Перекрестные ссылки на связанные заявки
[0001] Данная заявка притязает на приоритет на основе китайской заявки с номером 202110614386.5, поданной 2 июня 2021 г., все ее содержание включено в данный документ путем ссылки.
Область техники
[0002] Настоящее изобретение относится к самоходному устройству.
Уровень техники
[0003] Как одна из разновидностей интеллектуальных роботов, самоходное устройство способно автоматически выполнять работы по уборке пола, используя искусственный интеллект.
[0004] Из-за ограничений в алгоритмах обхода препятствий в известных технологиях, самоходное устройство иногда не может точно определить, следует ли на маршруте уборки обходить препятствие, что приводит к тому, что уборка не выполняется там, где должна, или происходит столкновение с препятствием.
Раскрытие сущности изобретения
[0005] В первом аспекте настоящего изобретения представлено самоходное устройство, которое включает в себя устройство для получения первого изображения, устройство для получения второго изображения и контроллер; устройство для получения первого изображения включает в себя передающий компонент для передачи инфракрасного сигнала и первый датчик для приема первого изображения, сформированного после отражения инфракрасного сигнала целевым объектом; на основе первого изображения определяется расстояние до целевого объекта; устройство для получения второго изображения включает в себя второй датчик, который принимает второе изображение, сформированное после отражения видимого света от целевого объекта, и по второму изображению определяется тип целевого объекта; контроллер управляет работой самоходного устройства, используя, как минимум, либо полученную информацию о расстоянии, либо информацию о типе.
[0006] Во втором аспекте настоящего изобретения представлен способ управления самоходным устройством, который включает в себя следующее: принимающий компонент устройства для получения первого изображения передает инфракрасный сигнал; первый датчик устройства для получения первого изображения принимает первое изображение, сформированное после отражения инфракрасного сигнала целевым объектом; второй датчик устройства для получения второго изображения принимает второе изображение целевого объекта, сформированное после отражения целевым объектом; на основе первого изображения определяется расстояние до целевого объекта; на основе второго изображения определяется информация о типе целевого объекта; на основе либо расстояния, либо типа осуществляется управление движением самоходного устройства.
[0007] В одном из вариантов реализации настоящего изобретения передающий компонент содержит, по меньшей мере, один линейный лазер, который передает инфракрасный сигнал, первое изображение захватывается с помощью первого датчика; первое изображение содержит информацию о световом пучке линейного лазера, отраженном от целевого объекта.
[0008] В одном из вариантов реализации настоящего изобретения, по меньшей мере, один линейный лазер включает в себя первый блок линейного лазера и второй блок линейного лазера; в направлении проекции самоходного устройства линия соединения точки пересечения световых пучков, излучаемых первым блоком линейного лазера и вторым блоком линейного лазера, и первого датчика параллельна направлению движения самоходного устройства вперед.
[0009] В одном из вариантов реализации настоящего изобретения первый линейный лазер и второй линейный лазер излучают одновременно или поочередно.
[00010] В одном из вариантов реализации настоящего изобретения оно также включает в себя первый датчик, который используется для захвата фонового изображения, которое не содержит информации о световом пучке первого линейного лазера и второго линейного лазера, отраженном целевым объектом.
[00011] В одном из вариантов реализации настоящего изобретения устройство для получения второго изображения также включает в себя лампу подсветки, по меньшей мере часть видимого света, излучаемого лампой подсветки, отражается от целевого объекта и попадает во второй датчик.
[00012] В одном из вариантов реализации настоящего изобретения контроллер включает или выключает лампу подсветки в зависимости от освещенности окружающей среды.
[00013] В одном из вариантов настоящего изобретения на основе первого изображения определяется информация о наблюдаемых трехмерных координатах целевого объекта относительно устройства получения первого изображения; и на основе этой информации о наблюдаемых трехмерных координатах определяются трехмерные координаты целевого объекта относительно земли.
[00014] В одном из вариантов реализации настоящего изобретения для распознавания второго изображения с целью определения типа целевого объекта используется нейронная сеть.
[00015] В одном из вариантов реализации настоящего изобретения на основе типа определяется соответствие между целевым объектом и данными в словаре для получения результата подтверждения; на основе информации о расстоянии определяется ориентация целевого объекта; на основе результата подтверждения и/или ориентации целевого объекта осуществляется управление соответствующими алгоритмами движения самоходного устройства.
[00016] В одном из вариантов реализации настоящего изобретения первый блок линейного лазера как минимум в одном линейном лазере излучает первый пучок света; первый датчик захватывает изображение первого светового пучка, включающее в себя световой пучок первого линейного лазера, отраженный целевым объектом; второй линейный лазерный блок как минимум в одном линейном лазере излучает второй световой пучок; первый датчик захватывает изображение второго светового пучка, включая световой пучок второго линейного лазера, отраженный целевым объектом.
[00017] В третьем аспекте настоящего изобретения предусмотрен способ управления самоходным устройством, в том числе: ИК-сигнал используется для получения информации о расстоянии до целевого объекта, а сигнал видимого света - для получения информации о типе целевого объекта; на основе информации о типе определяется соответствие между типом целевого объекта и данными в словаре для получения результата подтверждения; на основе результата подтверждения либо информации о расстоянии самоходное устройство выбирает для целевого объекта алгоритм обхода препятствий.
[00018] В одном из вариантов реализации настоящего изобретения для получения информации о расстоянии до целевого объекта используется инфракрасный оптический сигнал, а для получения информации о типе целевого объекта - сигнал видимого света, в том числе: передающий компонент устройства для получения первого изображения передает инфракрасный оптический сигнал; первый датчик устройства для получения первого изображения принимает первое изображение, сформированное после того, как инфракрасный сигнал отражается целевым объектом; второй датчик устройства для получения второго изображения принимает изображение целевого объекта в видимом свете и формирует второе изображение; на основе первого изображения определяется расстояние между целевым объектом и устройством для получения изображения на самоходном устройстве; на основе второго изображения определяется тип целевого объекта.
[00019] В одном из вариантов реализации настоящего изобретения передающий компонент содержит по меньшей мере один линейный лазер, который передает инфракрасный сигнал, первое изображение захватывается с помощью первого датчика и включает в себя информацию о световом пучке линейного лазера, отраженном от целевого объекта.
[00020] В одном из вариантов реализации настоящего изобретения второй датчик устройства для получения второго изображения принимает изображение целевого объекта в видимом свете и формирует второе изображение.
[00021] В одном из вариантов реализации настоящего изобретения устройство для получения второго изображения также включает в себя лампу подсветки, по меньшей мере часть видимого света, излучаемого лампой подсветки, отражается от целевого объекта и попадает во второй датчик.
[00022] В одном из вариантов реализации настоящего изобретения на основе типа целевого объекта определяется соответствие между типом целевого объекта и данными в словаре для получения результата подтверждения, в том числе: если тип целевого объекта находится в словаре, результат подтверждения показывает, что целевой объект относится к черному списку или белому списку; если тип целевого объекта не находится в словаре, результат подтверждения показывает, что объект не относится ни к черному списку, ни к белому списку.
[00023] В одном из вариантов реализации настоящего изобретения самоходное устройство выбирает для целевого объекта алгоритм обхода препятствий либо на основе результата подтверждения, либо на основе информации о расстоянии, в том числе: если результат подтверждения показывает, что объект относится к черному списку или не относится к белому списку, самоходное устройство обходит целевой объект.
[00024] В одном из вариантов реализации настоящего изобретения самоходное устройство обходит целевой объект, в том числе: когда расстояние между самоходным устройством и целевым объектом меньше или равно первому заранее заданному значению, самоходное устройство снижает скорость, и/или, когда расстояние между самоходным устройством и целевым объектом меньше или равно второму заранее заданному значению, устройство движется по траектории в обход, при этом первое заданное значение больше второго заданного значения.
[00025] В одном из вариантов реализации настоящего изобретения самоходное устройство обходит целевой объект, в том числе: на основании информации о расстоянии определяется местоположение и ориентация целевого объекта; на основе информации о местоположении и ориентации самоходное устройство обходит целевой объект.
[00026] В одном из вариантов реализации настоящего изобретения самоходное устройство применяет для целевого объекта алгоритм обхода препятствий либо на основе результата подтверждения, либо на основе информации о расстоянии, в том числе: если результат подтверждения показывает, что объект не относится к черному списку или относится к белому списку, самоходное устройство продолжает движение вперед по заранее заданному алгоритму.
[00027] В одном из вариантов реализации настоящего изобретения самоходное устройство продолжает движение вперед по заранее заданному алгоритму, в том числе: на основе информации, полученных от других датчиков, кроме первого датчика и второго датчика, самоходное устройство продолжает движение вперед.
[00028] В одном из вариантов реализации настоящего изобретения самоходное устройство применяет алгоритм обхода препятствий на основе либо результата подтверждения, либо информации о расстоянии: если результат подтверждения не содержит тип целевого объекта, то самоходное устройство применяет алгоритм обхода препятствия на основе информации о расстоянии.
[00029] В одном из вариантов реализации настоящего изобретения самоходное устройство на основе информации о расстоянии снижает скорость движения или скорость работы нижних боковых щеток.
[00030] В третьем аспекте настоящего изобретения представлен способ управления самоходным устройством, в том числе: ИК-сигнал используется для получения информации о расстоянии до целевого объекта, а сигнал видимого света - для получения информации о типе целевого объекта; на основе полученной информации о типе определяется соответствие между типом целевого объекта и данными в словаре для получения результата подтверждения; на основе либо результата подтверждения, либо информации о расстоянии самоходное устройство применяет алгоритм обхода препятствий к целевому объекту.
[00031] В одном из вариантов реализации настоящего изобретения для получения информации о расстоянии до целевого объекта используется инфракрасный оптический сигнал, а для получения информации о типе целевого объекта - сигнал видимого света, в том числе: передающий компонент устройства для получения первого изображения передает инфракрасный оптический сигнал; первый датчик устройства для получения первого изображения принимает первое изображение, сформированное после того, как инфракрасный сигнал отражается целевым объектом; второй датчик устройства для получения второго изображения принимает изображение целевого объекта в видимом свете и формирует второе изображение; на основе первого изображения определяется расстояние между целевым объектом и устройством для получения изображения на самоходном устройстве; на основе второго изображения определяется информация о типе целевого объекта.
[00032] В одном из вариантов реализации настоящего изобретения передающий компонент содержит, по меньшей мере, один линейный лазер, как минимум один линейный лазер излучает инфракрасный световой пучок, первый датчик захватывает первое изображение, которое включает в себя данные о пучке света линейного лазера, отраженном от целевого объекта.
[00033] В одном из вариантов реализации настоящего изобретения второй датчик устройства для получения второго изображения принимает изображение целевого объекта в видимом свете и формирует второе изображение.
[00034] В одном из вариантов реализации настоящего изобретения устройство для получения второго изображения дополнительно содержит лампу подсветки, по меньшей мере часть света, излучаемого лампой подсветки, отражается от целевого объекта и попадает во второй датчик.
[00035] В одном из вариантов реализации настоящего изобретения на основе информации о типе определяется соответствие между типом целевого объекта и данными в словаре для получения результата подтверждения, в том числе: если тип целевого объекта находится в словаре данных, определяется, что объект относится к черному списку или белому списку; если тип целевого объекта не находится в словаре, определяется, что объект не относится ни к черному списку, ни к белому списку.
[00036] В одном из вариантов реализации настоящего изобретения самоходное устройство выбирает для целевого объекта алгоритм обхода препятствий либо на основе результата подтверждения, либо на основе информации о расстоянии, в том числе: если результат подтверждения показывает, что объект относится к черному списку или не относится к белому списку, самоходное устройство обходит целевой объект.
[00037] В одном из вариантов реализации настоящего изобретения самоходное устройство обходит целевой объект, в том числе: когда расстояние между самоходным устройством и целевым объектом меньше или равно первому заранее заданному значению, самоходное устройство снижает скорость, и/или, когда расстояние между самоходным устройством и целевым объектом меньше или равно второму заранее заданному значению, применяется обходная траектория, при этом первое заданное значение больше второго заданного значения.
[00038] В одном из вариантов реализации настоящего изобретения самоходное устройство обходит целевой объект, в том числе: когда на основе информации о расстоянии определяется местоположение и ориентация целевого объекта; на основе информации о местоположении и ориентации самоходное устройство обходит целевой объект.
[00039] В одном из вариантов реализации настоящего изобретения самоходное устройство применяет для целевого объекта алгоритм обхода препятствий либо на основе результата подтверждения, либо на основе информации о расстоянии, в том числе: если результат подтверждения показывает, что объект не относится к черному списку или относится к белому списку, самоходное устройство продолжает движение вперед по заранее заданному алгоритму.
[00040] В одном из вариантов реализации настоящего изобретения самоходное устройство продолжает движение вперед по заранее заданному алгоритму, в том числе: на основе информации, полученных от других датчиков, кроме первого датчика и второго датчика, самоходное устройство продолжает движение вперед.
[00041] В одном из вариантов реализации настоящего изобретения самоходное устройство применяет алгоритм обхода препятствий на основе либо результата подтверждения, либо информации о расстоянии: если результат подтверждения не содержит тип целевого объекта, то самоходное устройство применяет алгоритм обхода препятствия на основе информации о расстоянии.
