Изобретение относится к судостроению, конкретно к автономным необитаемым подводным самоходным аппаратам (планерам-глайдерам), и может быть использована для исследования водных акваторий.
Известен подводный планер (Лопота А.В., Николаев А.Б. «Морские робототехнические комплексы военного и специального назначения», СПб., Издательство ЦНИИ РТК, 2016 г., стр. 16-17 [1]). Перемещение планера-глайдера в водной среде по глубине осуществляется за счет изменения знака плавучести. Для этого планер-глайдер оснащен системой автоматического управления плавучестью которая формирует управляющие воздействия в виде изменения величины и знака плавучести планера-глайдера. Система управления плавучестью состоит из балластной цистерны, размещенной в прочном корпусе планера-глайдера, эластомерной емкости в проницаемой части, электромагнитных клапанов и гидронасоса рабочей жидкости. Водоизмещение аппарата может управляемо меняться при откачке рабочей жидкости из балластной цистерны в эластичную емкость или, наоборот, подаче жидкости из емкости в цистерну, приводя к изменению плавучести. При спуске на воду планер-глайдер постепенно погружается по пологой наклонной траектории со средней скоростью 0,8 узла. Затем он всплывает по восходящей к поверхности траектории и далее цикл повторяется.
Известны аналогичные технические решения, представляющее собой подводные планеры (полезная модель RU №124245 U1, 2012 г. [2], патент RU №2490164 U1, 2012 г. [3], полезная модель RU №183537 U1, 2018 г. [4], патенты RU №2669244, 2017 [5], RU №164034 U1, 20.08.2016 [6], заявка US №2009241826 А1, 01.10.2009 [7], патенты JP Н1059282 А, 03.03.1998 [8], RU №2669244 С1, 09.10.2018 [9], заявка KR 20160015935 А, 15.02.2016 [10], патент RU №2490164 С1, 20.08.2013 [11]).
При этом, например известный автономный подводный необитаемый аппарат планирующего типа (планер-глайдер), содержащий корпус с крылом, систему изменения плавучести, систему изменения угла дифферента, систему изменения угла крена [6] осуществляет не только изменения плавучести, но и изменения дифферента за счет перемещения аккумуляторной батареи вдоль оси аппарата, что обеспечивает оптимальный угол наклона крыла планера-глайдера при его движении в водной среде.
Недостатком технического решения [6], является необходимость не только в регулировке плавучести аппарата, но и необходимости изменения его дифферента, что увеличивает энергопотребление аппарата и усложняет его конструкцию, в то время как главным преимуществом подводного планера-глайдера является простота его конструкции (по сравнению с подводными аппаратами традиционного типа) за счет обеспечения движения в водной среде без использования движителя.
Устранение указанного недостатка, а именно - максимальное упрощение конструкции подводного планера-глайдера, снижение его энергопотребления для увеличения автономности реализовано в известном техническом решении (патент RU №207065 U1, 11.10.2021 [12]), который содержит корпус, горизонтальные рули и привод их разворота в горизонтальной плоскости, соединенный с датчиком глубины погружения.
Отличительные признаки известного технического решения [12], в котором горизонтальные рули установлены под углом к основной плоскости подводного планера-глайдера, закреплены к верхней части его корпуса и снабжены приводом разворота в горизонтальной плоскости на 180° соединенным с датчиком глубины погружения обеспечивают достижение заявленного положительного эффекта - упрощение конструкции и снижение энергопотребления аппарата.
Однако, при проведении подводных работах, направленных на обследование подводных коммуникаций, проведение изыскательских и геофизических подводных исследований с использованием планера-глайдера необходимо также реализовать режим зависания, что известными техническими решениями не обеспечивается, в том числе и известным техническим решением [12].
Известны также подводные аппараты, представляющие собой подводные лодки. Так, например, известная американская атомная подводная лодка "Тритон" (SSRN-586), имеющая кормовую оконечность, содержащую прочный корпус, гребные валы с гребными винтами, а также главные упорные подшипники и дейдвуды в кормовом отсеке. (Быховский И.А. Атомные суда. Ленинград, 1961 г., стр. 121-128, 144, табл. 13/3-я строка сверху [13]).
