Изобретение относится к текстильному машиностроению и может быть использовано для выработки трехосных тканей.
Известен ткацкий станок для трехосного ткачества [Патент US 4 013 103, D03C 13/00 Triaxial weaving machine with heddle transferand method / KAROLKULCZYCKI, PARSIPPANY,N.J.; BURNSDARSIE, ROCKFORD, III - 22.09.1977]. Ткацкий станок имеет размещенные в пазах на раме ткацкого станка вдоль по утку множество удлиненных галев, служащих для продольного перемещения нитей основы для формирования зева, в который прокладывается уточная нить, и поперечного перемещения нитей основы вдоль утка для формирования трехосной ткани. При этом ряды удлиненных галев занимают по существу горизонтальное положение и перемещаются горизонтально во время их продольных зевообразующих перемещений, а крайние удлиненные галева взаимодействуют с поворотным устройством для изменения направления удлиненных галев придвижении их по замкнутому контуру. Недостатком станка является высокая сложность, вызванная обеспечением высокой точности изготовления направляющих пазов для перемещения удлиненных галев зевообразовательного механизма, механизма поворота галев двухрядного размещения в крайних положениях, что снижает надежность и скоростной режим работы ткацкого станка, увеличивает его габариты, двурядное размещения галев с каждой стороны ограничивает виды переплетений, возможных к использованию на данном станке, а, значит, снижает ассортиментные возможности. При этом горизонтальное положение удлиненных галев и перемещение нитей основы для образования зева, а, следовательно, вертикальная подача основы в зону формирования исключает горизонтальное продвижение основы от подающих паковок до грудницы, что делает невозможным использование предложенной технологии в горизонтальном ткачестве и значительно усложняет обслуживание ткацкого станка с целью поддержания технологического процесса.
Известен ткацкий станок [Loom TW-200 to generate a three-dimensional tissues. Trost. W. TriaxialeWtbmaschineTW-2000. "Chemiefasern" Textil-Industrie, 1977, vol27/79, 5, S. 444-446, Expressinformation "Textile industry abroad", 1977, 32, Createrepo, Moscow] для выработки трехосных тканей, при выработке которых используются три системы нитей-две основных и одна уточная, расположенные друг относительно друга под углом 60°. Станок состоит из двух частей: непосредственно ткацкого станка и устройства для основы. Над станком установлена вращающаяся карусель, где размещены восемь секционных навоев. Нити с этих навоев огибают направляющий валик, связанный с тормозами для каждого из восьми навоев, после чего проходят к четырем рядам открытых ламелей основонаблюдателя. Затем нити входят в гибкие трубочки, являющиеся частью системы компенсации длины основных нитей. Для каждой из основ устанавливается 80 трубочек. После прохождения системы компенсации нити разделяются на два части: переднюю и заднюю. Вертикальная подача основы в зону формирования исключает возможность использования данного устройства в горизонтальном ткачестве, использование гибких трубочек в системе компенсации затрудняет обслуживание станка в случае обрыва нити основы.
Известен ткацкий станок для трехосного ткачества [Патент US 4 066 104, D03D 41/00 TRIAXIAL FABRIC FORMING MACHINE AND COMPONENTS THEREOF/ Inventors: Murray Halton, Bryn Mawr; Norris F. Dow, Radnor; Richard M. Dow; Michael J. Hillebrand, both of Philadelphia, all of Pa. [73] Assignee: N. F. Doweave, Inc., KingofPrussia, Pa. - 03.01.1978], который содержит вертикально ориентированное средство подачи нити основы и систему компенсации длины основных нитей, основанную на направляющих для основных паковок, перемещаемых по траектории в форме кулачка, с целью поддержания относительно постоянной длины пути от основной паковки до зоны формирования трехосной ткани для всех нитей основы. Вертикальная подача основы в зону формирования усложняет обслуживание ткацкого станка при его заправке и обрыве основных нитей, и исключает возможность использования данной технологии при горизонтальном ткачестве, а, следовательно некоторых механизмов и привода ткацкого станка с горизонтальным продвижением основы, система компенсации длины основных нитей, базируемая на перемещении паковок с нитями основы по заданной траектории в форме кулачка, не обеспечивает компенсации длины каждой основной нити, что приводит к разнонатянутости нитей основы и как следствие к повышению обрывности и нарушению технологического процесса тканеформирования.
В качестве прототипа принят ткацкий станок для выработки трехосевых тканей [Патент Р.Ф. №2181153, D03C 13/00, 7/00. Ткацкий станок / КАРЕВА Т.Ю., НИКОЛАЕВ С.Д., ЕРОХИН Ю.Ф., - 10.04.2002]. Ткацкий станок содержит ремизный зевообразовательный механизм с элементами для заправки систем нитей основы в виде стержней с отверстиями, установленными на одинаковом расстоянии друг от друга на горизонтальных подвижных планках рамы зевообразовательного механизма, содержащего механизм для перемещения этих планок поперек ткацкого станка в противоположных направлениях и батанный механизм с жесткозакрепленным на тем бердом, выполненным в виде гребенки, с возможностью горизонтального, качательного и возвратно-поступательного движения, кинематически связанного с одной из подвижных планок зевообразовательного механизма. Недостатком ткацкого станка является конструктивно ограниченное количество перемещений подвижных планок зевообразовательного механизма, а следовательно и стержней с нитями основы поперек ткацкого станка (вдоль утка), конструкция берда ,жестко связанного с подвижными планками , не обеспечивает возможность перемещения систем нитей по всей ширине ткацкого станка, подача нитей основы в зону формирования исключает возможность формирования ткани с перемещением нитей основы с одного края полотна до другого и обратно, а, следовательно, получение трехосной ткани, что исключает возможность использования данного ткацкого станка для производства трехосных технических тканей и тканей специального назначения, к которым предъявляются повышенные требования к разрывным характеристикам.
Технической задачей заявляемого изобретения является возможность вырабатывать на ткацком станке с горизонтальной подачей нитей основы трехосные ткани с повышенной прочностью и износостойкостью за счет увеличения числа связей нитей основы друг с другом и с нитями утка по всей ширине тканого полотна, расширение ассортиментных возможностей вследствие использования разных видов переплетений нитей основы с нитями утка, повышения производительности за счет увеличения количества прокладываемых уточных нитей за цикл тканеформирования, уменьшение обрывности нитей основы и выравнивание натяжения нитей основы по всей ширине полотна за счет системы компенсации длины каждой нити основы в зависимости от ее положения по ширине ткацкого станка и обеспечение параллельного расположения нитей основы в зоне зевообразования при перемещении их поперек ткацкого станка за счет введения нитенаправителя.
