Область техники, к которой относится изобретение
Настоящее изобретение относится к технической области интеллектуальных складских систем и в частности к устройству для захвата товаров, способу измерения глубины, складскому роботу и складской системе.
Уровень техники
Складской робот использует интеллектуальную операционную систему и осуществляет автоматические извлечение с хранения и помещение на хранение товаров в соответствии с системными командами; в дополнение к этому, система может работать 24 часа в сутки без перерывов для смены ручного управления и операций, и таким образом, повышает эффективность работы складского хозяйства и потому широко применяется и пользуется популярностью.
Однако в существующих интеллектуальных складских системах складской робот всегда осуществляет извлечение товарного контейнера с хранения и установку на место хранения в соответствии с используемыми для захвата и подъема товарного контейнера величинами, определяемыми на основе опыта или по умолчанию, так что в процессе захвата товарного контейнера и установки его на место этот товарный контейнер можно легко повредить или уронить.
Сущность изобретения
Варианты настоящего изобретения предлагают устройство для захвата товаров, способ измерения глубины, складского робота и складскую систему, система осуществляет измерение глубины товарного контейнера, который нужно захватить, и устанавливает рассматриваемый товарный контейнер на место в соответствии с глубиной этого товарного контейнера, что повышает степень безопасности при установке товарного контейнера на место.
Согласно первому аспекту, варианты настоящего изобретения предлагают устройство для захвата товаров. Это устройство для захвата товаров содержит: механизм для захвата товаров, датчик и модуль определения глубины. Датчик установлен на механизме для захвата товаров и конфигурирован для сбора измерительного сигнала, когда механизм для захвата товаров выдвигается. Модуль определения глубины конфигурирован для определения глубины товарного контейнера в соответствии с измерительным сигналом. Механизм для захвата товаров конфигурирован для захвата или установки на место товарного контейнера в соответствии с глубиной этого товарного контейнера. Глубина представляет собой длину товарного контейнера в направлении выдвижения механизм для захвата товаров.
В качестве опции, механизм для захвата товаров содержит левое плечо и правое плечо. Эти левое плечо и правое плечо расположены симметрично; и соответственно, датчик установлен на по меньшей мере одном из левого плеча и правого плеча механизма для захвата товаров.
В качестве опции, измерительный сигнал содержит сигнал по умолчанию и заданный сигнал о препятствии, сигнал по умолчанию представляет собой соответствующий сигнал в случае, если датчик не загорожен товарным контейнером, а заданный сигнал о препятствии представляет собой соответствующий сигнал в случае, если датчик загорожен товарным контейнером. Модуль определения глубины дополнительно конфигурирован для получения, когда измерительный сигнал изменяется от сигнала по умолчанию к заданному сигналу о препятствии, первого состояния механизма для захвата товаров; получения, когда измерительный сигнал изменяется от заданного сигнала о препятствии к сигналу по умолчанию, второго состояния механизма для захвата товаров; и определения глубины товарного контейнера в соответствии с первым состоянием и вторым состоянием.
В качестве опции, первое состояние включает в себя первую длину выдвижения механизма для захвата товаров, а второе состояние включает в себя вторую длину выдвижения механизма для захвата товаров, модуль определения глубины дополнительно сконфигурирован для определения глубины товарного контейнера в соответствии с разницей значение между первой длиной выдвижения и второй длиной выдвижения.
В качестве опции, датчик содержит пару датчиков пересечения луча. Этой парой датчиков пересечения луча являются излучающий датчик и приемный датчик. Излучающий датчик и приемный датчик расположены симметрично на левом плече и правом плече. Соответственно, заданный сигнал о препятствии представляет собой выходной сигнал приемного датчика, когда этот приемный датчик не принимает сигнал от излучающего датчика; и сигнал по умолчанию представляет собой выходной сигнал приемного датчика, когда этот приемный датчик принимает сигнал от излучающего датчика.
В качестве опции, датчик содержит по меньшей мере две пары датчиков пересечения луча. Каждая пара датчиков пересечения луча расположена симметрично на левом плече и правом плече. Между двумя соседними группами датчиков пересечения луча имеется заданный промежуток. Соответственно, модуль определения глубины дополнительно конфигурирован для определения глубины товарного контейнера согласно величине этого заданного промежутка и измерительным сигналам, собранным по меньшей мере двумя парами датчиков пересечения луча.
В качестве опции, датчик содержит N+1 пар датчиков пересечения луча; каждая пара датчиков пересечения луча расположена симметрично на левом и правом плече, и между двумя соседними группами датчиков пересечения луча имеется заданный промежуток, где N больше или равно 1. Модуль определения глубины дополнительно сконфигурирован для: определения, когда выходные сигналы приемных датчиков по меньшей мере двух пар датчиков пересечения лучей являются сигналами по умолчанию, а M-й приемный датчик является ближайшим приемным датчиком к первому приемному датчику среди приемных датчиков, выходные сигналы которых являются сигналами по умолчанию, (M-1)*L как глубину товарного контейнера, где M представляет собой положительное целое число, меньшее или равное N, L представляет собой величину заданного промежутка, а первый приемный датчик представляет собой приемный датчик, расположенный на конце механизма для захвата товаров в направлении выдвижения механизма для захвата товаров.
В качестве опции, датчик представляет собой визуальный датчик. Этот визуальный датчик расположен на верхней поверхности механизма для захвата товаров. Измерительный сигнал представляет собой измеренное изображение рабочей области механизма для захвата товаров, сфотографированное визуальным датчиком.
В качестве опции, датчик представляет собой датчик для измерения расстояния. Этот датчик для измерения расстояния расположен на внутренней стороне левого плеча или правого плеча. Измерительный сигнал представляет измеренное расстояние с выхода датчика для измерения расстояния.
В качестве опции, механизм для захвата товаров дополнительно содержит механизм толкающей штанги. Этот механизм толкающей штанги подвижно установлен на одном конце механизма для захвата товаров в направлении выдвижения механизма для захвата товаров; а после того, как модуль определения глубины определяет глубину товарного контейнера, механизм толкающей штанги поворачивается внутрь в состояние перпендикулярности к внутренней боковой поверхности механизма для захвата товаров.
В качестве опции, модуль определения глубины дополнительно конфигурирован для: получения заданного расстояния выдвижения плеча; получения, когда фактическое расстояние выдвижения плеча механизма для захвата товаров достигнет заданного расстояния выдвижения плеча, измерительного сигнала с выхода датчика; управления, если измерительный сигнал представляет собой сигнал по умолчанию, механизмом для захвата товаров с целью захватить товарный контейнер; и генерации, если измерительный сигнал представляет собой заданный сигнал о препятствии, информации об ошибке заданного расстояния выдвижения плеча.
Согласно второму аспекту, настоящее изобретение дополнительно предлагает способ измерения глубины. Этот способ выполняется устройством для захвата товаров в складском роботе. Этот способ содержит: сбор, датчиком устройства для захвата товаров, измерительного сигнала, когда происходит выдвижение механизма для захвата товаров, в устройстве для захвата товаров; определение, модулем определения глубины в устройстве для захвата товаров, глубины товарного контейнера в соответствии с измерительным сигналом; захват или установка на место посредством механизм для захвата товаров товарного контейнера в соответствии с глубиной этого товарного контейнера, где эта глубина представляет собой длину товарного контейнера в направлении выдвижения механизма для захвата товаров.
В качестве опции, механизм для захвата товаров содержит левое плечо и правое плечо, а процедура определения глубины товарного контейнера в соответствии с измерительным сигналом содержит: получение, если измерительный сигнал изменяется от сигнала по умолчанию к заданному сигналу о препятствии, первого состояния механизма для захвата товаров; получение, если измерительный сигнал изменяется от заданного сигнала о препятствии к сигналу по умолчанию, второго состояния механизма для захвата товаров; и определение глубины товарного контейнера в соответствии с первым состоянием и вторым состоянием.
В качестве опции, датчик содержит пару датчиков пересечения луча. Эта пара датчиков пересечения луча содержит излучающий датчик и приемный датчик. Эти излучающий датчик и приемный датчик расположены симметрично на левом плече и на правом плече. Заданный сигнал о препятствии представляет собой выходной сигнал приемного датчика, когда этот приемный датчик не принимает сигнал от излучающего датчика; и сигнал по умолчанию представляет собой выходной сигнал приемного датчика, когда этот приемный датчик принимает сигнал от излучающего датчика.
В качестве опции, датчик содержит по меньшей мере две пары датчиков пересечения луча. Каждая пара датчиков пересечения луча расположена симметрично на левом плече и на правом плече, и при этом присутствует заданный промежуток между этими двумя соседними группами датчиков пересечения луча. Процедура определения глубины товарного контейнера в соответствии с измерительным сигналом содержит: определение глубины товарного контейнера в соответствии с величиной заданного промежутка и измерительными сигналами, собранными по меньшей мере двумя парами датчиков пересечения луча.
В качестве опции, датчик представляет собой визуальный датчик. Этот визуальный датчик расположен на верхней поверхности механизма для захвата товаров. Процедура сбора, датчиком в устройстве для захвата товаров, измерительного сигнала, когда происходит выдвижение механизма для захвата товаров в устройстве для захвата товаров, содержит: фотографирование, визуальным датчиком, измеренного изображения рабочей области механизма для захвата товаров, когда происходит выдвижение механизма для захвата товаров, в устройстве для захвата товаров; и соответственно, процедура определения глубины товарного контейнера согласно измерительным сигналам содержит: определение глубины товарного контейнера в соответствии с измеренным изображением.
В качестве опции, датчик представляет собой датчик для измерения расстояния. Этот датчик для измерения расстояния расположен на внутренней стороне левого плеча или правого плеча. Процедура сбора датчиком в устройстве для захвата товаров, измерительного сигнала, когда происходит выдвижение механизма для захвата товаров, в устройстве для захвата товаров содержит: сбор, датчиком для измерения расстояния, измеренного расстояния, когда происходит выдвижение механизма для захвата товаров, в устройстве для захвата товаров; и соответственно, процедура определения глубины товарного контейнера согласно измерительному сигналу содержит: определение глубины товарного контейнера в соответствии с измеренным расстоянием.
В качестве опции, механизм для захвата товаров дополнительно содержит механизм толкающей штанги. Этот механизм толкающей штанги установлен подвижно на одном конце механизма для захвата товаров в направлении выдвижения механизма для захвата товаров; и после определения глубины товарного контейнера в соответствии с измерительным сигналом, способ измерения глубины дополнительно содержит: управление механизмом толкающей штанги с целью поворота его внутрь в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров; и захват товарного контейнера в соответствии с глубиной этого товарного контейнера.
В качестве опции, после захвата товарного контейнера в соответствии с глубиной этого товарного контейнера, способ дополнительно содержит: установку, в соответствии с глубиной товарного контейнера, этого товарного контейнера на буферный механизм складского робота.
В качестве опции, способ измерения глубины дополнительно содержит: определение, в соответствии с измерительным сигналом, если устройство для захвата товаров инициализировано, присутствует ли товарный контейнер на механизме для захвата товаров в устройстве для захвата товаров; и в котором управление механизмом толкающей штанги с целью поворота его внутрь в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров, содержит: если определено, что товарный контейнер присутствует на механизме для захвата товаров , управление механизмом толкающей штанги с целью поворота его внутрь в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров.
В качестве опции, после определения глубины товарного контейнера в соответствии с измерительным сигналом, способ дополнительно содержит: получение, модулем определения глубины, заданного расстояния выдвижения плеча; получение, если фактическое расстояние выдвижения плеча механизма для захвата товаров достигло заданного расстояния выдвижения плеча, измерительного сигнала с выхода датчика; управление, если измерительный сигнал представляет собой сигнал по умолчанию, механизмом для захвата товаров, чтобы захватить товарный контейнер в соответствии с глубиной этого товарного контейнера; и генерацию, если измерительный сигнал представляет собой заданный сигнал о препятствии, информации об ошибке заданного расстояния выдвижения плеча.
