Изобретение относится к области огневого поражения объектов и может быть использовано в высокоточных комплексах, использующих на различных этапах наведения управляемых боеприпасов глобальные спутниковые навигационные системы (ГСНС).
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ поражения цели артиллерийскими самонаводящимися боеприпасами (АСНБ) с использованием ГСНС [см., например, Пат. 2738330 RU, МПК F41G 3/00. Способ поражения цели артиллерийскими самонаводящимися боеприпасами / П.Е. Кулешов, А.В. Ганин, В.Н. Неровный и др.; заявитель и патентообладатель ВУНЦ ВВС «ВВА» (г. Воронеж). - №2020106349; заявл. 10.02.2020 г.; опубл. 11.12.2020 г.], основанный на определении координат цели и внесении их значений в АСНБ, определении К≥k числа значений координат установки приемо-передающих блоков в районе размещения цели, где k - минимальное количество источников навигационных сигналов, необходимых для определения местоположения АСНБ на этапе наведения, доставке запуском К≥k неуправляемых носителей К≥k приемо-передающих блоков в свои координаты, определении на каждом приемо-передающем блоке по ГСНС координат своего местоположения, формировании по значениям координат своего местоположения в каждом приемо-передающем блоке своих помехоустойчивых навигационных сигналов и передаче их, произведении запуска АСНБ, приеме помехоустойчивых навигационных сигналов приемо-передающих блоков АСНБ, определении по значениям их параметров текущих координат своего местоположения и, относительно их значений, корректировке полета АСНБ на цель.
Недостатком способа является низкая точность определения местоположения АСНБ на начальном и конечном участках его полета, обусловленная взаимным расположением приемо-передающих блоков и АСНБ в пространстве.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности поражения цели АСНБ, использующих сигналы навигационных систем.
Технический результат достигается тем, что в известном способе наведения артиллерийских управляемых боеприпасов, основанном на определении координат цели и внесении их значений в АСНБ, определении К≥k числа значений координат установки наземных приемо-передающих блоков в районе размещения цели, где к - минимальное количество источников навигационных сигналов, необходимых для определения местоположения АСНБ на этапе наведения, осуществлении запуском К≥k неуправляемых носителей доставки К>k наземных приемо-передающих блоков в свои координаты, определении на каждом наземном приемо-передающем блоке по глобальной ГСНС координат своего местоположения, формировании по значениям координат своего местоположения в каждом наземном приемо-передающем блоке своих помехоустойчивых навигационных сигналов и передачи их, определяют N≥1 значений координат зон местоположения-барражирования БпЛА с приемо-передающими блоками относительно К координат точек местоположения наземных приемо-передающих блоков и вносят их значения в соответствующий БпЛА с приемо-передающими блоками, осуществляют запуск N≥1 БпЛА с приемо-передающими блоками, которые принимают и измеряют параметры помехоустойчивых навигационных сигналов К≥k наземных приемо-передающих блоков, по значениям координат местоположения наземных приемо-передающих блоков каждый БпЛА с приемо-передающими блоками вычисляет свои текущие координаты местоположения в пространстве, с использованием текущих координат своего местоположения каждый БпЛА с приемо-передающими блоками осуществляет полет в расчетные координаты своей зоны местоположения-барражирования и, по прилету, по значениям координат своего текущего местоположения каждый приемо-передающий блок БпЛА формирует свои помехоустойчивые навигационные сигналы и передает их, производят запуск АСНБ, принимают АСНБ помехоустойчивые навигационные сигналы наземных приемо-передающих блоков и приемо-передающих блоков БпЛА, определяют по значениям их параметров на АСНБ текущие координаты своего местоположения и, относительно их значений, корректируют полет АСНБ на цель.
Сущность изобретения заключается формировании дублирующей системы радионавигационного обеспечения наведения АСНБ с помощью доставляемых приемопередатчиков, размещаемых на поверхности земли и в воздудушном пространстве.
Использование локальной радионавигационной системы (ЛРНС) может обеспечить высокую помехоустойчивость АСНБ. В работе [см., например, Пат. 2738330 RU, МПК F41G 3/00. Способ поражения цели артиллерийскими самонаводящимися боеприпасами / П.Е. Кулешов, А.В. Ганин, В.Н. Неровный и др.; заявитель и патентообладатель ВУНЦ ВВС «ВВА» (г. Воронеж). - №2020106349; заявл. 10.02.2020 г.; опубл. 11.12.2020 г.] предложен способ формирования наземной ЛРНС забрасываемыми радионавигационными элементами в интересах наведения АСНБ. Однако, точность координатного обеспечения АСНБ существенно зависит от текущей высоты местоположения АСНБ. Так на начальной и конечных траекториях (высотах) точность координатного обеспечения АСНБ будет минимальной. Это обуславливается ограничениями метода определения местоположения радиоэлектронного средства, лежащего в основе способа. Для повышения точности координатного обеспечения АСНБ предлагается использовать БпЛА, как дополнительные радионавигационные элементы к наземной ЛРНС.