Технический результат достигается тем, что в ткацком станке, содержащем ремизный зевообразовательный механизм с элементами для заправки систем нитей основы, которые выполнены в виде стержней с отверстиями и установлены на одинаковом расстоянии друг от друга, батанный механизм, содержащий бердо, которое выполнено с возможностью перехода нитей основы одной из систем из одного зуба в другой в противоположном направлении нитям основы другой системы и механизм подачи нитей основы в зону формирования, содержащий систему компенсации длины подаваемой нити основы, по изобретению зевообразовательный механизм для горизонтального перемещения выполнен в виде контактирующих ременных передач с полуотверстиями, которые в зоне контакта ремней образуют отверстия для возможного горизонтального перемещения стержней с глазками за пяты, при этом зевообразовательный механизм снабжен поворотными устройствами для перемещения стержней по замкнутому контуру, а бердо выполнено в виде червяка с профилированными гранями в виде зубьев открытого берда, с шагом граней витков, равным 200/Ро, жестко закрепленного на батане с возможностью вращательного и качательного движения, причем вращение червяка синхронизировано с перемещением отверстий нижней контактирующей ременной передачи зевообразовательного механизма. Механизм подачи нитей основы обеспечивает сматывание нитей основы с секционных валиков, имеющих принудительное вращение, жестко установленных на зубчатом колесе с возможностью вращения его вокруг горизонтальной оси против часовой стрелки, при этом вращение колеса синхронизировано с перемещением пар контактирующих ременных передач зевообразовательного механизма. При этом механизм подачи имеет систему компенсации длины каждой основной нити, что обеспечивает равное натяжение всех нитей основы независимо от их местоположения по ширине ткацкого станка и нитенаправитель для создания зоны параллельного расположения нитей основы от нитенаправителя до стержней с глазками для нитей основы зевообразовательного механизма, что обеспечивает точное расположение систем нитей по ширине ткацкого станка в зоне зевообразования и предотвращает возможную обрывность нитей. Системы нитей основы по ходу с секционных валиков имеют зону, в которой все нити основы расположены радиально относительно нитенаправителя, зону, в которой все нити основы расположены параллельно между собой и зону, в которой перекрещенные нити основы переплетаются между собой и с системой нитей утка.
