ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящая заявка относится к роботу-уборщику и способу автоматического управления роботом-уборщиком, который относится к области техники автоматической уборки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] С развитием компьютерных технологий появились различные умные устройства с функциями автоматического перемещения, например роботы уборщики.
[0003] В процессе работы робот-уборщик обычно использует датчики для определения препятствий впереди. Когда датчик обнаруживает, что присутствует препятствие на определенном расстоянии впереди, робот-уборщик перемещается назад и перемещается в другом направлении. Когда датчик обнаруживает, что впереди нет препятствия, робот-уборщик будет перемещаться вперед и выполнять операции по очистке. Например, робот-уборщик обнаруживает препятствия с помощью ультразвуковых и инфракрасных датчиков приближения.
[0004] Однако окружающее пространство для уборки робота-уборщика является сложным. Перед роботом-уборщиком могут находиться различные препятствия, например провода, углы, ножки столов и стульев, ковры и т. д. Поскольку стратегия обхода препятствий приспособлена к перемещению робота-уборщика относительно различных препятствий, это приведет к проблеме плохого очищающего действия.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В настоящей заявке предоставлены робот-уборщик и способ автоматического управления роботом-уборщиком, которые могут решить проблему, заключающуюся в том, что существующий робот-уборщик единообразно использует стратегию обхода препятствий при обнаружении препятствия, что приводит к плохому очищающему действию. В настоящей заявке предоставлены следующие технические решения.
[0006] В первом аспекте предоставлен робот-уборщик, и робот-уборщик содержит:
[0007] корпус;
[0008] по меньшей мере один излучающий лазер компонент, расположенный на корпусе, причем каждый излучающий лазер компонент выполнен с возможностью проецирования лазера в направлении перемещения;
[0009] по меньшей мере один компонент получения изображения, расположенный на корпусе, причем каждый компонент получения изображения выполнен с возможностью получения целевого изображения в направлении перемещения;
[0010] компонент обработки, соединенный с каждым излучающим лазер компонентом и каждым компонентом получения изображения, при этом компонент обработки выполнен с возможностью получения целевого изображения, собранного компонентом получения изображения; при этом, когда имеется проекционное изображение точки проекции, в которой лазер проецируется на препятствие на целевом изображении, получается информация о контуре препятствия; определяется тип препятствия, указанный информацией о контуре; и робот-уборщик управляется для уборки в соответствии с режимом уборки, соответствующим типу препятствия.
[0011] Необязательно, компонент обработки выполнен с возможностью:
[0012] определения расстояния между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности для каждой точки проекции, спроецированной на препятствие, причем компонент получения целевого изображения представляет собой компонент получения изображения, который получает проекционное изображение точки проекции;
[0013] определения трехмерных координат точки проекции относительно компонента получения целевого изображения в соответствии с расстоянием между точкой проекции и компонентом получения целевого изображения; и
[0014] определения информации о контуре препятствия на основе трехмерных координат множества точек проекции на препятствии.
[0015] Необязательно, компонент получения изображения содержит объектив и компонент формирования изображения, излучающий лазер компонент содержит излучающую лазер головку;
[0016] для каждой точки проекции, проецируемой на препятствие, компонент обработки выполнен с возможностью:
[0017] получения заданного расстояния между излучающей лазер головкой излучающего целевой лазер компонента, который проецирует точку проекции, и объективом компонента получения целевого изображения;
[0018] получения угла сходимости между первой линией соединения и второй линией соединения, при этом первая линия соединения представляет собой линию соединения между излучающим целевой лазер компонентом и точкой проекции, и вторая линия соединения представляет собой линию соединения между излучающей лазер головкой излучающего целевой лазер компонента и объективом компонента получения целевого изображения;
[0019] получения фокусного расстояния компонента получения целевого изображения;
[0020] получения положения формирования изображения проекционного изображения на компоненте формирования изображения; и
[0021] вычисления расстояния между точкой проекции и компонентом получения целевого изображения на основе принципа подобных треугольников в соответствии с заданным расстоянием, углом сходимости, фокусным расстоянием и положением формирования изображения.
[0022] Необязательно, множество точек проекции на препятствии включает:
[0023] множество точек проекции, генерируемых множеством излучающих лазер компонентов, проецирующих лазер на препятствие; и/или
[0024] множество точек проекции, создаваемых одним и тем же излучающим лазер компонентом, проецирующим лазер на множество поверхностей препятствия; и/или
[0025] множество точек проекции, генерируемых излучающим лазер компонентом, проецирующим лазер на препятствие под разными углами, после того как робот-уборщик приводит в движение тот же излучающий лазер компонент.
[0026] Необязательно, компонент обработки выполнен с возможностью:
[0027] управления роботом-уборщиком для перехода в режим обхода препятствий, когда препятствие представляет собой препятствие типа катушка или провод;
[0028] планирования проходимого маршрута для управления роботом-уборщиком для прохождения через препятствие, когда препятствие представляет собой препятствие колоннообразного типа;
[0029] управления боковой щеткой на роботе-уборщике для очистки внутреннего угла в определенном режиме движения, когда препятствие представляет собой препятствие типа внутренний угол;
[0030] управления роботом-уборщиком для уборки вдоль края внешнего угла, когда препятствие представляет собой препятствие типа внешний угол;
[0031] определения, может ли робот-уборщик преодолеть препятствие текущего порогового типа, когда препятствие представляет собой препятствие порогового типа;
[0032] управления силой всасывания вентилятора на роботе-уборщике для увеличения и/или прекращения функции мытья полов и распыления воды, когда тип препятствия представляет собой край ковра или щель.
[0033] Необязательно, углы излучения лазера, излучаемого различными излучающими лазер компонентами, являются одинаковыми или разными.
[0034] Необязательно, объектив компонента получения изображения представляет собой объектив прямого обзора, панорамный отражающий объектив, частично отражающий объектив или перископический объектив.
[0035] Во втором аспекте предоставлен способ автоматического управления роботом-уборщиком, который используется в роботе-уборщике, предусмотренном в первом аспекте, и способ включает:
[0036] получение целевого изображения, собранного компонентом получения изображения;
[0037] получение информации о контуре препятствия, когда имеется проекционное изображение точки проекции, спроецированной лазером на препятствие на целевом изображении;
[0038] определение типа препятствия, указанного информацией о контуре; и
[0039] управление роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия.
[0040] Необязательно, получение информации о контуре препятствия включает:
[0041] определение расстояния между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности для каждой точки проекции, спроецированной на препятствие, при этом компонент получения целевого изображения представляет собой компонент получения изображения, который получает проекционное изображение точки проекции;
[0042] определение трехмерных координат точки проекции относительно компонента получения целевого изображения в соответствии с расстоянием между точкой проекции и компонентом получения целевого изображения; и
[0043] определение информации о контуре препятствия на основе трехмерных координат множества точек проекции на препятствии.
[0044] Необязательно, определение расстояния между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности для каждой точки проекции, спроецированной на препятствие, включает:
[0045] получение заданного расстояния между излучающей лазер головкой излучающего целевой лазер компонента, который проецирует точку проекции, и объективом компонента получения целевого изображения;
[0046] получение угла сходимости между первой линией соединения и второй линией соединения, при этом первая линия соединения представляет собой линию соединения между излучающим целевой лазер компонентом и точкой проекции, и вторая линия соединения представляет собой линию соединения между излучающей лазер головкой излучающего целевой лазер компонента и объективом компонента получения целевого изображения;
[0047] получение фокусного расстояния компонента получения целевого изображения;
[0048] получение положения формирования изображения проекционного изображения на компоненте формирования изображения; и
[0049] вычисление расстояния между точкой проекции и компонентом получения целевого изображения на основе принципа подобных треугольников в соответствии с заданным расстоянием, углом сходимости, фокусным расстоянием и положением формирования изображения.