Согласно третьему аспекту, настоящее изобретение дополнительно предлагает складского робота, содержащего подвижное шасси и устройство для захвата товаров, предлагаемое в любом из вариантов настоящего изобретения, где устройство для захвата товаров соединено с подвижным шасси и конфигурировано для захвата или установки на место товарного контейнера в соответствии с глубиной этого товарного контейнера.
В качестве опции, складской робот дополнительно содержит: буферный механизм, установленный на подвижном шасси и конфигурированный для помещения на него товарного контейнера; и соответственно, устройство для захвата товаров, дополнительно конфигурировано для: помещения товарного контейнера на буферный механизм в соответствии с глубиной этого товарного контейнера.
Согласно четвертому аспекту, настоящее изобретение дополнительно предлагает складскую систему, содержащую складской робот, предлагаемый вариантом изобретения, соответствующим третьему аспекту настоящего изобретения, товарную полку и модуль управления складами. Складской робот соединен с модулем управления складами и конфигурирован для перемещения, в соответствии с командами от модуля управления складами, в позицию, где расположен товарный контейнер, и захвата товарного контейнера, где товарный контейнер помещен на товарную полку, или перемещения в позицию, где должен быть расположен товарный контейнер, в соответствии с командами от модуля управления складами, и установки на место товарного контейнера.
Согласно пятому аспекту, настоящее изобретение дополнительно предлагает читаемый компьютером носитель для хранения информации. Этот читаемый компьютером носитель для хранения информации сохраняет выполняемые компьютером команды. Эти выполняемые компьютером команды конфигурированы для того, чтобы при выполнении их процессором осуществлять способ измерения глубины, предлагаемый любым из вариантов настоящего изобретения.
В соответствии с устройством для захвата товаров, способом измерения глубины, складским роботом и складской системой, предлагаемыми вариантами настоящего изобретения, на механизме для захвата товаров в устройстве для захвата товаров установлен датчик, и посредством модуля определения глубины, выполняют определение глубины товарного контейнера в соответствии с измерительным сигналом, собранным датчиком, так что захват, а также установка товарного контейнера на место производится в соответствии с глубиной этого товарного контейнера, и таким образом, улучшается эффективность и безопасность захвата, а также установки на место товарного контейнера, и эффективно уменьшается вероятность того, что этот товарный контейнер во время помещения на место будет поврежден или упадет, вследствие чего повышаются степень интеллектуальности и эффективность работы складского робота.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в настоящее описание изобретения и составляют часть этого описания, иллюстрируют варианты, соответствующие настоящему изобретению, и используются вместе с настоящим описанием для пояснения принципов изобретения.
Фиг. 1 представляет схему сценария применения, предлагаемого одним из вариантов настоящего изобретения.
Фиг. 2 представляет упрощенную структурную схему устройства для захвата товаров, предлагаемого одним из вариантов настоящего изобретения.
Фиг. 3 представляет упрощенную структурную схему механизма для захвата товаров в соответствии с вариантом, показанным на фиг. 2.
Фиг. 4 представляет упрощенную структурную схему, механизма для захвата товаров в соответствии с вариантом, показанным на фиг. 2.
Фиг. 5 представляет упрощенную структурную схему устройства для захвата товаров, предлагаемого другим вариантом настоящего изобретения.
Фиг. 6 представляет упрощенную структурную схему устройства для захвата товаров, предлагаемого другим вариантом.
Фиг. 7 представляет упрощенную структурную схему устройства для захвата товаров, предлагаемого другим вариантом настоящего изобретения.
Фиг. 8 представляет упрощенную структурную схему устройства для захвата товаров, предлагаемого другим вариантом настоящего изобретения.
Фиг. 9 представляет упрощенную структурную схему устройства для захвата товаров, предлагаемого другим вариантом настоящего изобретения.
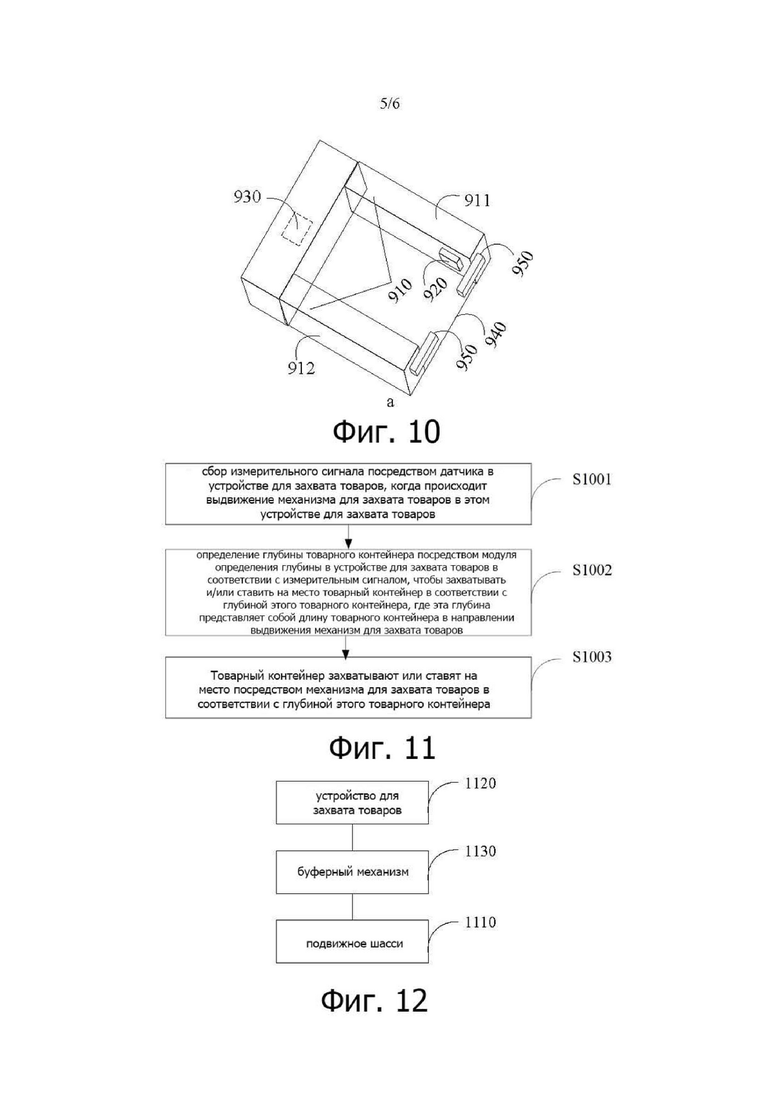
Фиг. 10 представляет упрощенную структурную схему устройства для захвата товаров с механизмом толкающей штанги, находящимся в рабочем состоянии, в варианте, показанном на фиг. 9.
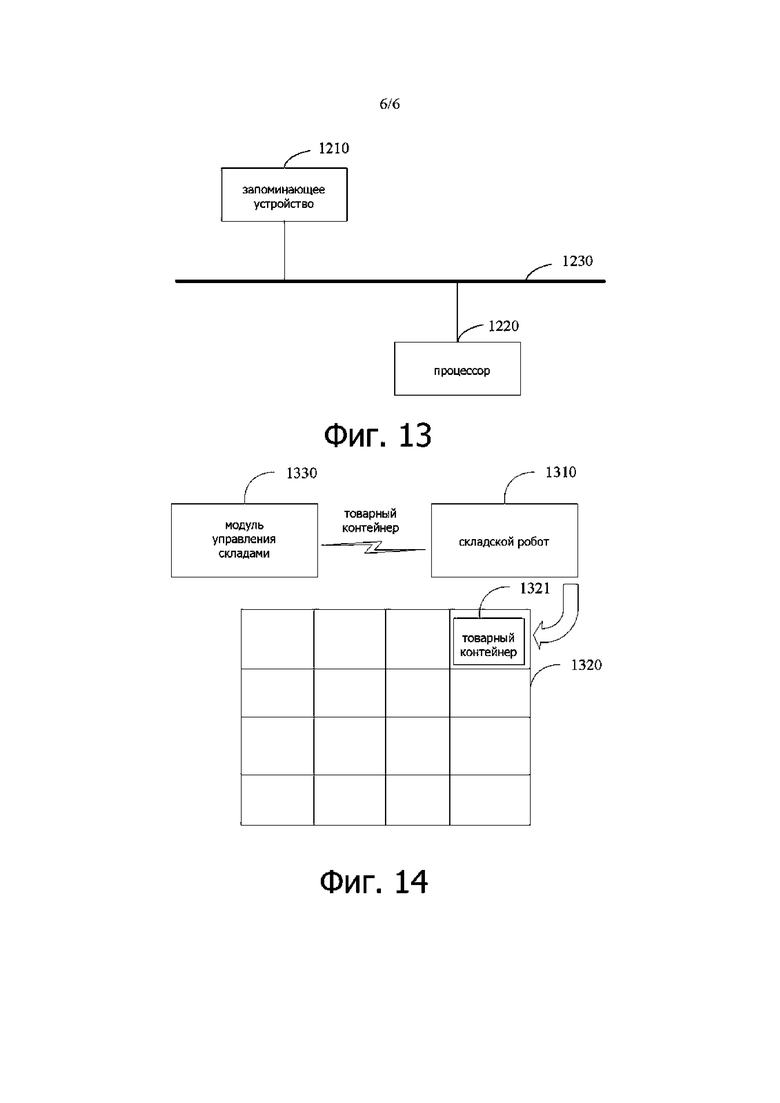
Фиг. 11 представляет логическую схему способа измерения глубины, предлагаемого одним из вариантов настоящего изобретения.
Фиг. 12 представляет упрощенную структурную схему складского робота, предлагаемого одним из вариантов настоящего изобретения.
Фиг. 13 представляет упрощенную структурную схему складского робота, предлагаемого одним из вариантов настоящего изобретения.
Фиг. 14 представляет упрощенную структурную схему складской системы, предлагаемой одним из вариантов настоящего изобретения.
На перечисленных выше чертежах показаны конкретные варианты настоящего изобретения, а более подробное описание будет дано ниже. Эти чертежи и текстовое описание не имеют целью ограничить концепцию настоящего изобретения каким-либо образом, а предназначены для иллюстрации концепции настоящего изобретения для специалистов в рассматриваемой области с привязкой к конкретным вариантам.
Описание вариантов
Примеры вариантов здесь будут описаны подробно и соответствующие примеры представлены на прилагаемых чертежах. Когда последующее описание относится к прилагаемым чертежам, если не указано иное, одинаковые цифровые позиционные обозначения на разных прилагаемых чертежах представляют одни и те же или аналогичные элементы. Варианты реализации, описываемые в последующих примерах вариантов, не представляют все возможные варианты реализации, согласованные с настоящим изобретением. Напротив, они являются всего лишь примерами устройств и способов, согласованных с некоторыми аспектами настоящего изобретения, как это подробно описано в прилагаемой Формуле изобретения.
Дополнительно в конкретных вариантах подробно рассмотрены технические решения согласно настоящему изобретению и то, как эти технические решения справляются с приведенными выше техническими проблемами. Последующие конкретные варианты можно комбинировать одни с другими, а одинаковые или аналогичные концепции или процессы могут быть не описаны в некоторых вариантах. Варианты настоящего изобретения описаны ниже со ссылками на прилагаемые чертежи.
Сценарии применения вариантов настоящего изобретения описаны ниже.
