ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к области техники токарной обработки, в частности, к двухповоротной угловой шпиндельной головке.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
[0002] В последние годы пятикоординатный горизонтальный обрабатывающий центр находит все более широкое применение в высокотехнологичных отраслях промышленности, таких как аэрокосмическая, оборонная и военная, благодаря своей высокой точности, высокой жесткости, высокой эффективности и пятиосевой шарнирно-рычажной системе. В основном пятикоординатный горизонтальный обрабатывающий центр используется для обработки высокоточных деталей со сложным профилем, таких как детали конструкций аэрокосмической техники.
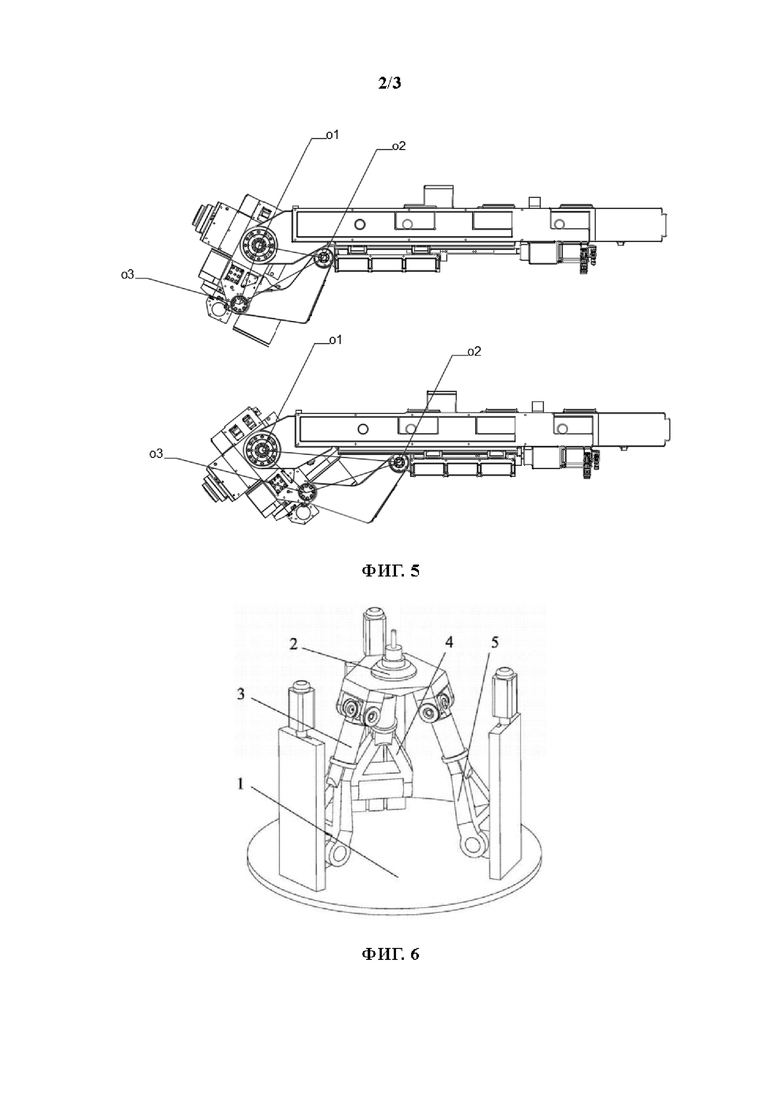
[0003] Однако, в связи с тем, что в настоящее время пятикоординатный горизонтальный обрабатывающий центр используется для обработки деталей со сложным профилем, выполненных из таких металлов, как алюминиевый сплав и титановый сплав, интенсивность съема материала составляет более 90%. Как показано на ФИГ. 6, существует необходимость в повышении жесткости, крутящего момента и точности двухповоротной фрезерной головки предшествующего уровня техники, кроме того, фрезерная головка обладает крайне большим объемом, низкими динамическими характеристиками, а диапазон угла поворота не позволяет полностью удовлетворить нужды производства в механической обработке.
