Изобретение относится к способу непрямого определения длины выдвижения по меньшей мере одной телескопической секции телескопической стрелы относительно другой телескопической секции и/или основной секции телескопической стрелы, в частности по меньшей мере части телескопической стрелы, грузоподъемного устройства. Изобретение также относится к компьютерному программному продукту. Изобретение также относится к грузоподъемному устройству, содержащему по меньшей мере одну телескопическую секцию и/или по меньшей мере одну телескопическую стрелу, по меньшей мере один первый датчик, который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, необязательно по меньшей мере один дополнительный датчик, который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, и по меньшей мере одно устройство управления и/или регулирования.
В обычных грузоподъемных устройствах предшествующего уровня техники обычно используется измерительный трос для непосредственного определения длины выдвижения телескопической стрелы. Однако, затраты на измерительные тросы значительны, и, в частности, из-за открытого расположения измерительного троса на телескопических секциях измерительный трос подвергается воздействию окружающей среды, например, погодным условиям, что ограничивает срок службы измерительного троса и затрудняет комплекс работ по монтажу и/или техническому обслуживанию, в частности в связи с тросовой направляющей измерительного троса. Кроме того, измерительный трос часто не может быть встроен в грузоподъемное устройство из-за нехватки места, а также существует риск обрыва и/или выпадения измерительного троса из направляющей троса при такой форме определения длины выдвижения, что существенно ограничивает функциональность грузоподъемного устройства. Кроме того, для правильной работы измерительный трос должен быть постоянно предварительно натянут.
Из документа DE 102019211880 А1 уже известен способ непрямого определения длины выдвижения, в котором текущее значение объема цилиндра определяют на основе количества рабочей жидкости, подаваемой или удаляемой из напорной камеры гидроцилиндра, при этом на основе значение объема цилиндра может быть определено текущее значение длины выдвижения. Однако, на практике определение длины выдвижения на основе движения гидравлической жидкости недостаточно для обеспечения достаточно точного определения длины выдвижения, тем более, что задействовано большое количество влияющих переменных, таких как давление, температура, вязкость и т. д., а при определении длины выдвижения требуется высокая степень точности текущей длины выдвижения, чтобы можно было передать ее, например, в функцию комфорта грузоподъемного устройства для надежных расчетов. Кроме того, абсолютная ошибка быстро накапливается в большие отклонения, поскольку неточности постоянно суммируются в виде дополнительных ошибок.
Таким образом, объективной технической задачей настоящего изобретения является предоставление способа непрямого определения длины выдвижения, а также грузоподъемного устройства, улучшенного по сравнению с известным уровнем техники, в котором, по меньшей мере частично, устранены недостатки предшествующего уровня техники и которые, в частности, характеризуется тем, что могут использоваться в подъемном оборудовании с ограниченным пространством для установки, благодаря чему можно также обеспечить точное или надежное значение длины выдвижения для сложных функций комфорта без необходимости измерительных тросов или чего-либо подобного.
Данная задача решается признаками пункта 1 формулы изобретения.
В соответствии с ним согласно изобретение предусмотрено выполнение следующих этапов способа:
- по меньшей мере один первый датчик, который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, определяет по меньшей мере один первый параметр по меньшей мере одной телескопической секции и/или телескопической стрелы, в частности в течение интервала времени, при этом посредством по меньшей мере одного первого параметра, предпочтительно посредством физической модели, определяют и/или рассчитывают первую виртуальную длину выдвижения,
- по меньшей мере один первый датчик и/или по меньшей мере один дополнительный датчик, который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, определяет по меньшей мере один дополнительный параметр по меньшей мере одной телескопической секции и/или телескопической стрелы, в частности в течение интервала времени, причем посредством по меньшей мере одного дополнительного параметра, предпочтительно с помощью физической модели определяют и/или рассчитывают по меньшей мере одну дополнительную виртуальную длину выдвижения,
- длину выдвижения по меньшей мере одной телескопической секции или телескопической стрелы определяют и/или рассчитывают по первой виртуальной длине выдвижения и по меньшей мере одной дополнительной виртуальной длине выдвижения.
Это позволяет определять длину выдвижения без датчиков для непосредственного определения длины выдвижения. Кроме того, существует положительный эффект, заключающийся в том, что длина выдвижения может быть определена очень точно, поскольку длина выдвижения может быть определена по меньшей мере по двум виртуальным длинам выдвижения - на основе, например, расчетов различных положенных в основу физических моделей благодаря чему способ может гибко использоваться с широким разнообразием конструктивных исполнений грузоподъемных устройств, в частности для уменьшения необходимого монтажного пространства.
Грузоподъемное устройство может, например, представлять собой телескопическое рабочее устройство с рабочей корзиной или для удержания контейнеров и/или для перемещения грузов с помощью грузового стропа. Грузоподъемное устройство особенно предпочтительно представляет собой машину, такую как кран, подъемную рабочую платформу или стрелу крана.
Параметр, определяемый датчиком, может, например, представлять собой сигнал датчика или производную из него величину, причем производная величина предпочтительно рассчитывается и/или определяется с помощью физической модели. Параметр обычно может определяться дискретно или непрерывно во времени, при этом длина выдвижения также может определяться дискретно или непрерывно во времени, в частности, в зависимости от задействованных датчиков и/или физических моделей.
Например, функция комфорта для грузоподъемного устройства предоставляет собой координатное управление, которое можно осуществлять с использованием такого способа, чтобы иметь возможность управлять точными вертикальными или горизонтальными перемещениями телескопической стрелы удобным для пользователя образом. Кроме того, этот способ также можно использовать для концепций устойчивости и/или безопасности при перегрузках, при этом, в частности, могут быть приняты во внимание нормативные требования, касающиеся аспектов безопасности. Однако, в частности, экономятся затраты на функции комфорта, не связанные с безопасностью (например, вспомогательные функции для повышения производительности), а также сокращаются работы по сборке и техническому обслуживанию, поскольку длину выдвижения можно определить с помощью физических моделей. Настоящее изобретение также может быть гибко реализовано с широким спектром различных грузоподъемных устройств и, как правило, может использоваться с датчиками, уже имеющимися на грузоподъемном устройстве, без необходимости перепроектирования конструкции грузоподъемного устройства.
По меньшей мере один первый датчик и по меньшей мере один дополнительный датчик, с учетом соответственно отличающихся друг от друга лежащих в основе физических моделей для дальнейшей обработки сигналов датчиков и/или выведенных из них переменных, могут рассматриваться как виртуальные датчики в отношении регистрации длины выдвижения, которые отличаются от датчика прямого измерения длины выдвижения на основе прямого определения длины выдвижения. Примерами такого датчика прямого измерения длины выдвижения в этом контексте могут быть GPS, лазеры, лидары, радары, камеры, измерительные тросы, потенциометры, кодируемые магнитные ленты, индуктивные или магниторезистивные датчики измерения длины и т.п., при этом по меньшей мере один первый датчик и по меньшей мере один дополнительный датчик позволяет косвенно делать выводы в отношении длины выдвижения.
Находящаяся во взаимосвязи первая телескопическая секция, связанная с виртуальной длиной выдвижения, не ограничивается самой внутренней или самой внешней телескопической секцией, но может представлять собой любую телескопическую секцию телескопической стрелы. Длина выдвижения определяется как выдвинутая длина (в частности, существующая в настоящее время или накопленная из заранее определенного значения) телескопической секции, участка телескопической стрелы или телескопической стрелы. В этом контексте главная секция определяется в том смысле, что она представляет собой, предпочтительно не выдвижную, телескопическую секцию телескопической стрелы, которая находится ближе всего к колонне крана, при этом телескопическая секция, ближайшая к телескопической стреле, является выдвижной (телескопической) от основной стрелы.
Основная стрела может быть идентифицирована как шарнирная стрела или, в частности, как невыдвижная стрела крана, при этом стрела крана, как правило, расположенная перед шарнирной стрелой или телескопической стрелой, например, в форме колонны крана или секции крана, ближайшей к колонне крана, также может быть определена как основная стрела, при этом виртуальная длина выдвижения телескопической стрелы может быть определена из любой опорной точки.
Как указывалось выше, охрана также испрашивается на компьютерный программный продукт, содержащий инструкции, которые при выполнении вычислительным блоком побуждают его выполнять упомянутый способ из блока памяти, который находится в соединении с вычислительным блоком для передачи данных или может быть переведен в него.
Вычислительный блок и/или блок памяти могут, например, быть включены в состав устройства управления и/или регулирования грузоподъемного устройства, например, в виде модуля, или находиться с ним в соединении для передачи данных. Устройство управления и/или регулирования может выполнять расчет длины выдвижения, например, с помощью алгоритма и с помощью физических моделей.
Как указывалось выше, охрана также испрашивается для грузоподъемного устройства, содержащего по меньшей мере одну телескопическую секцию и/или по меньшей мере одну телескопическую стрелу, по меньшей мере один первый датчик, который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, при необходимости по меньшей мере один дополнительный датчик, который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, и по меньшей мере одно устройство управления и/или регулирования, при этом устройство управления и/или регулирования выполнено для осуществления упомянутого способа.
Этот способ также можно использовать с большим количеством грузоподъемных устройств, таких как краны, при этом определенные длины выдвижения телескопических стрел отдельных кранов сравниваются друг с другом для координации общих последовательностей движений. В частности, этот способ можно использовать для особенно дешевого выполнения тандемного подъема большим количеством кранов. Перемещение нескольких различных телескопических стрел на грузоподъемном устройстве также можно особенно дешево осуществлять с помощью этого способа, предпочтительно одновременно, при этом, в частности, для определения виртуальной длины выдвижения могут использоваться разные физические модели, разные классы или значения качества и/или разный вес.
Преимущественные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Согласно предпочтительному варианту осуществления изобретения предусмотрено, что первая виртуальная длина выдвижения и/или по меньшей мере одна дополнительная виртуальная длина выдвижения взвешивается, предпочтительно, когда вес
- имеет форму заранее определенной статической весовой величины и/или
- определяется и/или рассчитывается посредством истории первой виртуальной длины выдвижения и/или по меньшей мере одной дополнительной виртуальной длины выдвижения и/или,
- определяется и/или рассчитывается путем статистической оценки первой виртуальной длины выдвижения и/или по меньшей мере одной дополнительной виртуальной длины выдвижения и/или,
- определяется и/или рассчитывается в зависимости от класса качества и/или значения качества первой виртуальной длины выдвижения и/или по меньшей мере одной дополнительной виртуальной длины выдвижения и/или,
- определяется и/или рассчитывается в зависимости от предварительно определенного и/или определяемого весового параметра.
