ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к технической области создания металлорежущих станков, в частности, к поворотному столу с числовым программным управлением с несколькими степенями свободы.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В настоящее время деталь, представляющая собой монолитный диск с лопатками (блиск), является одной из широко используемых важных деталей в области аэрокосмической промышленности, судостроения, автомобилестроения и т.д., и является одним из основных компонентов ракетных двигателей, авиационных двигателей и т.д. Такой тип деталей характеризуется сложными винтовыми поверхностями, и к изготовлению такой детали предъявляются высокие требования к точности и качеству механической обработки. Как правило, для обработки монолитных дисков с лопатками используются такие станки, как высококлассные пятикоординатные многоцелевые станки, и указанный тип высококлассного пятикоординатного многоцелевого станка обычно оснащен двухкоординатным поворотным столом люлечного типа, конструкция которого включает вращающийся вал. Поворотный стол люлечного типа обычно расположен горизонтально, при этом рабочий стол занимает горизонтальное положение при размещении люльки под углом 0 градусов. В оборудовании, предназначенном для обработки деталей широко используемых монолитных дисков с лопатками и оснащенном обычными поворотными столами, такими как двухосевой поворотный стол с осями АС, двухосевой поворотный стол с осями ВС, одноосевой поворотный стол и т.д., относительные положения контрольных точек системы валов фиксированы. При этом при зажиме монолитного диска с лопатками ось заготовки должна совпадать с осью вращающегося вала, в то время как обрабатываемая область будет находиться на большом расстоянии от оси управляющего вращающегося вала. При обработке монолитного диска с лопатками большого диаметра с использованием пятикоординатного многоцелевого станка с горизонтальным рабочий столом возникает ситуация, при которой положение точки режущей кромки будет находиться на слишком большом расстоянии от системы управляющего вала. При выполнении перемещения станка с функцией RTCP величина коррекции положения линейного вала увеличивается, и, следовательно, это в значительной степени негативно влияет на точность и качество обрабатываемой поверхности. Кроме недостатков управления с точки зрения конструкции поворотный кронштейн поворотного стола располагается горизонтально при обработке монолитных дисков с лопатками большего диаметра, что выдвигает более высокие требования к мощности всего вращающегося вала поворотного кронштейна, а это, в свою очередь, приводит к увеличению габаритов конструкции, увеличению габаритов модели станка, увеличению оперативной зоны поворотного стола и к повышению общей стоимости продукции.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Принимая во внимание вышеуказанные недостатки при создании настоящего изобретения было проведено исследование и был разработан поворотный стол с числовым программным управлением с несколькими степенями свободы. Техническое решение, принятое в настоящем изобретении, излагается ниже.
Поворотный стол с числовым программным управлением с несколькими степенями свободы включает: узел вращения вала В; поворотный узел рабочего стола вала С1; узел вала С2 для вращения рабочего стола; и узел перемещения рабочего стола вала S. Узел вращения вала В включает вращающуюся соединительную площадку и механизм управления мощностью на валу В для приведения в действие вращающуюся соединительную площадку для вращения вокруг оси В; узел вала С2 для вращения рабочего стола включает подвижное основание, рабочий стол и механизм управления мощностью на валу С2 для приведения рабочего стола во вращение вокруг оси С2 на подвижном основании; узел перемещения рабочего стола вала S включает поворотное основание и механизм управления мощностью на валу S; и узел поворота рабочего стола вала С1 включает поворотный кронштейн и механизм управления мощностью на валу С1 для приведения в действие поворотного основания для поворота вокруг оси С1 на поворотном кронштейне, при этом поворотный кронштейн закреплен на вращающейся соединительной площадке, и ось С1 пересекается с осью В. Механизм управления мощностью на валу S позволяет приводить в действие подвижное основание для перемещения по оси S на поворотном основании, обеспечивая подвод обрабатываемого участка заготовки к точке пересечения оси С1 и оси В. При этом, ось S перпендикулярна оси С1.
При этом, ось С1 и ось В перпендикулярны друг другу, и вал В, вал С1 и линейный вал станка совместно выполняют пятикоординатное перемещение с функцией RTCP (контроль положения центра инструмента).
