Перекрестные ссылки на связанные заявки
[0001] Настоящая патентная заявка представляет собой переведенную на национальную фазу в России международную заявку PCT/CN2022/077855, поданную 25.02.2022, которая притязает на приоритет на основе китайской заявки с номером 202110615607.0, поданной 2 июня 2021 года, под названием «Модуль линейного лазера и самоходное устройство», и все содержание упомянутых заявок включено в данный документ путем ссылки.
Область техники
[0002] Варианты реализации данного изобретения относятся к модулю линейного лазера и самоходному устройству.
Уровень техники
[0003] Робот-пылесос и другое самоходное устройство может в автоматическом режиме убирать грязь, подметать пол, очищать от пыли и проводить другие операции по уборке, поэтому оно широко применяется в разных сферах. В процессе уборки самоходное устройство может в режиме реального времени обнаруживать препятствия, которые могут встретиться на его пути, и обходить их. Но на текущий момент из-за низкой точности распознавания препятствий самоходному устройству бывает трудно обойти их с достаточной точностью.
[0004] Следует отметить, что информация, указанная в разделе «Уровень техники», используется только для улучшения понимания предпосылок изобретения и, следовательно, может включать информацию, которая не относится к предшествующему уровню техники, известному обычному специалисту в данной области техники.
Раскрытие сущности изобретения
[0005] В одном из аспектов изобретения представлен модуль линейного лазера,
включающий в себя:
основной корпус;
устройство для получения первого изображения, которое устанавливается на описанном выше корпусе, включая первую камеру, как минимум одну пару лазерных передатчиков и модуль для обработки первого изображения; упомянутая пара лазерных передатчиков устанавливается с обеих сторон первой камеры и предназначена для передачи линейной лазерной проекции вовне основного корпуса; вышеупомянутая первая камера предназначена для получения первого изображения окружающей среды, включая световой пучок линейного лазера; вышеупомянутый модуль для обработки первого изображения предназначен для получения информации о расстоянии до препятствия по первому изображению;
устройство для получения второго изображения, в том числе вторая камера и модуль для обработки второго изображения; вторая камера предназначена для получения второго изображения окружающей среды; модуль для обработки второго изображения предназначен для получения информации о расстоянии до препятствия по второму изображению окружающей среды.
[0006] В иллюстративном варианте реализации изобретения вышеупомянутый модуль обработки первого изображения использует метод триангуляции для расчета расстояния до препятствия по второму изображению.
[0007] В иллюстративном варианте реализации изобретения модуль обработки второго изображения включает в себя:
модуль отбора признаков, который предназначен для сбора информации об особых признаках по второму изображению;
модуль распознавания, который вводит упомянутые сведения о признаках в ранее обученную модель распознавания препятствий, чтобы распознавать информацию о типах препятствий.
[0008] В иллюстративном варианте реализации изобретения модуль обработки второго изображения включает в себя:
учебный модуль, который создает модель распознавания препятствий для использования полученных учебных данных.
[0009] В иллюстративном варианте реализации изобретения вышеупомянутый лазерный передатчик излучает инфракрасный свет, первая камера представляет собой инфракрасную камеру; вторая камера представляет собой камеру RGB.
[00010] В иллюстративном варианте реализации изобретения вышеупомянутое устройство для получения первого изображения также включает в себя:
первую линзу со светофильтром, которая устанавливается на стороне камеры, удаленной от корпуса, и предназначенная для того, чтобы в упомянутую первую камеру попадал только ИК-свет;
упомянутое устройство для получения второго изображения включает в себя:
вторую линзу со светофильтром, которая устанавливается на стороне камеры, удаленной от корпуса, и предназначенная для того, чтобы в упомянутую вторую камеру попадал только видимый свет.
[00011] В иллюстративном варианте реализации изобретения вышеупомянутый корпус имеет первый конец и второй конец, а также соединительную часть, которая соединяет эти оба конца;
упомянутая пара лазерных передатчиков устанавливается на упомянутых первом и втором концах, а упомянутые первая и вторая камеры устанавливаются на упомянутой соединительной части.
[00012] В иллюстративном варианте реализации изобретения вышеупомянутый модуль линейного лазера также включает в себя:
устройство позиционирования для возврата к зарядной станции, которое устанавливается на упомянутом корпусе и используется для соединения и связи с зарядной станцией.