[0050] Необязательно, управление роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия, включает:
[0051] управление роботом-уборщиком для перехода в режим обхода препятствий, когда препятствие представляет собой препятствие типа катушка или типа провод;
[0052] планирование проходимого маршрута для управления роботом-уборщиком для прохождения через препятствие, когда препятствие представляет собой препятствие колоннообразного типа;
[0053] управление боковой щеткой на роботе-уборщике для очистки внутреннего угла в определенном режиме движения, когда препятствие представляет собой препятствие типа внутренний угол;
[0054] управление роботом-уборщиком для уборки вдоль края внешнего угла, когда препятствие представляет собой препятствие типа внешний угол;
[0055] определение, может ли робот-уборщик преодолеть препятствие текущего порогового типа, когда препятствие представляет собой препятствие порогового типа;
[0056] управление силой всасывания вентилятора на роботе-уборщике для увеличения и/или прекращения функции мытья полов и распыления воды, когда тип препятствия представляет собой край ковра или щель.
[0057] В третьем аспекте предоставлен машиночитаемый носитель данных. На носителе данных хранится программа. Программа загружается и исполняется процессором для выполнения способа автоматического управления роботом-уборщиком согласно второму аспекту.
[0058] Положительный эффект настоящего изобретения заключается в том, что: посредством предоставления по меньшей мере одного излучающего лазер компонента, расположенного на корпусе; посредством предоставления по меньшей мере одного компонента получения изображения, расположенного на корпусе; посредством предоставления компонента обработки, соединенного с каждым излучающим лазер компонентом и каждым компонентом получения изображения, и при этом компонент обработки выполнен с возможностью получения целевого изображения, собранного компонентом получения изображения; посредством получения информации о контуре препятствия, когда имеется проекционное изображение точки проекции, где лазер проецируется на препятствие на целевом изображении; посредством определения типа препятствия, указанного информацией о контуре; и посредством управления роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия, оно может решить проблему, заключающуюся в том, что существующий робот-уборщик единообразно использует стратегию обхода препятствий при обнаружении препятствия, что приводит к плохому очищающему действию. Поскольку робот-уборщик может использовать различные режимы уборки в соответствии с различными типами препятствий, вместо того, чтобы обходить все препятствия и не убирать, очищающая способность робота-уборщика может быть улучшена.
[0059] Приведенное выше описание является только обзором технических решений настоящей заявки. С целью более ясного понимания технических средств настоящего изобретения и реализации их в соответствии с содержанием описания ниже подробно описаны предпочтительные варианты осуществления настоящего изобретения и прилагаемые графические материалы.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