Сущность изобретения заключается в том, что ткацкий станок содержит механизм подачи нитей основы в зону формирования с секционных валиков, имеющих принудительное движение от электродвигателя, зафиксированных на зубчатом колесе с возможностью вращения его вокруг горизонтальной оси против часовой стрелки замкнутому контуру для обеспечения перемещения стержней с глазками с пробранными нитями основы. При этом вращение колеса синхронизировано с перемещением пар контактирующих ременных передач зевообразовательного механизма. Механизм подачи нитей основы имеет систему компенсации длины каждой основной нити, выбирающий лишнюю длину нити при прохождении через центр полотна и отпускающий в зону формирования запасенную длину по мере продвижения нити основы к краям ткани. При этом в крайнем правом или левом положениях нитей компенсатор полностью отдает весь запас запасенной в центре полотна длины, что обеспечивает равное натяжение всех нитей основы независимо от их местоположения по ширине ткацкого станка. Механизм подачи нитей основы снабжен нитенаправителем для создания зоны параллельного расположения нитей основы от нитенаправителя до стержней с глазками зевообразовательного механизма для нитей основы, что обеспечивает равномерное и точное расположение нитей основы по ширине ткацкого станка в зоне зевообразования и предотвращает возможную их обрывность. Нитенаправитель обеспечивает синхронное и соосное перемещение основных нитей, пробранных в глазки плашек нитенаправителя и глазки стрежней зевообразовательного механизма по всей ширине полотна, включая крайние положения стрежней, то есть в зоне поворотных устройств. Это обеспечивает параллельное расположение нитей основы в зоне формирования и снижает их обрывность. Ткацкий станок содержит ремизный зевообразовательный механизм в виде контактирующих ременных передач с полуотверстиями для горизонтального перемещения нитей основы. Контактирующие ременные передачи с полуотверстиями в зоне контакта ремней образуют отверстия для возможного горизонтального перемещения стержней с глазками для нитей основы за пяты, при этом в одной из соседних рам зевообразовательного механизма парная ременная передача размещена в верхней ее части и обеспечивает перемещение отверстий справа на лево, а в другой - в нижней ее части и обеспечивает перемещение отверстий слева направо. Также механизм имеет поворотные устройства для перемещения стержней по замкнутому контуру для возможности формирования трехосной ткани, согласно [Патент Р.Ф. №2806965, D03C 7/00, 13/00 Зевообразовательный механизм для формирования трехосной ткани/Карева Т.Ю., Кожевникова Л.В., Кожевников С.О., Карев Ф.М., Кожевников Ю.С., Кожевникова Н.С., Щекотов С.В. - 08.11.2023, Бюл. №31].
