Изобретение относится к области огневого поражения объектов и может быть использовано в высокоточных комплексах, использующих на различных этапах наведения радионавигационные системы.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ поражения цели артиллерийскими самонаводящимися боеприпасами (АСНБ) [см., например, Пат. 2738330 RU, МПК F41G 3/00. Способ поражения цели артиллерийскими самонаводящимися боеприпасами / П.Е. Кулешов, А.В. Ганин, В.Н. Неровный и др.; заявитель и патентообладатель ВУНЦ ВВС «ВВА» (г. Воронеж). - №2020106349; заявл. 10.02.2020 г.; опубл. 11.12.2020 г.], основанный на определении координат цели и внесении их значений в АСНБ, определении К≥k числа значений координат установки приемопередающих блоков в районе размещения цели, где k - минимальное количество источников навигационных сигналов, необходимых для определения местоположения АСНБ на этапе наведения, доставке запуском К≥k неуправляемых носителей К≥k приемопередающих блоков в свои координаты, определении на каждом приемопередающем блоке по глобальной спутниковой радионавигационной системе (ГСНС) координат своего местоположения, формировании по значениям координат своего местоположения в каждом приемопередающем блоке своих помехоустойчивых навигационных сигналов и передаче их, произведении запуска АСНБ, приеме помехоустойчивых навигационных сигналов приемопередающих блоков АСНБ, определении по значениям их параметров текущих координат своего местоположения и, относительно их значений, корректировке полета АСНБ на цель.
Недостатком способа являются:
необходимость априорной информации о координатах местоположения цели, что требует включения в цикл поражения цели до формирования наземной локальной радионавигационной системы (НЛРНС) средства предварительной разведки;
привязка радионавигационных сигналов к координатам местоположения радионавигационных средств (РНС), полученных с использованием ГСНС, что, в случаях срыва получения ими сигналов от ГСНС, может привести к сбою функционирования НЛРНС в целом.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности поражения цели управляемыми боеприпасами (УБП) с использованием НЛРНС.
Технический результат достигается тем, что в известном способе поражения объектов УБП в локальной радионавигационной системе, основанном на формировании НЛРНС путем установки в заданные координаты К≥k забрасываемых РНС в заданном районе, где k - минимальное количество забрасываемых РНС, необходимых для формирования НЛРНС в заданном районе, отличающийся тем, что установку забрасываемых РНС осуществляют назначенным авиационным комплексом (АК) путем их запуска во время полета, и после ее формирования запускают в заданный район назначенным АК БПЛА наблюдения подстилающей поверхности, на БПЛА по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе, определяют координаты своего текущего местоположения, осуществляют БПЛА наблюдение подстилающей поверхности путем полета в заданном районе, при обнаружении БПЛА М≥1 целей в заданной районе определяют относительно значений его текущих координат местоположения координаты, местоположения целей, а также определяют необходимое число АК поражения  для поражения М целей, где N - число УБП АК поражения,
для поражения М целей, где N - число УБП АК поражения,  - целая часть отношения
- целая часть отношения  распределяют на БПЛА М координат местоположения целей по R числу АК поражения, значения которых передают на соответствующие авиационные АК, распределяют на каждом r-ом АК поражения mr полученных значений координат местоположения целей по УБП,
распределяют на БПЛА М координат местоположения целей по R числу АК поражения, значения которых передают на соответствующие авиационные АК, распределяют на каждом r-ом АК поражения mr полученных значений координат местоположения целей по УБП,  осуществляют запуск r-ым АК поражения nr-го УБП,
осуществляют запуск r-ым АК поражения nr-го УБП,  каждым nr-ым УБП в полете по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе, определяют координаты своего текущего местоположения и, относительно их значений и заданных значений координат местоположения распределенной ему цели, корректируют свой полет в цель.
каждым nr-ым УБП в полете по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе, определяют координаты своего текущего местоположения и, относительно их значений и заданных значений координат местоположения распределенной ему цели, корректируют свой полет в цель.
Сущность изобретения заключается в координатном обеспечении ведения разведки и наведения УБП АК за счет формирования НЛРНС с помощью забрасываемых авиационными комплексами РНС.