Кроме того, узел перемещения вала рабочего стола вала S включает направляющую вала S, расположенную на поворотном основании, и механизм управления мощностью на валу S позволяет приводить в движение подвижное основание по направляющей вала S.
При этом, узел вращения вала В установлен на подвижном основании по оси X станка; вал В перпендикулярен оси X и оси Z станка; поворотный кронштейн включает основание поворотного кронштейна и секторный поворотный кронштейн; секторный поворотный кронштейн и основание поворотного кронштейна соединены вместе и образуют L-образную конструкцию; основание поворотного кронштейна закреплено на вращающейся соединительной площадке; секторная поверхность секторного поворотного кронштейна снабжена дугообразной направляющей вала С1 для обеспечения дополнительной опоры поворотного основания; секторная поверхность секторного поворотного кронштейна параллельна оси В; и верхняя поверхность рабочего стола параллельна оси В.
При этом, ось В является вертикальной осью; секторная поверхность секторного поворотного кронштейна представляет собой вертикальную поверхностью; ось С1 и ось С2 являются горизонтальными осями; и верхняя поверхность рабочего стола является вертикальной поверхностью.
Кроме того, дугообразная часть секторного поворотного кронштейна обращена в сторону, противоположную режущему инструменту.
При этом, механизм управления мощностью на валу В и механизм управления мощностью на валу С2 представляют собой силовые механизмы, непосредственно приводимые в движение высокомоментным электродвигателем; механизм управления мощностью на валу С1 представляет собой серводвигатель, сопряженный с беззазорной конструкцией двухступенчатой зубчатой передачи; и механизм управления мощностью на валу S представляет собой механизм винтового стержня серводвигателя.
По сравнению с предшествующим уровнем техники поворотный стол с числовым программным управлением с несколькими степенями свободы настоящего изобретения обладает следующими преимуществами:
1. Настоящее изобретение позволяет изменить форму двухосевого поворотного стола, используемого в традиционном пятикоординатном многоцелевом станке, обеспечивает совместное управление системой из четырех валов, выбор вала С1 и вала В в качестве системы валов для выполнения движения с функцией RTCP, и дополняет систему валом С1 и валом S таким образом, чтобы точка режущей кромки режущего инструмента находилась на максимально близком расстоянии к оси, участвующей в выполнении движения с функцией RTCP в процессе ротационной обработки, и при этом, чтобы положение точки режущей кромки находилось на максимально близком расстоянии к пятикоординатному управляющему валу или совпадала с ним таком образом, чтобы при вовлечении в движение положения точки режущей кромки координаты линейных осей изменялись в меньшей степени, диапазон коррекции линейных осей был меньше, эффективность обработки была выше, а качество поверхности и точность обработки в меньшей степени завесили от точности линейного вала.
2. Путем регулирования положения деталей с помощью системы валов обеспечивается обработка детали большего размера в ограниченной оперативной зоне станка, таким образом, настоящее изобретение позволяет снизить стоимость оборудования при обеспечении точности обработки деталей большего размера, в большей степени соответствует характеристикам деталей, таких как монолитный диск с лопаткам, имеющий сложные криволинейные поверхности, и таким образом, удовлетворяет производственным потребностям.