Ткацкий станок содержит батанный механизм, с бердом, выполненным в виде червяка с профилированными гранями с открытыми зубьями для возможности перехода нитей основы одной из систем из одного зуба в другой в противоположном направлении нитям основы другой системы, с шагом граней витков, равным 200/Ро, где Ро -плотность расположения нитей основы в ткани, нит./дм. При этом бердо жестко закреплено на батане с возможностью вращательного движения и для контроля перемещения нитей основы из одной системы нитей основы в другую (поперек ткацкого станка). Также бердо совершает качательные движения для прибоя проложенной уточной нити, а вращение червяка синхронизировано с перемещением отверстий нижней контактирующей ременной передачей зевообразовательного механизма.
Системы нитей основы по ходу движения с секционных валиков имеют зону, в которой все нити основы расположены радиально относительно нитенаправителя, обеспечивая таким образом движение подаваемых нитей основы по замкнутому контуру, затем зону, от нитенаправителя до стержней зевообразовательного механизма, в которой все нити основы расположены параллельно между собой для равномерного (точного) расположения основы нитей разных систем между собой (поперек ткацкого станка), и зону от нижней контактирующей ременной передачи до опушки ткани, в которой перекрещенные нити основы переплетаются между собой и с системой нитей утка, в которой происходит формирование трехосной ткани.
Боевой механизм и механизм отвода ткани из зоны формирования может быть любым из существующих и применяемых на ткацких станках с горизонтальным перемещением нитей основы от паковки до опушки ткани.
Изобретение проиллюстрировано, где изображено:
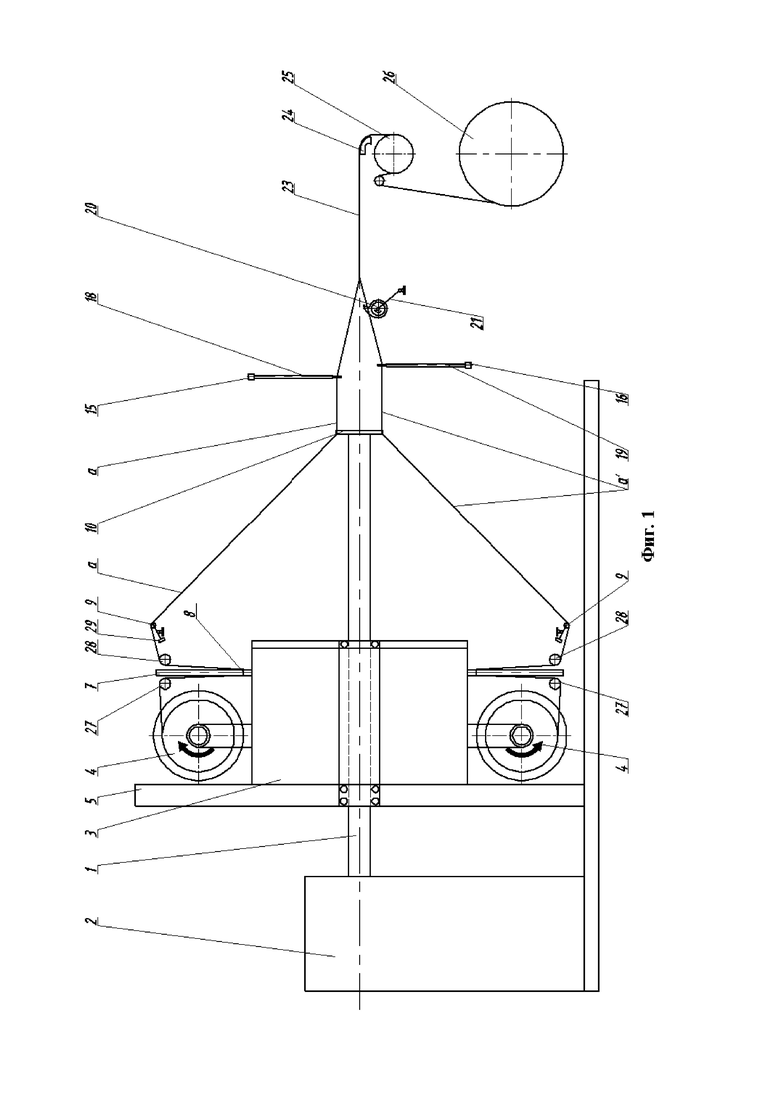
на фиг. 1 - технологическая схема заправки основных нитей на станке;
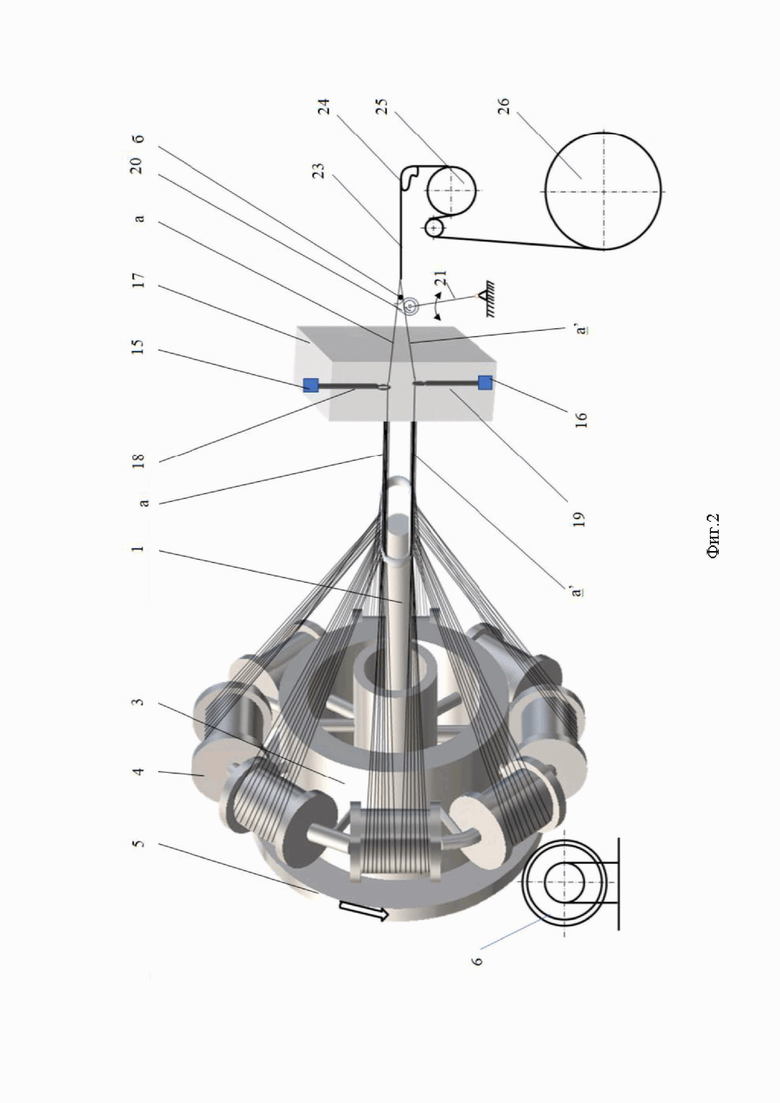
на фиг. 2 -схема заправки нитей основы с секционных валиков в нитенаправитель;
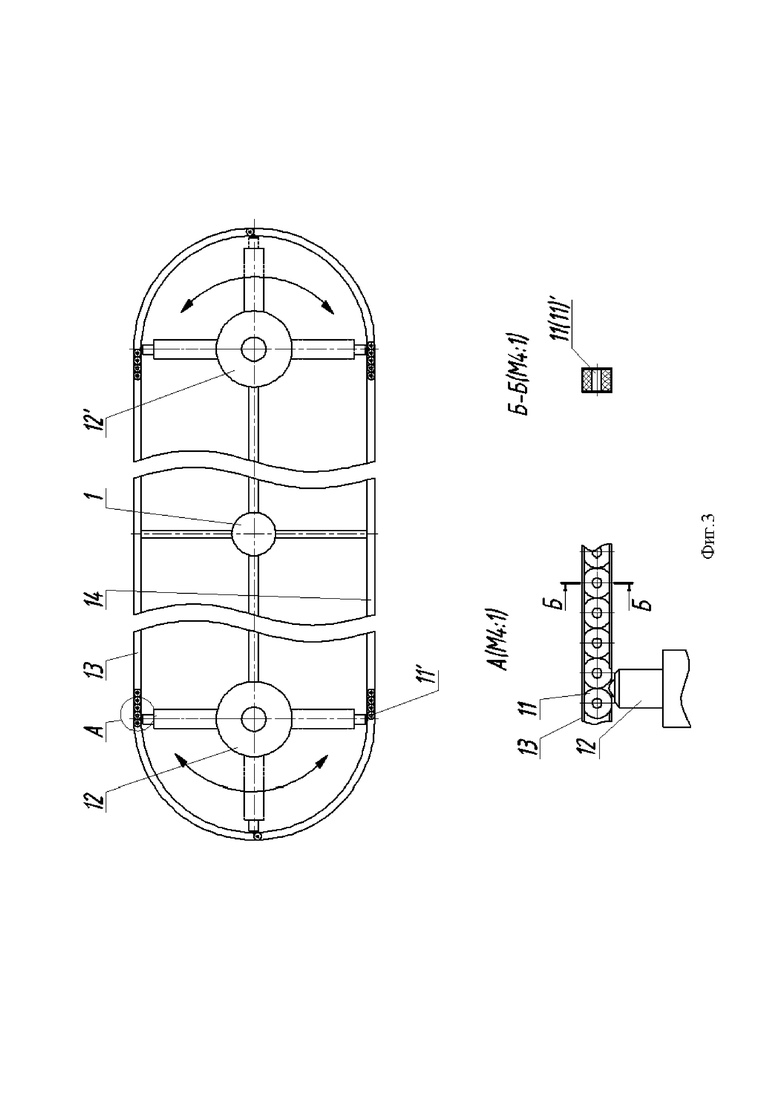
на фиг. 3 - кинематическая схема нитенаправителя;
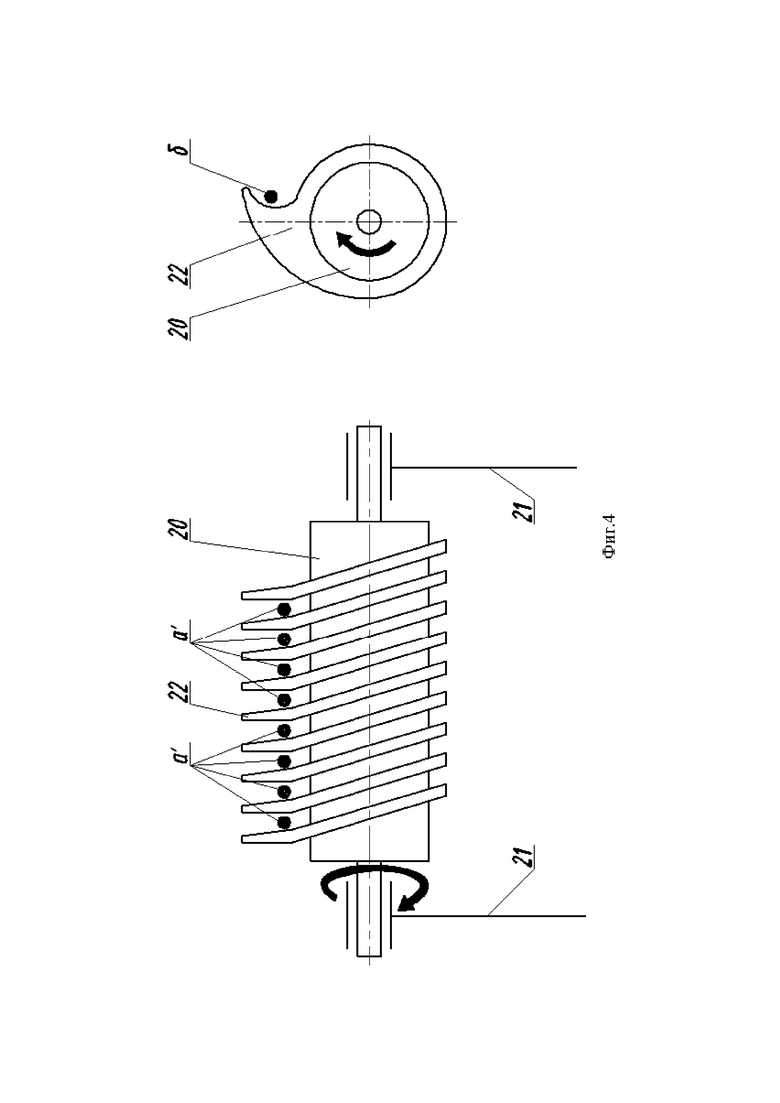
на фиг. 4 -схема червяка;
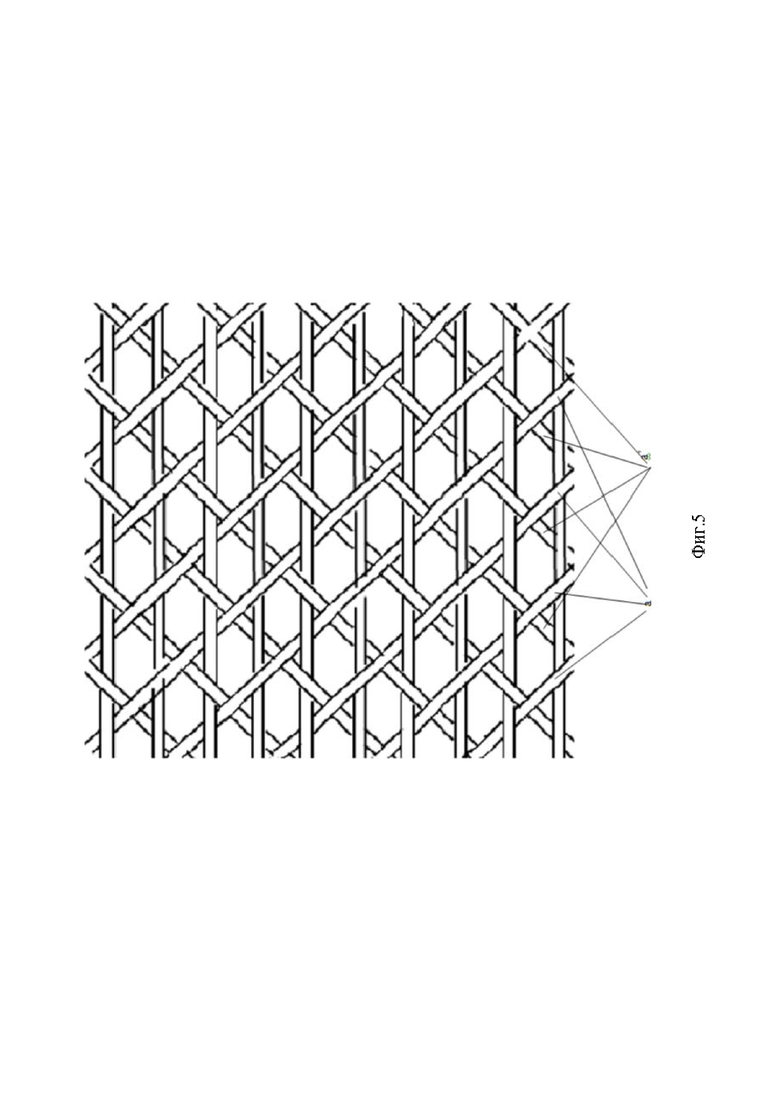
на фиг. 5 - схема трехосной ткани с переплетением нитей основы с нитями утка, формируемой при прокладывании уточной нити в каждый зев;
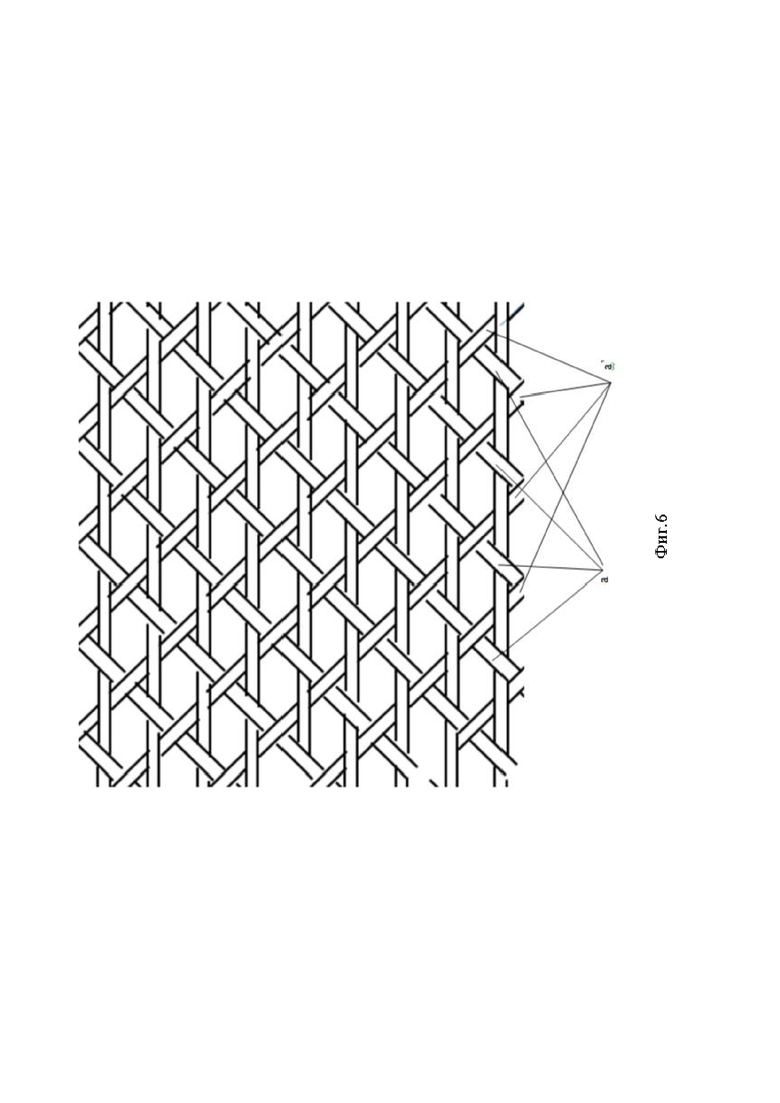
на фиг. 6 - схема трехосной ткани без переплетения нитей основы с нитями утка, формируемой при прокладывании уточной нити через зев.