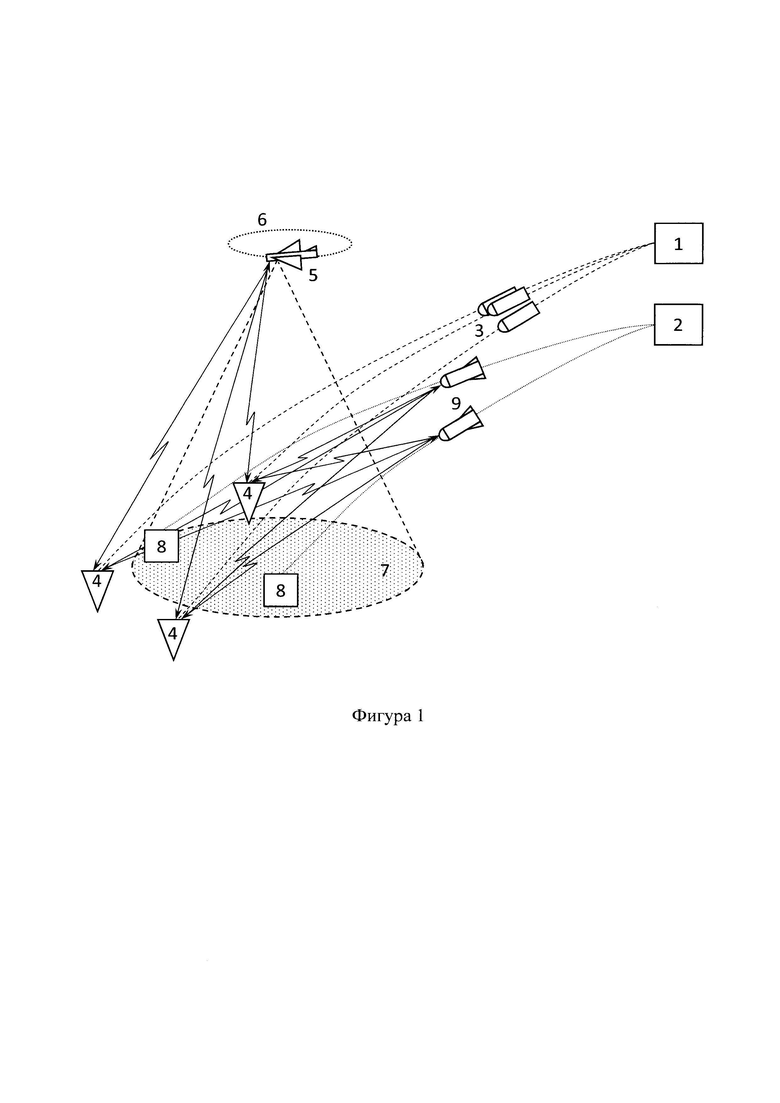
В целом, задача поражения целей УБП в предлагаемом способе осуществляется следующим образом (см. фигуру 1, где: 1 - АК, оснащенный средствами для формирования НЛРНС, 2 - АК поражения, 3 - носители забрасываемых РНС, 4 - РНС, 5 - БПЛА наблюдения подстилающей поверхности, 6 - зона местоположения-барражирования БПЛА, 7 - участок наблюдения подстилающей поверхности БПЛА в заданном районе, 8 - цель; 9 - авиационный УБП. Предварительно на АК, оснащенным средствами для формирования НЛРНС, 1 определяют К≥k количество значений координат точек установки РНС 4 в заданном районе, где k - минимальное количество РНС 4, необходимых для определения местоположения БПЛА 5 и УБП 9. При этом местоположение РНС 4 определяется размерами зоны покрытия пространства локальным радионавигационным полем. Осуществляют АК 1 запуск К носителей 3 и доставку К РНС 4 в свои координаты. После фиксации в грунте РНС 4 формируют радионавигационные сигналы и передают их. АК 1 запускает в заданный район БПЛА 5 наблюдения подстилающей поверхности, который барражирует по траектории 6 и осуществляет наблюдение участок подстилающей поверхности 7 в заданном районе. Дополнительно БПЛА 5 принимает и измеряет параметры радионавигационных сигналов от НЛРНС, по значениям которых и значениям заданных координат установки забрасываемых РНС 4 в заданном районе определяет координаты своего текущего местоположения.