[00042] В одном из вариантов реализации настоящего изобретения самоходное устройство на основе информации о расстоянии снижает скорость движения или скорость работы нижних боковых щеток.
[00043] В четвертом аспекте настоящего изобретения предусмотрен способ управления самоходным устройством, который включает в себя получение информации о расстоянии до целевого объекта и о типе целевого объекта; на основе информации о типе определяется результат подтверждения типа целевого объекта; если результат подтверждения не возвращается или не содержит тип целевого объекта, то на основе информации о расстоянии самоходное устройство применяет к целевому объекту алгоритм обхода препятствий.
[00044] В одном из вариантов реализации настоящего изобретения устройство получает информацию о расстоянии до целевого объекта и о типе целевого объекта, в том числе передающий компонент устройства для получения первого изображения передает инфракрасный оптический сигнал; первый датчик устройства для получения первого изображения принимает первое изображение, сформированное после того, как инфракрасный сигнал отражается целевым объектом; второй датчик устройства для получения второго изображения принимает изображение целевого объекта в видимом свете и формирует второе изображение; на основе первого изображения определяется расстояние между целевым объектом и устройством для получения изображения на самоходном устройстве; на основе второго изображения определяется тип целевого объекта.
[00045] В одном из вариантов реализации настоящего изобретения второй датчик устройства для получения второго изображения принимает изображение целевого объекта в видимом свете и формирует второе изображение.
[00046] В одном из вариантов реализации настоящего изобретения устройство для получения второго изображения также включает в себя лампу подсветки, по меньшей мере часть видимого света, излучаемого лампой подсветки, отражается от целевого объекта и попадает во второй датчик.
[00047] В одном из вариантов реализации настоящего изобретения, на основе информации о расстоянии самоходное устройство применяет к целевому объекту алгоритм обхода препятствий, в том числе: на основании информации о расстоянии определяется соответствие между размером целевого объекта и заранее заданным размеров объекта; на основе этого соотношения самоходное устройство применяет для целевого объекта алгоритм обхода препятствий.
[00048] В одном из вариантов реализации настоящего изобретения на основе соотношения размеров самоходное устройство применяет к целевому объекту алгоритм обхода препятствий, в том числе: если размер целевого объекта больше заранее заданного размера объекта, самоходное устройство снижает скорость движения при приближении к целевому объекту.
[00049] В одном из вариантов реализации настоящего изобретения на основании соотношения размеров самоходное устройство применяет к целевому объекту алгоритм обхода препятствий, в том числе: если размер целевого объекта не превышает заранее заданного размера объекта, самоходное устройство при приближении к целевому объекту снижает скорость вращения боковых щеток.
[00050] Самоходное устройство и способ управления им в данном изобретении реализуется следующим образом: через устройство для получения первого изображения и устройство для получения второго изображения самоходное устройство по отдельности получает первое изображение и второе изображение, и на их основе определяет расстояние и тип, и затем на основе либо расстояния, либо типа определяет свои дальнейшие действия.
Описание прилагаемых чертежей
[00051] Чертежи, прилагаемые к подробному описанию вариантов реализации данного изобретения ниже, помогут легче понять цели, особенности и преимущества этого изобретения. Чертежи являются лишь схематическими иллюстрациями настоящего изобретения и не обязательно выполнены в масштабе. Одни и те же обозначения на чертежах всегда обозначают одни и те же или похожие детали. В том числе:
[00052] На фиг.1 представлено частичное схематическое изображение конструкции самоходного устройства согласно иллюстративному варианту реализации изобретения.
[00053] На фиг.2А показана принципиальная схема работы линейного лазерного передатчика согласно иллюстративному варианту реализации.
[00054] На фиг.2В показано схематическое изображение соответствия между передатчиком линейного лазера и углом обзора первого устройства камеры согласно иллюстративному варианту реализации.
[00055] На фиг.3 показана логическая блок-схема способа управления самоходным устройством согласно иллюстративному варианту реализации; на фиг.4А показана блок-схема одного из способов управления самоходным устройством согласно иллюстративному варианту реализации.
[00056] На фиг.4А показана схема способа управления самоходным устройством согласно иллюстративному варианту реализации.
[00057] На фиг.4В показана технологическая схема последовательности работы устройства для получения первого изображения на самоходном устройстве согласно первому иллюстративному варианту реализации.
[00058] На фиг.4С показана технологическая схема последовательности работы устройства для получения первого изображения на самоходном устройстве согласно второму иллюстративному варианту реализации.
[00059] На фиг.4D показана технологическая схема последовательности работы устройства для получения первого изображения на самоходном устройстве согласно третьему иллюстративному варианту реализации.
[00060] На фиг.5 показана блок-схема способа управления самоходным устройством согласно еще одному иллюстративному варианту реализации.
[00061] На фиг.6 показано схематическое изображение машиночитаемого носителя информации в иллюстративном варианте реализации изобретения.
[00062] На фиг.7 показано схематическое изображение электронного устройства в иллюстративном варианте реализации настоящего изобретения.
[00063] Пояснения к обозначениям на чертежах:
[00064] 10. Корпус робота; 20. Устройство для получения первого изображения; 21. Первый линейный лазерный блок; 22. Второй линейный лазерный блок; 23. Камера линейного лазера; 30. Устройство для получения второго изображения; 31. Идентификационная камера; 32. Лампа подсветки;
[00065] 300. Программный продукт; 600. Электронное устройство; 610. Процессор; 620. Блок памяти; 6201. Блок запоминающего устройства с произвольным доступом (RAM); 6202. Блок кэш-памяти; 6203. Блок постоянного запоминающего устройства (ROM); 6204. Программа/утилита; 6205. Программный модуль; 630. Шина; 640. Блок отображения; 650. Интерфейс ввода/вывода (I/O); 660. Сетевой адаптер; 700. Внешнее устройство.
Конкретные варианты реализации
[00066] Ниже приводится описание типичных вариантов реализации, в которых отражены характеристики и преимущества данного изобретения. Следует понимать, что данное изобретение в разных вариантах реализации может иметь модификации, которые не выходят за рамки данного изобретения, описание и чертежи по существу предназначены только для иллюстрации, а не для ограничения этого изобретения.
[00067] В следующих описаниях различных иллюстративных вариантов реализации настоящего изобретения имеются ссылки на сопроводительные чертежи, которые являются частью настоящего изобретения и показывают различные примеры конструкции, системы и этапов во множестве аспектов, которые позволяют реализовать настоящее изобретение. Следует понимать, что могут быть использованы и другие особые решения с применением компонентов, конструкций, иллюстративных устройств, систем и этапов, а также возможны модификации конструкции и функций без отклонения от сферы применения настоящего изобретения. Более того, хотя в данном документе для описания различных иллюстративных характеристик и элементов данного изобретения используются термины "над", "между", "под" и т.д., они используются только для удобства, например, чтобы показать пример направления на чертежах. Ничто в содержании данного документа не должно пониматься как требование конкретной ориентации конструкции в трех измерениях, чтобы она могла попасть в объем настоящего изобретения.
[00068] В техническом решении, предусмотренном в варианте реализации настоящего изобретения, самоходное устройство включает в себя корпус робота 10. Корпус робота 10 может иметь форму, приближенную к круглой, или может иметь другие формы, включая, помимо прочего, D-образную форму с округлой передней или задней частью.
[00069] Самоходное устройство может также включать в себя уборочную систему, сенсорную систему, систему управления, приводную систему, энергетическую систему, систему человеко-машинного взаимодействия и т.д. Все системы скоординированы и взаимодействуют друг с другом, благодаря чему самоходное устройство способно самостоятельно перемещаться и выполнять функции уборки. Функциональные компоненты, составляющие указанные выше системы самоходного устройства, могут быть интегрированы в корпус робота 10. Корпус робота 10 может включать в себя верхнюю крышку, основание и центральную раму, расположенную между верхней крышкой и основанием. Центральная рама может служить каркасом для установки разных функциональных компонентов. Верхняя крышка и основание закрывают поверхность корпуса устройства, обеспечивая защиту внутренних деталей. Также это улучшает внешний вид самоходного устройства.
[00070] Уборочная система может включать в себя блок влажной уборки, блок сухой уборки и узел боковых щеток.
[00071] Блоком сухой уборки может быть валиковая щетка для подметания, установленная в нижней части самоходного устройства. При выполнении сухой уборки валиковая щетка для подметания работает вместе с пылесборником и вентилятором, установленными в роботе, для всасывания загрязнений в пылесборник за счет отрицательного давления, создаваемого вентилятором. Блок влажной уборки может располагаться за блоком сухой уборки, чаще всего блок влажной уборки может состоять из ткани, губки и другого эластичного гигроскопичного материала. Самоходное устройство оснащено резервуаром для жидкости, вода из которого разбрызгивается на блок влажной уборки для влажной уборки поверхности.
[00072] Сенсорная система используется для распознавания самоходным устройством таких параметров внешней среды, как рельеф поверхности и положение самого самоходного устройства; система предоставляет различную информацию о местоположении и о состоянии движения в систему управления самоходного устройства.
[00073] Буфер предназначен для смягчения ударов при столкновении интеллектуального уборочного устройства с окружающими объектами во время движения. Поверхность буфера покрыта слоем мягкой резины и при установке на корпусе устройства между ним и корпусом имеется определенный зазор, который обеспечивает корпусу устройства достаточное время для замедления в случае столкновения.
[00074] Система управления установлена на основной печатной плате внутри корпуса устройства; понятно, что на основной печатной плате имеются различные схемы, управляющие работой интеллектуального уборочного устройства. Система управления включает в себя энергонезависимую память, вычислительный процессор и пр. Вычислительный процессор может быть центральным процессором, процессором приложений и т.д., который на основе информации о целевом объекте, передаваемой лазерным дальномером, алгоритмом позиционирования в режиме реального времени выстраивает карту среды, где находится интеллектуальное уборочное устройство. В сочетании с информацией о расстоянии и скорости, полученной буфером и датчиками, он определяет текущее рабочее состояние интеллектуального уборочного устройства, например, при пересечении порога, при попадании на ковер, при достижении обрыва, при застревании верхней или нижней части, при заполнении пылесборника, при подъеме и т.д. Также процессор рассчитывает конкретные следующие действия в различных ситуациях, чтобы работа интеллектуального уборочного устройства больше соответствовала требованиям пользователя.
[00075] Приводная система может управлять перемещением самоходного устройства по поверхности, используя управляющие команды на основе информации о расстоянии и угле наклона. Приводная система включает в себя модуль ведущего колеса, который может одновременно управлять левым и правым колесами; для более точного управления движением машины модуль ведущего колеса включает в себя модуль левого ведущего колеса и модуль правого ведущего колеса соответственно. Модуль левого ведущего колеса и модуль правого ведущего колеса расположены вдоль поперечной оси, которая определяется корпусом устройства. Для того чтобы самоходное устройство могло более устойчиво передвигаться по поверхности или было более маневренным, оно может включать в себя одно или несколько ведомых колес, которые включают в себя, помимо прочего, всенаправленное колесо. Модуль ведущего колеса включает в себя ходовое колесо, приводной двигатель и схему управления приводным двигателем; модуль ведущего колеса также может быть подключен к схеме для измерения тока возбуждения и к спидометру.
[00076] Система человеко-машинного взаимодействия включает в себя кнопки на панели главного блока для выбора функций пользователем; также она может включать в себя экран, и/или индикаторы, и/или динамики; экран, индикаторы и динамики помогают пользователю понять текущее состояние машины или выбирать функции; также система может включать в себя мобильное клиентское приложение. Самоходное устройство может через мобильную клиентскую программу показывать пользователю карту окружающей среды, в которой находится робот, местоположение самоходного устройства и информацию о состоянии самоходного устройства.
[00077] Система питания обеспечивает электрическую энергию для работы функциональных компонентов каждой системы, включает в себя аккумуляторные батареи и цепи питания. Аккумуляторы могут быть никель-металлогидридными и литиевыми. Когда емкость аккумулятора опускается ниже заданного минимального значения, аккумулятор можно зарядить через зарядный электрод, расположенный сбоку или в нижней части корпуса устройства, или путем подключения к зарядному устройству.
[00078] В варианте реализации изобретения конкретное местоположение устройства для получения первого изображения 20, первого блока линейного лазера 21, второго блока линейного лазера 22, лампы подсветки 32 и устройства для получения второго изображения 30 в корпусе робота 10 не ограничивается. Например, это может быть, помимо прочего, передняя сторона, задняя сторона, левая сторона, правая сторона, верх, середина и нижняя часть робота 10. Более того, их можно установить в середину, наверх или вниз по высоте корпуса робота 10.