На валу 1 стойки 2 свободно посажено колесо 3 с жестко закрепленными на нем секционными валиками 4, имеющими возможность вращательного движения от электродвигателя для подачи нитей основы в зону формирования систем нитей основы а и а’, причем колесо 3 имеет зубчатый венец 5 для вращения колеса против часовой стрелки от электродвигателя 6 с целью перемещения систем нитей основы а и а’ по замкнутому контуру (фиг. 1, фиг. 2). На колесе 3 жестко закреплены стойки 7 устройства компенсации длины нити основы, которые имеют направляющие с глазками 8 для нитей основы (фиг. 1). Глазки имеют возможность вертикального принудительного перемещения в пазах посредством кабелей повышенной гибкости от программного блока, и обеспечивают вертикальное перемещение каждой нити основы посредством глазка в зависимости от местоположения секционного валика с которого она сходит относительно центральной продольной линии трехосной ткани. Для контроля наличия основной нити в компенсирующей системе предусмотрены датчики в виде двуплечих рычагов, на одном конце которого посажен ролик 9, контактирующий с нитью основы, на другом противовес, рассчитываемый в зависимости от технологического натяжения нитей основы.
На валу 1 зафиксирован нитенаправитель 10 в глазки плашек 11 которого пробираются нити основы систем а и а’ (фиг. 3). Привод 12 c левой стороны нитенаправителя перемещает плашки по направляющей с верхней части 13 нитенаправителя 10 в нижнюю часть 14 нитенаправителя 10 (сверху вниз) (фиг. 3). Причем работа привода 12 синхронна с работой коромысла, перемещающего стержни зевообразовательного механизма с верхней ременной пары 15 к нижней ременной паре 16 зевообразовательного механизма 17 (соответственно 5, 6 и V, VI согласно [Патент Р.Ф. №2806965, D03C 7/00, 13/00 Зевообразовательный механизм для формирования трехосной ткани/Карева Т.Ю., Кожевникова Л.В., Кожевников С.О., Карев Ф.М., Кожевников Ю.С., Кожевникова Н.С., Щекотов С.В.-08.11.2023, Бюл. №31]). Привод 12’ с правой стороны нитенаправителя перемещает плашки по направляющей с нижней части 14 нитенаправителя 10 в верхнюю часть 13 нитенаправителя 10 (снизу вверх) (фиг. 3), причем работа привода 12’ синхронна с работой коромысла, перемещающего стержни зевообразовательного механизма от нижней ременной пары 16 к верхней ременной паре 15 (соответственно V, VI и 5, 6 согласно [Патент Р.Ф. №2806965, D03C 7/00, 13/00 Зевообразовательный механизм для формирования трехосной ткани/Карева Т.Ю., Кожевникова Л.В., Кожевников С.О., Карев Ф.М., Кожевников Ю.С., Кожевникова Н.С., Щекотов С.В.-08.11.2023, Бюл. №31]). При этом приводы 12 и 12’ имеют возвратно-вращательное движение, одинаковую длину и по устройству не отличаются друг от друга и могут быть взаимозаменяемыми. Перемещение плашек по направляющим в верхней 13 и нижней 14 частях нитенаправителя 10 обеспечено работой приводов 12 и 12’ и плотным примыканием плашек друг к другу в верхней и нижней частях нитенаправителя. Расстояние между глазками плашек равно 200/Ро, где Ро - плотность трехосной ткани по основе нит./дм.
Образование зева осуществляет зевообразовательный механизм 17 (фиг. 2) согласно [Патент Р.Ф. №2806965, D03C 7/00, 13/00 Зевообразовательный механизм для формирования трехосной ткани/Карева Т.Ю., Кожевникова Л.В., Кожевников С.О., Карев Ф.М., Кожевников Ю.С., Кожевникова Н.С., Щекотов С.В. - 08.11.2023, Бюл. №31], в котором стержни 18 верхней ременной пары 15 перемещают нити основы а справа налево, стрежни 19 нижней ременной пары 16 перемещают нити основы а’ слева направо (фиг 1, фиг. 2).
Для прибоя уточной нити к опушке трехосной ткани, для обеспечения возможности перемещения нитей основы по всей ширине ткацкого станка, бердо выполнено открытым в виде однозаходного правого червяка 20 (фиг. 4). На лопастях батана 21, который выполняет качательное движение, закреплен червяк 20 с возможностью вращательного движения. При этом червяк 20 имеет профилированные грани 22, которые прибивают уточную нить б к опушке ткани (фиг. 4). Также конструкция червяка с шагом граней витков, равным 200/Ро, где Ро -плотность расположения нитей основы в ткани, нит./дм, обеспечивает постоянный контроль нитей основы а’, переносимых стержнями 19 нижней ременной пары 16 от левой кромки ткани к правой. Для этого вращение червяка синхронизировано с перемещением отверстий нижней ременной пары 16 зевообразовательного механизма 17.
Нить основы а - это нить, принадлежащая к системе нитей основы, которые перемещаются справа налево посредством стержней 18, в глазки которых они пробраны, верхней ременной пары 15, нити основы системы а’ - нити, перемещаемые слева направо посредством стержней 19, в глазки которых они пробраны, нижней ременной пары 16 (фиг. 1, фиг. 2). Любая нить основы, за счет перемещения по замкнутому контуру, периодически принадлежит то к системе нитей а, то к системе нитей а’.
На позициях 23, 24, 25, 26 (фиг. 1, фиг. 2) изображены ткань, грудница, вальян, товарный валик.
Ткацкий станок работает следующим образом.
Основные нити систем а и а’ (фиг. 1, фиг. 2) сматываются с секционных валиков 4, установленных на колесе 3, и через направляющий пруток 27 (фиг. 1) поступают в глазки 8 стойки 7 системы компенсации длины нитей (фиг. 1). При расположении нитей основы а и а’ в центре трехосной ткани глазки 8 (фиг. 1) принудительно от программного блока занимают такое положение, при котором возникает запас длины нитей основы. При расположении нитей основы а и а’ в крайнем левом (левая кромка) и крайнем правом (правая кромка) положениях глазки 8, принудительно от программного блока занимают такое положение, при котором нить основы расположена по прямой между направляющим прутком 27 и направляющим прутком 28, компенсируя разницу в длине нити основы в геометрии заправки между длиной нитей основы, расположенных в центре полотна и нитей основы, расположенных в кромках ткани. По мере вращения колеса 3 (фиг. 1, фиг. 2) с секционными валиками 4 вокруг оси 1 геометрия линии заправки нити основы меняется, соответственно глазки 8 (фиг. 1) принудительно от программного блока перемещают нити основы а и а’ в пазах вверх или вниз, обеспечивая компенсацию длины нити и равенство натяжения всех нитей основы. Из глазков 8 нити основы а и а’ через направляющие прутки 28 поступают на ролик 9 (фиг. 1), который выполняет роль датчика и обеспечивает контроль наличия нити основы в технологическом процессе, в случае обрыва нити основы под действием противовеса 29 нижним плечом замыкает цепь и останавливает технологический процесс. Далее нити основы а поступают в глазки плашек 11 верхней части 13 нитенаправителя 10 (фиг. 3), затем в глазки стержней 18 верхней ременной пары 15 (фиг. 1, фиг. 2), нити а’ поступают в глазки плашек 11’ нижней части 14 нитенаправителя 10 (фиг. 3), затем в глазки стержней 19 нижней ременной пары 16 (фиг. 1, фиг. 2). При этом глазки плашки 11 и стержня 18 в которые пробрана нить а, глазки плашки 11’ и стержня 19 в которые пробрана нить a’, и любая другая пара плашка-стержень, в которые пробрана одна и та же нить основы, всегда расположены на одной линии, параллельной продольной оси ткани и параллельно линиям плашка-стержень других нитей основы, что обеспечивает точное параллельное расположение нитей основы в зоне их перемещения относительно друг друга поперек ткацкого станка.