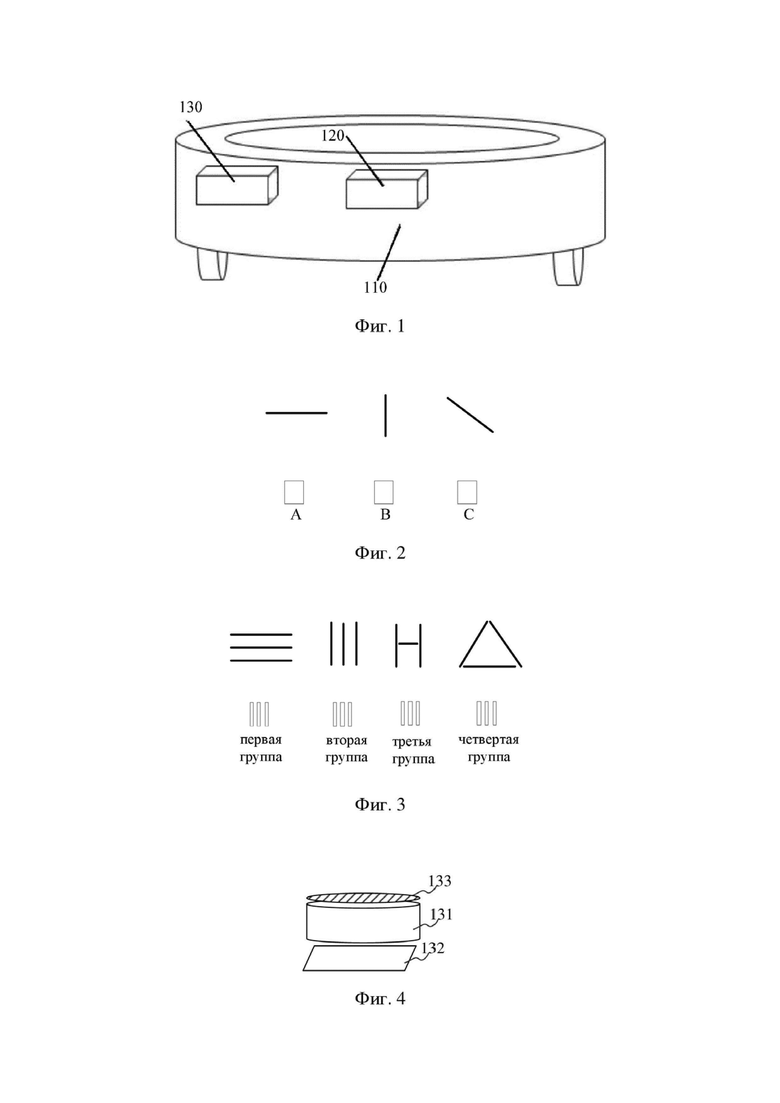
[00605] На фиг. 1 представлен схематический вид конструкции робота-уборщика, предоставленного вариантом осуществления настоящей заявки;
[0061] на фиг. 2 представлен схематический вид лазера, излучаемого излучающим лазер компонентом, предоставленного вариантом осуществления настоящего изобретения;
[0062] на фиг. 3 представлен схематический вид лазера, излучаемого излучающим лазер компонентом, предоставленного другим вариантом осуществления настоящего изобретения;
[0063] на фиг. 4 представлен схематический вид конструкции компонента получения изображения, предоставленного вариантом осуществления настоящего изобретения;
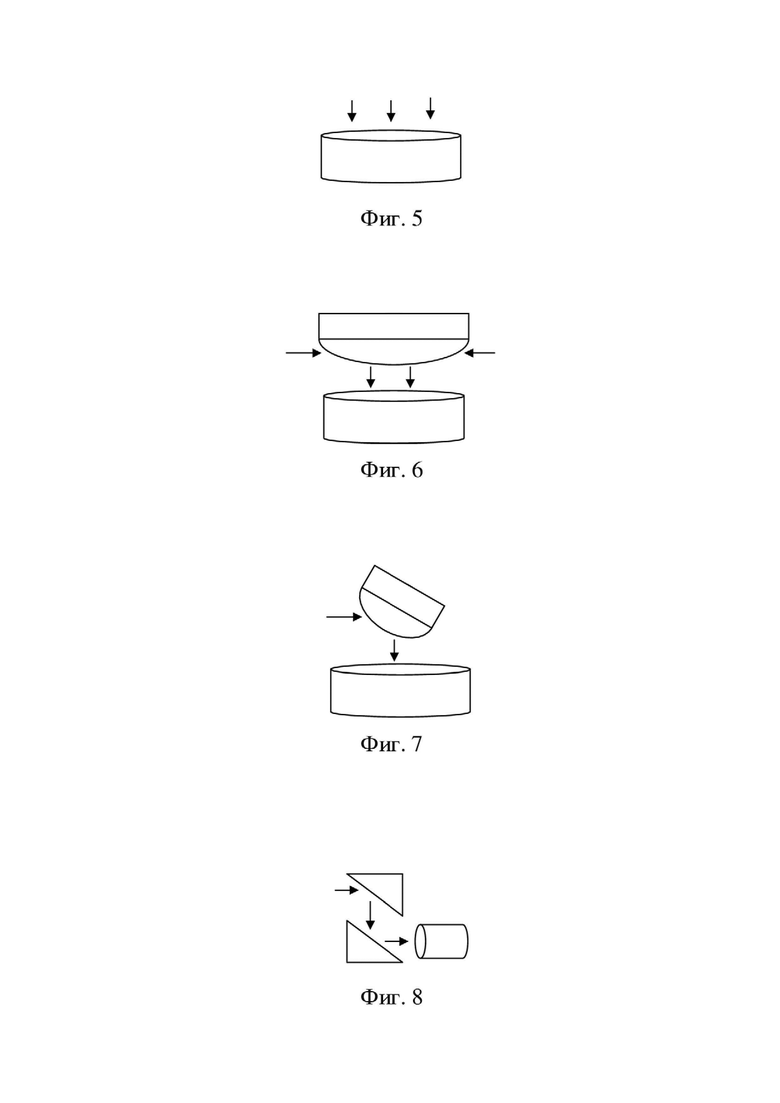
[0064] на фиг. 5 представлен схематический вид объектива компонента получения изображения, предоставленного вариантом осуществления настоящего изобретения;
[0065] на фиг. 6 представлен схематический вид объектива компонента получения изображения, предоставленного другим вариантом осуществления настоящего изобретения;
[0066] на фиг. 7 представлен схематический вид объектива компонента получения изображения, предоставленного другим вариантом осуществления настоящего изобретения;
[0067] на фиг. 8 представлен схематический вид объектива компонента получения изображения, предоставленного другим вариантом осуществления настоящего изобретения;
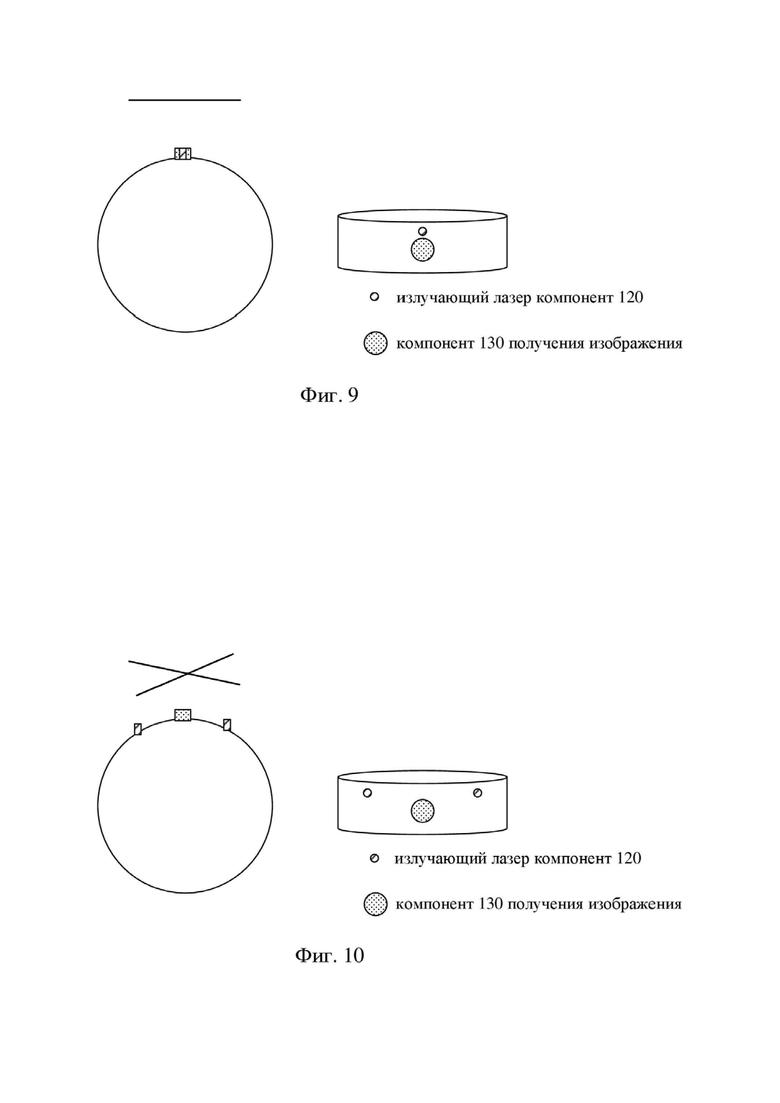
[0068] на фиг. 9 представлен схематический вид относительного положения компонента получения изображения и излучающего лазер компонента, предоставленных первым вариантом осуществления настоящего изобретения;
[0069] на фиг. 10 представлен схематический вид относительного положения компонента получения изображения и излучающего лазер компонента, предоставленных вторым вариантом осуществления настоящего изобретения;
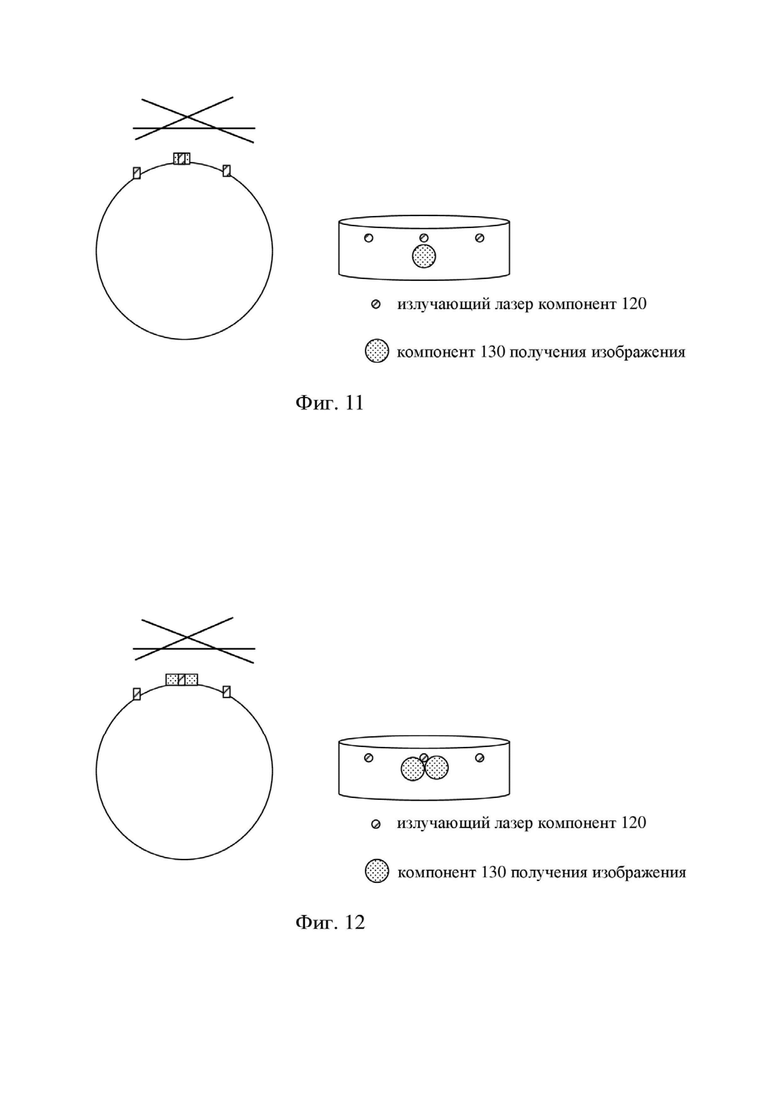
[0070] на фиг. 11 представлен схематический вид относительного положения компонента получения изображения и излучающего лазер компонента, предоставленных третьим вариантом осуществления настоящего изобретения;
[0071] на фиг. 12 представлен схематический вид относительного положения компонента получения изображения и излучающего лазер компонента, предоставленных четвертым вариантом осуществления настоящего изобретения;
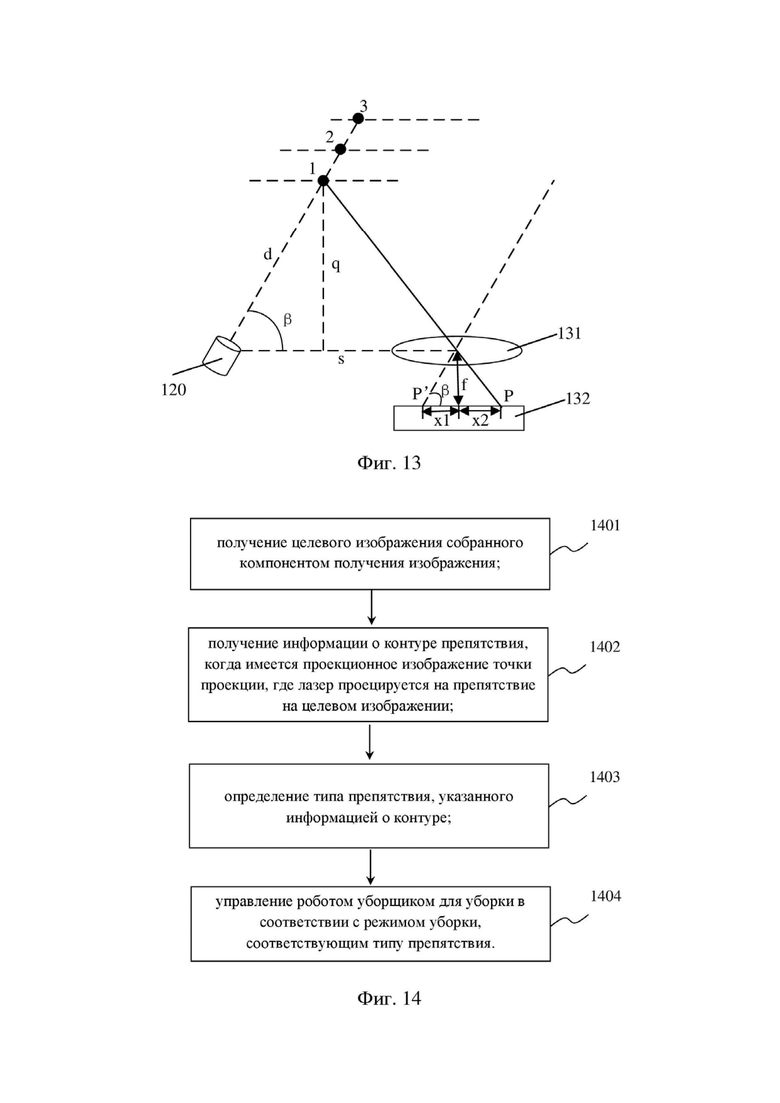
[0072] на фиг. 13 представлен схематический вид измерения расстояния до точки передачи на основе триангуляционного способа измерения дальности, предоставленного вариантом осуществления настоящего изобретения; и
[0073] на фиг. 14 представлена блок-схема способа автоматического управления роботом-уборщиком, предусмотренным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0074] Конкретные реализации настоящего изобретения будут описаны более подробно ниже со ссылкой на прилагаемые графические материалы и варианты осуществления. Следующие примеры приспособлены для иллюстрации настоящего изобретения, но не предназначены для ограничения объема настоящего изобретения.