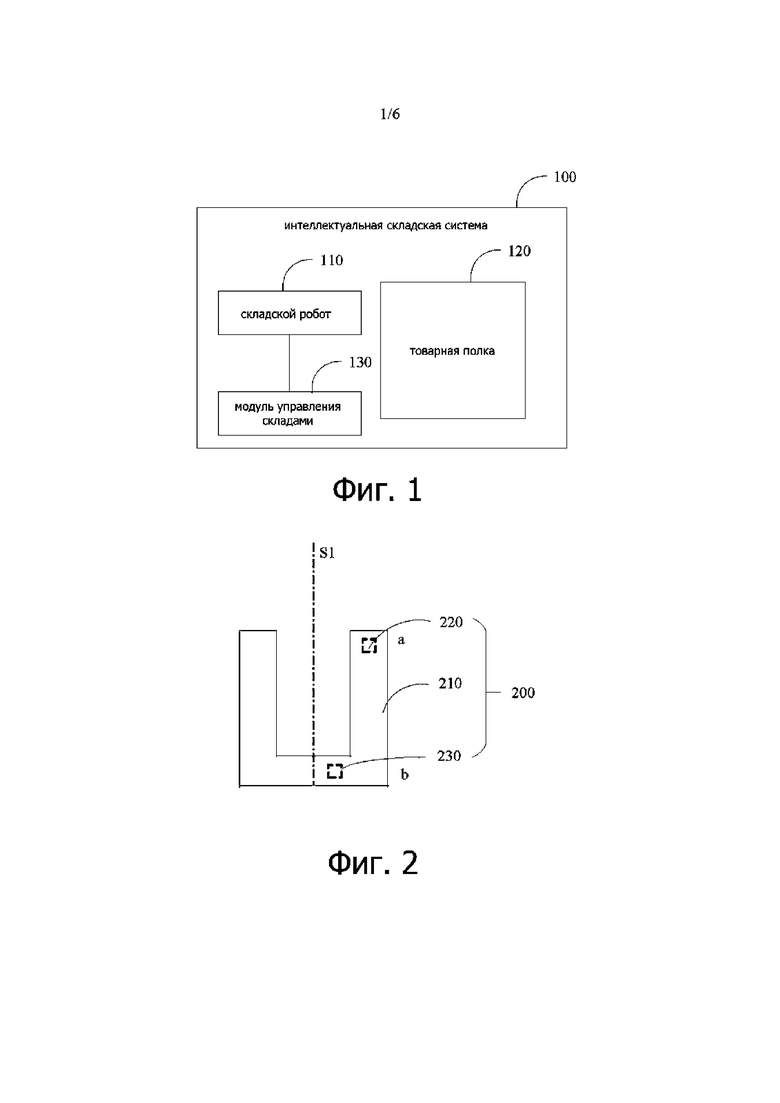
На фиг. 1 представлена схема сценария применения, предлагаемого одним из вариантов настоящего изобретения. Как показано на фиг. 1, интеллектуальная складская система 100 использует складского робота 110 для захвата и сохранения целевого товарного контейнера на товарной полке 120 и использует модуль 130 управления складами для управления складским роботом 110 с целью перемещения его в заданную позицию для захвата и установки на хранение целевого товарного контейнера. Модуль 130 управления складами сохраняет информацию о хранении для каждой позиции хранения на товарной полке 120 и базовую информацию о целевом товарном контейнере, тем самым способствуя управлению складами.
В сценарии, в котором захват целевого товарного контейнера осуществляется складским роботом, если складской робот в интеллектуальной складской системе, предлагаемой в известной технике, захватывает или ставит на место товарные контейнеры, тогда для товарных контейнеров, имеющих разнообразные размеры, захват и установка на место производятся только в соответствии с неким предварительно заданным фиксированным режимом. При установке на место товарного контейнера большого размера может легко произойти повреждение этого товарного контейнера из-за использования заданного по умолчанию расстояния для выталкивания и установки на место. Более того, при установке на место товарного контейнера, имеющего небольшие размеры, такой товарный контейнер невозможно будет поместить в самую глубокую позицию из-за использования заданного по умолчанию расстояния для выталкивания и установки на место, так что этот товарный контейнер может легко соскользнуть или упасть в процессе перемещения. Для решения этих проблем, устройство для захвата товаров, предлагаемое вариантами настоящего изобретения, содержит модуль определения глубины и датчик, установленный на механизме для захвата товаров, при этом модуль определения глубины может определить глубину товарного контейнера в соответствии с измерительным сигналом, собранным датчиком, так что можно будет осуществить адаптивные захват и установку на место рассматриваемого товарного контейнера в соответствии с глубиной этого товарного контейнера, безопасность захвата и установки на место товарного контейнера улучшается, а вероятность повреждения и падения товарного контейнера в процессе установки на место эффективно снижается.
На фиг. 2 представлена упрощенная структурная схема устройства для захвата товаров, предлагаемого одним из вариантов настоящего изобретения. Такое устройство для захвата товаров применимо к складскому роботу. Как показано на фиг. 2, устройство 200 для захвата товаров, предлагаемое в рассматриваемом варианте, содержит механизм 210 для захвата товаров, датчик 220 и модуль 230 определения глубины.
Датчик 220 установлен на механизме 210 для захвата товаров и конфигурирован для сбора измерительного сигнала, когда происходит выдвижение механизма 210 для захвата товаров. Модуль 230 определения глубины конфигурирован для определения глубины товарного контейнера в соответствии с измерительным сигналом. Механизм 210 для захвата товаров конфигурирован для захвата или установки на место товарного контейнера в соответствии с глубиной этого товарного контейнера. Эта глубина представляет собой длину товарного контейнера в направлении выдвижения механизма 210 для захвата товаров, когда механизм 210 для захвата товаров осуществляет захват контейнера. Модуль 230 определения глубины может быть интегрирован или построен на основе интегральной схемы, чипа или другого электронного устройства, такого как процессор в устройстве 200 для захвата товаров.
В частности, как показано на фиг. 2, устройство 200 для захвата товаров имеет центральную ось S1, расположенную горизонтально, а направление глубины товарного контейнера представляет собой направление, в котором проходит центральная ось S1. Датчик 220 может быть расположен в заданной позиции на свободном консольном конце «a» верхней поверхности механизма 210 для захвата товаров, и может также быть расположен в заданной позиции на свободном консольном конце «a» на внутренней поверхности механизма 210 для захвата товаров. Эту заданную позицию необходимо конкретно определять в соответствии с типом датчика. Свободным консольным концом «a» называется конец механизма 210 для захвата товаров, близкий к товарному контейнеру перед захватом. Модуль 230 определения глубины может быть расположен на конце механизма 210 для захвата товаров, удаленном от товарного контейнера, т.е. на конце, где располагается «корневая» часть «b» механизма для захвата товаров, быть электрически соединен с датчиком 220, принимать электрический сигнал от этого датчика 220, и определять глубину товарного контейнера в соответствии с измерительным сигналом.
В частности, механизм 210 для захвата товаров может быть в форме механической руки, а также может быть в форме вилки или в форме другой механической конструкции, которая может быть использована для захвата товарного контейнера.
Более того, устройство 200 для захвата товаров может перемещаться в вертикальном направлении, например, перемещаться на заданную высоту в соответствии с командой на перемещение. Эта заданная высота обычно представляет собой высоту, на которой находится позиция хранения, где расположен товарный контейнер, такую высоту, как высота, где установлена товарная табличка для позиции хранения. Например, перемещение устройства 200 для захвата товаров в вертикальном направлении может быть осуществлено путем подъема или опускания платформы, либо посредством подъема или опускания механизма. Более того, в соответствии с командой захвата устройство для захвата товаров заставляет механизм 210 для захвата товаров выдвигаться горизонтально вперед и запускает датчик 220 для сбора измерительного сигнала и передачи этого измерительного сигнала модулю 230 определения глубины. Модуль 230 определения глубины определяет глубину товарного контейнера в соответствии с измерительным сигналом.
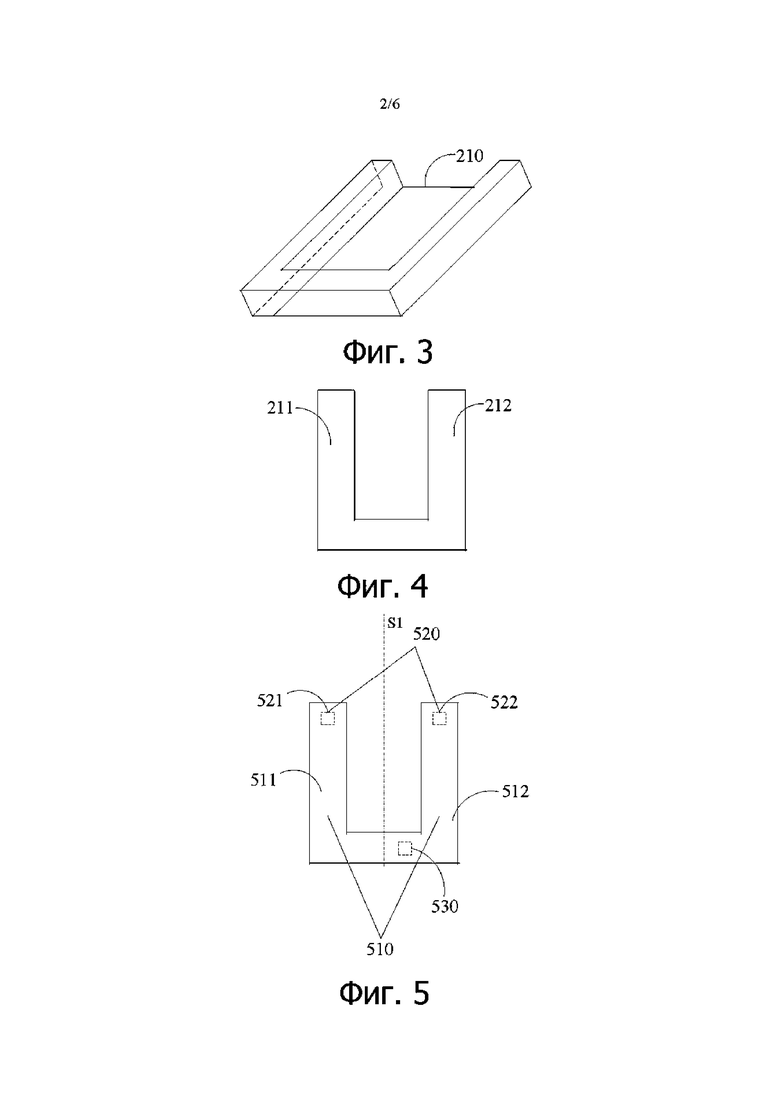
В частности, на фиг. 3 представлена упрощенная структурная схема механизма для захвата товаров в соответствии с вариантом, показанным на фиг. 2. Как показано на фиг. 3, механизм 210 для захвата товаров представляет собой интегрированную конструкцию, в частности, представляет собой прямоугольную конструкцию с открытой областью на одном конце, и, безусловно, может также иметь какую-либо другую форму. В вариантах настоящего изобретения это не ограничивается. В процессе захвата товарного контейнера, этот товарный контейнер помещают на механизм 210 для захвата товаров. На фиг. 4 представлена упрощенная структурная схема механизма для захвата товаров в соответствии с вариантом, показанным на фиг. 2. Как показано на фиг. 4, механизм 210 для захвата товаров может иметь левое плечо 211 и правое плечо 212, а в процессе захвата товарного контейнера этот товарный контейнер помещают между этими левым плечом 211 и правым плечом 212. Левое плечо 211 и правое плечо 212 расположены симметрично, могут быть изготовлены из одного и того же материала и могут иметь одинаковые размеры. Каждый из компонентов механизма 210 для захвата товаров - левое плечо 211 и правое плечо 212, может представлять собой телескопический механизм для захвата товаров и может содержать внутреннюю секцию и наружную секцию. Внутренняя секция плеча может быть установлена в наружной секции плеча, и при этом внутренняя секция плеча может перемещаться в направлении длины наружной секции плеча, т.е. перемещаться в направлении, в котором проходит упомянутая выше центральная ось S1, так что в результате происходит удлинение (выдвижение вперед) и сжатие (отведение назад) механизма для захвата товаров.
В частности, число датчиков 220 может быть равно 1, 2, 4 или другой величине. Такой датчик может представлять собой датчик для измерения расстояния, например, лазерный датчик для измерения расстояния или ультразвуковой датчик для измерения расстояния, и может быть расположен на внутренней стороне левого плеча 211 или правого плеча 212 в механизме 210 для захвата товаров, чтобы измерять расстояние между этими левым плечом 211 и правым плечом 212 в механизме 210 для захвата товаров. Кроме того, при захвате товарного контейнера измеряют расстояние между точкой механизма для захвата товаров, где расположен датчик для измерения расстояния, (левое плечо 211 или правое плечо 212) и товарным контейнером. Датчик дополнительно может представлять собой датчик пересечения луча, такой как фотоэлектрический датчик пересечения луча или инфракрасный датчик пересечения луча. В общем случае, датчик пересечения луча содержит группу или пару излучающего датчика и приемного датчика, которые могут быть расположены соответственно на левом плече 211 и на правом плече 212 механизма 210 для захвата товаров. Датчик может дополнительно представлять собой визуальный датчик, такой как двумерная (2D) видеокамера, видеокамера глубины или радар, и быть установлен на верхней поверхности механизма 210 для захвата товаров.
В качестве опции, модуль 230 определения глубины дополнительно конфигурирован для: получения, когда происходит изменение измерительного сигнала от сигнала по умолчанию к заданному сигналу о препятствии, первого состояния механизма для захвата товаров; получения, когда происходит изменение измерительного сигнала от заданного сигнала о препятствии к сигналу по умолчанию, второго состояния механизма для захвата товаров; и определения глубины товарного контейнера в соответствии с первым состоянием и вторым состоянием.
Сигнал по умолчанию может представлять собой соответствующий сигнал, когда датчик 220 не загорожен товарным контейнером. Например, сигнал по умолчанию может представлять собой сигнал, собранный датчиком 220, когда товарный контейнер не контактирует с механизмом 210 для захвата товаров, или товарный контейнер не располагается в рабочей области механизма 210 для захвата товаров, где рабочей областью механизма 210 для захвата товаров называется область между левым плечом 211 и правым плечом 212 этого механизма 210 для захвата товаров, либо область механизма 210 для захвата товаров, конфигурированная для осуществления захвата товарного контейнера. Тогда заданный сигнал о препятствии соответствует сигналу в ситуации, когда датчик 220 загорожен товарным контейнером. Например, указанный заданный сигнал о препятствии может представлять собой сигнал, собранный датчиком 220 в ситуации, когда товарный контейнер контактирует с механизмом 210 для захвата товаров, или товарный контейнер расположен в рабочей области механизма 210 для захвата товаров.
В частности, первое состояние может соответствовать выдвижению механизма 210 для захвата товаров на первую длину, а второе состояние может соответствовать выдвижению механизма 210 для захвата товаров на вторую длину. Соответственно, процедура определения глубины товарного контейнера согласно первому состоянию и второму состоянию содержит: определение глубины товарного контейнера в соответствии с величиной разности между первой длиной выдвижения и второй длиной выдвижения.
Более того, когда измерительный сигнал датчика 220 изменяется от заданного сигнала о препятствии к сигналу по умолчанию, т.е. датчик 220 переходит из состояния, когда он загорожен товарным контейнером, в состояние, когда он не загорожен товарным контейнером, это означает, что текущая длина выдвижения механизма для захвата товаров превосходит глубину этого товарного контейнера. В этом случае механизм 210 для захвата товаров может остановить операцию выдвижения, либо продолжить выдвижение вперед на заданную длину, чтобы облегчить остановку выдвижения; и захватить товарный контейнер, если будет принята команда захвата товарного контейнера. При использовании способа захвата товарного контейнера на основе результата измерения глубины этого товарного контейнера можно повысить степень адаптации и эффективности операции захвата товарного контейнера.
В устройстве для захвата товаров, предлагаемом в рассматриваемом варианте, на механизме для захвата товаров этого устройства для захвата товаров установлен датчик, а на основе измерительного сигнала, собранного этим датчиком, определяют, посредством модуля определения глубины, глубину товарного контейнера, так что можно осуществлять захват товарного контейнера и его установку на место в соответствии с глубиной этого товарного контейнера, и, таким образом, повышаются эффективность и безопасность захвата товарного контейнера и установки его на место, эффективно уменьшается вероятность повреждения и падения товарного контейнера во время помещения его на место и повышается степень интеллектуальности и эффективность работы складского робота.
В качестве опции, на фиг. 5 представлена упрощенная структурная схема устройства для захвата товаров, предлагаемого другим вариантом настоящего изобретения. В это варианте дополнительно датчики описываются на основе варианта, показанного на фиг. 2. Как показано на фиг. 5, устройство для захвата товаров содержит механизм 510 для захвата товаров, датчик 520 и модуль 530 определения глубины. Механизм 510 для захвата товаров содержит левое плечо 511 и правое плечо 512, расположенные симметрично. Датчик 520 представляет собой датчик пересечения луча, содержащий излучающий датчик 521 и приемный датчик 522. Эти излучающий датчик 521 и приемный датчик 522 расположены симметрично на левом плече 511 и на правом плече 512 механизма для захвата товаров 510.
Соответственно, заданный сигнал о препятствии соответствует выходному сигналу приемного датчика 522, когда этот приемный датчик 522 не принимает сигнал от излучающего датчика 521. Сигнал по умолчанию соответствует выходному сигналу приемного датчика 522, когда этот приемный датчик 522 принимает сигнал от излучающего датчика 521.
В частности, пара датчиков пересечения луча может представлять собой фотоэлектрический датчик пересечения луча, такой как инфракрасный датчик пересечения луча. Когда происходит выдвижение механизма 510 для захвата товаров, излучающий датчик 521 излучает сигнал датчика, такой как световой сигнал или инфракрасный сигнал, в направлении приемного датчика 522, а приемный датчик 522 принимает этот сигнал датчика и передает на выход измерительный сигнал. Если приемный датчик 522 может принимать сигнал датчика, измерительный сигнал, передаваемый на выход приемным датчиком, является основным сигналом, таким как сигнал высокого уровня. Однако если приемный датчик 522 не может принять сигнал датчика, измерительный сигнал, передаваемый на выход приемного датчика, представляет собой заданный сигнал о препятствии, такой как сигнал низкого уровня. Соответственно, модуль 530 определения глубины может определить глубину товарного контейнера на основе изменения измерительного сигнала, передаваемого на выход приемного датчика 522.
Кроме того, когда измерительный сигнал, принимаемый модулем 530 определения глубины, изменяется от заданного сигнала о препятствии к сигналу по умолчанию, модуль 530 определения глубины может дополнительно выдать команду остановки перемещения механизму 510 для захвата товаров. Механизм 510 для захвата товаров может остановить операцию выдвижения в ответ на эту команду остановки перемещения. Более того, модуль 530 определения глубины может дополнительно выдать выключающий сигнал компонентам датчика 520, чтобы выключить датчик 520.
В качестве опции, модуль 530 определения глубины дополнительно конфигурирован для: получения заданного расстояния выдвижения плеча; получения, если фактическое расстояние выдвижения плеча в механизме для захвата товаров достигло заданного расстояния выдвижения плеча, измерительного сигнала, передаваемого на выход датчиком; управления, если измерительный сигнал является основным сигналом, механизмом для захвата товаров для захвата товарного контейнера; и генерации, если измерительный сигнал представляет собой заданный сигнал о препятствии, информации об ошибке заданного расстояния выдвижения плеча.
В частности, если измерительный сигнал представляет собой заданный сигнал о препятствии, после генерации информации об ошибке заданного расстояния выдвижения плеча можно дополнительно продолжить управление механизмом для захвата товаров для выдвижения вперед до тех пор, пока измерительный сигнал не изменится и не станет основным сигналом, и тогда механизмом для захвата товаров управляют для захвата товарного контейнера.
Кроме того, модуль 530 определения глубины дополнительно конфигурирован для: приема заданного расстояния выдвижения плеча от складского робота или складской системы; получения, если фактическое расстояние выдвижения плеча механизма 510 для захвата товаров достигло заданного расстояния выдвижения плеча, измерительных сигналов, передаваемых на выход приемниками 522 датчиков; если измерительные сигналы, передаваемые на выход приемниками 522 датчиков, представляют собой основные сигналы, управления захватом товарного контейнера; и определения, если указанные измерительные сигналы представляют собой заданные сигналы о препятствии, что заданное расстояние выдвижения плеча не является правильным, так что не нужно захватывать товарный контейнер в соответствии с заданным расстоянием выдвижения плеча. В таком случае механизм 510 для захвата товаров может продолжать выдвижение дальше и получать измерительные сигналы, передаваемые на выход приемниками 522 датчиков, до тех пор, пока эти измерительные сигналы, передаваемые на выход приемниками 522 датчиков, не станут основными сигналами, и тогда осуществить захват товарного контейнера.
В рассматриваемом варианте глубину товарного контейнера определяют с использованием пары датчиков пересечения луча и модуля определения глубины, а последующие команды на захват и установку товарного контейнера на место выдают в соответствии с глубиной этого товарного контейнера, и таким образом, эффективность определения глубины оказывается высокой, чувствительность является высокой, стоимость является низкой, рассматриваемый вариант может быть легко реализован, а безопасность захвата и установки на место товарного контейнера повышена.
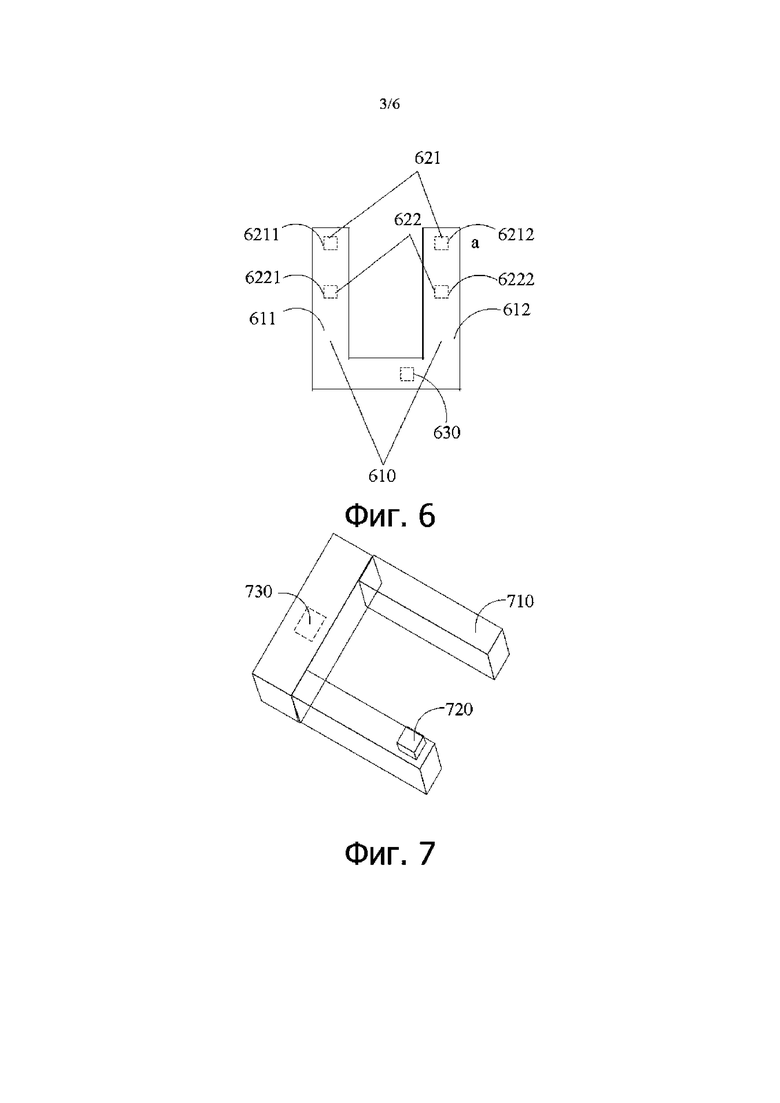
На фиг. 6 представлена упрощенная структурная схема устройства для захвата товаров, предлагаемого другим вариантом настоящего изобретения. Этот вариант дополнительно описывает датчики на основе вариантов, показанных на фиг. 2. Как показано на фиг. 6, устройство для захвата товаров содержит механизм 610 для захвата товаров, первый датчик 621 пересечения луча, второй датчик 622 пересечения луча и модуль 630 определения глубины.
Механизм 610 для захвата товаров содержит левое плечо 611 и правое плечо 612, расположенные симметрично. Датчики представляют собой две пары датчиков пересечения луча, и этими датчиками являются, в порядке увеличения расстояния от товарного контейнера, последовательно первый датчик 621 пересечения луча и второй датчик 622 пересечения луча. Первый датчик 621 пересечения луча содержит первый излучатель 6211 датчика и первый приемник 6212 датчика. Второй датчик 622 пересечения луча содержит второй излучатель 6221 датчика и второй приемник 6222 датчика. Первый излучатель 6211 датчика и второй излучатель 6221 датчика расположены на левом плече 611. Первый приемник 6212 датчика и второй приемник 6222 датчика расположены на правом плече 612 напротив соответствующих излучателей датчиков. Между первым датчиком 621 пересечения луча и вторым датчиком 622 пересечения луча поддерживается заданный промежуток. Модуль 630 определения глубины конфигурирован для определения глубины товарного контейнера в соответствии с указанным заданным промежутком и измерительными сигналами, собранными по меньшей мере двумя парами датчиков пересечения луча.
Заданный промежуток может представлять собой какой-либо фиксированный интервал и может иметь какую-либо величину по умолчанию, какую-либо величину, заданную пользователем или величину, определяемую в соответствии с размерами механизма 610 для захвата товаров, например, 10 см, 15 см или другую величину.
Следует понимать, что описание конструкции, показанной на фиг. 6, дано с использованием двух пар датчиков пересечения луча только в качестве примера. Здесь может быть также большее число пар датчиков пересечения луча такое как 3 пары датчиков, 4 пары датчиков и даже большее число пар датчиков. Каждый датчик пересечения луча содержит излучающий датчик и приемный датчик. Эти излучающий датчик и приемный датчик симметрично расположены на левом плече 611 и на правом плече 612 механизма 610 для захвата товаров, и при этом между двумя соседними группами датчиков пересечения луча присутствует заданный промежуток.
В частности, первый датчик 621 пересечения луча расположен на консольном свободном конце механизма 610 для захвата товаров. Этот консольный свободный конец механизма 610 для захвата товаров представляет собой конец механизма 610 для захвата товаров, близкий к товарному контейнеру. В некоторых вариантах, все датчики пересечения луча могут быть включены, когда происходит выдвижение левого плеча 611 и правого плеча 612, т.е. включаются первый датчик 621 пересечения луча и второй датчик 622 пересечения луча. В то же время, в других вариантах, когда левое плечо 611 и правое плечо 612 выдвигаются, происходит включение только первого датчика 621 пересечения луча, а другой датчик пересечения луча остается выключен. Если измерительный сигнал, передаваемый на выход первым приемным датчиком 6212 первого датчика 621 пересечения луча, изменяется от заданного сигнала о препятствии к сигналу по умолчанию, определяют, что выход выдвижения плеча текущего механизма 610 для захвата товаров удовлетворяет условию захвата товарного контейнера, и тогда запускают другой датчик пересечения луча, т.е. включают второй датчик 622 пересечения луча. Когда определено, что условие для захвата удовлетворяется, тогда если выходные сигналы первого приемного датчика 6212 и второго приемного датчика 6222 оба представляют собой сигнал по умолчанию, модуль 630 определения глубины определяет, что указанный заданный промежуток равен глубине товарного контейнера.
Кроме того, если система содержит больше двух, например N+1 (N не меньше 1), пар датчиков со сквозных лучом, когда определено, что условие захвата удовлетворяется, выходные сигналы приемных датчиков по меньшей мере из двух датчиков пересечения луча, представляют собой основные сигналы, M-ый приемный датчик является ближайшим приемным датчиком к первому приемному датчику 6212 среди приемных датчиков, выходные сигналы которых являются сигналами по умолчанию, M - положительное целое число не больше N, тогда модуль 630 определения глубины определяет, что величина (M-1)*L является глубиной товарного контейнера, где L представляет собой величину заданного промежутка.
В рассматриваемом варианте, глубину товарного контейнера определяют посредством создания нескольких пар датчиков пересечения луча и модуля определения глубины, так что последующими захватом и установкой на место товарного контейнера управляют в соответствии с глубиной этого товарного контейнера, и, таким образом, эффективность определения глубины оказывается высокой, этот вариант может быть легко реализован, а безопасность захвата и установки на место товарного контейнера повышена.
На фиг. 7 представлена упрощенная структурная схема устройства для захвата товаров, предлагаемого другим вариантом настоящего изобретения. Рассматриваемый вариант дополнительно описывает датчик на основе варианта, показанного на фиг. 2. Как показано на фиг. 7, устройство для захвата товаров содержит механизм 710 для захвата товаров, датчик 720 и модуль 730 определения глубины. Датчик 720 представляет собой визуальный датчик, такой как 2D-видеокамера, видеокамера глубины или фотографическое устройство, располагается на верхней поверхности механизма 710 для захвата товаров и конфигурирован для фотографирования измеренного изображения рабочей области механизма 710 для захвата товаров. Соответственно, модуль 730 определения глубины конфигурирован для определения глубины товарного контейнера в соответствии со шкалой полутонов (яркостью) измеренного изображения.
Кроме того, датчик 720 может представлять собой микро видеокамеру и объектив микро видеокамеры.
В частности, визуальный датчик конфигурирован для фотографирования измеренного изображения рабочей области механизма 710 для захвата товаров, т.е. измеренного изображения области, в которой механизм для захвата товаров производит захват товарного контейнера. Когда в рабочей области находится товарный контейнер, поле зрения визуального датчика может быть загорожено, так что сфотографированное измеренное изображение будет темным, т.е. яркость этого измеренного изображения мала. Может быть предварительно задана пороговая яркость. Если средняя яркость измеренного изображения меньше предварительно заданной пороговой яркости, это указывает на присутствие товарного контейнера в рабочей области механизма 710 для захвата товаров. Сигнал по умолчанию соответствует средней яркости измеренного изображения, превосходящей предварительно заданную пороговую яркость, и тогда заданный сигнал о препятствии соответствует средней яркости измеренного изображения ниже заданной пороговой яркости. Поэтому визуальный датчик может определить глубину товарного контейнера в соответствии с изменением средней яркости измеренного изображения. Если визуальный датчик представляет собой видеокамеру глубины, эта видеокамера глубины может быть использована для сбора данных облака точек в рабочей области механизма 710 для захвата товаров, и затем глубину товарного контейнера определяют на основе этих данных облака точек. Конкретный алгоритм определения аналогичен алгоритму для измеренного изображения, и может быть реализован в соответствии со средней величиной данных облака точек. Если эта средняя величина меньше заданной пороговой величины, это означает, что поле зрения загорожено и соответствует заданному сигналу о препятствии; а если эта средняя величина больше заданной пороговой величины, это означает, что поле зрения не загорожено и соответствует сигналу по умолчанию.
В рассматриваемом варианте глубину товарного контейнера определяют путем создания визуального датчика и модуля определения глубины, а последующую команду захвата и установки на место такого товарного контейнера выдают в соответствии с глубиной этого товарного контейнера, и, таким образом, эффективность определения глубины оказывается высокой, точность высока, этот вариант может быть легко реализован, а безопасность захвата и установки на место товарного контейнера повышена.
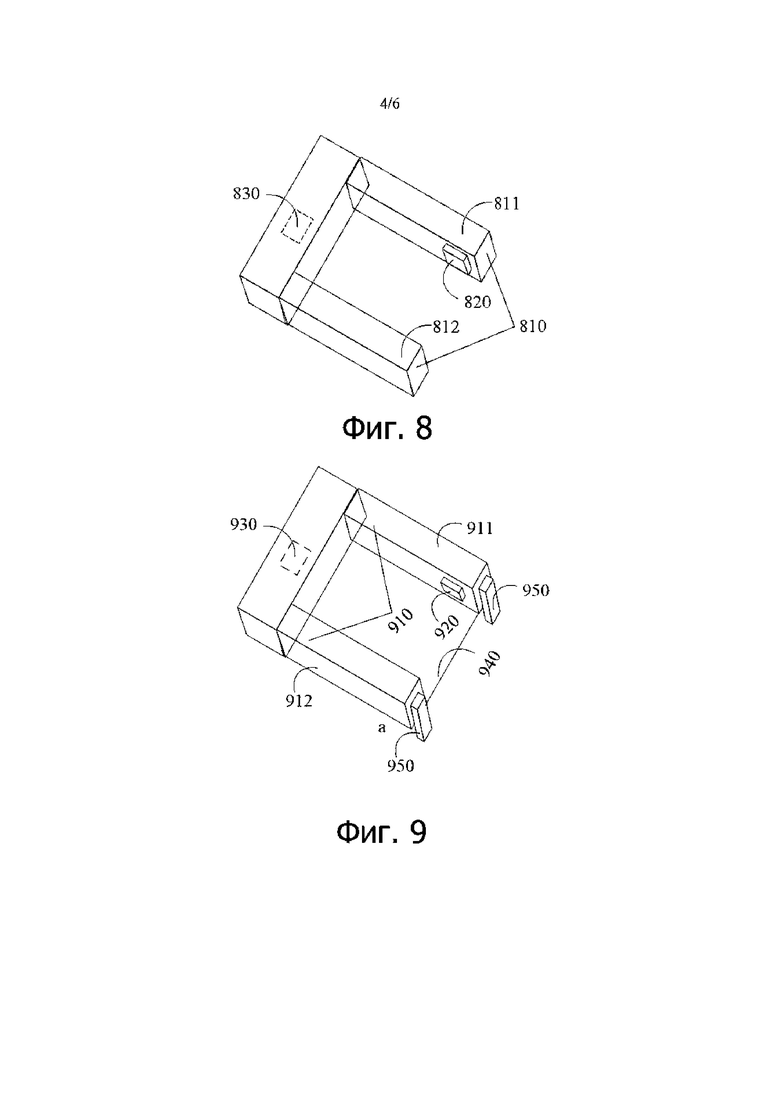
На фиг. 8 представлена упрощенная структурная схема устройства для захвата товаров, предлагаемого другим вариантом настоящего изобретения. Рассматриваемый вариант дополнительно описывает датчик на основе варианта, показанного на фиг. 2. Как показано на фиг. 8, устройство для захвата товаров содержит механизм 810 для захвата товаров, датчик 820 и модуль 830 определения глубины. Механизм 810 для захвата товаров содержит левое плечо 811 и правое плечо 812, расположенные симметрично. Датчик 820 представляет собой датчик для определения расстояния, расположенный на внутренней стороне левого плеча 811 или правого плеча 812. Фиг. 8 иллюстрирует пример, в котором датчик для измерения расстояния расположен на левом плече 811. Измерительный сигнал представляет измеренное расстояние, передаваемое на выход датчиком для измерения расстояния.