После глазков стержней 18 и 19 нити основы а и а’ поступают между профилированными гранями 22 червяка 20 (фиг. 4), а затем в зону формирования ткани, где осуществляется переплетение нитей основы между собой и с нитями утка, причем нити а’, образуя нижнюю ветвь зева, перемещаются нижней ременной парой 19 слева направо, не покидают грани червяка 20 (фиг. 4). Нити основы а, перемещаются верхней ременной парой 18, имеют возможность переходить в соседние витки червяка.
Ткацкий станок позволяет получать трехосные ткани как с переплетением нитей основы с нитями утка (фиг. 5), так и без переплетения нитей основы с нитями утка (фиг. 6), а также ткани с элементами с переплетением нитей основы с утком и без переплетения нитей основы с утком при наличии как минимум двух ремиз.
При формировании трехосной ткани с переплетением нитей основы с нитями утка (фиг. 5), ременная пара 15 посредством стрежней 18 (фиг. 1,фиг. 2) перемещает нити основы а в вертикальной плоскости вверх и в горизонтальной плоскости справа налево. Ременная пара 16 посредством стрежней 19 перемещает нити основы а’ в вертикальной плоскости вниз и в горизонтальной плоскости слева направо. Горизонтальное перемещение нитей основы происходит с момента, когда глазки стержней 18 и 19 находятся в одной горизонтальной плоскости, перемещение стержней 18 и 19 происходит синхронно в разные стороны. При этом система нитей основы а образует верхнюю ветвь первого зева, система нитей а’ - его нижнюю ветвь. Одновременно колесо 3 посредством электродвигателя 6 поворачивается против часовой стрелки на угол α, определяемый числом нитей и плотностью расположения нитей основы в трехосной ткани. Привод 12 (фиг. 3) перемещает крайнюю левую плашку 11 с нитью а из верхней части 13 нитенаправителя 10 в его нижнюю часть 14, одновременно крайний левый стержень 18 (фиг. 1,фиг. 2) с этой же нитью а переходит из верхней ременной пары 15 в нижнюю ременную пару 16, и одновременно привод 12’ перемещает крайнюю правую плашку 11’ из нижней части 14 нитенаправителя 10 в его верхнюю 13 часть (фиг. 3). Одновременно крайний правый стержень 19 (фиг. 1,фиг. 2) с той же нитью а’ переходит из нижней ременной пары 16 в верхнюю ременную пару 15 (согласно [Патент Р.Ф. №2806965, D03C 7/00, 13/00 Зевообразовательный механизм для формирования трехосной ткани/Карева Т.Ю., Кожевникова Л.В., Кожевников С.О., Карев Ф.М., Кожевников Ю.С., Кожевникова Н.С., Щекотов С.В.-08.11.2023, Бюл. №31]). Все плашки и стержни получают перемещение на расстояние 200/Ро, плашки верхней части 13 нитенаправителя 10 (фиг. 3) и стержни 18 верхней ременной пары 15 двигаются справа налево (фиг. 1,фиг. 2), а плашки нижней части 14 нитенаправителя 10 (фиг. 3) и стержни 19 (фиг. 1,фиг. 2) нижней ременной пары 16 - слева направо. Перемещение плашек и стержней происходит синхронно. В образованный зев вводится первая уточная нить б (фиг. 2), после чего она прибивается к опушке ткани профилированными гранями 22 червяка 20 (фиг 4). Червяк при этом находится в своем крайнем заднем положении (фиг 1), получает пульсационное вращательное движение и синхронно с перемещением плашек и стержней поворачивается на один оборот, что соответствует перемещению нитей а’ на расстояние 200/Ро. Каждая из нитей системы a’ расположена в своем пространстве между профилированными гранями 22 червяка 20 (фиг. 4). При качательном движении лопасти батана 21 (фиг. 4) в сторону опушки ткани и обратно червяк вращения не имеет. Одновременно с прибоем первой нити утка к опушке ткани происходит закрытие зева и образование нового второго зева за счет того, что стержни 19 ременной пары 16 перемещают нити основы а’ в вертикальной плоскости вверх. Стержни 18 ременной пары 15 перемещают нити основы а в вертикальной плоскости вниз, в результате чего прибитая к опушке ткани первая уточная нить закрепляется переплетенными нитями основы между собой и с нитями утка. Наработанный элемент ткани 23 отводится из зоны формирования. При этом система нитей основы а образует нижнюю ветвь второго зева, система нитей а’ - его верхнюю ветвь. В образованный зев прокладывается вторая нить утка, которая прибивается к опушке ткани профилированными гранями 22 червяка 20 (фиг. 4). В процессе прибоя второй уточной нити к опушке ткани происходит закрытие зева и образование нового зева за счет того, что стержни 18 ременной пары15 перемещают нити основы а в вертикальной плоскости вверх, стержни 19 ременной пары16 перемещают нити основы а’ в вертикальной плоскости вниз (фиг. 1, фиг. 2). После чего прибитая к опушке ткани уточная нить закрепляется переплетенными нитями основы между собой и с нитями утка. Цикл тканеформирования повторяется.
При формировании трехосной ткани без переплетения нитей основы с нитями утка (фиг. 6), ременная пара 15 посредством стрежней 18 перемещает нити основы а в вертикальной плоскости вверх и в горизонтальной плоскости справа налево, ременная пара 16 посредством стрежней 19 перемещает нити основы а’ в вертикальной плоскости вниз и в горизонтальной плоскости слева направо (фиг. 1, фиг. 2). При этом горизонтальное перемещение нитей основы происходит с момента, когда глазки стержней 18 и 19 находятся в одной горизонтальной плоскости и синхронно в разные стороны. Система нитей основы а образует верхнюю ветвь первого зева, система нитей а’ - его нижнюю ветвь. Колесо 3 посредством электродвигателя 6 поворачивается против часовой стрелки на угол α, определяемый числом нитей и плотностью расположения нитей основы в трехосной ткани. Привод 12 (фиг. 3) перемещает крайнюю левую плашку 11 с нитью а из верхней части 13 нитенаправителя 10 в его нижнюю часть 14, а крайний левый стержень 18 с этой же нитью а переходит из верхней ременной пары 15 в нижнюю ременную пару 16 (фиг. 1,фиг. 2). Одновременно привод 12’ (фиг. 3) перемещает крайнюю правую плашку 11’ из нижней части 14 нитенаправителя 10 в его верхнюю 13 часть, и крайний правый стержень 19 с той же нитью а’ переходит из нижней ременной пары 16 в верхнюю ременную пару 15 (фиг. 1,фиг. 2) (согласно [Патент Р.Ф. №2806965, D03C 7/00, 13/00 Зевообразовательный механизм для формирования трехосной ткани/Карева Т.Ю., Кожевникова Л.В., Кожевников С.О., Карев Ф.М., Кожевников Ю.С., Кожевникова Н.С., Щекотов С.В.-08.11.2023, Бюл. №31]). Все плашки и стержни получают перемещение на расстояние 200/Ро. Плашки верхней части 13 нитенаправителя 10 и стержни 18 верхней ременной пары 15 перемещают нити основы а справа налево, а плашки нижней части 14 нитенаправителя 10 и стержни 19 нижней ременной пары 16 перемещают нити основы а’ слева направо. Перемещение плашек и стержней происходит синхронно. В образованный зев уточная нить не вводится, и в зависимости от настройки батанного механизма бердо в виде червяка 20 с профилированными гранями 22 либо выстаивает в крайнем заднем положении (фиг 1), при котором нити основы системы а’ расположены между профилированными гранями червяка, а нити системы а расположены выше профилированных граней и имеют возможность перемещения в горизонтальной плоскости, либо совершает холостой прибой. При этом червяк в своем крайнем заднем положении (фиг 1) получает пульсационное вращательное движение и синхронно с перемещением плашек и стержней поворачивается на один оборот, что соответствует перемещению нитей а’ на расстояние 200/Ро. Каждая из нитей системы a’ при этом расположена в своем пространстве между профилированными гранями 22 червяка 20 (фиг. 4). При качательном движении лопасти батана 21 в сторону опушки ткани и обратно червяк вращения не имеет. Происходит закрытие зева и образование нового зева за счет того, что стержни 19 ременной пары 16 перемещают нити основы а’ в вертикальной плоскости вверх, стержни 18 ременной пары 15 перемещают нити основы а в вертикальной плоскости вниз. При этом система нитей основы а образует нижнюю ветвь зева, система нитей а’ - его верхнюю ветвь. В образованный второй зев прокладывается первая нить утка, которая прибивается к опушке ткани 23 (фиг. 1, фиг. 2) профилированными гранями 22 червяка 20 (фиг. 4). В процессе прибоя уточной нити к опушке ткани происходит закрытие зева и образование нового зева за счет того, что стержни 18 ременной пары 15 перемещают нити основы а в вертикальной плоскости вверх, стержни 19 ременной пары 16 перемещают нити основы а’ в вертикальной плоскости вниз. В результате чего прибитая к опушке ткани первая уточная нить закрепляется в ткани переплетенными между собой нитями основы и цикл тканеформирования повторяется.
