Изобретения относятся к области приборостроения и могут применяться в системах навигации летательных аппаратов (ЛА).
Известен базовый измерительный блок [1], содержащий блок датчиков угловой скорости, блок датчиков ускорения, датчик магнитного поля Земли, блок преобразования, вычислитель. Данное устройство основано на способе вычисления приращений углов ориентации и скорости ЛА по трем осям.
Недостатком данного устройства, как и способа его реализации, является низкая надежность, т.к. в случае кратковременного пропадания напряжения питания в полете, что допускается для потребителей 2 категории [2], необходимо снова проводить начальную выставку системы, т.е. производить начальное угловое согласование, а также производить оценку дрейфов датчиков, что обычно делается на неподвижном ЛА и невозможно сделать достаточно точно без использования внешней информации в полете.
Известна также система определения пространственной ориентации и курса ЛА [3], содержащая блок датчиков угловой скорости, блок датчиков линейного ускорения, трехкомпонентный магнитометр, подключенные через аналого-цифровой преобразователь (АЦП) к вычислителю, логический блок с устройствами обработки аналоговых и цифровых сигналов, подключенные через логическое устройство к вычислителю, имеющему в составе запоминающее устройство. Данное устройство основано на способе, заключающемся в использовании информации с блока датчиков угловой скорости, датчиков линейного ускорения, трехкомпонентного магнитометра и признака нахождения ЛА на земле или в полете.
Недостатком данного устройства, как и способа его реализации, является низкая точность, т.к. не используется информация о температуре окружающей среды и отсутствует возможность включения режима ускоренной коррекции.
Задачей, на которую направлены данные изобретения, является повышение надежности и точности системы за счет восстановления рабочего состояния системы после кратковременного пропадания напряжения питания в полете ЛА.
Поставленная задача решается за счет того, что в систему для определения пространственного положения и курса ЛА, содержащую блок датчиков угловой скорости, блок датчиков линейного ускорения, трехкомпонентный магнитометр, подключенные через АЦП к вычислителю с подключенным к нему логическим блоком, согласно изобретению дополнительно введены датчики температуры блока датчиков угловой скорости, блока датчиков линейного ускорения, трехкомпонентного магнитометра, подключенные через АЦП к вычислителю, и соединенные последовательно узел коммутации, буферный каскад, модуль сопряжения, узел интерфейса, подключенные к вычислителю.
В способе определения пространственного положения и курса ЛА, заключающемся в использовании информации с блока датчиков угловой скорости, блока датчиков линейного ускорения, трехкомпонентного магнитометра и признака нахождения ЛА на земле или в полете, согласно изобретению в полете при кратковременном отключении напряжения питания после его восстановления при вычислении углов ориентации используют тарировочные характеристики блока датчиков угловой скорости, блока датчиков линейного ускорения, трехкомпонентного магнитометра с учетом изменения температуры окружающей среды, при этом восстанавливают истинные значения углов по информации с блока датчиков линейного ускорения и трехкомпонентного магнитометра, кроме того, в процессе маневрирования ЛА выводят на горизонтальный, прямолинейный участок полета без ускорения и активизируют режим ускоренной коррекции, при котором согласуют углы, вычисленные по информации блока датчиков угловой скорости, с углами, вычисленными по информации с блока датчиков линейного ускорения и трехкомпонентного магнитометра.
Существенными отличиями предложенного устройства является введение датчиков температуры в блок датчиков угловой скорости, блок датчиков линейного ускорения, трехкомпонентный магнитометр, подключенные через АЦП к вычислителю, и соединенные последовательно узел коммутации, буферный каскад, модуль сопряжения, узел интерфейса, подключенные к вычислителю, для осуществления ускоренной коррекции.
К существенным признакам предложенного способа при кратковременном отключении напряжения питания относится использование тарировочных характеристик блока датчиков угловой скорости, блока датчиков линейного ускорения, трехкомпонентного магнитометра с учетом изменения температуры окружающей среды для восстановления истинного значения углов по информации с блока датчиков линейного ускорения и трехкомпонентного магнитометра, а также активизация режима ускоренной коррекции на горизонтальном, прямолинейном участке полета без ускорения.
На чертеже представлена структурная схема устройства. Устройство содержит блок 1 датчиков угловой скорости, блок 2 датчиков линейного ускорения, трехкомпонентный магнитометр 3, АЦП 4, вычислитель 5, логический блок 6, датчики 7, 8, 9 температуры, узел 10 коммутации, буферный каскад 11, модуль 12 сопряжения, узел 13 интерфейса.