В частности, возможно наличие одного или нескольких датчиков для измерения расстояния, и такой датчик для измерения расстояния может быть ультразвуковым датчиком, радаром и т.п.
Если измеренное расстояние представляет собой расстояние между левым плечом 811 и правым плечом 812, это измеренное расстояние соответствует упомянутому выше сигналу по умолчанию. Однако если измеренное расстояние меньше расстояния между левым плечом 811 и правым плечом 812, это измеренное расстояние указывает расстояние между механизмом для захвата товаров, где расположен датчик для измерения расстояния, и товарным контейнером и соответствует приведенному выше заданному сигналу о препятствии. Поэтому модуль 830 определения глубины может определить глубину товарного контейнера в соответствии с изменением измеренного расстояния.
В рассматриваемом варианте глубину товарного контейнера определяют с использованием датчика для измерения расстояния и модуля определения глубины, а команду для последующего захвата и установки на место товарного контейнера выдают в соответствии с глубиной товарного контейнера, и, таким образом, эффективность определения глубины оказывается высокой, стоимость низкой, этот вариант может быть легко реализован, а безопасность захвата и установки на место товарного контейнера повышена.
На фиг. 9 представлена упрощенная структурная схема устройства для захвата товаров, предлагаемого в другом варианте настоящего изобретения. Рассматриваемый вариант дополнительно уточняет конструкцию механизма для захвата товаров на основе варианта, показанного на фиг. 2, увеличивает механизм толкающей штанги на консольном свободном конце механизма для захвата товаров и увеличивает плиту для временного хранения. Как показано на фиг. 9, устройство для захвата товаров, предлагаемое в рассматриваемом варианте, содержит механизм 910 для захвата товаров, датчик 920, модуль 930 определения глубины, плиту 940 для временного хранения и механизм 950 толкающей штанги. Механизм 910 для захвата товаров имеет левое плечо 911 и правое плечо 912.
Датчик 920 установлен на механизме 910 для захвата товаров и конфигурирован для сбора измерительного сигнала, когда происходит выдвижение механизма 910 для захвата товаров. Модуль 930 определения глубины конфигурирован для определения глубины товарного контейнера в соответствии с измерительным сигналом. Механизм 910 для захвата товаров конфигурирован для захвата или установки на место товарного контейнера согласно глубине этого товарного контейнера. Глубина представляет собой длину товарного контейнера в направлении выдвижения механизма 910 для захвата товаров, когда этот механизм для захвата товаров осуществляет захват контейнера. Плита 940 для временного хранения расположена между левым плечом 911 и правым плечом 912 и конфигурирована для временного хранения товарного контейнера. Механизм 950 толкающей штанги подвижно установлен на конце механизма 910 для захвата товаров, близком к товарному контейнеру, а после того, как механизм 910 для захвата товаров захватит товарный контейнер, этот механизм 950 толкающей штанги может повернуться внутрь в состояние перпендикулярности относительно внутренней боковой поверхности механизма 910 для захвата товаров.
В частности, плита 940 для временного хранения представляет собой прямоугольную плиту, расположенную горизонтально и параллельно центральной оси S1. Когда механизм 910 для захвата товаров захватывает товарный контейнер, этот механизм для захвата товаров может поместить этот товарный контейнер на плиту 940 для временного хранения, а после достижения целевой позиции переместить товарный контейнер, находящийся на плите 940 для временного хранения, на товарную полку склада, соответствующую целевой позиции, для хранения. Целевая позиция может представлять собой позицию, соответствующую буферному механизму складского робота, и может также быть позицией, соответствующей фиксированной товарной полке или позиции хранения в складской системе.
В частности, число механизмов 950 толкающей штанги может быть равно 2, 4, или другому числу. Фиг. 9 иллюстрирует пример, в котором имеется 2 механизма толкающей штанги. Механизмы 950 толкающей штанги расположены соответственно симметрично на свободных консольных концах «a» левого плеча 911 и правого плеча 912. В нерабочем состоянии механизмы 950 толкающей штанги ориентированы вертикально вниз или вертикально вверх, либо они помещены параллельно направлению высоты левого плеча 911 или правого плеча 912 механизма 910 для захвата товаров. Нерабочее состояние соответствует состоянию, в котором механизм 910 для захвата товаров не захватывает товарный контейнер. Механизмы 950 толкающей штанги могут поворачиваться относительно механизма 910 для захвата товаров и могут, в частности, поворачиваться вдоль центральной оси S1 механизма 910 для захвата товаров. Когда механизм 910 для захвата товаров осуществляет захват товарного контейнера в соответствии с командой захватить товарный контейнер, механизмы 950 толкающей штанги поворачиваются внутрь на 90 градусов до тех пор, пока не окажутся в состоянии перпендикулярности относительно внутренней боковой поверхности левого плеча 911 или правого плеча 912 механизма 910 для захвата товаров, и в этом случае механизмы 950 толкающей штанги находятся в рабочем состоянии. В частности, на фиг. 10 представлена упрощенная структурная схема устройства для захвата товаров, когда механизмы толкающей штанги находятся в рабочем состоянии в варианте, показанном на фиг. 9. Как показано на фиг. 10, при переходе в рабочее состояние механизмы 950 толкающей штанги поворачиваются внутрь до тех пор, пока не окажутся в состоянии перпендикулярности относительно внутренней боковой поверхности левого плеча 911 или правого плеча 912.
Дополнительно, когда устройство для захвата товаров инициализировано или начало перемещаться, может быть определено, в соответствии с измерительным сигналом от датчика 920, присутствует ли товарный контейнер на механизме 910 для захвата товаров. Если товарный контейнер присутствует на механизме 910 для захвата товаров, состояниями механизмов 950 толкающей штанги управляют таким образом, чтобы перевести эти механизмы в состояние перпендикулярности относительно внутренней боковой поверхности механизма 910 для захвата товаров с целью предотвратить тем самым падение товарного контейнера во время перемещения устройства для захвата товаров.
В частности, инициализация устройства для захвата товаров означает, что это устройство для захвата товаров начало работать или это устройство для захвата товаров перемещается или смещается.
В рассматриваемом варианте, в механизм для захвата товаров, содержащий левое плечо и правое плечо, введена плита для временного хранения товарного контейнера, а размеры механизмов толкающей штанги увеличены, и таким образом, степень безопасности во время перемещения товарного контейнера еще более повышена.
На фиг. 11 представлена логическая схема способа измерения глубины, предлагаемого одним из вариантов настоящего изобретения. Этот способ измерения глубины применяется в устройстве для захвата товаров в складском роботе и может быть осуществлен этим устройством для захвата товаров. Как показано на фиг. 11, способ измерения глубины содержит следующие операции.
На операции S1001, собирают измерительный сигнал посредством датчика в устройстве для захвата товаров, когда происходит выдвижение механизма для захвата товаров в этом устройстве для захвата товаров.
На операции S1002, определяют глубину товарного контейнера посредством модуля определения глубины в устройстве для захвата товаров в соответствии измерительным сигналом. Глубина представляет собой длину товарного контейнера в направлении выдвижения механизма для захвата товаров.
На операции S1003, товарный контейнер захватывают или ставят на место посредством механизма для захвата товаров в соответствии с глубиной этого товарного контейнера.
Процедура установки товарного контейнера на место в соответствии с глубиной этого товарного контейнера в частности содержит: установку товарного контейнера, в соответствии с глубиной этого товарного контейнера на буферный механизм складского робота или в центральную позицию на плите для временного хранения, или в глубокую позицию, тем самым предотвращая падение товарного контейнера во время перемещения складского робота из-за того, что контейнер поместили в неудачную позицию, либо предотвращая повреждение товаров внутри товарного контейнера из-за сжатия товарного контейнера во время установки на место.
В частности, товарный контейнер, имеющий небольшую глубину, необходимо поместить в насколько это возможно глубокую позицию на буферном механизме в соответствии с глубиной этого товарного контейнера, чтобы предотвратить скольжение товарного контейнера во время перемещения складского робота. В случае товарного контейнера, имеющего большую глубину, если такой товарный контейнер помещен на буферный механизм, необходимо предотвратить повреждение этого товарного контейнера и даже находящихся в нем товаров из-за того факта, что такой товарный контейнер подвергается сжатию вследствие необходимости проталкивать его на слишком большое расстояние при установке на место. Иными словами, для товарного контейнера, имеющего большую глубину, необходимо определить соответствующее расстояние проталкивания при установке на место согласно глубине этого товарного контейнера, тем самым предотвращая попадание такого товарного контейнера в центр буферного механизма при сдавливании этого товарного контейнера.
В качестве опции, механизм для захвата товаров содержит левое плечо и правое плечо, а процедура определения глубины товарного контейнера в соответствии с измерительным сигналом содержит: получение, если измерительный сигнал изменяется от сигнала по умолчанию к заданному сигналу о препятствии, первого состояния механизма для захвата товаров; получение, если измерительный сигнал изменяется от заданного сигнала о препятствии к сигналу по умолчанию, второго состояния механизма для захвата товаров; и определение глубины товарного контейнера в соответствии с первым состоянием и вторым состоянием.
В качестве опции, датчик содержит пару датчиков пересечения луча. Пара датчиков пересечения луча представляет собой излучающий датчик и приемный датчик. Эти излучающий датчик и приемный датчик расположены симметрично на левом плече и на правом плече. Заданный сигнал о препятствии соответствует выходному сигналу приемного датчик, когда этот приемный датчик не принимает сигнал от излучающего датчик. Сигнал по умолчанию соответствует выходному сигналу приемного датчик, когда этот приемный датчик принимает сигнал от излучающего датчик.
В качестве опции, датчик содержит по меньшей мере две пары датчиков пересечения луча. Каждая пара датчиков пересечения луча расположена симметрично на левом плече и правом плече. Более того, между двумя соседними группами датчиков пересечения луча, имеется заданный промежуток. Процедура определения глубины товарного контейнера в соответствии с измерительным сигналом содержит: определение глубины товарного контейнера в соответствии с заданным промежутком и измерительными сигналами, собранными по меньшей мере двумя парами датчиков пересечения луча.
В качестве опции, датчик представляет собой визуальный датчик. Этот визуальный датчик расположен на верхней поверхности механизма для захвата товаров. Процедура сбора датчиком в устройстве для захвата товаров измерительного сигнала, когда происходит выдвижение механизма для захвата товаров в устройстве для захвата товаров, содержит: фотографирование, посредством визуального датчика, измеренного изображения рабочей области механизма для захвата товаров, когда происходит выдвижение этого механизма для захвата товаров в устройстве для захвата товаров. Соответственно, процедура определения глубины товарного контейнера согласно измерительному сигналу содержит: определение глубины товарного контейнера в соответствии с измеренным изображением.
В качестве опции, датчик представляет собой датчик для измерения расстояния. Этот датчик для измерения расстояния расположен на внутренней стороне левого плеча или правого плеча. Процедура сбора, датчиком в устройстве для захвата товаров, измерительного сигнала, когда происходит выдвижение механизма для захвата товаров, в устройстве для захвата товаров, содержит: сбор, датчиком для измерения расстояния, измеренного расстояния, когда происходит выдвижение механизма для захвата товаров, в устройстве для захвата товаров. Соответственно, процедура определения глубины товарного контейнера согласно измерительному сигналу содержит: определение глубины товарного контейнера на основе измеренного расстояния.