[0004] Известная фрезерная и поворотная головка выполнена в виде параллельной конструкции из трех кулачков. Исходя из предшествующего уровня техники, в шпиндельной головке Sprint Z3 с параллельной кинематикой производства немецкой компании DST используется 3-звенный шарнирный механизм параллельного перемещения. 3-звенный шарнирный механизм параллельного перемещения состоит из трех подвижных устройств, разнесенных на 120° и приводимых в движение тремя серводвигателями с помощью шариковинтовых пар соответственно. Приводимые в движение шариковинтовыми парами подвижные пластины перемещаются по линейным направляющим на основании, при этом движущиеся подвижные пластины толкают поворотные стержни, и затем подвижная платформа приводится в движение посредством универсального шарнира таким образом, чтобы главный вал на подвижной платформе мог перемещаться в направлении оси Z и отклоняться в направлениях оси А и оси В, при этом шпиндельная головка может поворачиваться в пределах сектора ±40°. Несмотря на то, что механизмы предшествующего уровня техники успешно применяются для обработки сложных деталей с пространственно криволинейными поверхностями, они все же обладают такими недостатками, как большой общий объем и вес, при этом три разветвленные цепи имеют идентичную конструкцию и симметричное расположение, что приводит к сильному сцеплению при перемещении механизма и усложняет управление.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0005] Настоящее изобретение предусматривает создание двухповоротной угловой шпиндельной головки для решения вышеуказанных технических проблем.
[0006] Двухповоротная угловая шпиндельная головка в соответствии с настоящим изобретением включает поворотный вал оси А, поворотную конструкцию оси В, шпиндельную головку, линейный механизм выдвижения-втягивания, ползун и каретку, в которой поворотная конструкция оси В включает вращающий вал оси В, первый вращающий вал, второй вращающий вал, поворотный шатун, механизм выдвижения-втягивания оси В и корпус; в которой механизм выдвижения-втягивания оси В включает в себя тягово-толкающую пластину оси В и приводную конструкцию оси В; тягово-толкающая подвижная пластина оси В расположена над ползуном, один конец тягово-толкающей подвижной пластины оси В подвижно соединен с одним концом поворотного шатуна посредством первого поворотного вала, другой конец поворотного шатуна подвижно соединен с корпусом посредством второго поворотного вала, и приводная конструкция оси В приводит тягово-толкающую подвижную пластину оси В в движение для линейного перемещения вдоль ползуна; шпиндельная головка размещена в корпусе, ось шпиндельной головки пересекает перпендикулярно ось поворотного вала оси В; корпус подвижно соединен с передним концом ползуна посредством поворотного вала оси В; поворотный вал оси А соединен со шпиндельной головкой с помощью фланца; ось поворотного вала оси А и ось поворотного вала оси В расположены в одной плоскости; каретка расположена под ползуном, и линейный механизм выдвижения-втягивания расположен на каретке; линейный механизм выдвижения-втягивания приводит ползун в линейное движение по каретке.
[0007] При этом один конец подвижной тягово-толкающей пластины оси В шарнирно соединен с одним концом поворотного шатуна посредством первого поворотного вала; другой конец поворотного шатуна шарнирно соединен с корпусом посредством второго поворотного вала; и корпус шарнирно соединен с передним концом ползуна посредством поворотного вала оси В.
[0008] При этом ось первого поворотного вала расположена между вторым вращающим валом оси В и вторым вращающим валом, и при достижении корпуса до предельного диапазона от -35° до +35° вокруг поворотного вала оси В значение угла наименьшего внутреннего угла треугольника, образованного осями поворотного вала оси В, первого поворотного вала и второго поворотного вала, составляет не менее 30°.
[0009] Кроме того, шпиндельная головка может поворачиваться в пределах угла при вершине в диапазоне от -45° до +45° по отношению к оси поворотного вала оси А, при этом шпиндельная головка может поворачиваться вокруг оси поворотного вала оси В в пределах угла при вершине в диапазоне от -35° до +35°.
[0010] При этом механизм выдвижения-втягивания оси В, линейный механизм выдвижения-втягивания, поворотный вал оси А соединены с приводным двигателем, представляющим собой серводвигатель.
[0011] При этом каретка перемещается вверх и вниз.