Различные варианты последовательностей прокладывания или отсутствия уточной нити в первом зеве позволяют формировать трехосную ткань с участками, в которых нити основы переплетаются с нитями утка и где не переплетаются с нитями утка.
Системы нитей основы по ходу с секционных валиков имеют зону, в которой все нити основы расположены радиально относительно нитенаправителя, обеспечивая движение подаваемых нитей основы по замкнутому контуру, затем зону, от нитенаправителя до стержней зевообразовательного механизма, в которой все нити основы расположены параллельно между собой для точного расположения основы нитей разных систем между собой, и зону от нижней контактирующей ременной передачи до опушки ткани, в которой перекрещенные нити основы переплетаются между собой и с системой нитей утка, где происходит формирование трехосной ткани.
Особенностью ткани, получаемой при помощи предлагаемого ткацкого станка, является увеличение прочности, износоустойчивости за счет увеличения числа связей между собой нитей основы по всей ширине ткани с возможным закреплением их уточной нитью, а также возможное наличие участков ткани с переплетением нитей основы с уточными нитями и без переплетения с нитями утка. Это расширяет область применения таких тканей для бытового, технического и специального назначения.
Отличительными особенностями предлагаемого ткацкого станка являются возможность его использования на базе ткацкого станка с горизонтальным продвижением основы с модернизацией механизма подачи основы в зону формирования, зевообразовательного и батанного механизмов. Применение предлагаемого ткацкого станка позволит получать трехосные ткани как с переплетением нитей основы с нитями утка, так и без переплетения нитей основы с нитями утка, а также ткани с элементами с переплетением нитей основы с утком и без переплетения нитей основы с утком при наличии как минимум двух ремиз.
Отличительными особенностями ткацкого станка также являются:
- расположение основных валиков на вращающемся колесе, что обеспечивает движение нитей основы с паковок по замкнутому кругу, возможность формирования трехосной ткани,
- система компенсации длины нити, обеспечивающая выравнивание натяжения нитей основы по всей ширине ткани и уменьшение их обрывности, обеспечивает контроль наличия нити основы в технологическом процессе, и в случае обрыва подает сигнал на останов ткацкого станка;
- нитенаправитель, обеспечивающий параллельное расположение систем нитей по ширине ткацкого станка в зоне зевообразования и предотвращающий возможную обрывность нитей. Нитенаправитель обеспечивает синхронное и соосное перемещение основных нитей, пробранных в его элементы и глазки стержней зевообразовательного механизма;
- зевообразовательный механизм, обеспечивающий вертикальное перемещение нитей основы для образования зева и горизонтальное перемещение нитей основы двух систем в разные стороны, что определят движение нитей основы по замкнутому кругу и формирование трехосных тканей;
- бердо батанного механизма в виде червяка с профилированными гранями, обеспечивающее контролируемое перемещения нитей основы а’ нижней системы синхронно с перемещением стержней нижней ременной пары зевообразовательного механизма и возможность выхода нитей верхней системы а из пространства между профилированными гранями для перемещения их в горизонтальной плоскости стержнями верхней ременной пары.
Библиографический список.
1. Патент US 4 013 103, D03C 13/00 Triaxial weaving machine with heddle transfer and method / KAROL KULCZYCKI, PARSIPPANY,N.J.; BURNS DARSIE, ROCKFORD, III - 22.09.1977.
2. Loom TW-200togenerateathree-dimensionaltissues. Trost. W. TriaxialeWtbmaschineTW-2000. "Chemiefasern" Textil-Industrie, 1977, vol27/79, 5, S. 444-446, Expressinformation "Textileindustryabroad", 1977, 32, Createrepo, Moscow.
3. Патент US 4 066 104, D03D 41/00 TRIAXIAL FABRIC FORMING MACHINE AND COMPONENTS THEREOF/ Inventors: Murray Halton, Bryn Mawr; Norris F. Dow, Radnor; Richard M. Dow; Michael J. Hillebrand, both of Philadelphia, all of Pa. [73] Assignee: N. F. Doweave, Inc., KingofPrussia, Pa. - 03.01.1978.
4. Патент Р.Ф.№2181153, D03C 13/00, 7/00 Ткацкий станок/ Карева Т.Ю., Николаев С.Д., Ерохин Ю.Ф.-10.04.2002.
5. Патент Р.Ф. №2806965, D03C 7/00, 13/00 Зевообразовательный механизм для формирования трехосной ткани/Карева Т.Ю., Кожевникова Л.В., Кожевников С.О., Карев Ф.М., Кожевников Ю.С., Кожевникова Н.С., Щекотов С.В. - 08.11.2023, Бюл. №31.
6. Патент US 4 046 173, D03C 13/00 Triaxial weaving machine with heddle shedding means/ KAROL KULCZYCKI, PARSIPPANY,N.J.; - 06.09.1977.
7. Патент на полезную модель RU 191 225 D03C 13/00,D03D 13/00. Зевообразовательный механизм для формированиятрехосной ткани / ЧУБАРОВ ВЯЧЕСЛАВ ГЕРАСИМОВИЧ, БЕЛОГЛАЗОВ АЛЕКСАНДР ПАВЛОВИЧ, БЕЛОВ ОЛЕГ АЛЕКСАНДРОВИЧ, ДЕНИСОВ ЮРИЙ АНАТОЛЬЕВИЧ - 30.07.2019.
8. Патент на полезную модель RU 183 118 D03D 13/00. Зевообразовательный механизм для формированиятрехосной ткани / ЧУБАРОВА АННА ВЯЧЕСЛАВОВНА, ШИРЯЕВ НАКОЛАЙ АЛЕКСАНДРОВИЧ, ШИРЯЕВ АЛЕКСАНДР НИКОЛАЕВИЧ - 11.09.2018.
9. Патент Р.Ф. №2114224, D03C 7/00. Зевообразовательный механизм ткацкого станка/ ЕРОХИН Ю.Ф., КАРЕВА Т.Ю. - 27.06.1998.