[00013] В иллюстративном варианте реализации изобретения упомянутое устройство позиционирования для возврата к зарядной станции включает в себя: инфракрасный передатчик и как минимум два инфракрасных приемника; упомянутый ИК-передатчик посылает инфракрасный сигнал на зарядную станцию, а упомянутые ИК-приемники используются для приема инфракрасного сигнала от зарядной станции.
[00014] В иллюстративном варианте реализации изобретения упомянутые устройства для получения первого и второго изображений соединяются с блоком главного управления, который отправляет им команды.
[00015] В иллюстративном варианте реализации изобретения вышеупомянутый лазерный передатчик включает в себя:
линейный лазерный генератор, который создает линейное лазерное излучение;
мостовую схему лазера, которая соединяется с блоком главного управления для управления линейным лазерным генератором на основе команд, передаваемых упомянутым блоком главного управления.
[00016] В иллюстративном варианте реализации изобретения вышеупомянутая мостовая схема лазера включает в себя:
первую схему усилителя, которая применяется для приема сигнала управления от упомянутого блока главного управления, а также для усиления сигнала управления и его передачи упомянутому линейному лазерному генератору для его включения и выключения;
вторую схему усилителя, которая применяется для приема сигнала регулирования от упомянутого блока главного управления, а также для усиления упомянутого сигнала регулирования и его передачи упомянутому линейному лазерному генератору для контроля мощности генерируемого лазерного излучения.
[00017] В иллюстративном варианте реализации изобретения оптическая ось упомянутой первой камеры пересекается с горизонтом по направлению вниз, а оптическая ось упомянутой второй камеры пересекается с горизонтом по направлению вверх.
[00018] В иллюстративном варианте реализации изобретения заключенный угол между оптической осью упомянутой первой камеры и горизонтом равен 7 градусам, а заключенный угол между оптической осью упомянутой второй камеры и горизонтом равен 5 градусам.
[00019] В одном аспекте настоящего изобретения представлено самоходное устройство, включающее в себя: корпус устройства;
модуль линейного лазера, описанный в любом из пунктов выше, расположенный на основном корпусе устройства;
модуль управления устройством, который управляет движением самоходного устройства в соответствии с полученными сведениями о расстоянии до препятствий и типах препятствий.
[00020] В иллюстративном варианте реализации изобретения упомянутое самоходное устройство включает в себя:
буферный элемент, который устанавливается на удаленных от основного корпуса сторонах упомянутых устройств для получения первого и второго изображений, данный узел имеет отверстия, расположенные напротив упомянутых устройств для получения первого и второго изображений; и
упомянутый буферный элемент снабжен лампой подсветки, расположенной снаружи от упомянутых отверстий.
[00021] Следует понимать, что приведенное выше общее описание и
последующее подробное описание предназначены лишь для иллюстрации и пояснений и не могут ограничивать данное изобретение.
Описание прилагаемых чертежей
[00022] Приведенные здесь чертежи включены в описание и является его частью, они показывают варианты реализации, соответствующие данному изобретению, и вместе с описанием предназначены для интерпретации принципа работы данного изобретения. Очевидно, что чертежи, представленные ниже, показывают лишь некоторые из вариантов реализации настоящего изобретения; специалисты в данной области техники могут на их основе получить другие чертежи, не прилагая усилий по изобретению.
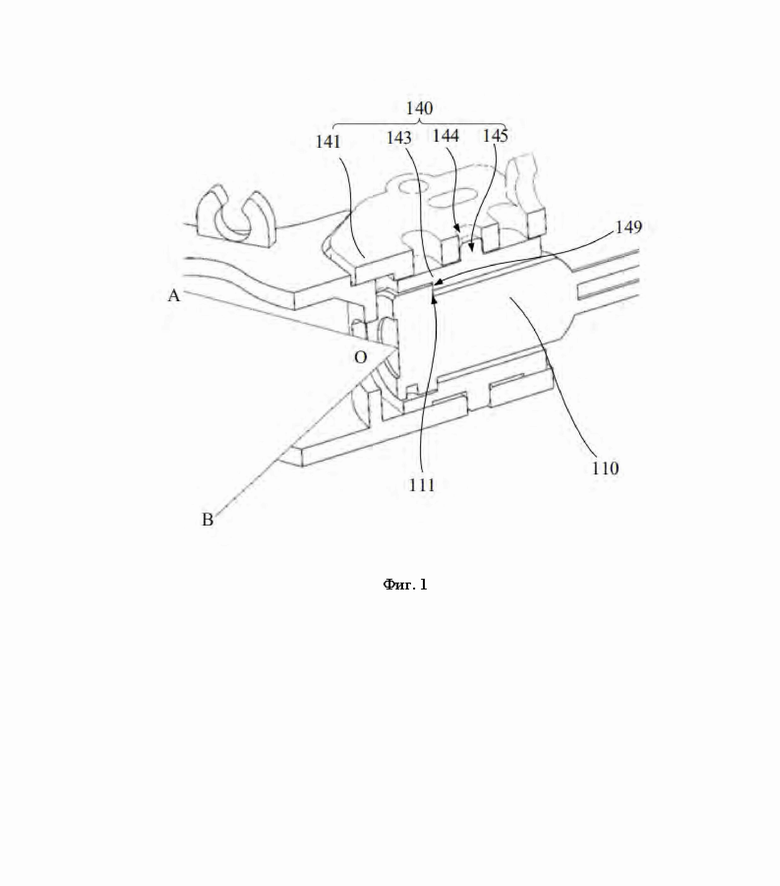
[00023] На фиг. 1 изображен конструктивный чертеж части модуля линейного лазера согласно одному из примеров реализации изобретения;
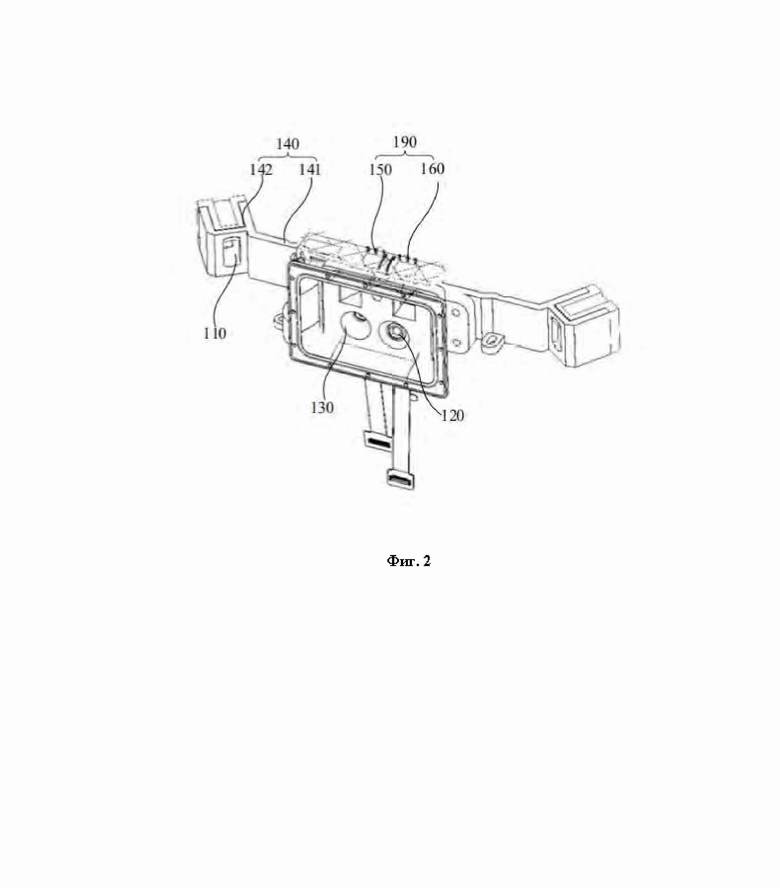
[00024] На фиг. 2 изображен конструктивный чертеж модуля линейного лазера согласно другому варианту реализации изобретения;
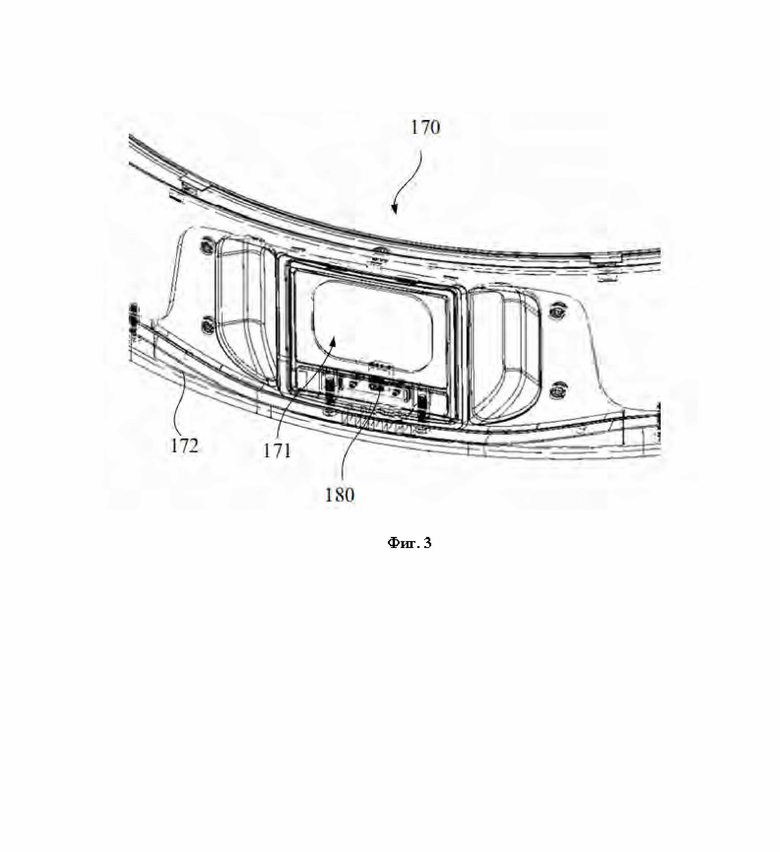
[00025] На фиг. 3 изображен конструктивный чертеж буферного элемента согласно одному из вариантов реализации;
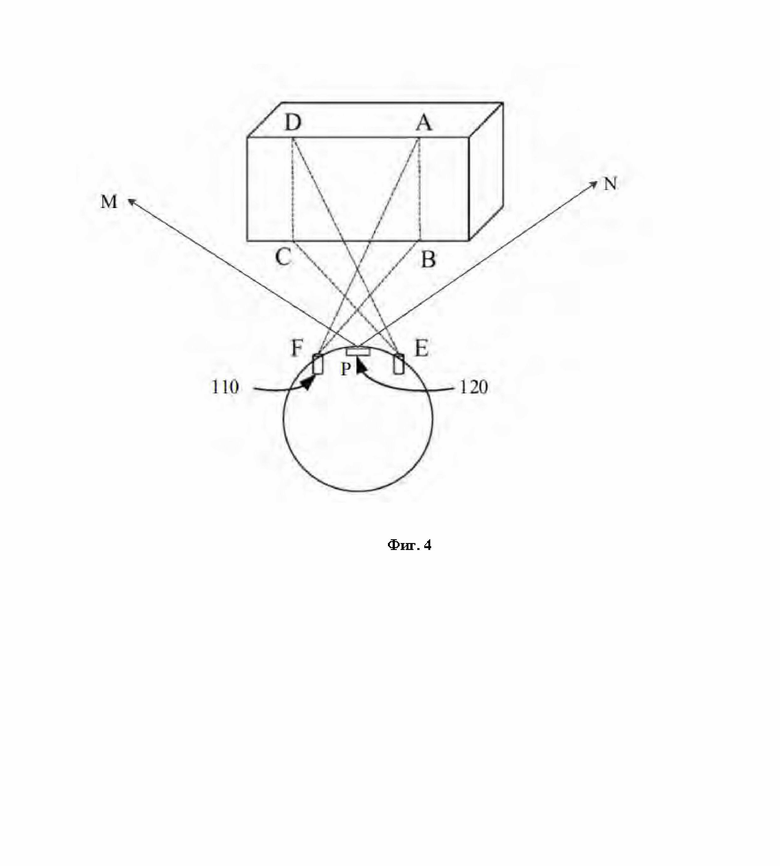
[00026] На фиг. 4 показана принципиальная схема линейного лазерного генератора согласно одному из вариантов реализации;
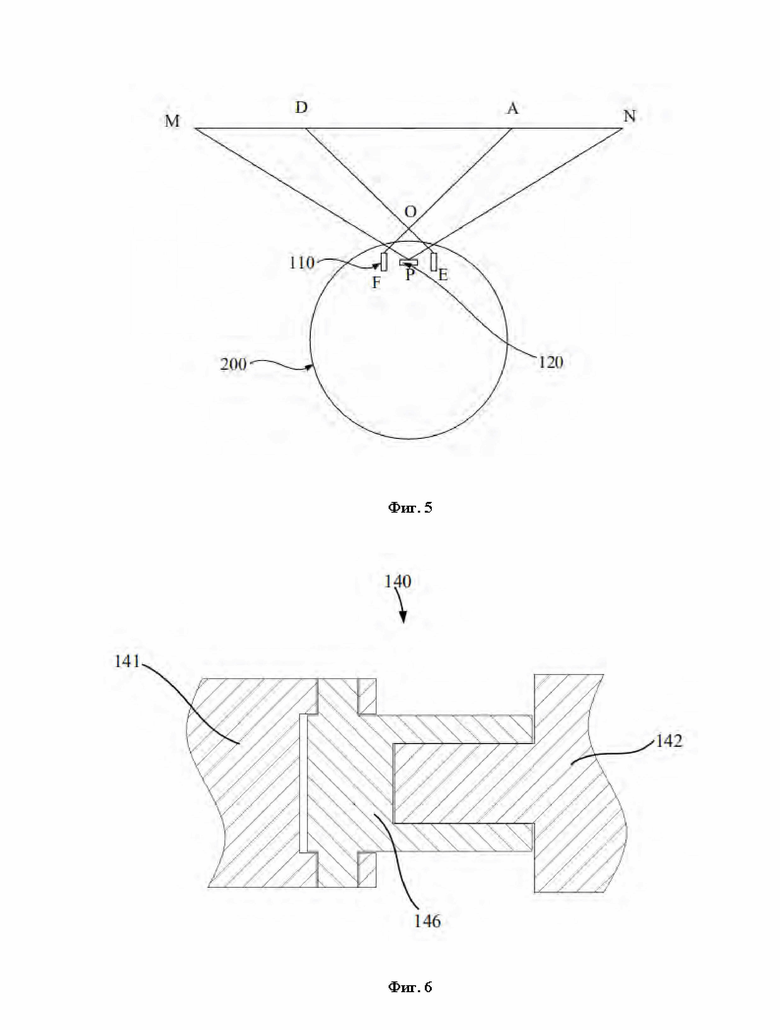
[00027] На фиг. 5 показана схема соответствия линейного лазерного генератора и угла обзора первой камеры согласно одному из вариантов реализации;
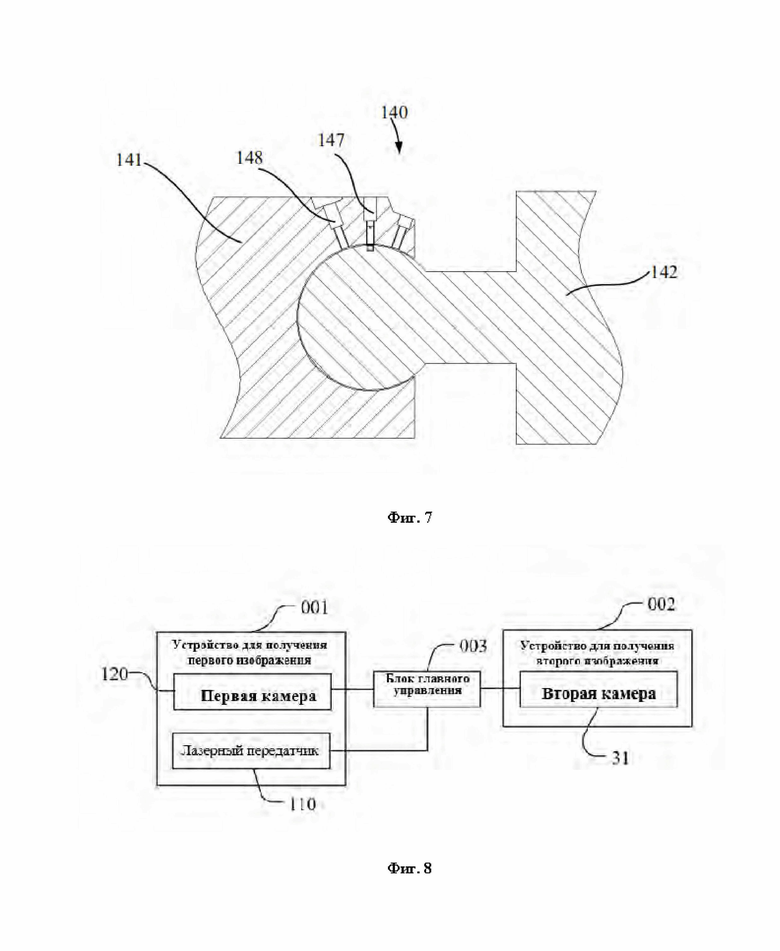
[00028] На фиг. 6 изображен конструктивный чертеж части основного корпуса согласно одному из вариантов реализации;
[00029] На фиг. 7 изображен конструктивный чертеж части основного корпуса согласно другому варианту реализации;
[00030] На фиг. 8 изображена блок-схема модуля линейного лазера согласно одному из вариантов реализации данного изобретения;
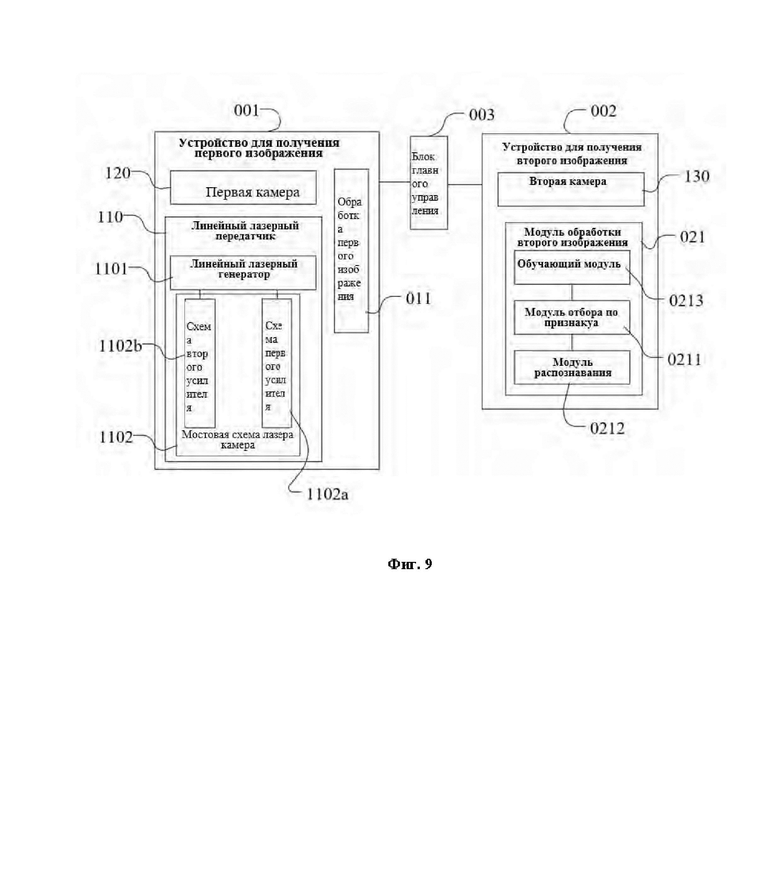
[00031] На фиг. 9 изображена блок-схема модуля линейного лазера согласно другому варианту реализации данного изобретения.