При обнаружении БПЛА 5 целей 8 определяет, относительно значений своих текущих координат, местоположения координаты, местоположения целей 8. А также определяет необходимое число R АК поражения 2 для поражения обнаруженных целей 8
где N - число УБП 9 АК поражения 2; М - число целей 8;  - целая часть отношения
- целая часть отношения 
Далее БПЛА 5 распределяет М координат местоположения целей 8 по R числу АК поражения 2, значения которых передает на соответствующие АК поражения 2. Каждый АК поражения 2 соответственно распределяет mr полученных значений координат местоположения целей 8 по УБП 9 
 После запуска АК поражения 2 УБП 9 каждый nr-ый УБП 9 поражения в полете по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе определяет координаты своего текущего местоположения и, относительно их значений и заданных значений координат местоположения распределенной ему цели, корректирует свой полет в цель 8
После запуска АК поражения 2 УБП 9 каждый nr-ый УБП 9 поражения в полете по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе определяет координаты своего текущего местоположения и, относительно их значений и заданных значений координат местоположения распределенной ему цели, корректирует свой полет в цель 8 
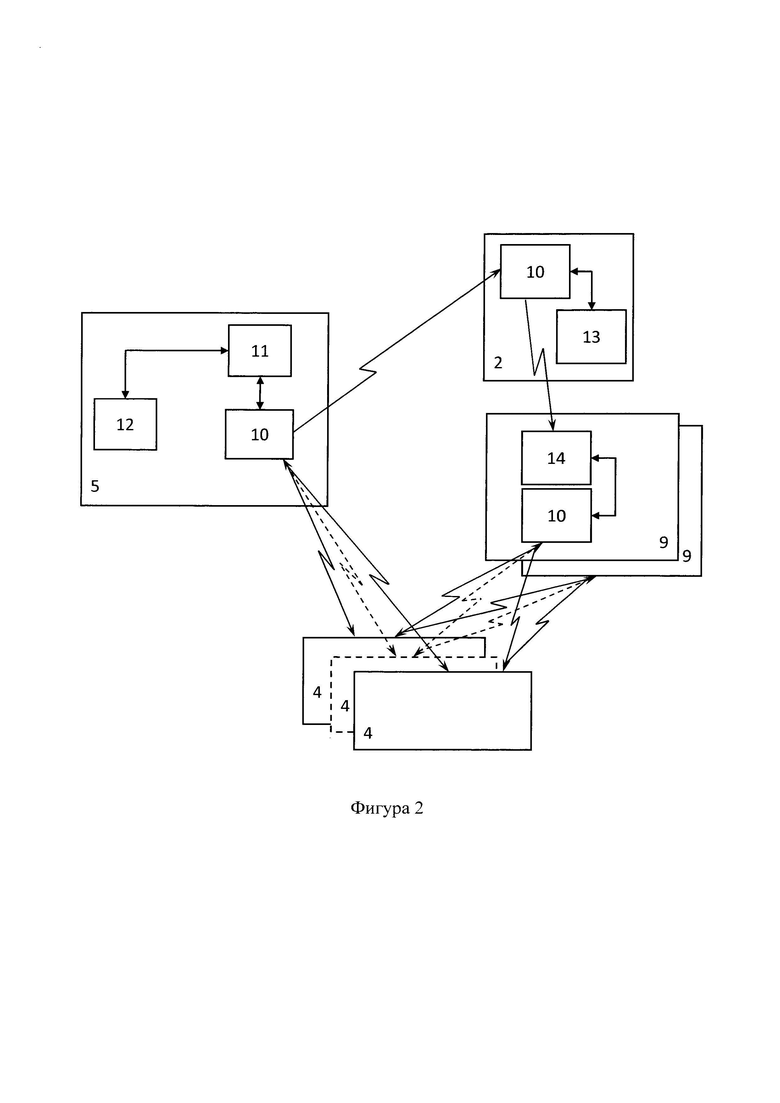
На фигуре 2 изображена блок-схема варианта устройства, реализующего способ. Блок-схема включает: приемопередающий блок 10, блок обработки и управления 11, бортовое средство наблюдения 12, блок управления бортовым авиационным вооружением 13, автопилот 14, остальные обозначения соответствуют фигуре 1.