В качестве опции, механизм для захвата товаров дополнительно содержит механизм толкающей штанги. Этот механизм толкающей штанги подвижно установлен на одном конце механизма для захвата товаров близко к товарному контейнеру. После определения глубины товарного контейнера в соответствии с измерительным сигналом, способ измерения глубины дополнительно содержит: управление механизмом толкающей штанги для поворота его внутрь в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров; и захват товарного контейнера в соответствии с глубиной этого товарного контейнера.
В качестве опции, после захвата товарного контейнера в соответствии с глубиной этого товарного контейнера, способ дополнительно содержит: помещение, в соответствии с глубиной товарного контейнера, этого товарного контейнера на буферный механизм складского робота.
На основе найденных величин глубины, определяют разные расстояния проталкивания для товарных контейнеров, имеющих разную глубину, так что такие товарные контейнеры, имеющие разную глубину, могут быть помещены в безопасные позиции в предположении, что эти товарные контейнеры не повреждаются, и таким образом, повышается степень безопасности товарных контейнеров при перемещении.
В качестве опции, способ измерения глубины дополнительно содержит: определение, в соответствии с измерительным сигналом, когда устройство для захвата товаров инициализировано, присутствует ли товарный контейнер на механизме для захвата товаров в устройстве для захвата товаров; и если присутствует товарный контейнер на механизме для захвата товаров, управление механизмом толкающей штанги для поворота его внутрь в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров.
В частности, инициализация устройства для захвата товаров может состоять в том, что это устройство для захвата товаров начинает работать, или это устройство для захвата товаров перемещается.
В качестве опции, после определения глубины товарного контейнера в соответствии с измерительным сигналом, способ дополнительно содержит: получение, модулем определения глубины, заданного расстояния выдвижения плеча; получение, если фактическое расстояние выдвижения плеча в механизме для захвата товаров достигло заданного расстояния выдвижения плеча, измерительного сигнала, передаваемого на выход датчиком; управление, если измерительный сигнал представляет собой сигнал по умолчанию, механизмом для захвата товаров с целью захватить товарный контейнер в соответствии с глубиной этого товарного контейнера; и генерацию, если измерительный сигнал представляет собой заданный сигнал о препятствии, информации об ошибке заданного расстояния выдвижения плеча.
На фиг. 12 представлена упрощенная структурная схема складского робота, предлагаемого в одном из вариантов настоящего изобретения. Как показано на фиг. 12, складской робот содержит подвижное шасси 1110 и устройство 1120 для захвата товаров.
Устройство 1120 для захвата товаров представляет собой устройство для захвата товаров, предлагаемое каким-либо одним из вариантов, соответствующих Фиг. 2 - 10 настоящего изобретения, и это устройство соединено с подвижным шасси 1110 и конфигурировано для захвата или установки на место товарного контейнера согласно глубине этого товарного контейнера.
В качестве опции, складской робот дополнительно содержит: буферный механизм 1130, установленный на подвижном шасси 1110 и конфигурированный для помещения на него товарного контейнера; и соответственно, устройство 1120 для захвата товаров для установки товарного контейнера на буферный механизм 1130 согласно глубине этого товарного контейнера.
Буферный механизм 1130 может в частности иметь форму задней корзины.
На фиг. 13 представлена упрощенная структурная схема складского робота, предлагаемого одним из вариантов настоящего изобретения. Как показано на фиг. 13, этот складской робот содержит запоминающее устройство 1210, процессор 1220 и компьютерную программу.
Компьютерная программа сохраняется в запоминающем устройстве 1210 и конфигурирована для выполнения процессором 1220, чтобы реализовать способ измерения глубины согласно варианту, соответствующему фиг. 11 в настоящем изобретении.
Запоминающее устройство 1210 и процессор 1220 соединены шиной 1230.
Соответствующее описание можно понять со ссылками на относящие к делу иллюстрации и эффекты, соответствующие этапам, показанным на фиг. 10, так что здесь это снова приведено не будет.
На фиг. 14 представлена упрощенная структурная схема складской системы, предлагаемой одним из вариантов настоящего изобретения. Как показано на фиг. 14, эта складская система содержит складского робота 1310, товарную полку 1320 и модуль 1330 управления складами.
Товарный контейнер 1321 помещен на товарную полку 1320, или его необходимо поместить на эту товарную полку 1320. Складской робот 1310 представляет собой складского робота, предлагаемого каким-либо одним из вариантов, соответствующих фиг. 12 и фиг. 13 настоящего изобретения. Этот складской робот 1310 соединен с модулем 1330 управления складами и конфигурирован для приема команды от этого модуля управления складами, где эта команда содержит информацию о товарном контейнере, который необходимо захватить или поместить на хранение, и складской робот перемещается в заданную позицию в соответствии с командой от модуля 1330 управления складами, и захватывает или ставит на место товарный контейнер.
Один из вариантов настоящей заявки предлагает читаемый компьютером носитель для хранения информации, имеющий сохраненную на нем компьютерную программу. При выполнении этой компьютерной программы процессором осуществляется способ измерения глубины, предлагаемый вариантом, соответствующим фиг. 11 настоящего изобретения.
Этот читаемый компьютером носитель для хранения информации может представлять собой постоянное запоминающее устройство (ПЗУ (ROM)), запоминающее устройство с произвольной выборкой (ЗУПВ (RAM)), устройство CD-ROM, магнитную ленту, гибкий диск, оптическое устройство для хранения данных или другой подобный носитель.
Следует понимать, что описываемые устройство и способ, предлагаемые в вариантах настоящего изобретения, могут быть осуществлены другими методами. Например, варианты устройства, описываемые выше, являются всего лишь примерами. Например, разбиение на модули представляет собой просто разбиение логических функций, так что при фактической реализации может иметь место другое разбиение. Например, несколько модулей или компонентов могут быть комбинированы или интегрированы в другой системе, либо некоторые признаки можно игнорировать или не осуществлять. В дополнение к этому, представленные здесь либо обсуждаемые взаимосвязи или прямые соединения или соединения связи могут быть реализованы некоторыми интерфейсами. Непрямые соединения или соединения связи между устройствами или модулями могут иметь электрические, механические или другие формы.
Специалисты в рассматриваемой области могут легко предложить другие решения для реализации настоящего изобретения после изучения описания и практического осуществления описываемого здесь изобретения. Настоящее изобретение должно охватывать любые вариации, функции или адаптивные изменения настоящего изобретения. Эти вариации, функции или адаптивные изменения соответствуют общим принципам настоящего изобретения и содержат общепринятые знания и общепринятые технические средства, известные в технике, но не описываемые в настоящем изобретении. Приведенное здесь описание и варианты представляют собой просто примеры, а фактический объем и смысл настоящего изобретения указаны в Формуле изобретения.
Следует понимать, что настоящее изобретение не исчерпывается точно той структурой, которая описана выше и показана на чертежах, и может быть модифицировано и изменено любым способом, не отклоняющимся от объема изобретения. Объем настоящего изобретения ограничен только прилагаемой формулой изобретения.
Изобретение относится к складским системам. Складская система содержит полку, модуль управления и робота с шасси и устройством для захвата товаров. Устройство содержит механизм для захвата товаров, датчик и модуль определения глубины. Датчик расположен на механизме и сконфигурирован для сбора измерительного сигнала, когда происходит выдвижение механизма. Измерительный сигнал содержит один из сигнала по умолчанию и заданного сигнала о препятствии. Сигнал по умолчанию представляет собой сигнал в случае, если датчик не загорожен контейнером, а заданный сигнал - если загорожен. Модуль определения глубины сконфигурирован для определения глубины контейнера в соответствии с измерительным сигналом. Механизм сконфигурирован для захвата или установки на место контейнера в соответствии с глубиной этого контейнера. Глубина представляет собой длину контейнера в направлении выдвижения механизма. Модуль определения глубины дополнительно сконфигурирован для получения заданного расстояния выдвижения плеча, получения измерительного сигнала, передаваемого на выход датчиком, управления механизмом с целью захвата контейнера и генерации информации об ошибке заданного расстояния выдвижения плеча. Достигается повышение степени безопасности при установке товарного контейнера на место. 6 н. и 17 з.п. ф-лы, 14 ил.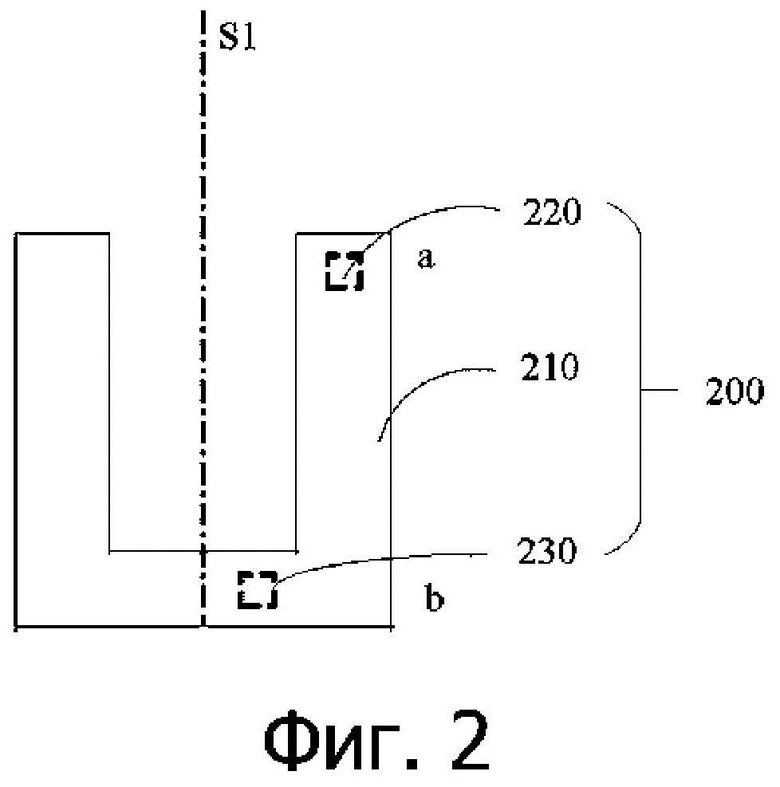
1. Устройство для захвата товаров, содержащее: механизм для захвата товаров, датчик и модуль определения глубины;
в котором датчик расположен на механизме для захвата товаров, при этом датчик конфигурирован для сбора измерительного сигнала, когда происходит выдвижение механизма для захвата товаров; в котором измерительный сигнал содержит один из сигнала по умолчанию и заданного сигнала о препятствии, сигнал по умолчанию представляет собой соответствующий сигнал в случае, если датчик не загорожен товарным контейнером, а заданный сигнал о препятствии представляет собой соответствующий сигнал в случае, если датчик загорожен товарным контейнером;
в котором модуль определения глубины конфигурирован для определения глубины товарного контейнера в соответствии с измерительным сигналом; в котором
механизм для захвата товаров конфигурирован для захвата или установки на место товарного контейнера в соответствии с глубиной этого товарного контейнера,
в котором глубина представляет собой длину товарного контейнера в направлении выдвижения механизма для захвата товаров;
в котором модуль определения глубины дополнительно конфигурирован для:
получения заданного расстояния выдвижения плеча;
получения, если фактическое расстояние выдвижения плеча в механизме для захвата товаров достигло заданного расстояния выдвижения плеча, измерительного сигнала, передаваемого на выход датчиком;
управления, если измерительный сигнал представляет собой сигнал по умолчанию, механизмом для захвата товаров с целью захвата товарного контейнера; и
генерации, если измерительный сигнал представляет собой заданный сигнал о препятствии, информации об ошибке заданного расстояния выдвижения плеча.
2. Устройство для захвата товаров по п. 1, в котором механизм для захвата товаров содержит левое плечо и правое плечо, в котором левое плечо и правое плечо расположены симметрично;
в котором датчик расположен на по меньшей мере одном из левого плеча и правого плеча.