Конкретные варианты реализации
[00032] Дальше варианты реализации будут описаны более подробно со ссылкой на прилагаемые чертежи. Тем не менее, описанные здесь варианты реализации могут иметь различное исполнение и не ограничивают данное изобретение; напротив, эти варианты реализации делают настоящее изобретение всеобъемлющим и завершенным, доводя идею вариантов реализации до сведения специалистов в данной области техники. Одни и те же обозначения на чертежах указывают на одни и те же или похожие детали, поэтому повторяющиеся их описания будут опущены. Кроме того, чертежи являются лишь схематическими иллюстрациями настоящего изобретения и не обязательно выполнены в масштабе.
[00033] Слова «один», «один из», «данный», «упомянутый», «как минимум один» используются для обозначения одного или нескольких факторов/составных частей/другого; слова «включая» и «имеет» используются для обозначения открытого включения и относятся к элементам/составным частям/другому, перечисленным в дополнение к имеющимся факторам/составным частям/другому; слова «первый», «второй» и другие используются для обозначения, а не для ограничения количества объектов.
[00034] По меньшей мере один вариант реализации настоящего изобретения представляет модуль линейного лазера, который применяется в самоходном устройстве. По меньшей мере один вариант реализации настоящего изобретения представляет один из видов самоходного устройства, которое включает модуль линейного лазера. В одном из вариантов реализации данного изобретения упомянутое самоходное устройство представляет собой интеллектуальное уборочное устройство, например, робот-пылесос, робот-полотер, робот-полировщик пола или робот-газонокосильщик. Из соображений удобства изложения техническое решение вариантов реализации данного изобретения будет описываться на примере робота-пылесоса.
[00035] Как показано на фиг. 1-5, самоходное устройство в одном из вариантов реализации данного изобретения может включать в себя корпус 200 устройства, сенсорную систему, модуль управления устройством, приводную систему, уборочную систему, энергетическую систему и систему человеко-машинного взаимодействия и др. Все системы скоординированы и взаимодействуют друг с другом, так что самоходное устройство способно самостоятельно перемещаться и выполнять функции уборки. Упомянутые системы самоходного устройства встроены в корпус 200 устройства.
[00036] Корпус 200 устройства может иметь форму, приближенную к круглой (округлая спереди и сзади) или другие формы, включая, без ограничений, D-образную форму, округлую спереди или сзади. Сенсорная система включает в себя модуль линейного лазера, расположенный над основным корпусом 200 устройства или сбоку от него. Модуль управления устройством соединяется с модулем линейного лазера и выполняет функциональное управление самоходным устройством на основе результатов распознавания модулем линейного лазера.
[00037] В варианте реализации данного изобретения не ограничивается конкретное местоположение модуля линейного лазера в корпусе 200 устройства. Например, это может быть, помимо прочего, передняя, задняя, левая, правая стороны, верхняя, центральная, нижняя и другие части корпуса 200. Более того, модуль линейного лазера устанавливается в центральной, верхней и нижней частях корпуса 200 устройства по вертикали.
[00038] В примере реализации данного изобретения самоходное устройство выполняет свои функции, двигаясь вперед; чтобы лучше распознавать условия окружающей среды впереди, модуль линейного лазера устанавливается спереди корпуса 200 устройства; передняя сторона - это сторона, обращенная к основному корпусу 200 устройства во время движения самоходного устройства вперед.
[00039] В варианте реализации данного изобретения самоходное устройство также может включать зарядную станцию, которая легко соединяется с корпусом 200 устройства или отсоединяется от него. Например, когда корпус 200 устройства нужно зарядить, он стыкуется с зарядной станцией и заряжается. Когда корпус 200 устройства выполняет работу по уборке, он отсоединяется от зарядной станции и выполняет уборку. Зарядная станция включает в себя инфракрасный передатчик, который предназначен для передачи инфракрасных сигналов, таких как инфракрасные сигналы в ближнем диапазоне. Модуль линейного лазера также включает в себя устройство позиционирования 190 для возврата на зарядную станцию, поддерживающее связь с зарядной станцией. Понятно, что устройство позиционирования 190 для возврата на зарядную станцию установлено в основном корпусе 140 и предназначено для приема инфракрасных сигналов от зарядной станции.
[00040] В варианте реализации настоящего открытия модуль линейного лазера включает в себя устройство позиционирования для возврата на зарядную станцию 190, когда корпус 200 устройства, в котором установлен модуль линейного лазера, должен вернуться на зарядку, упомянутый модуль управления устройством контролирует устройство позиционирования 190, чтобы оно искало инфракрасный сигнал вблизи зарядной станции, и когда устройство позиционирования 190 принимает инфракрасный сигнал, модуль управления подает команду корпусу 200 устройства на стыковку с зарядной станцией. Кроме того, устройство позиционирования 190 также включает в себя инфракрасный передатчик 150, предназначенный для передачи инфракрасных сигналов. Когда корпус 200 устройства успешно состыковался с зарядной станцией, модуль управления устройством управляет инфракрасным передатчиком 150, чтобы тот передавал инфракрасный сигнал на зарядную станцию для зарядки корпуса 200 устройства.
[00041] Например, устройство позиционирования 190 включает в себя ИК-приемник 160 и ИК-передатчик 150, при этом ИК-приемник 160 предназначен для приема инфракрасного сигнала, а ИК-передатчик 150 для передачи ИК-сигнала. В некоторых из вариантов реализации инфракрасный приемник 160, инфракрасный передатчик 150, первая камера 120, вторая камера 130, линейный лазерный передатчик 110 устанавливаются на основном корпусе 140, реализуя модульную конструкцию сенсорной системы, удобную для сборки и обслуживания.
[00042] Кроме того, ИК-приемник 160 устройства позиционирования 190 включает как минимум два инфракрасных датчика, которые расположены с равным интервалом в поперечном направлении в верхней части корпуса устройства. Такая установка обеспечивает надежность инфракрасного сигнала, принимаемого ИК-приемником 160, а также надежность связи между корпусом 200 устройства и зарядной станцией. В некоторых вариантах реализации ИК-приемник может включать любое количество ИК-датчиков. ИК-передатчик 150 устройства позиционирования 190 включает как минимум один ИК-индикатор. Понятно, что ИК-приемник 160 и ИК-передатчик 150 также могут быть расположены в других местах, которые отвечают требованиям. В данном изобретении в этом нет ограничений.
[00043] В некоторых вариантах реализации настоящего изобретения модуль управления устройством предназначен для управления перемещением самоходного устройства на основе информации о расстоянии до препятствия и информации о типе препятствия. Под информацией о расстоянии до препятствия понимается расстояние от препятствия до самоходного устройства. Модуль управления устройством может соединяться напрямую с блоком главного управления 003 и получать информацию о расстоянии до препятствия и информацию о типе препятствия после обработки первого изображения окружающей среды и второго изображения окружающей среды блоком главного управления 003, или модуль управления устройством может соединяться с блоком главного управления 003 через запоминающее устройство, в котором может сохраняться информация о расстоянии до препятствия и информация о типе препятствия, полученные от блока главного управления 003, и модуль управления устройством может напрямую обращаться к информации о расстоянии до препятствия и информации о типе препятствия, хранящейся в запоминающем устройстве.
[00044] В некоторых вариантах реализации настоящего изобретения модуль управления устройством и блок главного управления 003 могут представлять собой две независимые схемы. Например, модуль управления устройством и блок главного управления 003 могут быть двумя отдельными микросхемами. В некоторых вариантах реализации модуль управления устройством и блок главного управления 003 могут интегрироваться в одну схему. Например, модуль управления устройством и блок главного управления 003 могут интегрироваться в одну микросхему. Тип микросхемы здесь специально не ограничен при условии, что микросхема выполняет свои функции.
[00045] В некоторых вариантах реализации данного изобретения корпус 200 устройства также может быть снабжен таким механизмом перемещения, как ролик, гусеница и пр., механизм перемещения контролируется модулем управления устройством и обеспечивает передвижение самоходного устройства.
[00046] В некоторых вариантах реализации данного изобретения, как показано на фиг. 3, самоходное устройство также включает буферный элемент 170, который устанавливается спереди корпуса 200 устройства, а модуль линейного лазера устанавливается между буферным элементом 170 и корпусом 200 устройства, то есть первая камера 120, вторая камера 130, линейный лазерный передатчик 110, устройство позиционирования 190 устанавливаются между буферным элементом 170 и корпусом 200 устройства, чтобы буферный элемент 170 мог обеспечивать защиту первой камеры 120, второй камеры 130, линейного лазерного передатчика 110, устройства позиционирования 190, таким образом буферный элемент 170 защищает первую камеру 120, вторую камеру 130, линейный лазерный передатчик 110 и устройство позиционирования 190 от повреждений под внешним воздействием, продлевая срок службы первой камеры 120, второй камеры 130, линейного лазерного передатчика 110, устройства позиционирования 190. Окно 171, сделанное напротив мест установки буферного элемента 170, первой камеры 120 и второй камеры 130, впускает свет снаружи в первую камеру 120 и вторую камеру 130, а окно напротив места установки буферного элемента 170 и линейного лазерного передатчика 110, пропускает световой пучок линейного лазерного передатчика 110 из буферного элемента 170 наружу, окно напротив места установки буферного элемента 170 и устройства позиционирования 190 позволяет устройству позиционирования 190 принимать и передавать ИК-сигнал, тем самым обеспечивая надежность работы модуля линейного лазера.