Устройство работает следующим образом. АК 1 осуществляет формирование НЛРНС и запускает БПЛА 5. Приемопередающий блок 10 БПЛА 5 принимает радионавигационные сигналы от РНС 4, параметры которых передает в блок обработки и управления 11 БПЛА 5. Блок обработки и управления 11 осуществляет управление бортовым средством наблюдения 12 и определение требуемой координатной информации, а также передает сформированные информационные сигналы через приемопередающий блок 10 на АК 2. Приемопередающий блок 10 АК 2 принимает информационные сигналы БПЛА 5, параметры значений которых передает в блок управления бортовым авиационным вооружением 13 АК 2. Блок управления бортовым авиационным вооружением 13 АК 2 осуществляет перераспределение координатных параметров целей 8 и через приемопередающий блок 10 передает сформированные информационные сигналы на автопилот 14 УБП 9. Приемопередающие блоки 10 УБП 9 принимают радионавигационные сигналы от РНС 4, параметры которых передают в свои автопилоты 14. Автопилоты 14 обрабатывают полученные и хранящиеся данные и по ее результатам обработки корректируют траекторию полетов УБП 9.
Таким образом, предлагаемый способ позволяет повысить эффективность поражения цели УБП с использованием НЛРНС, за счет формирования НЛРНС с помощью забрасываемых АК РНС и БПЛА в интересах координатного обеспечения ведения разведки и наведения УБП. Следовательно, предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ поражения объектов УБП в локальной радионавигационной системе, основанный на формировании НЛРНС путем установки в заданные координаты К≥k забрасываемых РНС в заданном районе, где k - минимальное количество забрасываемых РНС, необходимых для формирования НЛРНС в заданном районе, осуществлении установки забрасываемых РНС назначенным АК путем их запуска во время полета и после ее формирования запуска в заданный район назначенным АК БПЛА наблюдения подстилающей поверхности, определении на БПЛА по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе координат своего текущего местоположения, осуществлении БПЛА наблюдения подстилающей поверхности путем полета в заданном районе, определении при обнаружении БПЛА М≥1 целей в заданной районе относительно значений его текущих координат местоположения координат местоположения целей, а также определении необходимого числа АК поражения  для поражения М целей, где N - число УБП АК поражения,
для поражения М целей, где N - число УБП АК поражения,  - целая часть отношения
- целая часть отношения  , распределении на БПЛА М координат местоположения целей по R числу АК поражения, передаче их значений на соответствующие авиационные АК, распределении на каждом r-ом АК поражения mr полученных значений координат местоположения целей по УБП,
, распределении на БПЛА М координат местоположения целей по R числу АК поражения, передаче их значений на соответствующие авиационные АК, распределении на каждом r-ом АК поражения mr полученных значений координат местоположения целей по УБП,  осуществлении запуска r-ым АК поражения nr-го УБП,
осуществлении запуска r-ым АК поражения nr-го УБП,  определении каждым nr-ым УБП в полете по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе координат своего текущего местоположения и корректировке относительно их значений и заданных значений координат местоположения распределенной ему цели своего полета в цель.