Блок 1 датчиков угловой скорости, блок 2 датчиков линейного ускорения, трехкомпонентный магнитометр 3 подключены через АЦП 4 к вычислителю 5, к которому подключен логический блок 6, датчики 7, 8, 9 температуры подключены через АЦП 4 к вычислителю 5, к которому подключены последовательно соединенные узел 10 коммутации, буферный каскад 11, модуль 12 сопряжения, узел 13 интерфейса.
Система для определения пространственной ориентации и курса ЛА работает следующим образом.
После подачи питания на систему сигналы с блока 1 датчиков угловой скорости, пропорциональные скорости вращения ЛА с блока 2 датчиков линейного ускорения, пропорциональные линейным ускорениям по каждой из 3-х осей с трехкомпонентного магнитометра 3, пропорциональные напряженности магнитного поля Земли, с помощью АЦП 4 преобразуются в цифровой код и поступают на вычислитель 5, логическое устройство 6 выдает признак нахождения ЛА на земле или в полете. При сдаче системы в эксплуатацию выполняют калибровку блока 1 датчиков угловой скорости, блока 2 датчиков линейного ускорения, трехкомпонентного магнитометра 3, в процессе которой измеряют смещение нуля и изменение масштабных коэффициентов с учетом изменения температуры с датчиков 7, 8, 9 и записывают эти значения как тарировочные характеристики в память вычислителя 5.
В случае кратковременного отключения напряжения питания и при наличии в логическом блоке 6 признака нахождения ЛА в полете вычисляют углы ориентации по информации блока 1 датчиков угловой скорости с учетом их тарировочных характеристик. Затем эти углы ориентации приводят к углам, вычисленным по информации блока 2 датчиков линейного ускорения и трехкомпонентного магнитометра 3 с учетом их тарировочных характеристик.
Если кратковременное отключение напряжения питания произошло в полете во время маневрирования, то ЛА выводят на горизонтальный прямолинейный участок полета без ускорения и активизируют режим ускорений коррекции, при котором согласуют углы, вычисленные по информации с блока 1 датчиков угловой скорости, с углами, вычисленными по информации с блока 2 датчиков линейного ускорения и трехкомпонентного магнитометра 3.
Режим ускорений коррекции активизируется пилотом ЛА нажатием кнопки узла 10 коммутации, сигнал с которого через буферный каскад 11, модуль сопряжения 12 и узел 13 интерфейса передается в вычислитель 5, который производит необходимые вычисления.
Таким образом, предложенная система и способ определения пространственного положения и курса ЛА повышает надежность навигационного комплекса и точность пилотирования, т.к. избавляет от режима начальной выставки при кратковременном отключении напряжения питания.
Данные изобретения используются в интегрированной системе резервных приборов.
Источники информации
1. Патент США №6522992, МПК G06F 7/00, НПК 702/141, опубликован 18.02.2003 г.
2. ГОСТ 19705-89 «Системы электроснабжения самолетов и вертолетов. Общие требования и нормы качества электроэнергии.»
3. Патент РФ 2427799, МПК G01C 21/00, 2006 г. (ближайший аналог).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2427799C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПОСЛЕ СБОЯ АППАРАТУРЫ | 2020 |
|
RU2754128C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Интегрированная система резервных приборов | 2023 |
|
RU2831723C1 |
