Область техники, к которой относится изобретение
Изобретение относится к тягачу, в частности трактору, с признаками, раскрытыми в ограничительной части пункта 1 формулы изобретения. Кроме того, изобретение относится к системе помощи водителю для использования в тягаче согласно пункту 16 формулы, и к способу эксплуатации тягача согласно пункту 19 формулы.
Уровень техники
В уровне техники известен тягач, в частности трактор или подобная ему машина, оснащенный различными системами регулировки давления в шинах, позволяющими оператору тягача задавать требуемое давление в шинах. Известно, что тягач можно адаптировать к решению определенных задач, выбрав подходящее давление в шинах. Например, при выполнении полевых работ давление в шинах тягача устанавливают ниже, чем при движении по дороге, что позволяет снизить нагрузку на грунт и тем самым его уплотнение, а также повысить эффективность тягового усилия при движении по полю за счет увеличения площади контактной поверхности (сравнительно низкое давление в шинах). С другой стороны, при движении по дороге (относительно высокое давление в шинах) в значительной степени экономится топливо благодаря пониженному сопротивлению качению пары шина-грунт.
Несмотря на наличие известных систем регулировки давления в шинах и, следовательно, технической возможности установки нужного давления в шинах, оператору сложно точно подобрать давление в шинах для решения соответствующей задачи. При выборе давления в шинах, подходящего для решения определенной задачи, необходимо учесть множество различных факторов, которые при этом могут изменяться во время работы тягача. Кроме того, при выборе давления в шинах необходимо исключить превышение так называемой предельной несущей способности шины, указанной производителем шин. При этом под предельной несущей способностью шины понимают давление в шине, минимально допустимое для определенной нагрузки на колесо и скорости движения тягача.
В патентной заявке ЕР 3 216 628 В1 раскрыто устройство отслеживания давления в шинах тягача с адаптированным сельскохозяйственным навесным орудием, образующего систему транспортного средства, с признаками, раскрытыми в ограничительной части пункта 1 формулы. Устройство отслеживания давления в шинах предназначено для установки и адаптации давления по меньшей мере в одной шине системы транспортного средства с помощью устройства регулировки давления в шинах на основании классификации рабочего состояния, выполненной на основании таких параметров рабочего состояния, как состояние поверхности грунта под тягачом, для различения движения по дороге и по полю. Полученную классификацию рабочего состояния сохраняют с географической привязкой, чтобы при распознавании повторного приближения системы транспортного средства к сохраненной геолокации вызвать соответствующую классификацию рабочего состояния и соответствующим образом заблаговременно и автоматически адаптировать давление в шинах путем управления системой регулировки давления в шинах. При этом выставляемое давление в шинах в первую очередь зависит от того, движется ли транспортное средство по дороге или в поле. Соответственно, давление в шинах либо повышают для экономии топлива при движении тягача по дороге, либо максимально снижают для причинения минимального ущерба грунту при движении по полю.
Раскрытие сущности изобретения
Задачей настоящего изобретения является разработка и усовершенствование тягача вышеуказанного типа таким образом, чтобы улучшить выявление и учет сложных взаимосвязей при регулировке и адаптации давления в шинах тягача и адаптированного навесного орудия.
Поставленная задача в части оборудования решена тягачом с признаками, раскрытыми в пункте 1 формулы. Кроме того, для решения поставленной задачи предложена система помощи водителю с автоматическим устройством регулировки давления в шинах для использования с тягачом, признаки которой раскрыты в дополнительном независимом пункте 16 формулы, и способ эксплуатации тягача с признаками, раскрытыми в дополнительном независимом пункте 19 формулы.
Согласно пункту 1 формулы предложен тягач, в частности трактор, с силовым агрегатом и системой регулировки давления в шинах для установки и адаптации давления по меньшей мере в одной шине тягача, а также по меньшей мере с одним навесным орудием, адаптированным к тягачу, причем силовой агрегат содержит по меньшей мере один приводной двигатель, коробку передач, по меньшей мере один механизм отбора мощности и по меньшей мере один вспомогательный механизм. Предложенный изобретением тягач отличается тем, что для управления системой регулировки давления в шинах тягач оснащен системой помощи водителю, содержащей вычислительный блок, запоминающий блок и блок ввода/вывода, причем система помощи водителю содержит автоматическое устройство регулировки давления в шинах, работающее на основании характеристических кривых, причем автоматическое устройство регулировки давления в шинах выполнено с возможностью оптимизированного управления системой регулировки давления в шинах в зависимости от выбираемых стратегий управления и/или целевых параметров оптимизации, хранящихся в запоминающем блоке. Система помощи водителю позволяет оператору тягача оптимизировать управление системой регулировки давления в шинах путем выбора стратегии управления и/или одной или нескольких целевых параметров оптимизации, не обладая глубокими знаниями эксплуатационных свойств шин при различном давлении в шинах и различных условиях эксплуатации тягача. При этом автоматическое устройство регулировки давления в шинах, работающее на основании характеристических кривых, в целом учитывает взаимосвязи, влияющие на стратегию управления и целевой параметр или параметры оптимизации. Автоматическое устройство регулировки давления в шинах выполнено с возможностью автоматического определения давления в шинах, что дает максимальную эффективность тяги (тяговое усилие) в текущих условиях тяги. Для этого также регистрируют параметры, влияющие на силовой агрегат (параметры влияния), учитываемые при определении оптимального давления в шинах в каждом конкретном случае. Под данными параметрами влияния понимают, в частности, эффективность компонентов силового агрегата. Выгодным образом, автоматическое устройство регулировки давления в шинах может учитывать разброс значений эффективности и/или меняющиеся эксплуатационные свойства тягача и навесного орудия, а также изменение окружающих условий, имеющие место на практике. Автоматическое устройство регулировки давления в шинах, работающее на основании характеристических кривых, учитывает все параметры влияния системы, состоящей из тягача и навесного орудия. В частности, автоматическое устройство регулировки давления в шинах учитывает разброс значений эффективности и/или меняющиеся эксплуатационные свойства ходовой части тягача, имеющие место на практике. Путем автоматической регулировки давления в шинах тягач, предложенный изобретением, позволяет оптимизировать в целом всю систему, состоящую из тягача с силовым агрегатом и адаптированного навесного орудия, для обеспечения оптимальной работы в данной рабочей ситуации. Вычислительный блок, запоминающий блок и блок ввода/вывода системы помощи водителю могут быть физически разделены, то есть их не обязательно совместно устанавливать на тягаче.
Под стратегией управления понимают приоритетное задание режима работы тягача без выбора одного или нескольких параметров управления. Под целевым параметром оптимизации понимают определенное целевое значение с указанием одного или нескольких параметров управления, которое должно быть достигнуто путем управления силовым агрегатом посредством автоматического устройства регулировки давления в шинах. Соответствующий целевой параметр оптимизации представляет собой отдельный подраздел стратегии управления, требующий адаптации для достижения и поддержания стратегии управления.
Приводной двигатель силового агрегата выполнен в виде двигателя внутреннего сгорания. Кроме того, силовой агрегат может содержать дополнительный приводной двигатель, выполненный, например, в виде электродвигателя. Коробка передач, предпочтительно, выполнена в виде коробки передач с переключением под нагрузкой или бесступенчатой коробки передач. Вспомогательный механизм силового агрегата представляет собой, например, вентилятор двигателя, гидравлический насос или электрический генератор. Кроме того, вспомогательным механизмом, приводимым от силового агрегата, могут являться устройства для установки навесного оборудования, в частности, передняя и/или задняя навесная система. Под механизмом отбора мощности понимают, в частности вал отбора мощности, который может служить для привода навесного оборудования.
Навесным оборудованием тягача может быть, например, транспортный прицеп, тележку-погрузчик, валкователь, сеноворошилка, косилка, пресс-подборщик, почвообрабатывающее орудие, например, культиватор или плуг, опрыскиватель или разбрасыватель удобрений.
Таким образом, система регулировки давления в шинах вместе с системой помощи водителю могут образовывать автоматическое устройство регулировки давления в шинах, причем вычислительный блок выполнен с возможностью автономного определения параметров, влияющих на устанавливаемое давление в шинах, и их передачу в систему контроля давления в шинах для реализации выбранной стратегии управления и/или целевого параметра оптимизации. Основой для определения параметров, влияющих на давление в шинах, устанавливаемое системой регулировки давления в шинах, служит выбранная стратегия управления или целевой параметр оптимизации, хранящиеся в запоминающем блоке системы помощи водителю. В предложенном варианте осуществления автоматического устройства регулировки давления в шинах оператор может задать вид управления системой регулировки давления в шинах путем однократного выбора стратегии управления или целевых параметров оптимизации. Строго говоря, для дальнейшего определения параметров системы регулировки давления в шинах, влияющих на устанавливаемое давление в шинах, не требуется ввод дополнительных данных водителем, так как он выполняется автоматически автоматическим устройством регулировки давления в шинах. Тем не менее, оператору может быть предоставлена возможность, например, изменения выбранной стратегии управления и/или целевого параметра оптимизации, после чего автоматическое устройство регулировки давления в шинах продолжит самостоятельно управлять системой регулировки давления в шинах, но, возможно, с другими приоритетами.