[0012] В настоящем изобретении поворотный вал оси А соединен со шпиндельной головкой с помощью фланца таким образом, чтобы обеспечивался поворот шпиндельной головки в направлении оси X; посредством комбинации первого поворотного вала, второго поворотного вала, поворотного вала оси В, поворотного шатуна и корпуса и под действием тягово-толкающего усилия механизма выдвижения-втягивания оси В шпиндельная головка может поворачиваться в направлении оси Y; под действием линейного механизма выдвижения-втягивания линейное перемещение подачи осуществляется между ползуном и кареткой, и при этом шпиндельная головка может выдвигаться и втягиваться в направлении оси Z таким образом, чтобы обеспечилось увеличение степени подвижности шпиндельной головки, повышение жесткости, крутящего момента и точности шпиндельной головки при одновременном снижении объема и массы оборудования шпиндельной головки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] В целях более наглядной иллюстрации вариантов осуществления настоящего изобретения или технических решений в предшествующем уровне техники ниже кратко представлены прилагаемые чертежи, которые необходимо использовать при описании вариантов осуществления настоящего изобретения или предшествующего уровня техники. На прилагаемых чертежах в нижеприведенном описании проиллюстрированы некоторые варианты осуществления настоящего изобретения, и для специалистов в данной области техники должно быть очевидно, что другие чертежи также могут быть созданы на основании прилагаемых чертежей без приложения творческих усилий.
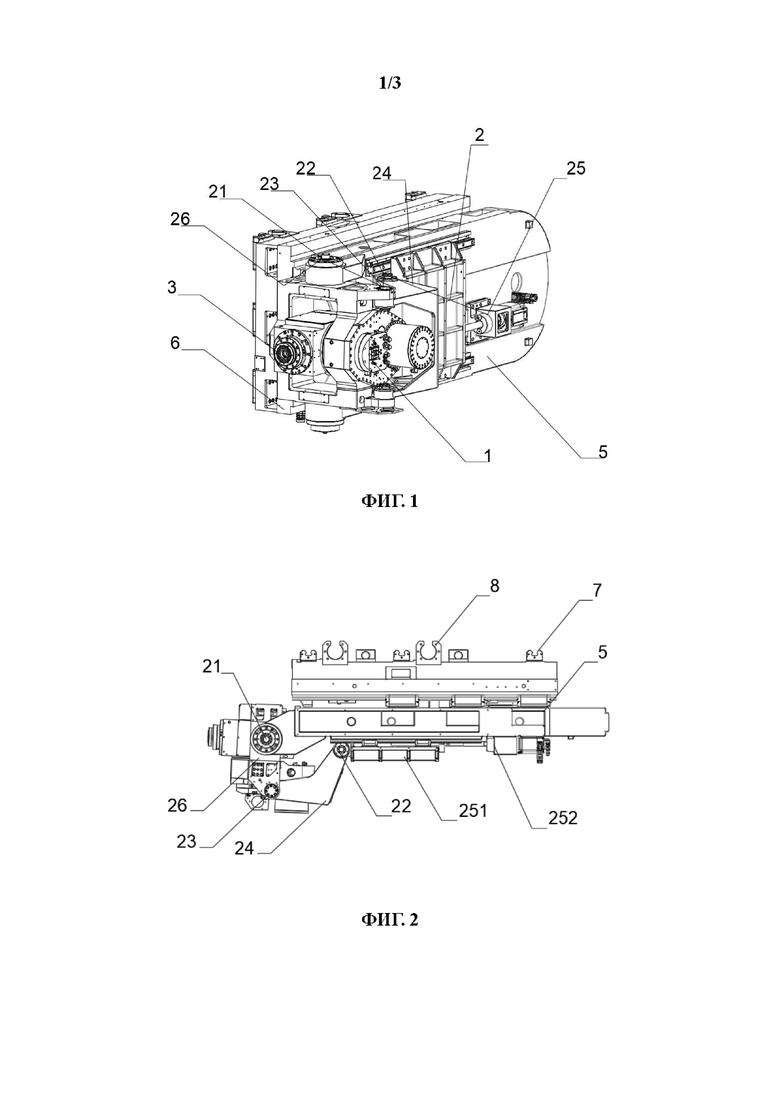
ФИГ. 1 блок-схема общей конструкции двухповоротной угловой шпиндельной головки в соответствии с настоящим изобретением;
ФИГ. 2 вид сбоку двухповоротной угловой шпиндельной головки в соответствии с настоящим изобретением;