[00047] Понятно, что буферный элемент 170 может быть эквивалентен противоударной пластине основного корпуса 200 устройства. При установке модуля линейного лазера на основной корпус сначала устанавливается основной корпус 140, оснащенный первой камерой 120, второй камерой 130 и линейным лазерным передатчиком 110, а затем буферный элемент 170 (такой как противоударная пластина) соединяют с основным корпусом 140 или с основным корпусом 200 устройства.
[00048] В некоторых вариантах реализации настоящего изобретения буферный элемент 170 включает в себя противоударную пластину 172 и эластичный элемент, противоударная пластина 172 и основной корпус 140 соединены эластичным элементом, модуль линейного лазера расположен на внутренней стороне противоударной пластины 172, при установке эластичного элемента, когда буферный элемент 170 сталкивается с препятствием, эластичный элемент уменьшает силу воздействия противоударной пластины 172 на основной корпус 200 устройства, модуль линейного лазера, играя определенную буферную роль, дополнительно уменьшает повреждение основного корпуса устройства и модуля линейного лазера. После установки резиновой прокладки снаружи противоударной пластины 172, когда буферный элемент 170 сталкивается с препятствием, резиновая прокладка непосредственно контактирует с препятствием, играя защитную роль, также резиновая прокладка является дополнительным эластичным элементом, который в дальнейшем может играть амортизирующую роль. Другими словами, в настоящем изобретении используются эластичные элементы и резиновая прокладка для придания буферному элементу 170 двухслойного амортизирующего эффекта, что значительно снижает возможность повреждения основного корпуса 200 устройства и модуля линейного лазера препятствиями и повышает надежность самоходного устройства. В частности, эластичные элементы представляют собой эластичные стойки и/или пружины, а также могут быть другими эластичными элементами, которые отвечают требованиям.
[00049] В некоторых вариантах реализации данного изобретения самоходное устройство также включает в себя лампу подсветки 180 и датчик внешнего освещения. Датчик внешнего освещения предназначен для определения яркости окружающего освещения. Лампа подсветки 180 расположена на буферном элементе 170 и близко к окну 171, и когда света недостаточно для получения второй камерой 130 четкого и точного изображения окружающей среды, то есть когда имеющееся окружающее освещение не соответствует требованиям экспозиции второй камеры 130, лампа подсветки 180 используется для получения дополнительного света, необходимого для нормальной работы второй камеры 130, обеспечивая для второй камеры 130 возможность четко и точно захватывать изображения окружающей среды и повышая точность распознавания препятствий.
[00050] Как показано на фиг. 8, модуль линейного лазера содержит основной корпус 140 и устройство для получения первого изображения 001, причем устройство для получения первого изображения 001 включает в себя первую камеру 120, расположенную в основном корпусе 140, по меньшей мере один лазерный передатчик 110 и модуль обработки 011 первого изображения, по меньшей мере один линейный лазерный передатчик 110 расположен вблизи первой камеры 120, предназначен для передачи линейной лазерной проекции, первая камера 120 и по меньшей мере один линейный лазерный передатчик 110 работают во взаимодействии друг с другом и предназначены для получения первого изображения окружающей среды; модуль обработки первого изображения 011 предназначен для получения информации о расстоянии до препятствия на основе первого изображения окружающей среды; расстояние до препятствия представляет собой расстояние от первой камеры до препятствия при получении первого изображения окружающей среды; по меньшей мере один линейный лазерный передатчик 110 подвижно соединен с корпусом 140, и/или корпус 140 является подвижной конструкцией, которая позволяет регулировать азимут и угол поворота линейного лазерного передатчика 110.
[00051] Модуль линейного лазера, предусмотренный вариантом реализации изобретения, первая камера 120 и по меньшей мере один лазерный передатчик 110 взаимодействуют друг с другом, идентифицируя препятствия или местность перед корпусом 200 устройства для соответствующих действий по обходу препятствий или выполнения уборки. Благодаря подвижному соединению между линейным лазерным передатчиком и корпусом 140 можно регулировать положение линейного лазерного передатчика относительно корпуса 140, а также регулировать азимут и угол поворота линейного лазерного передатчика. Корпус 140 является подвижной конструкцией, в которой путем регулировки положения различных компонентов корпуса 140 относительно друг друга можно регулировать азимут и угол поворота линейного лазерного передатчика. Таким образом, когда линейный лазерный передатчик 110 установлен на корпусе 140, можно удобно регулировать угол и диапазон излучения линейного лазерного передатчика 110, чтобы быстро и удобно расположить линейный лазерный передатчик 110 перпендикулярно горизонтальной плоскости, и чтобы линейный лазер находился в поле зрения первой камеры 120. Такая конструкция упрощает и повышает эффективность сборки.
[00052] Кроме того, путем правильной регулировки азимута по меньшей мере одного линейного лазерного передатчика 110 линейный лазер можно расположить в пределах поля зрения первой камеры 120, чтобы первая камера 120 могла точно и со всех сторон фиксировать отраженный свет, испускаемый линейным лазерным передатчиком и отраженный препятствием, улучшая точность и охват первой камеры 120 при получении изображений окружающей среды. Понятно, что путем регулировки азимута по меньшей мере одного линейного лазерного передатчика 110, расположенного вблизи первой камеры 120, линейный лазерный передатчик можно зафиксировать в одной точке. При правильной регулировке угла поворота линейного лазерного передатчика линейный лазер располагается перпендикулярно горизонтальной плоскости, что повышает диапазон измерения расстояния.
[00053] По меньшей мере один линейный лазерный передатчик 110 имеет подвижное соединение с корпусом 140, так что путем регулировки положения линейного лазерного передатчика 110 относительно корпуса 140 можно регулировать азимут и угол поворота линейного лазерного передатчика 110. Корпус 140 является подвижной конструкцией, так что путем регулировки положения различных компонентов корпуса 140 относительно друг друга можно регулировать азимут и угол поворота по меньшей мере одного линейного лазерного передатчика 110. По меньшей мере один линейный лазерный передатчик 110 подвижно соединен с корпусом 140, который является подвижной конструкцией, и путем регулировки положения различных компонентов корпуса 140 относительно друг друга можно регулировать азимут и угол поворота по меньшей мере одного линейного лазерного передатчика 110. В данном варианте реализации регулировать азимут и угол поворота по меньшей мере одного линейного лазерного передатчика 110 можно разными способами в соответствии с разной конструкцией корпуса 140 и разными способами соединения по меньшей мере одного линейного лазерного передатчика 110 и корпуса 140.
[00054] Кроме того, по меньшей мере один линейный лазерный передатчик 110 предназначен для излучения линейной лазерной проекции, например, по меньшей мере один линейный лазерный передатчик может излучать вовне лазерную плоскость, и когда плоскость достигает препятствия, на его поверхности формируется световой пучок лазера, который используется для получения изображения окружающей среды. Плоскость АОВ, показанная на фиг. 1, характеризует лазерную плоскость, излучаемую линейным лазерным передатчиком 110, которая представляет собой вертикальную плоскость. Плоскость ABF и плоскость CDE, показанные на фиг. 4, характеризуют лазерную плоскость, излучаемую первым линейным лазерным передатчиком 110 и вторым линейным лазерным передатчиком 111, где линейный сегмент АВ и линейный сегмент CD характеризуют линейный лазер. В некоторых вариантах реализации настоящего изобретения линейным лазерным передатчиком может быть лазерная трубка. Понятно, что линейным лазерным передатчиком также могут быть другие отвечающие требованиям конструкции. Здесь в настоящем изобретении нет ограничений. Понятно, что в направлении излучения (например, в направлении движения самоходного устройства) первого линейного лазерного передатчика 100 и второго линейного лазерного передатчика 110 устанавливается изогнутая линза. В некоторых вариантах реализации настоящего изобретения изогнутая линза может иметь вогнутую форму. Например, вогнутая линза может устанавливаться перед лазерной трубкой. Лазерная трубка излучает свет на определенной длине волны (например, инфракрасный свет). После прохождения через вогнутую линзу он становится рассеянным светом, который образует прямую линию в плоскости вертикального оптического пути.
[00055] Как показано на фиг. 4 и фиг. 5, модуль линейного лазера включает в себя два линейных лазерных передатчика 110, которые расположены по обе стороны от первой камеры 120, первая камера 120 и линейный лазерный передатчик работают во взаимодействии друг с другом. То есть два линейных лазерных передатчика 110 излучают световые пучки, перпендикулярные горизонтальной плоскости и расположенные в поле зрения первой камеры 120; первое изображение окружающей среды, полученное первой камерой 120, представляет собой световой пучок лазера, излучаемый двумя линейными лазерными передатчиками и отраженный препятствием. По первому изображению окружающей среды может быть получена информация о расстоянии до препятствия и измерено расстояние между препятствием и корпусом 200 устройства или между линейными лазерными модулями, чтобы самоходное устройство могло выполнить соответствующие действия по обходу препятствия.
[00056] В настоящем варианте реализации путем регулировки положения и угла установки двух линейных лазерных передатчиков 110 относительно корпуса 140 корпуса и/или путем регулировки положения различных компонентов корпуса 140 относительно друг друга можно регулировать угол поворота и азимут двух линейных лазерных передатчиков 110, при этом регулировка угла поворота двух линейных лазерных передатчиков 110 позволяет сделать так, чтобы линейный лазер был перпендикулярен горизонтальной плоскости, а регулировка азимута двух линейных лазерных передатчиков 110 позволяет регулировать угол между оптической осью первой камеры 120 и световыми пучками, излучаемыми двумя линейными лазерными передатчиками, чтобы линейный лазер находился в пределах поля зрения первой камеры 120. Затем регулируют азимут линейных лазерных передатчиков 110, расположенных по обе стороны от первой камеры 120, и определяют точку пересечения световых пучков линейных лазерных передатчиков 110 с обеих сторон в пределах поля зрения первой камеры 120, то есть выполняют фиксацию линейных лазеров с обеих сторон на одной точке, чтобы можно было измерить расстояние до препятствия перед корпусом 200 устройства.