[00079] Как показано на фиг.1, корпус робота 10 снабжен устройством для получения первого изображения 20 и устройством для получения второго изображения 30. Устройство для получения первого изображения 20 включает в себя первый линейный лазерный блок 21, второй линейный лазерный блок 22 и камеру линейного лазера 23, первый линейный лазерный блок 21 и второй линейный лазерный блок 22 находятся по обеим сторонам камеры линейного лазера 23 и используются для передачи светового пучка лазера с линейной проекцией. Устройство для получения второго изображения 30 включает в себя идентификационную камеру 31 и лампу подсветки 32. Камера линейного лазера 23 получает первое изображение, идентификационная камера 31 получает второе изображение. При этом камера линейного лазера 23 является примером первого датчика; в других вариантах реализации первый датчик также может быть другим датчиком, который может взаимодействовать с блоком линейного лазера и захватывать изображения линейного лазера; в данном изобретении здесь нет ограничений. Аналогично, идентификационная камера 31 является примером второго датчика, в других вариантах реализации второй датчик также может быть другим датчиком, который может получать изображения в видимом свете или взаимодействовать с лампой подсветки для получения изображения в видимом свете, в данном изобретении в этом нет ограничений.
[00080] Далее принцип работы устройства для получения первого изображения будет описан со ссылкой на фиг.2А и 2В; например, первый линейный лазерный блок 21 и второй линейный лазерный блок 22 используются для излучения светового пучка лазера с линейной проекцией, например, первый линейный лазерный блок 21 и второй линейный лазерный блок 22 проецируют вовне плоскость; после проецирования плоскости на целевой объект на поверхности целевого объекта формируется световой пучок лазера, с помощью которого распознается изображение окружающей среды. Показанные на фиг.2А плоскость ABF и плоскость CDE представляют собой плоскости первого линейного лазерного блока 21 и второго линейного лазерного блока 22, а показанные на фиг.2А отрезки линии АВ и CD представляют линейный лазер. Например, первый линейный лазерный блок 21 и второй линейный лазерный блок 22 может быть лазерной трубкой, понятно, что первый линейный лазерный блок 21 и второй линейный лазерный блок 22 также могут иметь другую конструкцию, соответствующую требованиям, в данном изобретении нет конкретных ограничений в этом отношении. Понятно, что первый линейный лазерный блок 21 и второй линейный лазерный блок 22 включают в себя точечный источник лазерного излучения и линзу, например, в направлении передачи источника лазерного излучения (например, вперед) может быть установлена изогнутая линза, например, вогнутой формы; например, если вогнутая линза расположена перед лазерной трубкой, лазерная трубка будет излучать пучок света на определенной длине волны (например, инфракрасный свет); после прохождения через вогнутую линзу пучок становится рассеянным светом, образуя тем самым прямую линию в плоскости вертикального оптического пути.
[00081] Как показано на фиг.2А и 2В, первый линейный лазерный блок 21 и второй линейный лазерный блок 22 расположены по обе стороны камеры 23 линейного лазера; камера 23 линейного лазера взаимодействует с первым блоком линейного лазера 21 и вторым блоком линейного лазера 22, то есть первое изображение, полученное камерой 23 линейного лазера, включает в себя информацию об отраженном пучке света линейного лазера, излучаемом первым блоком линейного лазера 21 и вторым блоком линейного лазера 22 и отраженном целевым объектом; по первому изображению самоходное устройство может измерить расстояние между целевым объектом и корпусом робота 10, или между камерами 23 линейного лазера, а затем выполнить соответствующие действия по обходу препятствий. В данном варианте реализации на фиг.2А показана схема принципа работы передатчика линейного лазера, где буква Р обозначает камеру 23 линейного лазера, а буквы Е и F обозначают второй блок линейного лазера 22 и первый блок линейного лазера 21, расположенные по обеим сторонам камеры линейного лазера 23; прямые линии РМ и PN представляют две границы горизонтального поля обзора камеры 23 линейного лазера, то есть Z.MPN обозначает горизонтальный угол обзора камеры 23 линейного лазера. Первый линейный лазерный блок 21 и второй линейный лазерный блок 22 излучают вовне плоскость FAB и плоскость ECD; после проецирования плоскости на целевой объект на его поверхности формируются линейные лазерные изображения, т.е. отрезок АВ и отрезок CD, показанные на фиг.2А. Поскольку отрезок линии АВ линейного лазера и отрезок линии CD, излучаемые передатчиком линейного лазерного пучка, расположены в поле обзора камеры 23 линейного лазера, линейные лазерные пучки могут помочь обнаружить контур, высоту и/или ширину объектов и другую информацию в пределах поля обзора камеры 23 линейного лазера, и первое устройство камеры может собирать изображение окружающей среды, обнаруженное с помощью линейных лазерных пучков.
[00082] Кроме того, на основе первого изображения, полученного камерой 23 линейного лазера, система управления может рассчитать расстояние между корпусом робота 10, где расположена камера 23 линейного лазера, и целевым объектом впереди; например, расстояние между камерой 23 линейного лазера или корпусом робота 10 и целевым объектом впереди можно рассчитать с использованием метода триангуляции для расчета расстояния. Например, на фиг.2 В показано схематическое изображение варианта реализации, представленного на фиг.2А, с одного угла обзора. Здесь буква Р обозначает камеру 23 линейного лазера, буквы Е и F обозначают второй линейный лазерный блок 22 и первый линейный лазерный блок 21, расположенные с обеих сторон камеры 23 линейного лазера; точка А обозначает проекцию отрезка линии АВ на горизонтальную плоскость, а точка D обозначает проекцию отрезка линии CD на горизонтальную плоскость, Z.MPN обозначает угол обзора камеры 23 линейного лазера по горизонтали, точка О обозначает точку пересечения светового пучка линейного лазера, излучаемого первым линейным лазерным блоком 21 и вторым линейным лазерным блоком 22, с оптической осью камеры 23 линейного лазера. Если взять в качестве примера передатчик линейного лазера F, то когда первый блок 21 линейного лазера и камера 23 линейного лазера неподвижно установлены на корпусе робота 10, фокусное расстояние камеры 23 линейного лазера известно, угол излучения передатчика линейного лазера F известен, то есть угол между прямой FA и оптической осью РО известен, расстояние между отрезками линии ОР известно; расстояние по вертикали между центрами передатчика линейного лазера F и камеры линейного лазера 23 в горизонтальной плоскости известно, изображение окружающей среды, отраженное точкой А целевого объекта, полученное камерой 23 линейного лазера, определяется как точка А', поскольку точка А' будет иметь определенное смещение относительно прямой линии РО оптической оси камеры 23 линейного лазера, и это смещение уже известно, согласно принципу подобия треугольников и с учетом уже известных выше условий можно измерить вертикальное расстояние между А и F, то есть можно получить расстояние между целевым объектом и первым линейным лазерным блоком 21.
[00083] Приведенный выше алгоритм расчета является лишь иллюстративным, в других вариантах реализации можно использовать фокусное расстояние камеры и проекцию точки А на плоскость формирования изображения камеры для выполнения триангуляции, в настоящем изобретении здесь нет ограничений. Расстояние между камерой 23 линейного лазера или корпусом робота 10 и целевым объектом впереди также можно рассчитать на основе метода времени пролета (TOF).
[00084] Понятно, что характеристики деформации линейного отрезка, отраженного целевым объектом, полученные первым датчиком, также можно использовать для определения положения находящего спереди целевого объекта, чтобы определить конкретные функциональные действия, например обход препятствий или продолжение уборки.
[00085] Второй датчик используется для получения изображений окружающей среды; второй датчик соединяется с системой управления самоходного устройства; система управления может управлять экспозицией второго датчика; второй датчик получает второе изображение по команде управления экспозицией от системы управления, система управления анализирует и обрабатывает второе изображение, чтобы определить тип целевого объекта.
[00086] В настоящем варианте реализации камера 23 линейного лазера, первый линейный лазерный блок 21 и второй линейный лазерный блок 22 работают вместе, изображения, полученные камерой 23 линейного лазера, используются для определения расстояния до целевого объекта, а изображения, полученные идентификационной камерой 31, используются для идентификации типа целевого объекта. Следовательно, на основе изображения окружающей среды, полученного идентификационной камерой 31, можно определить тип целевого объекта, а по типу целевого объекта можно определить необходимость обхода препятствий роботом 10; если роботу 10 необходимо обойти препятствие, камера 23 линейного лазера, первый линейный лазерный блок 21 и второй линейный лазерный блок 22 взаимодействуют друг с другом с целью определить расстояние до целевого объекта для выполнения соответствующих действий по обходу препятствия; если роботу 10 не требуется обходить препятствие, он может просто продолжить уборку, уменьшая ненужные действия самоходного устройства по обходу препятствий, что повышает точность автоматического обхода препятствий самоходным устройством.
[00087] В качестве примера, вторых изображений может быть много, например 500, 1000 или другое соответствующее требования количество; например, количество вторых изображений можно определить путем регулировки частоты экспозиции идентификационной камеры 31.
[00088] В некоторых вариантах реализации камера 23 линейного лазера является инфракрасным датчиком, а перед инфракрасной камерой установлен инфракрасный светофильтр, который пропускает только инфракрасный свет, например, только инфракрасный свет на длине волны 808 нм, первый линейный лазерный блок 21 и второй линейный лазерный блок 22, работающие вместе с камерой 23 линейного лазера, представляют собой инфракрасные лазерные трубки, которые излучают инфракрасный свет. Идентификационная камера 31 представляет собой камеру RGB, перед которой установлен светофильтр видимого света, который пропускает только видимый свет. Понятно, что камера 23 линейного лазера и идентификационная камера 31 могут иметь и другую соответствующую требованиям конструкцию, в данном изобретении в этом нет ограничений.
[00089] В некоторых вариантах реализации, с одной стороны, камера 23 линейного лазера и идентификационная камера 31 установлены рядом в горизонтальном направлении, то есть первое устройство камеры и идентификационная камера 31 установлены слева направо, например, камера 23 линейного лазера располагается слева от идентификационной камеры 31, или камера 23 линейного лазера может располагаться справа от идентификационной камеры 31. Понятно, что в данном случае первый линейный лазерный блок 21 и второй линейный лазерный блок 22 располагаются по обеим сторонам камеры 23 линейного лазера и идентификационной камеры 31, то есть камера 23 линейного лазера и идентификационная камера 31 располагаются между первый линейным лазерным блоком 21 и вторым линейным лазерным блоком 22 с обеих сторон.
[00090] С другой стороны, камера 23 линейного лазера и идентификационная камера 31 расположены рядом друг с другом в вертикальном направлении, то есть первое устройство камеры и идентификационная камера 31 расположены сверху вниз, например, камера 23 линейного лазера расположена над идентификационной камерой 31, или камера 23 линейного лазера расположена под идентификационной камерой 31. Понятно, что в данном случае первый линейный лазерный блок 21 и второй линейный лазерный блок 22 расположены по обеим сторонам камеры 23 линейного лазера и идентификационной камеры 31, то есть камера 23 линейного лазера и идентификационная камера 31 находятся между первый линейным лазерным блоком 21 и вторым линейным лазерным блоком 22 по обеим сторонам.
[00091] Например, в направлении проецирования самоходного устройства (например, вид сверху) линия соединения ОР точки пересечения О световых пучков, излучаемых первым линейным лазерным блоком 21 и вторым линейным лазерным блоком 22, с первым датчиком Р, параллельна направлению движения самоходного устройства вперед, поэтому камера 23 линейного лазера в качестве первого датчика всегда может быть направлена вперед, без необходимости регулировать положение первого датчика влево и вправо, благодаря чему световой пучок первого линейного лазерного блока 21 и/или второго линейного лазерного блока 22 можно обнаруживать в пределах максимального диапазона, что увеличивает надежность самоходного устройства в части обнаружения целевых объектов.
[00092] В некоторых вариантах реализации самоходное устройство также включает в себя лампу подсветки 32, когда идентификационная камера 31 производит съемку, лампа подсветки 32 используется для получения дополнительного света, необходимого для нормальной съемки идентификационной камерой 31, благодаря чему идентификационная камера 31 может получать четкие и точные снимки окружающей среды и повысить точность распознавания целевых объектов.
[00093] В некоторых вариантах реализации самоходное устройство может также одновременно включать в себя лампу подсветки 32 и датчик освещенности окружающей среды, который используется для определения яркости окружающего света, так что если света недостаточно, и идентификационная камера 31 не может получить четкое и точное изображение окружающей среды, то есть когда освещение окружающей среды не отвечает требованиям экспозиции идентификационной камеры 31, для получения дополнительного света используется лампа подсветки 32, которая обеспечивает условия, необходимые для работы идентификационной камеры 31, чтобы она могла получать четкие и точные изображение окружающей среды, что также повышает точность распознавания целевых объектов.
[00094] Кроме того, система управления самоходным устройством соединяется с лампой подсветки 32 и датчиком освещенности окружающей среды и управляет рабочим состоянием лампы подсветки 32 в соответствии с сигналом, полученным от датчика освещенности окружающей среды, чтобы обеспечивать дополнительный свет, необходимый для работы идентификационной камеры 31. Например, когда датчик освещенности среды обнаруживает, что света недостаточно, освещенность не отвечает требованиям экспозиции идентификационной камеры 31, или если полученное второе изображение от идентификационной камеры 31 не позволяет точно и четко определить тип целевого объекта, например, когда самоходное устройство убирает пол и попадает в относительно темное место, например, под кроватью, датчик освещенности окружающей среды посылает сигнал в систему управления, которая по этому сигналу включает лампу подсветки 32 для увеличения освещения таким образом, чтобы после включения подсветки света было достаточно для нормальной работы идентификационной камеры 31, и по второму относительно четкому изображению, полученному от идентификационной камеры 31, устройство четко и быстро определяет тип целевого объекта. Понятно, что когда датчик освещенности окружающей среды обнаруживает, что света достаточно для нормальной работы идентификационной камеры 31, датчик освещенности посылает сигнал в систему управления, которая в соответствии с полученным сигналом выключает лампу подсветки 32, тем самым экономя энергию.
