последовательностей» (Патент РФ № 2276385, МПК G01S 13/02, опубл. 10.05.2006, Бюл. №13).
В указанном способе излучаемый сигнал манипулируется последовательностью, получаемой в результате сложения по модулю 2 двух исходных последовательностей, сформированных по одному и тому же закону  , k>n, с тактовыми частотами ƒ1 и ƒ2, находящимися в отношении
, k>n, с тактовыми частотами ƒ1 и ƒ2, находящимися в отношении  , где b1, b2, …, bn - одноразрядные двоичные числа, n - число разрядов регистра сдвига, определяющее длину исходных последовательностей N=2n - 1, Р и Θ - взаимно простые числа, а принимаемый сигнал с периодом повторения
, где b1, b2, …, bn - одноразрядные двоичные числа, n - число разрядов регистра сдвига, определяющее длину исходных последовательностей N=2n - 1, Р и Θ - взаимно простые числа, а принимаемый сигнал с периодом повторения  поступает на два коррелятора, на выходе которых формируются значения задержек τ1 и τ2 относительно исходных М-последовательностей и затем вычисляется полное число тактов задержки для тактовой частоты ƒ1
поступает на два коррелятора, на выходе которых формируются значения задержек τ1 и τ2 относительно исходных М-последовательностей и затем вычисляется полное число тактов задержки для тактовой частоты ƒ1

и для тактовой частоты ƒ2

где int(X) - есть целая часть числа X, L = Y mod Z - есть сравнение числа L с числом Y по модулю Z, а Р-1 и Θ-1 - есть величины, обратные Р и Θ по модулю Θ и Р, вычисляемые с использованием математической теории чисел.
Недостатком прототипа является неспособность обеспечить маркирование зондирующих модулированных сигналов с более низким уровнем боковых лепестков апериодической автокорреляционной функции и равномерно распределенным характером лепестков взаимокорреляционной функции (ВКФ) этих последовательностей.
Техническим результатом заявляемого изобретения является обеспечение более низкого уровня боковых лепестков апериодической автокорреляционной функции, чем у аналогичной АКФ канонических М-последовательностей, при этом ВКФ этих последовательностей носит равномерный характер, что обеспечивает выделение модулированных зондирующих сигналов в общем радиолокационном канале при реализации режимов многопозиционных бортовых систем.
Технический результат достигается тем, что в способе формирования М-последовательностей для генерации сигнально-кодовых конструкций, заключающимся в том, что излучаемый сигнал преобразуют последовательностью, получаемой в результате сложения по модулю два двух исходных последовательностей, сформированных по одному и тому же закону, где k>n, отличающийся тем, что число исходных последовательностей может быть от 2 до Q, где Q - это количество генерирующих полиномов, существующих в рамках одного порядка, после чего выбирают требуемое количество Q генерирующих полиномов одного порядка L и соответственно осуществляют их генерацию одной длины N, при этом количество Q связано с количеством позиций излучающих бортовых РЛС в многопозиционной системе, далее значения {1; 0} каждой из Q последовательностей приводят к значениям пары {1; -1} и для этих последовательностей строят нормированные к единице автокорреляционные функции, по которым определяют максимальное по модулю значение боковых лепестков Umax, а в сгенерированных М-последовательностях заменяют их элементы со значением «-1» на «q» и со значением «1» на «р», после чего определяют систему выражений, где описывающие изменения уровней каждого из N лепестков автокорреляционной функции и соответствующей системы Sν взаимокорреляционных функций в зависимости от введенных параметров «р» и «q» в каждую из структур отдельных М-последовательностей, генерируемых различными полиномами одного порядка L, после чего по системе выражений S1 … SQ определяют значения «р» и «q», при которых уровни боковых лепестков нормированной автокорреляционной функции будут наименьшими из возможных уровней, из числа тех, что ниже значения Umax с учетом выражений системы Sν, полученных для взаимокореляционных функций, которая будет иметь равномерный характер при подстановке значения «р» и «q», после чего формируют зондирующий маркированный сигнал, сгенерированный на основе модуляции полученными выше модифицированными М-последовательностями.