Недостатком этого подводного аппарата является то, что его кормовая оконечность не приспособлена для размещения в ней дополнительного оборудования контроля и защиты кормовой полусферы как из-за отсутствия необходимой площади для размещения, так и невозможности обеспечить условия для работы аппаратуры обнаружения. В также известной конструкции дизельная подводная лодка проекта 877 (Класс "Kilo" - "Варшавянка") (см. Справочник "Военные корабли СССР и России", г. Якутск, изд. 1995 г., стр. 44 [14]), имеет кормовую оконечность с кормовым отсеком, через которые насквозь проходит линия вала, а гребной винт расположен кормовее по отношению к кормовым рулям.
Недостатком данной кормовой оконечности является конструктивная неприспособленность для размещения в ней дополнительных акустических и неакустических средств контроля за наиболее уязвимой кормовой полусферой пространства за подводной лодкой, систем подводной радиосвязи с выпускаемой антенной и средств активной и пассивной защиты от телеуправляемого и самонаводящегося оружия противника.
Известно также устройство, представляющее собой кормовую оконечность, которая имеет прочный и легкий корпуса, кормовой отсек, гребной винт со ступицей, гребной вал с подшипниками, гребной электродвигатель, дейдвуд, кормовые рули с приводами, устройства для выпуска буксируемых антенн. Гребной винт подвижно насажен на прочный корпус подводной лодки в районе, например, кормового отсека. Для этого в легком корпусе имеется разрыв. Гребной винт выполнен со ступицей большого диаметра, причем ступица совпадает по своему диаметру и контуру с образующей линией легкого корпуса подводной лодки в месте установки гребного винта. Упор от гребного винта на прочный корпус передается через кольцевые конструкции ступицы. Упорные и опорные поверхности как прочной конструкции, принадлежащие прочному корпусу, так и ступице гребного винта покрыты антифрикционным материалом. Смазка и охлаждение трущихся поверхностей обеспечены самопротоком через них окружающей забортной воды. Технический результат реализации изобретения заключается в обеспечении защиты кормовой оконечности подводной лодки как наиболее уязвимой ее части (патент RU №2166456 С1, 10.05.2001 [15]).
Недостатком данного устройства является то, что при самопротоке окружающей забортной воды через трущиеся поверхности технологически достаточно сложно обеспечить необходимый эффект их смазки и охлаждения. Дело в том, что реализация такой схемы будет требовать фильтрации указанной забортной воды для обеспечения безопасности функционирования системы, поскольку на практике в морской воде достаточно часто встречаются инородные предметы, например, оборванные части буксируемых антенн других подводных лодок, тросов или рыболовецких сетей и иного мусора техногенного происхождения, попадание которых между трущимися поверхностями может привести к их ускоренному износу или, что гораздо более опасно, заклиниванию конструкции. Фильтрация же забортной воды многократно уменьшит ее количество, протекающее через систему, тем более, при условии протекания ее самопротоком, без создания дополнительного давления.
Известна также кормовая оконечность подводной лодки, включающая вертикальные и горизонтальные стабилизаторы с закрепленными на них рулями (Б.Ф. Дронов «Тенденции развития архитектуры подводных лодок», Военно-технический альманах «Тайфун» 2002 г., №2 (42) [16]). Такая схема размещения стабилизаторов стала общераспространенной, однако обладает недостатком - для обеспечения необходимой площади стабилизаторов их габариты, как правило, выходят за габаритные размеры корпуса подводной лодки. Кроме того, при таком размещении стабилизаторов с закрепленными на них рулями каждая из пар рулей обеспечивает управление подводной лодкой только в одной плоскости.
Известна также кормовая оконечность подводной лодки, где две пары стабилизаторов -верхняя и нижняя с закрепленными на них рулями размещены под углом около 45° к основной плоскости подводной лодки. При этом обеспечивается управление подводной лодкой в любой плоскости любой парой стабилизаторов с рулями, а габариты стабилизаторов, как правило, не выходят за габариты корпуса подводной лодки (В.М. Букалов, А.А. Нарусбаев Л., Судостроение, 1968 г. Проектирование подводных лодок с. 89-91, рис 31 [17]). Такое техническое решение нашло применение, например, на подводных лодках ВМС Швеции типа Gotland и ВМС Германии типа 212.
