Изобретение относится к области электротехники и силовой электроники, может быть использовано при построении систем генерирования электрической энергии трехфазного переменного тока или систем гарантированного электропитания переменного тока, в которых для снижения массы и габаритов системы генерирования, увеличения рабочего ресурса применяется инвертор напряжения. Первичными источниками с нестабильными параметрами входной энергии в таких системах может служить сеть промышленной частоты, синхронный генератор с переменной скоростью вращения вала или аккумуляторная батарея. Функция обеспечения качественных показателей генерируемой электрической энергии возлагается на инвертор напряжения и выходной силовой низкочастотный фильтр.
Известен способ управления трехфазным инвертором напряжения [S. Hiti, D. Boroyevich and С.Cuadros, "Small-signal modeling and control of three-phase PWM converters", Conference Record of the IEEE Industry Applications Society Annual Meeting, 1994, vol.2, pp.1143-1150, 2-6 Oct. 1994], основанный на замкнутой двухконтурной системе управления с подчиненным регулированием во вращающейся ортогональной системе координат. Внешний контур в такой системе следит за напряжением, внутренний - за током. Таким образом, сигнал задания на ток формирует регулятор внешнего контура, следящий за напряжением.
Однако в указанном способе величина формируемого тока определяется только нагрузкой. В реальной системе необходимо ограничивать величину тока при перегрузке для того, чтобы ключи инвертора не вышли из строя.
Кроме того, известен динамический способ управления ограничением тока трехфазного инвертора напряжения [Xunwei Yu and Zhenhua Jiang, "Dynamic Current Limiting Control of Voltage Source Inverters", IEEE International Electric Machines and Drives Conference, 2009. IEMDC '09, pp.1664-1668, 3-6 May 2009], являющийся прототипом предлагаемого изобретения, заключающийся в том, что формируют два сигнала задания на две ортогональные проекции напряжения на нагрузке, формируют сигнал уставки на ток перегрузки, формируют опорный двухполярный сигнал, вырабатывают согласно сигналам задания и сигналам обратных связей сигналы управления в двух ортогональных проекциях, преобразуют сигналы управления ортогональных проекций в три моделирующие сигнала во временной области, вырабатывают импульсы управления вентилями инвертора напряжения при превышении моделирующих напряжений над опорным напряжением.
В данном способе в момент времени, когда детектируется перегрузка, вводится ограничение на сигнал задания на ток. В качестве ограничения сигнала задания на ток проекции «d» берется значение, которое формировал регулятор контура напряжения проекции «d» до перегрузки. В качестве ограничения сигнала задания на ток проекции «q» берется значение, которое высчитывается по следующей формуле:

где Irms.Limit - это величина уставки действующего значения тока в режиме перегрузки; Id.Limit - ограничение на задание тока проекции «d».
В данном способе непрерывно измеряется действующее значение тока, когда оно меньше уставки режима перегрузки Irms.Limit, система управления работает, как первый аналог. При переходе в режим перегрузки вводятся ограничения на сигналы задания тока, и в результате обеспечивается ограничение тока на уровне значения уставки Irms.Limit, при этом напряжение нагрузки уменьшается.
Недостатком данного способа управления является то, что в момент перегрузки скачком изменяется сигнал задания на ток проекции «q», а, если еще меняется cosφ нагрузки, то система управления будет колебаться между нормальным режимом и режимом токоограничения. Переключение между режимами может вывести регуляторы из устойчивого состояния и вызвать генерацию колебаний на выходе системы управления, что приведет к отсутствию стабилизации выходных параметров инвертора.
Задача изобретения - обеспечение плавного перехода из нормального режима в режим токоограничения и наоборот.
Поставленная задача достигается тем, что в известном способе управления инвертором напряжения, заключающемся в том, что двухконтурная система подчиненного регулирования формирует управляющие сигналы во вращающейся ортогональной системе координат для ШИМ-модулятора; при этом сигнал задания напряжения проекции «q» всегда равен нулю, а сигнал задания напряжения проекции «d» равен требуемой амплитуде выходного напряжения, когда ток нагрузки меньше уставки амплитуды тока перегрузки, и корректируется при перегрузке так, чтобы формировать на выходе ток, заданный у ставкой.