[00057] В данном варианте реализации настоящего изобретения на фиг. 4 показана принципиальная схема работы линейного лазерного генератора, где буква Р обозначает первую камеру 120, а буквы Е и F обозначают линейный лазерный генератор 110, расположенный с обеих сторон (или на наружной стороне) первой камеры 120; прямые линии РМ и PN представляют две границы поля зрения первой камеры 120 по горизонтали, т.е. Z.MPN представляет угол поля зрения первой камеры 120 по горизонтали. Первый линейный лазерный передатчик 100 излучает вовне лазерную плоскость FAB, а второй линейный лазерный передатчик 110 излучает вовне лазерную плоскость ECD. После того, как лазерные плоскости FAB и ECD достигают препятствия, на поверхности препятствия формирует лазерный световой пучок, то есть отрезок линии АВ и отрезок линии CD, показанные на фиг. 4. Поскольку отрезки линии АВ и CD, излучаемые линейным лазерным генератором, расположены в поле зрения первой камеры, линейный лазер позволяет определить контур, высоту и/или ширину объекта в поле зрения первой камеры, и первая камера 120 может получать первое изображение окружающей среды, обнаруженное линейным лазером.
[00058] Кроме того, главный блок управления 003 предназначен для отправки рабочих команд устройству для получения первого изображения 001. Например, главный блок управления 003 может на основе первого изображения окружающей среды, полученного первой камерой 120, вычислять расстояние от модуля линейного лазера или основного корпуса 200 устройства, где расположен модуль линейного лазера линейного лазера, до препятствия впереди. Например, расстояние между модулем линейного лазера или основным корпусом 200 устройства и препятствием перед ним может быть вычислено с использованием метода триангуляции. В одном из вариантов реализации настоящего изобретения, как показано на фиг. 5, на фиг. 5 показан угол обзора в варианте реализации на фиг. 4, где буква Р обозначает первую камеру 120, буквы Е и F обозначают линейные лазерные передатчики 110, расположенные по обеим сторонам первой камеры 120; точка А обозначает проекцию линейного отрезка АВ в горизонтальной плоскости, точка D обозначает проекцию линейного отрезка CD в горизонтальной плоскости, Z.MPN обозначает угол обзора первой камеры 120 по горизонтали, точка О обозначает пересечение световых пучков линейных лазерных передатчиков 110 и оптической оси первой камеры 120. Принимая в качестве примера второй линейный лазерный генератор 110, расположенный в точке F, когда линейный лазерный передатчик и первая камера 120 зафиксированы и установлены на корпусе 140, известно фокусное расстояние первой камеры 120 и известен угол излучения линейного лазерного генератора F, то есть известен угол между прямой линией FA и оптической осью РО, и известна длина отрезка прямой ОР; известно расстояние между плоскостью изображения второго лазерного генератора 110 и первой камерой 120, по этим параметрам определяется, что изображение точки А на препятствии в первом изображении окружающей среды, полученном первой камерой 120, является А'. Поскольку точка А' будет смещена от оптической оси РО первой камеры 120, и это смещение известно, согласно принципу подобия треугольников и с учетом вышеупомянутых уже известных условий может быть измерено расстояние между А и F, то есть может быть получено расстояние между препятствием и линейным лазерным передатчиком 110. Понятно, что на основе характеристик деформации линейного отрезка лазера, отраженного препятствием и полученного первой камерой 120, также возможно определить местность впереди, чтобы самоходное устройство могло определить, какого рода операцию выполнять, обход препятствия или продолжение уборки.
[00059] В некоторых возможных вариантах реализации количество первых камер 120 не ограничено, например, головок первой камеры 120 может быть одна, две, три или другие числа, которые отвечают требованиям. Понятно, что в варианте реализации настоящего изобретения количество линейных лазерных передатчиков 110110 также не ограничено, например, линейных лазерных передатчиков 110 может быть два или более. Количество линейных лазерных передатчиков 110, установленных на каждой стороне первой камеры 120, также не ограничено. Количество линейных лазерных передатчиков 110 на каждой стороне первой камеры 120 может составлять один, два или более; кроме того, количество линейных лазерных передатчиков 110 на обеих сторонах первой камеры 120 может быть одинаковым или отличаться. Понятно, что когда на любой из сторон первой камеры 120 имеется несколько линейных лазерных передатчиков 110, они могут быть расположены слева направо или сверху вниз, здесь в этом нет ограничений.
[00060] Далее, в некоторых возможных вариантах реализации первая камера 120 позволяет не только измерять расстояние до препятствия перед основным корпусом 200 устройства, получать информацию о расстоянии до препятствия, но также идентифицировать тип препятствия и получать информацию о типе препятствия. Если временная последовательность отличается, для измерения расстояния до препятствий и идентификации типов препятствий используется первая камера 120. Например, главный блок управления 003 сначала на основе первого изображения окружающей среды, полученного первой камерой 120, определяет тип препятствия, а по типу препятствия определяет, нужно ли корпусу 200 устройства обходить препятствие, и если нужно, главный блок управления 003 определяет расстояние до препятствия на основе второго изображения окружающей среды, полученного первой камерой 120, для получения информации о расстоянии до препятствия для выполнения обхода препятствия; если же корпусу 200 устройства не нужно выполнять обход препятствия, самоходное устройство продолжает выполнять предыдущую операцию, что снижает вероятность ошибки при обходе препятствий самоходным устройством.
[00061] В некоторых вариантах реализации, как показано на фиг. 1, линейный лазерный передатчик 110 подвижно соединен с корпусом 140, и корпус 140 является подвижной конструкцией. В некоторых вариантах реализации настоящего изобретения корпус 140 включает в себя корпус 141 и соединительный элемент 143, первая камера 120 расположена в корпусе 141, линейный лазерный передатчик соединен с корпусом 141 через соединительный элемент 143, при этом соединительный элемент 143 снабжен сквозным отверстием, через которое линейный лазерный передатчик 110 проходит в соединительный элемент 143, линейный лазерный передатчик 110 имеет поворотное соединение с соединительным элементом 143, т.е. линейный лазерный передатчик 110 может вращаться в сквозном отверстии соединительного элемента 143, что позволяет регулировать угол поворота линейного лазерного передатчика 110 таким образом, чтобы линейный лазер был перпендикулярен горизонтальной плоскости для максимального увеличения диапазона измерения расстояния. Соединительный элемент 143 подвижно соединен с корпусом 141, например, соединительный элемент 143 может поворачиваться в плоскости относительно корпуса 141, то есть ось поворота соединительного элемента 143 относительно корпуса 141 представляет собой прямую линию в вертикальном направлении, так что соединительный элемент 143 приводит линейный лазерный передатчик 110 во вращение в горизонтальной плоскости относительно корпуса 141 и позволяет регулировать азимут линейного лазерного передатчика 110 так, чтобы световой пучок, излучаемый линейным лазерным передатчиком 110, располагался в поле зрения первой камеры 120.
[00062] Понятно, что поскольку линейный лазерный передатчик 110 может поворачиваться относительно соединительного элемента 143, а соединительный элемент 143 может поворачиваться относительно корпуса 141, в процессе сборки линейный лазерный передатчик 110 можно поворачивать в подходящее положение в сквозном отверстии соединительного элемента 143, то есть можно регулировать угол поворота линейного лазерного передатчика 110 и сам линейный лазерный передатчик 110. Поворачивая соединительный элемент 143 относительно корпуса 141 в подходящее положение, можно регулировать азимут линейного лазерного передатчика 110, то есть может быть осуществлена регулировка азимута линейного лазерного передатчика 110 и первой камеры 120, что очень легко и просто. Понятно, что после регулировки угла поворота и азимута линейного лазерного передатчика 110 соединительный элемент 143, корпус 141 и линейный лазерный передатчик 110 могут быть жестко соединены с помощью таких фиксирующих средств, например, с помощью связующих веществ, клея и т.д. можно закрепить концевую часть 142, корпус 141 и линейный лазерный передатчик 110, что очень легко и просто.
[00063] В одном варианте реализации настоящего изобретения корпус 141 снабжен установочной прорезью 144, соединительный элемент 143 снабжен выпуклой конструкцией 145, совпадающей с установочной прорезью 144, и поворачивается горизонтально в установочной прорези 144 через выпуклую конструкцию 145. Например, выпуклая конструкция 145 выпирает в вертикальном направлении, так что соединительный элемент 143 может поворачиваться в горизонтальном направлении относительно корпуса 141, т.е. ось вращения соединительного элемента 143 относительно корпуса 141 представляет собой прямую линию в вертикальном направлении, следовательно, выпуклая конструкция 145 соединительного элемента 143 вращается горизонтально в установочной прорези 144 корпуса 141 и может приводить в движение линейный лазерный передатчик 110 относительно корпуса 141 с выпуклой конструкцией 145 в качестве оси для горизонтального вращения, тем самым обеспечивая, чтобы излучение линейного лазерного передатчика 110 находилось в пределах угла обзора первой камеры 120, для осуществления отладки линейного лазерного генератора 110 и первой камеры 120, что обеспечивает простоту конструкции и удобство в эксплуатации. Понятно, что установочная прорезь 144 может иметь круглую форму, а выпуклая конструкция 145 может иметь форму круглого цилиндра; комбинация круглой установочной прорези и выпуклой конструкции круглой цилиндрической формы повышает подвижность и надежности вращения соединительного элемента 143 относительно корпуса 141. Понятно, что установочная прорезь 144 также может иметь другую соответствующую требованиям форму.
[00064] В некоторых вариантах реализации настоящего изобретения, как показано на фиг. 1, линейный лазерный передатчик 110 может иметь круглую цилиндрическую форму, на внешней стороне линейного лазерного передатчика 110 имеется конструкция 111 первой ступени, основной корпус 140 снабжен монтажной канавкой, выполненной с возможностью установки линейного лазерного передатчика 110, внутренняя стенка монтажной канавки снабжена конструкцией 149 второй ступени, посредством комбинации конструкции 111 первой ступени и конструкции 149 второй ступени возможно ограничивать перемещение линейного лазерного передатчика 110 вдоль оси, что повышает эффективность сборки.
[00065] В некоторых вариантах реализации настоящего изобретения линейный лазерный передатчик 110 имеет подвижное соединение с основным корпусом 140, который является подвижной конструкцией. Как показано на фиг. 2, основной корпус 140 включает в себя корпус 141 и концевые части 142, расположенные по обе стороны корпуса 141, первая камера 120 установлена в корпусе 141, а линейный лазерный передатчик установлен в концевой части 142. В некоторых вариантах реализации настоящего изобретения каждая концевая часть 142 шарнирно соединена с корпусом 141, например, концевая часть 142 шарнирно соединена с корпусом 141, так что концевая часть 142 может поворачиваться относительно корпуса 141, линейный лазерный передатчик 110 имеет поворотное соединение с корпусом 141, например, линейный лазерный передатчик 110 может иметь круглую цилиндрическую форму, и линейный лазерный передатчик 110 может поворачиваться относительно монтажной канавки в концевой части 142, что обеспечивает возможность регулировки угла поворота линейного лазерного передатчика 110 таким образом, чтобы линейный лазер был перпендикулярен горизонтальной плоскости, и увеличить диапазон измерения расстояния. Поскольку линейный лазерный передатчик 110 установлен на концевой части 142, и концевая часть 142 может поворачиваться относительно корпуса 141, имеется возможность регулировки азимута линейного лазерного передатчика 110 таким образом, чтобы световой пучок, излучаемый линейным лазерным передатчиков 110, находился в пределах угла обзора первой камеры 120.