[00095] В других вариантах реализации определение яркости освещения окружающей среды также возможно без дополнительной установки датчиков освещенности, например, яркость окружающего света можно определить на основе полученного второго изображения, в этом случае не требуется дополнительный датчик освещенности окружающей среды, уровень освещенности можно определить просто на основе информации, полученной на изображении, и на основе уровня освещения окружающей среды можно включать и выключать лампу подсветки.
[00096] Например, целевой объект можно идентифицировать по второму изображению. Для изображения целевого объекта, полученного с использованием лампы подсветки 32, с помощью машинного обучения и других нейронных сетей можно сравнивать вектор признаков изображения целевого объекта с вектором признаков изображения в словаре данных для определения степени похожести между ними.
[00097] В некоторых вариантах реализации при получении первого изображения линейный лазерный передатчик (по меньшей мере, либо первый линейный блок 21, либо второй линейный лазерный блок 22) излучает пучок света на первой заданной длине волны. При получении второго изображения лампа подсветки 32 излучает свет на второй заданной длине волны. Первая заданная длина волны и вторая заданная длина волны могут как совпадать, так и не совпадать.
[00098] В некоторых вариантах реализации первый линейный лазер и второй линейный лазер могут излучать попеременно. При этом, из-за разного времени работы первого линейного лазерного блока 21 и второго линейного лазерного блока 22 пучки света, излучаемые первым линейным лазером и вторым линейным лазером при поочередном включении, не будут накладываться друг на друга. Например, первый линейный лазерный блок 21 и второй линейный лазер 22 можно включать попеременно в определенной последовательности.
[00099] В некоторых вариантах реализации камера линейного лазера 23 позволяет получить фоновое изображение, при получении которого излучение лазера на первой заданной длине волны прекращается; если пиксели первого изображения и фонового изображения в каждом одинаковом положении различаются, получается скорректированное лазерное изображение; по второму изображению, полученному от устройства для получения первого изображения 20 в разные моменты времени, получается следующее скорректированное лазерное изображение, с учетом положения самоходного устройства в момент сбора получается облако точек; при этом на основе каждого скорректированного лазерного изображения и с учетом положения самоходного устройства во время получения изображения получают расстояние между целевым объектом и устройством для получения первого изображения 20. Получение фоновых изображений может использоваться для удаления фонового шума и дальнейшего уменьшения воздействия искусственного освещения и яркого света.
[000100] Самоходное устройство также включает в себя модуль получения изображения, модуль определения расстояния, модуль распознавания цели и модуль управления. Модуль получения изображения используется для получения первого и второго изображения и фонового изображения устройством 20 для получения первого изображения и устройством 30 для получения второго изображения; модуль измерения расстояния используется для получения расстояния между целевым объектом и устройством для получения изображения по первому изображению; модуль распознавания цели используется для распознавания целевого объекта по второму изображению; модуль управления используется для управления работой самоходного устройства в соответствии с полученным результатом распознавания от модуля распознавания цели. При этом модуль управления является частью системы управления.
[000101] Результат распознавания включает в себя определенный тип целевого объекта или информацию о том, что тип целевого объекта не удалось определить.
[000102] В некоторых вариантах реализации, когда модуль управления распознает, что идентифицированный тип совпадает с заранее заданным типом, самоходное устройство выполняет в отношении целевого объекта обход препятствий.
[000103] В некоторых вариантах реализации, когда модуль управления распознает, что идентифицированный тип совпадает с заранее заданным типом, самоходное устройство не выполняет в отношении целевого объекта обход препятствий.
[000104] В некоторых вариантах реализации модуль управления не может определить тип целевого объекта, и если он определяет, что фактический размер больше заранее заданного, самоходное устройство выполняет обход препятствия.
[000105] В некоторых вариантах реализации модуль управления не может определить тип целевого объекта, и когда он определяет, что фактический размер меньше заранее заданного, самоходное устройство не выполняет обход препятствия.
[000106] Ниже приводится подробное описание алгоритма обхода препятствий самоходным устройством со ссылкой на фиг.3, фиг.4A-4D и фиг.5; как показано на фиг.3, на этапе S301 самоходное устройство использует облако точек целевого объекта, полученное на основе инфракрасного света от устройства для получения первого изображения; на этапе S302 устройство для получения второго изображения используется для определения типа целевого объекта на основе видимого света, после чего тип целевого объекта сравнивается с данными в словаре для получения результата подтверждения; на этапе S3031, если тип целевого объекта соответствует данным в словаре и находится в черном списке в словаре, выполняется этап S305, и самоходное устройство применяет алгоритм обхода препятствий (в процессе обхода препятствий используется облако точек, например, можно получить угол и форму препятствия для точного обхода препятствия, что можно описать на примере приведенного ниже варианта реализации), на этапе S3032, когда тип целевого объекта совпадает с данными в словаре и находится в белом списке, выполняется этап S306, когда самоходное устройство применяет установленный алгоритм обхода препятствия.
[000107] Если на этапе S302 видимый свет не позволяет получить результат подтверждения, и тип целевого объекта идентифицировать невозможно (то есть если целевой объект слишком расплывчат), если на этапе S304 идентифицированный целевой объект относительно большой, выполняется этап S307, на самоходном устройстве можно запускать алгоритм обхода препятствия, например, снижение скорости движения при приближении к целевому объекту, чтобы не столкнуться с ним; если на этапе S304 идентифицированный целевой объект относительно небольшой, выполняется этап S308, и самоходное устройство может применять алгоритм обхода препятствий, например, снижение скорости вращения боковых щеток при приближении к препятствию, чтобы предотвратить отлетание целевого объекта.
[000108] Один из вариантов реализации настоящего изобретения обеспечивает способ управления самоходным устройством, как показано на фиг.4А, в том числе:
[000109] на этапе S401 передающий компонент устройства для получения первого изображения передает инфракрасный сигнал;
[000110] на этапе S402 первый датчик устройства для получения первого изображения принимает первое изображение, сформированное после отражения инфракрасного сигнала целевым объектом;
[000111] на этапе S403 второй датчик устройства для получения второго изображения принимает изображение целевого объекта в видимом свете и формирует второе изображение.
[000112] На этапе S404 по первому изображению определяется расстояние до целевого объекта;
[000113] на этапе S405 по второму изображению определяется тип целевого объекта;
[000114] на этапе S406 управление действиями самоходного устройства осуществляется, как минимум, либо на основе данных о расстоянии, либо на основе данных о типе.
[000115] Способ управления самоходным устройством в одном из вариантов реализации заключается в том, что устройство для получения первого изображения 20 получает инфракрасный сигнал и формирует первое изображение, устройство для получения второго изображения 30 получает сигнал видимого света и формирует второе изображение, на основе первого изображения и второго изображения определяется расстояние и тип соответственно, и на основе как минимум либо расстояния, либо типа осуществляется управление самоходным устройством, что повышает его эксплуатационные возможности и позволяет избежать таких проблем, как пропуск места уборки или столкновение с целевым объектом.
[000116] Следует отметить, что устройство для получения первого изображения 20 и устройство для получения второго изображения 30 получают по отдельности первое изображение и второе изображение, то есть устройство для получения первого изображения 20 и устройство для получения второго изображения 30 получают изображения независимо друг от друга, что повышает частоту получения изображений и возможности реагирования самоходного устройства.
[000117] На этапе S401 передающий компонент первого устройства для получения изображений 20 включает в себя, по меньшей мере, один линейный лазер, при этом первое изображение захватывается первым датчиком и содержит информацию о пучке света линейного лазера, отраженном от целевого объекта. Использование линейных лазеров повышает дальность обнаружения целевых объектов, а также позволяет измерить высоту высоких целевых объектов, чтобы получить полную картину целевого объекта и точные данные о дальности.
[000118] Например, он также может включать в себя два линейных лазера, причем первый линейный лазерный блок 21 излучает первый световой пучок; камера 23 линейного лазера захватывает первое лазерное изображение, включающее в себя оптический сигнал первого лазера, отраженный целевым объектом; второй линейный лазерный блок 22 излучает второй световой пучок; камера 23 линейного лазера захватывает второе лазерное изображение, включающее оптический сигнал второго линейного лазера, отраженный целевым объектом. Первый линейный лазерный блок 21 и второй линейный лазерный блок 22 излучают световые пучки под разными углами, то есть камера 23 линейного лазера получает информацию о целевом объекте под разными углами, дополняя собранные данные и повышая их точность.
[000119] В некоторых вариантах реализации, как показано на фиг.4 В, устройство для получения первого изображения 20 может работать в следующей последовательности: на этапе S11 включается только первый лазерный блок 21, камера 23 линейного лазера получает изображение первого линейного лазера; на этапе S12 включается только второй линейный лазерный блок 22, камера 23 линейного лазера получает изображение второго линейного лазера.
[000120] В некоторых вариантах реализации, как показано на фиг.4С, устройство для получения первого изображения 20 может работать в следующей последовательности: на этапе S21 сначала включается только второй линейный лазерный блок 22, камера 23 линейного лазера получает изображение второго линейного лазера; на этапе S22 включается только первый линейный лазерный блок 21, камера 23 линейного лазера получает изображение первого линейного лазера.
[000121] На фиг.4 В и 4С показана ситуация, когда первый линейный лазерный блок 21 и второй линейный лазерный блок 22 излучают попеременно; в других вариантах реализации первый линейный лазерный блок 21 и второй линейный лазерный блок 22 могут излучать одновременно; камера 23 линейного лазера делает снимок, который позволяет сразу получить с помощью первого линейного лазерного блока 21 и второго линейного лазерного блока 22 оптические данные, отраженные целевым объектом.
[000122] В одном из вариантов реализации способ управления самоходным устройством также включает в себя камеру 23 линейного лазера, которая получает фоновое изображение, не содержащее пучок света первого линейного лазера и второго линейного лазера, отраженный целевым объектом. Например, как показано на фиг.4D, на этапе S33, когда все линейные лазеры выключены, камера 23 линейного лазера собирает фоновые изображения. При этом фоновые изображения могут использоваться для расчетов с изображениями, полученными первым линейным лазером и вторым линейным лазером на этапах S11 и S12, для удаления фонового шума. При этом фоновые изображения также могут использоваться для расчетов с изображениями, полученными вторым линейным лазером и первым линейным лазером на этапах S21 и S22, для удаления фонового шума. Например, разница между пикселями в изображении первого линейного лазера и пикселями в соответствующем положении на фоновом изображении позволяет получить скорректированное лазерное изображение, а затем на его основе получить расстояние между целевым объектом и устройством камеры, что повышает точность измерения.
[000123] В некоторых вариантах реализации этап S3] может выполняться между этапами S11 и S12, до этапа S11 или после этапа S12.
[000124] Аналогично, этап S33 может выполняться между этапами S21 и S22, до этапа S21 или после этапа S22; например, до или после того, как первый линейный лазерный блок 21 и второй линейный лазерный блок 22 включаются одновременно для получения первого изображения линейного лазера, первый линейный лазерный блок 21 или второй линейный лазерный блок 22 можно держать выключенными для получения фонового изображения, чтобы использовать его с изображением первого линейного лазера для проведения расчетов с целью удаления фонового шума.
[000125] В одном варианте реализации устройство для получения второго изображения 30 включает в себя второй датчик, например, второй датчик по меньшей мере может представлять собой одну идентификационную камеру 31, изображение целевого объекта в видимом свете, полученное по меньшей мере одной идентификационной камерой 31, позволяет сформировать второе изображение, включает в себя данные сигнала видимого света, отраженного от целевого объекта. Настройка идентификационной камеры 31 позволяет отдельно получить второе изображение, при этом устройство для получения первого изображения и устройство для получения второго изображения могут работать одновременно, тем самым увеличивая частоту получения изображений. Более того, поскольку изображение в видимом свете может содержать информацию о цвете, это позволяет получить более подробную информацию о целевом объекте, а распознавание второго изображения, сформированного изображением в видимом свете, повышает эффективность распознавания.
[000126] В одном из вариантов реализации, когда самоходное устройство перемещается в более темное место, качество второго изображения, полученного в это время, снижается, поэтому на устройстве для получения второго изображения 30 также может быть установлена лампа подсветки 32, по меньшей мере часть видимого света, излучаемого лампой подсветки 32, отражается от целевого объекта и попадает в идентификационную камеру 31. Установка лампы подсветки 32 улучшает освещенность окружающей среды, тем самым улучшая качество второго изображения, полученного идентификационной камерой 31, и улучшая эффективность распознавания второго изображения.
[000127] В одном из вариантов реализации лампа подсветки 32 включается или выключается в зависимости от освещенности окружающей среды. Включение и выключение лампы подсветки в зависимости от разного уровня освещенности окружающей среды повышает качество получения второго изображения, тем самым повышая точность распознавания.
