Изобретение относится к области систем оптико-электронного наблюдения вертолетного базирования.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ наблюдения огневых средств (ОС) (см., например, Авиационное вооружение и авионика. Энциклопедия XXI века. Оружие и технологии России. - М.: Оружие и технологии. Том X, 1999. стр.360-405), основанный на оптико-электронном наблюдении подстилающей поверхности с борта вертолета.
Недостатком способа является ограниченная дальность оптико-электронного наблюдения бортовым средством оптико-электронного наблюдения на маршруте полета вертолета, определяемая преимущественно дальностью прямой видимости и разрешающей способностью средства оптико-электронного наблюдения. Ограниченная дальность оптико-электронного наблюдения может привести к уменьшению времени реакции экипажа или бортового комплекса обороны вертолета на принятие мер противодействия ОС.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является увеличение дальности наблюдения подстилающей поверхности и обнаружения различных объектов, расположенных на маршруте полета вертолета.
Технический результат достигается тем, что в известном способе адаптивного оптико-электронного наблюдения, основанном на наблюдении подстилающей поверхности бортовым средством оптико-электронного наблюдения (СОЭН) вертолета, осуществляют доставку на заданное удаление в направлении полета вертолета дополнительное СОЭН, установленное на дистанционно-пилотируемом летательном аппарате (ДПЛА), производят наблюдение удаленного участка подстилающей поверхности дополнительным СОЭН и передают полученное изображение на борт вертолета, где анализируют полученное изображение и при необходимости изменяют параметры наблюдения подстилающей поверхности дополнительным СОЭН, определяют координаты ДПЛА и передают их значения на борт вертолета, определяют координаты местоположения вертолета, по полученным значениям координат вертолета и ДПЛА оценивают параметры рассогласования их взаимного местоположения, в случае несоответствия параметров рассогласования взаимного местоположения вертолета и ДПЛА заданным, автоматически корректируют их значения изменением местоположения ДПЛА.
Сущность изобретения заключается в адаптивном управлении траекторией полета предварительно забрасываемого носителя дополнительного СОЭН относительно траектории полета вертолета. Управление полетом носителя дополнительного СОЭН осуществляется с вертолета. При этом обеспечивается автоматическая привязка траектории полета носителя дополнительного СОЭН к текущей траектории полета вертолета. Изображение, получаемое дополнительным СОЭН, передается на борт вертолета.
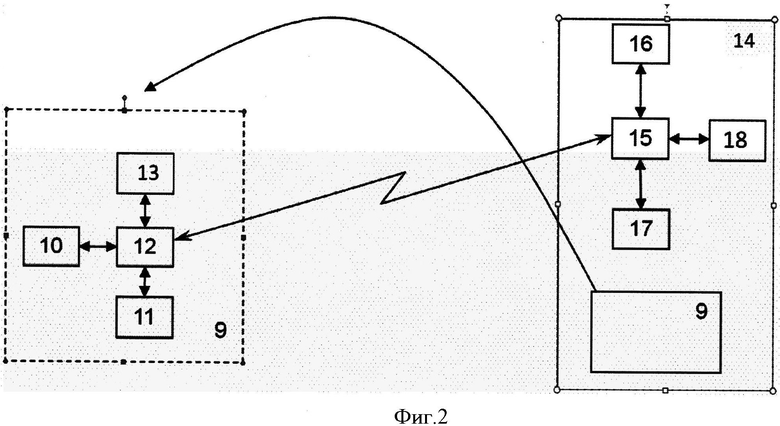
На фигуре 1 представлена схема, поясняющая способ, где: 1 - вертолет с бортовым СОЭН; 2 - носитель дополнительного СОЭН; 3 - сектор просмотра бортового СОЭН вертолета; 4 - сектор просмотра дополнительного СОЭН; 5 - огневое средство; 6 - рубеж (точка) изменения направления полета вертолета; 7, 8 - направления полета вертолета и носителя дополнительного СОЭН. Вертолет, двигаясь в направлении 7, бортовым СОЭН 1 осуществляет наблюдение подстилающей поверхности, в секторе 3, ограниченном техническими характеристиками СОЭН, ландшафтом и метеоусловиями. При необходимости увеличения дальности наблюдения подстилающей поверхности (принятие такого решения может быть обусловлено дополнительной информацией о возможном нахождении ОС на маршруте полета, по изменению ландшафта подстилающей поверхности и т.д.) экипаж вертолета осуществляет запуск носителя дополнительного СОЭН 2 в предполагаемую точку наблюдения. В результате экипаж вертолета получает возможность осуществлять наблюдение подстилающей поверхности на удаленном участке маршрута полета по изображению сектора 4, полученному СОЭН 3, и наблюдение подстилающей поверхности с помощью бортового СОЭН 1. В случае необходимости экипаж изменяет сектор просмотра 4 подстилающей поверхности (параметры ведения съемки СОЭН 2) дополнительного СОЭН 2. При этом носитель дополнительного СОЭН 2 имеет увеличенные скоростные характеристики по маневру и полету по отношению к вертолету 1. После доставки в предполагаемую точку наблюдения полет носителя дополнительного СОЭН 2 осуществляется по траектории, «адаптивной» к траектории полета вертолета 1. Т.е. параметры изменения направления 7 полета вертолета 1 автоматически передаются на носитель дополнительного СОЭН 2, который корректирует свое направление 8 полета в соответствии с траекторией полета вертолета. Для этого осуществляется определение координат местоположения носителя 2, их передача на борт вертолета 1, обработка координат в интересах оценки взаимного расположения носителя 2 и вертолета 1, выработка и передача сигналов управления полетом на носитель 2. Так, в случае обнаружения ОС 5 (фигура 1) по изображению, полученному дополнительным СОЭН 2 и переданному на борт вертолета 1, экипаж на рубеже 6 корректирует направление 7 полета с целью безопасного обхода ОС 5. Одновременно соответствующие сигналы передаются на носитель дополнительного СОЭН 2, который также осуществляет корректировку направления 8 полета, адаптивную к направлению 7 полета вертолета 1. Таким образом, у заявляемого способа появляется возможность расширить область наблюдения подстилающей поверхности, а использование автоматического адаптивного управления траекторией полета носителя дополнительного СОЭН высвобождает экипажу время и ресурс для решения других задач, в том числе по противодействию угрозе поражения ОС 5.