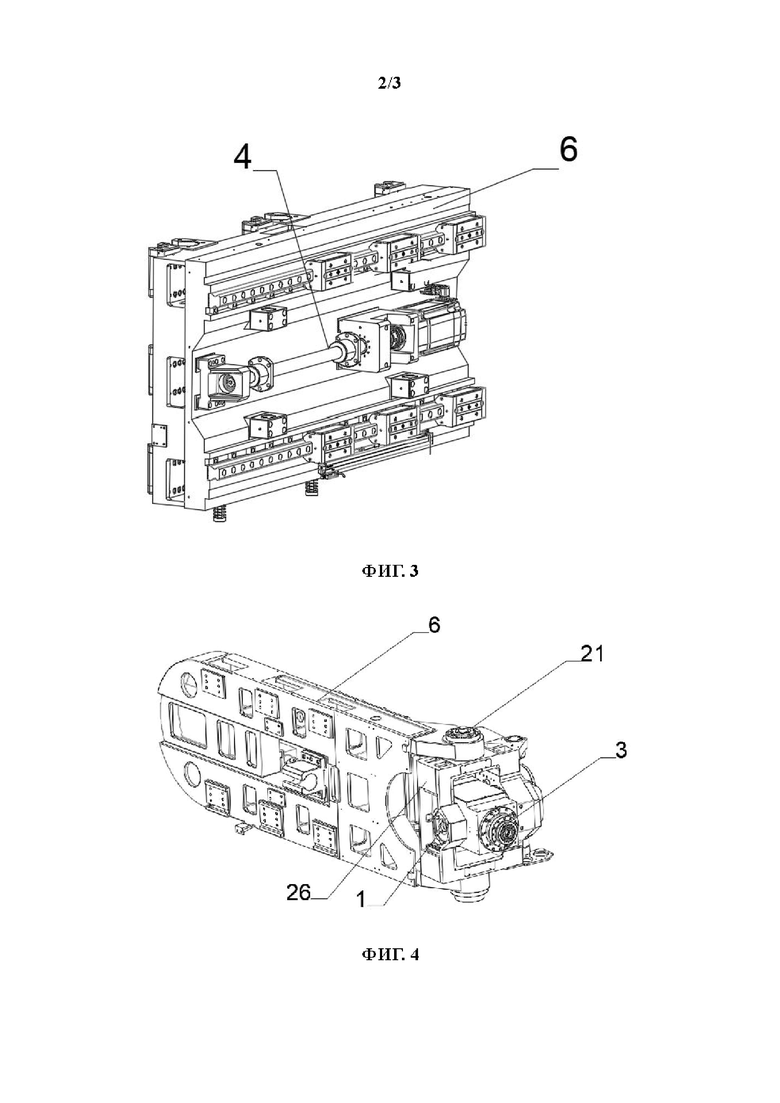
ФИГ. 3 блок-схема каретки в соответствии с настоящим изобретением;
ФИГ. 4 блок-схема копланарного состояния оси поворотного вала по оси А и оси поворотного вала по оси В в соответствии с настоящим изобретением;
ФИГ. 5 - блок-схема настоящего изобретения, на которой корпус достигает предельного диапазона от -35° до +35° вокруг оси поворотного вала по оси В;
ФИГ. 6 - блок-схема конструкции двухповоротной угловой шпиндельной головки в соответствии с предшествующим уровнем техники.
Перечень ссылочных позиций
[0014]
1 поворотный вал по оси А
2 поворотная конструкция по оси В
3 шпиндельная головка
4 линейный механизм выдвижения-втягивания
5 ползун
6 каретка
7 соединительная конструкция рельсовых направляющих
8 конструкция винтового соединения
21 вращающий вал оси В
22 первый вращающий вал
23 второй вращающий вал
24 поворотный шатун
25 механизм выдвижения-втягивания по оси В
26 корпус
251 тягово-толкающая подвижная пластина по оси В
252 приводная конструкция по оси В
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0015] Для того, чтобы сделать цели, технические решения и преимущества вариантов осуществления настоящего изобретения более понятными, нижеследующее четко и полностью описывает технические решения в вариантах осуществления со ссылкой на прилагаемые чертежи вариантов осуществления настоящего изобретения. Очевидно, что описываемые варианты осуществления являются некоторыми, но не всеми вариантами осуществления настоящего изобретения. Все остальные варианты осуществления, разработанные специалистами в данной области техники без творческих усилий на основе вариантов осуществления настоящего изобретения, находятся в пределах объема охраны настоящего изобретения.