[000128] В одном из вариантов реализации можно установить датчик освещенности для определения уровня освещенности окружающей среды; датчик измеряет яркость окружающего света, в зависимости от чего включается или выключается лампа подсветки.
[000129] В одном из вариантов реализации первое изображение используется для определения информации о наблюдаемых трехмерных координатах целевого объекта относительно устройства 20 для получения первого изображения; и на основе этой информации о наблюдаемых трехмерных координатах определяются трехмерные координаты целевого объекта относительно земли.
[000130] При этом началом координат для наблюдаемых трехмерных координат может быть оптический центр устройства для получения первого изображения 20, а началом системы координат с отсчетом относительно земли может быть основание робота или конец приводного механизма, а приводным механизмом может быть уборочная система. Однако, что касается установки наблюдаемых трехмерных координат и трехмерных координат с отсчетом относительно земли, настоящее изобретение этим не ограничено.
[000131] Например, если самоходное устройство находится в координате А, измеряется расстояние излучения линейного лазера до целевого объекта, рассчитываются трехмерные координаты SLAM этих точек; когда самоходное устройство переместится или повернется в координату В, если в это время линейный лазер будет по-прежнему излучать световой пучок на целевой объект, также будет выполняться измерение расстояния и можно рассчитать трехмерные координаты SLAM других точек на целевом объекте. Путем непрерывного перемещения самоходного устройства облако точек целевого объекта может быть восстановлено. Это облако точек в основном отражает конкретный размер, форму и положение целевого объекта, поэтому может быть достигнута большая точность при составлении правил обхода препятствий, что обеспечивает точность обхода препятствий самоходным устройством.
[000132] Как вариант, координаты SLAM можно рассчитать с помощью монокулярного дальномера, с учетом приведенной выше информации об облаке точек от линейного лазера, тем самым можно восстановить облако точек целевого объекта и обеспечить более точный обход препятствий; данные облака точек создают трехмерную модель целевого объекта, а по сути, позволяют более точно получить конкретный размер, форму и положение целевого объекта.
[000133] В одном из вариантов реализации информация об ориентации целевого объекта позволяет получить данные о контуре и занятой площади препятствия. Например, в заданном пространстве окружающей среды может быть задан внешний контур объекта, который можно рассматривать как информацию об ориентации целевого объекта; например, если целевой объект представляет собой квадратное мусорное ведро, то после самостоятельной установки направлений востока, запада, юга и севера в пространстве окружения можно определить, в какую больше сторону направлен целевой объект.
[000134] В одном варианте реализации на основе второго изображения определяется тип целевого объекта, включая использование нейронной сети для распознавания второго изображения с целью определения типа целевого объекта.
[000135] В одном варианте реализации, по меньшей мере, на основе либо расстояния, либо типа, осуществляется управление самоходным устройством, в том числе: на основе информации о типе устанавливается соответствие между целевым объектом и данными в словаре для получения результатов подтверждения; на основе расстояния определяется ориентация целевого объекта; на основе результата подтверждения и/или ориентации целевого объекта контролируется применение самоходным устройством алгоритма движения.
[000136] Для подробного описания алгоритма обхода препятствий самоходным устройством см. фиг.3, на основе второго изображения, полученного самоходным устройством, определяется тип, а если определяется, что тип совпадает с заранее заданным типом (т.е. с данными словаря), необходимо учитывать, относится ли данный тип к черному списку или белому списку; самоходное устройство применяет обход препятствий к целевому объекту (то есть алгоритм движения представляет собой различные алгоритмы обхода препятствий), то есть, если полученная информация о типе целевого объекта соответствует заранее заданной информации о типе, это указывает на то, что самоходное устройство должно применять алгоритм обхода препятствий к целевому объекту, что повышает способности самоходного устройства обходить препятствия.
[000137] Понятно, что предустановленный тип принадлежит к определенной группе типов, которая может включать в себя несколько типов, например, группа типов может включать, как минимум, тапочки, текстиль (носки), испражнения, кабель для передачи данных, подставку и стулья.
[000138] Например, на основе типа, определенного по второму изображению, после определения соответствия между целевым объектом и данными в словаре устанавливается, что целевой объект совпадает с данными в словаре; предположим, что целевой объект, распознанный перед самоходным устройством, является кабелем передачи данных, и если при этом этот кабель данных находится в черном списке, он будет принадлежать объектам, которые самоходное устройство должно обходить, затем необходимо использовать облако точек целевого объекта, полученное устройством для получения первого изображения с целью определить положение, угол, направление кабеля передачи данных и другую точную информацию, и когда самоходное устройство будет приближаться к кабелю передачи данных, оно сможет точно его обойти, в результате оно не запутается в кабеле передачи данных и не прекратит движение, но при этом уберет максимально обширную площадь поверхности вокруг этого кабеля.
[000139] Вышеупомянутый алгоритм обхода кабеля передачи данных может включать в себя не только траекторию движения, когда самоходное устройство обходит препятствие, но и управление скоростью самоходного устройства после того, как оно обнаружит, что целевой объект является кабелем передачи данных, например, после обнаружения кабеля передачи данных считывается расстояние от самоходного устройства до кабеля передачи данных, и если это расстояние превышает первое заданное значение, текущая скорость движения сохраняется, если расстояние меньше или равно первому заданному значению, самоходное устройство снижает скорость и продолжает движение до тех пор, пока расстояние не станет меньше или равно второму заданному значению, после чего начинается выполнение обхода. При этом расстояние между самоходным устройством и кабелем передачи данных получают с помощью устройства для получения первого изображения, способ такого получения уже описан ранее и здесь повторяться не будет.
[000140] Например, траектория движения самоходного устройства с обходом препятствия может включать в себя следующее: точно повторяя форму целевого объекта, например, кабеля передачи данных, сохраняется постоянное значение расстояния от края самоходного устройства до каждой точки кабеля передачи данных или определяется соединение между двумя конечными точками в направлении укладки кабеля передачи данных с сохранением фиксированного расстояния соединения вдоль направления, параллельного линии соединения и пр.
[000141] Выше на примере кабеля передачи данных был описан алгоритм обхода препятствий самоходным устройством; в других вариантах реализации, например, если перед самоходным устройством идентифицирован такой целевой объект, как испражнение, и если это испражнение находится в черном списке, оно относится к объектам, которые самоходное устройство должно обходить, но надо учитывать характеристики такого объекта, например, возможности загрязнения или удара, которые могут привести к тому, что самоходное устройство размажет эту грязь по всему помещению, что значительно ухудшит восприятие пользователем, поэтому при учете алгоритма обхода данного целевого объекта самоходным устройством необходимо принимать во внимание облако точек целевого объекта, полученное первым устройством для получения изображений; такое облако точек позволяет получить точную информацию о таких испражнениях, например, их положение и угол наклона и пр., обеспечивая быстрый и точных обход таких препятствий.
[000142] Для таких специфических целевых объектов, как испражнения, можно выбрать первое заданное значение побольше, чтобы устройство при обходе заранее снижало скорость, а если увеличить второе заданное значение, между самоходным устройством и испражнением будет оставаться достаточное расстояние, и при движении вперед самоходное устройство не будет никак контактировать с таким целевым объектом.
[000143] Выше на примере приводится описание алгоритма обхода препятствия самоходным устройством, когда целевой объект находится в черном списке в данных словаря; ниже на фиг.3 показан алгоритм обхода препятствия самоходным устройством, когда целевой объект находится в белом списке в данных словаря.
[000144] Например, в белом списке могут находиться такие целевые объекты, как конфетти, кофейные зерна, крупинки риса и т.д., в белый список вносятся объекты, которые не требуется обходить, поэтому, если результат подтверждения находится в словаре, например, конфетти, самоходное устройство продолжает движение в соответствии с установленным алгоритмом обхода препятствий. В одном из вариантов реализации самоходное устройство продолжает движение вперед на основе информации, полученной от других датчиков (кроме расстояния и типа), например, датчика бампера и датчика распознавания обрыва. Это обеспечивает очистку целевого объекта самоходным устройством, чистоту убираемой поверхности и предотвращает пропуск области во время уборки.
[000145] Если в белый список включены все целевые объекты, которые не нужно обходить, то как только будет определено, что объект не относится к белому списку, например, результатом подтверждения являются тапочки, которые не относятся к белому списку, то самоходное устройство обойдет этот целевой объект, и для процесса такого обхода необходимо использовать облако точек целевого объекта, алгоритм обхода препятствий самоходным устройством описан выше и повторяться не будет.
[000146] Выше на примерах приводится описание алгоритма обхода препятствий самоходным устройством, когда целевой объект относится к черному списку или белому списку в словаре. Далее описывается ситуация, показанная на фиг.3 и фиг.5, когда информация о типе целевого объекта не получена.
[000147] В одном из вариантов реализации на основе как минимум либо результата подтверждения, либо расстояния самоходное устройство применяет к целевому объекту алгоритм обхода препятствия: если результат подтверждения не содержит тип целевого объекта, самоходное устройство применяет к целевому объекту алгоритм обхода препятствия на основе информации о расстоянии. То есть, когда тип целевого объекта распознать невозможно, алгоритм обхода препятствий определяется на основе полученной информации о расстоянии, благодаря чему при встрече самоходного устройства с целевым объектом любого типа оно сможет быстро и точно определить алгоритм обхода препятствий.
[000148] Кроме того, когда применяется алгоритм обхода препятствий на основе информации о расстоянии, снижается скорость движения самоходного устройства или скорость вращения узла боковых щеток, что предотвращает случайное столкновение с целевым объектом и обеспечивает безопасный обход препятствий.
[000149] Аналогично способу, описанному выше, способ управления включает в себя этап S501 и этап S503, где
[000150] на этапе S501 устройство получает информацию о расстоянии и типе целевого объекта;
[000151] на этапе S503 на основе информации о типе определяется результат подтверждения типа целевого объекта;
[000152] Если результат подтверждения не возвращается или не содержит тип целевого объекта, для применения алгоритма обхода применяется информация о расстоянии.
[000153] Если в варианте реализации настоящего изобретения для управления самоходным устройством используется полученная информации о расстоянии и типе целевого объекта, и тип целевого объекта определить не удается, самоходное устройство не может распознать, какой целевой объект находится перед ним, применяется алгоритм обхода на основе информации о расстоянии, в результате чего даже если второе устройство для получения изображений не сможет распознать тип целевого объекта, алгоритм обхода препятствия все равно сможет быть выполнен, что повышает способность самоходного устройства обходить препятствия.
[000154] Следует отметить, что на этапе S501 информация о расстоянии между целевым объектом и устройством для получения изображения на самоходном устройстве определяется на основе первого изображения, а информация о типе целевого объекта определяется на основе второго изображения, а первое изображение и второе изображение соответственно получают через устройство для получения первого изображения 20 и устройство для получения второго изображения 30. Способ получения первого изображения и второго изображения и связанные с этим способы управления здесь повторяться не будут, можно обратиться к приведенному выше варианту реализации.
[000155] В одном из вариантов реализации на этапе S503 самоходное устройство применяет к целевому объекту алгоритм обхода препятствий на основе данных о расстоянии, в том числе на основе информации о расстоянии определяется соответствие между размером целевого объекта и предварительно заданным размером объекта; на основе этого соответствия самоходное устройство применяет к целевому объекту алгоритм обхода препятствий. То есть, когда невозможно определить тип целевого объекта, алгоритм обхода препятствий должен применяться в соответствии с определенным размером целевого объекта.
[000156] Если на этапе S503 размер целевого объекта больше заданного размера объекта, применяется алгоритм обхода целевого объекта самоходным устройством. Если размер целевого объекта не превышает заданного размера объекта, то самоходное устройство применяет алгоритм осторожного обхода препятствий, снижая скорость вращения боковых щеток при приближении к целевому объекту, чтобы целевой объект не отлетел под воздействием щеток.
[000157] Например, размер целевого объекта может включать в себя высоту, длину и/или ширину. Например, алгоритм обхода препятствий может определяться на основе чего-то одного: высоты, длины или ширины.
[000158] Например, если алгоритм обхода препятствий определяется только по высоте целевого объекта, и высота целевого объекта больше, чем может преодолеть самоходное устройство, можно определить алгоритм, при котором самоходное устройство обойдет препятствие. Аналогичным образом, алгоритм обхода препятствий также можно определять на основе длины или ширины целевого объекта; при большой длине или ширине целевого объекта самоходное устройство также может его обойти, что предотвращает невозможность уборки или повреждение самоходного устройства в результате уборки. При этом, например, заданный размер объекта может иметь фиксированное значение.
[000159] Как вариант, алгоритм обхода препятствий может определяться на основе двух параметров из трех: высоты, длины и ширины, например, если заданное пороговое значение длины и ширины составляет a*bcm, и длина целевого объекта меньше порогового значения, применяется алгоритм без обхода препятствия, если размер целевого объекта больше порогового значения, применяется алгоритм с обходом препятствия.
[000160] Как вариант, алгоритм обхода препятствия может определяться с учетом высоты, длины и ширины, например, если целевой объект имеет большую высоту, но небольшую ширину и длину, чтобы самоходное устройство не опрокинуло целевой объект, двигаясь на высокой скорости, самоходное устройство может снижать скорость движения, а когда оно достигнет определенного положения, оно может отойти назад, повернуть или выполнить иные действия с целью обойти препятствие. Как вариант, если целевой объект имеет небольшую высоту, но большую ширину и длину, самоходное устройство может на высокой скорости войти в контакт с целевым объектом и перемещаться вдоль края целевого объекта, обеспечивая максимальную площадь уборки.