Вес, как правило, различен для виртуальных длин выдвижения, которые определяются с учетом разных физических моделей и/или различных положенных в основу параметров, зафиксированных по меньшей мере одним датчиком и/или по меньшей мере одним дополнительным датчиком. Однако, вес может измениться и для виртуальной длины выдвижения, если, например, изменяется рабочий параметр грузоподъемного устройства, который влияет на расчет виртуальной длины выдвижения. Примеры весовых параметров могут представлять собой, среди прочего, класс качества, значение качества, тип грузоподъемного устройства, конструкцию грузоподъемного устройства, количество телескопических стрел и/или телескопических секций, количество телескопических секций на телескопическую стрелу, тип датчиков и/или параметров, количество используемых физических моделей и/или виртуальных длин выдвижения, требования (например, в отношении точности, динамики, ошибок и т. д.) и/или планируемое использование длины выдвижения, изменения класса качества/значения качества, различия между виртуальными длинами выдвижения и т. д.
Например, фиксированные или предварительно заданные весовые параметры могут использоваться для расчета виртуальной длины выдвижения, при этом виртуальная длина выдвижения как правило может также определяться на основе определяемых весовых параметров или весов, определенных с помощью заранее определенных весовых параметров. В вес могут быть включены различные параметры, такие как конструкция, конфигурация и т.п. грузоподъемного устройства и/или другие влияющие факторы.
Класс качества может, например, представлять собой классификацию виртуальной длины выдвижения с точки зрения точности и/или надежности. Значение качества может, например, представлять собой числовое значение, касающееся точности и/или надежности виртуальной длины выдвижения. Таким образом, классификация качества виртуальной длины выдвижения может быть достигнута в зависимости от положенной в основу физической модели, при этом, например, при определении длины выдвижения в качестве альтернативы или в дополнение можно использовать преимущественно текущую вероятность ошибки, известные неопределенности соответствующей физической модели и т. д. Класс качества и значение качества могут использоваться альтернативно или дополнительно для определения длины выдвижения.
История как правило может включать в себя предыдущие перемещения грузоподъемного устройства и/или цифровые записи предыдущих длин выдвижения и/или виртуальных длин выдвижения.
Другие весовые коэффициенты, как правило, возможны в качестве дополнения и/или альтернативы в зависимости от требований грузоподъемного устройства и/или области применения грузоподъемного устройства, при этом весовые коэффициенты также могут быть адаптированы в зависимости от желаемой точности длины выдвижения.
Особенно предпочтительно, если классы качества/значения качества находятся во взаимодействии с весами, причем измененный, например, в соответствии с механизмом обратной связи, класс качества воздействует на вес и адаптирует его.
Предпочтительно предусмотрено, чтобы при определении веса учитывался по меньшей мере один из следующих критериев: тип грузоподъемного устройства, вариант исполнения телескопической стрелы, количество телескопических секций и/или телескопических стрел, тип по меньшей мере одного первого датчика и/или по меньшей мере одного дополнительного датчика, тип по меньшей мере одного первого параметра и/или по меньшей мере одного дополнительного параметра, количество используемых параметров, текущее рабочее положение телескопической стрелы, требования к длине выдвижения, планируемое использование длины выдвижения, рабочие параметры грузоподъемного устройства.
Вес обычно можно использовать как в динамических, так и в статических и статистических расчетах длины выдвижения. Рабочие параметры могут, например, представлять собой текущую температуру или существующее в настоящий момент давление.
Под типом параметра понимается, что параметр (при необходимости, в виде сигнала датчика или производной величины) может иметь, например, форму параметра колебаний, такого как частота или амплитуда, параметр давления, значение уровня заполнения, объемный расход, положение, такое как положение заслонки или положение управляющего ползуна, скорость вращения и/или комбинации параметров, и лежащие в основе физические модели для определения длины выдвижения могут различаться по сложности и/или точности, при этом вес виртуальной длины выдвижения может приниматься в зависимости от имеющихся параметров, которые оказывают непосредственное влияние. Параметр, как правило, также может присутствовать как производная величина, например, колебание, регистрируемое датчиком, с помощью которой частота может быть выведена как параметр. В общем, параметры также можно комбинировать с влияющими переменными, такими как давление, температура, наклон или геометрия грузоподъемного устройства и т.п.
Оказалось предпочтительным, если вес подстраивается во время работы грузоподъемного устройства, предпочтительно телескопической стрелы и/или динамически в каждом цикле сканирования, предпочтительно мобильного, устройства управления и/или регулирования.
Это позволяет точно обеспечить использование и/или визуализацию длины выдвижения с особенно высоким временным разрешением. Например, значения качества/классы качества также могут динамически подстраиваться для определения длины выдвижения. Рабочие параметры, как правило, могут изменяться при приведении дополнительных исполнительных механизмов грузоподъемного устройства, в частности, находящихся в соединении и не находящихся в прямой взаимосвязи с длиной выдвижения телескопической стрелы, при этом виртуальная длина выдвижения может плавно подстраиваться, даже если сама телескопическая стрела в данный момент не выдвигается активно. Изменение длины выдвижения в результате способа можно отслеживать, ограничивать, разрешать и/или предотвращать с помощью уставок телескопической стрелы.
При постоянном изменении взвешивания можно учитывать следующие критерии:
- изменения значений качества и/или классов качества,
- разница между длиной выдвижения и виртуальной длиной выдвижения, причем отклонения, в частности, приводят к изменению значения качества/класса качества,
- взаимосвязь между классами качества/значениями качества и отклонениями между виртуальной длиной выдвижения и длиной выдвижения,
- значимые тенденции в виртуальной длине выдвижения конкретной физической модели/параметра, в частности, для обнаружения возможных несоответствий в расчетах и/или нежелательных рабочих состояний.
Согласно предпочтительному варианту осуществления изобретения предусмотрено, что первая виртуальная длина выдвижения и/или по меньшей мере одна дополнительная виртуальная длина выдвижения классифицируется предпочтительно по классам качества и/или по значению качества, при этом предпочтительно предусмотрено, что класс качества и/или значение качества длины выдвижения определяется и/или рассчитывается.
Например, из-за присущих ошибок положенной в основу физической модели, допусках компонентов, точности измерений и/или рабочих параметрах в соответствующем приложении качество виртуальной длины выдвижения может отличаться от виртуальных длин выдвижения на основе дифференцированных параметров и/или физических моделей, используемых для определения. Классификация по классам качества и/или значениям качества может использоваться, например, для разного веса виртуальных длин выдвижения и/или использования тех виртуальных длин выдвижения, которые имеют особенно высокую точность для расчета длины выдвижения.
Качество физической модели и/или качество параметра датчика для определения виртуальных длин выдвижения может быть включено в классификацию виртуальных длин выдвижения по классам качества и/или по значениям качества, при этом особенно предпочтительно принимать во внимание вероятности ошибок, известные неопределенности и подобное.
Оказалось предпочтительным, что класс качества и/или значение качества подстраивают при работе грузоподъемного устройства, предпочтительно телескопической стрелы и/или динамически в каждом цикле сканирования, предпочтительно мобильного, устройства управления и/или регулирования, причем предпочтительно предусмотрено, что класс качества и/или значение качества
- первой виртуальной длины выдвижения и/или по меньшей мере одной дополнительной виртуальной длины выдвижения подстраивают в зависимости по меньшей мере от одного из следующих критериев: рабочее положение телескопической стрелы, при необходимости имеющийся вес, история движения грузоподъемного устройства, продолжительность телескопического движения, дальнейшие движения грузоподъемного устройства, рабочие параметры грузоподъемного устройства и/или
- длины выдвижения подстраивают в зависимости, предпочтительно, от класса качества и/или значения качества, первой виртуальной длины выдвижения и/или, предпочтительно, от класса качества и/или значения качества, по меньшей мере одной дополнительной виртуальной длины выдвижения.
Дальнейшие движения грузоподъемного устройства следует понимать как движения грузоподъемного устройства, которые отличаются от телескопических движений, такие как изменения геометрии и/или изгибающие движения. Рабочий параметр включает в себя, например, температуру, давление, вязкость гидравлического масла, изменения углового положения вследствие изменения геометрии, геометрию телескопической стрелы, геометрию грузоподъемного устройства, рабочее положение телескопической стрелы, массу груза, расположенного на телескопической стреле и т.п. относительно грузоподъемного устройства.
Особенно предпочтительно, чтобы величина, влияющая на класс качества и/или значение качества, представляла собой область ошибок виртуальной длины выдвижения и/или значение буфера разницы между по меньшей мере двумя виртуальными длинами выдвижения.
Преимущественный вариант заключается в том, что по меньшей мере одну область ошибок определяют и/или рассчитывают предпочтительно с учетом при необходимости имеющегося веса для первой виртуальной длины выдвижения, по меньшей мере одной дополнительной виртуальной длины выдвижения и/или длины выдвижения.
Это позволяет пользователю и/или устройству управления и/или регулирования особенно выгодно оценить, до какой степени длина выдвижения корректно определена и остается соответственно надежной.
Область ошибок может использоваться для определения веса виртуальных длин выдвижения и/или класса качества или значения качества виртуальной длины выдвижения. Область ошибок как правило может быть результатом положенной в основу физической модели и/или может быть рассчитана, например, с использованием гауссовского накопления погрешностей из значений допуска при определении виртуальной длины выдвижения. Различия в виртуальных длинах выдвижения могут учитываться с помощью буфера, чтобы последовательно подстраивать буфер по виртуальным длинам выдвижения и/или последовательно/непрерывно корректировать виртуальные длины выдвижения более низких классов качества и/или значений качества или длину выдвижения.
Длина выдвижения, определенная этим способом, может (и должна) представлять собой постоянную величину, особенно для дальнейшей обработки, посредством чего дискретные физические модели для определения виртуальной длины выдвижения через буфер также могут быть преобразованы в непрерывные длины выдвижения и/или виртуальные длины выдвижения. Однако, непрерывность длины выдвижения и/или виртуальной длины выдвижения не обязательно должна создаваться буфером.
Особенно предпочтительно, чтобы первая виртуальная длина выдвижения, по меньшей мере одна дополнительная виртуальная длина выдвижения и/или длина выдвижения, предпочтительно вместе по меньшей мере с одной при необходимости имеющейся областью ошибок, визуализировались с помощью устройства визуализации.
Это означает, что оператор грузоподъемного устройства может сразу увидеть, какая длина выдвижения доступна в данный момент, без необходимости использования прямых методов измерения и/или необходимости понимать сложные причинно-следственные связи.
В одном примерном варианте осуществления изобретения предусмотрено, что первая виртуальная длина выдвижения, по меньшей мере одна дополнительная виртуальная длина выдвижения и/или длина выдвижения определяется и/или рассчитывается по существу непрерывно или дискретно во времени.
Также возможна комбинация определения непрерывно и дискретно во времени, при этом способ можно гибко адаптировать к условиям грузоподъемного устройства и/или к требованиям грузоподъемного устройства.
Дополнительно или в качестве альтернативы виртуальные длины выдвижения и/или длина выдвижения могут использоваться в устройстве управления и/или регулирования для дальнейшего использования, например, в расчетах относительно функций комфорта и/или при выполнении функций комфорта грузоподъемного устройства.
Согласно предпочтительному варианту осуществления изобретения предусмотрено, что длину выдвижения ни в каком рабочем цикле грузоподъемного устройства и/или ни в какой момент времени не определяют и/или не рассчитывают исключительно через первую виртуальную длину выдвижения.
Поскольку длина выдвижения определяется с использованием как минимум двух виртуальных длин выдвижения, флуктуации отдельных виртуальных длин выдвижения компенсируются, и точность длины выдвижения может быть гарантирована в высокой степени за счет уменьшения ошибок.
Например, выдвижение и/или втягивание по меньшей мере одной телескопической секции можно определить как рабочий цикл.
Оказалось преимущественным, что первую виртуальную длину выдвижения, по меньшей мере одну дополнительную виртуальную длину выдвижения и/или длину выдвижения определяют и/или рассчитывают с учетом по меньшей мере одного дополнительного параметра, предпочтительно по меньшей мере одного из следующих дополнительных параметров: геометрия телескопической стрелы, геометрия грузоподъемного устройства, рабочее положение телескопической стрелы, масса груза, расположенного на телескопической стреле, рабочий параметр грузоподъемного устройства, история движения грузоподъемного устройства, текущее движение грузоподъемного устройства, рабочие состояния гидропотребителей грузоподъемного устройства, продолжительность телескопического движения.
При определении длины выдвижения особенно предпочтительно учитываются классы качества и/или значения качества, области ошибок и/или значения буфера виртуальной длины выдвижения.
Алгоритм расчета длины выдвижения особенно удобно расширять путем добавления дополнительных критериев и/или дополнительных параметров без необходимости конструктивного изменения грузоподъемного устройства.
Кроме того, предпочтительно предусмотрено, что по меньшей мере одна телескопическая секция содержит гидравлический приводной блок по меньшей мере с одной заслонкой, при этом по меньшей мере одна заслонка имеет множество положений заслонки для управления потоком гидравлического масла в гидравлическом приводном блоке, при этом по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком определяют по меньшей мере один параметр в виде текущего положения заслонки, при этом через по меньшей мере один параметр, предпочтительно с помощью физической модели, делают вывод об объемном расходе в гидравлическом приводном блоке.
Переход от сигнала датчика или величины, полученной на основе сигнала датчика, к виртуальной длине выдвижения обычно происходит с помощью физической модели.
В данном контексте заслонка может быть реализована, например, посредством управляющего стержня или клапана удержания нагрузки. Текущее положение клапана можно измерить, например, с помощью датчика положения, при этом общий объем в гидравлическом цилиндре и, следовательно, ход цилиндра можно определить путем накопления объемного расхода за определенный интервал времени. Также можно использовать характеристики объемного расхода, которые при необходимости можно адаптировать с помощью дополнительных физических моделей, при этом перепад давления обычно можно считать постоянным. Например, также может быть принято во внимание различие между цилиндрами с последовательным и непоследовательным управлением или повторная инициализация модели объемного расхода на основе результатов измерений и/или результатов физических моделей в отношении других виртуальных длин выдвижения.
Преимущество расчета, основанного на этой физической модели, заключается в том, что виртуальную длину выдвижения можно рассчитывать непрерывно и точно отображать динамические процессы, такие как изменения скорости телескопической секции. Кроме того, на одном устройстве можно определить виртуальную длину выдвижения нескольких телескопических систем.
Значение качества/класс качества этого процесса определения виртуальной длины выдвижения может зависеть от температуры гидравлического масла, углового положения телескопической стрелы, скорости рассматриваемых телескопических секций, температуры окружающей среды, расположенной на телескопической стреле массы груза, положения клапанов, временных интервалов, механизмов последовательного управления и подобного. В частности, скорость может представлять собой целевую скорость рассматриваемых телескопических секций или скорость, заданную оператором грузоподъемного устройства (например, рассматриваемых телескопических секций), поскольку фактическая скорость телескопической секции обычно является неизвестной.
Кроме того, предпочтительно предусмотрено, что по меньшей мере одна телескопическая секция содержит гидравлический приводной блок по меньшей мере с одной позиционно-зависимой заслонкой, при этом потоком гидравлического масла в гидравлическом приводном блоке можно управлять посредством по меньшей мере одной заслонки, при этом посредством по меньшей мере одного первого или по меньшей мере одного дополнительного датчика определяют по меньшей мере один параметр в виде положения по меньшей мере одной заслонки и/или разницы давлений по меньшей мере на одной заслонке, при этом по меньшей мере через один параметр, предпочтительно с помощью физической модели, делают вывод об объемном расходе в гидравлическом приводном блоке.
Позиционно-зависимая заслонка может, например, быть выполнена в виде управляющего стержня, при этом значения объемного расхода могут быть рассчитаны для каждого положения, каждого перепада давления и/или каждого коэффициента плотности гидравлического масла. Коэффициенты плотности могут определяться, в том числе, с помощью датчиков температуры и давления и, в свою очередь, зависят от рабочих параметров грузоподъемного устройства. Интегрируя объемный расход в единицу времени, можно сделать выводы о виртуальной длине выдвижения, при этом значения объемного расхода калибруют, например, при изменении давления, изменении температуры или даже при обнаружении конечного положения телескопической секции.
Преимущество расчета, основанного на этой физической модели, заключается в непрерывном по времени расчете, точном отображении изменений скорости телескопических секций, точном расчете при высоких давлениях нагрузки и возможности использовании в различных телескопических системах. Значения качества/классы качества могут выбираться, например, в зависимости от разности давлений на позиционно-зависимой заслонке и/или значений температуры.
Кроме того, предпочтительно предусмотрено, что по меньшей мере одна телескопическая секция содержит гидравлический приводной блок с масляным баком гидросистемы для снабжения гидравлического приводного блока гидравлическим маслом, при этом посредством по меньшей мере одного первого или по меньшей мере одного дополнительного датчика определяют по меньшей мере один параметр в виде уровня заполнения масляного бака гидросистемы, причем предпочтительно предусмотрено, что дополнительные гидравлические приводные блоки, соединенные с масляным баком гидросистемы, учитывают предпочтительно с помощью физической модели.
Объем, который используется для заполнения с учетом телескопических секций, может быть рассчитан через уровень заполнения резервуара гидравлических потребителей и переведен в виртуальную длину выдвижения, при этом можно компенсировать отклонения уровня заполнения из-за наклона, выплескивания и т.п. (например, с помощью системы датчиков наклона). Поскольку абсолютный расчет объема возможен с момента последней (повторной) инициализации, можно предотвратить накопление ошибки. Значения качества/классы качества могут быть определены в зависимости от наклона масляного бака гидросистемы, изменений температуры и подобного.
Кроме того, предпочтительно предусмотрено, что по меньшей мере одна телескопическая секция содержит гидравлический приводной блок с цилиндропоршневым блоком, причем посредством по меньшей мере одного первого или по меньшей мере одного дополнительного датчика определяют по меньшей мере один параметр в виде собственной частоты по меньшей мере одной телескопической секции и/или телескопической стрелы на цилиндропоршневом блоке, предпочтительно с помощью физической модели.
Здесь, например, датчик измеряет колебание давления как сигнал датчика, с помощью которого собственная частота может быть определена как параметр с использованием физической модели для определения собственной частоты и/или определения виртуальной длины выдвижения как производной переменной.
Процесс телескопирования может вызвать импульс в телескопической стреле, который создает свободные колебания, которые продолжаются в телескопических секциях и могут быть измерены с помощью датчиков давления. Этот импульс не создается искусственно для проведения измерения. Например, известные условия, такие как собственная частота, масса груза, масса телескопической стрелы и/или прочность на изгиб, могут использоваться для определения абсолютного положения телескопической секции или причинно-следственной связи между абсолютным положением телескопической секции. Собственная частота и общая масса определяются эмпирически и сохраняются в виде характеристической кривой, которую можно использовать для определения виртуальной длины выдвижения.
Переменные жесткости, влияние массы груза на собственную частоту, значения сжимаемости гидравлического масла и подобное могут быть приняты во внимание при расчете виртуальной длины выдвижения на основе этой физической модели, при этом также при использовании большого количества телескопических секций является возможным абсолютное определение общего вылета и особенно полезно для применения при небольшом продольном выдвижении телескопических стрел. Критериями для значений качества/классов качества могут быть, например, угловое положение телескопической стрелы, существующая собственная частота, амплитуды колебаний давления, управление клапанами после обнаружения импульсов, возникающих от телескопической стрелы в ход телескопирования. Импульсы во время работы могут быть обнаружены и использованы для определения длины выдвижения. Взвешивание можно произвести аналогичным образом.
Кроме того, предпочтительно предусмотрено, что по меньшей мере одна телескопическая секция содержит гидравлический привод с цилиндропоршневым блоком, при этом по меньшей мере один параметр в виде амплитуды колебаний по меньшей мере одной телескопической секции и/или телескопическая стрела на цилиндропоршневом блоке определяется по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком, предпочтительно посредством физической модели.
Здесь датчик измеряет, например, текущее значение давления в виде сигнала датчика, при этом кривая давления и амплитуда колебаний оцениваются в виде производной величины в качестве параметров с использованием физической модели. Одной из причин кривой давления может быть, например, скачок давления при открытии или закрытии клапана.
Во время процесса выдвижения или втягивания при телескопировании гидравлический клапан обычно открывается при переходе от гидроцилиндров и тем самым вызывает (отрицательный) скачок гидравлического давления/выравнивание давления, которое продолжается в телескопической стреле и отражается, чтобы затем вернуться к клапану. Гидравлический клапан предпочтительно выполнен в форме клапана последовательного управления в телескопических стрелах с последовательным управлением, при этом обычно могут использоваться пропорциональные клапаны и/или черно-белые (двухпозиционные) клапаны. Разность давлений при скачке давления может использоваться для определения оставшейся длины не выдвинутых телескопических стрел и, следовательно, виртуальной длины выдвижения, например, по текущему положению телескопических секций. Текущая ситуация является однозначной, особенно в отношении телескопических стрел с последовательным управлением. Могут быть приняты во внимание такие зависимости, как разница давлений, время закрытия/открытия клапанов или изменения плотности/скорости гидравлического масла. Скачок давления можно измерить с помощью датчика давления, благодаря чему виртуальную длину выдвижения можно рассчитать в абсолютном выражении особенно эффективно.
Значения качества/классы качества и вес могут быть определены на основе скоростей и объемных расходов гидравлического масла в телескопической секции, использования механизмов последовательного управления, температуры и/или давления гидравлического масла.
Кроме того, предпочтительно предусмотрено, что по меньшей мере одна телескопическая секция содержит гидравлический приводной блок с цилиндропоршневым блоком, причем по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком определяют по меньшей мере один параметр в виде экстремального значения давления в цилиндропоршневом блоке, предпочтительно с помощью физической модели.
Здесь датчик измеряет, например, существующее в данный момент значение давления в качестве сигнала датчика, при этом экстремальное значение может быть определено в виде производной величины в виде параметра с использованием физической модели. Здесь физическая модель может использоваться для исследования кривой давления на наличие разрывов и/или в отношении градиентов давления, которые могут быть определены причинно-следственной связью, например, когда телескопическое движение перемещается от одной телескопической секции к другой телескопической секции.
Переход от одной телескопической секции к следующей приводит к торможению или ускорению задействованных телескопических секций, при этом на короткое время возникают типичные пики давления и/или провалы давления из-за инерции массы и гидравлических эффектов, таких как дросселирование или срабатывание клапанов последовательного управления, которые можно измерить, например, непосредственно в одной линии подачи телескопической секции. Также возможно использование существующих датчиков давления. Для определения виртуальной длины выдвижения требуется особенно небольшое количество параметров, так как, например, для расчета не требуется опорная точка. Класс качества/значение качества может зависеть от четкости кривой давления, градиентов давления, вязкости гидравлического масла, температуры, количества предыдущих переходов, скорости выдвижения и подобного.
Кроме того, предпочтительно предусмотрено, что по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком определяют по меньшей мере один параметр в виде подъемного момента, предпочтительно с помощью физической модели.
Здесь датчик измеряет, например, давление, а подъемный момент можно определить с помощью физической модели как параметр в виде производной величины для расчета виртуальной длины выдвижения (через геометрические зависимости).
Благодаря различным кривым момента для собственных моментов и/или моментов груза виртуальная длина выдвижения может быть вычислена особенно эффективно, когда известно угловое положение телескопической стрелы. Текущий подъемный момент можно откорректировать с учетом собственного момента. Особенно предпочтительно подъемный момент корректируется с учетом собственного момента, если момент груза известен и/или был определен, например, посредством анализа деформации (например, прогиба и/или на основе прогиба по меньшей мере части грузоподъемного устройства). Например, момент груза может быть определен на основе изменений подъемного момента в сочетании с характеристиками движения грузоподъемного устройства (обнаружение типичных процессов подъема и опускания во время движения и маневрирования массы груза и/или обнаружение типичных рабочих циклов), при этом собственный момент определяется путем уменьшения подъемного момента на момент груза, чтобы определить длины выдвижения через собственный момент косвенно из виртуальной длины выдвижения. Эта физическая модель отличается особой точностью, может использоваться как для динамических, так и для статических нагрузок на грузоподъемное устройство, не требует каких-либо дополнительных датчиков и может быть особенно гибко использована для различных конструкций/выполнений грузоподъемных устройств, при этом значения качества/классы качества зависят от углового положения, прогибов, массы груза, гистерезисного трение уплотнения подъемных цилиндров и тому подобное.
Кроме того, предпочтительно предусмотрено, что по меньшей мере одна телескопическая секция содержит ролик для направления троса, при этом по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком определяют по меньшей мере один параметр в виде скорости вращения ролика для направления троса. Косвенное определение движения тросового барабана предпочтительно используется, если для определения скорости вращения тросовой лебедки не доступен отдельный датчик, такой как датчик вращения, при этом в случае датчика вращения также можно определить оставшуюся длину троса, что имеет значение для определения количества слоев троса на тросовом барабане, чтобы можно было определить изменение длины торса по скорости тросовой лебедки (по диаметру размотки).
В роликовую головку может быть встроена система датчиков, которая определяет вращательное движение ролика для направления троса, благодаря чему можно обратно рассчитать изменение длины. Система датчиков может быть выполнена в виде инкрементального энкодера. Если управление происходит параллельно телескопической секции, необходимо компенсировать изменение длины троса, например, можно использовать модель объемного расхода для гидравлического двигателя тросовой лебедки и/или характеристики управления направляющими салазками. Например, датчик вращения может определить оставшуюся длину троса.
Грузовой трос преобразуется в трос для непрямого измерения при условии, что вращение тросового барабана компенсируется и может эффективно и непрерывно обеспечивать сведения о длине выдвижения. Эффекты, снижающие качество, такие как провисание троса или неточности при параллельной работе с телескопическими движениями, могут быть учтены в весе и/или в классах качества/значениях качества.
В дополнительном варианте осуществления изобретения может быть предусмотрено, что из множества виртуальных длин выдвижения вручную или автоматически, предпочтительно на основе истории по меньшей мере одной виртуальной длины выдвижения, выбирают по меньшей мере одну, предпочтительно ровно одну, виртуальную длину выдвижения и используют в качестве первой виртуальной длины выдвижения или в качестве по меньшей мере одной дополнительной виртуальной длины выдвижения.
Согласно предпочтительному варианту осуществления изобретения предусмотрено, что первую виртуальную длину выдвижения и/или по меньшей мере одну дополнительную виртуальную длину выдвижения взвешивают, и выбранная виртуальная длина выдвижения является длиной с наибольшим весом, и/или первую виртуальную длину выдвижения и/или по меньшей мере одну дополнительную виртуальную длину выдвижения классифицируют по классам качества и/или по значению качества, и выбранная виртуальная длина выдвижения является длиной с наивысшим классом качества и/или наивысшим значением качества.
Это позволяет определять длину выдвижения с использованием надежных виртуальных длин выдвижения и, при необходимости, исключать или учитывать в ограниченной степени виртуальные длины выдвижения с меньшим весом, классом качества и/или значением качества.
Согласно предпочтительному варианту осуществления изобретения предусмотрено, что множество виртуальных длин выдвижения, предпочтительно для минимизации при необходимости имеющейся области ошибок объединяются для определения длины выдвижения, при этом предпочтительно предусмотрено, что первая виртуальная длина выдвижения и/или по меньшей мере одна дополнительная виртуальная длина выдвижения взвешивается, и множество виртуальных длин выдвижения объединяются с учетом соответствующего веса, и/или первую виртуальную длину выдвижения и/или по меньшей мере одну дополнительную виртуальную длину выдвижения классифицируют по классам качества и/или по значению качества, и множество виртуальных длин выдвижения объединяют с учетом соответствующего класса качества и/или значение качества.
Чем больше виртуальных длин выдвижения используется для определения длины выдвижения, тем точнее можно определить длину выдвижения и статистически уменьшить область ошибок длины выдвижения. Однако, как правило, выбор также может быть сделан из множества виртуальных длин выдвижения, причем предпочтение отдается использованию виртуальных длин выдвижения с более высокими классами качества и/или весами для расчета ровно одной длины выдвижения.
Предпочтительный вариант заключается в том, что предусматривают по меньшей мере одно опорное значение длины выдвижения, предпочтительно известной длины выдвижения и/или длины выдвижения, определенной прямо или косвенно дополнительным датчиком, в котором по меньшей мере одна первая виртуальная длина выдвижения, по меньшей мере одна дополнительная виртуальная длина выдвижения и/или длина выдвижения, предпочтительно дискретно или непрерывно во времени, заменяется по меньшей мере одним опорным значением или приближается по меньшей мере к одному опорному значению, при этом предпочтительно предусмотрено, что по меньшей мере одно опорное значение задается конечным положением по меньшей мере одной телескопической секции и/или телескопической стрелы.
Поскольку непрерывный ход может быть существенным для дальнейшего использования длины выдвижения, замена относительно длины выдвижения в данном контексте означает непрерывный переход в направлении опорного значения в качестве коррекции длины выдвижения.
По меньшей мере одно опорное значение может быть определено, например, на основе датчика (например, обнаружения рабочего состояния, например, все телескопические секции втянуты) и/или неявного определения (например, обнаружения транспортного положения грузоподъемного устройства, например, на основе геометрии или датчика транспортного положения). Другим примером по меньшей мере одного опорного значения является процесс переключения датчика положения переключения, который обнаруживает конкретную телескопическую секцию, например, для ограничения или увеличения подъемного момента и для обеспечения того, чтобы определенный вынос не был превышен.
Особенно предпочтительно, если одно опорное значение представлено в форме виртуальной длины выдвижения, причем виртуальную длину выдвижения определяют дискретно во времени по меньшей мере одним первым датчиком или по меньшей мере одним дополнительным датчиком.
В одном примерном варианте осуществления изобретения предусмотрено, что по меньшей мере одну первую виртуальную длину выдвижения определяют дискретно во времени, а по меньшей мере одну дополнительную виртуальную длину выдвижения определяют непрерывно во времени, или наоборот, причем предпочтительно непрерывно или дискретно во времени, разность между двумя виртуальными длинами выдвижения рассчитывают и сохраняют в буфере устройства управления и/или регулирования.
Буферные и/или опорные значения служат для повышения точности длины выдвижения во время работы грузоподъемного устройства.
Согласно предпочтительному варианту осуществления изобретения предусмотрено, что
- взвешивают разницу, предпочтительно при помощи при необходимости имеющихся классов качества, значения качества и/или веса двух виртуальных длин выдвижения и/или
- виртуальную длину выдвижения, определенную непрерывно и/или дискретно во времени, корректируют при помощи буфера или части буфера, предпочтительно с учетом ограничивающих параметров и/или буфера.
Коррекция виртуальной длины выдвижения особенно предпочтительно осуществляется непрерывно, так что длина выдвижения также постоянно доступна.
Виртуальные длины выдвижения и/или длина выдвижения могут подстраиваться динамически во время работы грузоподъемного устройства, предпочтительно телескопической стрелы, путем компенсации температуры, вязкости и износа и, при необходимости, с учетом значений буфера, причем значение буфера предпочтительно постепенно снижается до 0. Предпочтительно, когда телескопическое движение прекращается, буфер обнуляется, при этом длина выдвижения и/или виртуальные длины выдвижения окончательно адаптируются так, что при повторении телескопического движения остается пустой буфер, который затем можно снова заполнить за счет разницы в виртуальных длинах выдвижения, чтобы обеспечить постоянство и иметь возможность генерировать точный сигнал с учетом различных виртуальных длин выдвижения.
Предпочтительно можно осуществлять калибровку, которая не обязательно связана с буфером, при этом рабочие параметры, влияющие величины и/или параметры могут быть адаптированы, предпочтительно динамически, для регулировки во время работы грузоподъемного устройства.
Калибровка может быть выполнена, например, посредством процесса регулировки, процесса тестирования и т.п., предпочтительно перед эксплуатацией грузоподъемного устройства. Адаптация, отдельная от калибровки, может, например, представлять собой, предпочтительно динамическую, регулировку параметров и/или рабочих параметров, предпочтительно во время работы грузоподъемного устройства, например, для, в частности, постоянной компенсации износа. Калибровка и адаптация, как правило, могут изменять параметры и/или рабочие параметры, которые могут быть связаны с калибровкой и/или адаптацией.
Оказалось предпочтительным, что при помощи длины выдвижения по меньшей мере телескопической секции устанавливают и/или определяют длину выдвижения части телескопической стрелы или длину выдвижения телескопической стрелы.
Например, множество длин выдвижения отдельных телескопических секций может быть суммировано для получения общей длины телескопических секций, хотя также возможно, что длина выдвижения отдельных телескопических секций уже известна. Например, в грузоподъемном устройстве можно дополнительно использовать механические удлинители, которые имеют известную длину выдвижения.
Согласно предпочтительному варианту осуществления изобретения предусмотрено, что предусмотрен по меньшей мере один блок памяти, который находится в соединении для передачи данных по меньшей мере с одним устройством управления и/или регулирования или может быть переведен в него, при этом по меньшей мере в один блок памяти заложен по меньшей мере один алгоритм для, предпочтительно дискретно или непрерывно во времени, определения и/или расчета длины выдвижения по меньшей мере через первую виртуальную длину выдвижения и по меньшей мере одну дополнительную виртуальную длину выдвижения, причем предпочтительно предусмотрено, что
- посредством алгоритма по меньшей мере одной первой виртуальной длине выдвижения, по меньшей мере одной дополнительной виртуальной длине выдвижения и/или длине выдвижения присваивается класс качества, значение качества и/или вес, и/или
- буфер может быть заполнен при помощи алгоритма посредством разницы между по меньшей мере одной первой виртуальной длиной выдвижения и по меньшей мере одной дополнительной виртуальной длиной выдвижения, при этом при помощи буфера длина выдвижения и/или непрерывная во времени виртуальная длина выдвижения может подстраиваться при помощи опорных значений или дискретных по времени виртуальных длин выдвижения, и/или
- предусмотрено по меньшей мере одно устройство визуализации, с помощью которого можно визуализировать по меньшей мере одну первую виртуальную длину выдвижения, по меньшей мере одну дополнительную виртуальную длину выдвижения и/или длину выдвижения.
Виртуальные длины выдвижения и/или длина выдвижения могут использоваться для дальнейших расчетов и/или для применения к функциям грузоподъемного устройства, таким как функции комфорта.
Признаки пунктов, относящихся к способу, применимы и в отношении устройства, и наоборот.
Дополнительные детали и преимущества настоящего изобретения поясняются более подробно далее на основе описания чертежа со ссылкой на примерные варианты осуществления, показанные на чертеже.
Показано:
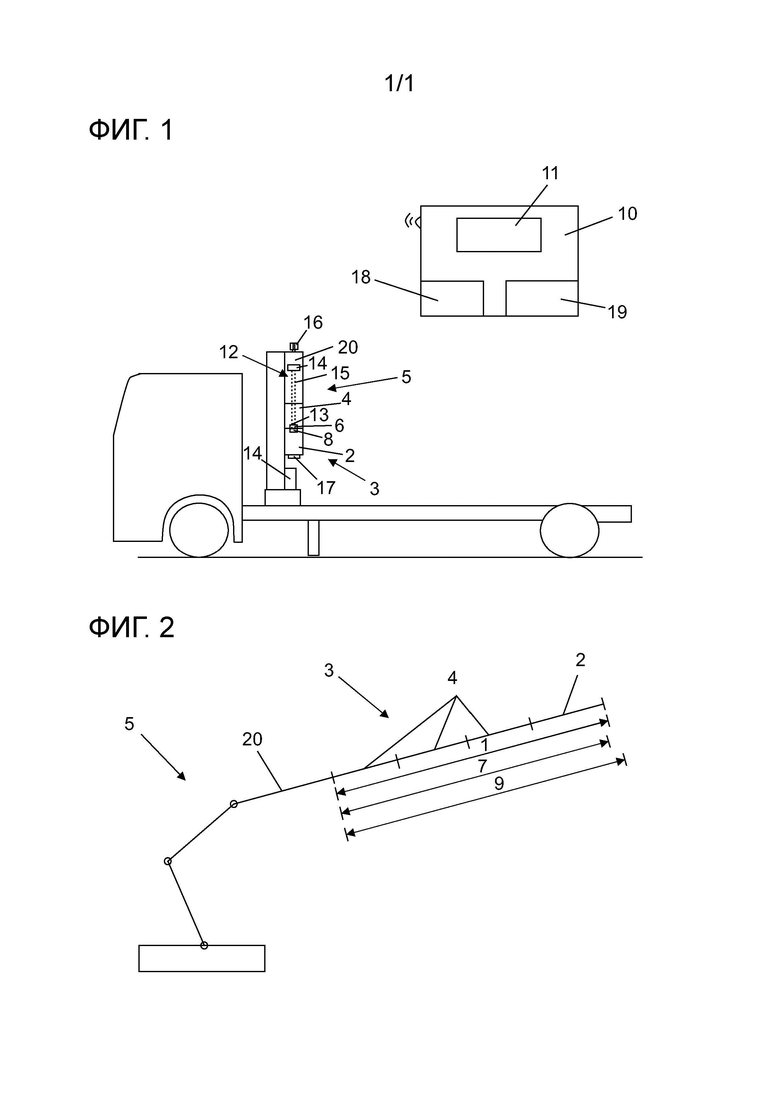
Фиг. 1 - грузоподъемное устройство согласно предпочтительному примерному варианту осуществления способа непрямого определения длины выдвижения, схематически показанное на виде сбоку,
Фиг. 2 - схематически показано грузоподъемное устройство для иллюстрации виртуальных длин выдвижения и длины выдвижения телескопической стрелы, определенной способом непрямого определения длины выдвижения.
На фиг. 1 показано грузоподъемное устройство 5, содержащее телескопическую секцию 2 телескопической стрелы 3, первый датчик 6, который не представляет собой датчик прямого измерения длины выдвижения, и дополнительный датчик 8, который не является датчиком прямого измерения длины выдвижения, причем дополнительный датчик 8 не является обязательным, при условии, что первый датчик 6 из сигналов датчика предоставляет параметры по меньшей мере для двух виртуальных длин 7, 9 выдвижения на основе различных физических моделей. Однако, различные физические модели могут, например, относиться к характеристикам потока или давления гидравлического масла. Расположение и конструкция первого датчика 6 и дополнительного датчика 8, как правило, являются произвольными.
Грузоподъемное устройство 5 содержит устройство 10 управления и/или регулирования, которое находится в соединении для передачи данных с грузоподъемным устройством 5, при этом соединение может быть проводным или предназначено для передачи радиосигналов.
Устройство 10 управления и/или регулирования предназначено для выполнения способа непрямого определения длины 1 выдвижения. Для этой цели используется компьютерный программный продукт, который включает в себя инструкции, которые при выполнении вычислительным блоком 18 побуждают его выполнять способ, из блока 19 памяти, который находится в соединении для передачи данных с вычислительным блоком 18 или может быть переведен в такое состояние.
В блоке 19 памяти, который находится в соединении для передачи данных с устройством 10 управления и/или регулирования, заложен алгоритм дискретного и/или непрерывного во времени определения длины 1 выдвижения через первую виртуальную длину 7 выдвижения и дополнительную виртуальную длину 9 выдвижения, причем количество дополнительных виртуальных длин 9 выдвижения как правило является произвольным. Алгоритм позволяет снабдить первую виртуальную длину 7 выдвижения, дополнительную виртуальную длину выдвижения 9 и длину 1 выдвижения классом качества, значением качества и весом. Алгоритм позволяет заполнять буфер посредством разницы между первой виртуальной длиной 7 выдвижения и дополнительной виртуальной длиной 9 выдвижения, при этом длина 1 выдвижения и непрерывная во времени виртуальная длина 7, 9 выдвижения подстраиваются через буфер с помощью опорных значений или дискретной по времени виртуальной длины 7, 9 выдвижения. Предусмотрено устройство 11 визуализации, с помощью которого можно визуализировать первую виртуальную длину 7 выдвижения, дополнительную виртуальную длину 9 выдвижения и длину 1 выдвижения.
Способ непрямого определения длины 1 выдвижения телескопической секции 2 телескопической стрелы 3 относительно другой телескопической секции 4 или основной секции 20 в качестве шарнирной стрелы или стрелы крана телескопической стрелы 3 или части стрелы телескопическая стрела 3 может быть выполнен следующим образом:
- первый датчик 6 определяет первый параметр телескопической секции 2 в течение интервала времени, при этом первая виртуальная длина 7 выдвижения рассчитывается с использованием первого параметра с использованием физической модели,
- дополнительный датчик 8 определяет дополнительный параметр телескопической секции 2 в течение интервала времени, при этом дополнительная виртуальная длина выдвижения 9 рассчитывается с использованием дополнительного параметра с использованием физической модели,
- длина 1 выдвижения телескопической стрелы 3 рассчитывается на основе первой виртуальной длины 7 выдвижения и дополнительной виртуальной длины выдвижения 9.