Технический результат достигается тем, что предлагаемый способ реализует поиск М-последовательностей за счет введения новых значений для каждой из кодовых структур, генерируемой в рамках группы полиномов одного порядка, что позволяет однозначно при приеме в общем радиолокационном канале идентифицировать модулированные этой новой последовательностью сигналы, при одновременном их излучении с N позиций многопозиционной системы бортовых РЛС, разнесенных в пространстве и объединенных во взаимодействующую группу.
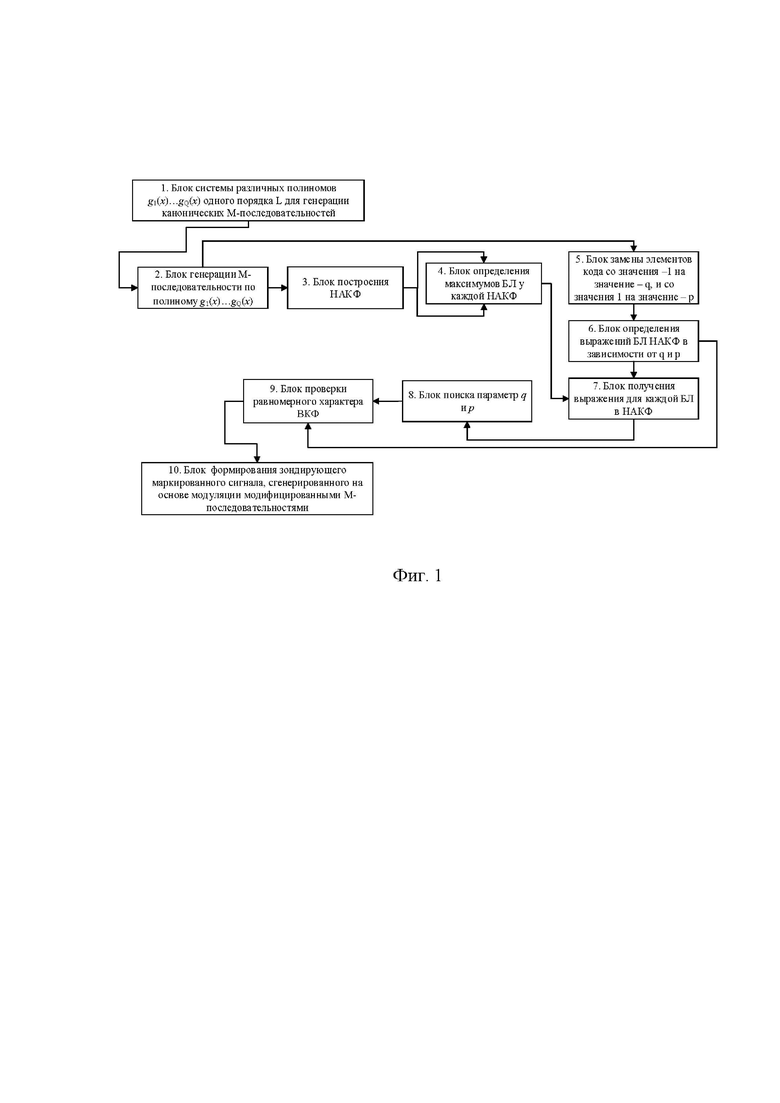
Сущность изобретения поясняется структурной схемой, представленной на фиг. 1.
Заявляемый способ реализуется благодаря следующей последовательности действий:
1) Выбирают Q различных полинома g1(x)…gQ(x) одного порядка L для генерации канонических М-последовательностей имеющих длину N = 2L - 1. При этом количество Q связано с количеством позиций излучающих бортовых РЛС в многопозиционной системе.