Недостатком данного технического решения является то, что стабилизаторы подводного технического средства (например, подводной лодки или глубоководного аппарата) закрепленные под углом к основной плоскости подводного технического средства при покладке подводного технического средства на грунт и особенно при его всплытии во льдах подвержены в силу своего расположения опасности повреждения при воздействии вертикальной нагрузки.
Известна также кормовая оконечность подводного технического средства, которая содержит правый и левый верхние, правый и левый нижние стабилизаторы, закрепленные под углом к основной плоскости подводного технического средства. При этом верхняя и нижняя пары стабилизаторов соединены в крайней от обшивки точке с образованием Л-образного профиля для верхней пары стабилизаторов и V-образного профиля для нижней пары стабилизаторов по отношению к наружной поверхности корпуса подводного технического средства. Достигается повышение живучести кормовой оконечности подводного технического средства при воздействии на стабилизаторы вертикальной нагрузки (патент RU №2735450 С1, 02.11.2020 [18]).
Недостатком данного решения является то, что, несмотря на повышение живучести кормовой оконечности подводного технического средства, его стабилизаторы, закрепленные под углом к основной плоскости (аналогично рассмотренному ранее варианту) при покладке подводного технического средства на грунт, и особенно при его всплытии во льдах подвержены опасности повреждения в силу своего расположения.
Задачей предлагаемого технического решения является повышение конструктивной надежности планер-глайдера, путем обеспечения защиты кормовой оконечности и гребного винта планера-глайдера.
В качестве прототипа выбрано устройство [2], как наиболее близкое по своей технической сущности к заявляемому объекту.
Поставленная задача решается за счет того, что подводный планер-глайдер, содержащий корпус, систему изменения плавучести, гребной винт, кормовое оперение с горизонтальными и вертикальными рулями, устройства для выпуска буксируемых антенн, в котором, в отличие от прототипа [2], гребной винт размещен внутри кольцеобразной насадки, закрепленной посредством горизонтальных стабилизаторов кормового оперения на дополнительных боковых корпусах, размещенных побортно вдоль корпуса и присоединенных к нему, кормовые горизонтальные рули присоединены к указанным горизонтальным стабилизатором, вертикальные кормовые рули установлены на дополнительных боковых корпусах, а устройства для выпуска буксируемых антенн размещены в кормовых оконечностях указанных боковых корпусов, система управления планер-глайдером, выполнена в виде матричного микропроцессора, работающего по специальной программе, включающей как движение по предварительно заложенной программе, так и движение в режиме «on line» при изменении условий, обстоятельств и миссии проводимых исследований.
В отличие от прототипа [2] в предлагаемом устройстве кормовая оконечность имеет корпус, гребной винт, кормовое оперение с горизонтальными и вертикальными рулями, устройства для выпуска буксируемых антенн. Гребной винт размещен внутри кольцеобразной насадки, закрепленной посредством горизонтальных стабилизаторов кормового оперения на дополнительных боковых корпусах, размещенных побортно вдоль корпуса. Кормовые горизонтальные рули присоединены к указанным горизонтальным стабилизаторам, вертикальные кормовые рули установлены на дополнительных боковых корпусах, в кормовых оконечностях которых размещены устройства для выпуска буксируемых антенн.
Такое выполнение кормовой оконечности позволяет обеспечить защиту кормовой оконечности и гребного винта планера-глайдера.