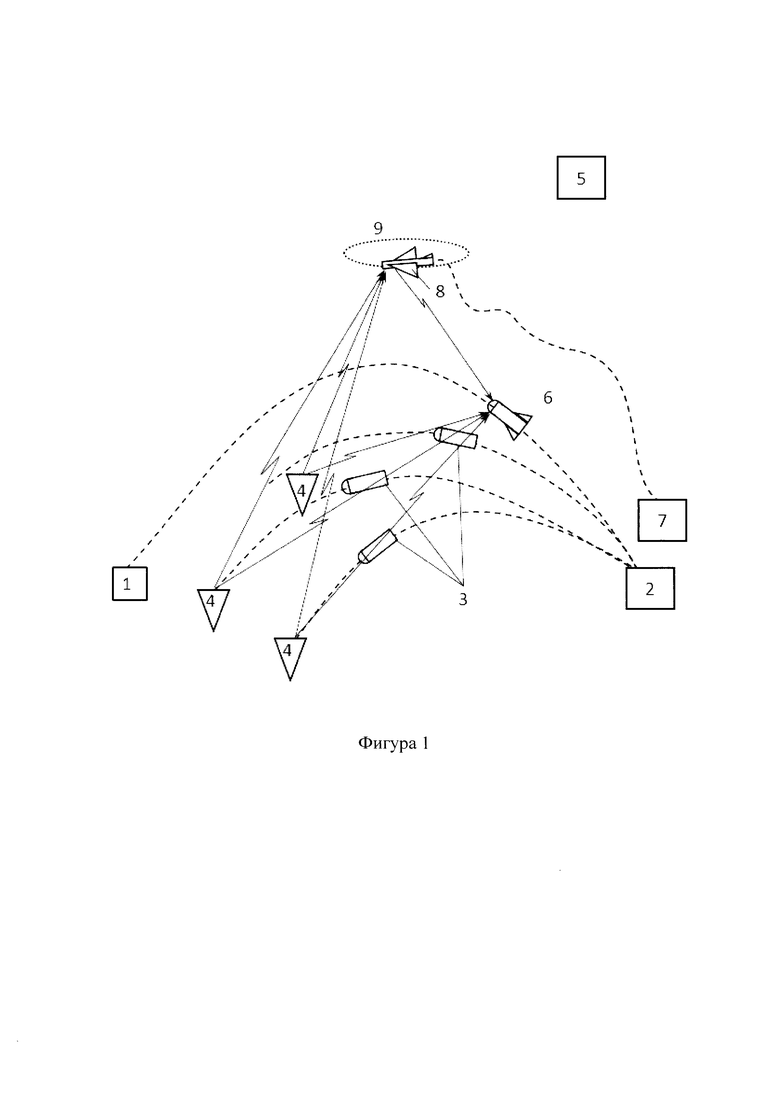
В целом, задача поражения цели АСНБ в предлагаемом способе осуществляется следующим образом (см. фигуру 1, где: 1 - цель, 2 - артиллерийский комплекс, 3 - носители приемо-передающих блоков, 4 - приемо-передающие блоки, 5 - элементы ГСНС, 6 - АСНБ, 7 - БпЛА с приемо-передающими блоками, 8 - пункт запуска БпЛА; 9 - зона местоположения-барражирования БпЛА).
Предварительно на артиллерийском комплексе 2 определяют координаты цели 1 и их значения вносят в систему наведения АСНБ 6.