На фигуре 2 представлена блок-схема устройства, с помощью которого может быть реализован предлагаемый способ. Блок-схема устройства содержит: установленный на подвесном пусковом устройстве вертолета ДПЛА 9, на борту которого установлены СОЭН 10, радионавигационный приемник 11, блок приема/передачи данных 12, сопряженный радиоканалом с блоком передачи/приема данных вертолета, блок траекторного управления ДПЛА 13; на борту вертолета 14: блок приема/передачи данных 15, бортовое СОЭН 16 вертолета, сопряженное с СОЭН 10, радионавигационный приемник 17, бортовой блок управления траекторией полета ДПЛА 18. Все бортовые средства и блоки связаны линиями передачи данных между собой.
Устройство работает следующим образом. Бортовое СОЭН 16 вертолета 14 осуществляет наблюдение подстилающей поверхности. В случае расширения области наблюдения экипаж осуществляет запуск ДПЛА 9, на борту которого установлено дополнительное СОЭН 10. СОЭН 10 на определенном удалении от вертолета осуществляет наблюдение подстилающей поверхности и передает изображение с помощью сопряженных по радиоканалу блоков приема/передачи данных 12, 15 в бортовое СОЭН 16. Радионавигационный приемник 11 определяет координаты местоположения ДПЛА 9, значения которых с помощью сопряженных по радиоканалу блоков приема/передачи данных 12, 15 передает в бортовой блок управления траекторией полета ДПЛА 18. Радионавигационный приемник 17 определяет координаты местоположения вертолета 14, значения которых также передает в бортовой блок управления траекторией полета ДПЛА 18. Бортовой блок управления траекторией полета ДПЛА 18 по поступившим данным производит оценку взаимного расположения ДПЛА 9 и вертолета 14, формирует сигналы управления и с помощью сопряженных по радиоканалу блоков приема/передачи данных 12, 15 передает в блок траекторного управления ДПЛА 13. Блок траекторного управления ДПЛА 13 изменяет траекторию полета ДПЛА 13. В результате экипаж вертолета осуществляет наблюдение в требуемом направлении подстилающей поверхности на удаленном участке маршрута полета по изображению, полученному СОЭН 10, и наблюдение за подстилающей поверхностью с помощью бортового СОЭН 16.