В частности, выбираемая стратегия регулирования может содержать по меньшей мере одну стратегию регулирования «Эффективность» или «Производительность». Стратегия управления «Эффективность» оптимизирует расход топлива на единицу площади, причем рабочая точка на n-мерном графике характеристик с учетом параметров силового агрегата лежит в диапазоне минимально возможного расхода топлива. Стратегия управления «Производительность» оптимизирует производительность на единицу площади, причем рабочая точка на n-мерном графике характеристик с учетом параметров, влияющих на устанавливаемое давление в шинах, лежит в зоне максимальной производительности на единицу площади. Для этого давление в шинах изменяют в соответствии с выбранной стратегией управления или целевым параметром оптимизации с учетом других параметров, влияющих на эффективность системы, в частности, параметров силового агрегата.
Целевыми параметрами оптимизации могут быть «Производительность на единицу площади», «Расход на единицу площади», «Урожайность на единицу площади», «Затраты на единицу площади» и/или «Качество работы». Целевой параметр оптимизации «Затраты на единицу площади» может приоритетно учитывать, например, возникающие затраты на персонал, топливо и износ, отработанные часы и другие параметры. Целевой параметр оптимизации «Производительность на единицу площади» может быть приоритетно направлен, например, на увеличение обработанной площади и/или обработанной массы сельскохозяйственной продукции. Целевой параметр оптимизации «Качество работы» при управлении силовым агрегатом в первую очередь ориентирован, например, на примешивание пожнивных остатков, грануляцию, обратное прикатывание, качество кормовой массы и другие параметры.
Предпочтительно, автоматическое устройство регулировки давления в шинах может быть выполнено с возможностью оптимизации эффективности тяги (тягового усилия) тягача в зависимости от выбранной стратегии управления и/или целевого параметра оптимизации. В частности, при движении по полю автоматическое определение и регулировка давления в шинах с помощью автоматического устройства регулировки давления в шинах позволяют установить максимальную или оптимальную эффективность тяги для существующих условий тяги с учетом предельной несущей способности шины, управляя системой регулировки давления в шинах. Под движением по полю понимают, в том числе, движение тягача во время работы, выполняемой, например, на силосной площадке или другом грунте, не имеющем укрепленной поверхности.
Предпочтительно, автоматическое устройство регулировки давления в шинах может быть выполнено с возможностью оптимизации давления в шинах конкретного колеса и/или конкретной оси и/или всех колес. Это позволяет максимально увеличить гибкость реализации выбранной стратегии управления и/или целевого параметра оптимизации автоматическим устройством регулировки давления в шинах.
При этом параметрами, которые необходимо учитывать для оптимизированного управления системой регулировки давления в шинах, могут являться эксплуатационные параметры тягача, силового агрегата, навесного орудия и/или параметры окружающей среды, определяемые из окружающих условий. Предпочтительно, в оптимизированном управлении используют по меньшей мере эксплуатационные параметры силового агрегата и навесного орудия, так как они, как правило, могут быть определены непосредственно на тягаче или навесном орудии. Кроме того, автоматическое устройство регулировки давления в шинах может измерять, определять или получать параметры окружающей среды, что позволяет делать выводы о преобладающих в настоящее время характеристиках грунта, по которой движется тягач и адаптированное навесное орудие.
Предпочтительно, по меньшей мере на тягаче могут быть расположены датчики, служащие для определения эксплуатационных параметров и/или параметров окружающей среды. Например, одним из датчиков может быть датчик частоты вращения, датчик крутящего момента, датчик давления или датчик усилия. Датчики для определения эксплуатационных параметров тягача непосредственно соединены с силовым агрегатом или его компонентами, в частности, механизмом отбора мощности или вспомогательными механизмами. Кроме того, к тягачу и/или навесному орудию могут быть подсоединены дополнительные датчики, выполненные с возможностью определения эксплуатационных характеристик или эксплуатационных параметров тягача и/или навесного орудия, а также определения и/или приема параметров окружающей среды. Например, одним из датчиков может быть датчик скорости, датчик наклона, оптический датчик и/или датчик положения. Датчик наклона позволяет, например, определить наклон тягача и/или навесного орудия в продольном и/или поперечном направлении. Это позволяет сделать выводы о топологии, преобладающей в соответствующей рабочей ситуации. Данная эксплуатационная информация может быть дополнена и/или проверена показаниями датчика положения.
В частности, эксплуатационные параметры тягача и/или навесного орудия могут включать в себя выходную мощность по меньшей мере одного приводного двигателя, выходную мощность или степень загрузки коробки передач, приводную мощность по меньшей мере одного вспомогательного механизма и/или по меньшей мере одного механизма отбора мощности, проскальзывание, скорость движения, передаточное отношение, поток мощности в гидравлическом силовом агрегате, тип навесного орудия и/или установочный параметр навесного орудия.
Кроме того, в запоминающем блоке может быть сохранена функциональная модель тягача и навесного орудия, по меньшей мере частично отражающая функциональную взаимосвязь тягача и навесного орудия. Таким образом, с помощью функциональной модели можно моделировать различные рабочие ситуации тягача и адаптированного навесного орудия, чтобы оптимизировать управление системой регулировки давления в шинах в соответствующей рабочей ситуации и с учетом выбранной стратегии управления и/или целевым параметром или параметрами оптимизации посредством автоматического устройства регулировки давления в шинах. В альтернативном варианте возможны чистые модели «черного ящика», основанные, например, на искусственном интеллекте или нейронных сетях, или смешанные формы, для отражения по меньшей мере некоторых функциональных взаимосвязей силового агрегата.
Предпочтительно, для отображения функциональных взаимосвязей тягача эксплуатационному параметру «Давление в шинах» может быть назначен по меньшей мере один n-мерный график характеристик, причем давление в шинах задано как выходной параметр по меньшей мере одного n-мерного графика характеристик. С помощью по меньшей мере одного n-мерного графика характеристик можно с минимальными затратами вычислительных мощностей представлять даже сложные функциональные взаимосвязи общей системы, состоящей из тягача, навесного орудия и окружения. Кривые n-мерного графика характеристик можно адаптировать к соответствующей ситуации для учета в полном объеме взаимосвязей тягача, навесного орудия и окружающих условий во время работы, влияющих на стратегии управления или целевой параметр или параметры оптимизации и, соответственно, необходимую величину давления в шинах. При этом адаптация кривых n-мерного графика характеристик осуществляется автоматическим устройством регулировки давления в шинах.
При этом, по меньшей мере один или несколько эксплуатационных параметров тягача, навесного орудия и/или параметров окружающей среды, определяемых из окружающих условий, могут представлять собой входные параметры по меньшей мере одного n-мерного графика характеристик. Таким образом, в качестве входных параметров могут использоваться следующие эксплуатационные параметры: выходная мощность по меньшей мере одного приводного двигателя, выходная мощность коробки передач, степень загрузки коробки передач, приводная мощность по меньшей мере одного вспомогательного механизма и/или по меньшей мере одного механизма отбора мощности, проскальзывание, поток мощности в механизме отбора мощности и/или поток мощности в гидравлическом приводе и/или электрическом силовом агрегате. Другими входными параметрами могут быть размер и тип шин, установленных на осях тягача, а также усилия, передаваемые шинами на грунт. Параметры окружающей среды, используемые в качестве входных параметров, могут представлять собой, в частности, тип грунта, состояние грунта и/или влажность грунта, а также соответствующий рельеф местности. Эти параметры окружающей среды могут использоваться в качестве входных параметров как во время движения по полю, так и во время движения по дороге.
Предпочтительно, вычислительный блок может выбрать по меньшей мере один n-мерный график характеристик в зависимости от выбранной стратегии управления и/или целевого параметра или параметров оптимизации и на этом основании определить давление в шинах. Это позволяет создать исходную базу для управления системой регулировки давления в шинах для достижения желаемых результатов, которые должны быть получены при выборе стратегии управления и/или целевого параметра или параметров оптимизации, без дополнительного вмешательства оператора.
В следующем предпочтительном варианте осуществления вычислительный блок может сопоставлять по меньшей мере один n-мерный график характеристик во время текущей работы, в частности, циклически, с условиями эксплуатации тягача и навесного орудия, причем, предпочтительно, в запоминающем блоке сохранен по меньшей мере один n-мерный исходный график характеристик, и при первом определении давления в шинах вычислительный блок осуществляет определение на основании исходного графика характеристик.