| РЕЗЕРВНАЯ СИСТЕМА ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ ВЫСТАВКИ ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2551710C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Интегрированная система резервных приборов | 2017 |
|
RU2690029C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
Изобретения относятся к области приборостроения и могут применяться в системах навигации летательных аппаратов (ЛА). Задачей, на которую направлены данные изобретения, является повышение надежности и точности системы за счет восстановления рабочего состояния после кратковременного пропадания напряжения питания в полете ЛА. Существенным отличием системы является введение датчиков температуры в блок датчиков угловой скорости, блок датчиков линейного ускорения и трехкомпонентный магнитометр. Существенным отличием способа является использование тарировочных характеристик блока датчиков угловой скорости, блока датчиков линейного ускорения и магнитометра с учетом изменения температуры окружающей среды. Техническим результатом изобретений является повышение надежности навигационного комплекса и точности пилотирования. 2 н. и 1 з.п. ф-лы, 1 ил.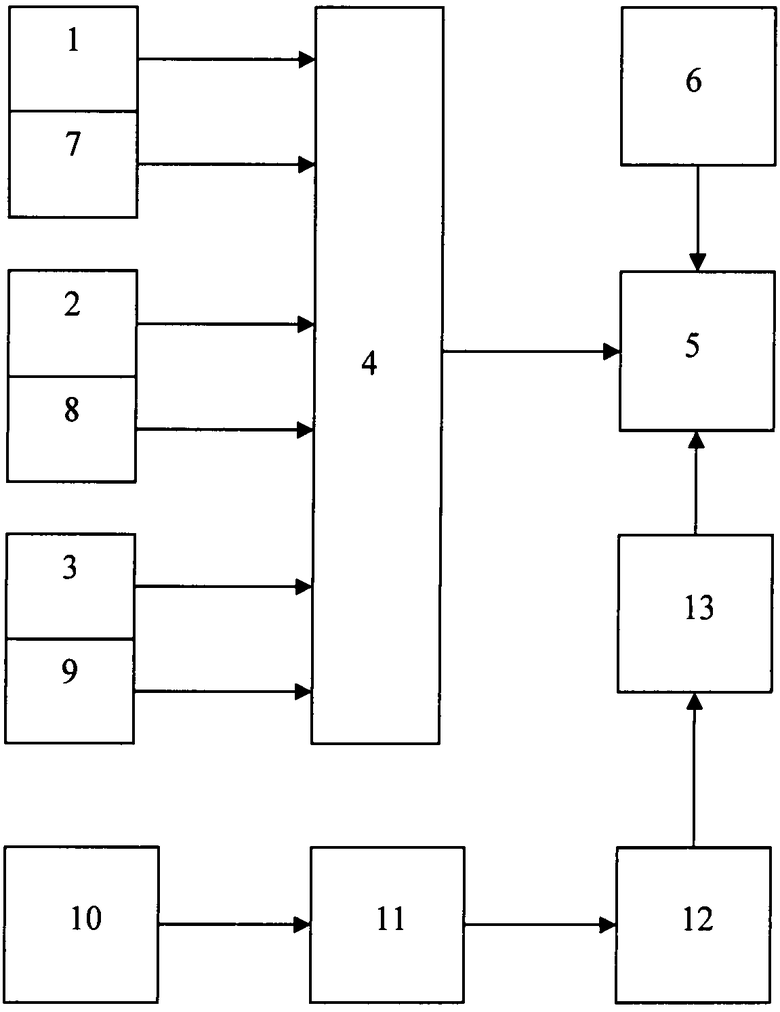
1. Система определения пространственного положения и курса летательного аппарата, содержащая блок датчиков угловой скорости, блок датчиков линейного ускорения, трехкомпонентный магнитометр, подключенные через аналого-цифровой преобразователь к вычислителю с подключенным к нему логическим блоком, отличающаяся тем, что в нее дополнительно введены датчики температуры блока датчиков угловой скорости, блока датчиков линейного ускорения, трехкомпонентного магнитометра, подключенные через аналого-цифровой преобразователь к вычислителю, и соединенные последовательно узел коммутации, буферный каскад, модуль сопряжения, узел интерфейса, подключенные к вычислителю.
2. Способ определения пространственного положения и курса летательного аппарата, заключающийся в использовании информации с блока датчиков угловой скорости, датчиков линейного ускорения, трехкомпонентного магнитометра и признака нахождения летательного аппарата на земле или в полете, отличающийся тем, что в полете при кратковременном отключении напряжения питания после его восстановления при вычислении углов ориентации используют тарировочные характеристики блока датчиков угловой скорости, блока датчиков линейного ускорения, трехкомпонентного магнитометра с учетом изменения температуры окружающей среды, при этом восстанавливают истинные значения углов по информации с блока датчиков линейного ускорения и трехкомпонентного магнитометра.
3. Способ определения пространственного положения и курса летательного аппарата по п.2, отличающийся тем, что при кратковременном отключении напряжения питания после его восстановления в процессе маневрирования летательный аппарат выводят на горизонтальный, прямолинейный участок полета без ускорения и активизируют режим ускоренной коррекции, при котором согласуют углы, вычисленные по информации блока датчиков угловой скорости, с углами, вычисленными по информации с блока датчиков линейного ускорения и трехкомпонентного магнитометра.
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2427799C1 |
| US 6522992 B1, 18.02.2003 | |||
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2004 |
|
RU2282869C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285932C1 |
| US 6901331 В1, 31.05.2005. | |||