[000161] Если самоходное устройство применяет алгоритм обхода препятствий с обходом, устройство для получения изображений, установленное на самоходном устройстве, собирает первое изображение в разные моменты времени, и с учетом местоположения самоходного устройства в момент сбора получает облако точек целевого объекта, при этом создавая на основе облака точек правила обхода препятствий.
[000162] В одном из вариантов реализации процесс получения облака точек включает в себя следующее: по первому изображению, собранному в разные моменты времени устройством для получения изображений, установленным на самоходном устройстве, и с учетом местоположения самоходного устройства, во время сбора получают облако точек целевого объекта; облако точек кластеризуется с получением результатов кластеризации; при этом на основе результатов кластеризации определяются правила обхода препятствий.
[000163] При этом получают облако точек целевого объекта, то есть можно определить 3D-координаты для каждой из опорных точек целевого объекта. При этом контрольная точка может быть точкой на целевом объекте, по которой может быть измерено расстояние и которая может включать, без ограничений, точку на границе целевого объекта, характерные точки и пр.
[000164] Например, если координатами целевого объекта являются 3D-координаты, то 3D-координаты каждой опорной точки могут быть преобразованы в 2D-координаты. Преобразование облака точек 3D в 2D-координаты эффективно сокращает объем и повышает эффективность обработки данных. Если при кластеризации 2D-координат каждой опорной точки расстояние до координат соседней опорной точки меньше первого заданного значения, все точки считаются одной областью; размер каждой области определяется отдельно; если размер больше или равен второму заданному значению, это подтверждает, что целевой объект находится в пределах эффективного диапазона анализа, и самоходному устройству необходимо составить соответствующий алгоритм обхода препятствий, чтобы обойти соответствующий целевой объект.
[000165] Учитывая, что целевой объект может представлять собой комбинацию нескольких объектов, то есть может находиться в пределах определенной области, на первом изображении определяются размеры сразу нескольких объектов, и создаются облака точек нескольких объектов; в это время облака точек кластеризуются, и если после кластеризации размер объекта превышает заранее заданное пороговое значение, применяется алгоритм обхода с уклонением, а если размер объекта не превышает пороговое значение, применяется алгоритм осторожного обхода препятствий, выполняются обычные работы по уборке, что еще более детализирует алгоритм обхода препятствий.
[000166] При этом алгоритм обхода препятствий может включать в себя не только маршрут движения, но и другие элементы управления самоходным устройством, такие как контроль скорости, управление боковыми щетками и пр.
[000167] В одном из вариантов реализации, если размер целевого объекта больше предварительно заданного размера, при приближении самоходного устройства к целевому объекту оно снижается скорость движения, чтобы не столкнуться с целевым объектом.
[000168] Как показано на фиг.3, на этапе S302 на основе информации о типе, полученной с помощью видимого света, получают результат подтверждения, а на этапе S3031 определяется, относится ли он к черному списку, на этапе S3032 определяется, относится ли он к белому списку; в других вариантах реализации этап S302 и этап S3031 могут выполняться вместе как один этап, например, черный список в словаре может включать в себя тапочки, текстиль (носки), испражнения, кабель для передачи данных, основание и стул. Второе изображения, полученное с помощью самоходного устройства, сравнивается с каждым из объектов в черном списке, и результатом подтверждения является то, содержит ли второе изображение объекты из черного списка; предположим, что на втором изображении имеются тапочки, таким образом, на основе второго изображения, где есть тапочки, получается результат подтверждения, который показывает, что объект относится к черному списку, и продолжается выполнение этапа S305. Аналогичным образом этапы S302 и S3032 могут выполняться вместе как один этап, и если определяется, что целевой объект относится к белому списку, продолжается выполнение этапа S306.
[000169] Например, когда этап S302 и этап S3031 объединены в один этап, и результат подтверждения показывает, что целевой объект не относится к черному списку, можно выбрать выполнение этапа S306 или S304; например, если на втором изображении нет объектов из черного списка, можно выбрать выполнение этапа S306, и тогда самоходное устройство продолжит движение вперед на основе информации от других датчиков, кроме информации о расстоянии и типе, например, от датчика бампера и датчика распознавания обрыва, или можно выбрать выполнение этапа S304 для обработки объекта согласно общей логике объектов, этап S304 и последующие этапы S307 и S308 описаны выше и здесь повторяться не будут. Аналогичным образом, когда этап S302 и этап S3031 объединены в один этап, и результат подтверждения показывает, что целевой объект не относится к белому списку, можно выбрать выполнение этапа S305, например, если на втором изображении нет объектов из белого списка, можно выбрать выполнение этапа S305 для применения алгоритма обхода препятствий с учетом облака точек, этап S308 описан выше и здесь повторяться не будет.
[000170] Понятно, что хотя на фиг.3 этап S301 находится выше этапа S302, это не означает, что этап S301 обязательно должен выполняться до этапа S302, этапы S301 и S302 могут выполняться одновременно, или этап S301 может выполняться после этапа S302.
[000171] Например, если этапы S301 и S302 выполняются независимо, для них нет заранее определенного порядка.
[000172] Настоящее изобретение также обеспечивает машиночитаемый носитель информации, на котором хранится компьютерная программа, и когда данная программа выполняется процессором, реализуется вышеупомянутый способ управления самоходным устройством.
[000173] В некоторых возможных вариантах реализации различные аспекты настоящего изобретения также могут быть реализованы в форме программного продукта, который включает в себя программный код, при запуске на оконечном устройстве программный код используется для того, чтобы на оконечном устройство выполнять этапы согласно различным вариантам реализации настоящего изобретения, описанные в разделе, посвященном способам управления самоходным устройством в данном документе.
[000174] Как показано на фиг.6, программный продукт 300, используемый для реализации вышеуказанных задач согласно вариантам реализации изобретения, может храниться на портативном постоянном ЗУ на компакт-диске (CD-ROM) и включать программный код, и может быть запущен на оконечном устройстве, таком как персональный компьютер. Однако программные продукты в данном изобретении этим не ограничиваются, в данном документе считываемый носитель информации может быть любым материальным носителем, на котором содержится или хранится программа, которая может использоваться системой выполнения команд, устройством или компонентом или в сочетании с ними.
[000175] Программа может храниться на одном считываемом носителе или на любой комбинации нескольких носителей. Считываемый носитель может быть считываемым носителем сигнала или считываемым носителем информации. Считываемый носитель информации может представлять собой, например, помимо прочего, электрическую, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, устройство или компонент, или любую их комбинацию. Более конкретные примеры считываемых носителей информации (неисчерпывающий список) включают в себя электрические соединения с помощью одного или нескольких проводов, портативные диски, жесткие диски, запоминающее устройство с произвольным доступом (RAM), постоянное ЗУ (ROM), стираемое ПЗУ (EPROM или флэш-память), оптические диски, портативное ПЗУ на компакт-диске (CD-ROM), оптические и магнитные запоминающие устройства или любую подходящую их комбинацию.
[000176] Машиночитаемый носитель данных может включать в себя сигнал передачи данных, распространяемый в основной полосе частот или как часть несущего сигнала, который содержит считываемый программный код. Этот распространяемый сигнал может иметь множество форм, включая, без ограничений, электромагнитный, оптический сигнал или любую подходящую их комбинацию. Считываемый носитель сигнала также может быть любым считываемым носителем, отличным от считываемого носителя информации, он может передавать, распространять или отправлять программы, используемые системой, устройством или компонентом для выполнения команд или их комбинацией. Программный код, содержащийся на считываемом носителе информации, может передаваться с использованием любого подходящего носителя, включая, помимо прочего, беспроводной, проводной, оптический кабель, РЧ и т.д. или любую подходящую их комбинацию.
[000177] Написать программный код для выполнения операции в данном изобретении можно на любой комбинации одного или нескольких языков программирования, включая объектно-ориентированные языки программирования, такие как Java, С++ и т.д., а также обычные процедурные языки программирования, такие как язык "С" или аналогичные языки программирования. Программный код может выполняться полностью на вычислительном устройстве пользователя, частично на устройстве пользователя, как самостоятельный программный пакет, частично на вычислительном устройстве пользователя и частично на удаленном вычислительном устройстве или полностью на удаленном вычислительном устройстве или на сервере. При использовании удаленных вычислительных устройств они могут подключаться к пользовательскому вычислительному устройству по сети любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или может подключаться к внешнему вычислительному устройству (например, по сети Интернет через интернет-провайдера).
[000178] Настоящее изобретение также обеспечивает электронное устройство, которое содержит процессор и память для хранения исполняемых команд процессора; при этом процессор предназначен для управления самоходным устройством указанным выше способом посредством выполнения исполняемых команд.
[000179] Специалисты в данной области техники смогут понять, что все аспекты этого изобретения могут быть реализованы в виде систем, способов или программных продуктов. Поэтому разные аспекты настоящего изобретения могут быть реализованы в следующих формах, а именно: полностью аппаратное воплощение, полностью программное воплощение (включая встроенное ПО, микрокод и т.д.) или комбинация аппаратного и программного воплощений, которые здесь могут совместно именоваться "схема", "модуль" или "система".
[000180] Описание электронного устройства 600 в соответствии с этим вариантом реализации настоящего изобретения показано на фиг.7. Показанное на фиг.7 электронное устройство 600 является лишь примером и не должно налагать никаких ограничений на функции и сферу применения варианта реализации данного изобретения.
[000181] Как показано на фиг.7, электронное устройство 600 реализовано в виде универсального вычислительного устройства. Компоненты электронного устройства 600 могут включать в себя, помимо прочего, по меньшей мере один процессор 610, по меньшей мере один блок памяти 620, шину 630, соединяющую различные компоненты системы (включая блок памяти 620 и процессор (610), блок отображения 640 и т.п.
[000182] При этом в блоке памяти хранится программный код, который может выполняться процессором 610, в результате чего процессор 610 выполняет различные этапы, описанные в различных иллюстративных вариантах реализации настоящего изобретения в части способа управления самоходным устройством.
[000183] Блок памяти 620 может включать в себя считываемый носитель в виде энергозависимого блока памяти, такого как запоминающее устройство с произвольным доступом (RAM) 6201 и/или блок кэширования 6202, и может дополнительно включать в себя постоянное запоминающее устройство (ROM) 6203.
[000184] Блок памяти 620 также может включать в себя программу/утилиту 6204, содержащую набор (по меньшей мере один) программных модулей 6205, и такой программный модуль 6205 включает в себя, помимо прочего, операционную систему, одну или несколько прикладных программ, другие программные модули и программные данные, каждый из которых или их комбинация в данных примерах может включать в себя реализацию сетевой среды.
[000185] Шина 630 может представлять собой структуру, состоящую из одного или нескольких видов шин, включая шину блока памяти или шину системы управления блоком памяти, периферийную шину, ускоренный графический порт, процессор или локальную шину, которая использует любую из множества структур шины.
[000186] Электронное устройство 600 также может взаимодействовать с одним или несколькими внешними устройствами 700 (например, клавиатурой, сенсорным устройством, устройством Bluetooth и т.д.), с одним или несколькими устройствами, которые позволяют пользователю взаимодействовать с электронным устройством 600, и/или с любым устройством (например, маршрутизатором, модемом и т.д.), которое позволяет электронному устройству 600 взаимодействовать с одним или несколькими другими вычислительными устройствами. Это взаимодействие может осуществляться через интерфейс ввода-вывода (I/O) 650. Кроме того, электронное устройство 600 также может через сетевой адаптер 660 взаимодействовать с одной или несколькими сетями (такими как локальная сеть (LAN), глобальная сеть (WAN) и/или сеть общего пользования, такая как Интернет). Сетевой адаптер 660 может через шину 630 взаимодействовать с другими модулями электронного устройства 600. Следует понимать, что хотя это и не показано на рисунке, вместе с электронным устройством 600 можно использовать и другие аппаратные и/или программные модули, включая, помимо прочего, микрокод, драйверы устройств, резервные процессоры, массивы внешних дисков, RAID-системы, ленточные накопители, системы хранения резервных копий данных и т.д.
[000187] На основе описания приведенного выше варианта реализации специалисту в данной области техники легко понять, что описанный здесь вариант может быть реализован с помощью программного обеспечения или комбинации программного обеспечения и необходимого аппаратного обеспечения. Следовательно, техническое решение в данном варианте реализации может быть воплощено в виде программного продукта, который может храниться на энергонезависимом носителе информации (который может представлять собой CD-ROM, USB-диск, переносной жесткий диск и т.д.) или в сети, включая несколько инструкций для реализации вычислительным устройством (которое может быть персональным компьютером, сервером, сетевым устройством и т.д.) вышеупомянутого способа управления самоходным устройством в соответствии с вариантом реализации настоящего изобретения.
[000188] Рассмотрев описание и применив на практике описанное здесь изобретение, специалисты в данной области техники смогут легко придумать и другие варианты реализации настоящего изобретения. Настоящее изобретение охватывает любые модификации, области применения или адаптации, которые соответствуют общим принципам изобретения и включают общедоступные знания или обычные технические средства в области техники, которые не раскрыты в изобретении. Описание и примеры реализации считаются лишь иллюстративными, а подлинная область применения и сущность этого изобретения указаны в формуле изобретения.