При этом вычислительный блок может быть выполнен с возможностью адаптации исходного графика характеристик к существующим условиям эксплуатации путем использования измеренных эксплуатационных параметров по меньшей мере тягача, в частности, в том числе навесного орудия, или путем перехода к опорным точкам на исходном графике характеристик. Кроме того, измеренные, полученные или определенные иным образом параметры окружающей среды могут быть использованы для адаптации исходного графика характеристик к существующим условиям эксплуатации. Если измеренные параметры отсутствуют в n-мерном пространстве исходного графика характеристик или доступны лишь в недостаточном количестве, причем они не могут быть достигнуты в стандартном режиме эксплуатации тягача, то вместо них могут быть достигнуты опорные точки. На основании исходного графика характеристик можно адаптировать график характеристик к текущим условиям эксплуатации, настроив заданные рабочие точки, отражающие опорные точки на графике характеристик.
Во время эксплуатации тягача точное отображение по меньшей мере одного n-мерного графика характеристик может быть адаптировано к текущим условиям эксплуатации путем определения по меньшей мере одного из параметров, нанесенных на n-мерный график характеристик. Во время работы тягача, то есть во время движения по полю или по дороге, возможны значительные колебания условий эксплуатации, которые могут быть своевременно обнаружены и учтены автоматическим устройством регулировки давления в шинах для оптимизированного управления в соответствии с выбранной стратегией управления и/или целевым параметром или параметрами оптимизации. «Своевременно» означает, что автоматическое устройство регулировки давления в шинах может реагировать на изменения в течение промежутка времени, определяемого в зависимости от эксплуатационных параметров и сроков реагирования системы регулировки давления в шинах, для изменения давления в шинах.
Знание n-мерного графика характеристик позволяет автоматическому устройству регулировки давления в шинах автоматически регулировать давление в шине конкретного колес и/или конкретной оси и/или всех колес таким образом, чтобы давление в шинах было оптимизировано в соответствии с выбранной стратегией управления и/или целевым параметром или параметрами оптимизации. В этом случае давление в шинах служит регулирующим параметром.
Кроме того, задача, поставленная в пункте 16, решена системой помощи водителю с автоматическим устройством регулировки давления в шинах для использования в тягаче по одному из пунктов 1-15 формулы.
При этом система помощи водителю может быть реализована на базе облачного сервиса данных. В этом случае данные, получаемые датчиками тягача и/или навесного орудия, а также внешняя информация поступает в облачный сервис, где обрабатывается алгоритмом. Обработанные данные передаются на автоматическое устройство регулировки давления в шинах в качестве передаваемых данных, в зависимости от которых выбирается стратегия управления. В качестве альтернативы или дополнения внешний вычислительный блок может обрабатывать данные, в частности, внешнюю информацию от поставщиков услуг, с помощью алгоритма и передавать обработанные данные в качестве передаваемых данных, в зависимости от которых выбирается стратегия управления, в автоматическое устройство регулировки давления в шинах.
Кроме того, система помощи водителю может содержать мобильное устройство передачи данных. Мобильное устройство передачи данных может быть соединено с облачным сервисом данных с возможностью передачи данных.
Кроме того, поставленная задача решена способом управления тягачом с признаками, раскрытыми в дополнительном независимом пункте 19 формулы.
В дополнительном независимом пункте 19 формулы предложен способ эксплуатации тягача, в частности трактора, с силовым агрегатом и системой регулировки давления в шинах для установки и адаптации давления по меньшей мере в одной шине тягача и по меньшей мере с одним адаптированным к тягачу навесным орудием, в котором силовой агрегат содержит по меньшей мере один приводной двигатель, коробку передач, по меньшей мере один механизм отбора мощности и по меньшей мере один вспомогательный механизм, причем тягачом управляют посредством системы помощи водителю, содержащей вычислительный блок, запоминающий блок и блок ввода/вывода, причем системой регулировки давления в шинах управляют посредством автоматического устройства регулировки давления в шинах системы помощи водителю, работающего на основании характеристических кривых, причем автоматическое устройство регулировки давления в шинах используют для оптимизированного управления системой регулировки давления в шинах в зависимости от выбираемых стратегий управления и/или целевых параметров оптимизации, хранящихся в запоминающем блоке. Способ позволяет оптимизировать систему в целом, состоящую из тягача и адаптированного навесного орудия, на основании регулировки давления в шинах.
Систему регулировки давления в шинах оптимизируют посредством автоматического устройства регулировки давления в шинах, обеспечивая максимальную эффективность тяги в существующих в настоящее время условиях тяги. Для этого регистрируют и учитывают параметры тягача и навесного орудия, влияющие на соответствующее оптимальное давление в шинах. Выгодным образом, автоматическое устройство регулировки давления в шинах способно учитывать имеющий место на практике разброс значений эффективности и/или рабочих характеристик тягача и навесного орудия, а также изменения окружающих условий. В частности, автоматическое устройство регулировки давления в шинах учитывает имеющий место на практике разброс значений эффективности и/или рабочих характеристик ходовой части тягача.
К способу управления тягачом могут относиться все признаки, описанные в связи с сельскохозяйственным тягачом и системой помощи водителю, как по отдельности, так и в сочетании друг с другом.
Краткое описание чертежей
Предложенное изобретение раскрыто ниже в подробностях со ссылкой на вариант осуществления, представленный на фигурах, на которых изображено:
Фигура 1: схематичное изображение тягача и адаптированного к тягачу навесного орудия.
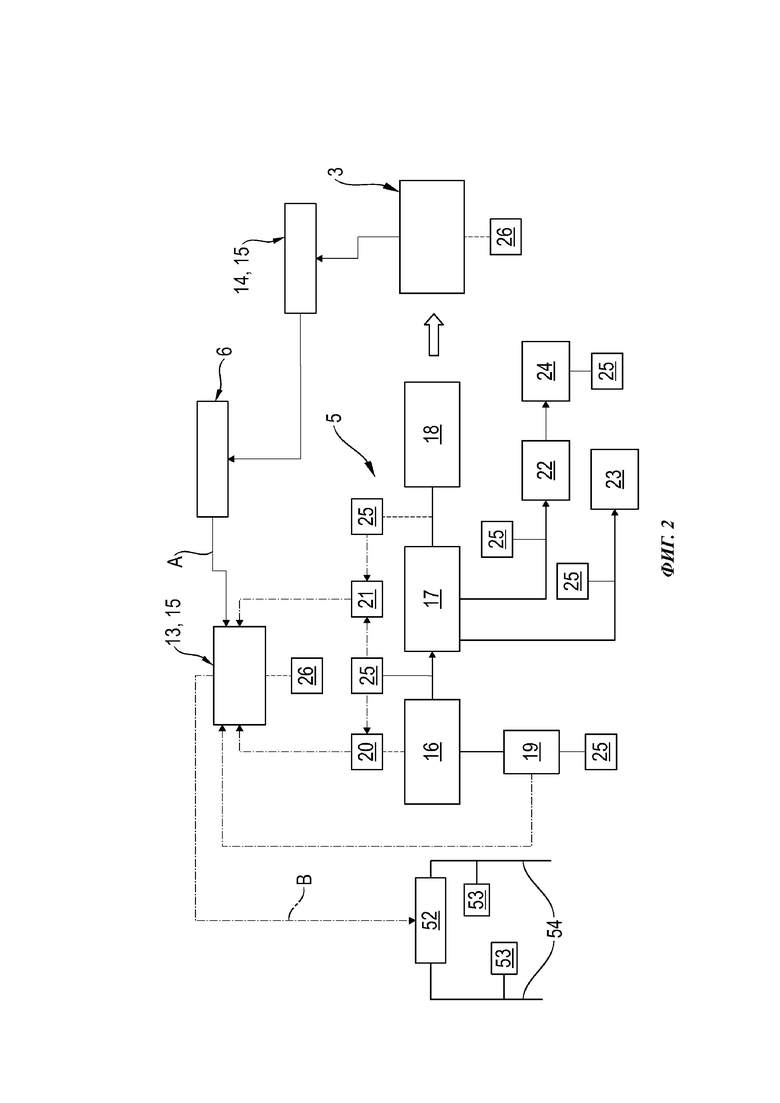
Фигура 2: схематичное изображение силового агрегата тягача.