[00066] Понятно, что, поскольку линейный лазерный передатчик 110 может поворачиваться относительно концевой части 142, концевая часть 142 шарнирно соединена с корпусом 141, так что в процессе сборки линейный лазерный передатчик 110 можно поворачивать в подходящее положение для регулировки угла поворота линейного лазерного передатчика 110, то есть имеется возможность регулировки линейного лазерного передатчика 110, путем поворота концевой части 142 относительно корпуса 141 в подходящее положение можно регулировать азимут линейного лазерного передатчика 110, имеется возможность регулировки азимута линейного лазерного передатчика 110, то есть можно вместе калибровать линейный лазерный передатчик 110 и первую камеру 120, что обеспечивает простоту в эксплуатации и установке. Понятно, что после регулировки угла поворота и азимута линейного лазерного передатчика 110 для фиксации концевой части 142, корпуса 141 и линейного лазерного передатчика 110 можно использовать фиксирующие средства, такие как связующие средства, клей и т.д., что легко и просто.
[00067] В некоторых вариантах реализации настоящего изобретения линейный лазерный передатчик 110 и основной корпус 140 подвижно соединены. Например, основной корпус 140 снабжен монтажной камерой, предназначенной для установки линейного лазерного передатчика 110, линейный лазерный передатчик 110 подвижно устанавливается в монтажной камере, которая имеет первый конец и второй конец, а площадь поперечного сечения первого конца меньше, чем площадь поперечного сечения второго конца, то есть монтажная камера представляет собой расширяющуюся конструкцию; то, что площадь поперечного сечения первого конца больше площади поперечного сечения линейного лазерного передатчика 110, указывает на то, что линейный лазерный передатчик 110 может двигаться в монтажной камере. При этом передний конец линейного лазерного передатчика 110 находится ближе к первому концу монтажной камеры, и когда линейный лазерный передатчик 110 поворачивается относительно оси монтажной камеры, угол поворота линейного лазерного передатчика 110 можно регулировать таким образом, чтобы лазерный световой пучок был перпендикулярен горизонтальной плоскости, что увеличивает диапазон измерения расстояния. Поворачивая задний конец линейного лазерного передатчика относительно переднего конца, можно регулировать азимут линейного лазерного передатчика таким образом, чтобы световой пучок, излучаемый линейным лазерным передатчиком 110, находился в пределах угла обзора первой камеры 120.
[00068] Понятно, что, поскольку линейный лазерный передатчик 110 является подвижным в монтажной камере основного корпуса 140, он может поворачиваться вокруг оси монтажной камеры и вокруг точки вращения (переднего конца) в монтажной камере, так что в процессе регулировки, правильно регулируя угол и положение установки линейного лазерного передатчика 110 и основного корпуса 140, можно откалибровать угол поворота и азимут линейного лазерного передатчика 110, это просто и удобно. Понятно, что после регулировки угла поворота и азимута линейного лазерного передатчика 110 линейный лазерный передатчик 110 и основной корпус 140 могут быть жестко соединены с помощью таких фиксирующих средств, как связующие вещества, клей и т.д., в результате чего линейный лазерный передатчик 110 крепится на основном корпусе 140, и сборка линейного лазерного передатчика 110 и основного корпуса 140 завершается, что очень просто.
[00069] В некоторых вариантах реализации настоящего изобретения основной корпус 140 является подвижной конструкцией. Как показано на фиг. 6, основной корпус 140 включает в себя корпус 141, концевые части 142 и соединительную часть 146, концевые части 142 расположены с обеих сторон корпуса 141, первая камера 120 установлена на корпусе 141, линейный лазерный передатчик установлен на концевой части 142, например, линейный лазерный передатчик 110 может быть закреплен неподвижно или иметь разъемное соединение с концевой частью 142. Соединительная часть 146 шарнирно соединена с корпусом 141, а концевая часть 142 соединена с соединительной частью 146, а шарнирное соединение соединительной части 146 относительно корпуса 141 позволяет регулировать азимута линейного лазерного передатчика 110, чтобы световой пучок, излучаемый линейным лазерным передатчиком 110, находился в поле зрения первой камеры 120. Благодаря подвижному соединению концевой части 142 и соединительной части 146, когда концевая часть 142 поворачивается относительно соединительной части 146, можно регулировать угол поворота линейного лазерного передатчика 110 таким образом, чтобы световой пучок линейного лазера был перпендикулярен горизонтальной плоскости, тем самым увеличивая диапазон измерения расстояния.
[00070] В некоторых вариантах реализации настоящего изобретения соединительная часть 146 шарнирно соединена с корпусом 141, соединительная часть 146 снабжена отверстием в направлении к одной стороне концевой части 142, концевая часть 142 снабжена круглым цилиндрическим выступом, соответствующим отверстию, и когда линейный лазерный передатчик 110 устанавливается на концевой части 142, цилиндрический выступ концевой части 142 входит в отверстие и поворачивается в нем для регулировки угла поворота линейного лазерного передатчика 110; когда линейный лазер перпендикулярен горизонтальной плоскости, концевая часть 142 и соединительная часть 146 зафиксированы, например, с помощью клея или другого фиксирующего средства, то есть обеспечивается возможность отладки линейного лазерного передатчика 110. Когда положение соединительной части 146 относительно корпуса 141 отрегулировано, можно регулировать азимут линейного лазерного передатчика 110; когда световой пучок, излучаемый линейным лазерным передатчиком 110, расположен в подходящем положении в пределах поля зрения первой камеры 120, корпус 141 и соединительную часть 146 можно зафиксировать, например, с помощью клея или другой фиксирующей ограничительной конструкции, то есть можно выполнять калибровку оптической системы, сформированной линейным лазерным передатчиком 110 и первой камерой 120. Понятно, что, поскольку основной корпус 140 является подвижной конструкцией, то есть концевая часть 142 подвижно соединена с корпусом 141 через соединительную часть 146, во время процесса калибровки путем правильной регулировки относительного положения концевой части 142, соединительной части 146 и корпуса 141 можно регулировать угол поворота и азимут линейного лазерного передатчика 110, установленного на концевой части 142, что просто в эксплуатации и калибровке. Понятно, что когда угол поворота и азимут линейного лазерного передатчика 110 откалиброваны, концевая часть 142, соединительная часть 146 и корпус 141 могут быть жестко соединены с помощью такого фиксирующего средства, как связующее средство, клей и пр., что очень просто.
[00071] В некоторых вариантах реализации данного изобретения основной корпус 140 является подвижной конструкцией. Как показано на фиг. 7, в одном из вариантов реализации данного изобретения основной корпус 140 включает в себя корпус 141, концевые части 142 и ограничительную часть 147, концевые части 142 располагаются с обеих сторон корпуса 141, первая камера 120 устанавливается в корпусе 141, линейный лазерный передатчик 110 устанавливается в концевой части 142. Как показано на фиг. 7, благодаря поворотному соединению концевой части 142 и корпуса 141, например, шарового соединения концевой части 142 и корпуса 141, обеспечивается возможность колебания концевой части 142 относительно корпуса 141, а также вращение относительно корпуса 141, а линейный лазерный передатчик 110 собирается в концевой части 142, таким образом обеспечивая возможность колебаний и вращения концевой части 142 относительно корпуса 141, что позволяет реализовать регулировку азимута и угла поворота линейного лазерного передатчика 110, что просто в использовании и удобно при калибровке.
[00072] В некоторых вариантах реализации данного изобретения концевая часть 142 и корпус 141 имеют шаровое соединение, на корпусе 141 имеется отверстие ограничителя 148, ограничительная часть 147 может быть крепежным винтом, а путем вращения концевой части 142 относительно корпуса 141 можно регулировать угол поворота линейного лазерного передатчика 110, когда линейный лазер перпендикулярен горизонтальной плоскости, можно калибровать линейный лазерный передатчик 110, путем регулировки положения колебания концевой части 142 относительно корпуса 141 можно отрегулировать азимут линейного лазерного передатчика 110, когда световой пучок линейного лазерного передатчика 110 находится в подходящем положении поля зрения первой камеры, можно выполнять отладку линейного лазерного передатчика 110 и первой камеры 120, после чего необходимо вставить в отверстие ограничителя 148 крепежный винт, чтобы закрепить положение концевой части 142 относительно корпуса 141, неподвижно соединив концевую часть 142 и корпус 141, что очень просто. Понятно, что отверстий ограничителя 148 на корпусе 141 может быть одно, два или несколько. Количество отверстий зависит от положений отверстий ограничителя 148, чтобы концевая часть 142 могла поворачиваться в нужные положения относительно корпуса 141, с помощью крепежного концевая часть 142 может неподвижно соединяться с корпусом 141 через отверстие ограничителя 148. При этом крепежные винты могут быть эластичными элементами, т.е. крепежный винт на стороне, соединяющейся с концевой частью 142, может быть эластичным элементом, который обеспечивает надежность соединения концевой части 142 с корпусом 141. Понятно, что на сферической поверхности концевой части 142 также может быть установочное отверстие, подходящее под крепежные винты, чтобы винт можно было вставить через отверстие ограничителя 148 и установочное отверстие, а после этого закрутить его, что повышает надежность соединения концевой части 142 и корпуса 141.
[00073] В некоторых вариантах реализации данного изобретения вышеупомянутый модуль линейного лазера включает в себя два линейных лазерных передатчика. В этом случае основной корпус имеет два конца и также включает в себя две соединительные части, которые соединяют два конца с основным корпусом соответственно, на двух концах расположены два линейных лазерных передатчика. Подробное описание соединения каждой из концевых частей с соединительной частью и корпусом описано выше и здесь повторяться не будет.
[00074] В некоторых вариантах реализации данного изобретения, как показано на фиг. 9, линейный лазерный передатчик 110 включает линейный лазерный генератор 1101 и мостовую схему лазера 1102, где мостовая схема лазера 1102 может принимать сигналы привода и в соответствии с этими сигналами приводить в действие линейный лазерный генератор 1101.
[00075] Далее, мостовая схема лазера 1102 может включать схему усилителя, которая предназначена для усиления приводного сигнала, который после усиления передается на линейный лазерный генератор 1101, чтобы генератор 1101 включил излучение. В некоторых вариантах реализации настоящего изобретения приводной сигнал может включать в себя управляющий сигнал и сигнал регулировки, управляющий сигнал отвечает за включение и выключение линейного лазерного генератора 1101, а сигнал регулировки позволяет регулировать производимую генератором 1101 мощность лазера.
[00076] В некоторых вариантах реализации изобретения, как показано на фиг. 9, схема усилителя включает схему первого усилителя 1102а и схему второго усилителя 1102b, где:
[00077] Схема первого усилителя 1102а предназначена для получения сигнала управления от главного блока управления 003, после усиления сигнал управления передается на линейный лазерный генератор 1101, управляя его включением и выключением;
[00078] Схема второго усилителя 1102b предназначена для получения сигнала регулировки от главного блока управления 003, после усиления сигнал передается на линейный лазерный генератор 1101, управляя мощностью генератора 1101.