[000189] Следует понимать, что настоящее изобретение не ограничивается точной структурой, описанной выше и показанной на чертежах, и включает в себя различные модификации и видоизменения, не выходящие за рамки изобретения. Объем настоящего изобретения ограничен только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходное устройство для уборки (варианты) | 2022 |
|
RU2833158C2 |
| РОБОТ-УБОРЩИК И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2019 |
|
RU2800503C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ, САМОХОДНЫЙ РОБОТ И НОСИТЕЛЬ ДЛЯ ХРАНЕНИЯ ДАННЫХ | 2021 |
|
RU2819023C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ УБОРКИ | 2021 |
|
RU2833581C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ УХУДШЕНИЯ ЛИДАРНЫХ ДАННЫХ | 2021 |
|
RU2826476C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2016 |
|
RU2648029C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ЛАЗЕРНЫХ ХИРУРГИЧЕСКИХ И ТЕРАПЕВТИЧЕСКИХ ЛЕЧЕНИЙ ГЛАЗ | 2018 |
|
RU2766775C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СКЛАДСКИМ РОБОТОМ, РОБОТ И СКЛАДСКАЯ СИСТЕМА | 2021 |
|
RU2833226C1 |
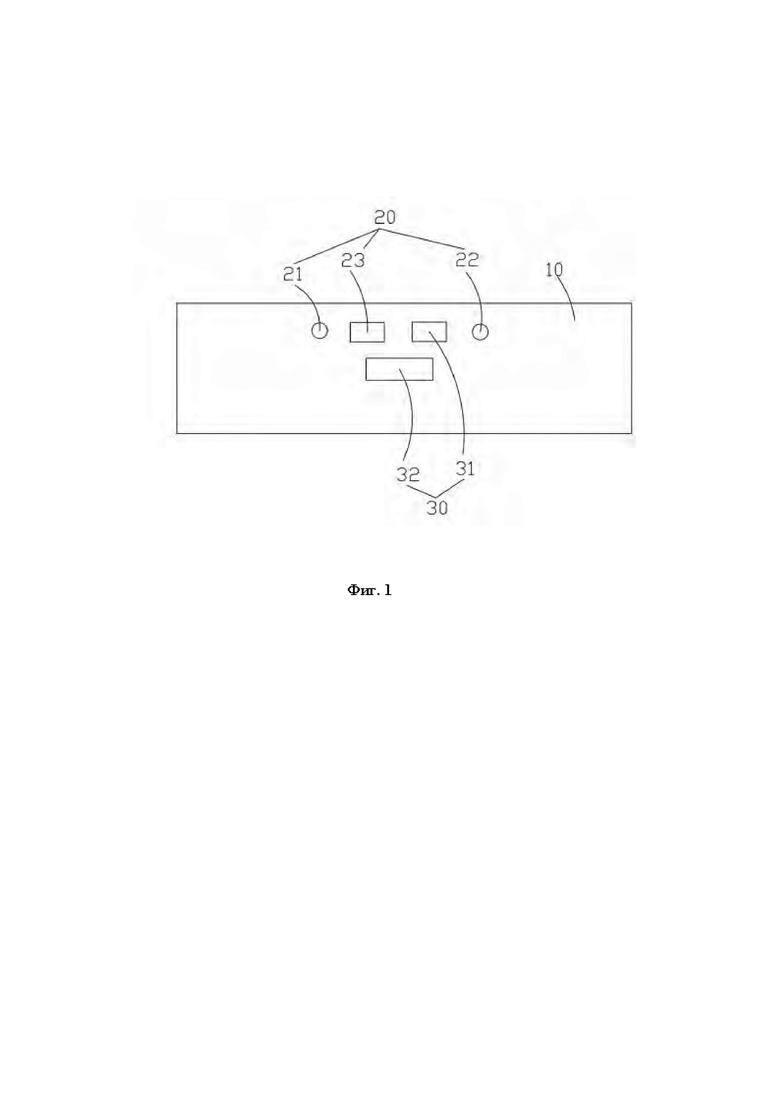
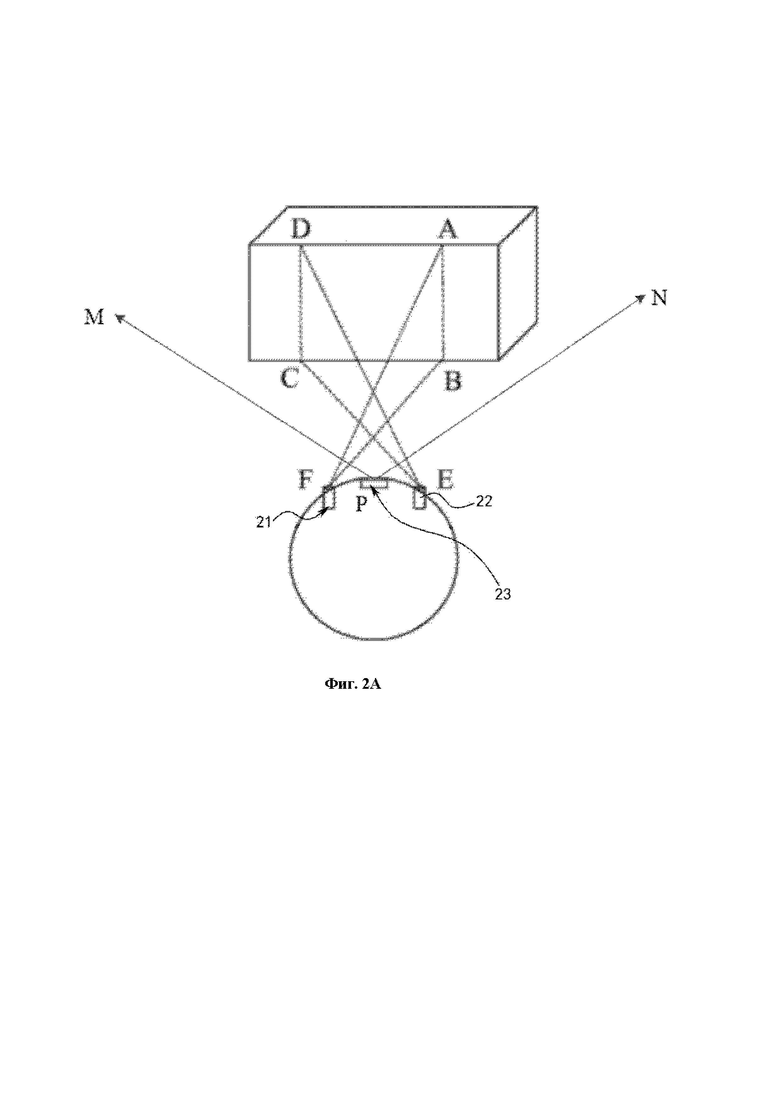
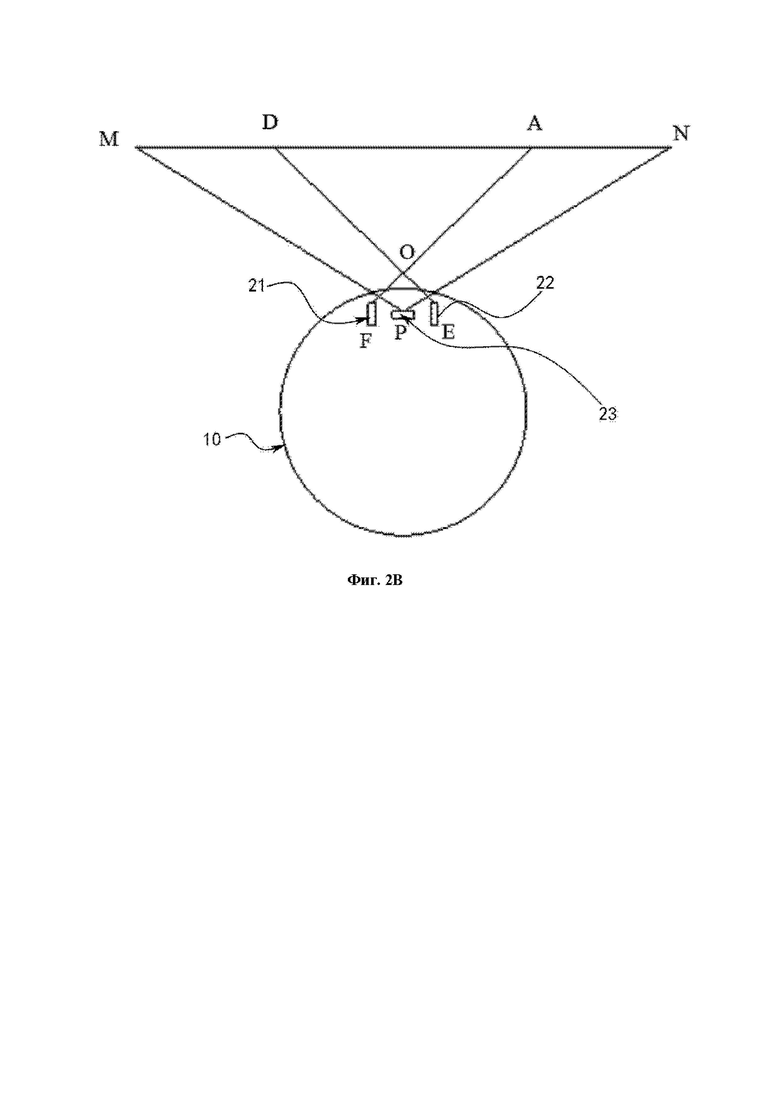
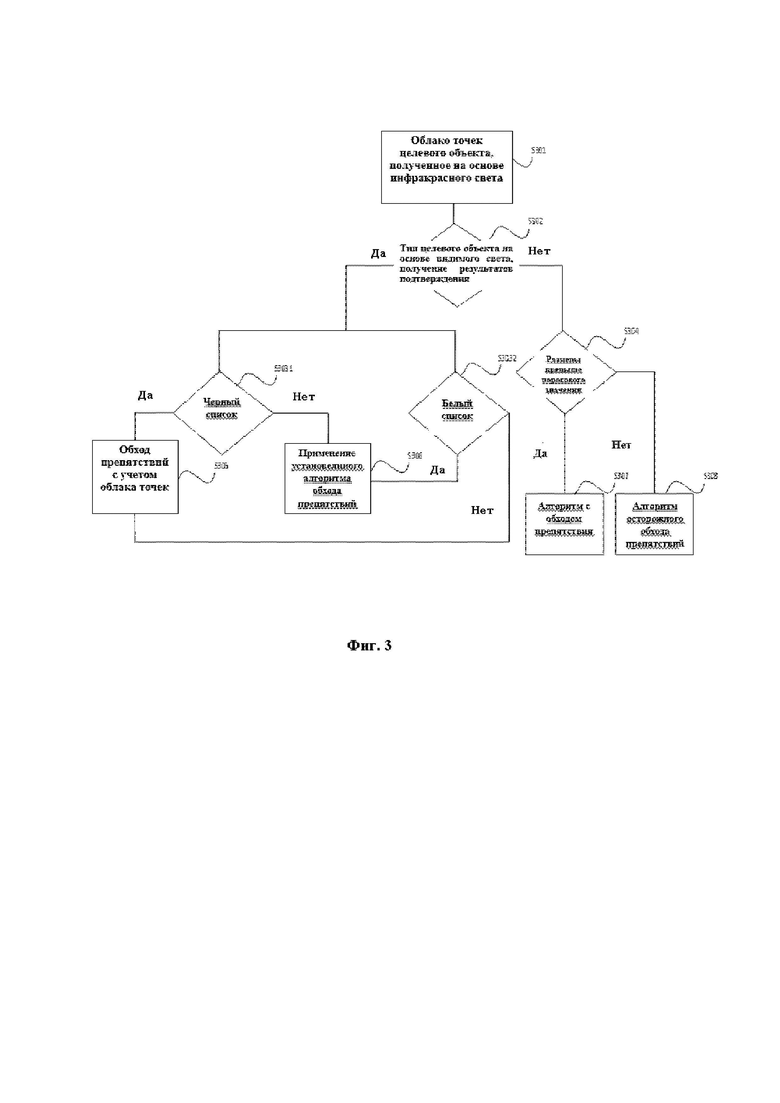
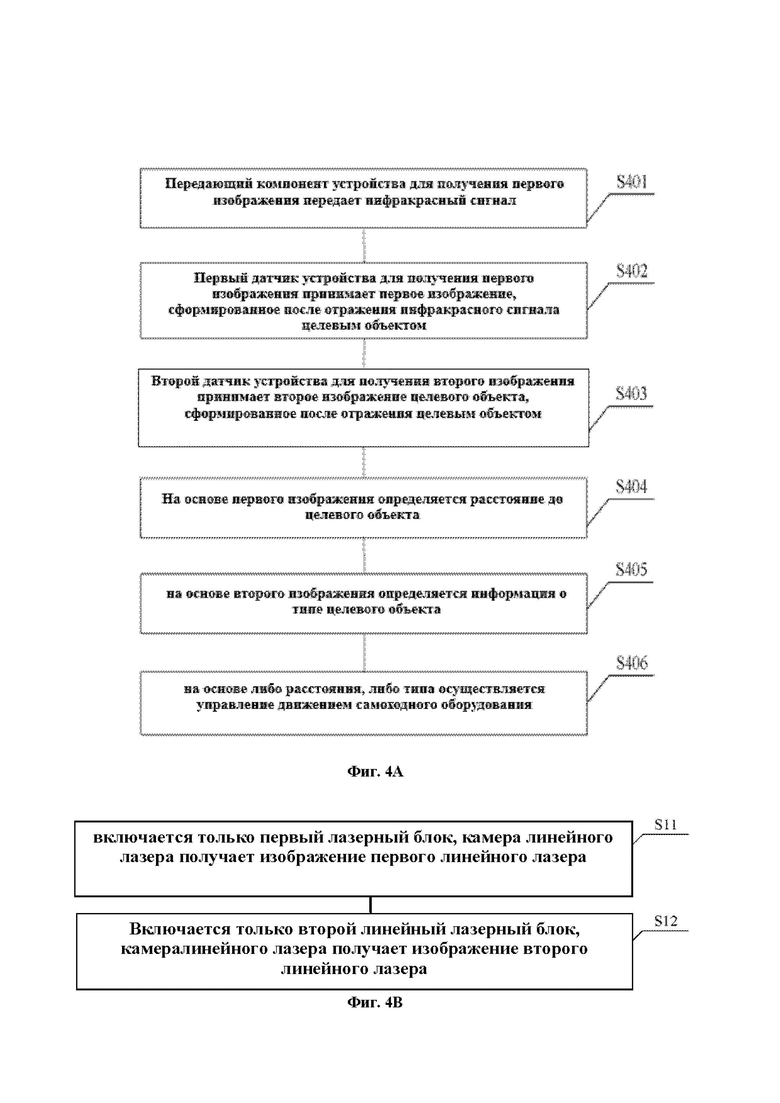
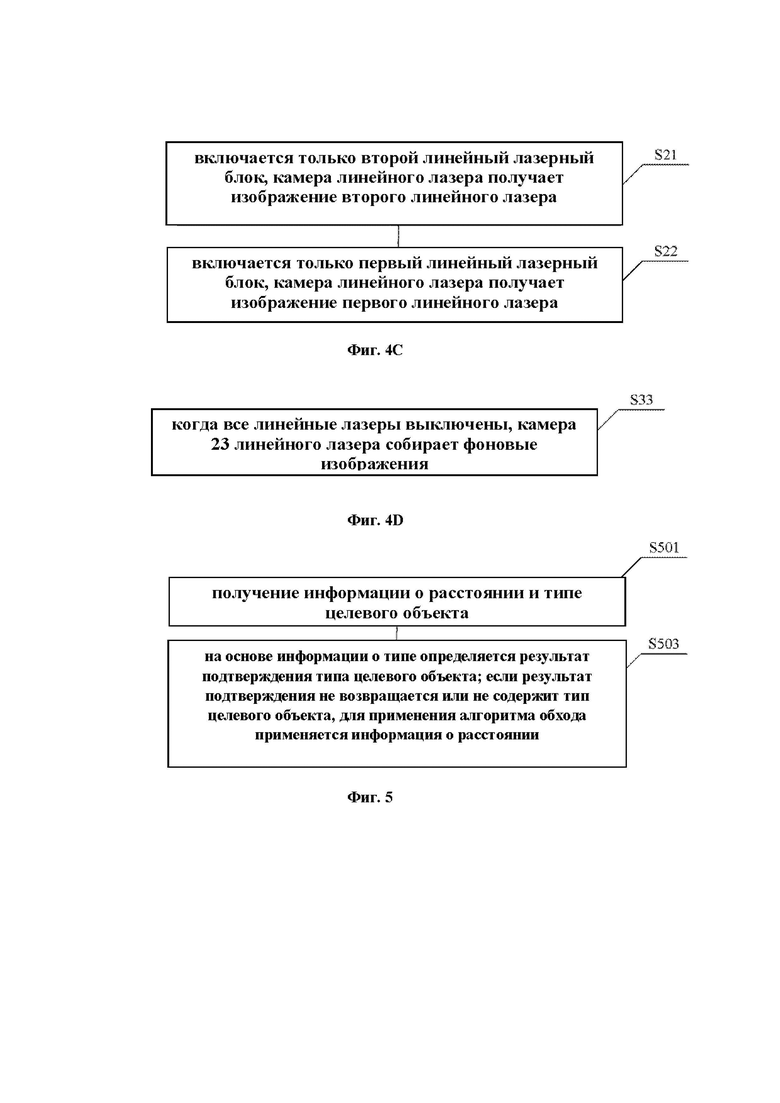
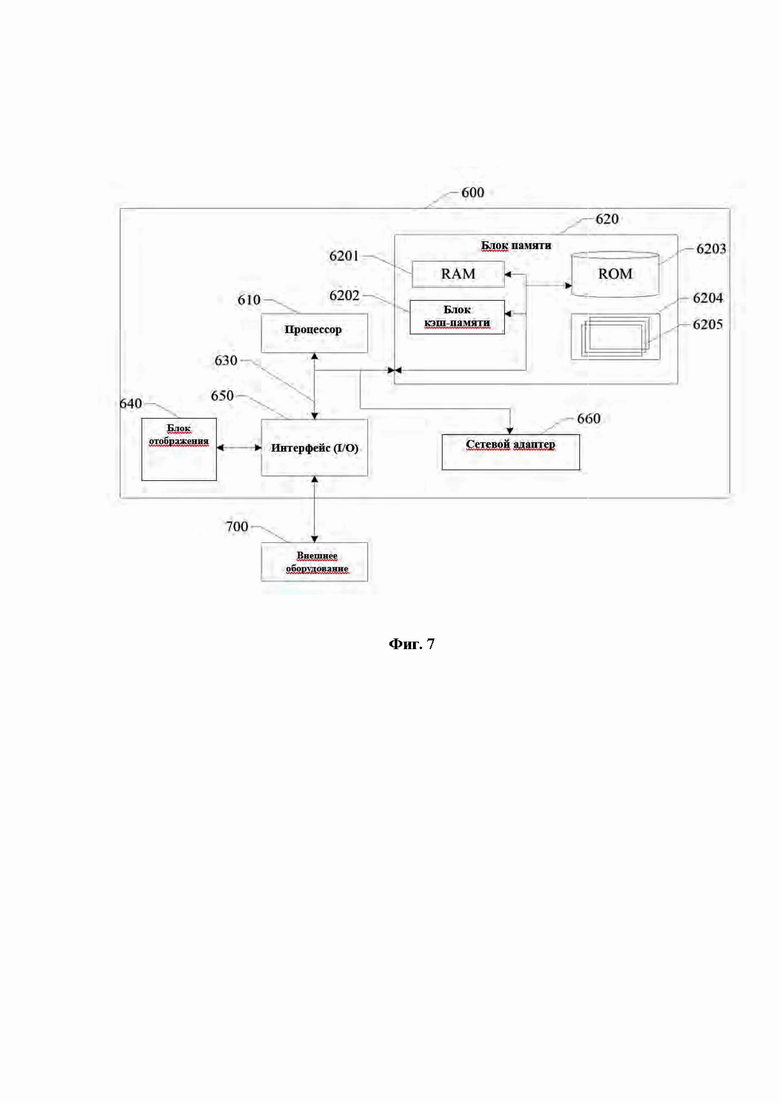
Настоящее изобретение относится к самоходному устройству. Самоходное устройство включает в себя: устройство для получения первого изображения (20), устройство для получения второго изображения (30) и контроллер; устройство для получения первого изображения (20) включает в себя передающий узел для передачи инфракрасного сигнала и первый датчик для приема первого изображения, сформированного после отражения инфракрасного сигнала целевым объектом; на основе первого изображения определяется информация о расстоянии до целевого объекта; устройство для получения второго изображения (30) включает в себя второй датчик, который принимает второе изображение, сформированное после отражения видимого света от целевого объекта, и по второму изображению определяет тип целевого объекта; контроллер управляет работой самоходного устройства, используя как минимум либо полученную информацию о расстоянии, либо информацию о типе. Заявленное изобретение позволяет точно определить, следует ли на маршруте уборки обходить препятствие, что приводит к тому, что уборка выполняется там, где должна, или не происходит столкновение с препятствием. 9 з.п. ф-лы, 7 ил.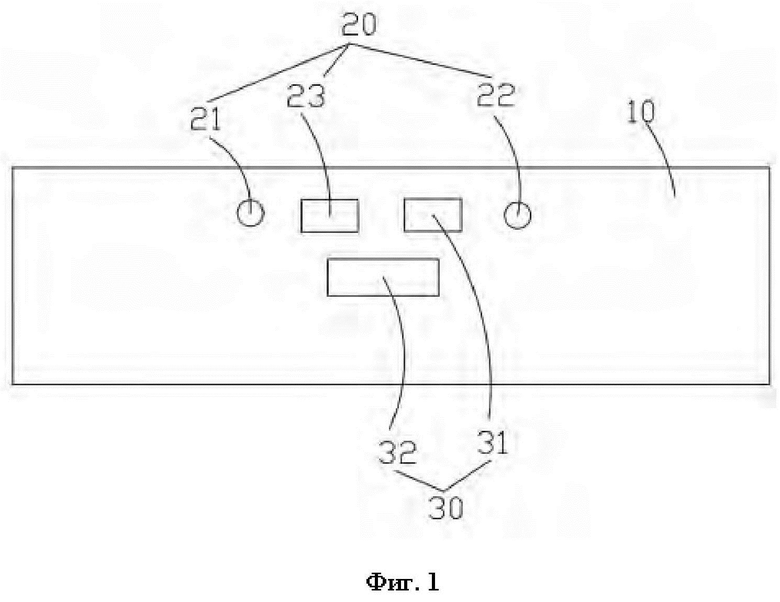
1. Самоходное устройство, способное автоматически выполнять уборку пола и содержащее:
устройство (20) для получения первого изображения, устройство (30) для получения второго изображения и контроллер; при этом
устройство (20) для получения первого изображения включает в себя передающий компонент для передачи инфракрасного сигнала и первый датчик для приема первого изображения, сформированного отражением инфракрасного сигнала от целевого объекта; причем на основе первого изображения определяется расстояние до целевого объекта;