Первая виртуальная длина 7 выдвижения и дополнительная виртуальная длина 9 выдвижения взвешиваются, при этом вес
- имеет форму заранее определенного статического весового значения и
- определяется посредством истории первой виртуальной длины 7 выдвижения и дополнительной виртуальной длины 9 выдвижения, и
- может быть рассчитано посредством статистической оценки первой виртуальной длины 7 выдвижения и дополнительной виртуальной длины 9 выдвижения, причем вес может быть изменен в зависимости от параметров взвешивания, класса качества или значения качества первой виртуальной длины 7 выдвижения и дополнительной виртуальной длины 9 выдвижения.
В этом случае в весе учитываются следующие критерии: тип грузоподъемного устройства, вариант исполнения телескопической стрелы 3, количество телескопических секций 2 и телескопических стрел 3, тип первого датчика 6 и дополнительного датчика 8, вид первого параметра и дополнительного параметра, количество используемых параметров, текущее рабочее положение телескопической стрелы 3, требования к длине 1 выдвижения, целевое использование длины 1 выдвижения, рабочие параметры грузоподъемного устройства 5. Вес динамически подстраивается во время работы грузоподъемного устройства 5 или телескопической стрелы 3 в каждом цикле сканирования мобильного устройства 10 управления и/или регулирования.
Первая виртуальная длина 7 выдвижения и дополнительная виртуальная длина 9 выдвижения классифицируются по классам качества или по значению качества, при этом определяют класс качества и значение качества длины 1 выдвижения. Класс качества и значение качества подстраивают динамически в каждом цикле сканирования мобильного устройства 10 управления и/или регулирования во время работы грузоподъемного устройства 5 или телескопической стрелы 3, при этом класс качества и значение качества
- первой виртуальной длины 7 выдвижения и дополнительной виртуальной длины 9 выдвижения подстраивают в зависимости от следующих критериев: рабочего положения телескопической стрелы 3, веса, истории движения грузоподъемного устройства, продолжительности телескопического движения, дальнейших движений грузоподъемного устройства, параметров работы грузоподъемного устройства 5,
- длину 1 выдвижения подстраивают в зависимости от класса качества или значения качества первой виртуальной длины 7 выдвижения и класса качества или значения качества дополнительной виртуальной длины 9 выдвижения.
Область ошибок с учетом веса рассчитывается для первой виртуальной длины 7 выдвижения, дополнительной виртуальной длины 9 выдвижения и длины 1 выдвижения. Первая виртуальная длина 7 выдвижения, дополнительная виртуальная длина 9 выдвижения и длина 1 выдвижения вместе с областью ошибок визуализируются посредством устройства 11 визуализации. Первая виртуальная длина 7 выдвижения, дополнительная виртуальная длина 9 выдвижения и длина 1 выдвижения определяются непрерывно или дискретно во времени в зависимости от положенного в основу параметра или физической модели, при этом длину 1 выдвижения ни в каком рабочем цикле грузоподъемного устройства 5 не рассчитывают исключительно через первую виртуальную длину 7 выдвижения 7.
Первая виртуальная длина 7 выдвижения, дополнительная виртуальная длина 9 выдвижения и длина 1 выдвижения рассчитываются с учетом следующих дополнительных параметров: геометрия телескопической стрелы, геометрия грузоподъемного устройства, рабочее положение телескопической стрелы 3, масса груза, расположенного на телескопической стреле 3, рабочий параметр грузоподъемного устройства 5, история движения грузоподъемного устройства, текущее движение грузоподъемного устройства, рабочие состояния гидропотребителей грузоподъемного устройства 5, продолжительность телескопического движения. Однако выбор дополнительных параметров, как правило, произволен.
Телескопическая секция 2 имеет гидравлический приводной блок 12 с заслонкой 13 в виде управляющего стержня, причем заслонка 13 имеет множество положений заслонки для управления потоком гидравлического масла в гидравлическом приводном блоке 12. Параметр может быть определен в виде текущего положения заслонки первым датчиком 6 (или дополнительным датчиком 8, в дальнейшем ссылка будет сделана только на первый датчик 6), при этом при помощи этого параметра через физическую модель выводится объемный расход в гидравлическом приводном блоке 12.
Поскольку грузоподъемное устройство оснащено позиционно-зависимой заслонкой 13, поток гидравлического масла в гидравлическом приводном блоке 12 можно контролировать при помощи заслонки 13, при этом первый датчик 6 определяет параметры в виде положения заслонки 13 и перепад давления на заслонке 13, при этом параметры используются для определения объемного расхода в гидравлическом приводном блоке 12 посредством физической модели для расчета первой виртуальной длины 7 выдвижения.
Гидравлический приводной блок 12 содержит масляный бак 14 гидросистемы для снабжения гидравлического приводного блока 12 гидравлическим маслом, причем параметр в виде уровня заполнения масляного бака 14 гидросистемы определяется первым датчиком 6. Дополнительные гидравлические приводные блоки 12, соединенные с масляным баком 14 гидросистемы (не показаны на чертеже для ясности), могут быть учтены с использованием физической модели 12. Обычно только один масляный бак 14 гидросистемы расположен рядом с колонной крана для снабжения гидросистемы, при этом масляный бак 14 гидросистемы, примыкающий к цилиндропоршневому блоку 15, в примерном варианте осуществления может быть исключен.
Гидравлический приводной блок 12 грузоподъемного устройства 5 имеет цилиндропоршневым блок 15, причем первый датчик 6 через физическую модель определяет параметр в виде собственной частоты телескопической стрелы 3 на цилиндропоршневом блоке 15.
Посредством первого датчика 6 параметр в виде амплитуды колебаний телескопической стрелы 3 на цилиндропоршневом блоке 15 может быть определен при помощи физической модели. Первый датчик 6 как правило может иметь большое количество сенсорных модулей. Количество датчиков 6, 8 как правило является произвольным и может быть согласовано с конкретными определяемыми параметрами.
Параметр в виде экстремального значения давления в цилиндропоршневом блоке 15 определяется посредством первого датчика 6 с использованием положенной в основу физической модели для определения экстремального значения. Физическая модель также позволяет определить с учетом этого параметра дополнительную виртуальную длину 9 выдвижения.
Первый датчик 6 при помощи физической модели определяет параметр в виде подъемного момента с расчетом моментов груза и собственных моментов для определения длины 1 выдвижения.
Телескопическая стрела 3 включает в себя ролик 16 для направления троса, причем параметр в виде скорости вращения ролика 16 для направления троса определяется первым датчиком 6, при этом скорость вращения используется как функция любых телескопических движений для расчета дополнительной виртуальной длины 9 выдвижения.
Показанное грузоподъемное устройство 5 способно генерировать виртуальные длины 7, 9 выдвижения со всеми семью описанными положенными в основу физическими моделями, при этом грузоподъемное устройство 5 не ограничено количеством или типом физических моделей. Например, грузоподъемные устройства 5 могут использовать только две физические модели для непрямого определения длины 1 выдвижения через две виртуальные длины 7, 9 выдвижения, при этом используемая для этого система датчиков также может быть рассчитана только на эти используемые виртуальные длины 7, 9 выдвижения.
На фиг. 2 показано грузоподъемное устройство 5 в виде крана с основанием крана, содержащим шарнирную систему, на которой расположена основная стрела 20 в виде шарнирной стрелы или стрелы крана. Большое количество телескопических секций 2, 4 можно выдвигать из основной секции 20, при этом длина 1 выдвижения и виртуальные длины 7, 9 выдвижения как правило также могут быть связаны с участком телескопической стрелы 3. Длина 1 выдвижения отдельных телескопических секций 2 телескопической стрелы 3 может быть использована для определения длины 1 выдвижения части телескопической стрелы 3 и длины 1 выдвижения всей телескопической стрелы 3 при условии предоставления информации о доступных других телескопических секциях 4.
На основе истории виртуальной длины 7, 9 выдвижения автоматически выбирается ровно одна виртуальная длина 7, 9 выдвижения из множества виртуальных длин 7 выдвижения и используется в качестве первой виртуальной длины 7 выдвижения. Первая виртуальная длина 7 выдвижения и дополнительная виртуальная длина 9 выдвижения (для ясности на фигуре показана только одна дополнительная виртуальная длина 9 выдвижения) взвешиваются и классифицируются, и выбирается виртуальная длина 7, 9 выдвижения с самым высоким весом или самым высоким классом качества/значением качества. Этот выбор также может быть применен к части области виртуальных длин 7, 9 выдвижения. Чтобы минимизировать область ошибок, для определения длины 1 выдвижения объединяется множество виртуальных длин 7, 9 выдвижения, при этом первая виртуальная длина 7 выдвижения и дополнительные виртуальные длины 9 выдвижения взвешиваются, и множество виртуальных длин 7, 9 выдвижения объединяются с учетом соответствующего веса. Первая виртуальная длина 7 выдвижения и дополнительная виртуальная длина 9 выдвижения классифицируются по классам качества и по значению качества, и множество виртуальных длин 7, 9 выдвижения объединяются с учетом соответствующего класса качества и значения качества.
Предусмотрено, что опорные значение в виде длины 1 выдвижения известной длины 1 выдвижения и длины 1 выдвижения, определенной дополнительным датчиком 17, с помощью которых первая виртуальная длина 7 выдвижения, дополнительная виртуальная длина выдвижения 9 и длина 1 выдвижения непрерывно во времени аппроксимируются к опорным значениям, при этом опорное значение задается конечным положением телескопической стрелы 3. Опорное значение имеет форму виртуальной длины 7 выдвижения, причем эта виртуальная длина 7 выдвижения определяется дискретно во времени первым датчиком 6.
С другой стороны, дополнительная виртуальная длина 9 выдвижения определяется непрерывно во времени, при этом разница между двумя виртуальными длинами 7, 9 выдвижения рассчитывается и сохраняется в буфере устройства 10 управления и/или регулирования. Разницу можно взвесить с помощью классов качества, значений качества и веса двух виртуальных длин 7, 9 выдвижения. Виртуальная длина 7, 9 выдвижения, которая определяется непрерывно, корректируется буфером с учетом ограничивающих параметров, таких как максимальное изменение скорости, результаты расчета предыдущих телескопических движений в качестве граничных условий и подобного.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМИЗИРОВАННОГО УПРАВЛЕНИЯ ВЫДВИЖЕНИЕМ/ВТЯГИВАНИЕМ ОДНОЦИЛИНДРОВОЙ ШРИФТОВОЙ ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛЫ И ЕЁ СИСТЕМА УПРАВЛЕНИЯ | 2010 |
|
RU2507146C2 |
| Моделирующее устройство для телескопических погрузчиков | 2021 |
|
RU2831614C2 |
| УСТРОЙСТВО И СПОСОБ КОМПЕНСАЦИИ ТЕРМИЧЕСКОГО СЖАТИЯ РАБОЧЕЙ ЖИДКОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ | 2010 |
|
RU2423313C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ И ЗАЩИТЫ ТЕЛЕСКОПИЧЕСКОГО ГИДРАВЛИЧЕСКОГО ЦИЛИНДРА ПОДЪЕМНОГО КРАНА | 2014 |
|
RU2664030C1 |
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА КРАНА | 1991 |
|
RU2025456C1 |
| ОДНОЦИЛИНДРОВАЯ ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА СО ВСТАВНЫМИ ШТИФТАМИ, СПОСОБ ЕЕ ТЕЛЕСКОПИРОВАНИЯ И КРАН, ИМЕЮЩИЙ ТЕЛЕСКОПИЧЕСКУЮ СТРЕЛУ | 2014 |
|
RU2646710C2 |
| Телескопическая стрела | 1991 |
|
SU1794875A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЛИНЫ ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛЫ | 1997 |
|
RU2128622C1 |
| Телескопическая стрела | 2024 |
|
RU2836067C1 |
| Передвижная мачта освещения телескопического типа | 2022 |
|
RU2795671C1 |
Изобретение относится к телескопическим стрелам для подъемных кранов. Для непрямого определения длины (1) выдвижения по меньшей мере одной телескопической секции (2) телескопической стрелы (3) относительно другой телескопической секции (4) или основной секции (20) телескопической стрелы (3), в частности, по меньшей мере части телескопической стрелы (3), грузоподъемного устройства (5) используют по меньшей мере один первый датчик (6), который определяет по меньшей мере один первый параметр по меньшей мере одной телескопической секции (2) и/или телескопической стрелы (3). Посредством по меньшей мере одного первого параметра определяют и/или рассчитывают первую виртуальную длину (7) выдвижения. По меньшей мере один первый датчик (6) и/или по меньшей мере один дополнительный датчик (8) определяет по меньшей мере один дополнительный параметр по меньшей мере одной телескопической секции (2) и/или телескопической стрелы (3), в частности в течение интервала времени. Посредством по меньшей мере одного дополнительного параметра определяют и/или рассчитывают по меньшей мере одну дополнительную виртуальную длину (9) выдвижения, длину выдвижения (1) по меньшей мере одной телескопической секции (2) или телескопической стрелы (3) определяют и/или рассчитывают по первой виртуальной длине (7) выдвижения и по меньшей мере одной дополнительной виртуальной длине (9) выдвижения. Достигается точное или надежное значение длины выдвижения для сложных функций комфорта без необходимости измерительных тросов. 3 н. и 27 з.п. ф-лы, 2 ил.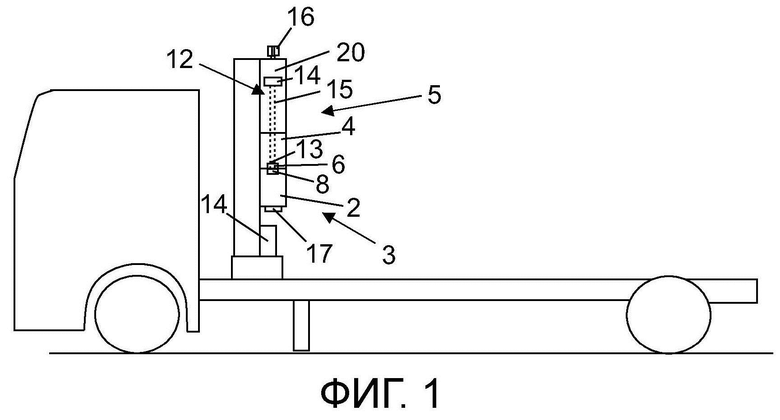
1. Способ непрямого определения длины (1) выдвижения по меньшей мере одной телескопической секции (2) телескопической стрелы (3) относительно другой телескопической секции (4) или основной секции (20) телескопической стрелы (3), в частности, по меньшей мере части телескопической стрелы (3), грузоподъемного устройства (5), отличающийся следующими этапами:
- по меньшей мере один первый датчик (6), который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, определяет по меньшей мере один первый параметр по меньшей мере одной телескопической секции (2) и/или телескопической стрелы (3), в частности в течение интервала времени, при этом посредством по меньшей мере одного первого параметра, предпочтительно посредством физической модели, определяют и/или рассчитывают первую виртуальную длину (7) выдвижения,
- по меньшей мере один первый датчик (6) и/или по меньшей мере один дополнительный датчик (8), который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, определяет по меньшей мере один дополнительный параметр по меньшей мере одной телескопической секции (2) и/или телескопической стрелы (3), в частности в течение интервала времени, причем посредством по меньшей мере одного дополнительного параметра, предпочтительно с помощью физической модели, определяют и/или рассчитывают по меньшей мере одну дополнительную виртуальную длину (9) выдвижения,
- длину выдвижения (1) по меньшей мере одной телескопической секции (2) или телескопической стрелы (3) определяют и/или рассчитывают по первой виртуальной длине (7) выдвижения и по меньшей мере одной дополнительной виртуальной длине (9) выдвижения.
2. Способ по п.1, в котором взвешивают первую виртуальную длину (7) выдвижения и/или по меньшей мере одну дополнительную виртуальную длину (9) выдвижения, предпочтительно при этом вес
- имеет форму заранее определенной статической весовой величины, и/или
- определяют и/или рассчитывают посредством истории первой виртуальной длины (7) выдвижения и/или по меньшей мере одной дополнительной виртуальной длины (9) выдвижения, и/или
- определяют и/или рассчитывают путем статистической оценки первой виртуальной длины (7) выдвижения и/или по меньшей мере одной дополнительной виртуальной длины (9) выдвижения, и/или
- определяют и/или рассчитывают в зависимости от класса качества и/или значения качества первой виртуальной длины (7) выдвижения и/или по меньшей мере одной дополнительной виртуальной длины (9) выдвижения, и/или
- определяют и/или рассчитывают в зависимости от предварительно определенного и/или определяемого весового параметра.
3. Способ по п.2, в котором в весе учитывают по меньшей мере один из следующих критериев: тип грузоподъемного устройства, вариант исполнения телескопической стрелы (3), количество телескопических секций (2) и/или телескопических стрел (3), тип по меньшей мере одного первого датчика (6) и/или по меньшей мере одного дополнительного датчика (8), тип по меньшей мере одного первого параметра и/или по меньшей мере одного дополнительного параметра, количество используемых параметров, текущее рабочее положение телескопической стрелы (3), требования к длине (1) выдвижения, планируемое использование длины (1) выдвижения, рабочие параметры грузоподъемного устройства (5).
4. Способ по п.2 или 3, в котором вес подстраивают во время работы грузоподъемного устройства (5), предпочтительно телескопической стрелы (3) и/или динамически в каждом цикле сканирования, предпочтительно мобильного устройства (10) управления и/или регулирования.
5. Способ по любому из предыдущих пунктов, в котором первую виртуальную длину (7) выдвижения и/или по меньшей мере одну дополнительную виртуальную длину (9) выдвижения классифицируют предпочтительно по классам качества и/или по значению качества, предпочтительно при условии, что класс качества и/или значение качества длины (1) выдвижения определяют и/или рассчитывают.
6. Способ по п.5, в котором подстраивают класс качества и/или значение качества при работе грузоподъемного устройства (5), предпочтительно телескопической стрелы (3), и/или динамически в каждом цикле сканирования, предпочтительно мобильного устройства (10) управления и/или регулирования, причем предпочтительно предусмотрено, что класс качества и/или значение качества
- первой виртуальной длины (7) выдвижения и/или по меньшей мере одной дополнительной виртуальной длины (9) выдвижения подстраивают в зависимости по меньшей мере от одного из следующих критериев: рабочее положение телескопической стрелы (3), при необходимости имеющийся вес, история движения грузоподъемного устройства, продолжительность телескопического движения, дальнейшие движения грузоподъемного устройства, рабочие параметры грузоподъемного устройства (5) и/или
- длины (1) выдвижения подстраивают в зависимости, предпочтительно, от класса качества и/или значения качества, первой виртуальной длины (7) выдвижения и/или, предпочтительно, от класса качества и/или значения качества, по меньшей мере одной дополнительной виртуальной длины (9) выдвижения.
7. Способ по любому из предыдущих пунктов, в котором по меньшей мере одну область ошибок определяют и/или рассчитывают предпочтительно с учетом имеющегося при необходимости веса для первой виртуальной длины (7) выдвижения, по меньшей мере одной дополнительной виртуальной длины (9) выдвижения и/или длины (1) выдвижения (1).
8. Способ по любому из предыдущих пунктов, в котором первую виртуальную длину (7) выдвижения, по меньшей мере одну дополнительную виртуальную длину (9) выдвижения и/или длину (1) выдвижения, предпочтительно вместе с имеющейся при необходимости по меньшей мере одной областью ошибок, визуализируют с помощью устройства (11) визуализации.
9. Способ по любому из предыдущих пунктов, в котором первую виртуальную длину (7) выдвижения, по меньшей мере одну дополнительную виртуальную длину (9) выдвижения и/или длину (1) выдвижения определяют и/или рассчитывают по существу непрерывно или дискретно во времени.
10. Способ по любому из предыдущих пунктов, в котором длину (1) выдвижения ни в каком рабочем цикле грузоподъемного устройства (5) и/или ни в какой момент времени не определяют и/или не рассчитывают исключительно через первую виртуальную длину (7) выдвижения (7).
11. Способ по любому из предыдущих пунктов, в котором первую виртуальную длину (7) выдвижения, по меньшей мере одну дополнительную виртуальную длину (9) выдвижения и/или длину (1) выдвижения определяют и/или рассчитывают с учетом по меньшей мере одного дополнительного параметра, предпочтительно по меньшей мере одного из следующих дополнительных параметров: геометрия телескопической стрелы, геометрия грузоподъемного устройства, рабочее положение телескопической стрелы (3), масса груза, расположенного на телескопической стреле (3), рабочий параметр грузоподъемного устройства (5), история движения грузоподъемного устройства, текущее движение грузоподъемного устройства, рабочие состояния гидропотребителей грузоподъемного устройства (5), продолжительность телескопического движения.
12. Способ по любому из предыдущих пунктов, в котором по меньшей мере одна телескопическая секция (2) содержит гидравлический приводной блок (12) по меньшей мере с одной заслонкой (13), при этом по меньшей мере одна заслонка (13) имеет множество положений заслонки для управления потоком гидравлического масла в гидравлическом приводном блоке (12), при этом по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком (6, 8) определяют по меньшей мере один параметр в виде текущего положения заслонки, при этом по меньшей мере через один параметр, предпочтительно с помощью физической модели, делают вывод об объемном расходе в гидравлическом приводном блоке (12).
13. Способ по любому из предыдущих пунктов, в котором по меньшей мере одна телескопическая секция (2) содержит гидравлический приводной блок (12) по меньшей мере с одной позиционно-зависимой заслонкой (13), при этом потоком гидравлического масла в гидравлическом приводном блоке (12) можно управлять посредством по меньшей мере одной заслонки (13), при этом посредством по меньшей мере одного первого или по меньшей мере одного дополнительного датчика (6, 8) определяют по меньшей мере один параметр в виде положения по меньшей мере одной заслонки (13) и/или разницы давлений по меньшей мере на одной заслонке (13), при этом по меньшей мере через один параметр, предпочтительно с помощью физической модели, делают вывод об объемном расходе в гидравлическом приводном блоке (12).
14. Способ по любому из предыдущих пунктов, в котором по меньшей мере одна телескопическая секция (2) содержит гидравлический приводной блок (12) с масляным баком (14) гидросистемы для снабжения гидравлического приводного блока (12) гидравлическим маслом, при этом посредством по меньшей мере одного первого или по меньшей мере одного дополнительного датчика (6, 8) определяют по меньшей мере один параметр в виде уровня заполнения масляного бака (14) гидросистемы, причем предпочтительно предусмотрено, что дополнительные гидравлические приводные блоки (12), соединенные с масляным баком (14) гидросистемы, учитывают предпочтительно с помощью физической модели.
15. Способ по любому из предыдущих пунктов, в котором по меньшей мере одна телескопическая секция (2) содержит гидравлический приводной блок (12) с цилиндропоршневым блоком (15), причем посредством по меньшей мере одного первого или по меньшей мере одного дополнительного датчика (6, 8) определяют по меньшей мере один параметр в виде собственной частоты по меньшей мере одной телескопической секции (2) и/или телескопической стрелы (3) на цилиндропоршневом блоке (15), предпочтительно с помощью физической модели.
16. Способ по любому из предыдущих пунктов, в котором по меньшей мере одна телескопическая секция (2) содержит гидравлический приводной блок (12) с цилиндропоршневым блоком (15), причем по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком (6, 8) определяют по меньшей мере один параметр в виде амплитуды колебаний по меньшей мере одной телескопической секции (2) и/или телескопической стрелы (3) на цилиндропоршневом блоке (15), предпочтительно с помощью физической модели.
17. Способ по любому из предыдущих пунктов, в котором по меньшей мере одна телескопическая секция (2) содержит гидравлический приводной блок (12) с цилиндропоршневым блоком (15), причем по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком (6, 8) определяют по меньшей мере один параметр в виде экстремального значения давления в цилиндропоршневом блоке (15), предпочтительно с помощью физической модели.
18. Способ по любому из предыдущих пунктов, в котором по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком (6, 8) определяют по меньшей мере один параметр в виде подъемного момента, предпочтительно с помощью физической модели.
19. Способ по любому из предыдущих пунктов, в котором по меньшей мере одна телескопическая секция (2) содержит ролик (16) для направления троса, при этом по меньшей мере одним первым или по меньшей мере одним дополнительным датчиком (6, 8) определяют по меньшей мере один параметр в виде скорости вращения ролика (16) для направления троса.
20. Способ по любому из предыдущих пунктов, в котором из множества виртуальных длин (7, 9) выдвижения вручную или автоматически, предпочтительно на основе истории по меньшей мере одной виртуальной длины (7, 9) выдвижения, выбирают по меньшей мере одну, предпочтительно ровно одну, виртуальную длину (7, 9) выдвижения и используют в качестве первой виртуальной длины (7) выдвижения или в качестве по меньшей мере одной дополнительной виртуальной длины (9) выдвижения.
21. Способ по п.20, в котором первую виртуальную длину (7) выдвижения и/или по меньшей мере одну дополнительную виртуальную длину (9) выдвижения взвешивают, и выбранная виртуальная длина (7, 9) выдвижения является длиной с наибольшим весом, и/или первую виртуальную длину (7) выдвижения и/или по меньшей мере одну дополнительную виртуальную длину выдвижения (9) классифицируют по классам качества и/или по значению качества, и выбранная виртуальная длина (7, 9) выдвижения является длиной с наивысшим классом качества и/или наивысшим значением качества.
22. Способ по любому из предшествующих пунктов, в котором множество виртуальных длин (7, 9) выдвижения, предпочтительно для минимизации при необходимости имеющейся области ошибок объединяют для определения длины (1) выдвижения, при этом предпочтительно предусмотрено, что первую виртуальную длину (7) выдвижения и/или по меньшей мере одну дополнительную виртуальную длину выдвижения (9) взвешивают, и множество виртуальных длин (7, 9) выдвижения объединяют с учетом соответствующего веса, и/или первую виртуальную длину (7) выдвижения и/или по меньшей мере одну дополнительную виртуальную длину выдвижения (9) классифицируют по классам качества и/или по значению качества, и множество виртуальных длин (7, 9) выдвижения объединяют с учетом соответствующего класса качества и/или значения качества.
23. Способ по любому из предыдущих пунктов, в котором предусматривают по меньшей мере одно опорное значение длины (1) выдвижения, предпочтительно известной длины (1) выдвижения и/или длины (1) выдвижения, определенной прямо или косвенно дополнительным датчиком (17), в котором по меньшей мере одна первая виртуальная длина (7) выдвижения, по меньшей мере одна дополнительная виртуальная длина выдвижения (9) и/или длина (1) выдвижения, предпочтительно дискретно или непрерывно во времени, заменяется по меньшей мере одним опорным значением или приближается к по меньшей мере одному опорному значению, при этом предпочтительно предусмотрено, что по меньшей мере одно опорное значение задается конечным положением по меньшей мере одной телескопической секции (2) и/или телескопической стрелы (3).
24. Способ по п.23, в котором по меньшей мере одно опорное значение представлено в форме виртуальной длины (7, 9) выдвижения, причем виртуальную длину (7, 9) выдвижения определяют дискретно во времени по меньшей мере одним первым датчиком (6) или по меньшей мере одним дополнительным датчиком (8).
25. Способ по любому из предыдущих пунктов, в котором по меньшей мере одну первую виртуальную длину (7) выдвижения определяют дискретно во времени, а по меньшей мере одну дополнительную виртуальную длину (9) выдвижения определяют непрерывно во времени или наоборот, причем предпочтительно непрерывно или дискретно во времени, разность между двумя виртуальными длинами (7, 9) выдвижения рассчитывают и сохраняют в буфере устройства (10) управления и/или регулирования.
26. Способ по п.25, отличающийся тем, что
- взвешивают разницу, предпочтительно при помощи при необходимости имеющихся классов качества, значений качества и/или веса двух виртуальных длин (7, 9) выдвижения, и/или
- виртуальную длину (7, 9) выдвижения, определенную непрерывно и/или дискретно во времени, корректируют при помощи буфера или части буфера, предпочтительно с учетом ограничивающих параметров и/или буфера.
27. Способ по любому из предыдущих пунктов, в котором при помощи длины (1) выдвижения по меньшей мере телескопической секции (2) устанавливают и/или определяют длину (1) выдвижения части телескопической стрелы (3) или длину (1) выдвижения телескопической стрелы (3).
28. Компьютерный программный продукт, содержащий инструкции, которые при выполнении вычислительным блоком (18) побуждают его из блока (19) памяти, который находится в соединении для передачи данных с вычислительным блоком (18) или может быть переведен в него, выполнять способ согласно по меньшей мере любому из предыдущих пунктов.
29. Грузоподъемное устройство (5), содержащее
- по меньшей мере одну телескопическую секцию (2) и/или по меньшей мере одну телескопическую стрелу (3),
- по меньшей мере один первый датчик (6), который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения,
- при необходимости, по меньшей мере один дополнительный датчик (8), который отличается от имеющегося при необходимости датчика прямого измерения длины выдвижения, и
- по меньшей мере одно устройство (10) управления и/или регулирования,
отличающееся тем, что устройство (10) управления и/или регулирования выполнено для осуществления способа по меньшей мере по любому из пп.1-27.
30. Грузоподъемное устройство (5) по п.29, в котором предусмотрен по меньшей мере один блок (19) памяти, который находится в соединении для передачи данных по меньшей мере с одним устройством (10) управления и/или регулирования или может быть переведен в него,
при этом по меньшей мере в один блок (19) памяти заложен по меньшей мере один алгоритм для определения и/или расчета, предпочтительно дискретно или непрерывно во времени, длины (1) выдвижения по меньшей мере через первую виртуальную длину (7) выдвижения и по меньшей мере одну дополнительную виртуальную длину (9) выдвижения, причем предпочтительно предусмотрено, что
- посредством алгоритма по меньшей мере одной первой виртуальной длине (7) выдвижения, по меньшей мере одной дополнительной виртуальной длине (9) выдвижения и/или длине (1) выдвижения присваивается класс качества, значение качества и/или вес, и/или
- буфер может быть заполнен при помощи алгоритма посредством разницы между по меньшей мере одной первой виртуальной длиной (7) выдвижения и по меньшей мере одной дополнительной виртуальной длиной (9) выдвижения, при этом при помощи буфера длина (1) выдвижения и/или непрерывная во времени виртуальная длина (7, 9) выдвижения может подстраиваться при помощи опорных значений или дискретных по времени виртуальных длин (7, 9) выдвижения, и/или
- предусмотрено по меньшей мере одно устройство (11) визуализации, с помощью которого можно визуализировать по меньшей мере одну первую виртуальную длину (7) выдвижения, по меньшей мере одну дополнительную виртуальную длину (9) выдвижения и/или длину (1) выдвижения.
| DE 102011080381 A1, 07.02.2013 | |||
| US 6357132 B1, 19.03.2002 | |||
| DE 102019211880 A1, 11.02.2021 | |||
| 0 |
|
SU154954A1 | |