[00079] Конкретное исполнение схем первого усилителя 1102а и второго усилителя 1102b здесь не имеет особых ограничений, главное, чтобы была реализована функция усиления сигнала.
[00080] В некоторых вариантах реализации данного изобретения, как показано на фиг. 8 и фиг. 9, модуль линейного лазера включает в себя устройство для получения второго изображения 002, котороев ключает в себя вторую камеру 130 и модуль обработки второго изображения 021, установленные в основном корпусе 140, вторая камера 130 предназначена для получения второго изображения окружающей среды. Устройство для получения второго изображения 002 соединяется с блоком главного управления 003 и принимает команды от блока главного управления 003. Например, вторая камера 130 соединяется с блоком главного управления 003 самоходного устройства, и блок главного управления 003 может управлять экспозицией второй камеры 130, вторая камера 130 по команде управления экспозицией от блока главного управления получает второе изображение окружающей среды, после этого блок главного управления проводит его анализ и обработку с целью распознавания типа препятствия.
[00081] В некоторых вариантах реализации данного изобретения первая камера 120, вторая камера 130 и линейный лазерный передатчик 110 работают вместе. По первому изображению от первой камеры 120 определяется расстояние до препятствия, по второму изображению от второй камеры 130 определяется тип препятствия. Поэтому по второму изображению от второй камеры 130 можно определить тип препятствия, а по типу определяется, нужно ли корпусу 200 устройства обходить препятствие. Если необходимо, первая камера 120 и линейный лазерный передатчик 110 определяют расстояние до препятствия, чтобы устройство могло выполнить соответствующее действие по его обходу. Если обходить препятствие не требуется, устройство просто продолжит предыдущее движение, таким образом уменьшая вероятность ошибки при обходе препятствий.
[00082] В некоторых вариантах реализации вторых изображений может быть 500, 1000 и другое количество по необходимости. Например, количество вторых изображений можно определить с помощью настройки частоты вспышки второй камеры 130. Блок главного управления сегментирует изображения, полученные второй камерой 130, и получает сегментированные изображения с обозначением типа препятствия. Затем это сегментированное изображение вводится в обученную модель обхода препятствия, затем из сегментированного изображения извлекаются признаки, извлеченная информация сопоставляется с обученной моделью обхода препятствия по коэффициенту доверия, и на основе результата сопоставления коэффициента доверия определяется тип препятствия.
[00083] Т.е. можно сказать, что модуль линейного лазера в варианте реализации данного изобретения через второе изображение окружающей среды, полученное с помощью второй камеры 130, может определять тип препятствий, и таким образом, самоходное устройство по типу препятствия может определить, необходимо ли ему обойти препятствие или продолжить предыдущую операцию. Если необходимо обойти препятствие, модуль управления будет управлять совместной работой первой камеры 120 и линейного лазерного передатчика 110, чтобы по первому изображению, полученному первой камерой 120, определить расстояние от препятствия до модуля линейного лазера или корпуса 200 устройства с целью обхода препятствия.
[00084] Например, если по второму изображению, полученному с помощью второй камеры 130, определяется, что препятствие это воздушный шар, который весит мало, приводная система может приводить в движение корпус 200 устройства, который будет двигать шар, то есть шар не повлияет на маршрут уборки. То есть, контроллер даст команду корпусу 200 устройства продолжить уборку по исходному маршруту без обхода препятствия, что позволит убрать место, где находится шар, повысит точность обхода препятствий и увеличит площадь уборки. Т.е. в таких ситуациях контроллер не задействует линейный лазерный передатчик 110 и первую камеру 120.
[00085] В другом примере по второму изображению окружающей среды, полученному второй камерой 130, определяется, что препятствием является стул, который имеет значительную массу. И если устройство 200 продолжит уборку по начальному маршруту, оно столкнется со стулом и может получить повреждения, то есть стул повлияет на маршрут уборки, поэтому модуль управления устройством инициирует обход препятствия корпусом 200 устройства для изменения маршрута уборки. Т.е. модуль управления устройством задействует линейный лазерный передатчик 110, первая камера 120 получает первое изображение, отраженное от стула, модуль управления устройством по первому изображению окружающей среды определяет расстояние между модулем линейного лазера или корпусом 200 устройства и стулом, а затем повторно планирует маршрут уборки в соответствии с определенным расстоянием таким образом, чтобы обойти препятствие, что улучшает результат обхода препятствий.
[00086] Далее, в примере реализации данного изобретения нет ограничений количеству вторых камер 130. Их может быть одна, две, три или другое количество. Понятно, что вторая камера 130 может быть монокулярной или бинокулярной. В некоторых вариантах реализации первая камера 120 и вторая камера 130 могут устанавливаться отдельно или объединяться в модуль камер. Что касается режима настроек первой камеры 120 и второй камеры 130, в данном изобретении нет конкретных ограничений.
[00087] В некоторых вариантах реализации настоящего изобретения оптическая ось первой камеры пересекается с горизонтом по направлению вниз, а оптическая ось второй камеры пересекается с горизонтом по направлению вверх. То есть можно сказать, что первая камера смотрит на убираемую поверхность сверху вниз, поэтому она настраивается так, чтобы видеть препятствия внизу. Вторая камера смотрит на убираемую поверхность снизу вверх, чтобы увидеть больше пространственных объектов и улучшить восприятие видео пользователем. Заключенный угол между оптической осью упомянутой первой камеры и горизонтом равен 7 градусам, а заключенный угол между оптической осью упомянутой второй камеры и горизонтом равен 5 градусам. То есть вторая камера смотрит снизу вверх, чтобы увидеть больше пространственных объектов и улучшить восприятие видео пользователем.
[00088] В некоторых вариантах реализации настоящего изобретения основной корпус может включать в себя первый конец и второй конец и соединительную часть, соединяющую первый конец и второй конец; модуль линейного лазера содержит два лазерных передатчика, установленных на первом конце и втором конце соответственно; первая и вторая камеры установлены в соединительной части.
[00089] В некоторых вариантах реализации данного изобретения первая камера 120 снимает в черно-белом цвете, то есть это инфракрасная камера. Перед черно-белой камерой установлена линза со светофильтром, которая может быть инфракрасной линзой, пропускающей только инфракрасный свет. Понятно, что линейный лазерный передатчик 110, который работает совместно с первой камерой, является инфракрасной лазерной трубкой, которая излучает инфракрасный лазер. Вторая камера 130 - это камера RGB, перед которой устанавливается линза со светофильтром, пропускающая видимый свет. Если линза ахроматическая, то пропускать она будет только видимый свет. Понятно, что первая камера 120 и вторая камера 130 могут иметь другое исполнение, здесь это не ограничивается.
[00090] В некоторых вариантах реализации данного изобретения первая камера 120 и вторая камера 130 установлены горизонтально в ряд, то есть первая камера 120 и вторая камера 130 расположены слева направо, и если первая камера 120 расположена слева от второй камеры 130, или первая камера 120 расположена справа от второй камеры 130, такое расположение уменьшает расстояние до модуля линейного лазера в вертикальном направлении и позволяет применять его в корпусе 200 устройства с габаритами поменьше в вертикальном направлении, что значительно расширяет сферу применения изделия. Понятно, что в таких ситуациях линейные лазерные передатчики 110 располагаются с обеих сторон первой камеры 120 и второй камеры 130, т.е. первая камера 120 и вторая камера 130 находятся по сторонам между двумя линейными лазерными передатчиками 110.
[00091] В некоторых вариантах реализации данного изобретения первая камера 120 и вторая камера 130 установлены вертикально в ряд, то есть первая камера и вторая камера 130 расположены сверху и снизу. Например, первая камера 120 расположена над второй камерой 130 или под ней; такое расположение уменьшает расстояние в горизонтальном направлении до модуля линейного лазера и позволяет применять его в корпусе 200 устройства с меньшими габаритами в горизонтальном направлении, значительно увеличивая сферу применения устройства. Понятно, что в таких ситуациях линейные лазерные передатчики 110 располагаются с обеих сторон первой камеры 120 и второй камеры 130, т.е. первая камера 120 и вторая камера 130 располагаются между двумя передатчиками 110 по сторонам.
[00092] Далее, основной корпус 140 включает корпус 141 и концевые части 142 по двум сторонам корпуса 141, первая камера 120 и вторая камера 130 устанавливаются на корпусе 141, линейный лазерный передатчик 110 устанавливается на концевой части 142. Благодаря подвижному соединению с концевой частью 142 линейный лазерный передатчик 110 имеет возможности колебаний и вращения относительно концевых частей 142, позволяя регулировать угол вращения и азимут линейного лазера.
[00093] В некоторых вариантах реализации данного изобретения, как показано на фиг. 9, модуль обработки второго изображения 021 может включать в себя модуль отбора признаков 0211 и модуль распознавания 0212, в том числе:
[00094] модуль отбора признаков 0211 предназначен для выделения признаков на втором изображении окружающей среды для получения информации о признаках; модуль распознавания 0212 предназначен для ввода информации о признаках в модель распознавания препятствий для идентификации типа препятствия.
[00095] Например, в качестве информации о признаках могут быть использованы отвечающие определенным условиям пиксели, содержащие уровень серого и данные местоположения, на втором изображении. Например, второе изображение окружающей среды может быть предварительно обработано с помощью модуля отбора признаков 0211, например, второе изображение окружающей среды может быть бинаризовано и т.д., и затем из предварительно обработанного второго изображения окружающей среды извлекается информация об уровне серого и информация о местоположении каждого пикселя. Затем заданный диапазон уровня серого сравнивается с информацией об уровнях серого каждого пикселя, и информация о уровнях серого в пределах заданного диапазона и информация о местоположении соответствующих пикселей используется в качестве признаков.
[00096] Конечно, информацию о признаках также можно извлекать из второго изображения и другими способами, здесь нет особых ограничений.
[00097] Модель распознавания препятствий может быть получена путем предварительного обучения выборок изображения препятствий. Это может быть модель нейронной сети, классификатор или другая модель, при условии, что она может по признакам определить, есть ли препятствие на втором изображении окружающей среды. Способ обучения модели распознаванию препятствий, а также подробный рабочий процесс определения наличия препятствий здесь не имеют особых ограничений.
Препятствиями в этом изобретении могут быть конфетти, книги, ножки столов, двери, холодильники, шторы и т.д., которые здесь перечисляться не будут.
[00098] Когда модуль распознавания 0212 определяет, есть ли на втором изображении окружающей среды препятствие, он может ввести информацию о признаках в модель классификации препятствий, чтобы идентифицировать тип препятствия.
[00099] Модель классификации препятствий может быть получена путем предварительного обучения выборок классификации препятствий. Это может быть модель нейронной сети, классификатор или другая модель, при условии, что на основе информации о признаках можно определить тип препятствия. Способ обучения модели распознаванию препятствий, а также подробный рабочий процесс определения наличия препятствий здесь не имеют особых ограничений. Соответственно, второй модуль обработки изображений 021 также включает в себя учебный модуль 0213, предназначенный для использования собранных обучающих данных, чтобы сгенерировать модель распознавания препятствий.