10. Патент Р.Ф. №20965543, D03D19/00, 23/00Способ получения ткани на ткацком станке/ ЕРОХИН Ю.Ф., ЕРОХИНА Т.Ю. - 20.11.1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕВООБРАЗОВАТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ФОРМИРОВАНИЯ ТРЕХОСНОЙ ТКАНИ | 2023 |
|
RU2806965C1 |
| ТКАЦКИЙ СТАНОК | 2000 |
|
RU2181153C1 |
| МЕХАНИЗМ ПРИБОЯ УТОЧНОЙ НИТИ НА ТКАЦКОМ СТАНКЕ | 1996 |
|
RU2111299C1 |
| ЗЕВООБРАЗОВАТЕЛЬНЫЙ МЕХАНИЗМ ТКАЦКОГО СТАНКА | 1995 |
|
RU2114224C1 |
| СПОСОБ ТКАЧЕСТВА И ВЕРТИКАЛЬНАЯ ТКАЦКАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2726078C1 |
| Механизм регулирования натяжения основных нитей на ткацком станке | 1977 |
|
SU737518A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТКАНИ | 2015 |
|
RU2588430C1 |
| БЕСЧЕЛНОЧНЫЙ ЛЕНТОТКАЦКИЙ СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ УЗКИХ ТКАНЫХ ИЗДЕЛИЙ, А ТАКЖЕ УЗКОЕ ТКАНОЕ ИЗДЕЛИЕ | 2001 |
|
RU2239009C2 |
| ТКАНЕФОРМИРУЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2426826C1 |
| Перевивочное устройство ткацкого станка для выработки лент с основным ворсом | 1976 |
|
SU675103A1 |
Заявлен ткацкий станок для выработки трехосных тканей, в котором зевообразовательный механизм выполнен с возможностью вертикального и горизонтального перемещения нитей основы двух систем в разные стороны, при этом зевообразовательный механизм для горизонтального перемещения выполнен в виде контактирующих пар ременных передач с полуотверстиями, которые в зоне контакта пары ремней образуют отверстия, при этом зевообразовательный механизм снабжен поворотными устройствами для перемещения стержней по замкнутому контуру, а бердо выполнено в виде червяка с профилированными гранями в виде зубьев открытого берда, жестко закрепленного на батане с возможностью вращательного и качательного движения, при этом механизм подачи нитей основы обеспечивает сматывание нитей основы с секционных валиков, которые жестко закреплены на колесе (3), расположенном на валу (1), и имеют возможность вращательного движения от электродвигателя, причем колесо (3) имеет зубчатый венец (5), а механизм подачи нитей основы оснащен системой компенсации длины каждой основной нити, что определяет равное натяжение всех нитей основы независимо от их местоположения по ширине ткацкого станка, и нитенаправитель для создания зоны параллельного расположения нитей основы от нитенаправителя до стержней с глазками для нитей основы зевообразовательного механизма, что определяет точное расположение систем нитей по ширине ткацкого станка в зоне зевообразования и предотвращает возможную обрывность нитей, системы нитей основы по ходу с секционных валиков имеют зону, в которой все нити основы расположены радиально относительно нитенаправителя, зону, в которой все нити основы расположены параллельно между собой и зону, в которой перекрещенные нити основы переплетаются между собой и с системой нитей утка. 6 ил.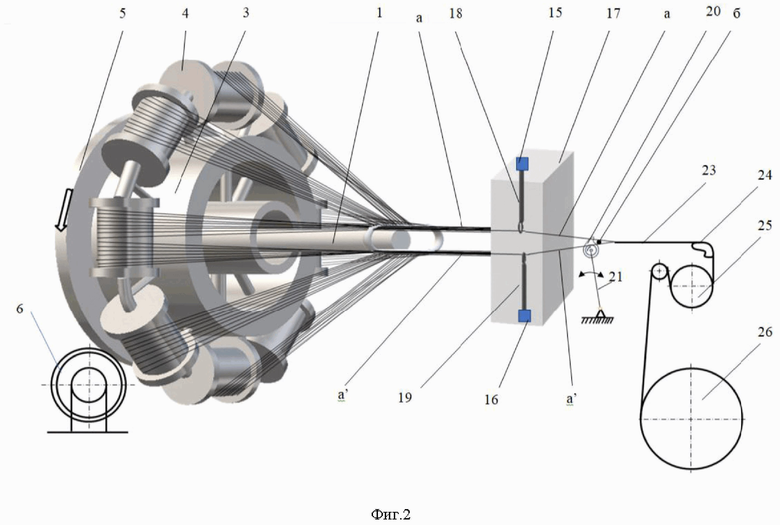
Ткацкий станок, содержащий ремизный зевообразовательный механизм с элементами для заправки систем нитей основы, которые выполнены в виде стержней с глазками и установлены на одинаковом расстоянии друг от друга, батанный механизм, содержащий бердо, которое выполнено с возможностью перехода нитей основы одной из систем из одного зуба в другой в противоположном направлении нитям основы другой системы, и механизм подачи нитей основы в зону формирования, содержащий систему компенсации длины подаваемой нити основы, отличающийся тем, что зевообразовательный механизм выполнен с возможностью вертикального и горизонтального перемещение нитей основы двух систем в разные стороны, при этом зевообразовательный механизм для горизонтального перемещения выполнен в виде контактирующих пар ременных передач с полуотверстиями, которые в зоне контакта пары ремней образуют отверстия для возможного горизонтального перемещения стержней с глазками за пяты, при этом зевообразовательный механизм снабжен поворотными устройствами для перемещения стержней по замкнутому контуру, а бердо выполнено в виде червяка с профилированными гранями в виде зубьев открытого берда, с шагом граней витков, равным 200/Ро, где Ро - плотность расположения нитей основы в ткани, нит./дм, жестко закрепленного на батане с возможностью вращательного и качательного движения, причем вращение червяка синхронизировано с перемещением отверстий нижней контактирующей ременной передачи зевообразовательного механизма, при этом механизм подачи нитей основы обеспечивает сматывание нитей основы с секционных валиков, которые жестко закреплены на колесе (3), расположенном на валу (1), и имеют возможность вращательного движения от электродвигателя для подачи нитей основы в зону формирования систем нитей основы, причем колесо (3) имеет зубчатый венец (5) для возможности вращения колеса против часовой стрелки от электродвигателя (6) с возможностью перемещения систем нитей основы по замкнутому контуру, при этом вращение колеса синхронизировано с перемещением контактирующих пар ременных передач зевообразовательного механизма, а механизм подачи нитей основы оснащен системой компенсации длины каждой основной нити, что определяет равное натяжение всех нитей основы независимо от их местоположения по ширине ткацкого станка, и нитенаправитель для создания зоны параллельного расположения нитей основы от нитенаправителя до стержней с глазками для нитей основы зевообразовательного механизма, что определяет точное расположение систем нитей по ширине ткацкого станка в зоне зевообразования и предотвращает возможную обрывность нитей, системы нитей основы по ходу с секционных валиков имеют зону, в которой все нити основы расположены радиально относительно нитенаправителя, зону, в которой все нити основы расположены параллельно между собой, и зону, в которой перекрещенные нити основы переплетаются между собой и с системой нитей утка.
| АВТОМАТ ДЛЯ ДОЗИРОВКИ РЫБЫ В ТАРУ | 0 |
|
SU183118A1 |
| СПОСОБ ТКАЧЕСТВА И ВЕРТИКАЛЬНАЯ ТКАЦКАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2726078C1 |
| RU 217173 U1, 21.03.2023 | |||
| ТКАЦКИЙ СТАНОК | 2000 |
|
RU2181153C1 |
| WO 2017009015 A1, 08.09.1976 | |||
| EP 3875649 B1, 26.10.2022 | |||
| Батанный механизм ткацкого станка для выработки тканей в два яруса | 1986 |
|
SU1423647A1 |