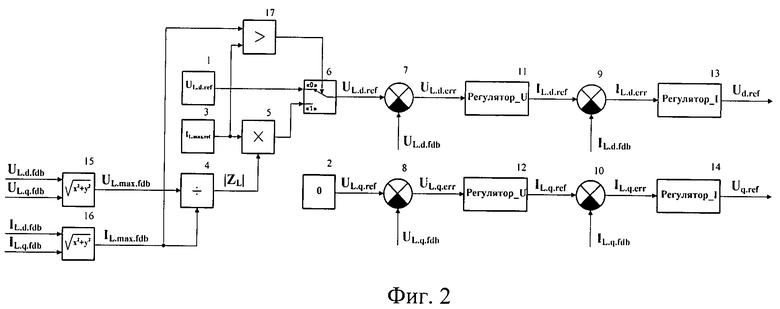
На фиг.1 представлена структурная схема, реализующая предлагаемый способ управления инвертором напряжения. Она условно может быть разделена на силовую схему (блок 18) и систему управления (блок 19). Силовая схема содержит инвертор напряжения (блок 20), три выхода стоек которого соединены с входами низкочастотного фильтра (блок 21), а выходы последних через датчики тока (блоки 23, 24, 25) соединены с входами нагрузки (блок 22). Выходы низкочастотного фильтра и информационные сигналы датчиков тока (блоки 23, 24, 25) соединены с входами системы управления (блок 19). Система управления включает в себя блок системы регулирования (блок 26), входы и выходы которого соединены с блоками преобразователей координат (блоки 27, 28, 29), три выхода блока преобразователя координат (блок 27) соединены с входами схем сравнения (блоки 31, 32, 33), к другим входам которых подключен выход генератора опорного двухполярного пилообразного напряжения (блок 30). Выходы схем сравнения соединены с входами первой группы драйверов непосредственно (блоки 38, 40, 42) и через логические элементы «не» (блоки 34, 35, 36) с входами второй группы драйверов (блоки 37, 39, 41). Выходы первой группы драйверов (блоки 38, 40, 42) соединены с затворами верхних транзисторов стоек инвертора напряжения (блок 20), а выходы второй группы драйверов (блоки 37, 39, 41) соединены с затворами нижних транзисторов стоек инвертора напряжения (блок 20). На фиг.2 представлена структурная схема системы регулирования. Она может быть разделена на две части. Одна часть формирует управляющий сигнал проекции «q» для ШИМ-модулятора (блоки 2, 8, 10, 12, 14), другая часть формирует управляющий сигнал проекции «d» (остальные блоки). Схема состоит из регулятора контура тока (блоки 13, 14), регулятора контура напряжения (блоки 11, 12), схем вычитания (блоки 7-10), формирующих сигналы ошибок между сигналами задания и сигналами обратных связей; источника напряжения (блок 2), формирующего сигнал задания напряжения проекции «q»; источника напряжения (блок 1), формирующего сигнал задания напряжения проекции «d» в случае отсутствия перегрузки; источника напряжения (блок 3), формирующего сигнал уставки тока перегрузки; блока 4, выполняющего функцию алгебраического деления; блока 5, выполняющего функцию алгебраического умножения; блока 6, выполняющего функцию переключения сигнала задания напряжения проекции «d»; блоков 15 и 16, вычисляющих корень из суммы квадратов двух величин; устройства сравнения (блок 17), вырабатывающего сигнал логической «1», когда величина амплитуды обобщенного вектора тока нагрузки превышает уставку амплитуды тока перегрузки, и вырабатывающего сигнал логического «0» в противном случае.
Блоки схемы выполняют следующие функции. Блок 26 выполняет функцию регулирования выходных параметров инвертора напряжения, блок 16 производит измерение амплитуды обобщенного вектора тока нагрузки IL.max.fdb по следующей формуле:

где IL.d.fdb - проекция «d» обобщенного вектора тока нагрузки; IL.q.fdb b - проекция «q» обобщенного вектора тока нагрузки.
Проекция «d» IL.d.fdb и проекция «q» IL.d.fdb обобщенного вектора тока нагрузки с помощью блока преобразования координат abc/dq (блок 29) получаются из фазных токов по следующим формулам:


где ILA, ILB, ILC - это фазные значения токов нагрузки; ω - циклическая частота выходного напряжения; t - время.