• При степени полинома L = 3 и длине последовательности N = 7, следует
g1(x)=х3+х+1, g2(x)=х3+х2+1,
• При степени полинома L = 4 и длине последовательности N = 15,
следует g1(x)=x4+x+1, g2(x)=x4+x3+1;
• При степени полинома L = 5 и длине последовательности N = 31, следует
g1(x)=x5+х2+1, g1(x)=x5+х3+1, g1(x)=x5+х3+х2+x+1, а
g2(x)=x5+х4+х3+х+1, g2(x)=х5+х4+х3+х2+1, g2(x)=x5+х4+х2+х+1;
• При степени полинома L = 6 и длине последовательности N = 63, следует g1(x)=x6+x+1, g1(x)=x6+х4+х3+x+1, g1(x)=x6+х5+1, а
g2(x)=х6+х5+х2+х+1, g2(x)=х6+х5+х3+х2+1, g2(x)=x6+х5+х4+х+1;
• При степени полинома L = 7 и длине последовательности N = 127, следует
g1(x)=х7+х+1, g1(x)=х7+х3+1, g1(x)=х7+х3+х2+х+1, g1(x)=x7+x4+1,
g1(x)=x7+x4+x3+x2+1, g1(x)=x7+x5+x2+x+1, g1(x)=x7+x5+x3+x+1,
g1(x)=x7+x5+x4+x3+1, g1(x)=x7+x5+x4+x3+x2+x+1
g2(x)=x7+x6+1, g2(x)=x7+x6+x3+x+1, g2(x)=x7+x6+x4+x2+1,
g2(x)=x7+x6+x4+x+1, g2(x)=x7+x6+x5+x2+1,
g2(x)=x7+x6+x5+x3+x2+x+1,
g2(x)=x7+x6+x5+x4+1, g2(x)=x7+x6+x5+x4+x2+x+1,
g2(x)=x7+x6+x5+x4+x3+x2+1
• При степени полинома L = 8 и длине последовательности N = 255, следует
g1(х)=x8+х4+х3+х2+1, g1(х)=x8+х5+х3+х+1, g1(х)=x8+х5+х3+х2+1,
gl(х)=x8+х6+х3+х2+1, g1(х)=x8+х6+х5+х+1, gl(х)=x8+х6+х5+х2+1,
g1(х)=x8+х6+х5+х3+1, g1(х)=x8+х6+х5+х4+1
g2(x)=x8+x6+x4+x3+x2+x+1, g2(x)=x8+x6+x5+x+1, g2(x)=x8+x7+x2+x+1,
g2(x)=x8+x7+x3+x2+1, g2(x)=x8+x7+x5+x3+1, g2(x)=x8+x7+x6+x5+x2+x+1,
g2(x)=x8+x7+x6+x5+x4+x2+1, g2(x)=x8+x7+x6+x+1
• При степени полинома L = 9 и длине последовательности N = 511, следует
gl(x)=x9+х4+1, g1(x)=х9+х4+х3+х+1, gl(x)=x9+х5+1, gl(x)=x9+х5+х3+х2+1,
gl(x)=x9+х5+х4+х+1, g1(х)=х9+х6+х4+х3+1, g1(x)=х9+х7+х2+x+1,
g2(х)=х9+х7+х5+х+1, g2(х)=х9+х7+х5+х2+1, g2(х)=х9+х7+х6+х4+1,
g2(x)=x9+x8+х6+х5+х4+х3+х2+х+1, g2(x)=х9+x8+х7+х6+х5+х4+х3+x+1
2) Генерируют Q М-последовательностей по полиномам g1(x)…gQ(x) и привести значения {1; 0} каждой из Q последовательностей к значениям пары {1; -1}.
3) Строят для каждой из М-последовательностей, полученных на шаге 2, нормированную АКФ.
4) Определяют максимальное по модулю значение боковых лепестков Umax каждой нормированной АКФ, полученных на шаге 3.
5) В каждой сгенерированной последовательности на шаге 2 заменяют элементы со значением «-1» на «q» и со значением «1» на «р».
6) Определяют систему S1, … , SQ, где каждый ее элемент S=(R1(р, q),…, RN(p, q)), включает выражения, которые описывают изменения уровней лепестков (главного и боковых) АКФ и соответствующую систему выражений Sν ВКФ в зависимости от введенных параметров «р» и «q».
7) Получают выражения для каждого бокового лепестка для нормированной АКФ, сформировав тем самым соответствующую систему выражений.
8) По выражениям, полученным на шаге 7, определяют значения «р» и «q», при которых уровни боковых лепестков нормированной автокорреляционной функции будут наименьшими из возможных уровней, из числа тех, что ниже значения Umax.
9) Используя выражения системы Sν, полученные для ВКФ на шаге 6, осуществляют проверку, что значения боковых лепестков ВКФ при подстановке, найденных на шаге 8 значений «р» и «q» имеют равномерный характер для каждой новой последовательности из Q.
10) Убеждаются, что значения боковых лепестков АКФ, полученных на шагах 8 и 9, ниже, чем максимальный уровень бокового лепестка Umax, определенного на шаге 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ СВЕРТОЧНОГО КОДИРОВАНИЯ В ЦИФРОВОЙ СИСТЕМЕ | 1999 |
|
RU2214677C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПОСЛЕОПЕРАЦИОННОГО РЕЦИДИВА МНОГОУЗЛОВОГО ЗОБА С ПОМОЩЬЮ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ | 2009 |
|
RU2398289C1 |
| НОВЫЕ ПРОИЗВОДНЫЕ ПОРФИРИНОВ, В ЧАСТНОСТИ ХЛОРИНЫ И/ИЛИ БАКТЕРИОХЛОРИНЫ, И ИХ ПРИМЕНЕНИЕ В ФОТОДИНАМИЧЕСКОЙ ТЕРАПИИ | 2005 |
|
RU2399622C2 |
| Декодер кодов Боуза-Чоудхури-Хоквингема | 1990 |
|
SU1783627A1 |
| СПОСОБ СКРИНИНГОВОЙ ДИАГНОСТИКИ ПОРАЖЕНИЯ СЕРДЦА | 2014 |
|
RU2551347C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ИСХОДА ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ У БОЛЬНЫХ СРЕДНЕГО ВОЗРАСТА В ОСТРОМ ПЕРИОДЕ ВНУТРИЧЕРЕПНЫХ КРОВОИЗЛИЯНИЙ АНЕВРИЗМАТИЧЕСКОЙ ПРИРОДЫ | 2001 |
|
RU2202269C2 |
| СПОСОБ ОЦЕНКИ КАЧЕСТВА ЛЬНЯНОЙ ТРЕСТЫ | 2006 |
|
RU2312177C1 |
| ЭФФЕКТИВНЫЕ АППРОКСИМАЦИИ С ФИКСИРОВАННОЙ ЗАПЯТОЙ ПРЯМОГО И ОБРАТНОГО ДИСКРЕТНЫХ КОСИНУСНЫХ ПРЕОБРАЗОВАНИЙ | 2007 |
|
RU2417423C2 |
| СПОСОБ ДИАГНОСТИКИ ПРЕЭКЛАМПСИИ | 2014 |
|
RU2567821C1 |
| ГЕНОТЕРАПЕВТИЧЕСКИЕ СПОСОБЫ ВВЕДЕНИЯ АГОНИСТОВ АПОЛИПОПРОТЕИНА А-I И ИХ ПРИМЕНЕНИЕ ДЛЯ ЛЕЧЕНИЯ ДИСЛИПИДЕМИЧЕСКИХ НАРУШЕНИЙ | 1998 |
|
RU2222545C2 |
Изобретение относится к электронно-вычислительной технике. Техническим результатом является обеспечение более низкого уровня боковых лепестков апериодической автокорреляционной функции, чем у аналогичной АКФ канонических М-последовательностей, при этом ВКФ этих последовательностей носит равномерный характер, что обеспечивает выделение модулированных зондирующих сигналов в общем радиолокационном канале при реализации режимов многопозиционных бортовых систем. Технический результат достигается тем, что предлагаемый способ реализует поиск М-последовательностей за счет введения новых значений для каждой из кодовых структур, генерируемой в рамках группы полиномов одного порядка, что позволяет однозначно при приеме в общем радиолокационном канале идентифицировать модулированные этой новой последовательностью сигналы, при одновременном их излучении с N позиций многопозиционной системы бортовых РЛС, разнесенных в пространстве и объединенных во взаимодействующую группу. 1 ил.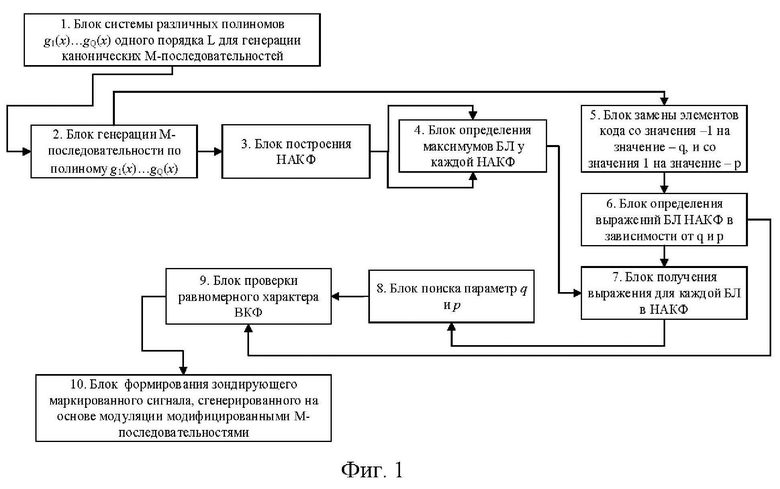
Способ формирования М-последовательностей для генерации сигнально-кодовых конструкций, заключающийся в том, что излучаемый сигнал преобразуют последовательностью, получаемой в результате сложения по модулю два двух исходных последовательностей, сформированных по одному и тому же закону  , где k>n, отличающийся тем, что число исходных последовательностей может быть от 2 до Q, где Q - это количество генерирующих полиномов, существующих в рамках одного порядка, после чего выбирают требуемое количество Q генерирующих полиномов одного порядка L и соответственно осуществляют их генерацию одной длины N, при этом количество Q связано с количеством позиций излучающих бортовых РЛС в многопозиционной системе, далее значения {1; 0} каждой из Q последовательностей приводят к значениям пары {1; -1} и для этих последовательностей строят нормированные к единице автокорреляционные функции, по которым определяют максимальное по модулю значение боковых лепестков Umax, а в сгенерированных М-последовательностях заменяют их элементы со значением «-1» на «q» и со значением «1» на «p», после чего определяют систему выражений S1, … , SQ, где S=(R1(p, q), …, RN(p,q)), описывающие изменения уровней каждого из N лепестков автокорреляционной функции и соответствующей системы Sν взаимокорреляционных функций в зависимости от введенных параметров «р» и «q» в каждую из структур отдельных М-последовательностей генерируемых различными полиномами одного порядка L, после чего по системе выражений S1 … SQ определяют значения «р» и «q», при которых уровни боковых лепестков нормированной автокорреляционной функции будут наименьшими из возможных уровней, из числа тех, что ниже значения Umax с учетом выражений системы Sν, полученных для взаимокорреляционных функций, которая будет иметь равномерный характер при подстановке значения «р» и «q», после чего формируют зондирующий маркированный сигнал, сгенерированный на основе модуляции полученными выше модифицированными М-последовательностями.
, где k>n, отличающийся тем, что число исходных последовательностей может быть от 2 до Q, где Q - это количество генерирующих полиномов, существующих в рамках одного порядка, после чего выбирают требуемое количество Q генерирующих полиномов одного порядка L и соответственно осуществляют их генерацию одной длины N, при этом количество Q связано с количеством позиций излучающих бортовых РЛС в многопозиционной системе, далее значения {1; 0} каждой из Q последовательностей приводят к значениям пары {1; -1} и для этих последовательностей строят нормированные к единице автокорреляционные функции, по которым определяют максимальное по модулю значение боковых лепестков Umax, а в сгенерированных М-последовательностях заменяют их элементы со значением «-1» на «q» и со значением «1» на «p», после чего определяют систему выражений S1, … , SQ, где S=(R1(p, q), …, RN(p,q)), описывающие изменения уровней каждого из N лепестков автокорреляционной функции и соответствующей системы Sν взаимокорреляционных функций в зависимости от введенных параметров «р» и «q» в каждую из структур отдельных М-последовательностей генерируемых различными полиномами одного порядка L, после чего по системе выражений S1 … SQ определяют значения «р» и «q», при которых уровни боковых лепестков нормированной автокорреляционной функции будут наименьшими из возможных уровней, из числа тех, что ниже значения Umax с учетом выражений системы Sν, полученных для взаимокорреляционных функций, которая будет иметь равномерный характер при подстановке значения «р» и «q», после чего формируют зондирующий маркированный сигнал, сгенерированный на основе модуляции полученными выше модифицированными М-последовательностями.
| СПОСОБ ФОРМИРОВАНИЯ И ПРИЕМА СЛОЖНЫХ СИГНАЛОВ НА ОСНОВЕ М-ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2005 |
|
RU2276385C1 |
| Устройство формирования модифицированных М-последовательностей | 2023 |
|
RU2801743C1 |
| Генератор М-последовательностей | 1989 |
|
SU1676074A2 |
| Формирователь псевдослучайных М-последовательностей | 1980 |
|
SU911695A1 |
| US 7139397 B2, 21.11.2006. | |||