3. По сравнению с традиционной горизонтальной конструкцией поворотного стола вертикальная конструкция поворотного стола в большей степени подходит для обработки деталей со сложными криволинейными поверхностями, такими как монолитные диски с лопаткам, и, путем сопряжения с горизонтальным многоцелевым станком такая конструкция позволяет обрабатывать монолитные диски с лопаткам из различных металлов, таких как жаропрочный сплав и нержавеющая сталь, и выполнять токарную, фрезерную, сверлильную, расточную, резьбонарезную и другую обработку за один зажим.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
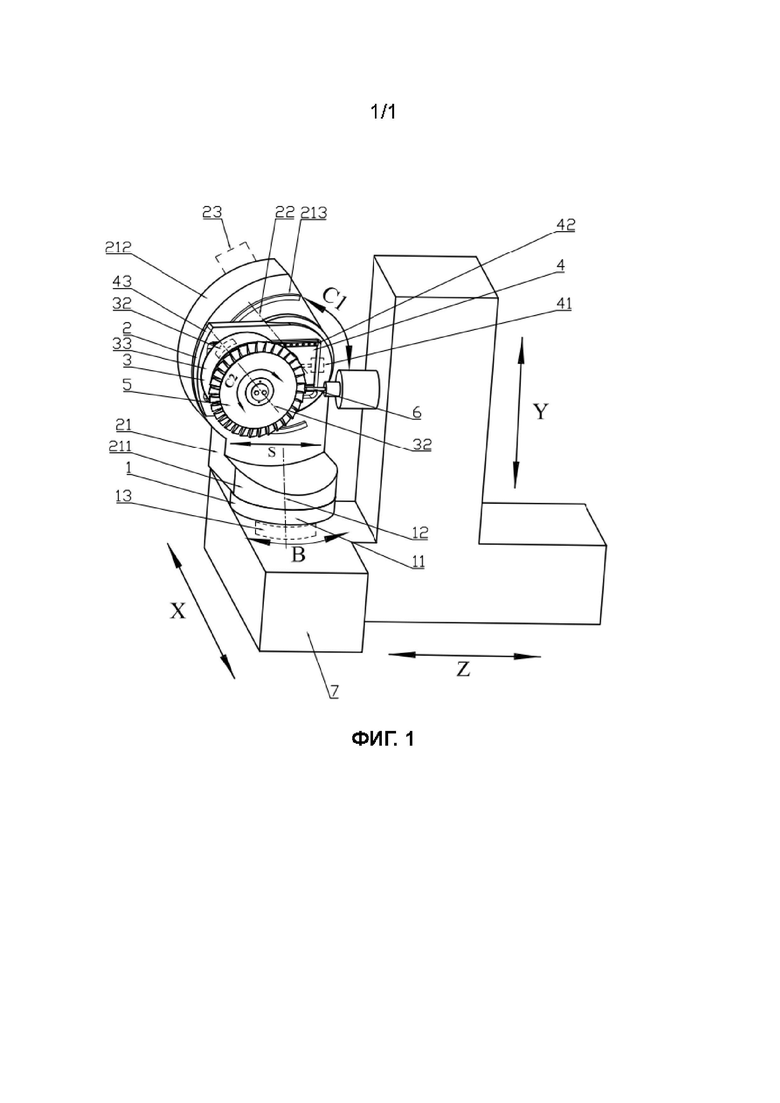
ФИГ. 1 - принципиальная схема конструкции варианта осуществления настоящего изобретения.
На чертеже указаны:
1. Узел вращения вала В.
11. Вращающаяся соединительная площадка.
12. Ось В.
13. Механизм управления мощностью на валу В.
2. Узел поворота рабочего стола вала С1.
21. Поворотный кронштейн.
211. Основание поворотного кронштейна.
212. Секторный поворотный кронштейн.
213. Дугообразный рельс.
22. Ось С1.
23. Механизм управления мощностью на валу С1.
3. Узел вала С2 для вращения рабочего стола вала С2.
31. Ось С2.
32. Механизм управления мощностью на валу С2.
33. Подвижное основание.
4. Узел вала S для поворота рабочего стола.
41. Механизм управления мощностью на валу.
42. Направляющий рельс вала S.
43. Поворотное основание;
5. Заготовка.
6. Режущий инструмент.
7. Станина.
X. Перемещение в направлении по оси X.
Y. Перемещение в направлении по оси Y.
Z. Перемещение в направлении по оси Z.
В. Направление вращения вала В.
С1. Направление поворота вала С1.
С2. Направление вращения вала С.