определении каждым nr-ым УБП в полете по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе координат своего текущего местоположения и корректировке относительно их значений и заданных значений координат местоположения распределенной ему цели своего полета в цель.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые радиоэлектронные узлы и устройства, а также средства доставки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ АРТИЛЛЕРИЙСКИХ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ | 2024 |
|
RU2833021C1 |
| СПОСОБ АДАПТИВНОГО ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ | 2013 |
|
RU2540001C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ АРТИЛЛЕРИЙСКИМИ САМОНАВОДЯЩИМИСЯ БОЕПРИПАСАМИ | 2020 |
|
RU2738330C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ УПРАВЛЯЕМЫМ БОЕПРИПАСОМ В СЛОЖНОЙ ФОНОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2019 |
|
RU2719891C1 |
| СПОСОБ ВЫСОКОТОЧНОГО ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2014 |
|
RU2598687C2 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМЫМ БОЕПРИПАСАМ | 2015 |
|
RU2593522C1 |
| СПОСОБ ПОСТАНОВКИ ПРОТЯЖЕННОГО АЭРОЗОЛЬНОГО ОБРАЗОВАНИЯ ДЛЯ ПРИКРЫТИЯ ВЕРТОЛЕТА | 2022 |
|
RU2800224C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2693936C1 |
| СПОСОБ ДОСТАВКИ ИСТОЧНИКА РАДИОПОМЕХ | 2015 |
|
RU2591047C1 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
Изобретение относится к области огневого поражения объектов и может быть использовано в высокоточных комплексах, использующих на различных этапах наведения радионавигационные системы. Сущность способа поражения объектов управляемыми боеприпасами (УБП) с использованием локальной радионавигационной системы заключается в следующем. Формируют наземную локальную радионавигационную систему (НЛРНС) путем установки в заданные координаты назначенным авиационным комплексом (АК) К≥k забрасываемых радионавигационных средств (РНС) в заданном районе, где k - минимальное количество забрасываемых РНС, необходимых для формирования НЛРНС в заданном районе. Запускают в заданный район назначенным АК беспилотный летательный аппарат (БПЛА) наблюдения подстилающей поверхности. На БПЛА по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе определяют координаты своего текущего местоположения. Осуществляют БПЛА наблюдение подстилающей поверхности путем полета в заданном районе. При обнаружении БПЛА М≥1 целей в заданной районе определяют относительно значений его текущих координат местоположения координаты местоположения целей, а также определяют необходимое число АК поражения  для поражения М целей, где N - число УБП АК поражения,
для поражения М целей, где N - число УБП АК поражения,  - целая часть отношения
- целая часть отношения  Распределяют на БПЛА М координат местоположения целей по R числу АК поражения, значения которых передают на соответствующие авиационные АК. Распределяют на каждом r-м АК поражения mr полученных значений координат местоположения целей по УБП,
Распределяют на БПЛА М координат местоположения целей по R числу АК поражения, значения которых передают на соответствующие авиационные АК. Распределяют на каждом r-м АК поражения mr полученных значений координат местоположения целей по УБП,  Осуществляют запуск r-м АК поражения nr-го УБП,
Осуществляют запуск r-м АК поражения nr-го УБП,  Каждым nr-м УБП в полете по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе определяют координаты своего текущего местоположения и, относительно их значений и заданных значений координат местоположения распределенной ему цели, корректируют свой полет в цель. 2 ил.
Каждым nr-м УБП в полете по параметрам принимаемых радионавигационных сигналов от НЛРНС и значений заданных координат установки забрасываемых РНС в заданном районе определяют координаты своего текущего местоположения и, относительно их значений и заданных значений координат местоположения распределенной ему цели, корректируют свой полет в цель. 2 ил.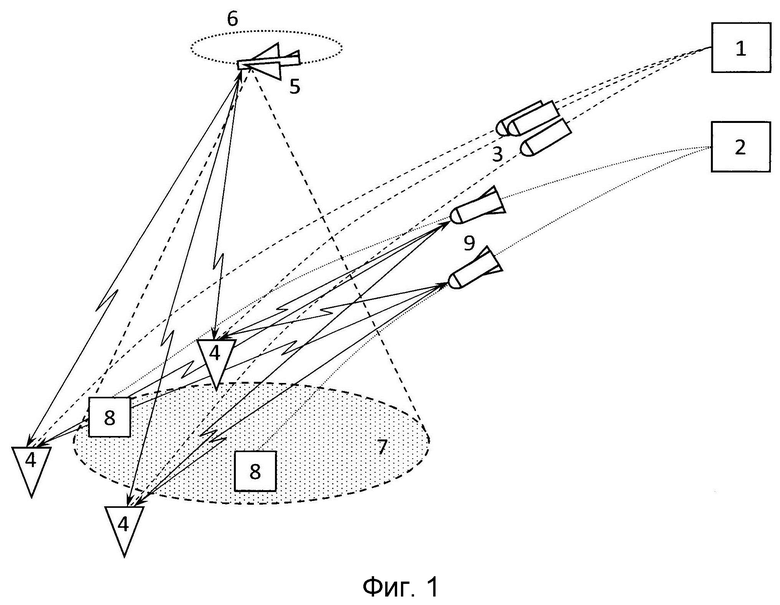