Аналогично блок 15 производит измерение амплитуды обобщенного вектора напряжения нагрузки UL.max.fdb по следующей формуле:

где UL.d.fdb - проекция «d» обобщенного вектора напряжения нагрузки; UL.q.fdb - проекция «q» обобщенного вектора напряжения нагрузки.
Проекция «d» UL.d.fdb и проекция «q» UL.q.fdb обобщенного вектора напряжения нагрузки с помощью блока преобразования координат abc/dq (блок 28) получаются из фазных напряжений по следующим формулам:


где ULA, ULB, ULC - это фазные значения напряжений нагрузки; ω - циклическая частота выходного напряжения; t - время.
Логические элементы «не» (блоки 34, 35, 36) представляют собой обычные импульсные (цифровые) инверторы уровня сигнала. Блоки 37, 38, 39, 40, 41, 42 - драйверы, усиливают сигнал по мощности, осуществляют гальваническую развязку между электрическими цепями системы управления и силовой схемой инвертора напряжения (блок 20). Инвертор напряжения может быть выполнен на любых управляемых вентилях, в качестве примера изобретения изображен инвертор напряжения на IGBT транзисторах VT1, VT2, VT3, VT4, VT5 и VT6. Блоки 23, 24 и 25 представляют собой датчики тока, сигналы с их выхода, пропорциональны токам нагрузки инвертора, и подаются на вход блока 29, который вырабатывает напряжение пропорциональное амплитуде обобщенного вектора трех токов инвертора. Схема нагрузки может быть выполнена как с нулевым проводом, так и без него.
Предлагаемый способ осуществляется следующим образом: с помощью блока 16 производится измерение амплитуды обобщенного вектора тока нагрузки IL.max.fdb, если эта величина меньше уставки, задаваемой блоком 3, то блок 17 выдаст сигнал логического «0» и переключатель 6 будет находиться в состоянии «0». В этом случае сигнал задания на контур напряжения проекции «d» будет задаваться блоком 1, и вся система будет работать, как первый аналог.
Если величина амплитуды обобщенного вектора тока нагрузки IL.max.fdb больше уставки, задаваемой блоком 3, то блок 17 выдаст сигнал логической «1» и переключатель 6 будет находиться в состоянии «1». С помощью блоков 4, 15 и 16 вычисляется модуль сопротивления нагрузки согласно закону Ома:
Далее с помощью блоков 3 и 5 формируется такой сигнал задания на контур напряжения проекции «d», чтобы сформировать ток нагрузки, заданный уставкой (блоком 3). Сигнал задания на контур напряжения проекции «d» определяется по закону Ома:

Таким образом, в режиме перегрузки обеспечивается стабилизация тока нагрузки на уровне, определяемом уставкой (блоком 3).
На выходе блоков 7 и 8 формируются сигналы, равные разнице между сигналом задания и сигналом обратной связи напряжения нагрузки. Эти сигналы поступают на регуляторы напряжения (блоки 11 и 12), которые формируют такой сигнал задания на ток соответствующей проекции, чтобы разностный сигнал на выходе блоков 7 и 8 был равен нулю, т.е. чтобы напряжение нагрузки равнялось сигналу задания на напряжение.
Далее на выходе блоков 9 и 10 формируются сигналы, равные разнице между сигналом задания и сигналом обратной связи тока нагрузки. Эти сигналы поступают на регуляторы тока (блоки 13 и 14), которые формируют такой сигнал управления соответствующей проекции, чтобы разностный сигнал на выходе блоков 9 и 10 был равен нулю, т.е. чтобы ток нагрузки равнялся сигналу задания на ток. Сигналы управления поступают на вход блока преобразования координат dq/abc (блок 27), формирующего три моделирующих сигнала согласно следующим формулам:



Три моделирующих сигнала и опорный сигнал (с выхода блока 30) поступают на компараторы (блоки 31, 32 и 33), вырабатывающие импульсы при превышении моделирующих напряжений над опорным напряжением. Эти импульсы поступают на логические элементы «не» (блоки 34, 35, 36) и драйверы (блоки 38, 40, 42) верхних транзисторов (VT1, VT3, VT5) инвертора напряжения (блок 20). Напряжения с выходов логических элементов «не» подаются на драйверы (блоки 37, 39, 41) нижних транзисторов (VT2, VT4, VT6) инвертора напряжения (блок 20). Выходные напряжения инвертора снимаются со средних точек стоек А, В, С и подаются на вход силового низкочастотного фильтра (блок 21). Низкочастотный фильтр подавляет высокочастотные гармоники, практически синусоидальное трехфазное напряжение с частотой подается на нагрузку (блок 22).