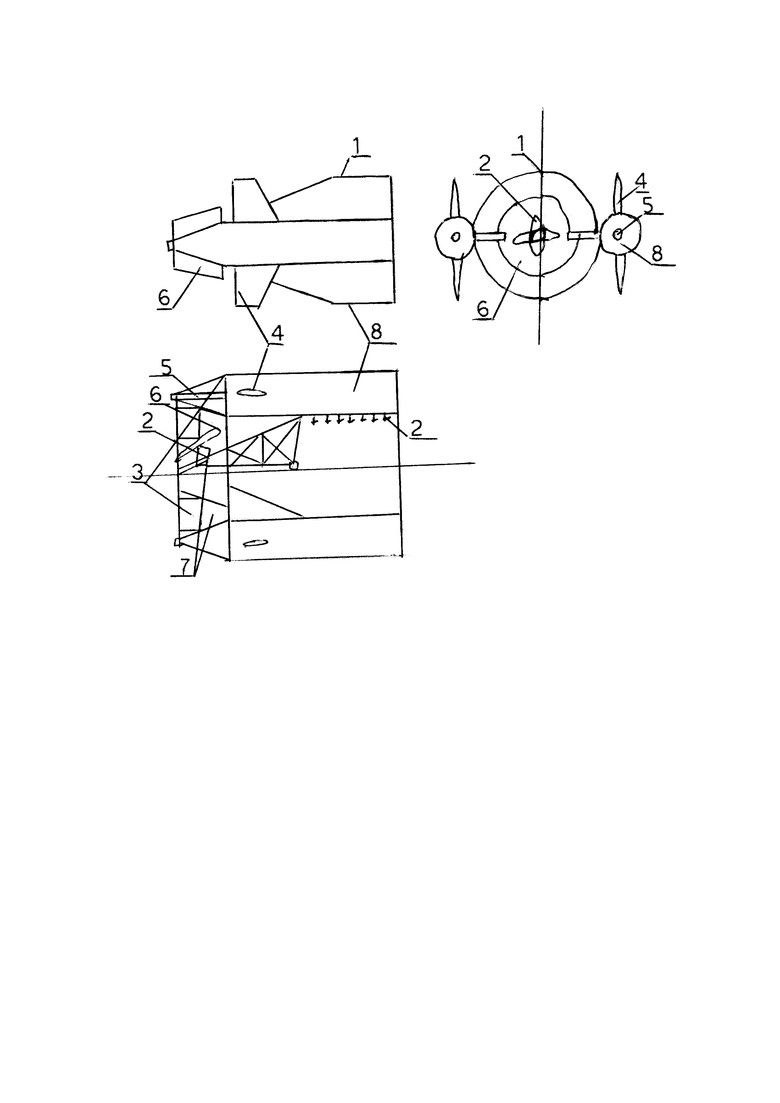
Сущность изобретения поясняется чертежом (фигура).
Кормовая оконечность планера-глайдера, содержит корпус 1, гребной винт 2, кормовое оперение с горизонтальными 3 и вертикальными 4 рулями, устройства для выпуска буксируемых антенн 5, гребной винт 2 размещен внутри кольцеобразной насадки 6, закрепленной посредством горизонтальных стабилизаторов 7 кормового оперения на дополнительных боковых корпусах 8, размещенных побортно вдоль корпуса и присоединенных к нему, кормовые горизонтальные рули 3 присоединены к указанным горизонтальным стабилизатором 7, вертикальные кормовые рули 4 установлены на дополнительных боковых корпусах 8, а устройства для выпуска буксируемых антенн 5 размещены в кормовых оконечностях указанных боковых корпусов 8.
Матричный микропроцессор представляет собой центральный процессор на основе нейроматрицы NM 6403 или NM 6404.
Наличие дополнительных боковых корпусов, размещенных побортно вдоль корпуса и присоединенных к нему позволяет обеспечить защиту кормовой оконечности от воздействия ударных нагрузок, например возникающих при швартовке планера-глайдера к пирсу или обеспечивающему судну, а также при воздействии волны, распространяющейся с траверзных направлений к корпусу. Аналогичным образом осуществляется защита гребного винта планера-глайдера, размещенного внутри кольцеобразной насадки, закрепленной посредством горизонтальных стабилизаторов кормового оперения на дополнительных боковых корпусах.
Снижение ходовой вибрации (повышенных амплитуд колебаний корпуса), возникающей при работе гребного винта, достигается за счет увеличения жесткости конструкция кормовой оконечности планера-глайдера, обусловленного наличием дополнительных боковых корпусов, размещенных побортно вдоль корпуса и присоединенных к нему. Дополнительное снижение ходовой вибрации достигается за счет уменьшения неоднородностей потока, натекающего на лопасти гребного винта, что обеспечивается креплением насадки посредством горизонтальных стабилизаторов на дополнительных боковых корпусах (что позволило отказаться от обычно устанавливаемого перед гребным винтом направляющего аппарата) и переносом горизонтальных и вертикальных рулей кормового оперения на дополнительные боковые корпуса вне потока, непосредственно натекающего на лопасти гребного винта. Повышение однородности водного потока, натекающего на лопасти гребного винта, обеспечивает снижение динамических сил, возникающих на винте и воздействующих на корпус, фактически определяющих интенсивность ходовой вибрации. В результате может заметно снижаться шумоизлучение подводной лодки, обусловленное работой гребного винта и ходовой вибрацией.