Способ поражения объектов управляемыми боеприпасами в локальной радионавигационной системе, основанный на формировании наземной локальной радионавигационной системы путем установки в заданные координаты К≥k забрасываемых радионавигационных средств в заданном районе, где k - минимальное количество забрасываемых радионавигационных средств, необходимых для формирования наземной локальной радионавигационной системы в заданном районе, отличающийся тем, что установку забрасываемых радионавигационных средств осуществляют назначенным авиационным комплексом путем их запуска во время полета, и после ее формирования запускают в заданный район назначенным авиационным комплексом беспилотный летательный аппарат наблюдения подстилающей поверхности, на беспилотном летательном аппарате по параметрам принимаемых радионавигационных сигналов от наземной локальной радионавигационной системы и значений заданных координат установки забрасываемых радионавигационных средств в заданном районе определяют координаты своего текущего местоположения, осуществляют беспилотным летательным аппаратом наблюдение подстилающей поверхности путем полета в заданном районе, при обнаружении беспилотным летательным аппаратом М≥1 целей в заданной районе определяют относительно значений его текущих координат местоположения координаты местоположения целей, а также определяют необходимое число авиационных комплексов поражения  для поражения М целей, где N - число управляемых боеприпасов авиационного комплекса поражения,
для поражения М целей, где N - число управляемых боеприпасов авиационного комплекса поражения,  - целая часть отношения
- целая часть отношения  распределяют на беспилотном летательном аппарате М координат местоположения целей по R числу авиационных комплексов поражения, значения которых передают на соответствующие авиационные комплексы поражения, распределяют на каждом r-м авиационном комплексе поражения mr полученных значений координат местоположения целей по управляемым боеприпасам,
распределяют на беспилотном летательном аппарате М координат местоположения целей по R числу авиационных комплексов поражения, значения которых передают на соответствующие авиационные комплексы поражения, распределяют на каждом r-м авиационном комплексе поражения mr полученных значений координат местоположения целей по управляемым боеприпасам,  осуществляют запуск r-м авиационным комплексом поражения nr-го управляемого боеприпаса,
осуществляют запуск r-м авиационным комплексом поражения nr-го управляемого боеприпаса,  каждым nr-м управляемым боеприпасом в полете по параметрам принимаемых радионавигационных сигналов от наземной локальной радионавигационной системы и значений заданных координат установки забрасываемых радионавигационных средств в заданном районе определяют координаты своего текущего местоположения и, относительно их значений и заданных значений координат местоположения распределенной ему цели, корректируют свой полет в цель.
каждым nr-м управляемым боеприпасом в полете по параметрам принимаемых радионавигационных сигналов от наземной локальной радионавигационной системы и значений заданных координат установки забрасываемых радионавигационных средств в заданном районе определяют координаты своего текущего местоположения и, относительно их значений и заданных значений координат местоположения распределенной ему цели, корректируют свой полет в цель.
| СПОСОБ ВЫСОКОТОЧНОГО ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2014 |
|
RU2598687C2 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ УПРАВЛЯЕМЫМ БОЕПРИПАСОМ В СЛОЖНОЙ ФОНОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2019 |
|
RU2719891C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ АРТИЛЛЕРИЙСКИМИ САМОНАВОДЯЩИМИСЯ БОЕПРИПАСАМИ | 2020 |
|
RU2738330C1 |
| КОМПОЗИТНАЯ БРОНЯ | 2007 |
|
RU2329455C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ЗАЛПОМ АТМОСФЕРНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2691233C2 |