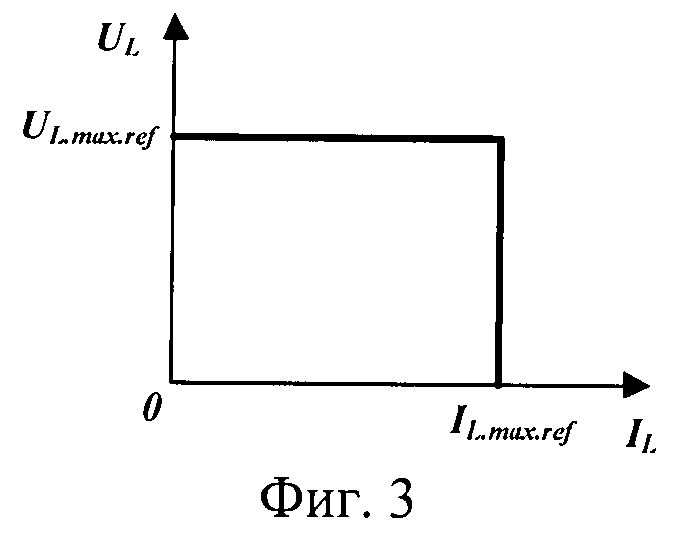
Таким образом, с помощью данного способа управления реализуется внешняя характеристика, показанная на фиг.3. При этом обеспечивается плавный переход из нормального режима в режим токоограничения и наоборот, т.к. регуляторы все время работают в линейном режиме (не ограничиваются), и меняется только сигнал задания на напряжение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии при резкопеременной нагрузке | 2018 |
|
RU2697262C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Способ управления инвертором напряжения в системах накопления электрической энергии при резкопеременной нагрузке | 2020 |
|
RU2733999C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2522675C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ НАПРЯЖЕНИЯ В СОСТАВЕ СИСТЕМЫ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА В РЕЖИМАХ ПЕРЕГРУЗКИ | 2011 |
|
RU2509336C2 |
| Способ пространственно-векторной широтно-импульсной модуляции выходного напряжения многоуровневого трехфазного автономного инвертора напряжения | 2023 |
|
RU2818965C1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| СПОСОБ ПОДАВЛЕНИЯ ДУГОВЫХ ЗАМЫКАНИЙ НА ЗЕМЛЕ В ОБМОТКАХ НАГРУЗКИ И ПИТАЮЩИХ ТРАНСФОРМАТОРОВ ТРЕХФАЗНОЙ СЕТИ С НЕЗАЗЕМЛЕННОЙ НЕЙТРАЛЬЮ (ВАРИАНТЫ) | 1994 |
|
RU2072604C1 |
| Устройство для определения составляющих обобщенного вектора напряжения статора @ -фазного асинхронного двигателя | 1986 |
|
SU1366954A1 |
Изобретение относится к области электротехники и силовой электроники. Техническим результатом является обеспечение плавного перехода из нормального режима в режим токоограничения и наоборот. Способ управления трехфазным инвертором напряжения со стабилизацией тока при переходе в режимах перегрузки заключается в том, что формируют два сигнала задания на две ортогональные проекции напряжения на нагрузке, формируют сигнал уставки на ток перегрузки, формируют опорный двухполярный сигнал, вырабатывают согласно сигналам задания и сигналам обратных связей сигналы управления в двух ортогональных проекциях, преобразуют сигналы управления ортогональных проекций в три моделирующих сигнала во временной области, вырабатывают импульсы управления