[0075] Следует отметить, что подробное описание, изложенное в связи с прилагаемыми графическими материалами, предусмотрено в качестве описания различных конфигураций и не предназначено для представления единственных конфигураций, в которых могут быть применены на практике описанные в настоящем документе концепции. Варианты осуществления устройства и варианты осуществления способа, описанные в настоящем документе, описаны в следующем подробном описании и проиллюстрированы на прилагаемых графических материалах различными блоками, модулями, узлами, компонентами, схемами, этапами, процессами, алгоритмами и т. д. (совместно именуемыми «элементами»), как показано. Эти элементы могут быть реализованы с использованием электронного аппаратного обеспечения, компьютерного программного обеспечения или любой их комбинации. Реализуются ли эти элементы в виде аппаратного обеспечения или программного обеспечения зависит от конкретного применения и конструктивных ограничений, наложенных на всю систему. Если такие термины, как «первый» и «второй», используются в описании и пунктах формулы настоящей заявки, и графических материалах в описании, такие описания приспособлены для различения разных объектов, а не для описания определенного порядка.
[0076] Следует понимать, что при использовании в этом описании и прилагаемой формуле термины «включающий» и «содержащий» указывают на наличие описанных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают наличие или добавление одного или более других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их наборов. Также следует понимать, что терминология, используемая в описании изобретения в настоящем документе, предназначена только для целей описания конкретных вариантов осуществления и не предназначена для ограничения изобретения. Используемые в этом описании и прилагаемой формуле изобретения формы единственного числа предназначены для включения множественного числа, если контекст явно не указывает иное. Кроме того, следует также понимать, что используемый в этом описании и прилагаемой формуле изобретения термин «и/или» относится к любым и всем возможным комбинациям одного или более связанных перечисленных элементов и включает их.
[0077] Следует отметить, что при отсутствии явного специального описания каждый технический признак в каждом варианте осуществления настоящего изобретения можно рассматривать как тот, который можно комбинировать с другими при условии, что комбинация не является невозможной для реализации по техническим причинам. С целью более полного описания настоящего изобретения некоторые иллюстративные, необязательные или предпочтительные признаки описаны в сочетании с другими техническими признаками в каждом варианте осуществления настоящего изобретения. Однако эта комбинация не является обязательной, и следует понимать, что иллюстративные, необязательные или предпочтительные признаки и другие технические признаки являются отделимыми или независимыми друг от друга, если такая отделимость или независимость не обусловлена техническими причинами, которые не могут быть реализованы. Некоторые функциональные описания технических признаков в вариантах осуществления способа могут пониматься как выполнение функций, способов или этапов. Некоторые функциональные описания технических признаков в варианте осуществления устройства могут пониматься как использование такого устройства для выполнения функций, способов или этапов.
[0078] На фиг. 1 представлен схематический вид конструкции робота-уборщика, предоставленного вариантом осуществления настоящего изобретения. Как показано на фиг. 1, робот-уборщик по меньшей мере содержит:
[0079] корпус 110;
[0080] по меньшей мере один излучающий лазер компонент 120, расположенный на корпусе 110, причем каждый излучающий лазер компонент 120 выполнен с возможностью проецирования лазера в направлении перемещения;
[0081] по меньшей мере один компонент 130 получения изображения, расположенный на корпусе 110, причем каждый компонент 130 получения изображения выполнен с возможностью получения целевого изображения в направлении перемещения;
[0082] компонент 140 обработки (не показан на фиг. 1), соединенный с каждым излучающим лазер компонентом 120 и каждым компонентом 130 получения изображения, причем компонент 140 обработки выполнен с возможностью получения целевого изображения, собранного компонентом 130 получения изображения; когда имеется проекционное изображение точки проекции, в которой лазер проецируется на препятствие на целевом изображении, получается информация о контуре препятствия; определяется тип препятствия, указанный информацией о контуре; и робот-уборщик управляется для уборки в соответствии с режимом уборки, соответствующим типу препятствия.
[0083] При этом направление перемещения может быть направлением, в котором перемещается робот-уборщик. Например, если робот-уборщик перемещается назад, направление перемещения робота-уборщика является обратным. В качестве альтернативы направление перемещения также может быть направлением, в котором собирается перемещаться неподвижный робот-уборщик.
[0084] Необязательно, излучающий лазер компонент 120 может представлять собой гелий-неоновый лазер, аргоновый ионный лазер, полупроводниковый лазер на арсениде галлия или т. п., и тип излучающего лазер компонента 120 в этом варианте осуществления не ограничен. Лазер, проецируемый излучающим лазер компонентом 120, представляет собой лазерный луч (или линейный лазер).
[0085] Необязательно, лазерный луч испускается во всем 180-градусном горизонтальном диапазоне перед роботом-уборщиком, чтобы могли быть обнаружены препятствия в левом, среднем и правом диапазонах перед роботом-уборщиком, и диапазон обнаружения является более полным. Лазерный луч позволяет обнаруживать препятствия в среднем и нижнем положениях в числовом направлении, вследствие чего также могут быть обнаружены препятствия, расположенные на полу и с меньшей высотой, например дверные пороги, края ковра, ступени, зазоры напольной плитки и т. п.
[0086] Необязательно, может быть один или более излучающих лазер компонентов 120. Для каждого излучающего лазер компонента 120 лазер, излучаемый излучающим лазер компонентом 120, может быть параллелен горизонтальной плоскости (со ссылкой на лазер, излучаемый излучающим лазер компонентом А, показанный на фиг. 2), вертикальным относительно горизонтальной плоскости (со ссылкой на лазер, излучаемый излучающим лазер компонентом В, показанный на фиг. 2) или пересекаться с горизонтальной плоскостью (со ссылкой на лазер, излучаемый излучающим лазер компонентом C, показанный на фиг. 2). Этот вариант осуществления не ограничивает углы излучения лазера излучающим лазер компонентом 120.
[0087] Когда количество излучающих лазер компонентов 120 равно по меньшей мере двум, углы излучения лазера разных излучающих лазер компонентов 120, одинаковы или различны. Например, что касается лазеров, излучаемых четырьмя группами излучающих лазер компонентов 120, показанными на фиг. 3, для первой группы излучающих лазер компонентов 120 каждый излучающий лазер компонент 120 излучает лазер под одним и тем же углом, и излучаемый лазер параллелен горизонтальной плоскости; для второй группы излучающих лазер компонентов 120 каждый излучающий лазер компонент 120 излучает лазер под одним и тем же углом, и излучаемый лазер перпендикулярен горизонтальной плоскости; для третьей группы излучающих лазер компонентов 120 первый излучающий лазер компонент и третий излучающий лазер компонент излучают лазер под одним и тем же углом (лазер перпендикулярен горизонтальной плоскости), а первый излучающий лазер компонент и второй излучающий лазер компонент излучают лазер под другим углом (лазер горизонтален относительно горизонтальной плоскости); и для четвертой группы излучающих лазер компонентов 120 углы, под которыми первый излучающий лазер компонент, второй излучающий лазер компонент и третий излучающий лазер компонент излучают лазер, различны.
[0088] Каждый излучающий лазер компонент 120 содержит излучающую лазер головку, которая излучает лазер. Разумеется, излучающий лазер компонент 120 также содержит другие компоненты, необходимые в процессе излучения лазера, такие как компонент генерирования лазера, компонент ускорения фотонов и т. д., которые не будут подробно описаны в этом варианте осуществления.
[0089] Необязательно, компонент 130 получения изображения может представлять собой миниатюрную видеокамеру, фотокамеру или т. п., и тип компонента 130 получения изображения в этом варианте осуществления не ограничен.
[0090] Ссылаясь на фиг. 4, компонент 130 получения изображения содержит объектив 131 и компонент 132 формирования изображения.
[0091] Необязательно, объектив 131 включает, но без ограничения, следующие типы: объектив прямого обзора, панорамный отражающий объектив, частично отражающий объектив или перископический объектив. Ссылаясь на фиг. 5, объектив прямого обзора относится к объективу, который поддерживает прямое падение света. Ссылаясь на фиг. 6, панорамный отражающий объектив относится к объективу, в который падают световые лучи под разными углами после однократного отражения. Ссылаясь на фиг. 7, частично отражающий объектив относится к объективу, в котором свет отражается один раз под определенным углом, а затем падает. Ссылаясь на фиг. 8, перископический объектив относится к объективу, в который свет падает по меньшей мере после двух отражений. На объективе 131 предусмотрен полосовой фильтр 133. Полосовой фильтр 133 делает компонент 130 получения изображения видимым только для лазера, излучаемого излучающим лазер компонентом 120.
[0092] Необязательно, компонент 132 формирования изображения может представлять собой датчик на основе комплементарного металлооксидного полупроводника (КМОП) или прибор с зарядовой связью (ПЗС) и т. д. Тип компонента 132 формирования изображения в этом варианте осуществления не ограничен.
[0093] Количество компонентов 130 получения изображения равно одному или более. Необязательно, как компонент 130 получения изображения, так и излучающий лазер компонент 120 расположены сбоку корпуса 110. Компонент 130 получения изображения может быть расположен выше излучающего лазер компонента 120. В качестве альтернативы компонент 130 получения изображения также может быть расположен ниже излучающего лазер компонента 120. В качестве альтернативы компоненты 130 получения изображения и излучающие лазер компоненты 120 поочередно расположены в одной и той же горизонтальной плоскости. В этом варианте осуществления не ограничено расположение компонента 130 получения изображения и излучающего лазер компонента 120.
[0094] В первом варианте осуществления, ссылаясь на фиг. 9, количество как излучающих лазер компонентов 120, так и компонентов 130 получения изображения равно единице; компонент 130 получения изображения и излучающий лазер компонент 120 оба расположены сбоку корпуса 110; и излучающий лазер компонент 120 расположен непосредственно над компонентом 130 получения изображения.
[0095] Во втором варианте осуществления, ссылаясь на фиг. 10, количество излучающих лазер компонентов 120 равно двум, а количество компонентов 130 получения изображения равно одному; компонент 130 получения изображения и излучающий лазер компонент 120 оба расположены сбоку корпуса 110; один излучающий лазер компонент 120 расположен в верхней левой части компонента 130 получения изображения, а другой излучающий лазер компонент 120 расположен в верхней правой части компонента 130 получения изображения.
[0096] В третьем варианте осуществления, ссылаясь на фиг. 11, количество излучающих лазер компонентов 120 равно трем, а количество компонентов 130 получения изображения равно одному; причем компонент 130 получения изображения, и излучающий лазер компонент 120 оба расположены сбоку корпуса 110; первый излучающий лазер компонент 120 расположен в верхней левой части компонента 130 получения изображения, второй излучающий лазер компонент 120 расположен непосредственно над компонентом 130 получения изображения, и третий излучающий лазер компонент 120 расположен в верхней правой части компонента 130 получения изображения.
[0097] В четвертом варианте осуществления, ссылаясь на фиг. 12, количество излучающих лазер компонентов 120 равно трем; количество компонентов 130 получения изображения равно двум; и компонент 130 получения изображения, и излучающий лазер компонент 120 оба расположены сбоку корпуса 110. Три излучающих лазер компонента 120 расположены над двумя компонентами 130 получения изображения.
[0098] В этом варианте осуществления излучающий лазер компонент 120 и компонент 130 получения изображения работают под управлением компонента 140 обработки. Компонент 140 обработки управляет излучающим лазер компонентом 120 для излучения лазера. Если перед процессом испускания лазера имеется препятствие, направление испускания лазера изменяется, и на препятствие проецируется точка проекции. В это время целевое изображение, собранное компонентом 130 получения изображения, содержит проекционное изображение точки проекции. Соответственно, компонент 140 обработки получает целевое изображение, полученное компонентом 130 получения изображения, и выполняет анализ изображения в соответствии с проекционным изображением на целевом изображении, чтобы получить расстояние до препятствия. Необязательно, если перед процессом испускания лазера нет препятствия, направление испускания лазера не меняется, и точка проекции не проецируется на препятствие. В это время целевое изображение, собранное компонентом 130 получения изображения, не содержит проекционное изображение точки проекции.
[0099] В варианте осуществления, когда предусмотрено множество излучающих лазер компонентов 120, компонент 140 обработки управляет последовательностью включения множества излучающих лазер компонентов 120 в течение определенного периода времени. Например, когда количество излучающих лазер компонентов 120 равно двум, компонент 140 обработки управляет первым излучающим лазер компонентом 120, который включается первым; когда время включения достигает 0,5 с, первый излучающий лазер компонент 120 управляется для выключения, а второй излучающий лазер компонент 120 включается; когда время включения второго излучающих лазер компонента 120 достигает 0,5 с, второй излучающий лазер компонент 120 управляется для выключения, а затем первый излучающий лазер компонент 120 управляется для включения, и цикл повторяется.
[00100] В другом варианте осуществления, когда предусмотрено множество излучающих лазер компонентов 120, компонент 140 обработки делит множество излучающих лазер компонентов 120 на несколько групп и управляет включением излучающих лазер компонентов 120 из множества групп на определенный период времени соответственно. Например, когда количество групп излучающих лазер компонентов 120 равно двум (каждая группа содержит два излучающих лазер компонента), и компонент 140 обработки управляет первой группой излучающих лазер компонентов 120, чтобы она включалась первой; когда время включения достигает 0,5 с, первая группа излучающих лазер компонентов 120 управляется для выключения, и вторая группа излучающих лазер компонентов 120 включается; когда время включения второй группы излучающих лазер компонентов 120 достигает 0,5 с, вторая группа излучающих лазер компонентов 120 управляется для выключения, а затем первая группа излучающих лазер компонентов 120 управляется для включения, и цикл повторяется.
[00101] Необязательно, когда имеется проекционное изображение точки проекции, спроецированной лазером на препятствие на целевом изображении, компонент 140 обработки, получающий информацию о контуре препятствия, включает: определение расстояния между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности для каждой точки проекции, спроецированной на препятствие; определение трехмерных координат точки проекции относительно компонента получения целевого изображения в соответствии с расстоянием между точкой проекции и компонентом получения целевого изображения; и определение информации о контуре препятствия на основе трехмерных координат множества точек проекции на препятствии. Компонент получения целевого изображения представляет собой компонент получения изображения, который получает проекционное изображение точки проекции.
[00102] Иллюстративно, компонент получения изображения содержит объектив и компонент формирования изображения. Излучающий лазер компонент содержит излучающую лазер головку. Для каждой точки проекции, спроецированной на препятствие, компонент обработки, определяющий расстояние между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности, включает: получение заданного расстояния между излучающей лазер головкой излучающего целевой лазер компонента, который проецирует точку проекции, и объективом компонента получения целевого изображения; получение угла сходимости между первой линией соединения и второй линией соединения; получение фокусного расстояния компонента получения целевого изображения; получение положения формирования изображения проекционного изображения на компоненте формирования изображения; и вычисление расстояния между точкой проекции и компонентом получения целевого изображения на основе принципа подобных треугольников в соответствии с заданным расстоянием, углом сходимости, фокусным расстоянием и положением формирования изображения.
[00103] При этом первая линия соединения представляет собой линию соединения между излучающим целевой лазер компонентом и точкой проекции, и вторая линия соединения представляет собой линию соединения между излучающей лазер головкой излучающего целевой лазер компонента и объективом компонента получения целевого изображения.
[00104] Ссылаясь на схематический вид трех точек проекции, проецируемых излучающим целевой лазер компонентом на препятствие, показанный на фиг. 13, для каждой точки проекции (на фиг. 13 в качестве примера используют точку 1 проекции) лазерная головка и объектив компонента получения целевого изображения находятся на второй линии соединения, и заданное расстояние равно s, фокусное расстояние компонента 130 получения изображения равно f, и угол сходимости между первой линией соединения и второй линией соединения равен β. Положение формирования изображения проекционного изображения на компоненте формирования изображения составляет P. Подобные треугольники могут быть созданы с помощью геометрических знаний, а лазерная головка, объектив и точка проекции образуют треугольник. Этот треугольник подобен треугольнику, образованному объективом, Р и вспомогательной точкой Р'.
[00105] Пусть PP'=x, тогда f/x=q/s; таким образом, q=f*s/x.
[00106] При этом x=x1+x2=f/tanβ+ размер пикселя* положение.
[00107] Где размер пикселя является размером пиксельной единицы, и положение является положением пиксельных координат проекционного изображения относительно центра формирования изображения.
[00108] Значение q можно рассчитать по приведенной выше формуле. d=q/sinβ. На основании теоремы косинусов расстояние между точкой проекции и компонентом получения целевого изображения можно рассчитать в соответствии с d, s и β.
[00109] После этого компонент 140 обработки может определить трехмерные координаты точки проекции на основе положения компонента получения целевого изображения. Затем информация о контуре препятствия определяется в соответствии с трехмерными координатами множества точек проекции.
[00110] Необязательно, в этом варианте осуществления множество точек проекции на препятствие включает, но без ограничения, по меньшей мере одно из следующего: множество точек проекции, генерируемых множеством излучающих лазер компонентов, проецирующих лазер на препятствие; множество точек проекции, создаваемых одним и тем же излучающим лазер компонентом, проецирующим лазер на множество поверхностей препятствия; и множество точек проекции, генерируемых излучающим лазер компонентом, проецирующим лазер на препятствие под разными углами, после того как робот-уборщик приводит в движение тот же излучающий лазер компонент.
[00111] Необязательно, компонент 140 обработки, определяющий тип препятствия, указанный информацией о контуре, включает: сравнение информации о контуре препятствия с информацией о характеристиках различных типов препятствий; и определение типа препятствия, соответствующего информации о характеристиках, которая совпадает с информацией о контуре препятствия, такой как тип препятствия, указанный информацией о контуре.
[00112] Среди этого тип препятствия определяется в соответствии с препятствиями, встречающимися в процессе работы робота-уборщика. Иллюстративно, типы препятствий включают, но без ограничения, по меньшей мере одно из следующего: препятствие типа катушка, типа провод, колоннообразного типа, типа внутренний угол, типа внешний угол, порогового типа, край ковра, типа щель и т. п.
[00113] Необязательно, компонент 140 обработки, управляющий роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия, включает: управление роботом-уборщиком для перехода в режим обхода препятствий, когда препятствие представляет собой препятствие типа катушка или типа провод; планирование проходимого маршрута для управления роботом-уборщиком для прохождения через препятствие, когда препятствие представляет собой препятствие колоннообразного типа; управление боковой щеткой на роботе-уборщике для очистки внутреннего угла в определенном режиме движения, когда препятствие представляет собой препятствие типа внутренний угол; управление роботом-уборщиком для уборки вдоль края внешнего угла, когда препятствие представляет собой препятствие типа внешний угол; определение того, может ли робот-уборщик преодолеть препятствие текущего порогового типа, когда препятствие представляет собой препятствие порогового типа; управление силой всасывания вентилятора на роботе-уборщике для увеличения и/или прекращения функции мытья полов и распыления воды, когда тип препятствия представляет собой край ковра или щель.
[00114] При этом конкретный режим перемещения боковой щетки может представлять собой n возвратно-поступательных покачиваний, где n представляет собой положительное целое число.
[00115] Необязательно, когда тип препятствия представляет собой край ковра или щель, если сила всасывания вентилятора робота-уборщика достигла максимального значения и включена функция мытья полов и распыления воды, выполнение функции мытья полов и распыления воды прекращается; если сила всасывания вентилятора робота-уборщика не достигает максимального значения и включена функция мытья полов и распыления воды, сила всасывания вентилятора увеличивается, а выполнение функции мытья полов и распыления воды прекращается; и если всасывание вентилятора робота-пылесоса не достигает максимального значения, а функция мытья полов и распыления воды отключена, всасывание вентилятора увеличивается.
[00116] При этом препятствием колоннообразного типа может быть ножка стола, ножка стула, ножка дивана и т. д. Этот вариант осуществления не ограничивает препятствие колоннообразного типа.
[00117] Разумеется, приведенные выше типы препятствий и соответствующие режимы уборки являются лишь схематичными. В реальной реализации тип препятствия также может соответствовать другим режимам уборки. Соответствующая взаимосвязь между типом препятствия и режимом уборки может быть установлена в роботе-уборщике по умолчанию или может быть установлена пользователем. Этот вариант осуществления не ограничивает способ установки соответствия между типом препятствия и режимом уборки.
[00118] В итоге, посредством предоставления по меньшей мере одного излучающего лазер компонента, расположенного на корпусе; посредством предоставления по меньшей мере одного компонента получения изображения, расположенного на корпусе; посредством обеспечения компонента обработки, соединенного с каждым излучающим лазер компонентом и каждым компонентом получения изображения, и причем компонент обработки выполнен с возможностью получения целевого изображения, собранного компонентом получения изображения; посредством получения информации о контуре препятствия, когда имеется проекционное изображение точки проекции, где лазер проецируется на препятствие на целевом изображении; посредством определения типа препятствия, указанного информацией о контуре; и посредством управления роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия, робот-уборщик, предусмотренный этим вариантом осуществления, может решить проблему, состоящую в том, что существующий робот-уборщик единообразно использует стратегию обхода препятствий при обнаружении препятствия, что приводит к плохому очищающему действию. Поскольку робот-уборщик может использовать различные режимы уборки в соответствии с различными типами препятствий, вместо того, чтобы обходить все препятствия и не убирать, очищающая способность робота-уборщика может быть улучшена.
[00119] На фиг. 14 представлена блок-схема способа автоматического управления роботом-уборщиком, предусмотренным вариантом осуществления настоящего изобретения. Этот вариант осуществления описан на примере того, что способ применяется к роботу-уборщику, показанному в вышеприведенных вариантах осуществления, и субъектом выполнения каждого этапа является компонент 140 обработки в роботе-уборщике. Способ включает по меньшей мере следующие этапы:
[00120] этап 1401: получение целевого изображения, собранного компонентом получения изображения.
[00121] Необязательно, компонент обработки периодически считывает целевое изображение, собранное компонентом получения изображения; или каждый раз, когда компонент получения изображения захватывает целевое изображение, целевое изображение отправляется на компонент обработки.
[00122] этап 1402, получение информации о контуре препятствия, когда имеется проекционное изображение точки проекции, где лазер проецируется на препятствие на целевом изображении.
[00123] Необязательно, для каждой точки проекции, проецируемой на препятствие, расстояние между точкой проекции и компонентом получения целевого изображения определяется на основе триангуляционного способа измерения дальности для каждой точки проекции, проецируемой на препятствие, причем компонент получения целевого изображения представляет собой компонент получения изображения, который получает проекционное изображение точки проекции; определяются трехмерные координаты точки проекции относительно компонента получения целевого изображения в соответствии с расстоянием между точкой проекции и компонентом получения целевого изображения; и определяется информация о контуре препятствия на основе трехмерных координат множества точек проекции на препятствии.
[00124] При этом определение расстояния между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности для каждой точки проекции, спроецированной на препятствие, включает: получение заданного расстояния между излучающей лазер головкой излучающего целевой лазер компонента, который проецирует точку проекции, и объективом компонента получения целевого изображения; получение угла сходимости между первой линией соединения и второй линией соединения, при этом первая линия соединения представляет собой линию соединения между излучающим целевой лазер компонентом и точкой проекции, и вторая линия соединения представляет собой линию соединения между излучающей лазер головкой излучающего целевой лазер компонента и объективом компонента получения целевого изображения; получение фокусного расстояния компонента получения целевого изображения; получение положения формирования изображения проекционного изображения на компоненте формирования изображения; и вычисление расстояния между точкой проекции и компонентом получения целевого изображения на основе принципа подобных треугольников в соответствии с заданным расстоянием, углом сходимости, фокусным расстоянием и положением формирования изображения.
[00125] Описание этапов относится к упомянутым выше вариантам осуществления робота-уборщика, оно не повторяется в этом варианте осуществления.
[00126] этап 1403: определение типа препятствия, указанного информацией о контуре.
[00127] Необязательно, компонент 140 обработки сравнивает информацию о контуре препятствия с информацией о характеристиках различных типов препятствий; и определяет тип препятствия, соответствующий информации о характеристиках, которая совпадает с информацией о контуре препятствия, такой как тип препятствия, указанный информацией о контуре.
[00128] этап 1404, управление роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия.
[00129] Необязательно, когда препятствие представляет собой препятствие типа катушка или типа провод, роботом-уборщиком управляют так, чтобы он перешел в режим обхода препятствий; когда препятствие представляет собой препятствие колоннообразного типа, планируется проходимый маршрут для управления роботом-уборщиком для прохождения через препятствие; когда препятствие представляет собой препятствие типа внутренний угол, боковая щетка на роботе-уборщике управляется для очистки внутреннего угла в определенном режиме движения; когда препятствие представляет собой препятствие типа внешний угол, роботом-уборщиком управляют так, чтобы он убирал вдоль края внешнего угла; когда препятствие представляет собой препятствие порогового типа, определяется, может ли робот-уборщик преодолеть препятствие текущего порогового типа; когда тип препятствия представляет собой край ковра или щель, сила всасывания вентилятора на роботе-уборщике управляется для увеличения.
[00130] Описание этапов относится к упомянутым выше вариантам осуществления робота-уборщика, оно не повторяется в этом варианте осуществления.
[00131] Таким образом, посредством получения целевого изображения, собранного компонентом получения изображения; посредством получения информации о контуре препятствия, когда имеется проекционное изображение точки проекции, где лазер проецируется на препятствие на целевом изображении; посредством определения типа препятствия, указанного информацией о контуре; и посредством управления роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия, способ автоматического управления роботом-уборщиком, предусмотренный этим вариантом осуществления, может решить проблему, состоящую в том, что существующий робот-уборщик единообразно использует стратегию обхода препятствий при обнаружении препятствия, что приводит к плохому очищающему действию. Поскольку робот-уборщик может использовать различные режимы уборки в соответствии с различными типами препятствий, вместо того, чтобы обходить все препятствия и не убирать, очищающая способность робота-уборщика может быть улучшена.
[00132] Необязательно, в настоящем изобретении дополнительно предусмотрен машиночитаемый носитель данных. Программа хранится на машиночитаемом носителе данных. Программа загружается и исполняется процессором для реализации способа автоматического управления роботом-уборщиком согласно описанному выше варианту осуществления способа.
[00133] Необязательно в настоящем изобретении также предусмотрен компьютерный продукт. Компьютерный продукт содержит машиночитаемый носитель данных. Программа хранится на машиночитаемом носителе данных. Программа загружается и исполняется процессором для реализации способа автоматического управления роботом-уборщиком согласно описанному выше варианту осуществления способа.
[00134] Технические признаки описанных выше вариантов осуществления могут произвольно комбинироваться. С целью упрощения описания все возможные комбинации технических признаков в приведенных выше вариантах осуществления не описаны. Однако до тех пор, пока в сочетании этих технических признаков нет противоречий, их следует рассматривать как входящие в объем описания в этом описании.
[00135] Упомянутые выше варианты осуществления представляют собой лишь несколько вариантов осуществления настоящего изобретения, и их описания являются конкретными и подробными, но их не следует рассматривать как ограничение объема этого патента. Следует отметить, что специалистами в данной области техники, не отступая от концепции настоящего изобретения, может быть внесено несколько модификаций и улучшений, которые все относятся к объему правовой охраны настоящего изобретения. Таким образом, объем правовой охраны патента настоящего изобретения будет регулироваться прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО ДАТЧИКА РОБОТА-УБОРЩИКА | 2005 |
|
RU2295704C2 |
| РОБОТ-УБОРЩИК И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2006 |
|
RU2313269C2 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ТАКОВЫМ | 2013 |
|
RU2540058C2 |
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| МОДУЛЬ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ И РОБОТ-УБОРЩИК, ВКЛЮЧАЮЩИЙ В СЕБЯ ТАКОВОЙ | 2013 |
|
RU2591912C1 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ РОБОТА-УБОРЩИКА И АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЭТОГО СПОСОБА | 2005 |
|
RU2283750C1 |
| РОБОТ-УБОРЩИК С ФУНКЦИЕЙ ДЕЗИНФЕКЦИИ ПОЛА | 2004 |
|
RU2272557C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УБОРКИ И СПОСОБ ВОЗВРАТА РОБОТА-УБОРЩИКА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2005 |
|
RU2303387C2 |
Группа изобретений относится к области техники автоматизированной уборки, а именно к роботу-уборщику и способу автоматического управления таким роботом-уборщиком. При этом робот-уборщик содержит: по меньшей мере один излучающий лазер компонент (120) и по меньшей мере один компонент (130) получения изображения, предусмотренные на корпусе (110); и компонент (140) обработки, соединенный с каждым излучающим лазер компонентом (120) и каждым компонентом (130) получения изображения, при этом компонент (140) обработки используется для получения целевого изображения, захваченного компонентом (130) получения изображения. Когда на целевом изображении присутствует проекционное изображение лазера, спроецированное на точку проекции на препятствии, получается информация о контуре препятствия; определяется тип препятствия, указанный информацией о контуре; и робот-уборщик управляется для уборки в соответствии с режимом уборки, соответствующим типу препятствия. При этом режим уборки включает: управление боковой щеткой на роботе-уборщике для очистки внутреннего угла в определенном режиме движения, когда препятствие представляет собой препятствие типа внутренний угол; при этом определенный режим перемещения боковой щетки представляет собой n возвратно-поступательных покачиваний, где n представляет собой положительное целое число; управление роботом-уборщиком для уборки вдоль края внешнего угла, когда препятствие представляет собой препятствие типа внешний угол; управление силой всасывания вентилятора на роботе-уборщике для увеличения и/или прекращения функции мытья полов и распыления воды, когда тип препятствия представляет собой край ковра или щель. Изобретение обеспечивает повышение очищающей способности робота-уборщика, поскольку робот-уборщик способен избирательно использовать разные режимы уборки в зависимости от разных типов препятствий. 9 н. и 2 з.п. ф-лы, 14 ил.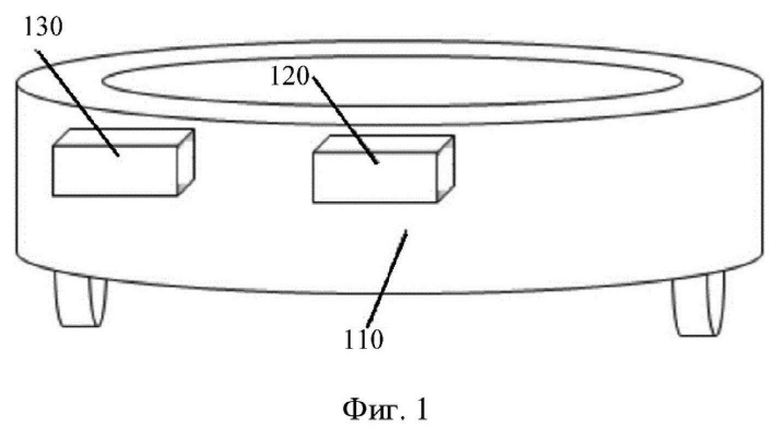
1. Робот-уборщик, содержащий:
корпус;
по меньшей мере один излучающий лазер компонент, расположенный на корпусе, причем каждый излучающий лазер компонент выполнен с возможностью проецирования лазера в направлении перемещения;
по меньшей мере один компонент получения изображения, расположенный на корпусе, причем каждый компонент получения изображения выполнен с возможностью получения целевого изображения в направлении перемещения;
компонент обработки, соединенный с каждым излучающим лазер компонентом и каждым компонентом получения изображения, при этом компонент обработки выполнен с возможностью получения целевого изображения, собранного компонентом получения изображения; при этом, когда имеется проекционное изображение точки проекции, в которой лазер проецируется на препятствие на целевом изображении, получается информация о контуре препятствия; определяется тип препятствия, указанный информацией о контуре; и робот-уборщик управляется для уборки в соответствии с режимом уборки, соответствующим типу препятствия;
отличающийся тем, что режим уборки включает:
управление боковой щеткой на роботе-уборщике для очистки внутреннего угла в определенном режиме движения, когда препятствие представляет собой препятствие типа внутренний угол; при этом определенный режим перемещения боковой щетки представляет собой n возвратно-поступательных покачиваний, где n представляет собой положительное целое число;
управление роботом-уборщиком для уборки вдоль края внешнего угла, когда препятствие представляет собой препятствие типа внешний угол;
управление силой всасывания вентилятора на роботе-уборщике для увеличения и/или прекращения функции мытья полов и распыления воды, когда тип препятствия представляет собой край ковра или щель.