Технический результат реализации изобретения заключается в обеспечении защиты кормовой оконечности и гребного винта подводной лодки, как наиболее уязвимых ее частей, от повреждений при ударных нагрузках, в снижении ходовой вибрации, возникающей при работе гребного винта, в обеспечении возможности использования буксируемых антенн при малых глубинах погружения подводной лодки и исключении их повреждения собственным винтом подводной лодки.
Обеспечение защиты кормовой оконечности и гребного винта подводной лодки, как наиболее уязвимых ее частей, от повреждений при ударных нагрузках происходит за счет добавления в состав кормовой оконечности нового элемента, а именно, дополнительных корпусов, размещенных побортно вдоль корпуса подводной лодки.
Снижение ходовой вибрации, возникающей при работе гребного винта происходитза счет повышения жесткости кормовой оконечности, обеспечиваемой благодаря рациональному размещению упомянутых дополнительных корпусов и других элементов кормовой оконечности, в том числе в виду того, что кольцеобразная насадка закреплена посредством горизонтальных стабилизаторов кормового оперения на дополнительных боковых корпусах, и кормовые горизонтальные рули присоединены к указанным горизонтальным стабилизатором, а вертикальные кормовые рули установлены на дополнительных боковых корпусах.
Возможности использования буксируемых антенн при малых глубинах погружения подводной лодки и исключения их повреждения собственным винтом подводной лодки обеспечивается за счет возможности рационального размещения устройства для выпуска буксируемых антенн в составе кормовой оконечности подводной лодки.
Подводный планер-глайдер работает следующим образом. Система изменения плавучести, например, в виде цистерны в корпусе обеспечивает положительную или отрицательную плавучесть планера-глайдера. При отрицательной плавучести горизонтальные рули, установленные под углом к основной плоскости планера-глайдера, обеспечивают движение аппарата вниз-вперед. По достижении заданной глубины погружения по сигналу датчика глубины отрицательная плавучесть планера-глайдера меняется на положительную, например, путем продувания цистерны.
При проведении подводных исследований, когда необходимо более досконально обследовать интересующий подводный объект или выполнить длительные измерения геофизических параметров по команде с диспетчерской станции или центра управления планер-глайдера, посредством управляющих сигналов, передаваемых по гидроакустическому каналу связи через систему управления планер-глайдером, выполненной в виде матричного микропроцессора по специальной программе, выполняют как движение по предварительно заложенной программе, так и движение в режиме «оп Нпе» при изменении условий, обстоятельств и миссии проводимых исследований.
Источники информации.
1. Лопота А.В., Николаев А.Б. «Морские робототехнические комплексы военного и специального назначения», СПб., Издательство ЦНИИ РТК, 2016 г., стр. 16-17
2. Патент на полезную модель RU №124245 U1, 2012 г.
3. Патент на полезную модель RU №2490164 U1, 2012 г.
4. Патент на полезную модель RU №183537 U1, 2018 г.
5. Патент RU №2669244, 2017.
6. Патент на полезную модель RU №164034 U1, 20.08.2016.
7. Заявка US №2009241826 А1, 01.10.2009.
8. Патент JP Н1059282 А, 03.03.1998.
9. Патент RU №2669244 С1, 09.10.2018.
10. Заявка KR 20160015935 А, 15.02.2016.
11. Патент RU №2490164 С1, 20.08.2013.
12. Патент RU№207065 U1, 11.10.2021.
13. Быховский И.А. Атомные суда. Ленинград, 1961 г., стр. 121-128, 144.
14. Справочник "Военные корабли СССР и России", г. Якутск, изд. 1995 г., стр. 44.
15. Патент RU №2166456 С1, 10.05.2001.
16. Б.Ф. Дронов «Тенденции развития архитектуры подводных лодок», Военно-технический альманах «Тайфун» 2002 г., №2 (42).
17. В.М. Букалов, А.А. Нарусбаев Л., Судостроение, 1968 г. Проектирование подводных лодок с. 89-91.
18. Патент RU №2735450 С1, 02.11.2020.