вентилями инвертора напряжения при превышении моделирующих напряжений над опорным напряжением, измеряют мгновенные значения фазных токов инвертора напряжения, вычисляют амплитудное значение обобщенного вектора фазных токов инвертора напряжения и при достижении им заданной величины корректируют сигнал задания на напряжение так, чтобы формировать в нагрузке ток, равный сигналу уставки на ток перегрузки. Таким образом, в режиме перегрузки обеспечивается стабилизация тока нагрузки на уровне, определяемом уставкой. При этом обеспечивается плавный переход из нормального режима в режим токоограничения и наоборот, т.к. регуляторы все время работают в линейном режиме (не ограничиваются), и меняется только сигнал задания на напряжение. 3 ил.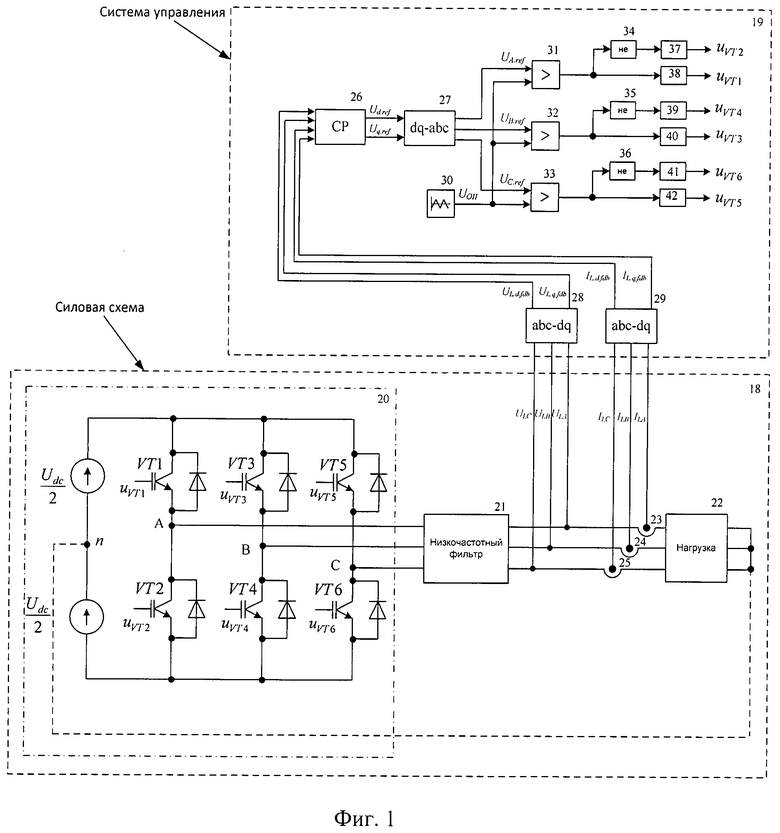
Способ управления трехфазным инвертором напряжения со стабилизацией тока при переходе в режимах перегрузки, заключающийся в том, что формируют два сигнала задания на две ортогональные проекции напряжения на нагрузке, формируют сигнал уставки на ток перегрузки, формируют опорный двухполярный сигнал, вырабатывают согласно сигналам задания и сигналам обратных связей сигналы управления в двух ортогональных проекциях, преобразуют сигналы управления ортогональных проекций в три моделирующие сигнала во временной области, вырабатывают импульсы управления вентилями инвертора напряжения при превышении моделирующих напряжений над опорным напряжением, отличающийся тем, что измеряют мгновенные значения фазных токов инвертора напряжения, вычисляют амплитудное значение обобщенного вектора фазных токов инвертора напряжения и при достижении им заданной величины корректируют сигнал задания на напряжение так, чтобы формировать в нагрузке ток, равный сигналу уставки на ток перегрузки.
| Hiti S., "Small-signal modeling and control of three-phase PMW converters", Conference Record of the IEEE Industry Applications Spciety Annual Meeting, 1994 | |||
| СПОСОБ СБОРКИ РАДИАЛЬНЫХ ПОКРЫШЕК | 1997 |
|
RU2114002C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТЫ ИНВЕРТОРОВ | 2009 |
|
RU2412459C1 |
| СТАБИЛИЗАТОР ТРЕХФАЗНОГО НАПРЯЖЕНИЯ С ОДНОФАЗНЫМ ЗВЕНОМ ВЫСОКОЙ ЧАСТОТЫ | 1996 |
|
RU2138112C1 |