2. Робот-уборщик по п. 1, отличающийся тем, что компонент обработки выполнен с возможностью:
определения расстояния между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности для каждой точки проекции, спроецированной на препятствие, причем компонент получения целевого изображения представляет собой компонент получения изображения, который получает проекционное изображение точки проекции;
определения трехмерных координат точки проекции относительно компонента получения целевого изображения в соответствии с расстоянием между точкой проекции и компонентом получения целевого изображения; и
определения информации о контуре препятствия на основе трехмерных координат множества точек проекции на препятствии.
3. Робот-уборщик по п. 2, отличающийся тем, что компонент получения изображения содержит объектив и компонент формирования изображения, излучающий лазер компонент содержит излучающую лазер головку;
для каждой точки проекции, проецируемой на препятствие, компонент обработки выполнен с возможностью:
получения заданного расстояния между излучающей лазер головкой излучающего целевой лазер компонента, который проецирует точку проекции, и объективом компонента получения целевого изображения;
получения угла сходимости между первой линией соединения и второй линией соединения, при этом первая линия соединения представляет собой линию соединения между излучающим целевой лазер компонентом и точкой проекции, и вторая линия соединения представляет собой линию соединения между излучающей лазер головкой излучающего целевой лазер компонента и объективом компонента получения целевого изображения;
получения фокусного расстояния компонента получения целевого изображения;
получения положения формирования изображения проекционного изображения на компоненте формирования изображения; и
вычисления расстояния между точкой проекции и компонентом получения целевого изображения на основе принципа подобных треугольников в соответствии с заданным расстоянием, углом сходимости, фокусным расстоянием и положением формирования изображения.
4. Робот-уборщик по п. 2, отличающийся тем, что множество точек проекции на препятствии включает:
множество точек проекции, генерируемых множеством излучающих лазер компонентов, проецирующих лазер на препятствие; и/или
множество точек проекции, создаваемых одним и тем же излучающим лазер компонентом, проецирующим лазер на множество поверхностей препятствия; и/или
множество точек проекции, генерируемых излучающим лазер компонентом, проецирующим лазер на препятствие под разными углами, после того как робот-уборщик приводит в движение тот же излучающий лазер компонент.
5. Робот-уборщик по п. 1, отличающийся тем, что компонент обработки дополнительно выполнен с возможностью:
управления роботом-уборщиком для перехода в режим обхода препятствий, когда препятствие представляет собой препятствие типа провод;
определения, может ли робот-уборщик преодолеть препятствие текущего порогового типа, когда препятствие представляет собой препятствие порогового типа.
6. Робот-уборщик по любому из пп. 1-5, отличающийся тем, что углы излучения лазера, излучаемого различными излучающими лазер компонентами, являются одинаковыми или разными.
7. Робот-уборщик по любому из пп. 1-5, отличающийся тем, что объектив компонента получения изображения представляет собой объектив прямого обзора, панорамный отражающий объектив, частично отражающий объектив или перископический объектив.
8. Способ автоматического управления роботом-уборщиком, который применяется в роботе-уборщике по любому из пп. 1-7, при этом способ включает:
получение целевого изображения, собранного компонентом получения изображения;
получение информации о контуре препятствия, когда имеется проекционное изображение точки проекции, спроецированной лазером на препятствие на целевом изображении;
определение типа препятствия, указанного информацией о контуре; и
управление роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия.
9. Способ автоматического управления по п. 8, отличающийся тем, что получение информации о контуре препятствия включает:
определение расстояния между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности для каждой точки проекции, спроецированной на препятствие, при этом компонент получения целевого изображения представляет собой компонент получения изображения, который получает проекционное изображение точки проекции;
определение трехмерных координат точки проекции относительно компонента получения целевого изображения в соответствии с расстоянием между точкой проекции и компонентом получения целевого изображения; и
определение информации о контуре препятствия на основе трехмерных координат множества точек проекции на препятствии.
10. Способ автоматического управления по п. 9, отличающийся тем, что определение расстояния между точкой проекции и компонентом получения целевого изображения на основе триангуляционного способа измерения дальности для каждой точки проекции, спроецированной на препятствие, включает:
получение заданного расстояния между излучающей лазер головкой излучающего целевой лазер компонента, который проецирует точку проекции, и объективом компонента получения целевого изображения;
получение угла сходимости между первой линией соединения и второй линией соединения, при этом первая линия соединения представляет собой линию соединения между излучающим целевой лазер компонентом и точкой проекции, и вторая линия соединения представляет собой линию соединения между излучающей лазер головкой излучающего целевой лазер компонента и объективом компонента получения целевого изображения;
получение фокусного расстояния компонента получения целевого изображения;
получение положения формирования изображения проекционного изображения на компоненте формирования изображения; и
вычисление расстояния между точкой проекции и компонентом получения целевого изображения на основе принципа подобных треугольников в соответствии с заданным расстоянием, углом сходимости, фокусным расстоянием и положением формирования изображения.
11. Способ автоматического управления по п. 8, отличающийся тем, что управление роботом-уборщиком для уборки в соответствии с режимом уборки, соответствующим типу препятствия, включает:
управление роботом-уборщиком для перехода в режим обхода препятствий, когда препятствие представляет собой препятствие типа провод;
управление боковой щеткой на роботе-уборщике для очистки внутреннего угла в определенном режиме движения, когда препятствие представляет собой препятствие типа внутренний угол;
управление роботом-уборщиком для уборки вдоль края внешнего угла, когда препятствие представляет собой препятствие типа внешний угол;
определение, может ли робот-уборщик преодолеть препятствие текущего порогового типа, когда препятствие представляет собой препятствие порогового типа; и
управление силой всасывания вентилятора на роботе-уборщике для увеличения и/или прекращения функции мытья полов и распыления воды, когда тип препятствия представляет собой край ковра или щель.
| EP 3257420 A4, 25.04.2018 | |||
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| CN 106821157 A, 13.06.2017 | |||
| US 20170265703 A1, 21.09.2017 | |||
| EP 2869156 B1, 23.08.2017 | |||
| US 9414731 B2, 16.08.2016. | |||