устройство (30) для получения второго изображения включает в себя второй датчик, который принимает второе изображение, сформированное отражением видимого света от целевого объекта, и по второму изображению определяется тип целевого объекта; и
контроллер управляет движением самоходного устройства на основе информации о расстоянии и/или информации о типе целевого объекта.
2. Самоходное устройство по п. 1, в котором передающий компонент содержит по меньшей мере один линейный лазер, который излучает инфракрасный лазерный пучок, при этом первый датчик захватывает первое изображение, которое включает в себя информацию об инфракрасном лазерном пучке, отраженном от целевого объекта.
3. Самоходное устройство по п. 2, в котором по меньшей мере один линейный лазер включает в себя первый линейный лазерный блок (21) и второй линейный лазерный блок (22); и
в направлении проекции самоходного устройства линия соединения между первым датчиком и точкой пересечения первого линейного лазерного пучка, излучаемого первым линейным лазерным блоком (21), и второго линейного лазерного пучка, излучаемого вторым линейным лазерным блоком (22), параллельна направлению движения самоходного устройства вперед.
4. Самоходное устройство по п. 3, в котором первый линейный лазерный пучок и второй линейный лазерный пучок излучаются одновременно или попеременно.
5. Самоходное устройство по любому из пп. 1-4, в котором
первый датчик используется для захвата фонового изображения, и фоновое изображение не содержит информации о первом линейном лазерном пучке и втором линейном лазерном пучке, отраженных целевым объектом.
6. Самоходное устройство по любому из пп. 1-4, в котором устройство (30) для получения второго изображения также включает лампу подсветки (32), при этом по меньшей мере часть видимого света, излучаемого лампой подсветки (32), попадает во второй датчик путем отражения от целевого объекта.
7. Самоходное устройство по п. 6, в котором контроллер включает или выключает лампу подсветки (32) в зависимости от освещенности окружающей среды.
8. Самоходное устройство по любому из пп. 1-4, в котором
на основе первого изображения определяется информация о наблюдаемых трехмерных координатах целевого объекта относительно устройства (20) для получения первого изображения; и
на основе информации о наблюдаемых трехмерных координатах определяется информация о трехмерных координатах целевого объекта относительно земли.
9. Самоходное устройство по любому из пп. 1-4, в котором второе изображение распознается нейронной сетью для определения типа целевого объекта.
10. Самоходное устройство по любому из пп. 1-4, в котором
на основе информации о типе целевого объекта определяется соответствие между целевым объектом и данными словаря для получения результата подтверждения;
на основе информации о расстоянии определяется ориентация целевого объекта; и,
на основании результата подтверждения и/или ориентации целевого объекта, самоходным устройством управляют для выполнения соответствующего алгоритма перемещения.
| CN 112864778 A, 28.05.2021 | |||
| CN 112711250 A, 27.04.2021 | |||
| CN 112148005 A, 09.12 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |