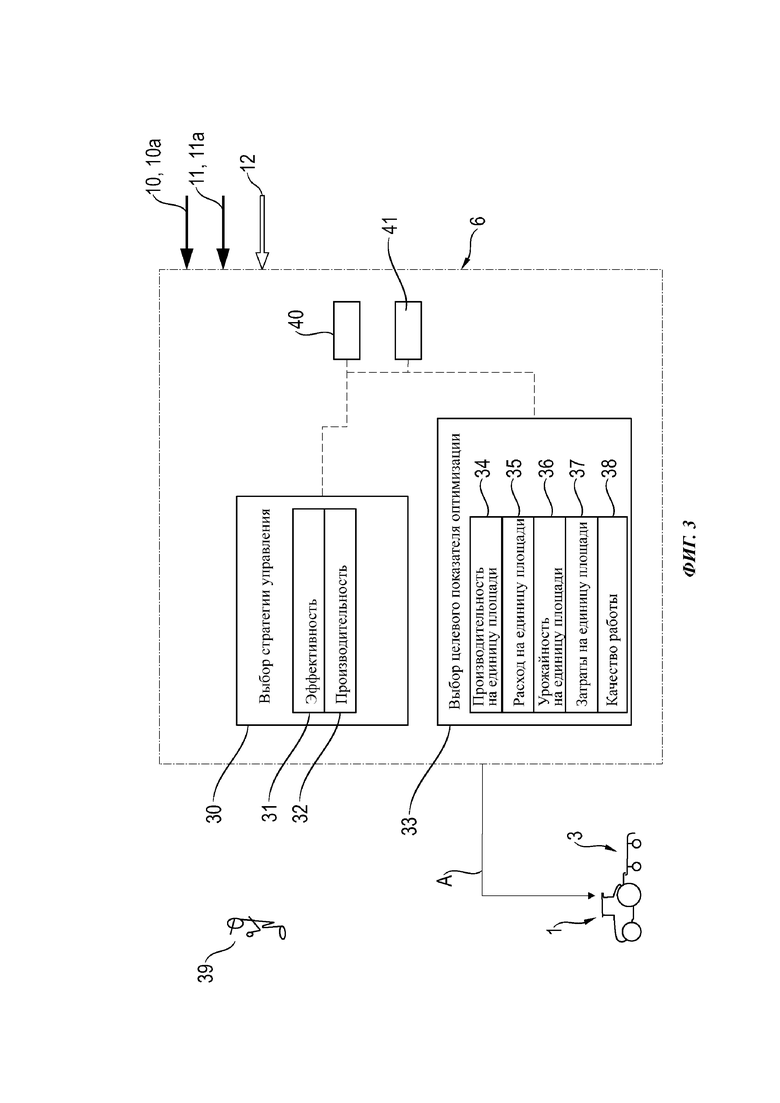
Фигура 3: детальный вид системы помощи водителю тягача.
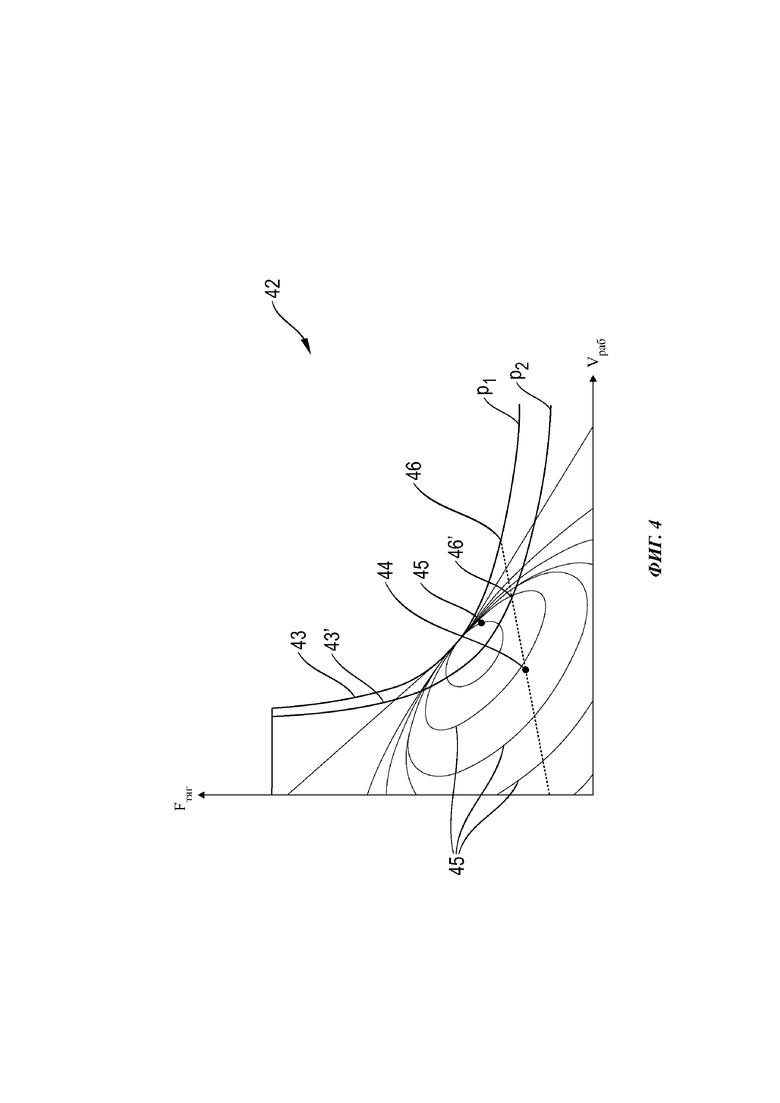
Фигура 4: пример n-мерного графика характеристик для управления системой регулировки давления в шинах тягача.
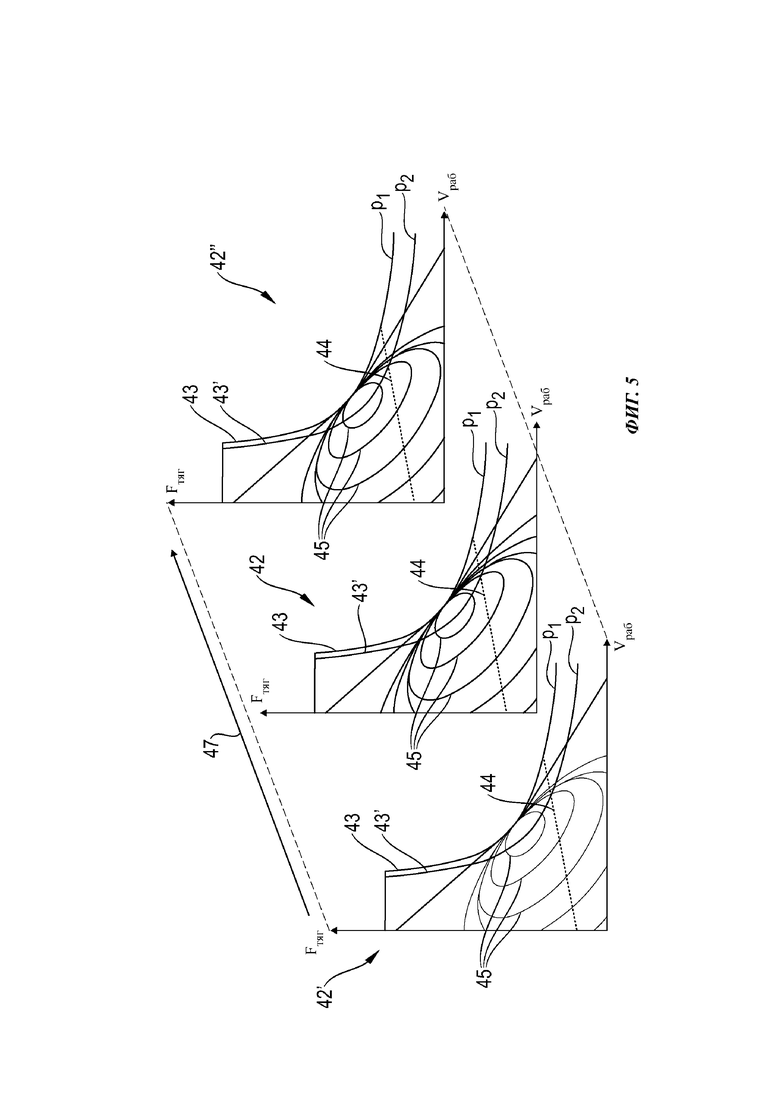
Фигура 5: пример исходного графика характеристик, адаптированного в связи с изменением одного из эксплуатационных параметров тягача.
Осуществление изобретения
Сельскохозяйственная сцепка, изображенная на фигуре 1, содержит тягач 1, выполненный в виде трактора 2, и по меньшей мере одно адаптированное к тягачу 1 навесное орудие 3. В данном варианте осуществления навесное орудие 3 выполнено в виде почвообрабатывающего навесного орудия 4, так называемого культиватора. В рамках изобретения навесное орудие 3 может представлять собой любое навесное оборудование, например, транспортный прицеп, тележку-погрузчик, валкователь, сеноворошилку, косилку, пресс-подборщик, другие почвообрабатывающие навесные орудия, в частности, плуг, опрыскиватель или разбрасыватель удобрений. Тягач 1 содержит силовой агрегат 5, схематично изображенный на фигуре 2. Кроме того, тягач 1 содержит по меньшей мере две оси, а именно переднюю ось 48 и заднюю ось 49, на которых расположены шины 50, 51, установленные на передних и задних колесах и служащие средством сцепления с грунтом. Кроме того, предусмотрена система 52 регулировки давления в шинах, оснащенная не показанными на фигуре пневматическими компонентами и служащая для установки и адаптации давления р1, р2 по меньшей мере в одной из шин 50, 51 тягача 1. Пневматические компоненты системы 52 регулировки давления в шинах соединены с шинами 50, 51 отдельными линиями 54 (включая вращающиеся соединения, не показанные на фигуре). Система 52 регулировки давления в шинах позволяет накачивать или сдувать шины 50, 51 тягача 1 даже во время движения.
Система 6 помощи водителю связана с тягачом 1 для управления силовым агрегатом 5 и системой 52 регулировки давления в шинах, что будет раскрыто в деталях ниже. Система 6 помощи водителю, предложенная изобретением, содержит по меньшей мере вычислительный блок 7, запоминающий блок 8 и блок 9 ввода/вывода. Вычислительный блок 7 обрабатывает информацию 10, предоставленную установленными на машине датчиками 25, 26, а также датчиками 53 давления тягача 1 и/или навесного орудия 3, внешнюю информацию 11 и информацию 12, которая может быть сохранена в вычислительном блоке 7. Датчики 53 давления циклически определяют давление р1, р2 в шинах 50, 51 и передают его в систему 6 помощи водителю. Информация 10, сгенерированная внутренними датчиками 25, 26, содержит параметры 10а окружающей среды, в частности, вид грунта, тип грунта, состояние грунта, влажность грунта, рельеф и погодные условия. Некоторые из параметров 10а окружающей среды также доступны в виде внешней информации или внешних параметров 11а окружающей среды, что может относиться, в частности, к данным о погоде или рельефе.
Кроме того, с тягачом 1 и навесным орудием 3 соединено одно или несколько управляющих устройств 13, 14 для управления и регулирования тягача 1 и/или соответствующего навесного орудия 3. В рамках изобретения к тягачу 1 и навесному орудию 3 подключают либо отдельные управляющие устройства 13, 14, либо общее управляющее устройство 15. Общее управляющее устройство 15 может быть установлено на тягаче 1 или навесном орудии 3 или выполнено мобильным, чтобы оператор тягача 1 мог носить общее управляющее устройство 15 с собой. В рамках изобретения мобильным может быть выполнен только блок 9 ввода/вывода, чтобы оператор тягача 1 мог носить его с собой. Также возможно дистанционное управление системой 6 помощи водителю с помощью средств удаленного доступа. Кроме того, система 6 помощи водителю может быть реализована на базе облачного сервиса данных, в котором данные сохраняются с возможностью вызова и редактирования по меньшей мере частично на внешнем, пространственно удаленном запоминающем устройстве внешнего сервера или внешнего вычислительного блока 29 вместо запоминающего блока 8. Внешний вычислительный блок 29 может быть частью облачного сервиса данных, управляемого сторонним поставщиком.
Система 6 помощи водителю содержит автоматическое устройство 27 регулировки давления в шинах, работающее на основании характеристических кривых, что позволяет оптимизировать настройку давления р1, р2 в шинах 50, 51 тягача 1. В простейшем случае это реализовано следующим образом: автоматическое устройство 27 регулировки давления в шинах генерирует управляющие сигналы А, направляемые по меньшей мере на управляющее устройство 13 или управляющий блок 15 тягача 1, в котором они осуществляют управление системой 52 регулировки давления в шинах тягача 1 путем генерирования соответствующих управляющих сигналов В.
На фигуре 2 схематично изображен силовой агрегат 5 тягача 1. Силовой агрегат 5 содержит по меньшей мере один приводной двигатель 16, коробку 17 передач, по меньшей мере один механизм 18 отбора мощности и по меньшей мере один вспомогательный механизм 19. Приводной двигатель 16 выполнен в виде двигателя внутреннего сгорания. Приводной двигатель 16 управляется блоком 20 управления двигателя. Коробка 17 передач выполнена в виде коробки передач с переключением под нагрузкой или бесступенчатой коробки передач. Коробка 17 передач управляется блоком 21 управления коробки передач. По меньшей мере один механизм 18 отбора мощности выполнен в виде вала отбора мощности, служащего для привода навесного орудия 3. По меньшей мере один вспомогательный механизм 19 может быть выполнен в виде вентилятора двигателя, входящего в состав охлаждающего устройства приводного двигателя 16. Кроме того, силовой агрегат 5 может содержать гидравлический привод 22 и/или электрический привод 23. При этом, например, гидравлический насос и гидравлический двигатель или генератор и электродвигатель могут являться дополнительными вспомогательными механизмами 19 силового агрегата 5. Гидравлический привод 22 служит, например, для управления подъемной навесной системой 24, служащей для адаптации навесного орудия 3 к тягачу 1.
К силовому агрегату 5 подсоединены датчики 25, выполненные с возможностью определения эксплуатационных параметров силового агрегата 5 или его различных компонентов. При этом датчики 25 могут представлять собой, например, датчик частоты вращения, датчик крутящего момента, датчик давления или датчик усилия. Датчики 25 для определения эксплуатационных параметров силового агрегата 5 непосредственно соединены с силовым агрегатом 5. Кроме того, с тягачом 1 и/или навесным орудием 3 могут быть соединены дополнительные датчики 26, выполненные с возможностью определения конкретных эксплуатационных параметров тягача 1 и/или навесного орудия 3, которые могут определяться, в том числе, независимо от силового агрегата 5. При этом одним из дополнительных датчиков 26 может быть, например, датчик скорости, датчик наклона, оптический датчик и/или датчик положения. Кроме того, по меньшей мере один из дополнительных датчиков 26 может быть выполнен с возможностью приема и/или определения спутниковой информации, в частности, геоданных или данных о растительном покрове, которые могут представлять собой внешнюю информацию 11, а также информацию 12, хранящуюся в вычислительном блоке 7, в частности, топографические данные, данные планирования маршрутов и многое другое. Кроме того, по меньшей мере один из дополнительных датчиков 26 может быть выполнен с возможностью определения данных, позволяющих сделать вывод о свойствах почвы или грунта, по которому движется тягач 1.
Датчики 25 силового агрегата 5, а также дополнительные датчики 26 и датчики 53 давления тягача 1 и/или навесного орудия 3 передают полученную информацию 10 опосредованно или напрямую в систему 6 помощи водителю. Вычислительный блок 7 выполнен с возможностью оценки информации 10. Связь между блоком 20 управления двигателя, блоком 21 управления коробки передач, датчиками 25, 26, отдельными управляющими устройствами 13, 14 или управляющим блоком 15 и системой 6 помощи водителю может осуществляться по различным каналам, например, по системе шин тягача 1 или навесного орудия 3 или беспроводной системе связи.
Система 52 регулировки давления в шинах вместе с системой 6 помощи водителю образует автоматическое устройство 27 регулировки давления в шинах. При этом система помощи водителю 6 может содержать свод 28 правил, связанный с автоматическим устройством 27 регулировки давления в шинах и оптимизирующий работу тягача 1 путем оптимизированного управления системой 52 регулировки давления в шинах. При этом автоматическое устройство 27 регулировки давления в шинах, работающее на основании характеристических кривых, выполнено с возможностью оптимизированного управления системой 52 регулировки давления в шинах в зависимости от выбираемых стратегий 30 управления и/или целевых параметров 33 оптимизации, сохраненных в запоминающем блоке 8. Таким образом, система в целом или сцепка из тягача 1 и навесного орудия 3 целиком оптимизируется на основании регулировки давления р1, р2 в шинах, а не как раньше, только на основании неполных знаний оператора 39 об эксплуатационных свойствах шин 50, 51 при различном давлении р1, р2 в шинах. Автоматическое устройство 27 регулировки давления в шинах выполнено с возможностью автоматического определения давления р1, р2 в шинах, что позволяет добиться максимальной эффективности тяги в текущих условиях тяги с учетом выбранной стратегии 30 управления и/или целевого параметра или параметров 33 оптимизации.
Кроме того, в рамках изобретения в управляющем устройстве 13, связанном с тягачом 1 и выполненном, предпочтительно, в виде рабочего компьютера, записан свод 28 правил для оптимизации управления системой 52 регулировки давления в шинах. Кроме того, в рамках изобретения необходимый свод 28 правил может храниться централизованно на внешнем вычислительном блоке 29, не описанном в деталях, или в другой резервной системе, например, на базе облака данных, и может быть вызван посредством канала связи, в частности двустороннего канала связи, между тягачом 1 и вычислительным блоком 29.
На фигуре 3 в детализации изображена система 6 помощи водителю тягача 1 или трактора 2, причем визуальный, эксплуатационный и конструктивный аспект сведены в одно изображение. Для оптимизации работы системы 52 регулировки давления в шинах тягача 1 система 6 помощи водителю содержит выбираемые стратегии 30 управления, причем выбираемые стратегии 30 управления могут представлять собой специфические для тягача стратегии и/или специфические для навесного орудия стратегии. Эффективная оптимизация управления системой 52 регулировки давления в шинах тягача 1 с учетом адаптированного навесного орудия 3 производится в том случае, если в число выбираемых стратегий 30 управления входит по меньшей мере одна из стратегий управления «Эффективность» 31 и «Производительность» 32. Стратегия управления «Эффективность» 31 путем изменения давления р1, р2 в шинах 50, 51 определенных колес и/или осей позволяет оптимизировать расход топлива на единицу площади, то есть работу тягача 1 и адаптированного к нему навесного орудия 3 в диапазоне минимально возможного расхода топлива. Стратегия управления «Производительность» 32 оптимизирует производительность на единицу площади путем изменения давления р1, р2 в шинах 50, 51 определенных колес и/или осей.
Кроме того, система 6 помощи водителю для оптимизации работы тягача 1 содержит целевые параметры 33 оптимизации, выбираемые посредством оптимального управления системой 52 регулировки давления в шинах. В качестве альтернативы или дополнения к стратегиям 30 управления оператор 39 может выбирать целевые параметры 33 оптимизации.
Кроме того, система 6 помощи водителю может работать в режиме 40 диалога с оператором 39 или в автоматическом режиме 41. В обоих случаях общение, то есть диалог с оператором 39, происходит на естественном языке.
Целевыми параметрами 33 оптимизации могут быть «Производительность на единицу площади» 34, «Расход на единицу площади» 35, «Урожайность на единицу площади» 36, «Затраты на единицу площади» 37 и/или «Качество работы» 38. Целевой параметр 33 оптимизации «Производительность на единицу площади» 34 может быть направлен, например, преимущественно на увеличение обрабатываемой площади и/или обрабатываемой массы сельскохозяйственной продукции за единицу времени (га/ч). Целевой параметр 33 оптимизации «Расход на единицу площади» 35 направлен на минимизацию расхода топлива на единицу площади (л/га). Целевой параметр 33 оптимизации «Урожайность на единицу площади» 36 направлен на максимальное увеличение урожайности. Целевой параметр 33 оптимизации «Затраты на единицу площади» 37 может преимущественно учитывать, например, затраты на персонал, топливо и износ, отработанные часы и многое другое. Целевой параметр 33 оптимизации «Качество работы» 38 направлен, например, преимущественно на примешивание пожнивных остатков, грануляцию, обратное прикатывание, качество кормовой массы и другие параметры при управлении системой 52 регулировки давления в шинах.
Система 52 регулировки давления в шинах вместе с системой 6 помощи водителю образует автоматическое устройство 27 регулировки давления в шинах, в котором вычислительный блок 7 системы 6 помощи водителю выполнен с возможностью автоматического определения эксплуатационных параметров силового агрегата 5, тягача 1, навесного орудия 3 и параметров 10а окружающей среды на основании текущих окружающих условий и передачи этих параметров в систему 52 регулировки давления в шинах для реализации соответствующей выбранной стратегии 30 управления и/или целевого параметра 33 оптимизации. Это можно сделать, передавая управляющие сигналы А на управляющее устройство 13 или управляющий блок 15, который затем передает соответствующий управляющий сигнал В в систему 52 регулировки давления в шинах.
Автоматическое устройство 27 регулировки давления в шинах выполнено с возможностью оптимизированного управления системой 52 регулировки давления в шинах в зависимости от выбираемых стратегий 30 управления и/или целевых параметров 33 оптимизации, сохраненных в запоминающем блоке 8. Автоматическое устройство 27 регулировки давления в шинах системы 6 помощи водителю работает на основании характеристических кривых. Для этого в запоминающем блоке 8 хранится по меньшей мере один n-мерный график 42 характеристик, который будет описан ниже со ссылкой на фиг.4. По меньшей мере один n-мерный график 42 характеристик входит в состав свода 28 правил. Для этого автоматическое устройство 27 регулировки давления в шинах изменяет давление р1, р2 в шинах 50, 51 в зависимости от конкретного колеса и/или конкретной оси, оптимизируя тем самым «Расход на единицу площади» 35, то есть расход топлива на единицу площади (л/га), и/или «Производительность на единицу площади» 34, то есть обработанную площадь в час (га/ч) посредством давления р1, р2 в шинах с учетом определенных эксплуатационных параметров и параметров 10а окружающей среды.
На фигуре 4 изображен пример n-мерного графика 42 характеристик для управления системой 52 регулировки давления в шинах. В запоминающем блоке 8 сохранена функциональная модель тягача 1 и навесного орудия 3, отражающая по меньшей мере часть функциональных взаимосвязей тягача 1 и адаптированного навесного орудия 3. Также возможны чистые модели «черного ящика», основанные, например, на искусственном интеллекте или нейронных сетях, а также смешанные формы, отражающие по меньшей мере некоторые функциональные взаимосвязи тягача 1 и навесного орудия 3. Для отображения функциональных зависимостей тягача 1 и навесного орудия 3 эксплуатационному параметру «Давление р1, р2 в шинах» назначают по меньшей мере один n-мерный график 42 характеристик, причем «Давление р1, р2 в шинах» задано как выходной параметр по меньшей мере одного n-мерного графика 42 характеристик.
На графике 42 характеристик в качестве входных параметров отображается рабочая скорость Vpaб в зависимости от тягового усилия Fтяг. Выходным параметром является давление р1, р2 в шинах. Кривые 43, 43' тягового усилия тягача 1 при различном давлении р1, р2 в шинах и кривая 44 тягового усилия навесного орудия 3 отображены в качестве примера на графике 42 характеристик. Кроме того, кривые 45 постоянного удельного расхода топлива отображены на заднем плане в виде так называемых конхоид. Соответствующая точка пересечения кривой 44 тягового усилия навесного орудия 3 с кривой 43 или 43' тягового усилия тягача 1 определяет рабочую точку 46 или 46', возникающую при полной нагрузке при различных настройках давления р1, р2 в шинах. Кривые 45 постоянного удельного расхода топлива могут быть рассчитаны для определенного рабочего состояния с учетом известной конфигурации силового агрегата 5. Определенное рабочее состояние может быть определено эксплуатационными параметрами тягача 1, в частности, силового агрегата 5 по меньшей мере одного вспомогательного механизма 19 силового агрегата 5 и навесного орудия 3 и/или параметрами 10а, 11а окружающей среды, определяемыми из окружающих условий, в том числе, видом грунта, типом грунта, состоянием грунта, влажностью грунта, рельефом местности и погодными условиями. Эксплуатационные параметры силового агрегата 5 по меньшей мере одного вспомогательного механизма 19, навесного орудия 3, гидравлического привода 22, электрического привода 23 и/или параметры 10а, 11а окружающей среды, определяемые из окружающих условий, образуют параметры, учитываемые для оптимизированного управления системой 52 регулировки давления в шинах и, тем самым, для оптимальной настройки соответствующего давления р1, р2 в шинах.
Изменение давления р1, р2 в шинах влияет на положение кривой 43, 43' тягового усилия на графике 42 характеристик и, тем самым, на передаваемую мощность. Кривые постоянного удельного энергопотребления могут быть рассчитаны для определенного рабочего состояния для известной конфигурации силового агрегата. Соответствующие рабочие состояния в описанном варианте осуществления могут быть определены, например, по следующим параметрам:
- отличающаяся нагрузка на двигатель
- отличающееся давление в шинах
- отличающееся управление вспомогательным механизмом 19
- выходная мощность приводного двигателя 16
- выходная мощность коробки 17 передач или степень загрузки коробки передач
- приводная мощность вспомогательного потребителя, определяемая по разности между выходной мощностью двигателя и выходной мощностью коробки передач с учетом графика характеристик эффективности коробки передач
- поток мощности в механизме отбора мощности
- поток мощности в гидравлическом приводе 22
- поток мощности в электрическом приводе 23
- положение подъема навесной системы 24 / рабочая глубина навесного орудия 3
- проскальзывание
- сигналы измерительных стержней подъемной навесной системы 24
- угол наклона трактора
К эксплуатационным параметрам силового агрегата 5 относится, в том числе, выходная мощность по меньшей мере одного приводного двигателя 16, выходная мощность коробки 17 передач или степень загрузки коробки передач, приводная мощность по меньшей мере одного вспомогательного механизма 19 и/или по меньшей мере одного механизма 18 отбора мощности, проскальзывание, частота вращения двигателя, скорость движения, передаточное отношение, статус полного привода и/или блокировки дифференциала и/или поток мощности в механизме 18 отбора мощности, гидравлическом приводе 22 или электрическом приводе 23. Например, приводная мощность по меньшей мере одного вспомогательного агрегата 19 может быть определена по разности между выходной мощностью приводного двигателя 16 и выходной мощностью коробки 17 передач с учетом графика эффективности коробки передач.
К прочим эксплуатационным параметрам тягача 1 относится, в том числе, угол наклона тягача 1 в поперечном и продольном направлениях, масса тягача 1, балластировка, размер и тип шин 50, 51 на осях 48, 49, нагрузки на оси, усилия на колесах, крутящие моменты колес, параметры тяги, которые могут быть измерены одним из датчиков 25, 26 или рассчитаны на основании данных, полученных датчиками 25, 26, или иных полученных или сохраненных данных.
Кроме того, к эксплуатационным параметрам навесного орудия 3 может относиться вид и/или тип навесного орудия 3, рабочая ширина, положение подъема, рабочая глубина и прочие установочные параметры навесного орудия 3, например, ширину передней борозды, точку приложения тягового усилия, усилие на опоре и многое другое.
К параметрам 10а, 11а окружающей среды относится, в том числе, вид грунта, тип грунта, состояние грунта, влажность грунта, рельеф, погодные условия и многое другое.
Стратегия управления «Эффективность» оптимизирует расход топлива на единицу площади, причем рабочая точка 46, 46' на n-мерном графике 42 характеристик лежит в диапазоне минимально возможного удельного расхода топлива с учетом эксплуатационных параметров и параметров 10а окружающей среды. Стратегия управления «Производительность» оптимизирует производительность на единицу площади, причем рабочая точка 46, 46' на n-мерном графике 42 характеристик лежит в диапазоне максимальной мощности двигателя с учетом эксплуатационных параметров и параметров 10а окружающей среды. Для этого давление р1, р2 в шинах изменяют в соответствии с выбранной стратегией управления путем управления системой 52 регулировки давления в шинах.
В соответствии с графиком 42 характеристик, показанным на фиг.4, автоматическое устройство 27 регулировки давления в шинах оптимизирует целевой параметр оптимизации «Расход на единицу площади» путем изменения давления p1 в шинах на давление р2 в шинах таким образом, чтобы установилась рабочая точка 46', лежащая на кривой 44 потребности в тяговом усилии навесного орудия 3 при полной нагрузке ближе к диапазону минимально возможного удельного расхода топлива на графике 42 характеристик.
Вычислительный блок 7 может регулировать по меньшей мере один n-мерный график 42 характеристик во время текущей работы, в частности, циклически, с учетом условий эксплуатации тягача 1. Для этого в запоминающем блоке 8, предпочтительно, может быть сохранен по меньшей мере один n-мерный исходный график 42' характеристик. Таким образом, вычислительный блок 7 системы 6 помощи водителю может выполнить определение на основании исходного графика 42' характеристик при первом определении давления р1, р2 в шинах.
Кроме того, вычислительный блок 7 может быть выполнен с возможностью адаптации отображения исходного графика 42' характеристик к существующим условиям эксплуатации путем использования измеренных эксплуатационных параметров и параметров 10а окружающей среды или приближения к опорным точкам на исходном графике 42' характеристик. Исходя из исходного графика 42' характеристик, можно адаптировать отображение графика 42 характеристик к текущим условиям эксплуатации, настроив заданные рабочие точки, отражающие опорные точки на графике 42 характеристик. Для этого на первом этапе расчетные значения или эксплуатационные параметры и параметры 10а окружающей среды получают с помощью соответствующих датчиков 25, 26, 53, а также принимают в виде внешней информации 11 и предварительно обрабатывают вычислительным блоком 7. Если расчетные значения, например, частоты вращения, усилия, проскальзывание, скорость движения, представляются постоянными, их вводят в n-мерный исходный график 42' характеристик. Если отдельные расчетные значения, определенные датчиками 25, 26, отсутствуют в n-мерном пространстве исходного графика 42' характеристик, поскольку они недоступны при регулярном движении по полю или дороге или доступны лишь в недостаточной степени, так как не достигаются при стандартной эксплуатации тягача 1, то вместо них можно активно использовать определенные опорные точки. Второй этап включает проверку и адаптацию функциональной модели тягача 1 и навесного орудия 3 на основании изменения текущих условий эксплуатации, которые, в свою очередь, определяются как эксплуатационными параметрами, так и параметрами 10а окружающей среды.
На фигуре 5 для примера показан n-мерный исходный график 42' характеристик, адаптированный на примере изменения по меньшей мере одного эксплуатационного параметра в силовом агрегате 5. Под эксплуатационным параметром понимают, например, частоту вращения вспомогательного агрегата 19, выполненного в виде вентилятора двигателя, которая увеличивается во время работы в зависимости от нагрузки на приводной двигатель 16, что показано на фиг.5 стрелкой 47. Увеличение 47 частоты вращения вентилятора двигателя приводит к адаптации исходного графика 42' характеристик к графику 42 характеристик или адаптированному графику 42'' характеристик.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 тягач
2 трактор
3 навесное орудие
4 почвообрабатывающее орудие
5 силовой агрегат
6 система помощи водителю
7 вычислительный блок
8 запоминающий блок
9 блок ввода/вывода
10 информация
10а параметры окружающей среды
11 внешняя информация
11а внешние параметры окружающей среды
12 информация
13 управляющее устройство
14 управляющее устройство
15 управляющий блок
16 приводной двигатель
17 коробка передач
18 механизм отбора мощности
19 вспомогательный механизм
20 блок управления двигателя
21 блок управления коробки передач
22 гидравлический привод
23 электрический привод
24 подъемная навесная система
25 датчик
26 датчик
27 автоматическое устройство регулировки давления в шинах
28 свод правил
29 внешний вычислительный блок
30 стратегия управления
31 эффективность
32 производительность
33 целевой параметр оптимизации
34 производительность на единицу площади
35 расход на единицу площади
36 урожайность на единицу площади
37 затраты на единицу площади
38 качество работы
39 оператор
40 диалоговый режим
41 автоматический режим
42 график характеристик
42' исходный график характеристик
42'' адаптированный график характеристик
43 кривая тягового усилия при p1
43' кривая тягового усилия при р2
44 кривая тягового усилия по 3, 4
45 кривая постоянного расхода топлива
46 рабочая точка
46' рабочая точка
47 стрелка
48 передняя ось
49 задняя ось
50 шина
51 шина
52 система регулировки давления в шинах
53 датчик давления
54 линия
Fтяг тяговое усилие тягача
р1 давление в шинах
р2 давление в шинах
Vpaб рабочая скорость
А управляющий сигнал
В управляющий сигнал
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕСНЫЙ ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ КОЛЕСНОГО ТЯГАЧА | 2020 |
|
RU2812028C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТЯГАЧ | 2020 |
|
RU2821862C2 |
| ТРАКТОР И СПОСОБ ЭКСПЛУАТАЦИИ ТРАКТОРА | 2021 |
|
RU2832217C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ТЯГАЧОМ И ПЛУГОМ | 2020 |
|
RU2816410C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАШИННЫЙ АГРЕГАТ | 2017 |
|
RU2749615C2 |
| КОЛЕСНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГАЧ | 1993 |
|
RU2096234C1 |
| КОРМОУБОРОЧНЫЙ КОМБАЙН И СПОСОБ ЭКСПЛУАТАЦИИ КОРМОУБОРОЧНОГО КОМБАЙНА | 2019 |
|
RU2786169C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2796063C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2667056C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ СИСТЕМА | 2013 |
|
RU2633559C2 |

Группа изобретений относится к колесному тягачу, в частности к трактору, системе помощи водителю для применения в тягаче и способу эксплуатации тягача. Тягач содержит: силовой агрегат, навесное орудие, систему помощи водителю. Силовой агрегат содержит: приводной двигатель, коробку передач, механизм отбора мощности, вспомогательное устройство. Система помощи водителю снабжена: вычислительным блоком, запоминающим блоком и блоком ввода-вывода данных, автоматической системой регулировки регулировки давления в шинах. Система регулировки регулировки давления в шинах работает на основе характеристических кривых. Автоматическая система регулировки регулировки давления в шинах выполнена с возможностью оптимизированного управления системой регулировки давления в шинах в зависимости от выбираемых стратегий управления и/или целевых параметров оптимизации, хранящихся в запоминающем блоке. Достигается оптимизация настройки давления в шинах тягача и адаптированного навесного орудия. 3 н. и 16 з.п. ф-лы, 5 ил.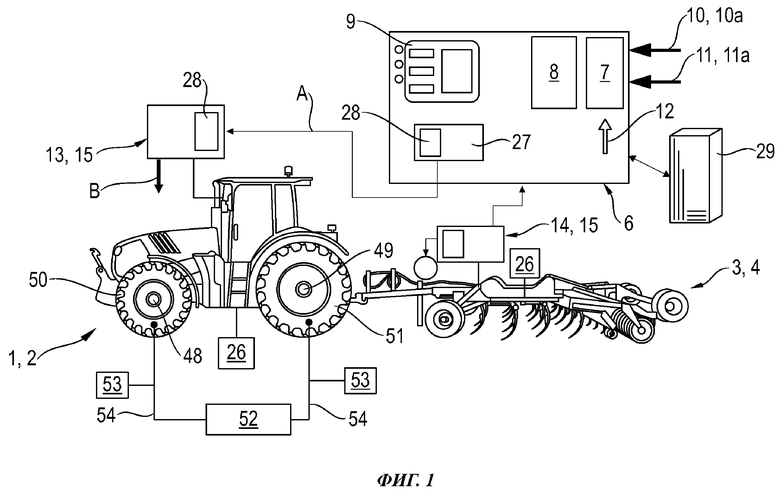
1. Тягач (1), в частности трактор (2), с силовым агрегатом (5) и системой (52) регулировки давления в шинах для установки и адаптации давления (p1, р2) по меньшей мере в одной шине (50, 51) тягача (1), а также по меньшей мере с одним навесным орудием (3, 4), адаптированным к тягачу (1), причем силовой агрегат (5) содержит по меньшей мере один приводной двигатель (16), коробку (17) передач, по меньшей мере один механизм (18) отбора мощности и по меньшей мере один вспомогательный механизм (19), отличающийся тем, что для управления системой (52) регулировки давления в шинах тягач (1) оснащен системой (6) помощи водителю, содержащей вычислительный блок (7), запоминающий блок (8) и блок (9) ввода/вывода, причем система (6) помощи водителю содержит автоматическое устройство (27) регулировки давления в шинах, работающее на основании характеристических кривых, причем автоматическое устройство (27) регулировки давления в шинах выполнено с возможностью оптимизированного управления системой (52) регулировки давления в шинах в зависимости от выбираемых стратегий (30) управления и/или целевых параметров (33) оптимизации, хранящихся в запоминающем блоке (8).
2. Тягач (1) по п. 1, отличающийся тем, что система (52) регулировки давления в шинах вместе с системой (6) помощи водителю образуют автоматическое устройство (27) регулировки давления в шинах, причем вычислительный блок (7) выполнен с возможностью автономного определения параметра, влияющего на устанавливаемое давление (p1, р2) в шинах, и его передачи в систему (52) регулировки давления в шинах для реализации выбранной стратегии (30) управления и/или целевого параметра (33) оптимизации.
3. Тягач (1) по одному из пп. 1 или 2, отличающийся тем, что ыбираемая стратегия (30) регулирования содержит по меньшей мере одну стратегию регулирования «Эффективность» (31) или «Производительность» (32).
4. Тягач (1) по одному из пп. 1-3, отличающийся тем, что целевыми параметрами (33) оптимизации являются «Производительность на единицу площади» (34), «Расход на единицу площади» (35), «Урожайность на единицу площади» (36), «Затраты на единицу площади» (37) и/или «Качество работы» (38).
5. Тягач (1) по одному из предыдущих пунктов, отличающийся тем, что автоматическое устройство (27) регулировки давления в шинах выполнено с возможностью оптимизации эффективности тяги тягача (1) в зависимости от выбранной стратегии (30) управления и/или целевого параметра (33) оптимизации.
6. Тягач (1) по одному из предыдущих пунктов, отличающийся тем, что автоматическое устройство (27) регулировки давления в шинах выполнено с возможностью оптимизации давления (p1, р2) в шине конкретного колеса и/или конкретной оси, и/или всех колес.
7. Тягач (1) по одному из предыдущих пунктов, отличающийся тем, что параметрами, которые необходимо учитывать для оптимизированного управления системой (52) регулировки давления в шинах, являются эксплуатационные параметры тягача (1), силового агрегата (5), навесного орудия (3, 4) и/или параметры (10а, 11а) окружающей среды, определяемые из окружающих условий.
8. Тягач (1) по п. 7, отличающийся тем, что на тягаче (1) установлены датчики (25, 26, 53), выполненные с возможностью определения эксплуатационных параметров и/или параметров (10а, 11а) окружающей среды.
9. Тягач (1) по одному из пп. 7 или 8, отличающийся тем, что эксплуатационные параметры тягача (1) включают в себя выходную мощность по меньшей мере одного приводного двигателя (16), выходную мощность или степень загрузки коробки (17) передач, приводную мощность по меньшей мере одного вспомогательного механизма (19) и/или по меньшей мере одного механизма (18) отбора мощности, проскальзывание, скорость движения, передаточное отношение, поток мощности в гидравлическом приводе, тип навесного орудия и/или установочный параметр навесного орудия (3, 4).
10. Тягач (1) по одному из предыдущих пунктов, отличающийся тем, что в запоминающем блоке сохранена функциональная модель тягача (1) и навесного орудия (3, 4), по меньшей мере частично отражающая функциональные взаимосвязи тягача (1) и навесного орудия (3, 4).
11. Тягач (1) по одному из предыдущих пунктов, отличающийся тем, что для отображения функциональных взаимосвязей тягача (1) эксплуатационному параметру «Давление (p1, р2) в шинах» назначен по меньшей мере один n-мерный график (42) характеристик, причем давление (p1, р2) в шинах задано как выходной параметр по меньшей мере одного n-мерного графика (42) характеристик.
12. Тягач (1) по п. 11, отличающийся тем, что по меньшей мере один или несколько эксплуатационных параметров тягача (1), навесного орудия (3, 4) и/или параметров (10а, 11а) окружающей среды, определяемых из окружающих условий, представляют собой входные параметры по меньшей мере одного n-мерного графика (42) характеристик.
13. Тягач (1) по одному из пп. 11 или 12, отличающийся тем, что вычислительный блок (7) выполнен с возможностью выбора по меньшей мере одного n-мерного графика (42) характеристик в зависимости от выбранной стратегии (30) управления и/или целевого параметра (33) оптимизации и принятия его за основу для определения давления (p1, р2) в шинах.
14. Тягач (1) по одному из пп. 11-13, отличающийся тем, что вычислительный блок (7) выполнен с возможностью сопоставления по меньшей мере одного n-мерного графика (42) характеристик во время текущей работы, в частности, циклически, с условиями эксплуатации тягача (1), причем предпочтительно в запоминающем блоке (8) сохранен по меньшей мере один n-мерный исходный график (42') характеристик, причем вычислительный блок (7) выполнен с возможностью, при первом определении давления (p1, р2) в шинах, осуществления определения на основании исходного графика (42') характеристик.
15. Тягач (1) по п. 14, отличающийся тем, что вычислительный блок (7) выполнен с возможностью адаптации отображения исходного графика (42') характеристик к существующим условиям эксплуатации путем использования измеренных эксплуатационных параметров по меньшей мере тягача (1) или перехода к опорным точкам на исходном графике (42') характеристик.
16. Система (6) помощи водителю с автоматическим устройством (27) регулировки давления в шинах для использования в тягаче (1, 2) по одному из предыдущих пунктов.
17. Система (6) помощи водителю по п. 16, отличающаяся тем, что система (6) помощи водителю реализована на базе облачного сервиса данных.
18. Система (6) помощи водителю по пп. 16 или 17, отличающаяся тем, что система (6) помощи водителю содержит мобильное устройство передачи данных.
19. Способ эксплуатации тягача (1), в частности трактора (2), с силовым агрегатом (5) и системой (52) регулировки давления в шинах для установки и адаптации давления (p1, р2) по меньшей мере в одной шине (50, 51) тягача (1) и по меньшей мере с одним адаптированным к тягачу (1) навесным орудием (3, 4), причем силовой агрегат (5) содержит по меньшей мере один приводной двигатель (16), коробку (17) передач, по меньшей мере один механизм (18) отбора мощности и по меньшей мере один вспомогательный механизм (19), отличающийся тем, что тягачом (1) управляют посредством системы (6) помощи водителю, содержащей вычислительный блок (7), запоминающий блок (8) и блок (9) ввода/вывода, причем системой (52) регулировки давления в шинах управляют посредством автоматического устройства (27) регулировки давления в шинах системы (6) помощи водителю, работающего на основании характеристических кривых, причем автоматическое устройство (27) регулировки давления в шинах используют для оптимизированного управления системой (52) регулировки давления в шинах в зависимости от выбираемых стратегий (30) управления и/или целевых параметров (33) оптимизации, хранящихся в запоминающем блоке (8).
| DE 102016118203 A1, 16.11.2017 | |||
| EP 3195719 B1, 24.10.2018 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