Изобретение относится к судостроению, а именно к автономным необитаемым подводным самоходным аппаратам, и может быть использовано для исследования водных акваторий. Подводный планер-глайдер содержит корпус, систему изменения плавучестью, гребной винт, кормовое оперение с горизонтальными и вертикальными рулями и устройства для выпуска буксируемых антенн. Гребной винт размещен внутри кольцеобразной насадки, закрепленной посредством горизонтальных стабилизаторов кормового оперения на дополнительных боковых корпусах, размещенных побортно вдоль корпуса и присоединенных к нему. Кормовые горизонтальные рули присоединены к указанным горизонтальным стабилизаторам, а вертикальные кормовые рули установлены на дополнительных боковых корпусах. Устройства для выпуска буксируемых антенн размещены в кормовых оконечностях указанных боковых корпусов. Система управления планер-глайдером выполнена в виде матричного микропроцессора, работающего по программе, включающей как движение по предварительно заложенной программе, так и движение в режиме «on-line». Достигается повышение надежности конструкции планер-глайдера, а также расширение функциональных возможностей использования планер-глайдера. 1 ил.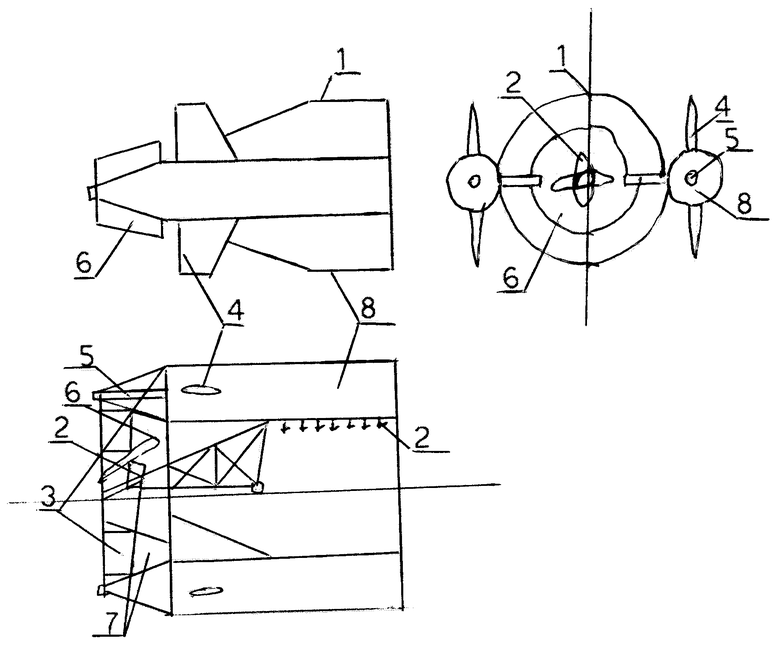
Подводный планер-глайдер, содержащий корпус, систему изменения плавучестью, гребной винт, кормовое оперение с горизонтальными и вертикальными рулями, устройства для выпуска буксируемых антенн, отличающийся тем, что гребной винт размещен внутри кольцеобразной насадки, закрепленной посредством горизонтальных стабилизаторов кормового оперения на дополнительных боковых корпусах, размещенных побортно вдоль корпуса и присоединенных к нему, кормовые горизонтальные рули присоединены к указанным горизонтальным стабилизаторам, вертикальные кормовые рули установлены на дополнительных боковых корпусах, а устройства для выпуска буксируемых антенн размещены в кормовых оконечностях указанных боковых корпусов, система управления планер-глайдером выполнена в виде матричного микропроцессора, работающего по программе, включающей как движение по предварительно заложенной программе, так и движение в режиме «on-line».
| Реверсивное реактивное сопло | 1959 |
|
SU124245A3 |
| Подводный планер-глайдер | 2021 |
|
RU2763456C1 |
| JP 2007276609 A, 25.10.2007 | |||
| 0 |
|
SU207065A1 | |
| АТОМНАЯ ПОДВОДНАЯ ЛОДКА | 2012 |
|
RU2506198C1 |
| ОТОБРАЖЕНИЕ КОНТАКТНОЙ ИНФОРМАЦИИ ВХОДЯЩЕГО ВЫЗОВА | 2010 |
|
RU2534970C2 |