[0016] Двухповоротная угловая шпиндельная головка в соответствии с настоящим изобретением включает: поворотный вал 1 оси А, поворотную конструкцию 2 оси В, шпиндельную головку 3, линейный механизм выдвижения-втягивания 4, ползун 5 и каретку 6, в которой поворотная конструкция 2 оси В включает вращающий вал 21 оси В, первый вращающий вал 22, второй вращающий вал 23, поворотный шатун 24, механизм выдвижения-втягивания 25 оси В, корпус 26, в которой механизм выдвижения-втягивания 25 оси В включает тягово-толкающую подвижную пластину 251 и приводную конструкцию 252 оси В; в котором тягово-толкающая подвижная пластина 251 оси В расположена над ползуном 5, один конец тягово-толкающей подвижной пластины 251 оси В подвижно соединен с одним концом поворотного шатуна 24 посредством первого поворотного вала 22, другой конец поворотного шатуна 24 подвижно соединен с корпусом 26 посредством второго поворотного вала 23, приводная конструкция 252 оси В приводит тягово-толкающую подвижную пластину 251 оси В в линейное перемещение вдоль ползуна 5; шпиндельная головка 3 размещена в корпусе 26, ось шпиндельной головки 3 пересекается перпендикулярно с осью поворотного вала 21 оси В; корпус 26 подвижно соединен с передним концом ползуна 5 посредством поворотного вала 21 оси В; поворотный вал 1 оси А соединен со шпиндельной головкой 3 с помощью фланца; ось поворотного вала 1 оси А и ось поворотного вала 21 оси В лежат в одной плоскости; каретка 6 расположена под ползуном 5, линейный механизм выдвижения-втягивания 4 расположен на каретке 6; линейный механизм выдвижения-втягивания 4 приводит ползун 5 в линейное движение по каретке 6.
[0017] В частности, как показано на ФИГ. 1, вращающий вал 21 оси В расположен в горизонтальном направлении устройства, вращающий вал 21 оси В, первый вращающий вал 22, второй вращающий вал 23, поворотный шатун 24, механизм выдвижения-втягивания 25 оси В, корпус 26 образуют поворотную конструкцию 2 оси В, в которой механизм выдвижения-втягивания 25 оси В состоит из тягово-толкающей пластины 251 оси В и приводной конструкции 252 оси В, при этом первый вращающий вал 22, второй вращающий вал 23, вращающий вал 21 оси В и поворотный шатун 24 вместе образуют кривошипно-шатунный механизм, корпус 26 подвижно соединен с ползуном 5 посредством поворотного вала 21 оси В, на приводной конструкции 252 оси В размещена тягово-толкающая подвижная пластина 251 оси В, тягово-толкающая подвижная пластина 251 оси В может линейно перемещаться вдоль ползуна 5 под действием приводной конструкции 252 оси В таким образом, чтобы обеспечивался одновременный поворот первого поворотного вала 22, второго поворотного вала 23 и поворотного вала 21 оси В, тем самым приводя корпус и расположенную внутри шпиндельную головку 3 в движение с поворотом вверх и вниз. В процессе осуществления поворота по оси В необходимо контролировать траекторию для сохранения симметрии во избежание увеличения хода вала ползуна 5, вызванного эксцентриситетом шпиндельной головки и поворотного вала 21 оси В, что может еще больше увеличить вылет ползуна, тем самым приводя к снижению общей жесткости.
[0018] Как показано на ФИГ. 1, поворотный вал 1 оси А размещен в продольном направлении устройства. Поворотный вал 1 оси А соединен со шпиндельной головкой 3 с помощью фланца, при этом вращение поворотного вала 1 оси А приводит шпиндельную головку 3 в движение с поворотом влево и вправо.
[0019] Как показано на ФИГ. 3, под действием линейного механизма выдвижения-втягивания 4 ползун 5 совершает линейное движение подачи вдоль каретки 6.
[0020] Как показано на ФИГ. 4, в данном варианте осуществления ось шпиндельной головки 3 и ось поворотного вала 21 оси В пересекаются перпендикулярно, в противном случае вращающий вал 21 оси В приводит шпиндельную головку 3 к асимметричному повороту, в результате чего сторона с меньшим углом поворачивается быстрее, в то время как сторона с большим углом поворачивается медленнее. С целью достижения одинаковых параметров обработки с обеих сторон ползун необходимо выдвигать и втягивать вдоль оси Z. При таком расположении данного варианта осуществления настоящего изобретения вращающий вал 21 оси В приводит шпиндельную головку 3 в движение с поворотом для выполнения симметричного поворота и вращается с одинаковой скоростью, при этом гарантируется, что при вращении шпиндельной головки 3 величина выдвижения и втягивания ползуна вдоль оси Z всегда сохраняется одинаковой, вследствие этого обеспечивается более рациональная компоновки всего станка, повышение жесткости и точности шпиндельной головки 3 и экономия пространства.
[0021] При этом один конец тягово-толкающей подвижной пластины 251 оси В шарнирно соединен с одним концом поворотного шатуна 24 посредством первого поворотного вала 22; другой конец поворотного шатуна 24 шарнирно соединен с корпусом 26 посредством второго поворотного вала 23; и корпус 26 шарнирно соединен с передним концом ползуна 5 посредством поворотного вала 21 оси В.
[0022] В частности, как показано на ФИГ. 2, кривошипно-шатунный механизм, состоящий из первого поворотного вала 22, второго поворотного вала 23, поворотного вала 21 оси В и поворотного шатуна 24, имеет шарнирную конструкцию, способную эффективно противостоять усилию сдвига и осевому усилию, что позволяет предотвратить вероятное деформирование поворотного шатуна 24, снизить износ подшипника, тем самым удлиняя срок службы поворотной конструкции 2 оси В.
[0023] При расположении корпусом 26 в крайних положениях диапазона его поворота от -35° до +35° вокруг оси поворотного вала 21 оси В значение угла наименьшего внутреннего угла треугольника с вершинами шарнирных точках O1, O2 и О3, расположению осей поворотного вала вала 21 оси В, первого поворотного вала 22 и второго поворотного вала 23, составляет не менее 30°.
[0024] В частности, как показано на ФИГ. 5, расстояние перемещения тягово-толкающей подвижной пластины 251 по оси В составляет от 300 мм до 350 мм, при котором корпус 6 достигает предельного диапазона от -35° до +35° вокруг поворотного вала оси В. Оси поворотного вала 21 оси В, первого поворотного вала 22 и второго поворотного вала 23 могут образовывать три вершины треугольника, а наименьший острый угол в треугольнике составляет не менее 30 градусов. Расстояние А от шарнирной точки О2 до шарнирной точки О3 является постоянным. Чем больше значение А, тем лучше, если позволяет пространство конструкции. Расстояние от шарнирной точки O1 до шарнирной точки О2 изменяется при повороте оси В, при этом расстояния между двумя крайними положениями являются переменными В и С, соответственно. Независимо от крайнего положения или промежуточного положения механической обработки три точки O1, О2 и О3 образуют треугольник.. В данном варианте осуществления значение угла минимального внутреннего угла треугольника составляет не менее 30 градусов, тем самым ограничивая эквивалентные длины шатунов нескольких механических конструкций и контролируя их в разумных пределах.
[0025] Кроме того, шпиндельная головка 3 может поворачиваться в пределах угла при вершине от -45° до +45° относительно оси поворотного вала 1 оси А, при этом шпиндельная головка 3 может поворачиваться вокруг оси поворотного вала 21 оси В в пределах угла при вершине от -35° до +35°.
[0026] В частности, диапазон угла поворота стандартных фрезерных головок по осям АВ в промышленности в основном находится в пределах от -30° до +30°, что не может полностью удовлетворить нужды производств в механической обработке. Как показано на ФИГ. 1, корпус шпиндельной головки для ее фиксации может быть расположен снаружи шпиндельной головки 3, поворотный вал 1 оси А и вращающий вал оси В соответственно соединены с корпусом шпиндельной головки, коробка шпиндельной головки и корпус 26 аксиально соединены вдоль поворотного вала 1 оси А, и корректная установка ширины проема корпуса 26 для установки коробки шпиндельной головки позволяет ограничить амплитуду поворота шпиндельной головки, приводимой в движение поворотным валом 1 оси А относительно оси поворотного вала 1 оси А таким образом, чтобы поворот оси А находился в диапазоне -45°~+45°; угол, на который вращающий вал 21 оси В приводит шпиндельную головку 3 в движение, определяется кривошипно-шатунным механизмом, состоящим из первого поворотного вала 22, второго поворотного вала 23, поворотного вала 21 оси В и поворотного шатуна 24, и при приведении механизмом выдвижения-втягивания 25 оси В кривошипно-шатунного механизма в движение по прямой линии расстояние перемещения тягово-толкающей подвижной пластины 251 оси В составляет от 300 мм до 350 мм, при котором поворотный корпус оси В может поворачиваться вокруг поворотного вала оси В в диапазоне угла -35°~+35°. Такая конструкция позволяет сэкономить пространство и одновременно расширить диапазон фрезерных операций.
[0027] При этом механизм выдвижения-втягивания 25 оси В, линейный механизм выдвижения-втягивания 4 и поворотный вал 1 оси А соединены с приводным двигателем, представляющим собой серводвигатель.
[0028] В частности, как показано на ФИГ. 1 и ФИГ. 3, механизм выдвижения-втягивания 25 оси В, линейный механизм выдвижения-втягивания 4 и поворотный вал 1 оси А приводятся в действие и управляются серводвигателем, при этом серводвигатель соединен с механизмом выдвижения-втягивания 25 оси В и прецизионной шарико-винтовой парой на линейном механизме выдвижения-втягивания 4 с помощью подшипниковой муфты для передачи осевого крутящего момента таким образом, чтобы механизм выдвижения-втягивания 25 оси В и линейный механизм выдвижения-втягивания 4 обеспечивали передачу тяги линейного перемещения. Серводвигатель способен обеспечить регулирование с обратной связью положения, скорости и крутящего момента в плане точности, с частотой вращения от 2000 до 3000 об/мин, и при этом он обладает преимуществами, заключающимися в сильной антиперегрузочной способности, стабильной работе на низкой скорости, кратковременном динамическом отклике в отношении разгона и торможения, низком тепловыделении и шуме, и т.д., что является приемлемым с точки зрения соответствия требованиям, предъявляемым к заявке настоящего изобретения.
[0029] Как показано на ФИГ. 2, каретка 6 снабжена соединительной конструкцией 7 в виде рельсовой направляющей и винтовой соединительной конструкцией 8 относительно торца, соединяющего линейный механизм выдвижения-втягивания 4, которые могут быть использованы для соединения линейного механизма выдвижения-втягивания 4 и подключения силового устройства для осуществления движения вверх и вниз с целью максимизации объема и функции шпиндельной головки.
[0030] Наконец, следует отметить, что приведенные выше варианты осуществления настоящего изобретения используются исключительно для иллюстрации технических решений настоящего изобретения и не предназначены для его ограничения. Несмотря на то, что настоящее изобретение было подробно описано со ссылкой на приведенные выше варианты осуществления, специалистам в данной области техники должно быть очевидно, что в технические решения, описанные в приведенных выше вариантах осуществления, могут быть внесены изменения, либо технические признаки могут быть частично или полностью эквивалентно заменены. Однако указанные изменения или смены не приведут к тому, что сущность соответствующих технических решений выйдет за пределы объема технических решений вариантов осуществления настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОПАСТНОЕ КОЛЕСО С ОДНИМ ОБОДОМ ДЛЯ ВЕТРОТУРБИННОЙ ГЕНЕРАТОРНОЙ УСТАНОВКИ | 2015 |
|
RU2687546C2 |
| ШПИНДЕЛЬНАЯ ГОЛОВКА С ИЗМЕНЯЕМЫМ УГЛОМ РАСПОЛОЖЕНИЯ ШПИНДЕЛЯ | 2020 |
|
RU2836816C1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ КОМБАЙН | 2020 |
|
RU2753306C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| ШПИНДЕЛЬНАЯ ГОЛОВКА С ИЗМЕНЯЕМЫМ УГЛОМ РАСПОЛОЖЕНИЯ ШПИНДЕЛЯ | 2020 |
|
RU2836764C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ КРЕСЛО-КОЛЯСКА | 2018 |
|
RU2767548C1 |
| Базовая станция, роботизированная система чистки и способ ее управления | 2020 |
|
RU2785339C1 |
| КОНСТРУКЦИЯ ШАРНИРНОЙ ПОВОРОТНОЙ ГОЛОВКИ | 2020 |
|
RU2836766C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Привод подачи фрезерного станка для обработки вафельной конструкции обечайки | 2024 |
|
RU2824782C1 |
Изобретение относится к области станкостроения и может быть использовано в конструкциях двухповоротных угловых шпиндельных узлов. В шпиндельном узле поворотный вал оси А соединен со шпиндельной головкой посредством фланца на торцевой поверхности для осуществления поворота по оси А, при этом кривошипно-шатунный механизм, состоящий из первого вращающего вала, второго вращающего вала, вращающего вала оси В и поворотного шатуна, осуществляет поворот оси В под воздействием механизма выдвижения-втягивания оси В. При воздействии линейного механизма выдвижения-втягивания осуществляется перемещение по линейной оси ползуна относительно каретки и соответствующие повороты шпиндельной головки. Использование изобретения обеспечивает расширение технологических возможностей узла и увеличение точности установки шпиндельной головки при одновременном снижении ее габаритов и массы. 2 з.п. ф-лы, 6 ил.
1. Двухповоротный шпиндельный узел, содержащий:
каретку (6), на которой расположен ползун (5) с возможностью линейного перемещения по каретке (6) посредством линейного механизма (4) выдвижения-втягивания, установленного на каретке (6),
корпус (26), шарнирно соединенный с возможностью поворота по оси В с передним концом ползуна (5) посредством поворотного вала (21) по оси В,
шпиндельную головку (3), размещенную в корпусе (26) с возможностью поворота вокруг продольной оси А посредством поворотного вала (1) по оси А, который соединен со шпиндельной головкой (3) посредством фланца,
поворотную конструкцию (2) по оси В, которая включает в себя поворотный шатун (24) и механизм (25) выдвижения-втягивания по оси В, выполненный в виде тягово-толкающей подвижной пластины (251) по оси В, расположенной на ползуне (5) с возможностью линейного перемещения по ползуну (5) посредством соединенной с одним из ее концов приводной конструкции (252) по оси В, причем
другой конец тягово-толкающей подвижной пластины (251) по оси В шарнирно соединен с возможностью перемещения с одним из концов поворотного шатуна (24) посредством первого поворотного вала (22), а другой конец поворотного шатуна (24) шарнирно соединен с возможностью перемещения с корпусом (26) посредством второго поворотного вала (23), при этом
продольная ось шпиндельной головки (3) перпендикулярно пересекается с осью поворотного вала (21) по оси В, ось поворотного вала (1) по оси А и ось поворотного вала (21) по оси В лежат в одной плоскости, а
при расположении корпуса (26) в крайних положениях диапазона его поворота от -35° до +35° вокруг поворотного вала (21) по оси В величина наименьшего внутреннего угла треугольника с вершинами в шарнирных точках O1, O2 и О3, соответствующих расположению осей поворотного вала (21) по оси В, первого поворотного вала (22) и второго поворотного вала (23), составляет не менее 30°.
2. Двухповоротный шпиндельный узел по п. 1, в котором шпиндельная головка (3) установлена с возможностью поворота вокруг оси поворотного вала (1) по оси А в пределах диапазона от -45° до +45°.
3. Двухповоротный шпиндельный узел по п. 1, в котором механизм (25) выдвижения-втягивания по оси В, линейный механизм (4) выдвижения-втягивания и поворотный вал (1) по оси А выполнены с приводом в виде серводвигателя.
| CN 110052882 A, 26.07.2019 | |||
| МНОГОЦЕЛЕВОЙ СТАНОК | 2013 |
|
RU2554829C1 |
| ДВУХПОВОРОТНАЯ ШПИНДЕЛЬНАЯ ГОЛОВКА ДЛЯ СТАНКОВ | 2001 |
|
RU2267392C2 |
| Станок с поворотной инструментальной головкой | 1978 |
|
SU774825A1 |
| CN 104607957 A, 13.05.2015 | |||
| CN 103659402 A, 26.03.2014. | |||