Таким образом, предлагаемый способ позволяет за счет использования высокоскоростного ДПЛА и дополнительного СОЭН увеличить дальность наблюдения подстилающей поверхности на маршруте полета вертолета, а использование автоматического адаптивного управления траекторией полета носителя дополнительного СОЭН относительно траектории полета вертолета - сохранить динамические характеристики полета вертолета и эксплуатационный ресурс экипажа для решения других задач. Тем самым предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ адаптивного оптико-электронного наблюдения, основанный на наблюдении подстилающей поверхности бортовым СОЭН вертолета, осуществлении доставки на заданное удаление в направлении полета вертолета дополнительного СОЭН, установленного на ДПЛА, произведении наблюдения удаленного участка подстилающей поверхности дополнительным СОЭН и передачи полученного изображения на борт вертолета, анализе на борту вертолета полученного изображения и изменении при необходимости параметров наблюдения подстилающей поверхности дополнительным СОЭН, определении координат местоположения ДПЛА и передачи их значений на борт вертолета, определении координат местоположения вертолета, оценке по полученным значениям координат вертолета и ДПЛА параметров рассогласования их взаимного местоположения, автоматической корректировке их значения изменением местоположения ДПЛА в случае несоответствия параметров рассогласования взаимного местоположения вертолета и ДПЛА заданным.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптико-электронные, радиоэлектронные узлы и устройства, а также современные высокоскоростные (в том числе реактивные) ДПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ | 2013 |
|
RU2540002C1 |
| Способ поиска оптических и оптико-электронных приборов | 2016 |
|
RU2676856C2 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВЕРТОЛЕТА | 2009 |
|
RU2403181C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОЙ РАДИООХРАНЫ С ИСПОЛЬЗОВАНИЕМ ПАТРУЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2238590C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| СПОСОБ ЗАЩИТЫ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2008 |
|
RU2373482C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННОГО СРЕДСТВА ВОЗДУШНОГО КОМПЛЕКСА ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ | 2022 |
|
RU2792921C1 |
| СПОСОБ НАБЛЮДЕНИЯ ОБЪЕКТОВ С ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА, ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ОБЗОРНАЯ КАДРОВАЯ СИСТЕМА ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2279999C2 |
Изобретение относится к области систем оптико-электронного наблюдения вертолетного базирования. Техническим результатом, на достижение которого направлено предлагаемое изобретение, является увеличение дальности наблюдения подстилающей поверхности и обнаружения различных объектов, расположенных на маршруте полета вертолета. Сущность изобретения заключается в адаптивном управлении траекторией полета предварительно забрасываемого носителя дополнительного средства оптико-электронного наблюдения относительно траектории полета вертолета. Управление полетом носителя дополнительного средства оптико-электронного наблюдения осуществляется с вертолета. При этом обеспечивается автоматическая привязка траектории полета носителя дополнительного средства оптико-электронного наблюдения к текущей траектории полета вертолета. Изображение, получаемое дополнительным средством оптико-электронного наблюдения, передается на борт вертолета. 2 ил.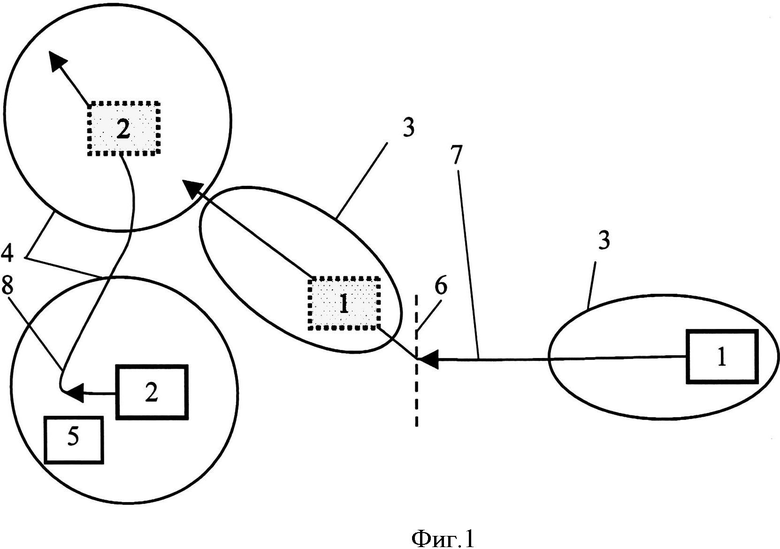
Способ адаптивного оптико-электронного наблюдения, основанный в наблюдении подстилающей поверхности бортовым средством оптико-электронного наблюдения вертолета, отличающийся тем, что осуществляют доставку на заданное удаление в направлении полета вертолета дополнительного средства оптико-электронного наблюдения, установленного на дистанционно-пилотируемом летательном аппарате, производят наблюдение удаленного участка подстилающей поверхности дополнительным средством оптико-электронного наблюдения и передают полученное изображение на борт вертолета, где анализируют полученное изображение и при необходимости изменяют параметры наблюдения подстилающей поверхности дополнительным средством оптико-электронного наблюдения, определяют координаты местоположения дистанционно-пилотируемого летательного аппарата и передают их значения на борт вертолета, определяют координаты местоположения вертолета, по полученным значениям координат вертолета и дистанционно-пилотируемого летательного аппарата оценивают параметры рассогласования их взаимного местоположения, в случае несоответствия параметров рассогласования взаимного местоположения вертолета и дистанционно-пилотируемого летательного аппарата заданным, автоматически корректируют их значения изменением местоположения дистанционно-пилотируемого летательного аппарата.
| Авиационное вооружение и авионика | |||
| Энциклопедия XXI века | |||
| Оружие и технологии России | |||
| - М.: Оружие и технологии | |||
| Том X, 1999 | |||
| Способ приготовления искусственной массы из продуктов конденсации фенолов с альдегидами | 1920 |
|
SU360A1 |
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| Сновальная машина | 1935 |
|
SU44838A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2002 |
|
RU2223515C1 |
| JP 8125915 A, 17.05.1996 | |||
| US 20080180655 A1, 31.07.20 | |||