3. Устройство для захвата товаров по п. 2, в котором модуль определения глубины в частности конфигурирован для:
получения, когда измерительный сигнал изменяется от сигнала по умолчанию к заданному сигналу о препятствии, первого состояния механизма для захвата товаров;
получения, когда измерительный сигнал изменяется от заданного сигнала о препятствии к сигналу по умолчанию, второго состояния механизма для захвата товаров; и
определения глубины товарного контейнера в соответствии с первым состоянием и вторым состоянием.
4. Устройство для захвата товаров по п. 3, в котором первое состояние содержит первую длину выдвижения механизма для захвата товаров, а второе состояние содержит вторую длину выдвижения механизма для захвата товаров, в котором модуль определения глубины дополнительно сконфигурирован для определения глубины товарного контейнера в соответствии с разницей значения между первой длиной выдвижения и второй длиной выдвижения.
5. Устройство для захвата товаров по п. 3, в котором датчик содержит пару датчиков пересечения луча; в котором эта пара датчиков пересечения луча содержит излучающий датчик и приемный датчик; в котором эти излучающий датчик и приемный датчик расположены симметрично на левом плече и правом плече;
в котором заданный сигнал о препятствии представляет собой выходной сигнал приемного датчика, когда этот приемный датчик не принимает сигнал от излучающего датчика; и
в котором сигнал по умолчанию представляет собой выходной сигнал приемного датчика, когда этот приемный датчик принимает сигнал от излучающего датчика.
6. Устройство для захвата товаров по п. 2, в котором датчик содержит по меньшей N+1 пар датчиков пересечения луча; в котором каждая пара датчиков пересечения луча симметрично расположена на левом плече и правом плече, а между двумя соседними группами датчиков пересечения луча образован заданный промежуток, где N больше или равно 1; и
в котором модуль определения глубины конфигурирован для:
определения, когда выходные сигналы приемных датчиков по меньшей мере двух пар датчиков пересечения лучей являются сигналами по умолчанию, а M-й приемный датчик является ближайшим приемным датчиком к первому приемному датчику среди приемных датчиков, выходные сигналы которых являются сигналами по умолчанию, (M-1)*L как глубину товарного контейнера, где M представляет собой положительное целое число, меньшее или равное N, L представляет собой величину заданного промежутка, а первый приемный датчик представляет собой приемный датчик, расположенный на конце механизма для захвата товаров в направлении выдвижения механизма для захвата товаров.
7. Устройство для захвата товаров по п. 1, в котором датчик представляет собой визуальный датчик; этот визуальный датчик расположен на верхней поверхности механизма для захвата товаров; и измерительный сигнал представляет собой измеренное изображение рабочей области механизма для захвата товаров, сфотографированное визуальным датчиком.
8. Устройство для захвата товаров по п. 2, в котором датчик представляет собой датчик для измерения расстояния; в котором этот датчик для измерения расстояния расположен на внутренней стороне левого плеча или правого плеча; а измерительный сигнал представляет измеренное расстояние, передаваемое на выход датчиком для измерения расстояния.
9. Устройство для захвата товаров по какому-либо одному из пп. 1-8, в котором механизм для захвата товаров содержит механизм толкающей штанги; в котором этот механизм толкающей штанги подвижно установлен на конце механизма для захвата товаров в направлении выдвижения механизма для захвата товаров;
в котором после того, как модуль определения глубины определяет глубину товарного контейнера, механизм толкающей штанги конфигурирован для поворота в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров.
10. Способ измерения глубины, выполняемый устройством для захвата товаров в складском роботе, причем устройство для захвата товаров содержит механизм для захвата товаров, датчик и модуль определения глубины;
при этом способ содержит:
сбор, датчиком, измерительного сигнала, когда происходит выдвижение механизма для захвата товаров; в котором измерительный сигнал содержит один из сигнала по умолчанию и заданного сигнала о препятствии, сигнал по умолчанию представляет собой соответствующий сигнал в случае, если датчик не загорожен товарным контейнером, а заданный сигнал о препятствии представляет собой соответствующий сигнал в случае, если датчик загорожен товарным контейнером;
определение, посредством модуля определения глубины, глубины товарного контейнера в соответствии с измерительным сигналом; и
захват или установка на место механизмом для захвата товаров товарного контейнера согласно глубине этого товарного контейнера;
в котором глубина представляет собой длину товарного контейнера в направлении выдвижения механизма для захвата товаров;
в котором способ дополнительно содержит:
получение, модулем определения глубины, заданного расстояния выдвижения плеча;
получение, если фактическое расстояние выдвижения плеча в механизме для захвата товаров достигло заданного расстояния выдвижения плеча, измерительного сигнала, передаваемого на выход датчиком;
управление, когда измерительный сигнал представляет собой сигнал по умолчанию, механизмом для захвата товаров с целью захватить товарный контейнер в соответствии с глубиной этого товарного контейнера; и
генерацию, когда измерительный сигнал представляет собой заданный сигнал о препятствии, информации об ошибке заданного расстояния выдвижения плеча.
11. Способ по п. 10, в котором механизм для захвата товаров содержит левое плечо и правое плечо, в котором определение глубины товарного контейнера в соответствии с измерительным сигналом содержит:
получение, когда измерительный сигнал изменяется от сигнала по умолчанию к заданному сигналу о препятствии, первого состояния механизма для захвата товаров;
получение, когда измерительный сигнал изменяется от заданного сигнала о препятствии к сигналу по умолчанию, второго состояния механизма для захвата товаров; и
определения глубины товарного контейнера в соответствии с первым состоянием и вторым состоянием.
12. Способ по п. 11, в котором датчик содержит пару датчиков пересечения луча; в котором эта пара датчиков пересечения луча содержит излучающий датчик и приемный датчик; в котором эти излучающий датчик и приемный датчик симметрично расположены на левом плече и на правом плече; заданный сигнал о препятствии представляет собой выходной сигнал приемного датчика, когда этот приемный датчик не принимает сигнал от излучающего датчик; и
в котором сигнал по умолчанию представляет собой выходной сигнал приемного датчика, когда этот приемный датчик принимает сигнал от излучающего датчика.
13. Способ по п. 10, в котором механизм для захвата товаров содержит левое плечо и правое плечо; в котором датчик содержит по меньшей мере две пары датчиков пересечения луча; в котором каждая пара датчиков пересечения луча симметрично расположена на левом плече и правом плече, а между двумя соседними группами датчиков пересечения луча образован заданный промежуток;
в котором определение глубины товарного контейнера в соответствии с измерительным сигналом содержит:
определение глубины товарного контейнера в соответствии с заданным промежутком и измерительными сигналами, собранными по меньшей мере двумя парами датчиков пересечения луча.
14. Способ по п. 10, в котором датчик представляет собой визуальный датчик; этот визуальный датчик расположен на верхней поверхности механизма для захвата товаров;
в котором сбор, посредством датчика, измерительного сигнала, когда происходит выдвижение механизма для захвата товаров, содержит:
фотографирование, посредством визуального датчика, измеренного изображения рабочей зоны механизма для захвата товаров, когда происходит выдвижение механизма для захвата товаров;
в котором определение глубины товарного контейнера, согласно измерительному сигналу, содержит:
определение глубины товарного контейнера в соответствии с измеренным изображением.
15. Способ по п. 10, в котором механизм для захвата товаров содержит левое плечо и правое плечо; в котором датчик представляет собой датчик для измерения расстояния; в котором этот датчик для измерения расстояния расположен на внутренней стороне левого плеча или правого плеча;
в котором сбор, посредством датчика, измерительного сигнала, когда происходит выдвижение механизма для захвата товаров, содержит:
сбор, посредством датчика для измерения расстояния, измеренного расстояния, когда происходит выдвижение механизма для захвата товаров;
в котором определение глубины товарного контейнера, согласно измерительному сигналу, содержит:
определение глубины товарного контейнера в соответствии с измеренным расстоянием.
16. Способ по какому-либо одному из пп. 10-15, в котором механизм для захвата товаров содержит механизм толкающей штанги; в котором этот механизм толкающей штанги подвижно установлен на конце механизма для захвата товаров в направлении выдвижения механизма для захвата товаров;
в котором после определения глубины товарного контейнера в соответствии с измерительным сигналом, этот способ содержит:
управление механизмом толкающей штанги для поворота в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров.
17. Способ по какому-либо одному из пп. 10-15, в котором этап захвата или установки на место товарного контейнера согласно глубине этого товарного контейнера содержит:
захват, механизмом для захвата товаров, товарного контейнера согласно глубине этого товарного контейнера;
в котором после захвата товарного контейнера в соответствии с глубиной этого товарного контейнера, этот способ содержит:
помещение, в соответствие с глубиной товарного контейнера, этого товарного контейнера на буферный механизм складского робота.
18. Способ по п. 16, дополнительно содержащий:
определение, в соответствии с измерительным сигналом, когда устройство для захвата товаров инициализировано, присутствует ли товарный контейнер на механизме для захвата товаров;
в котором управление механизмом толкающей штанги с целью поворота его внутрь в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров, содержит:
определение, что товарный контейнер присутствует на механизме для захвата товаров;
на основании определения, что товарный контейнер присутствует на механизме для захвата товаров, управление механизмом толкающей штанги для поворота его внутрь в состояние перпендикулярности относительно внутренней боковой поверхности механизма для захвата товаров.
19. Складской робот, содержащий подвижное шасси и устройство для захвата товаров по какому-либо одному из пп. 1-9, где устройство для захвата товаров соединено с подвижным шасси и конфигурировано для захвата или установки на место товарного контейнера в соответствии с глубиной этого товарного контейнера.
20. Складской робот по п. 19, дополнительно содержащий:
буферный механизм, установленный на подвижном шасси и конфигурированный для помещения на него товарного контейнера;
в котором устройство для захвата товаров, конфигурировано для:
помещения товарного контейнера на буферный механизм в соответствии с глубиной этого товарного контейнера.
21. Складская система, содержащая складского робота по п. 19 или 20, товарную полку и модуль управления складами;
в которой складской робот соединен с возможностью связи с модулем управления складами;
в котором подвижное шасси конфигурировано для перемещения, в соответствии с командой от модуля управления складами, в позицию, где расположен товарный контейнер, и механизм для захвата товаров конфигурирован для захвата товарного контейнера в соответствии с глубиной товарного контейнера, где этот товарный контейнер помещен на товарную полку.
22. Складская система, содержащая складского робота по п. 19 или 20, товарную полку и модуль управления складами;
в которой складской робот соединен с возможностью связи с модулем управления складами;
в котором подвижное шасси конфигурировано для перемещения, в соответствии с командой от модуля управления складами, в позицию, где должен быть расположен товарный контейнер, и механизм для захвата товаров конфигурирован для установки на место товарного контейнера в соответствии с глубиной товарного контейнера.
23. Читаемый компьютером носитель для хранения информации, сохраняющий выполняемые компьютером команды, где эти выполняемые компьютером команды конфигурированы для того, чтобы при выполнении этих команд процессором осуществлять способ измерения глубины по какому-либо одному из пп. 10-18.
| CN 111348361 A, 30.06.2020 | |||
| CN 111017460 A, 17.04.2020 | |||
| CN 111348362 A, 30.06.2020 | |||
| CN 109186461 A, 11.01.2019 | |||
| JP 2015040126 A, 02.03.2015 | |||
| СИСТЕМА ДЛЯ ОБРАЗОВАНИЯ РЯДОВ УПАКОВОК, УКЛАДЫВАЕМЫХ НА ПОДДОНЫ, И УСТАНОВКА ДЛЯ УКЛАДЫВАНИЯ УПАКОВОК НА ПОДДОНЫ | 2010 |
|
RU2551405C2 |