S. Направление вращения вала S.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Как показано на ФИГ. 1, поворотный стол с числовым программным управлением с несколькими степенями свободы включает в себя узел вращения 1 вала В, узел 2 поворота рабочего стола вала С1, узел 3 вращения рабочего стола вала С2 и узел 4 перемещения рабочего стола вала S. Узел вращения 1 вала В включает вращающуюся соединительную площадку 11 и механизм 13 управления мощностью на валу В для вращения вращающейся соединительной площадки 11 вокруг оси В 12; узел вращения 3 рабочего стола вала С2 включает подвижное основание 33, рабочий стол и механизм 32 управления мощностью на валу С2 для приведения рабочего стола во вращение вокруг оси С2 31 на подвижном основании 33; узел 4 перемещения рабочего стола вала S включает поворотное основание 43 и механизм 41 управления мощностью на валу S для перемещения рабочего стола по оси S на поворотном основании 43; узел 2 поворота рабочего стола вала С1 включает поворотный кронштейн 21 и механизм 23 управления мощностью на валу С1 для привода поворотного основания 43 для поворота на поворотном кронштейне 21 вокруг оси С1 22, причем ось С1 22 пересекает ось В 12; и механизм 41 управления мощностью на валу S может приводить в движение подвижное основание 33 для перемещения по оси S на поворотном основании 43, приближая обрабатываемый участок заготовки к точке пересечения оси С1 и оси В, при этом ось S является осью в направлении вала S. Станок с числовым программным управлением соединен с поворотным кронштейном 21 посредством узла вращения 1 вала В, при этом обрабатываемая заготовка (в данном варианте осуществления - монолитный диск с лопатками 5) зажимается на рабочем столе на подвижном основании 33. В частности, вал В, вал С1 и линейный вал станка совместно выполняют пятикоординатное перемещение с функцией RTCP (контроль положения центра инструмента); вал С1 представляет собой систему поворотных вращающихся валов рабочего стола, вал В представляет собой систему управляющих валов для вращательного движения каждого компонента всей вертикальной части, вал С2 представляет собой систему валов вращательного движения рабочего стола, вал S указывает положение перемещения рабочего стола и используется для регулировки положения рабочего стола относительно оси С1 и оси В таким образом, чтобы точка режущей кромки режущего инструмента находилась на максимально близком расстоянии к оси, участвующей в выполнении движения с функцией RTCP, или совпадала с ней таким образом, чтобы при вовлечении вала в движение координаты линейного вала изменялись в меньшей степени, эффективность обработки была выше, а качество поверхности и точность обработки в меньшей степени завесили от точности линейного вала. Путем регулирования положения деталей с помощью системы валов обеспечивается обработка детали большего размера в ограниченной оперативной зоне станка; таким образом, настоящее изобретение позволяет снизить стоимость оборудования при обеспечении точности обработки деталей большего размера, в большей степени соответствует характеристикам деталей, таких как монолитный диск с лопатками, имеющий сложные криволинейные поверхности, и таким образом удовлетворяет производственные потребности.
В предпочтительном варианте ось S перпендикулярна плоскости, в которой расположены ось С1 22 и ось В12, при этом ось С1 22 и ось В12 перпендикулярны друг другу.
На поворотном основании 43 имеется направляющий рельс 42 вала S, узел 3 вала С2 вращения рабочего стола соединен с поворотным основанием 43 посредством направляющего рельса 42 вала S и соединен с механизмом 41 управления мощностью на валу S, при этом монолитный диск 5 с лопатками, узел 3 вала С2 вращения рабочего стола, направляющий рельс 42 вала S и механизм 41 управления мощностью на валу S установлены на поворотном основании 43. Узел 3 вала С2 для вращения рабочего стола приводит в движение монолитный диск 5 с лопатками для выполнения круговой индексации на 360° посредством механизма 32 управления мощностью на валу С2. Узел 3 вала С2 для вращения рабочего стола, обеспечивающий зажим монолитного диска 5 с лопатками, способен перемещаться по направлению вала посредством механизма 41 управления мощностью на валу S в направлении рельса 42 вала S.
Ось В 12 является вертикальной осью, ось S, ось С1, ось С1 22 и ось С2 31 являются горизонтальными осями, и поворотный кронштейн 21 включает основание 211 поворотного кронштейна и секторный поворотный кронштейн 212, закрепленный на основании поворотного кронштейна 211, секторный поворотный кронштейн 212 и основание поворотного кронштейна 211 соединены вместе и образуют цельную L-образную конструкцию, основание поворотного кронштейна 211 закреплено на вращающейся соединительной площадке 12, механизм 13 управления мощностью на валу В приводит основание поворотного кронштейна 211 во вращение, на секторной поверхности секторного поворотного кронштейна 212 предусмотрен дугообразный рельс 213 вала С1 для создания дополнительной опоры поворотного основания 43 таким образом, чтобы поворотное основание 43 могло поворачиваться вдоль секторного профиля секторного поворотного кронштейна 212. При обработке монолитных дисков с лопатками большого диаметра вертикальная конструкция поворотного кронштейна уменьшает оперативную зону, уменьшает предельный угол поворота, уменьшает ширину поворотного стола, снижает требования к управлению мощностью вращающегося вала, уменьшает ширину используемого станка и снижает стоимость станка, при этом секторный поворотный кронштейн 212 дополнительно уменьшает оперативную зону. В данном варианте осуществления настоящего изобретения дугообразная часть секторного поворотного кронштейна 212 обращена в сторону от режущего инструмента 6, ось В 12 параллельна секторной поверхности секторного поворотного кронштейна 212, и секторная поверхность секторного поворотного кронштейна 212 параллельна оси В 12, то есть, ось В 12 является центром вращения основания 211 поворотного кронштейна, а между осью В 12 и секторным поворотным кронштейном 212 имеется расстояние, которое может быть задано по кромке основания 211 поворотного кронштейна таким образом, чтобы при установке заготовки на рабочем столе обрабатываемый участок заготовки мог достигнуть соответствующего положения оси В 12.
В данном варианте осуществления настоящего изобретения узел вращения вала В установлен на подвижном основании по оси X станка, ось В перпендикулярна осям X и Z станка, а ось В параллельна оси Y станка. В частности, ось В 12 является вертикальной осью, секторная поверхность секторного поворотного кронштейна 212 является вертикальной поверхностью, как ось С1 22, так и ось С2 31 являются горизонтальными осями, и поверхность рабочего стола является вертикальной поверхностью.
В механизме управления мощностью 13 на валу В и механизме управления мощностью 32 на валу С2 высокомоментный электродвигатель непосредственно приводит в действие силовые механизмы, сопряженные с энкодером (силовой механизм также может быть выполнен в виде механического турбинного червяка, кулачково-роликового механизма и т.д.) для достижения преимуществ, заключающихся в высокой точности, высокой стабильности, компактной механической конструкции и т.д. В силовом механизме для обеспечения поворотного движения вала поворота, ввиду того, что вал поворота должен приводить в движение большой вес и учитывая его большой момент инерции вращения, механизм управления мощностью 23 на валу С1 выполнен в виде серводвигателя, сопряженного с беззазорной конструкцией двойной зубчатой передачи и с энкодером (силовой механизм также может быть выполнен в виде двигателя прямого привода, шатунного механизма, винтового стержня и т.д.). Использование серводвигателя и беззазорной конструкции двухступенчатой зубчатой передачи позволяет уменьшить размер пространства, повышая при этом крутящий момент на выходе для обеспечения работы вала поворота. В данном варианте осуществления настоящего изобретения механизм управления мощностью 23 на валу С1 расположен на секторном поворотном кронштейне, при этом механизм управления мощностью 23 вала С1 и поворотное основание 43 расположены позади и спереди секторного поворотного кронштейна 212 соответственно; механизм управления мощностью 41 вала S выполнен в виде винтового стержня серводвигателя и энкодера (силовой механизм также может быть выполнен в виде гидроцилиндра, электрического цилиндра, линейного электродвигателя и т.д.), что позволяет полностью использовать преимущества самоблокировки и высокой жесткости винтового стержня серводвигателя для достижения точного регулирования длины хода. Силовой механизм безредукторного моментного двигателя, серводвигатель, сопряженный с беззазорной конструкцией двухступенчатой зубчатой передачи, и принцип построения самого механизма винтового стержня серводвигателя известны из предшествующего уровня техники и не рассматриваются в данном документе.
В соответствии с данным вариантом осуществления настоящего изобретения в пятикоординатном многоцелевом станке используются ось X, ось Y, ось Z, вал В и вал С1 для совместного выполнения пятикоординатного перемещения с функцией RTCP, вал С1 обеспечивает управление поворотом для приведения рабочего стола в действие для совершения поворота вокруг оси С1 22, вал С2 используется в качестве делительного вала рабочего стола, вал S используется в качестве вала регулировки положения рабочего стола, что позволяет отрегулировать положение рабочего стола относительно оси С1 22. В данном варианте осуществления настоящего изобретения при обработке заготовки обрабатываемый участок заготовки подводят на минимальное расстояние к оси С1 22 и оси В 12 или обрабатываемый участок совмещают с указанными осями. Например, наружные кромки монолитного диска с лопатками, являющегося обрабатываемой заготовкой, представляют собой сложные криволинейные поверхности. Путем регулировки положения узла 3 вала С2 для вращения рабочего стола и путем регулировки высоты зажима монолитного диска с лопатками обрабатываемый участок внешних кромок подводят на максимально близкое расстояние к оси С1 22 и оси В 12 или совмещают с указанными осями в процессе механической обработки таким образом, чтобы точка режущей кромки режущего инструмента находилась на максимально близком расстоянии от оси С1 22 и оси В 12, обеспечивающих выполнение пятикоординатного перемещения с функцией RTCP в процессе механической обработки. В данном варианте осуществления настоящего изобретения ось С1 22 и ось В 12 являются компланарными. При выполнении перемещения с функцией RTCP система числового программного управления обеспечивает незначительную коррекцию отклонения системы валов, что повышает точность механической обработки.
Вышеприведенные варианты осуществления служат исключительно для описания предпочтительных вариантов осуществления настоящего изобретения и не ограничивают объем настоящего изобретения. Без отступления от конструктивной сущности настоящего изобретения, различные модификации и усовершенствования, выполненные специалистами в данной области техники в отношении технического решения настоящего изобретения, подпадают под объем охраны, определяемый формулой настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВОЙ СТАНОК ДЛЯ ОБРАБОТКИ МОНОЛИТНОГО ДИСКА С ЛОПАТКАМИ | 2020 |
|
RU2823036C1 |
| ШПИНДЕЛЬНАЯ ГОЛОВКА С ИЗМЕНЯЕМЫМ УГЛОМ РАСПОЛОЖЕНИЯ ШПИНДЕЛЯ | 2020 |
|
RU2836764C1 |
| КОНСТРУКЦИЯ ШАРНИРНОЙ ПОВОРОТНОЙ ГОЛОВКИ | 2020 |
|
RU2836766C1 |
| ШПИНДЕЛЬНАЯ ГОЛОВКА С ИЗМЕНЯЕМЫМ УГЛОМ РАСПОЛОЖЕНИЯ ШПИНДЕЛЯ | 2020 |
|
RU2836816C1 |
| КОМПРЕССОР И СИСТЕМА ОХЛАЖДЕНИЯ МАСЛА | 2010 |
|
RU2561807C2 |
| МОБИЛЬНАЯ СИСТЕМА ОСМОТРА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2007 |
|
RU2378641C2 |
| ДВУХПОВОРОТНАЯ УГЛОВАЯ ШПИНДЕЛЬНАЯ ГОЛОВКА | 2020 |
|
RU2837224C1 |
| СПОСОБ УСТАНОВКИ И СПОСОБ ИЗВЛЕЧЕНИЯ ИНСТРУМЕНТА ИЗ ПОВОРОТНОЙ ШПИНДЕЛЬНОЙ ГОЛОВКИ | 2020 |
|
RU2837223C1 |
| ПЯТИОСЕВАЯ ВЕРТИКАЛЬНАЯ ОБРАБАТЫВАЮЩАЯ СИСТЕМА С АВТОМАТИЧЕСКОЙ ЗАГРУЗКОЙ И ВЫГРУЗКОЙ | 2020 |
|
RU2836770C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ПОЗИЦИОНИРОВАНИЯ ШАРОВЫХ ЭЛЕМЕНТОВ | 2019 |
|
RU2752259C1 |
Изобретение относится к области станкостроения и может быть использовано в конструкциях поворотных столов с несколькими степенями свободы, имеющих числовое программное управление. Стол включает узел вращения вала В, узел вала С1 поворота рабочего стола, узел вала С2 для вращения рабочего стола и узел вала S перемещения рабочего стола. Узел вращения вала В включает вращающуюся соединительную площадку и механизм управления мощностью на валу В, узел вала С2 включает подвижное основание, рабочий стол и механизм управления мощностью на валу С2, узел вала S включает поворотное основание и механизм управления мощностью на валу S, а узел вала С1 включает поворотный кронштейн и механизм управления мощностью на валу С1, при этом ось С1 пересекается с осью В. Механизм управления мощностью на валу S приводит в действие подвижное основание для перемещения по оси S на поворотном основании для подвода обрабатываемого участка заготовки к точке пересечения оси С1 и оси В. Кроме того, ось S расположена перпендикулярно оси C1, ось C1 и ось B расположены перпендикулярно друг другу, а вал B совместно с валом C1 выполнены с возможностью выполнения пятикоординатного перемещения с функцией RTCP. Использование изобретения позволяет повысить точность и качество обработки. 1 з.п. ф-лы, 1 ил.
1. Поворотный стол с числовым программным управлением, содержащий:
- узел вращения вала B, включающий в себя вращающуюся соединительную площадку и механизм управления мощностью на валу В для приведения вращающейся соединительной площадки во вращение вокруг оси В,
- узел вала С2 для вращения рабочего стола, включающий в себя подвижное основание, рабочий стол и механизм управления мощностью на валу С2 для приведения рабочего стола во вращение вокруг оси С2 относительно подвижного основания,
- узел вала S перемещения рабочего стола, включающий в себя поворотное основание, направляющий рельс вала S, расположенный на поворотном основании, и механизм управления мощностью на валу S, при этом механизм управления мощностью на валу S выполнен с возможностью приведения в действие подвижного основание для перемещения по направляющему рельсу вала S относительно поворотного основания,
- узел вала С1 поворота рабочего стола, включающий в себя поворотный кронштейн и механизм управления мощностью на валу С1 для приведения в действие поворотного основания для поворота вокруг оси С1 на поворотном кронштейне, при этом поворотный кронштейн закреплен на вращающейся соединительной площадке, ось С1 пересекается с осью В, а механизм управления мощностью на валу S выполнен с возможностью подвода обрабатываемого участка заготовки к точке пересечения оси С1 и оси В,
- при этом ось S расположена перпендикулярно оси С1, ось С1 и ось В расположены перпендикулярно друг другу, а вал В совместно с валом С1 выполнены с возможностью выполнения пятикоординатного перемещения с функцией RTCP,
- причем поворотный кронштейн включает в себя основание поворотного кронштейна и секторный поворотный кронштейн, которые соединены между собой с образованием L-образной конструкции, а основание поворотного кронштейна закреплено на вращающейся соединительной площадке, секторная поверхность секторного поворотного кронштейна снабжена дугообразной направляющей вала С1 с возможностью обеспечения дополнительной опоры поворотного основания, при этом секторная поверхность секторного поворотного кронштейна расположена параллельно оси В, а верхняя поверхность рабочего стола параллельна оси В,
- причем ось В, секторная поверхность секторного поворотного кронштейна и верхняя поверхность рабочего стола расположены вертикально, а ось С1 и ось С2 расположены горизонтально.
2. Поворотный стол по п. 1, отличающийся тем, что механизм управления мощностью на валу В и механизм управления мощностью на валу С2 выполнены в виде силовых механизмов, приводимых в действие высокомоментным электродвигателем, при этом механизм управления мощностью на валу С1 выполнен в виде серводвигателя, соединенного с беззазорной двухступенчатой зубчатой передачей, а механизм управления мощностью на валу S выполнен в виде механизма винтового стержня серводвигателя.
| CN 103084854 A, 08.05.2013 | |||
| Оптический профилешлифовальный станок | 1975 |
|
SU604247A1 |
| CN 103143789 A, 12.06.2013 | |||
| CN 102310354 A, 11.01.2012 | |||
| CN 107932096 A, 20.04.2018 | |||
| US 5349900 A1, 27.09.1994. | |||

