Изобретение относится к области приборостроения и может использоваться в системах резервирования пилотажно-навигационных устройств.
Известна система определения пространственного положения и курса летательного аппарата [1], содержащая блок датчиков угловой скорости, блок датчиков линейного ускорения, трехкомпонентный магнитометр, датчики температуры блока датчиков угловой скорости и блок датчиков линейного ускорения, узел коммутации, буферный каскад, модуль сопряжения, узел интерфейса, вычислитель.
Недостатком данной системы является недостаточная надежность, так как режим ускоренной компенсации накопленной виражной погрешности может выполняться при наличии активных действующих ускорений.
Известна интегрированная система резервных приборов [2], выполненная в виде отдельного блока, содержащая датчики полного и статического давления, устройство обработки и преобразования сигналов, вычислитель, модуль пространственной ориентации, магнитный зонд, жидкокристаллический индикатор, блок приема режимов полета и запоминающее устройство с записанными аэродинамическими поправками к показаниям приемников воздушных давлений для конкретного летательного аппарата.
Недостатком данной системы является недостаточная точность и надежность, так как отсутствует режим ускоренной компенсации накопленной виражной погрешности.
Поставленная задача решается за счет того, что в интегрированную систему резервных приборов, выполненную в виде отдельного блока, содержащего датчики полного и статического давления, устройство обработки и преобразования сигналов, вычислитель, модуль пространственной ориентации, магнитный зонд, жидкокристаллический индикатор, блок приема режимов полета и запоминающее устройство с записанными аэродинамическими поправками к показаниям приемников воздушных давлений для конкретного летательного аппарата, дополнительно введены блок формирования признака равномерного горизонтального полета, подключенный входом к модулю пространственной ориентации, а выходом к вычислителю и жидкокристаллическому индикатору, а также соединенные последовательно узел коммутации, буферный каскад, модуль сопряжения, подключенные к вычислителю.
Отличительной особенностью заявленной системы является введение в нее узел коммутации, буферный каскад, модуль сопряжения и блока формирования признака равномерного горизонтального полета, что позволяет производить режим быстрого списания накопленной погрешности, после выполнения интенсивных маневров и виражей. Режим ускоренной компенсации накопленной виражной погрешности выполняется вручную по команде летчика при визуальном наблюдении рассогласований показаний интегрированной системы резервных приборов и основной инерциальной навигационной системы. При выполнении команды во время действия активных ускорений происходит компенсация накопленной погрешности не к истинной, а к кажущейся вертикали, что может привести к еще большим рассогласованиям между интегрированной системой резервных приборов и основной инерциальной навигационной системой. Введение блока формирования признака равномерного горизонтального полета предотвращает выполнение ручной команды ускоренной компенсации накопленной виражной погрешности до момента выхода летательного аппарата в горизонтальный равномерный полет.
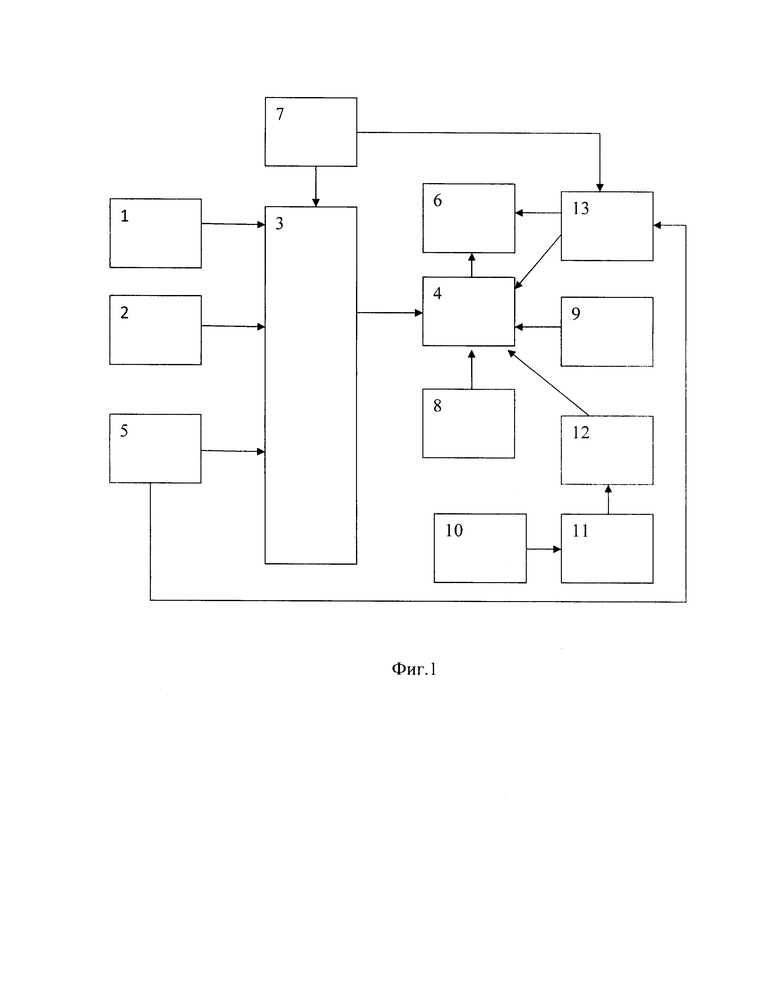
На фиг. 1 представлена схема системы, содержащей датчик 1 полного давления, датчик 2 статического давления, устройство 3 обработки и преобразования сигналов, вычислитель 4, модуль 5 пространственной ориентации, ЖК индикатор 6, магнитный зонд 7, блок 8 приема режимов полета, запоминающее устройство 9, узел коммутации 10, буферный каскад 11, модуль сопряжения 12, блок формирования признака равномерного горизонтального полета 13.
Заявляемая резервная система работает следующим образом. В процессе полета сигналы от встроенных в систему датчиков 1 и 2 полного и статического давлений поступают в устройство 3 обработки и преобразования сигналов, которое обрабатывает эти сигналы, вычисляет полное и статическое давления, а также корректирует сигналы с датчиков 1 и 2 давлений в зависимости от температуры окружающей среды. Скорректированные сигналы полного и статического давлений и сигнал температуры окружающей среды из устройства 3 обработки и преобразования сигналов поступают в вычислитель 4. С помощью датчиков угловых скоростей, датчиков линейных ускорений и электронных вычислительных средств, размещенных в модуле 5 пространственной ориентации (МПО), а также магнитного зонда 7 вычисляются основные параметры положения летательного аппарата (ЛА): угол крена, угол тангажа, гиромагнитный курс. Данные о линейном ускорении из модуля 5 пространственной ориентации и магнитного зонда 7 поступают в блок 13 формирования признака равномерного горизонтального полета. Данные о статическом и полном давлении поступают в вычислитель 4, который по известным зависимостям вычисляет основные высотно-скоростные параметры: приборную скорость, истинную скорость, абсолютную высоту, относительную высоту, вертикальную скорость, температуру наружного воздуха, число Маха. Вычислитель 4 получает из блока 8 информацию о текущем режиме полета и выбирает из памяти запоминающего устройства 9 соответствующий массив с аэродинамическими поправками к показаниям приемников воздушных давлений для данного режима и повторно проводит вычисления пилотажных параметров с учетом вышеуказанных поправок и выдает эту информацию на индикатор 6. Блок 13 формирования признака равномерного горизонтального полета по величинам модуля полного ускорения вычисляемого по датчикам линейных ускорений из блока 5 пространственной ориентации и по измеренным проекциям вектора магнитного поля Земли от магнитного зонда 7 выдает в вычислитель 4 признак разрешения проведения режима ускоренной компенсации, а на жидкокристаллический индикатор команду для индикации символа прямолинейного горизонтального полета. Блок 13 формирования признака равномерного горизонтального полета анализирует полет по следующим зависимостям:

где Ах, Ay, Az - ускорения измеряемые датчиками линейных ускорений;
g - ускорение свободного падения;
а доп - пороговое значение ускорения.


где Нх, Ну, Hz - проекции магнитного поля Земли;
Нв, Нг - вертикальная и горизонтальная составляющая магнитного поля Земли в месте полета;
Нвдоп, Нгдоп - пороговые значения магнитного поля.
При выполнении условий (1), (2), (3) выдается признак равномерного горизонтального полета.
Режим ускоренной компенсации накопленной виражной погрешности запускается по нажатию кнопки узла коммутации 10, расположенного на лицевой части жидкокристаллического индикатора, сигнал с которого через буферный каскад 11 и модуль сопряжения 12 попадает в вычислитель 4. Вычислитель 4 при наличии разрешающего признака от блока 13 формирования признака равномерного горизонтального полета проводит необходимые вычисления по приведению ориентации интегрированной системы резервных приборов к истинной вертикали. При отсутствии разрешающей команды от блока 13 формирования признака равномерного горизонтального полета вычислитель 4 ожидает прихода разрешающей команды и выполняет необходимые вычисления по приведению ориентации интегрированной системы резервных приборов к истинной вертикали.
Таким образом, предложенная система повышает точность и надежность определения пространственной ориентации при выполнении режима быстрого списания накопленной погрешности после выполнения интенсивных маневров и виражей за счет введения блока формирования признака равномерного горизонтального полета. Предложенное изобретение предотвращает ошибочное выполнение команды летчика.
Источники информации
1. Патент РФ №2505786 G01C 23/00.
2. Патент РФ №2606712 G01C 21/00 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная система резервных приборов | 2016 |
|
RU2656954C1 |
| Интегрированная система резервных приборов | 2018 |
|
RU2734278C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2606712C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
| Интегрированная система резервных приборов летательного аппарата | 2017 |
|
RU2682134C1 |
| Интегрированная система резервных приборов | 2017 |
|
RU2690029C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ И СПОСОБ КАЛИБРОВКИ ДАТЧИКА МАГНИТНОГО ПОЛЯ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2593424C1 |
| Способ калибровки датчика магнитного поля интегрированной системы резервных приборов | 2016 |
|
RU2660043C1 |
| Интегрированная система резервных приборов | 2020 |
|
RU2790217C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ ДЛЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ | 2006 |
|
RU2337315C2 |
Изобретение относится к области приборостроения и применяется в системах резервирования пилотажно-навигационных устройств. Сущность заявленного технического решения состоит в том, что в систему, содержащую датчик полного давления, датчик статического давления, устройство обработки и преобразования сигналов, вычислитель, модуль пространственной ориентации, ЖК индикатор, магнитный зонд, дополнительно вводят блок формирования признака равномерного горизонтального полета, выполненного с возможностью определения пороговых условий на основании показаний магнитного поля Земли, узел коммутации, буферный каскад, модуль сопряжения. Техническим результатом изобретения является повышение точности и надежности измерения параметров ориентации летательного аппарата. 1 ил.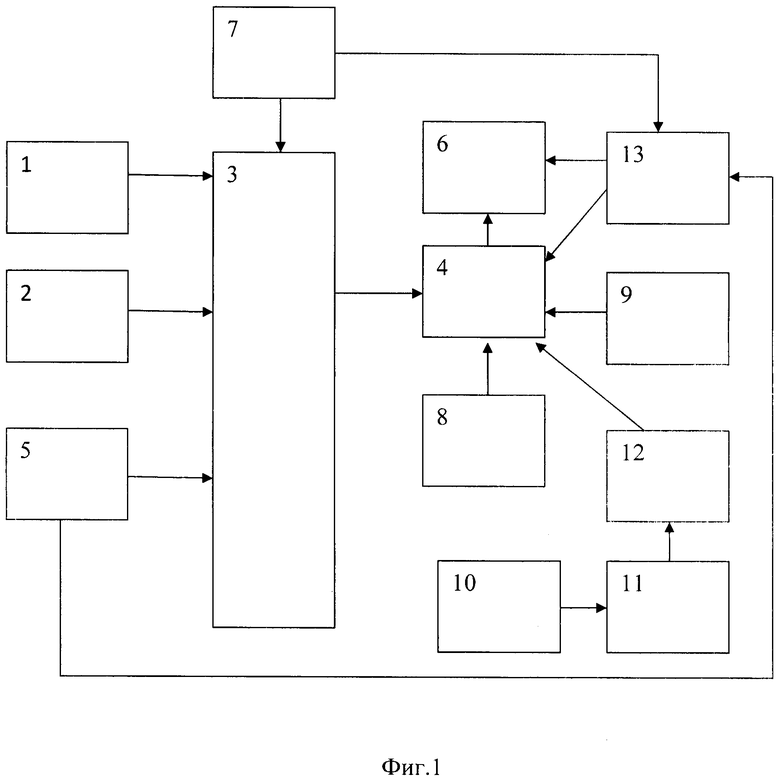
Интегрированная система резервных приборов, выполненная в виде отдельного блока, содержащего датчики полного и статического давления, выходы которых соединены со входами устройства обработки и преобразования сигналов; вычислитель, вход которого соединен с выходом устройства обработки и преобразования сигналов, а выход соединён с жидкокристаллическим (ЖК) индикатором; модуль пространственной ориентации, выход которого соединен со входом устройства обработки и преобразования сигналов; магнитный зонд, выход которого соединен со входом устройства обработки и преобразования сигналов; блок приема режимов полета, выход которого соединен со входом вычислителя; запоминающее устройство, выход которого соединён со входом вычислителя, с записанными аэродинамическими поправками к показаниям приемников воздушных давлений, зависящих от типа летательного аппарата, отличающаяся тем, что дополнительно введены блок формирования признака равномерного горизонтального полета, входы которого соединены с выходом модуля пространственной ориентации и с выходом магнитного зонда, а выходы соединены со входом вычислителя и со входом ЖК индикатора; соединенные последовательно узел коммутации, буферный каскад, модуль сопряжения, подключенные ко входу вычислителя; при этом блок формирования признака равномерного горизонтального полёта выполнен с возможностью анализа полёта по следующим условиям: 
где Ах, Ay, Az – ускорения, измеряемые датчиками линейных ускорений, g - ускорение свободного падения, адоп - пороговое значение ускорения;  ,
,  , где Нх, Ну, Hz - проекции магнитного поля Земли, Нв, Нг - вертикальная и горизонтальная составляющая магнитного поля Земли в месте полета; Нвдоп, Нгдоп - пороговые значения магнитного поля Земли.
, где Нх, Ну, Hz - проекции магнитного поля Земли, Нв, Нг - вертикальная и горизонтальная составляющая магнитного поля Земли в месте полета; Нвдоп, Нгдоп - пороговые значения магнитного поля Земли.
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2606712C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2505786C2 |
| DE 102018211905 A1, 28.02.2019 | |||
| US 6564628 B1, 20.05.2003 | |||
| US 6522992 B1, 18.02.2003. | |||