[000100] Информация о типе препятствия указывает, можно ли убрать препятствие и можно ли его обойти. В данном изобретении препятствия могут быть разделены на три типа по размеру, например:
[000101] Первый тип - это препятствия, которые можно преодолеть и которые можно убрать, например конфетти.
[000102] Второй тип - это препятствия, которые невозможно преодолеть, но которые необходимо убрать, например книги.
[000103] Третий тип - это препятствия, которые невозможно преодолеть и не требуется убирать, такие как двери, стены, ножки стола и т.д. В некоторых вариантах реализации настоящего изобретения, если препятствие обнаружено только на одном из первого и второго изображений окружающей среды, считается, что препятствие отсутствует. Например, если на первом изображении окружающей среды не обнаружена информация о расстоянии до препятствия, или если на втором изображении окружающей среды не обнаружена информация о типе препятствия, считается, что препятствия нет.
[000104] Если препятствие есть как на первом изображении окружающей среды, так и на втором изображении окружающей среды, считается, что препятствие имеется. При этом тип препятствия можно определить на основе второго изображения окружающей среды. Например, если принимается информация о расстоянии до препятствия и информация о типе препятствия, считается, что препятствие существует.
[000105] В случае препятствия первого типа модуль управления устройством делает так, чтобы самоходное устройство продолжало двигаться по текущей траекторией и убирало препятствие.
[000106] В случае препятствий второго и третьего типов по информации о расстоянии до препятствия определяется местоположение препятствия, и модуль управления устройством определяет расстояние до поворота, направление поворота и угол поворота самоходного устройства, чтобы заново спланировать маршрут перемещения в обход препятствия, а затем самоходное устройство выполняет обход препятствий в соответствии с маршрутом обхода, тем самым избегая препятствий, которые невозможно убрать.
[000107] Далее, в некоторых вариантах реализации настоящего изобретения самоходное устройство может включать в себя устройство оповещения, которое может быть подключено к модулю управления устройством, модуль управления устройством может управлять устройством оповещения, чтобы оно издавало как минимум либо звуковой сигнал, либо световой сигнал тревоги. В случае препятствий второго типа возможно не только повторное планирование маршрута в обход, но также возможна подача звукового сигнала через устройство оповещения, чтобы во время обхода препятствия оповещать пользователя о необходимости убрать препятствия, которые не могут быть убраны самоходным устройством.
[000108] Данное изобретение описано в виде вышеупомянутых вариантов реализации, но следует понимать, что эти варианты приведены только в иллюстративных целях и не предназначены для ограничения области применения данного изобретения лишь приведенными вариантами реализации. Кроме того, специалисты в данной области техники могут понять, что изобретение не ограничивается вышеупомянутыми вариантами реализации, и, руководствуясь этим изобретением, можно создать еще больше вариантов и модификаций, которые входят в область защиты этого изобретения.
Данное изобретение относится к самоходному устройству для уборки, содержащему корпус устройства и приводную систему, при этом корпус устройства снабжен первой камерой, линейным лазерным передатчиком и модулем обработки первого изображения, линейный лазерный передатчик предназначен для излучения инфракрасного света, имеющего линейную проекцию, наружу из корпуса устройства, первая камера представляет собой камеру инфракрасного света и предназначена для получения первого изображения окружающей среды, включающего инфракрасный свет, а модуль обработки первого изображения предназначен для получения информации о расстоянии до препятствия по первому изображению окружающей среды, и корпус устройства также снабжен второй камерой и модулем обработки второго изображения, вторая камера представляет собой RGB камеру и предназначена для получения второго изображения окружающей среды, а модуль обработки второго изображения предназначен для получения информации о типе препятствия по второму изображению окружающей среды. Технический результат заявленной группы изобретений заключается в повышении точности распознавания препятствий самоходным устройством для уборки и облегчении их обхождения с достаточной точностью. 2 н. и 18 з.п. ф-лы, 9 ил.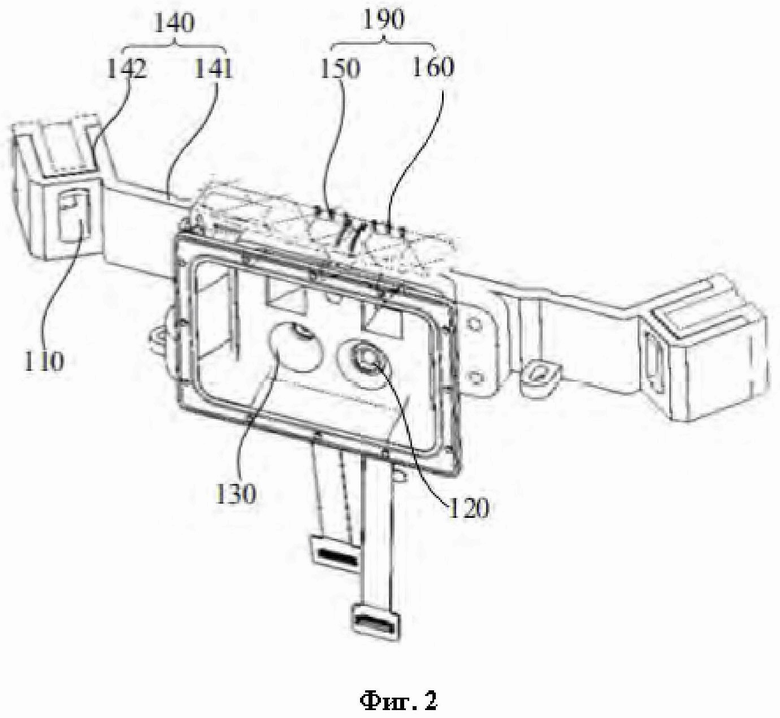
1. Самоходное устройство для уборки, содержащее корпус устройства и приводную систему,
при этом корпус устройства снабжен первой камерой, линейным лазерным передатчиком и модулем обработки первого изображения, линейный лазерный передатчик предназначен для излучения инфракрасного света, имеющего линейную проекцию, наружу из корпуса устройства, первая камера представляет собой камеру инфракрасного света и предназначена для получения первого изображения окружающей среды, включающего инфракрасный свет, а модуль обработки первого изображения предназначен для получения информации о расстоянии до препятствия по первому изображению окружающей среды; и
корпус устройства также снабжен второй камерой и модулем обработки второго изображения, вторая камера представляет собой RGB камеру и предназначена для получения второго изображения окружающей среды, а модуль обработки второго изображения предназначен для получения информации о типе препятствия по второму изображению окружающей среды.
2. Самоходное устройство для уборки по п. 1, в котором модуль обработки первого изображения получает информацию о расстоянии до препятствия методом триангуляции.
3. Самоходное устройство для уборки по п. 1, в котором модуль обработки второго изображения включает в себя:
модуль отбора признаков для извлечения признаков из второго изображения окружающей среды для получения информации о признаках; и
модуль распознавания для ввода информации о признаках в заранее обученную модель распознавания препятствий, чтобы распознавать типы препятствий.
4. Самоходное устройство для уборки по п. 3, в котором модуль обработки второго изображения включает в себя:
обучающий модуль для генерирования модели распознавания препятствий путем использования полученных обучающих данных.
5. Самоходное устройство для уборки по п. 1, которое
также включает в себя первую линзу со светофильтром, предназначенную для того, чтобы в первую камеру проникал только инфракрасный свет, и установленную на стороне первой камеры, удаленной от корпуса устройства, или
самоходное устройство для уборки также включает в себя вторую линзу со светофильтром, предназначенную для того, чтобы во вторую камеру проникал только видимый свет, и установленную на стороне второй камеры, удаленной от корпуса устройства.
6. Самоходное устройство для уборки по п. 1, в котором
корпус устройства также снабжен устройством позиционирования для возврата к зарядной станции, которое поддерживает связь с зарядной станцией.
7. Самоходное устройство для уборки по п. 1, в котором
корпус устройства также снабжен модулем управления устройством для управления приводной системой так, чтобы вызывать перемещение самоходного устройства для уборки согласно информации о расстоянии до препятствия и информации о типе препятствия.
8. Самоходное устройство для уборки по п. 1, также включающее:
буферный элемент, установленный на удаленных от самоходного устройства для уборки сторонах упомянутых устройств для получения первого и второго изображений и имеющий отверстия напротив упомянутых устройств для получения первого и второго изображений.
9. Самоходное устройство для уборки, содержащее:
первую камеру и линейный лазерный передатчик, при этом линейный лазерный передатчик предназначен для излучения инфракрасного света, имеющего линейную проекцию, наружу из корпуса самоходного устройства для уборки, первая камера представляет собой камеру инфракрасного света и предназначена для получения первого изображения окружающей среды, включающего инфракрасный свет;
вторую камеру, которая представляет собой RGB камеру и предназначена для получения второго изображения окружающей среды; и
главный блок управления, предназначенный для получения информации о расстоянии до препятствия по первому изображению окружающей среды и информации о типе препятствия по второму изображению окружающей среды.
10. Самоходное устройство для уборки по п. 9, которое также содержит первую линзу со светофильтром, предназначенную для того, чтобы в первую камеру проникал только инфракрасный свет.
11. Самоходное устройство для уборки по п. 9 или 10, которое также содержит вторую линзу со светофильтром, предназначенную для того, чтобы во вторую камеру проникал только видимый свет.
12. Самоходное устройство для уборки по п. 9, в котором главный блок управления получает информацию о расстоянии до препятствия методом триангуляции.
13. Самоходное устройство для уборки по п. 9, в котором главный блок управления включает в себя:
модуль отбора признаков для извлечения признаков из второго изображения окружающей среды для получения информации о признаках; и
модуль распознавания для ввода информации о признаках в заранее обученную модель распознавания препятствий, чтобы распознавать типы препятствий.
14. Самоходное устройство для уборки по п. 10, в котором первая линза со светофильтром расположена перед первой камерой.
15. Самоходное устройство для уборки по п. 11, в котором вторая линза со светофильтром расположена перед второй камерой.
16. Самоходное устройство для уборки по п. 9, также содержащее:
корпус устройства с расположенным на нем модулем управления устройством,
при этом модуль управления устройством предназначен для управления самоходным устройством для уборки для его перемещения согласно информации о расстоянии до препятствия и информации о типе препятствия.
17. Самоходное устройство для уборки по п. 9, в котором первая оптическая ось первой камеры наклонена вниз по отношению к горизонту, а вторая оптическая ось второй камеры наклонена вверх по отношению к горизонту.
18. Самоходное устройство для уборки по п. 9, в котором первая и вторая камеры расположены рядом друг с другом в вертикальном направлении.
19. Самоходное устройство для уборки по п. 9, также включающее:
буферный элемент, установленный на передней стороне самоходного устройства для уборки и имеющий отверстия напротив первой камеры и второй камеры.
20. Самоходное устройство для уборки по п. 19, в котором буферный элемент снабжен лампой подсветки, расположенной снаружи от упомянутых отверстий.
| CN 112864778 A, 28.05.2021 | |||
| CN 211012988 U, 14.07.2020 | |||
| CN 110974083 A, 10.04.2020 | |||
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |

