Перекрестная ссылка на родственную заявку
В настоящем раскрытии испрашивается приоритет заявки на патент Китая № 202010536391.4, озаглавленной «WAREHOUSE ROBOT CONTROL METHOD AND APPARATUS, ROBOT, AND WAREHOUSE SYSTEM» и поданной 12 июня 2020 года в патентное ведомство Китая, раскрытие которой включено сюда во всей своей полноте путем ссылки.
Область техники, к которой относится изобретение
Настоящее раскрытие относится, в общем, к области интеллектуальных складских технологий и, в частности, к способу и устройству управления складским роботом, роботу и складской системе.
Уровень техники
Складские роботы используют интеллектуальные операционные системы, реализуют автоматический захват и хранение товаров с помощью системных инструкций и могут непрерывно работать в течение 24 часов, заменяя ручное управление и работу и повышая эффективность складирования, и, таким образом, широко используются и развиваются.
Однако существующая интеллектуальная складская система может реализовать только автоматический захват и хранение стандартных контейнеров с полностью соответствующими стандартами, что приводит к необходимости для пользователя покупать или арендовать стандартные контейнеры и производить упаковку товаров и другие операции при хранении товаров, что увеличивает стоимость и количество этапов обработки и ухудшает восприятие пользователя. Между тем, это также приводит к диапазону применения интеллектуальной складской системы.
Сущность изобретения
Варианты осуществления настоящего раскрытия предоставляют способ и устройство управления складским роботом, робота и складскую систему. Для различных типов контейнеров на основе алгоритмов распознавания положения реализовано автоматическое получение позиции положений различных типов контейнера, и повышена эффективность работы склада и диапазон применения складского робота.
Согласно первому аспекту вариант осуществления настоящего раскрытия предусматривает способ управления складским роботом, включающий в себя:
получение инструкции планирования контейнера для первого целевого контейнера, где инструкция планирования контейнера включает в себя тип контейнера первого целевого контейнера; определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера; и управление складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении.
При необходимости определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера включает в себя:
предварительное установление соответствия между типом контейнера и алгоритмом распознавания положения контейнера; и определение алгоритма распознавания положения контейнера для первого целевого контейнера с учетом соответствия и типа контейнера первого целевого контейнера.
При необходимости в соответствии с особенностью поверхности, тип контейнера делится по меньшей мере на одно из следующего: тип гладкой поверхности, тип вогнутой и выпуклой поверхности и тип идентификационного рисунка на поверхности; или в соответствии с особенностью размера тип контейнера делится по меньшей мере на одно из следующего: большой контейнер, стандартный контейнер и маленький контейнер; или в соответствии с особенностью материала тип контейнера делится по меньшей мере на одно из следующего: бумажный контейнер и пластиковый контейнер.
При необходимости алгоритм определения позиции контейнера в соответствии с типом контейнера включает в себя:
определение того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа гладкой поверхности, когда тип контейнера первого целевого контейнера является типом гладкой поверхности; и, соответственно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения типа гладкой поверхности включает в себя: получение изображения облака точек и заданного опорного изображения первого целевого контейнера; регистрацию изображения облака точек и заданного опорного изображения; и определение информации о положении первого целевого контейнера в соответствии с результатом регистрации.
При необходимости определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера включает в себя:
определение того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа вогнутой и выпуклой поверхности, когда тип контейнера первого целевого контейнера является типом вогнутой и выпуклой поверхности; и, соответственно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения типа вогнутой и выпуклой поверхности включает в себя: распознавание вогнутых и выпуклых частей поверхности первого целевого контейнера; и определение информации о положении первого целевого контейнера в соответствии с физической информацией о вогнутой и выпуклой частях, где физическая информация содержит одно или несколько из: длины, ширины, высоты, глубины, угла и контура вогнутой и выпуклой частей и количества вогнутых и выпуклых частей.
При необходимости определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера включает в себя:
определение того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа идентификатора на поверхности, когда тип контейнера первого целевого контейнера является типом идентификационного рисунка на поверхности; и, соответственно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения типа идентификатора на поверхности включает в себя: распознавание идентификационного рисунка первого целевого контейнера; и определение информации о положении первого целевого контейнера в соответствии с позицией идентификационного рисунка.
При необходимости, перед распознаванием информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера, способ дополнительно включает в себя:
распознавание информации идентификации местоположения склада целевого местоположения склада, соответствующего первому целевому контейнеру; и, соответственно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера включает в себя: если информация идентификации местоположения склада распознана успешно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера.
При необходимости инструкция планирования контейнера дополнительно включает в себя информацию о положении контейнера первого целевого контейнера, и, перед определением алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера, способ дополнительно включает в себя:
перемещение складского робота в целевую позицию и перемещение захватного устройства складского робота на заданную высоту в соответствии с информацией о положении контейнера.
При необходимости тип контейнера первого целевого контейнера является типом бумажного контейнера, и управление захватным устройством складского робота для захвата первого целевого контейнера включает в себя:
получение инструкции захвата бумажного контейнера; управление захватным устройством складского робота для захвата первого целевого контейнера в соответствии с инструкцией захвата бумажного контейнера; где инструкция захвата бумажного контейнера включает в себя инструкцию захвата на первой стадии и инструкцию захвата на второй стадии; скорость захвата позиции захвата на первой стадии меньше скорости захвата позиции захвата на второй стадии; первая стадия соответствует стадии, когда захватное устройство не касается первого целевого контейнера; и вторая стадия соответствует стадии, когда захватное устройство касается первого целевого контейнера.
При необходимости управление складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении включает в себя:
определение позиционного отношения между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении; перемещение и/или поворот складского робота в соответствии с позицией; и управление захватным устройством складского робота для захвата первого целевого контейнера.
При необходимости информация о положении включает в себя расстояние между первым целевым контейнером и складским роботом и информацию о размере и информацию о позиции положения первого целевого контейнера; инструкция планирования контейнера дополнительно включает в себя стандартный размер первого целевого контейнера; и определение позиционного отношения между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении включает в себя:
определение того, существует ли первый целевой контейнер в соответствии с расстоянием; если да, определение того, является ли первый целевой контейнер допустимым в соответствии со стандартным размером и информацией о размере первого целевого контейнера; и, если да, определение позиционного отношения между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении.
При необходимости, после перемещения и/или поворота складского робота в соответствии с позицией, способ дополнительно содержит:
получение расстояния захвата между складским роботом и первым целевым контейнером; определение того, удовлетворяет ли расстояние захвата условию подъема складского робота; и если да, управление захватным устройством складского робота для захвата первого целевого контейнера.
При необходимости способ управления складским роботом дополнительно включает в себя:
получение инструкции сохранения контейнера для второго целевого контейнера, где инструкция сохранения контейнера содержит позицию местоположения, относящуюся к местоположению склада хранения, соответствующему второму целевому контейнеру, и второй целевой контейнер расположен на захватном устройстве складского робота; перемещение складского робота в позицию хранения второго целевого контейнера в соответствии с позицией местоположения склада; получение идентификационной информации о местоположении склада, относящейся к местоположению склада хранения; определение второго позиционного отношения между складским роботом и местоположением склада хранения в соответствии с идентификационной информации о местоположении склада, относящейся к местоположению склада хранения; перемещение и/или поворот складского робота в соответствии со вторым позиционным отношением; определение того, существует ли третий контейнер на складе хранения; и, если нет, сохранение второго целевого контейнера на складе хранения.
Согласно второму аспекту раскрытие дополнительно предусматривает устройство управления складским роботом, включающее в себя:
модуль получения инструкции планирования, выполненный с возможностью получения инструкции планирования контейнера первого целевого контейнера, где инструкция планирования контейнера содержит тип контейнера первого целевого контейнера; модуль распознавания положения контейнера, выполненный с возможностью определения алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавания информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера; и модуль захвата контейнера, выполненный с возможностью управления складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении.
При необходимости модуль распознавания положения контейнера включает в себя:
блок установления соответствия, выполненный с возможностью предварительного установления соответствия между типом контейнера и алгоритмом распознавания положения контейнера; блок определения алгоритма распознавания положения, выполненный с возможностью определения алгоритма распознавания положения контейнера для первого целевого контейнера с учетом соответствия и типа контейнера первого целевого контейнера; и блок распознавания положения контейнера, выполненный с возможностью распознавания информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера.
При необходимости, в соответствии с элементом поверхности тип контейнера делится по меньшей мере на одно из следующего: тип гладкой поверхности, тип вогнутой и выпуклой поверхности и тип идентификационного рисунка на поверхности; в соответствии с особенностью размера тип контейнера делится по меньшей мере на одно из следующего: большой контейнер, стандартный контейнер и маленький контейнер; и в соответствии с особенностью материала тип контейнера делится по меньшей мере на одно из следующего: бумажный контейнер и пластиковый контейнер.
При необходимости блок определения алгоритма распознавания положения дополнительно выполнен с возможностью:
определения того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа гладкой поверхности, когда тип контейнера первого целевого контейнера является типом гладкой поверхности; и, соответственно, блок распознавания положения контейнера дополнительно выполнен с возможностью: получения изображения облака точек и заданного опорного изображения первого целевого контейнера; регистрации изображения облака точек и заданного опорного изображения; и определения информации о положении первого целевого контейнера в соответствии с результатом регистрации.
При необходимости блок определения алгоритма распознавания положения дополнительно выполнен с возможностью:
определения того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа вогнутой и выпуклой поверхности, когда тип контейнера первого целевого контейнера является типом вогнутой и выпуклой поверхности; и, соответственно, блок распознавания положения контейнера дополнительно выполнен с возможностью: распознавания вогнутых и выпуклых частей поверхности первого целевого контейнера; и определения информации о положении первого целевого контейнера в соответствии с физической информацией о вогнутой и выпуклой частях, где физическая информация содержит одно или несколько из: длины, ширины, высоты, глубины, угла и контура вогнутой и выпуклой частей и количества вогнутых и выпуклых частей.
При необходимости блок определения алгоритма распознавания положения дополнительно выполнен с возможностью:
определения того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа идентификатора на поверхности, когда тип контейнера первого целевого контейнера является типом идентификационного рисунка на поверхности; и, соответственно, блок распознавания положения контейнера дополнительно выполнен с возможностью: распознавания идентификационного рисунка первого целевого контейнера; и определения информации о положении первого целевого контейнера в соответствии с положением идентификационного рисунка.
При необходимости устройство управления складским роботом дополнительно включает в себя:
модуль распознавания идентификатора товарной полки, выполненный с возможностью распознавания информации идентификации местоположения склада целевого местоположения склада, соответствующего первому целевому контейнеру, перед распознаванием информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера; и, соответственно, модуль распознавания положения контейнера дополнительно выполнен с возможностью определения алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавания информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера, если информация идентификации местоположении склада успешно распознана.
При необходимости инструкция планирования контейнера дополнительно включает в себя информацию о положении контейнера первого целевого контейнера, и устройство управления складским роботом дополнительно включает в себя:
модуль перемещения робота, выполненный с возможностью перемещения складского робота в целевую позицию и перемещения захватного устройства складского робота на заданную высоту в соответствии с информацией о положении контейнера перед определением алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера.
При необходимости модуль захвата контейнера включает в себя:
блок определения позиционного отношения, выполненный с возможностью определения позиционного отношения между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении; блок перемещения робота, выполненный с возможностью перемещения и/или поворота складского робота в соответствии с позицией; и блок захвата контейнера, выполненный с возможностью управления захватным устройством складского робота для захвата первого целевого контейнера.
При необходимости тип контейнера первого целевого контейнера является типом бумажного контейнера, и блок захвата контейнера дополнительно выполнен с возможностью:
получения положении захвата бумажного контейнера; управления захватным устройством складского робота для захвата первого целевого контейнера в соответствии с инструкцией захвата бумажного контейнера; где инструкция захвата бумажного контейнера включает в себя инструкцию захвата на первой стадии и инструкцию захвата на второй стадии; скорость захвата позиции захвата на первой стадии меньше скорости захвата позиции захвата на второй стадии; первая стадия соответствует стадии, когда захватное устройство не касается первого целевого контейнера; и вторая стадия соответствует стадии, когда захватное устройство касается первого целевого контейнера.
При необходимости информация о положении включает в себя расстояние между первым целевым контейнером и складским роботом, и информацию о размере и информацию о положении для первого целевого контейнера; инструкция планирования контейнера дополнительно включает в себя стандартный размер первого целевого контейнера; и блок определения позиционного отношения дополнительно выполнен с возможностью:
определения того, существует ли первый целевой контейнер в соответствии с расстоянием; если да, определить то, является ли первый целевой контейнер допустимым в соответствии со стандартным размером и информацией о размере первого целевого контейнера; и если да, определить позиционное отношение между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении.
При необходимости устройство управления складским роботом дополнительно включает в себя:
модуль определения расстояния, выполненный с возможностью получения расстояния захвата между складским роботом и первым целевым контейнером после перемещения и/или поворота складского робота в соответствии с отношением позиции; определения того, удовлетворяет ли расстояние захвата условию подъема складского робота; и, соответственно, блок захвата контейнера дополнительно выполнен с возможностью управления захватным устройством складского робота для захвата первого целевого контейнера, если расстояние захвата удовлетворяет условию захвата складского робота.
При необходимости устройство управления складским роботом дополнительно включает в себя:
модуль управления размещением товаров, выполненный с возможностью получения инструкции сохранения контейнера для второго целевого контейнера, где инструкция сохранения контейнера включает в себя позицию местоположения, относящуюся к местоположению склада хранения, соответствующему второму целевому контейнеру, и второй целевой контейнер расположен на захватном устройстве складского робота; перемещения складского робота в позицию хранения второго целевого контейнера в соответствии с позицией местоположения склада; получения идентификационной информации о местоположении склада, относящейся к местоположению склада хранения; определения второго позиционного отношения между складским роботом и местоположением склада хранения в соответствии с идентификационной информации о местоположении склада, относящейся к местоположению склада хранения; перемещения и/или поворота складского робота в соответствии со вторым позиционным отношением; определения того, существует ли третий контейнер на складе хранения; и если нет, сохранения второго целевого контейнера на складе хранения.
Согласно третьему аспекту раскрытие дополнительно предусматривает складской робот, который включает в себя: память и по меньшей мере один процессор; память, хранящую исполняемую компьютером инструкцию; по меньшей мере один процессор исполняет исполняемую компьютером инструкцию, хранящуюся в памяти, так что по меньшей мере один процессор выполняет способ управления складским роботом, предусмотренный любым вариантом осуществления настоящего раскрытия.
Согласно четвертому аспекту раскрытие дополнительно предусматривает складскую систему, которая включает в себя складской робот, предусмотренный вариантом осуществления, соответствующим третьему аспекту раскрытия, товарную полку и модуль управления складом, где складской робот подключен к модулю управления складом и выполнен с возможностью перемещения в позицию целевого контейнера в соответствии с инструкцией модуля управления складом, и захвата и/или хранения целевого контейнера, где целевой контейнер размещается на товарной полке, и захватывается целевой контейнер.
Согласно пятому аспекту раскрытие дополнительно предусматривает машиночитаемый носитель данных, содержащий хранящуюся на нем исполняемую компьютером инструкцию, причем исполняемая компьютером инструкция при исполнении процессором реализует способ управления складским роботом, предусмотренный любым вариантом осуществления настоящего раскрытия.
Что касается способа и устройства управления складским роботом, робота и складской системы, предусмотренных вариантами осуществления настоящего раскрытия, в соответствии с информацией о положении контейнера в инструкции планирования контейнера складской робот перемещается в целевую позицию, и его захватное устройство перемещается на заданную высоту; в дополнение к этому, в соответствии с типом контейнера в инструкции планирования контейнера соответствующий ему алгоритм распознавания положения контейнера определяется для распознавания его информации о положении для того, чтобы захватить контейнер в соответствии с информацией о положении, так что реализуется автоматический захват различных типов контейнеров, таких как разные размеры, материалы или формы, сложность хранения, и снижается стоимость различных видов товаров, расширяется диапазон применения складского робота, и, в дополнение к этому, повышается степень автоматизации и эффективность складской системы.
Краткое описание чертежей
Сопроводительные чертежи, которые включены в настоящее описание и составляют часть описания, иллюстрируют варианты осуществления, соответствующие настоящему раскрытию, и совместно с описанием служат для пояснения принципов вариантов осуществления настоящего раскрытия.
Фиг.1 – схема случая применения способа управления складским роботом, предусмотренного вариантом осуществления настоящего раскрытия.
Фиг.2 – блок-схема последовательности операций способа управления складским роботом, предусмотренного вариантом осуществления настоящего раскрытия.
Фиг.3 – блок-схема последовательности операций способа управления складским роботом, предусмотренного другим вариантом осуществления настоящего раскрытия.
Фиг.4 – блок-схема этапа S304 в варианте осуществления, показанном на фиг.3 настоящего раскрытия.
Фиг.5 – блок-схема этапа S306 в варианте осуществления, показанном на фиг.3 настоящего раскрытия.
Фиг.6 – блок-схема этапа S308 в варианте осуществления, показанном на фиг.3 настоящего раскрытия.
Фиг.7 – блок-схема последовательности операций способа управления складским роботом, предусмотренного дополнительным вариантом осуществления настоящего раскрытия.
Фиг.8 – блок-схема этапа S411 в варианте осуществления, показанном на фиг.7 настоящего раскрытия.
Фиг.9 – блок-схема последовательности операций способа управления складским роботом, предусмотренного другим вариантом осуществления настоящего раскрытия.
Фиг.10 – структурная схема устройства управления складским роботом, предусмотренного вариантом осуществления настоящего раскрытия.
Фиг.11 – схематичная структурная схема складского робота согласно варианту осуществления настоящего раскрытия.
Фиг.12 – схематичная структурная схема складской системы, предусмотренной вариантом осуществления настоящего раскрытия.
Явные варианты осуществления настоящего раскрытия показаны на вышеупомянутых сопроводительных чертежах, и подробности могут быть описаны ниже. Эти чертежи и описания никоим образом не предназначены для ограничения объема идей настоящего раскрытия, а скорее для иллюстрации концепций настоящего раскрытия со ссылкой на конкретные варианты осуществления для специалистов в данной области техники.
Подробное описание изобретения
Примерные варианты осуществления подробно пояснены в данном документе и представлены в качестве примеров на сопроводительных чертежах. Когда приведенное ниже описание относится к чертежам, если не указано иное, одинаковые ссылочные позиции на разных сопроводительных чертежах представляют одинаковые или подобные элементы. Реализации, описанные в приведенных ниже примерных вариантах осуществления, не представляют все реализации, соответствующие настоящему раскрытию. Напротив, они являются только примерами устройств и способов, согласующихся с некоторыми аспектами настоящего раскрытия, подробно описанными в прилагаемой формуле изобретения.
Технические решения раскрытия и то, как технические решения раскрытия решают вышеупомянутые технические проблемы, поясняются подробно в последующих конкретных вариантах осуществления. Последующие конкретные варианты осуществления могут быть объединены друг с другом, и одни и те же или подобные концепции, или процессы могут не повторяться в некоторых вариантах осуществления. Варианты осуществления настоящего раскрытия будут описаны ниже совместно с чертежами.
Ниже представлено описание случаев применения вариантов осуществления настоящего раскрытия:
На фиг.1 показана схема случая применения способа управления складским роботом, предусмотренного вариантом осуществления настоящего раскрытия. Как показано на фиг.1, в интеллектуальной складской системе 100 используется складской робот 110 для подъема и хранения целевого контейнера на товарной полке 120 и используется модуль 130 управления складом для управления складским роботом 110 с целью перемещения в заданную позицию для получения и хранения целевого контейнера. Модуль 130 управления складом дополнительно хранит информацию о хранении каждого местоположения склада на товарной полке 120 и базовую информацию о целевом контейнере для облегчения управления складом.
В случае захвата целевого контейнера с помощью складского робота, складской робот в интеллектуальной складской системе, предусмотренной предшествующим уровнем техники, может только автоматически захватить точно такой же контейнер; однако возможны случаи, когда тип целевого контейнера отличается в реальных применениях, например, несовместимые габаритные размеры, несовместимые формы, несовместимые материалы и т.д.; для существующей складской системы часто необходимо добавлять дополнительные стандартные контейнеры для хранения, что увеличивает стоимость складирования и одновременно снижает эффективность складирования и выдачи товаров. Существующая складская система не может напрямую и автоматически захватывать контейнеры с разными типами контейнеров. Чтобы решить эту задачу, в способе управления складским роботом, предусмотренном вариантом осуществления настоящего раскрытия, для складской системы, включающей в себя несколько типов контейнеров, в соответствии с типами контейнеров определяется соответствующий алгоритм распознавания для распознавания информации о положении контейнеров, так что складской робот может автоматически подбирать различные типы контейнеров в соответствии с информацией о положении, что увеличивает диапазон применения складского робота и повышает степень интеллекта, степень автоматизации и эффективность складской системы.
На фиг.2 показана блок-схема последовательности операций способа управления складским роботом, предусмотренного вариантом осуществления настоящего раскрытия. Способ управления складским роботом может выполняться складским роботом, складской системой, процессором, сервером и т.п. Как показано на фиг.2, способ управления складским роботом, предусмотренный этим вариантом осуществления, включает в себя следующие этапы:
Этап S201: получить инструкцию планирования контейнера для первого целевого контейнера, где инструкция планирования контейнера включает в себя тип контейнера первого целевого контейнера.
В частности, первым целевым контейнером может быть любой один или более контейнеров на складе складской системы, что может быть определено с помощью инструкции планирования контейнеров. Инструкции планирования контейнеров могут выдаваться модулем управления складом складской системы или инструкциями, введенными соответствующим оператором через операционный интерфейс. Тип контейнера может быть определен такими аспектами, как размер, контур, материал и особенности поверхности контейнера. Особенности поверхности могут включать в себя, например, текстуру поверхности, цвет, наличие идентификационного рисунка, наличие выпуклости или углубления и т.д.
В частности, инструкция планирования контейнера может дополнительно включать в себя информацию о положении контейнера первого целевого контейнера; информация о местоположении контейнера может быть порядковым номером местоположении склада или значением координат местоположении склада, где расположен первый целевой контейнер.
Кроме того, в зависимости от размера тип контейнера может быть разделен на большой контейнер, стандартный контейнер и маленький контейнер; и в зависимости от контура его можно разделить на контейнер с правильным контуром и контейнер с неправильным контуром, например, прямоугольный контейнер представляет собой тип с правильным контуром, и контейнеры с выпуклостями или углублениями на поверхности представляют собой тип с неправильным контуром; контейнер с неправильным контуром также может быть разделен на контейнер с вогнутым контуром и контейнер с выпуклым контуром; кроме того, в зависимости от материалов его можно также разделить на контейнеры пластикового типа, контейнеры бумажного типа и т.п.; в зависимости от особенности поверхности он также может быть разделен на контейнер типа идентификационного рисунка на поверхности и контейнер типа без идентификатора на поверхности.
В частности, каждый тип контейнера может быть снабжен порядковым номером соответствующего типа с тем, чтобы определить тип первого целевого контейнера в соответствии с порядковым номером. Его можно описать четырехзначным шестнадцатеричным кодом, например, 2010; первая цифра используется для описания параметра размера, и цифра 2 может обозначать большой контейнер. Вторая цифра используется для описания параметра контура, и цифра 0 может обозначать обычный контейнер контура. Третья цифра используется для описания параметра материала, и цифра 1 обозначает пластиковый контейнер. Четвертая цифра используется для описания параметра поверхностного объекта, и цифра 0 может представлять контейнер типа «без идентификатора на поверхности». То есть 2010 означает то, что первый целевой контейнер – это большой пластиковый контейнер без идентификатора поверхности и с правильным контуром.
Безусловно, тип контейнеров также может быть отделен от других аспектов, или тип контейнеров может быть описан другими способами, такими как использование десятичного кода, строки и т.д., что не ограничивается настоящим раскрытием.
В качестве примера, инструкция планирования контейнера может иметь вид "1, N0053, 3", где первый параметр 1 указывает то, что действие, соответствующее инструкции, является захватом, и 0 может указывать сохранение. Второй параметр указывает порядковый номер местоположении склада. Третий параметр указывает то, что тип целевого контейнера – 3. Конкретное содержание инструкции: подбор контейнера с порядковым номером склада N0053, тип контейнера – 3.
Кроме того, инструкция планирования контейнера может также включать в себя информацию о размере первого целевого контейнера, весе, типе загруженных товаров и другую информацию, и информация о размере включает в себя длину, ширину и высоту.
Этап S202: определить алгоритм распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознать информацию о положении для первого целевого контейнера на основе алгоритма распознавания положения контейнера.
Информация о положении может включать в себя информацию о положении и информацию о размере первого целевого контейнера, такую как размер первого целевого контейнера, угол и глубина первого целевого контейнера по отношению к захватному устройству и другую информацию.
В частности, разные алгоритмы распознавания положения контейнера могут быть разработаны для разных типов контейнеров с тем, чтобы определить алгоритм распознавания положения контейнера, соответствующий им, в соответствии с типом контейнера.
При необходимости определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера включает в себя:
предварительное установление соответствия между типом контейнера и алгоритмом распознавания положения контейнера; и определение алгоритма распознавания положения контейнера для первого целевого контейнера с учетом соответствия и типа контейнера первого целевого контейнера.
В частности, алгоритм распознавания положения контейнера может идентифицировать информацию о положении для первого целевого контейнера путем идентификации количества и позиционного отношения заданных ключевых точек первого целевого контейнера или графа, составленного из ключевых точек. Идентификационная информация первого целевого контейнера может быть также распознана на основе алгоритма глубокого обучения, и информация о положении первого целевого контейнера может быть определена в соответствии с идентификационной информацией.
Этап S203: управлять складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении.
В частности, после определения информации о положении первого целевого контейнера положение складского робота и позицию или угол подъемного устройства можно регулировать в соответствии с информацией о положении. После того, как регулировка завершена, первый целевой контейнер захватывается захватным устройством.
В частности, при регулировке позиции складского робота и позиции или угла захвата в соответствии с информацией о положении центр захвата должен быть выровнен с центром первого целевого контейнера.
Что касается способа управления складским роботом, предусмотренного вариантами осуществления настоящего раскрытия, в соответствии с информацией о положении контейнера в инструкции планирования контейнера складской робот перемещается в целевую позицию, и его захватное устройство перемещается на заданную высоту; в дополнение к этому, в соответствии с типом контейнера в инструкции планирования контейнера соответствующий ему алгоритм распознавания положения контейнера определяется для распознавания его информации о положении для того, чтобы захватить контейнер в соответствии с информацией о положении, так что реализуется автоматический захват различных типов контейнеров, таких как разные размеры, материалы или формы, сложность хранения, и снижается стоимость различных видов товаров, расширяется диапазон применения складского робота, и, в дополнение к этому, повышается степень автоматизации и эффективность захвата товаров.
На фиг.3 показана блок-схема последовательности операций способа управления складским роботом, предусмотренного другим вариантом осуществления настоящего раскрытия. Как показано на фиг.3, способ управления складским роботом, предусмотренный этим вариантом осуществления, разделяет этапы S202 и S203 на основе способа управления складским роботом, предусмотренного вариантом осуществления, показанным на фиг.2, и добавляет этапы перемещения складского робота и распознавания идентификатора товарной полки после этапа S201; способ управления складским роботом, предусмотренный этим вариантом осуществления, может включать в себя следующие этапы:
Этап S301: получить инструкцию планирования контейнера для первого целевого контейнера, где инструкция планирования контейнера включает в себя информацию о положении контейнера первого целевого контейнера и тип контейнера первого целевого контейнера.
При необходимости в зависимости от особенности поверхности тип контейнера делится по меньшей мере на одно из следующего: тип гладкой поверхности, тип вогнутой и выпуклой поверхности и тип идентификационного рисунка на поверхности; в зависимости от особенности размера он делится по меньшей мере на одно из следующего: большой контейнер, стандартный контейнер и маленький контейнер; и в зависимости от особенности материала тип контейнера делится по меньшей мере на одно из следующего: бумажный контейнер и пластиковый контейнер.
В частности, контейнер с гладкой поверхностью означает то, что поверхность контейнера не имеет идентификационного рисунка и не имеет выпуклостей или впадин, например кубовидный контейнер с гладкой поверхностью и без идентификационного рисунка. Контейнер типа "идентификационного рисунка на поверхности" означает то, что поверхность контейнера включает в себя один или несколько идентификационных рисунков или идентификационный рисунок или идентификационную форму, состоящую из множества ключевых точек; идентификационные рисунки могут быть штрих-кодами, двухмерными кодами, идентификаторами продуктов, кодами продуктов и т.д.; идентификационные рисунки также могут быть текстом, числами, специальными символами и другой информацией. Контейнер с вогнутой и выпуклой поверхностью означает то, что поверхность контейнера имеет выпуклости или впадины, то есть на поверхности контейнера имеется криволинейная грань, например, вогнутая поверхность или выпуклая поверхность.
Этап S302: переместить складской робот в целевую позицию и переместить захватное устройство складского робота на заданную высоту в соответствии с информацией о положении контейнера.
Захватное устройство может представлять собой грузовые вилы для товаров, механическую руку, зажимное устройство и т.д. для захвата или зажима контейнера.
В частности, информация о местоположении контейнера может представлять собой информацию о координатах местоположении склада для размещения первого целевого контейнера, например, (2, 3, 5), что означает то, что местоположение склада находится на строке 3 столбца 5 второй товарной полки на складе. Кроме того, в соответствии с информацией о координатах складской робот перемещается в целевой столбец полки с целевыми товарами, соответствующий информации о координатах, и в соответствии с целевой строкой на полке с целевыми товарами, соответствующей информации о координатах, захватное устройство складской робот перемещается на заданную высоту.
Кроме того, складской робот дополнительно включает в себя модуль планирования пути; после приема информации о положении контейнера он может автоматически перемещаться в целевую позицию, соответствующую информации о положении контейнера, и перемещать захватное устройство на заданную высоту.
Кроме того, после перемещения захватного устройства на заданную высоту этот этап может дополнительно включать в себя: поворот захватного устройства в направлении, обращенном к первому целевому контейнеру, или, во время процесса перемещения захватного устройства на заданную высоту, поворот захватного устройства устройство в направлении, обращенном к первому целевому контейнеру.
Этап S303: определить то, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа гладкой поверхности, когда тип контейнера первого целевого контейнера является типом гладкой поверхности.
Этап S304: распознать информацию о положении для первого целевого контейнера на основе алгоритма распознавания положения типа гладкой поверхности.
В частности, алгоритм распознавания положения типа гладкой поверхности может быть алгоритмом распознавания на основе определения дальности с использованием лазера, то есть путем сканирования лазером расстояния до каждой ключевой точки первого целевого контейнера расстояние может быть получено путем перемещения складского робота влево и вправо, и информация о положении первого целевого контейнера определяется в соответствии с расстоянием до каждой ключевой точки.
В частности, алгоритм распознавания положения типа гладкой поверхности может быть алгоритмом распознавания на основе данных облака точек, то есть с помощью лазерного дальномера, осуществляющего сбор данных облака точек передней поверхности первого целевого контейнера, где данные облака точек могут быть получены путем перемещения лазерного дальномера, установленного на захватном устройстве, распознавания ключевых точек в данных облака точек и определения информации о положении первого целевого контейнера в соответствии с информацией о координатах каждой ключевой точки. Кроме того, информация об ассоциации каждой ключевой точки может быть определена в соответствии с информацией о координатах каждой ключевой точки, и информация о положении первого целевого контейнера определяется в соответствии с информацией о размере первого целевого контейнера в инструкции планирования контейнера.
Кроме того, контур первого целевого контейнера также может быть распознан в соответствии с данными облака точек, например, сегментом контурной линии, и информация о положении складского робота относительно первого целевого контейнера определяется в соответствии с контуром.
В дополнение к этому, на фиг.4 показана блок-схема этапа S304 в варианте осуществления, показанном на фиг.3 настоящего раскрытия. Как показано на фиг.4, этап S304 включает в себя следующие этапы:
Этап S3041: получить изображение облака точек и заданное опорное изображение первого целевого контейнера.
Изображение облака точек также может называться данными облака точек и может быть получено дальномером или камерой глубины. Они также могут быть данными облака точек всего контейнера или определенной области первого целевого контейнера. Заданное опорное изображение может быть полученным или сфотографированным изображением с первого целевого контейнера во время поступления в хранилище.
Этап S3042: зарегистрировать изображение облака точек и заданное опорное изображение.
В частности, изображение облака точек и заданное опорное изображение могут быть зарегистрированы на основе заданной ключевой точки. Ключевой точкой может быть каждая вершина или также может быть центр первого целевого контейнера.
Этап S3043: определить информацию о положении первого целевого контейнера в соответствии с результатом регистрации.
В частности, в соответствии с результатом регистрации можно определить угол размещения, глубину и другую информацию о первом целевом контейнере.
Этап S305: определить то, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа вогнутой и выпуклой поверхности, когда тип контейнера первого целевого контейнера является типом вогнутой и выпуклой поверхности.
Этап S306: распознать информацию о положении первого целевого контейнера на основе алгоритма распознавания положения типа вогнутой и выпуклой поверхности.
В частности, информация о положении первого целевого контейнера может быть определена в соответствии с высотой, длиной, шириной, количеством, формой, углом и другой информацией края путем идентификации информации края выпуклой части.
В дополнение к этому, на фиг.5 показана блок-схема этапа S306 в варианте осуществления, показанном на фиг.3 настоящего раскрытия. Как показано на фиг.5, этап S306 включает в себя следующие этапы:
Этап S3061: распознать вогнутые и выпуклые части поверхности первого целевого контейнера.
В частности, могут быть собраны данные облака точек первого целевого контейнера, и вогнутая и выпуклая части первого целевого контейнера могут быть распознаны в соответствии с информацией о координатах данных облака точек. Информация об изображении для каждого ракурса первого целевого контейнера может быть сфотографирована, так что вогнутые и выпуклые части поверхности первого целевого контейнера могут быть распознаны в соответствии с информацией об изображении для каждого ракурса.
Этап S3062: определить информацию о положении для первого целевого контейнера в соответствии с физической информацией о вогнутой и выпуклой частях.
Физическая информация содержит одно или несколько из: длины, ширины, высоты, глубины, угла и контура вогнутой и выпуклой частей и количества вогнутых и выпуклых частей.
Этап S307: определить то, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа идентификатора на поверхности, когда тип контейнера первого целевого контейнера является типом идентификационного рисунка на поверхности.
Этап S308: распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения типа идентификатора на поверхности.
В дополнение к этому, на фиг.6 показана блок-схема этапа S308 в варианте осуществления, показанном на фиг.3 настоящего раскрытия. Как показано на фиг.6, этап S308 включает в себя следующие этапы:
Этап S3081: распознать идентификационный рисунок первого целевого контейнера.
В частности, идентификационный рисунок первого целевого контейнера может быть распознан на основе алгоритма глубокого обучения, алгоритма ускоренных устойчивых признаков (SURF) или других алгоритмов.
Этап S3082: определить информацию о положении для первого целевого контейнера в соответствии с положением идентификационного рисунка.
В частности, инструкция планирования контейнера также может включать в себя предварительно введенный стандартный идентификатор идентификационного рисунка, и положение идентификационного рисунка может быть определено с помощью стандартного идентификатора и распознанного идентификационного рисунка.
Кроме того, когда инструкция планирования контейнера не включает в себя особенности материала контейнера, то есть она не указывает то, что первый целевой контейнер является бумажным контейнером или пластиковым контейнером, может быть также получено изображение первого целевого контейнера; по изображению первого целевого контейнера распознают цвет и/или текстуру первого целевого контейнера; по цвету и/или текстуре определяют то, является ли тип контейнера бумажным контейнером или пластиковым контейнером.
Кроме того, когда типом контейнера первого целевого контейнера является большой контейнер, стандартный контейнер или маленький контейнер, может быть выполнен захват признаков или распознавание изображения заданной области изображения первого целевого контейнера для определения информации о размере и информации о положении первого целевого контейнера, то есть информации о положении. Заданная область может быть областью среднего установленного диапазона изображения.
Этап S309: определить позиционное отношение между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении.
Позиционное отношение является относительной позицией с двумя параметрами, включая относительный угол и относительное расстояние.
В частности, в соответствии с информацией о положении первого целевого контейнера можно определить текущий угол размещения первого целевого контейнера и расстояние до складского робота, и также можно получить размер первого целевого контейнера. Затем, в соответствии с углом размещения первого целевого контейнера и расстоянием до складского робота, можно определить относительный угол и относительное расстояние между захватным устройством складского робота и первым целевым контейнером.
Этап S310: переместить и/или повернуть складской робот в соответствии с позицией.
Складской робот и его загрузочное устройство соединены соединительной частью, и загрузочное устройство можно перемещать или поворачивать путем перемещения или поворота складского робота.
В частности, складской робот поворачивается в соответствии с относительным углом, и складской робот перемещается в соответствии с относительным расстоянием.
Кроме того, можно также получить стандартное расстояние и стандартный угол складского робота, складской робот поворачивается в соответствии с результатом сравнения между относительным углом и стандартным углом, и складской робот перемещается в соответствии с результатом сравнения между относительным расстоянием и стандартным расстоянием.
Этап S311: управлять захватным устройством складского робота для захвата первого целевого контейнера.
В частности, складской робот может управлять своим захватным устройством с тем, чтобы захватить первый целевой контейнер, путем отправки инструкции захвата в складской робот.
Кроме того, инструкция захвата может ограничивать скорость захватного устройства на первой стадии относительно низкой, в то время как скорость на второй стадии является относительно высокой во время захвата захватным устройством. Первая стадия является стадией, когда захватное устройство не касается первого целевого контейнера; и вторая стадия является стадией, когда захватное устройство касается первого целевого контейнера. Преимущество этой настройки состоит в том, что для бумажных контейнеров она позволяет избежать повреждения контейнера, вызванного тем, что захватное устройство устремляется к бумажному контейнеру с высокой скоростью, и увеличить срок службы контейнера.
В этом варианте осуществления для трех типов контейнеров, то есть типа гладкой поверхности, типа вогнутой и выпуклой поверхности, типа идентификационного рисунка на поверхности, предусмотрены три различных алгоритма распознавания положения контейнера. На основе алгоритмов информация о положении контейнера соответствующего типа может быть автоматически распознана для того, чтобы реализовать автоматический захват различных типов контейнеров в соответствии с информацией о положении, что снижает затраты на захват различных типов товаров, расширяет область применения складского робота и одновременно повышает степень автоматизации и эффективность захвата товаров.
На фиг.7 показана блок-схема последовательности операций способа управления складским роботом, предусмотренного дополнительным вариантом осуществления настоящего раскрытия. На основе способа управления складским роботом, предусмотренного вариантом осуществления, показанным на фиг.3, способ управления складским роботом, предусмотренный этим вариантом осуществления, дополнительно разделяет этап S309, добавляет этап распознавания идентификатора товарной полки после этапа S302 и добавляет определение расстояния захвата после этапа S310; как показано на фиг.7, способ управления складским роботом включает в себя следующие этапы:
Этап S401: получить инструкцию планирования контейнера для первого целевого контейнера, где инструкция планирования контейнера включает в себя информацию о положении контейнера первого целевого контейнера и тип контейнера первого целевого контейнера.
Этап S402: переместить складской робот в целевую позицию и переместить захватное устройство складского робота на заданную высоту в соответствии с информацией о положении контейнера.
Этап S403: распознать информацию идентификации местоположения склада целевого местоположения склада, соответствующего первому целевому контейнеру.
Идентификационная информация о местоположении склада может представлять собой штрих-код, двухмерный код и т.д., и может быть также этикеткой, серийным номером или порядковым номером целевого местоположения склада.
В частности, распознавание может быть выполнено на основе алгоритма распознавания изображений, и информация идентификации местоположения склада также может быть распознана на основе радиочастотной технологии, инфракрасной технологии и т.д.
В частности, информация идентификации местоположения склада целевого местоположения склада, соответствующего первому целевому контейнеру, может быть получена первой, и затем распознается информация идентификации местоположения склада.
Этап S404: определить алгоритм распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознать информацию о положении для первого целевого контейнера на основе алгоритма распознавания положения контейнера, если информация идентификации местоположения склада успешно распознана.
Информация о положении включает в себя расстояние между первым целевым контейнером и складским роботом, и информацию о размере и информацию о положении для первого целевого контейнера; инструкция планирования контейнера дополнительно включает в себя стандартный размер первого целевого контейнера.
Кроме того, если распознавание не удается, захватное устройство складского робота перемещается в пределах заданной амплитуды, и распознавание на этапе S403 повторяется снова. Можно установить верхнее предельное значение времени повторения; если достигнуто значение верхнего предела, но идентификация не удалась, складской робот возвращается в состояние ожидания, и вырабатывается подсказка о сбое считывания информации идентификации местоположения склада.
В частности, сбой распознавания включает в себя два случая, один из которых состоит в том, что целевое местоположение склада не установлено с помощью информации идентификации местоположения склада, и другой состоит в том, что целевое местоположение склада установлено с помощью информации идентификации местоположения склада, но информация о местоположении склада недействительна. Если складской робот может осуществить сбор идентификационной информации о местоположении склада на этапе S403, но не может распознать эту информацию, текущий случай неудачного распознавания является вторым, в то время как, если информация идентификации местоположения склада не может быть собрана, текущим случаем неудачной идентификации является первый случай.
За счет добавления этапа распознавания товарной полки эффективно гарантируется точность захваченного товара.
Этап S405: определить то, существует ли первый целевой контейнер в соответствии с расстоянием.
В частности, наличие первого целевого контейнера определяется в соответствии с результатом сравнения между расстоянием между первым целевым контейнером и складским роботом и заданным порогом расстояния. Если расстояние больше заданного порога расстояния, это указывает на то, что первый целевой контейнер не размещен в целевом местоположении склада, то есть он отсутствует, и если оно меньше, то указывает на его наличие. Заданный порог расстояния может быть установлен в соответствии с глубиной положения склада.
Кроме того, этот этап также может быть заменен: в соответствии с собранным изображением первого целевого контейнера, которое может быть изображением, полученным 2D-камерой, или может быть также изображением облака точек, полученным камерой глубины, путем распознавания того, имеет ли заданная позиция изображения контейнер, можно определить то, имеется ли первый целевой контейнер.
Этап S406: если да, определить то, является ли первый целевой контейнер допустимым в соответствии со стандартным размером и информацией о размере первого целевого контейнера.
В частности, если информация о размере сильно отличается от стандартного размера, например, больше заданной ошибки, это указывает на то, что первый целевой контейнер недействителен, то есть текущий первый целевой контейнер не является контейнером, указанным в инструкция планирования контейнера.
Этап S407: если да, определить позиционное отношение между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении.
Если первый целевой контейнер недействителен, это указывает на то, что первый целевой контейнер не соответствует инструкции планирования контейнера, и тогда осуществляется управление складским роботом для перехода в режим ожидания. Когда первый целевой контейнер недействителен, может также вырабатываться подсказка о несоответствии контейнера, чтобы облегчить проверку первого целевого контейнера.
За счет дополнительного определения того, имеется ли первый захваченный целевой контейнер, и является ли он действительным контейнером, дополнительно гарантируется правильность захвата контейнера, и предотвращается возникновение ошибок распределения товаров, вызванное ошибками захвата товаров из-за неправильного размещения или ошибками регистрации системной информации.
Этап S408: переместить и/или повернуть складской робот в соответствии с позицией.
Этап S409: получить расстояние захвата между складским роботом и первым целевым контейнером.
В частности, расстояние захвата между складским роботом и первым целевым контейнером может быть получено на основе камеры глубины или дальномера.
Этап S410: определить то, удовлетворяет ли расстояние захвата условию подъема складского робота.
Условие захвата относится к условию, которому должно удовлетворять захватное устройство складского робота для выполнения захвата, и которое может представлять собой минимальный порог расстояния для расстояния захвата.
За счет определения расстояния захвата эффективно предотвращается возникновение случая, когда захватное устройство складского робота, например, грузовые вилы для товаров, ударяется о полку, когда они выдвигаются для захвата товаров, и гарантируется безопасность действия захвата.
Этап S411: если да, управлять захватным устройством складского робота таким образом, чтобы захватить первый целевой контейнер.
На фиг.8 показана блок-схема этапа S411 в варианте осуществления, показанном на фиг.7 настоящего раскрытия. Типом контейнера первого целевого контейнера этого варианта осуществления является тип бумажного контейнера. Как показано на фиг.8, этап S411 включает в себя следующие этапы:
Этап S4111: если да, получить инструкцию захвата бумажного контейнера.
Этап S4112: управлять захватным устройством складского робота для захвата первого целевого контейнера в соответствии с инструкцией захвата бумажного контейнера.
Инструкция захвата бумажного контейнера включает в себя инструкцию захвата на первой стадии и инструкцию захвата на второй стадии; скорость захвата позиции захвата на первой стадии меньше скорости захвата позиции захвата на второй стадии; первая стадия соответствует стадии, когда захватное устройство не касается первого целевого контейнера; и вторая стадия соответствует стадии, когда захватное устройство касается первого целевого контейнера.
Кроме того, если оно не выполняется, складской робот настраивается в соответствии с расстоянием подъема и условиями подъема, чтобы расстояние захвата соответствовало условию подъема складского робота. Может быть также установлено верхнее предельное значение времени настройки; если расстояние захвата не может удовлетворять условию подъема складского робота в этом верхнем предельном значении, складской робот возвращается в состояние ожидания.
В этом варианте осуществления точность захваченного контейнера предусматривается за счет распознавания местоположении целевого склада и определения наличия и действительности первого целевого контейнера. За счет определения того, удовлетворяет ли расстояние захвата условию захвата перед захватом, повышается безопасность действия захвата, и эффективно предотвращается возникновение явления удара захватного устройства о товарную полку.
На фиг.9 показана блок-схема последовательности операций способа управления складским роботом, предусмотренного другим вариантом осуществления настоящего раскрытия. На основе способа управления складским роботом, предусмотренного вариантами осуществления (фиг.2-8), в способе управления складским роботом, предусмотренным этим вариантом осуществления, после захвата первого целевого контейнера, во время захвата первого целевого контейнера или перед захватом первого целевого контейнера добавляется второй этап хранения целевого контейнера, как показано на фиг.9. Второе целевое контейнерное хранилище, в частности, включает в себя следующие этапы:
Этап S501: получить инструкцию сохранения второго целевого контейнера.
Инструкция сохранения контейнера содержит позицию местоположения, относящуюся к местоположению склада хранения, соответствующему второму целевому контейнеру, и второй целевой контейнер расположен на захватном устройстве складского робота.
Складской робот, упомянутый в этом варианте осуществления, может быть тем же самым складским роботом, что и складской робот в варианте осуществления захвата контейнера (вариант осуществления, соответствующий фиг.2-7), или он также может быть другим складским роботом.
В частности, второй целевой контейнер может быть тем же контейнером, что и первый целевой контейнер, и может быть также другим контейнером.
Этап S502: переместить складской робот в позицию хранения второго целевого контейнера в соответствии с позицией местоположения склада.
Этап S503: получить информацию идентификации местоположения склада, относящуюся к местоположению склада хранения.
Местоположение склада хранения может быть тем же местоположением склада, что и целевое местоположение склада в вышеприведенном варианте осуществления, и может быть также другим местоположением того же самого склада.
Этап S504: определить второе позиционное отношение между складским роботом и местоположением склада хранения в соответствии с идентификационной информацией о местоположении склада, относящейся к местоположению склада хранения.
Этап S505: переместить и/или повернуть складской робот в соответствии со вторым позиционным отношением.
Этап S506: определить то, существует ли третий контейнер на складе хранения.
Этап S507: если нет, сохранить второй целевой контейнер на складе хранения.
В этом варианте осуществления добавлен второй этап хранения целевого контейнера, а именно: в зависимости от позиции местоположения склада в инструкции сохранения контейнера, перемещение складского робота; распознавание информации идентификации местоположения склада для определения позиционного отношения между местоположением склада и складским роботом; автоматическая регулировка робота в зависимости от позиции; после завершения регулировки, определение того, имеются ли в месте хранения склада другие контейнеры; если нет, выполнение автоматического сохранения второго целевого контейнера, что реализует автоматическое сохранение контейнера складским роботом, повышает степень автоматизации и эффективность хранения контейнера и снижает трудозатраты.
На фиг.10 показана структурная схема устройства управления складским роботом, предусмотренного вариантом осуществления настоящего раскрытия. Как показано на фиг.10, устройство управления складским роботом, предусмотренное в этом варианте осуществления, включает в себя: модуль 610 получения инструкции планирования, модуль 620 распознавания положения контейнера и модуль 630 захвата контейнера.
Модуль 610 получения инструкции планирования выполнен с возможностью получения инструкции планирования контейнера первого целевого контейнера, где инструкция планирования контейнера содержит тип контейнера первого целевого контейнера; модуль 620 распознавания положения контейнера выполнен с возможностью определения алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавания информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера; и модуль 630 захвата контейнера выполнен с возможностью управления складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении.
При необходимости модуль 620 распознавания положения контейнера включает в себя:
блок установления соответствия, выполненный с возможностью предварительного установления соответствия между типом контейнера и алгоритмом распознавания положения контейнера; блок определения алгоритма распознавания положения, выполненный с возможностью определения алгоритма распознавания положения контейнера для первого целевого контейнера с учетом соответствия и типа контейнера первого целевого контейнера; и блок распознавания положения контейнера, выполненный с возможностью распознавания информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера.
При необходимости в соответствии с элементом поверхности тип контейнера делится по меньшей мере на одно из следующего: тип гладкой поверхности, тип вогнутой и выпуклой поверхности и тип идентификационного рисунка на поверхности.
При необходимости блок определения алгоритма распознавания положения дополнительно выполнен с возможностью:
определения того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа гладкой поверхности, когда тип контейнера первого целевого контейнера является типом гладкой поверхности; и, соответственно, блок распознавания положения контейнера дополнительно выполнен с возможностью: получения изображения облака точек и заданного опорного изображения первого целевого контейнера; регистрации изображения облака точек и заданное опорное изображение; и определения информации о положении первого целевого контейнера в соответствии с результатом регистрации.
При необходимости блок определения алгоритма распознавания положения дополнительно выполнен с возможностью:
определения того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа вогнутой и выпуклой поверхности, когда тип контейнера первого целевого контейнера является типом вогнутой и выпуклой поверхности; и, соответственно, блок распознавания положения контейнера дополнительно выполнен с возможностью: распознавания вогнутых и выпуклых частей поверхности первого целевого контейнера; и определения информации о положении первого целевого контейнера в соответствии с физической информацией о вогнутой и выпуклой частях, где физическая информация содержит одно или несколько из: длины, ширины, высоты, глубины, угла и контура вогнутой и выпуклой частей и количества вогнутых и выпуклых частей.
При необходимости блок определения алгоритма распознавания положения дополнительно выполнен с возможностью:
определения того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа идентификатора на поверхности, когда тип контейнера первого целевого контейнера является типом идентификационного рисунка на поверхности; и, соответственно, блок распознавания положения контейнера дополнительно выполнен с возможностью: распознавания идентификационного рисунка первого целевого контейнера; и определения информации о положении первого целевого контейнера в соответствии с позицией идентификационного рисунка.
При необходимости устройство управления складским роботом дополнительно включает в себя:
модуль распознавания идентификатора товарной полки, выполненный с возможностью распознавания информации идентификации местоположения склада целевого местоположения склада, соответствующего первому целевому контейнеру, перед распознаванием информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера; и, соответственно, модуль распознавания положения контейнера дополнительно выполнен с возможностью определения алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавания информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера, если информация идентификации местоположении склада успешно распознана.
При необходимости инструкция планирования контейнера дополнительно включает в себя информацию о положении контейнера первого целевого контейнера, и устройство управления складским роботом дополнительно включает в себя:
модуль перемещения робота, выполненный с возможностью перемещения складского робота в целевую позицию и перемещения захватного устройства складского робота на заданную высоту в соответствии с информацией о положении контейнера перед определением алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера.
При необходимости модуль 630 захвата контейнера включает в себя:
блок определения позиционного отношения, выполненный с возможностью определения позиционного отношения между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении; блок перемещения робота, выполненный с возможностью перемещения и/или поворота складского робота в соответствии с позицией; и блок захвата контейнера, выполненный с возможностью управления захватным устройством складского робота для захвата первого целевого контейнера.
При необходимости тип контейнера первого целевого контейнера является типом бумажного контейнера, и блок захвата контейнера дополнительно выполнен с возможностью:
получения положения захвата бумажного контейнера; управлять захватным устройством складского робота для захвата первого целевого контейнера в соответствии с инструкцией захвата бумажного контейнера; где инструкция захвата бумажного контейнера включает в себя инструкцию захвата на первой стадии и инструкцию захвата на второй стадии; скорость захвата позиции захвата на первой стадии меньше скорости захвата позиции захвата на второй стадии; первая стадия соответствует стадии, когда захватное устройство не касается первого целевого контейнера; и вторая стадия соответствует стадии, когда захватное устройство касается первого целевого контейнера.
При необходимости информация о положении включает в себя расстояние между первым целевым контейнером и складским роботом, и информацию о размере и информацию о положении для первого целевого контейнера; инструкция планирования контейнера дополнительно включает в себя стандартный размер первого целевого контейнера; и блок определения позиционного отношения дополнительно выполнен с возможностью:
определения того, существует ли первый целевой контейнер в соответствии с расстоянием; если да, определить то, является ли первый целевой контейнер допустимым в соответствии со стандартным размером и информацией о размере первого целевого контейнера; и если да, определить позиционное отношение между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении.
При необходимости устройство управления складским роботом дополнительно включает в себя:
модуль определения расстояния, выполненный с возможностью получения расстояния подъема между складским роботом и первым целевым контейнером после перемещения и/или поворота складского робота в соответствии с позицией; определения того, удовлетворяет ли расстояние захвата условию подъема складского робота; и, соответственно, блок захвата контейнера дополнительно выполнен с возможностью управления захватным устройством складского робота для захвата первого целевого контейнера, если расстояние захвата удовлетворяет условию захвата складского робота.
При необходимости устройство управления складским роботом дополнительно включает в себя:
модуль управления размещением товаров, выполненный с возможностью получения инструкции сохранения контейнера для второго целевого контейнера, где инструкция сохранения контейнера включает в себя позицию местоположения, относящуюся к местоположению склада хранения, соответствующему второму целевому контейнеру, и второй целевой контейнер расположен на захватном устройстве складского робота; перемещения складского робота в позицию хранения второго целевого контейнера в соответствии с позицией местоположения склада; получения идентификационной информации о местоположении склада, относящейся к местоположению склада хранения; определения второго позиционного отношения между складским роботом и местоположением склада хранения в соответствии с идентификационной информацией о местоположении склада, относящейся к местоположению склада хранения; перемещения и/или поворота складского робота в соответствии со вторым позиционным отношением; определения того, существует ли третий контейнер на складе хранения; и если нет, сохранения второго целевого контейнера на складе хранения.
На фиг.11 показана схематичная структурная схема складского робота согласно варианту осуществления настоящего раскрытия. Как показано на фиг.11, складской робот включает в себя память 710, процессор 720 и компьютерную программу.
Компьютерная программа хранится в памяти 710 и выполнена с возможностью выполнения процессором 720 для реализации способа управления складским роботом, предусмотренного любым вариантом осуществления, соответствующим фиг.2-9 настоящего раскрытия.
Память 710 и процессор 720 подключены через шину 730.
Соответствующие пояснения могут относиться к соответствующим описаниям и эффектам, соответствующим этапам, показанным на фиг.2-9 для понимания; здесь они опущены для краткости.
На фиг.12 показана схематичная структурная схема складской системы, предусмотренной вариантом осуществления настоящего раскрытия. Как показано на фиг.12, складская система включает в себя складской робот 810, товарную полку 820 и модуль 830 управления складом.
Целевой контейнер 821 размещается на товарной полке 820 или должен быть размещен на товарной полке 820. Складской робот 810 является складским роботом, предусмотренным вариантом осуществления, соответствующим фиг.11 настоящего раскрытия. Складской робот 810 подключен к модулю 830 управления складом для получения инструкции модуля управления складом, где инструкция может включать в себя информацию о цели, которую необходимо захватить или сохранить; в соответствии с инструкцией модуля 830 управления складом он перемещается в заданную позицию и выполняет захват и/или сохранение целевого контейнера.
Вариант осуществления настоящего раскрытия предусматривает машиночитаемый носитель данных, на котором хранится компьютерная программа, причем компьютерная программа при исполнении процессором реализует способ управления складским роботом, предусмотренный любым из вариантов осуществления, соответствующих фиг.2-9 настоящего раскрытия.
Машиночитаемый носитель данных может быть ROM, оперативной памятью (RAM), CD-ROM, лентой, гибким диском, оптическим устройством хранения данных и т.п.
Следует понимать, что в нескольких вариантах осуществления, представленных в настоящем раскрытии, раскрытые устройство и способ могут быть реализованы другим образом. Например, варианты осуществления устройства, описанные выше, являются просто примерными. Например, разделение модулей представляет собой просто разделение логических функций и может использовать другие способы разделения во время фактической реализации. Например, множество модулей или компонентов могут быть объединены или могут быть интегрированы в другую систему, или некоторые функции могут быть опущены или не реализованы. В дополнение к этому, соединение, или прямое соединение, или коммуникационное соединение между отображаемыми или обсуждаемыми компонентами может быть косвенным соединением или коммуникационным соединением через некоторые интерфейсы, устройства или модули и может быть электрическим, механическим соединением или иметь другие формы.
После рассмотрения описания и применения изобретения, раскрытого в данном документе, специалист в данной области техники может легко представить себе другие реализации настоящего раскрытия. Настоящее раскрытие направлено на охват любых вариаций, использования или адаптивных изменений настоящего раскрытия; эти вариации, использование или адаптивные изменения следуют общему принципу раскрытия и включают в себя общеизвестные знания или общеизвестные технические средства в этой технической области, которые не раскрыты в настоящем раскрытии. Описание и варианты осуществления рассматриваются просто как примеры, и истинный объем и сущность настоящего раскрытия указаны в приведенной ниже формуле изобретения.
Следует понимать, что настоящее раскрытие не ограничивается точными конструкциями, описанными и показанными выше на сопроводительных чертежах, и может подвергаться различным поправкам и изменениям, не выходя за рамки его объема. Таким образом, объем настоящего раскрытия должен быть ограничен только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И НОСИТЕЛЬ ДАННЫХ | 2019 |
|
RU2757646C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТОВАРОВ, СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ, СКЛАДСКОЙ РОБОТ И СКЛАДСКАЯ СИСТЕМА | 2021 |
|
RU2813398C1 |
| СКЛАДСКОЕ УСТРОЙСТВО И СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ | 2021 |
|
RU2806637C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ МОБИЛЬНОГО РОБОТА НА СКЛАДЕ | 2019 |
|
RU2748441C2 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| УСТРОЙСТВО И СПОСОБ УЧЕТА ТОВАРНОГО ЗАПАСА ТОРГОВОЙ ТОЧКИ И/ИЛИ СКЛАДА, А ТАКЖЕ ОСНАЩЕННАЯ ЭТИМ СИСТЕМА УПРАВЛЕНИЯ СКЛАДОМ | 2012 |
|
RU2597050C2 |
| СПОСОБ ВЫБОРА ФИЗИЧЕСКИХ ОБЪЕКТОВ В РОБОТЕХНИЧЕСКОЙ СИСТЕМЕ | 2011 |
|
RU2566226C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ НА СКЛАДЕ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2017 |
|
RU2688914C2 |
| СПОСОБ ПОСТРОЕНИЯ МАРШРУТА ДВИЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО СЕРВИСНОГО РОБОТА В ТОРГОВОМ ПОМЕЩЕНИИ | 2021 |
|
RU2769710C1 |
| АВТОМАТИЧЕСКИ УПРАВЛЯЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕДНАЗНАЧЕННОЕ ДЛЯ СКЛАДА | 2022 |
|
RU2789282C1 |
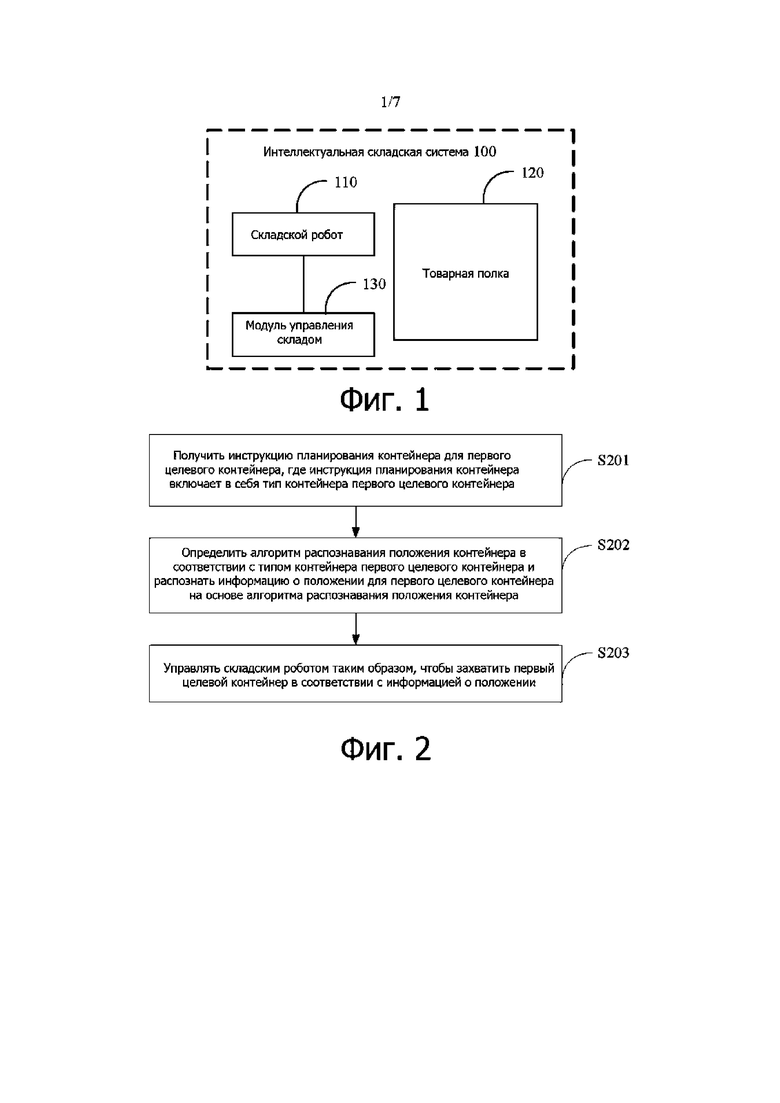
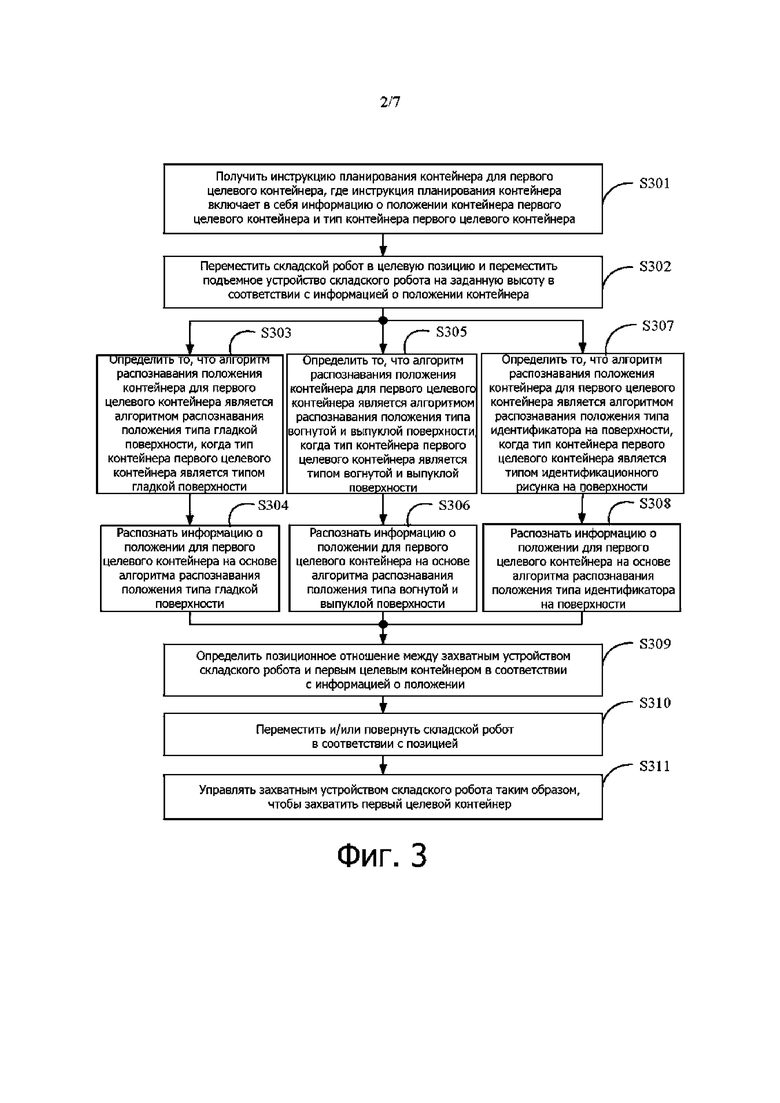
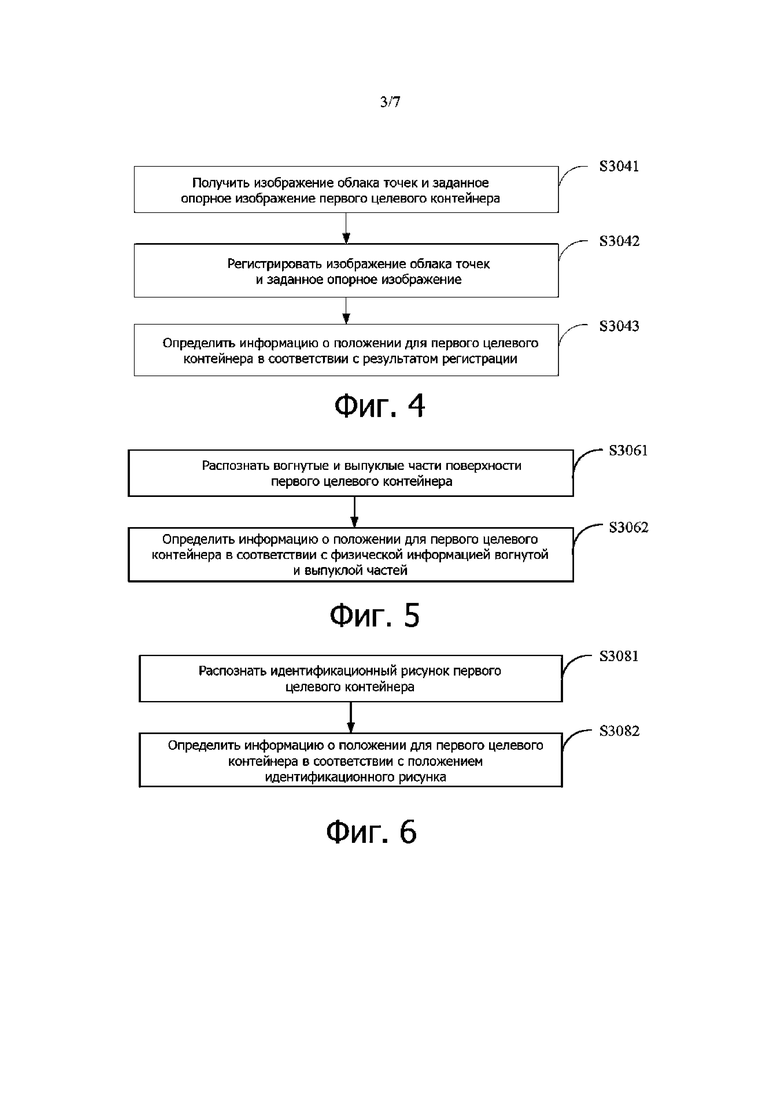
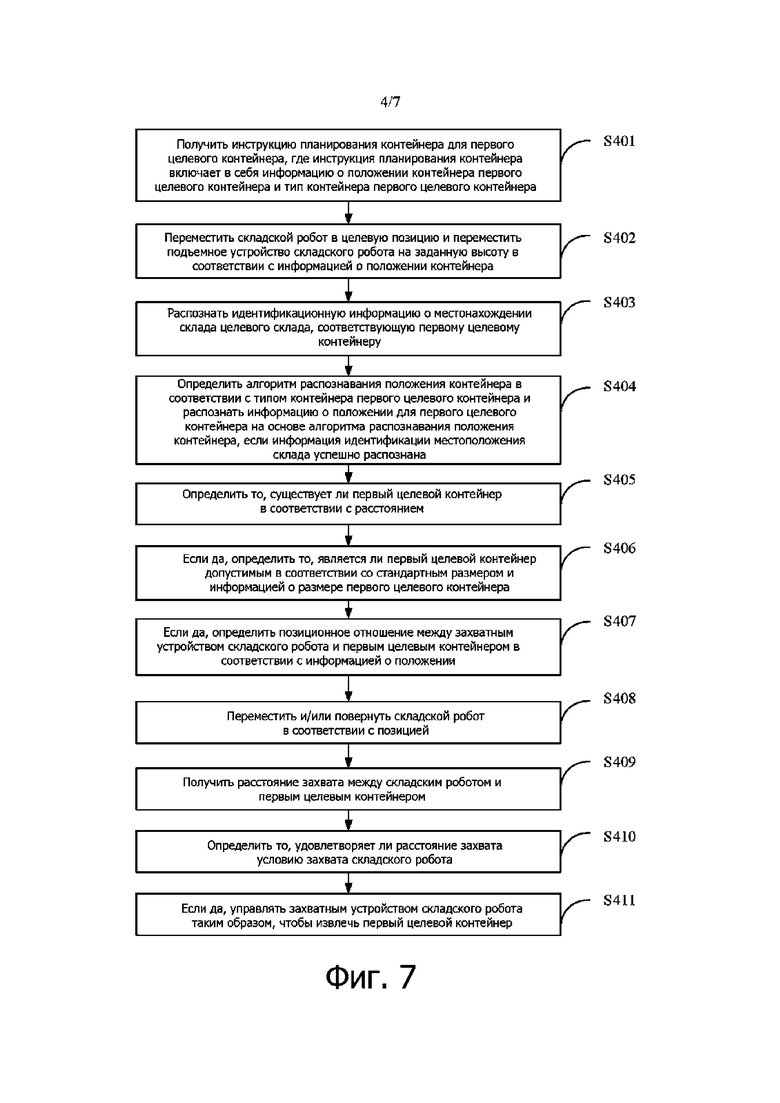
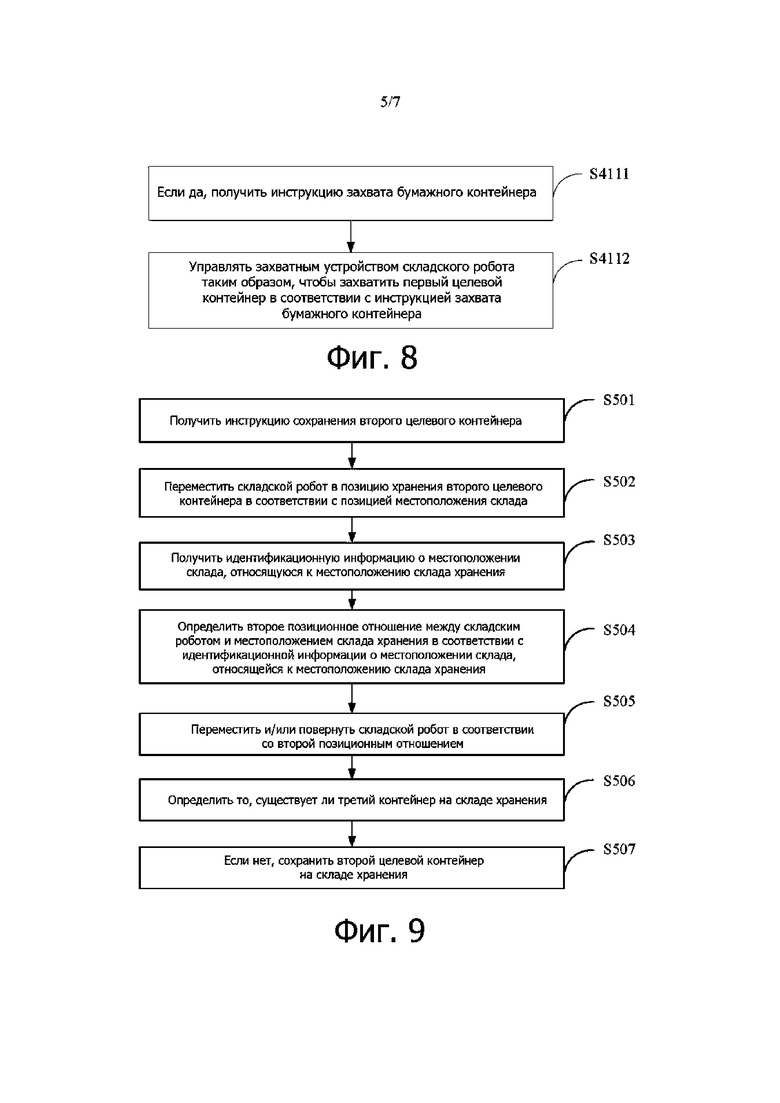
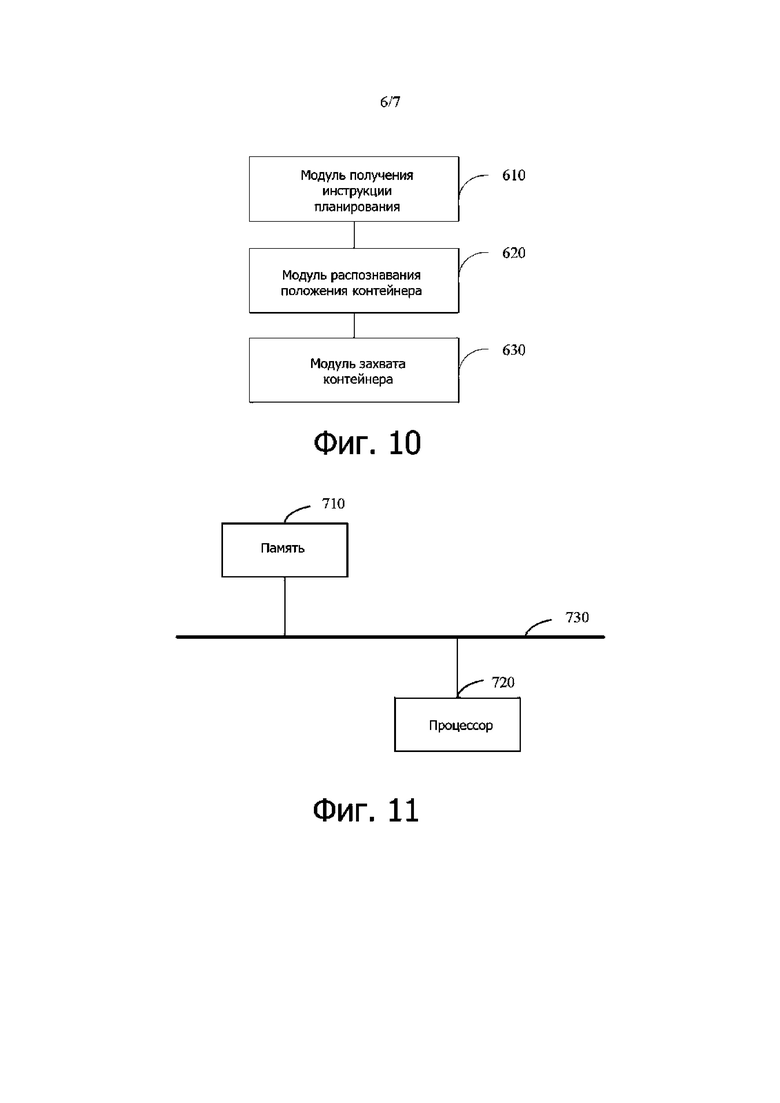
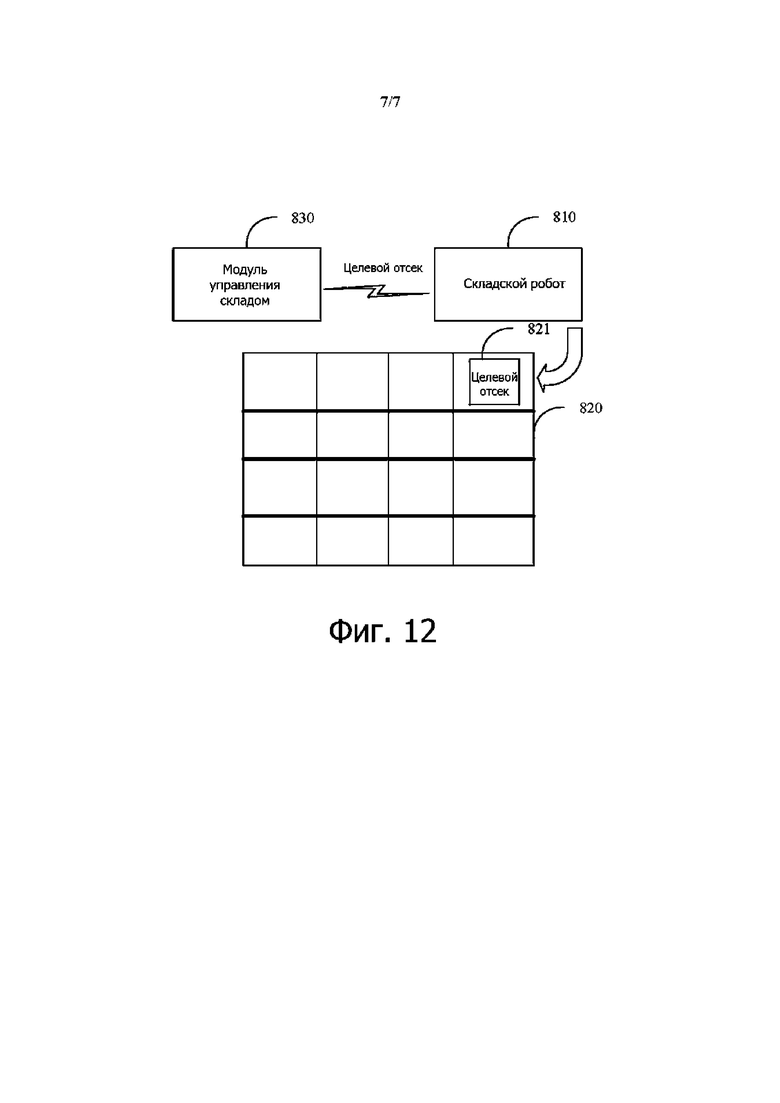
Изобретение относится к области интеллектуальных складских технологий. В способе управления складским роботом получают инструкции планирования контейнера для первого целевого контейнера, при этом данная инструкция содержит тип контейнера первого целевого контейнера. Далее определяют алгоритм распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознают информацию о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера. Затем управляют складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении. Повышается эффективность работы склада и диапазон применения складского робота. 5 н. и 14 з.п. ф-лы, 12 ил.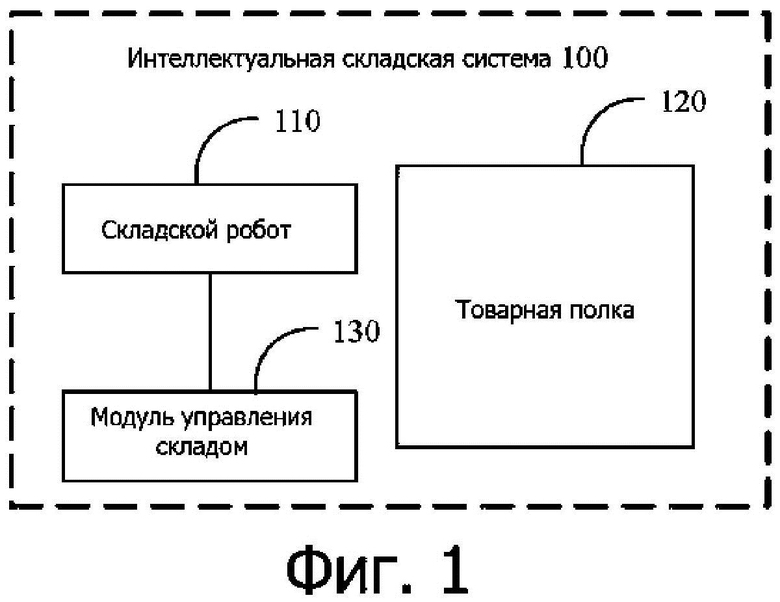
1. Способ управления складским роботом, содержащий:
получение инструкции планирования контейнера для первого целевого контейнера, причем инструкция планирования контейнера содержит тип контейнера первого целевого контейнера;
определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера; и
управление складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении.
2. Способ по п.1, в котором определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера содержит:
предварительное установление соответствия между типом контейнера и алгоритмом распознавания положения контейнера; и
определение алгоритма распознавания положения контейнера для первого целевого контейнера с учетом соответствия и типа контейнера первого целевого контейнера.
3. Способ по п.1 или 2, в котором в соответствии с особенностью поверхности тип контейнера разделяется по меньшей мере на одно из следующего: тип с гладкой поверхностью, тип с вогнутой и выпуклой поверхностью и тип с идентификатором на основе типа идентификационного рисунка на поверхности; или
в соответствии с особенностью размера тип контейнера разделяется по меньшей мере на одно из следующего: большой контейнер, стандартный контейнер и маленький контейнер; или
в соответствии с особенностью материала тип контейнера разделяется по меньшей мере на одно из следующего: бумажный контейнер и пластиковый контейнер.
4. Способ по п.3, в котором определение алгоритма распознавания положения контейнера в соответствии с типом контейнера содержит:
определение того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа гладкой поверхности, когда тип контейнера первого целевого контейнера является типом гладкой поверхности; и,
соответственно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения типа гладкой поверхности содержит:
получение изображения облака точек и заданного опорного изображения первого целевого контейнера;
регистрацию изображения облака точек и заданного опорного изображения; и
определение информации о положении первого целевого контейнера в соответствии с результатом регистрации.
5. Способ по п.3, в котором определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера содержит:
определение того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа вогнутой и выпуклой поверхности, когда тип контейнера первого целевого контейнера является типом вогнутой и выпуклой поверхности; и,
соответственно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения типа вогнутой и выпуклой поверхности содержит:
распознавание вогнутых и выпуклых частей поверхности первого целевого контейнера; и
определение информации о положении первого целевого контейнера в соответствии с физической информацией о вогнутой и выпуклой частях, причем физическая информация содержит одно или несколько из: длины, ширины, высоты, глубины, угла и контура вогнутой и выпуклой частей и количества вогнутых и выпуклых частей.
6. Способ по п.3, в котором определение алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера содержит:
определение того, что алгоритм распознавания положения контейнера для первого целевого контейнера является алгоритмом распознавания положения типа идентификатора на поверхности, когда тип контейнера первого целевого контейнера является типом идентификационного рисунка на поверхности; и,
соответственно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения типа "идентификатор на поверхности" содержит:
распознавание идентификационного рисунка первого целевого контейнера; и
определение информации о положении первого целевого контейнера в соответствии с позицией идентификационного рисунка.
7. Способ по любому из пп.3-6, в котором, после получения инструкции планирования контейнера для первого целевого контейнера, способ дополнительно содержит:
получение изображения первого целевого контейнера;
распознавание цвета и/или текстуры первого целевого контейнера в соответствии с изображением первого целевого контейнера; и
определение типа контейнера первого целевого контейнера, который является бумажным контейнером или пластиковым контейнером, в соответствии с цветом и/или текстурой первого целевого контейнера.
8. Способ по любому из пп.1-7, в котором, перед распознаванием информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера, способ дополнительно содержит:
распознавание информации идентификации местоположения склада целевого местоположения склада, соответствующего первому целевому контейнеру; и,
соответственно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера содержит:
если информация идентификации местоположения склада распознана успешно, распознавание информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера.
9. Способ по любому из пп.1-8, в котором инструкция планирования контейнера дополнительно содержит информацию о положении контейнера первого целевого контейнера, и, перед определением алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера, способ дополнительно содержит:
перемещение складского робота в целевую позицию и перемещение захватного устройства складского робота на заданную высоту в соответствии с информацией о положении контейнера.
10. Способ по п.9, дополнительно содержащий:
после перемещения захватного устройства складского робота на заданную высоту, поворот захватного устройства складского робота в направлении, обращенном к первому целевому контейнеру, или, во время процесса перемещения захватного устройства складского робота на заданную высоту, поворот захватного устройства в направлении, обращенном к первому целевому контейнеру.
11. Способ по любому из пп.1-10, в котором управление складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении содержит:
определение позиционного отношения между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении;
перемещение и/или поворот складского робота в соответствии с позицией; и
управление захватным устройством складского робота для захвата первого целевого контейнера.
12. Способ по п.11, в котором тип контейнера первого целевого контейнера является типом бумажного контейнера и управление подъемным устройством складского робота для захвата первого целевого контейнера содержит:
получение инструкции захвата бумажного контейнера;
управление захватным устройством складского робота для захвата первого целевого контейнера в соответствии с инструкцией захвата бумажного контейнера;
инструкция захвата бумажного контейнера включает в себя инструкцию захвата на первой стадии и инструкцию захвата на второй стадии; скорость захвата позиции захвата на первой стадии меньше скорости захвата позиции захвата на второй стадии; первая стадия соответствует стадии, когда захватное устройство не касается первого целевого контейнера; и вторая стадия соответствует стадии, когда захватное устройство касается первого целевого контейнера.
13. Способ по п.11, в котором информация о положении содержит расстояние между первым целевым контейнером и складским роботом и информацию о размере и информацию о положении для первого целевого контейнера; инструкция планирования контейнера дополнительно содержит стандартный размер первого целевого контейнера; и определение позиционного отношения между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении содержит:
определение того, существует ли первый целевой контейнер в соответствии с расстоянием;
если первый целевой контейнер существует, определение того, является ли первый целевой контейнер допустимым в соответствии со стандартным размером и информацией о размере первого целевого контейнера; и
если первый целевой контейнер действителен, определение позиционного отношения между захватным устройством складского робота и первым целевым контейнером в соответствии с информацией о положении.
14. Способ по любому из пп.11-13, в котором, после перемещения и/или поворота складского робота в соответствии с позицией, способ дополнительно содержит:
получение расстояния захвата между складским роботом и первым целевым контейнером;
определение того, удовлетворяет ли расстояние захвата условию захвата складского робота; и
если расстояние захвата удовлетворяет условию захвата складского робота, управление захватным устройством складского робота для захвата первого целевого контейнера.
15. Способ по любому из пп.1-14, дополнительно содержащий:
получение инструкции сохранения контейнера для второго целевого контейнера, причем инструкция сохранения контейнера содержит позицию местоположения склада для местоположения склада хранения, соответствующего второму целевому контейнеру, и второй целевой контейнер расположен на захватном устройстве складского робота;
перемещение складского робота в позицию хранения второго целевого контейнера в соответствии с позицией местоположения склада;
получение идентификационной информации о местоположении склада, относящейся к местоположению склада хранения;
определение второго позиционного отношения между складским роботом и местоположением склада хранения в соответствии с идентификационной информацией о местоположении склада, относящейся к местоположению склада хранения;
перемещение и/или поворот складского робота в соответствии со вторым позиционным отношением;
определение того, существует ли третий контейнер на складе хранения; и
если в местоположении склада хранения нет третьего контейнера, сохранение второго целевого контейнера в местоположении склада хранения.
16. Устройство управления складским роботом, содержащее:
модуль получения инструкции планирования, выполненный с возможностью получения инструкции планирования контейнера для первого целевого контейнера, причем инструкция планирования контейнера содержит тип контейнера первого целевого контейнера;
модуль распознавания положения контейнера, выполненный с возможностью определения алгоритма распознавания положения контейнера в соответствии с типом контейнера первого целевого контейнера и распознавания информации о положении первого целевого контейнера на основе алгоритма распознавания положения контейнера; и
модуль захвата контейнера, выполненный с возможностью управления складским роботом для захвата первого целевого контейнера в соответствии с информацией о положении.
17. Складской робот, содержащий память и по меньшей мере один процессор;
память, хранящую исполняемую компьютером инструкцию;
по меньшей мере один процессор, исполняющий исполняемую компьютером инструкцию, хранящуюся в памяти, таким образом, чтобы по меньшей мере один процессор выполнял способ управления складским роботом по любому из пп.1-15.
18. Складская система, содержащая складской робот по п.17, товарную полку и модуль управления складом, где
складской робот подключен к модулю управления складом и выполнен с возможностью перемещения к целевому контейнеру в соответствии с инструкцией модуля управления складом, и захвата и/или хранения целевого контейнера, причем целевой контейнер размещается на товарной полке.
19. Машиночитаемый носитель данных, на котором хранится исполняемая компьютером инструкция, причем исполняемая компьютером инструкция при исполнении процессором реализует способ управления складским роботом по любому из пп.1-15.
| CN 109956251 A, 02.07.2019 | |||
| CN 105751196 A, 13.07.2016 | |||
| CN 108044627 A, 18.05.2018 | |||
| JP 5429614 B2, 26.02.2014 | |||
| CN 105598965 A, 25.05.2016 | |||
| Электрический выпрямитель | 1931 |
|
SU31514A1 |