Для формирования дублирующей системы навигационного обеспечения определяют К≥k количество значений координат точек установки наземных приемо-передающих блоков 4 в районе размещения цели 1 (где к - минимальное количество источников навигационных сигналов, необходимых для определения местоположения АСНБ 6), а также, относительно их, определяют координаты N≥1 зон местоположения-барражирования БпЛА 9 с приемо-передающими блоками, обеспечивающими повышение точности местоопределения АСНБ 6. При этом местоположение наземных приемо-передающих блоков 4 и БпЛА 8 определяется размерами зоны покрытия пространства локальным навигационным полем. Осуществляют запуск К неуправляемых носителей 3 и доставку К наземных приемо-передающих блоков 4 в свои координаты. После фиксации в грунте приемо-передающие блоки 4 приводятся в рабочее состояние и определяют по ГСНС 5 свои координаты местоположения. На основе значений своих координат местоположения приемо-передающие блоки 4 формируют помехоустойчивые навигационные сигналы и передают их. Помехоустойчивость сформированных сигналов реализуется техническими методами, обеспечивающими их устойчивый прием БпЛА 8 и АСНБ 6. С наземного пункта запуска БпЛА 7 осуществляют запуск N≥1 БпЛА 8, которые принимают и измеряют параметры помехоустойчивых навигационных сигналов К наземных приемо-передающих блоков 4. По значениям координат местоположения наземных приемо-передающих блоков 4 каждый БпЛА 8 с приемо-передающими блоками вычисляет свои текущие координаты местоположения в пространстве, с использованием которых осуществляет полет в расчетные координаты своего местоположения-барражирования 9. Производят запуск АСНБ 6, который в зоне воздействия помех принимает помехоустойчивые сигналы наземных приемо-передающих блоков 4 и БпЛА 8, и по значениям их параметров осуществляет наведение на цель 1.
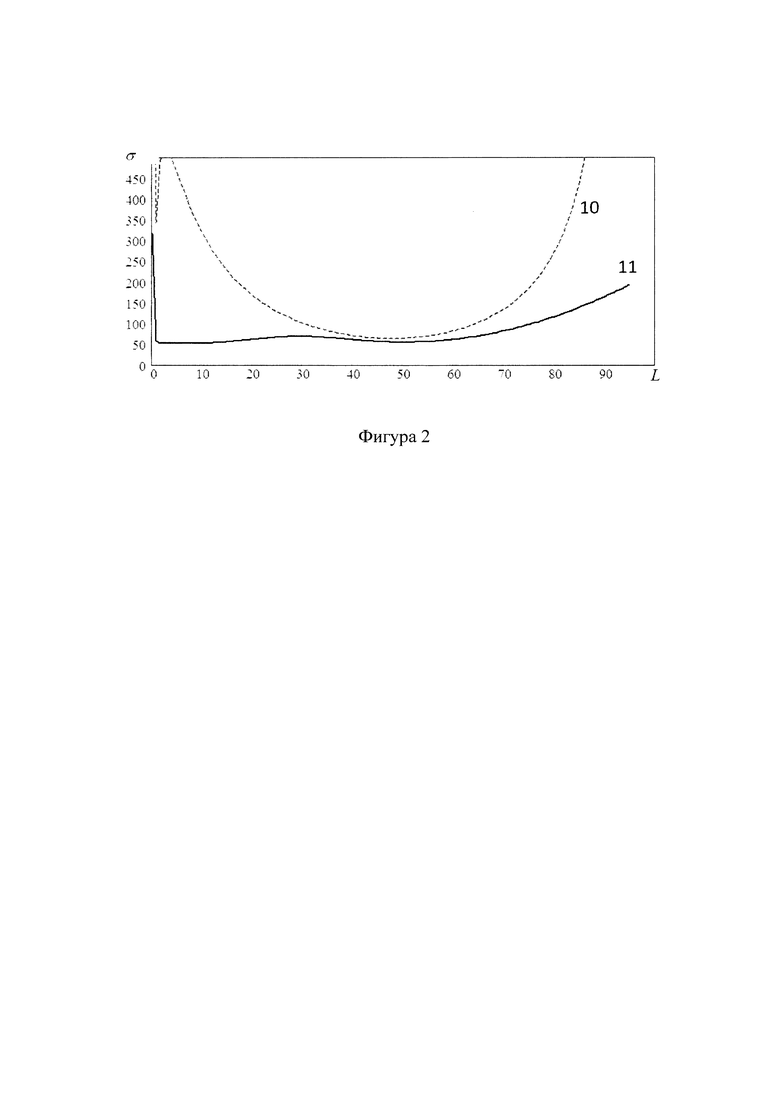
На фигуре 2, представлены зависимости среднеквадратичной ошибки местоположения АСНБ от дистанции полета, характеризующие сравнение прототипа с предлагаемым способом (где: зависимость 10 - прототип; зависимость 11 - предлагаемый способ; L - дальность полета АСНБ; а - среднеквадратичная ошибка местоположения АСНБ). Анализ зависимостей показывает существенное преимущество предлагаемого способа перед прототипом на начальном и конечном этапах полета АСНБ.
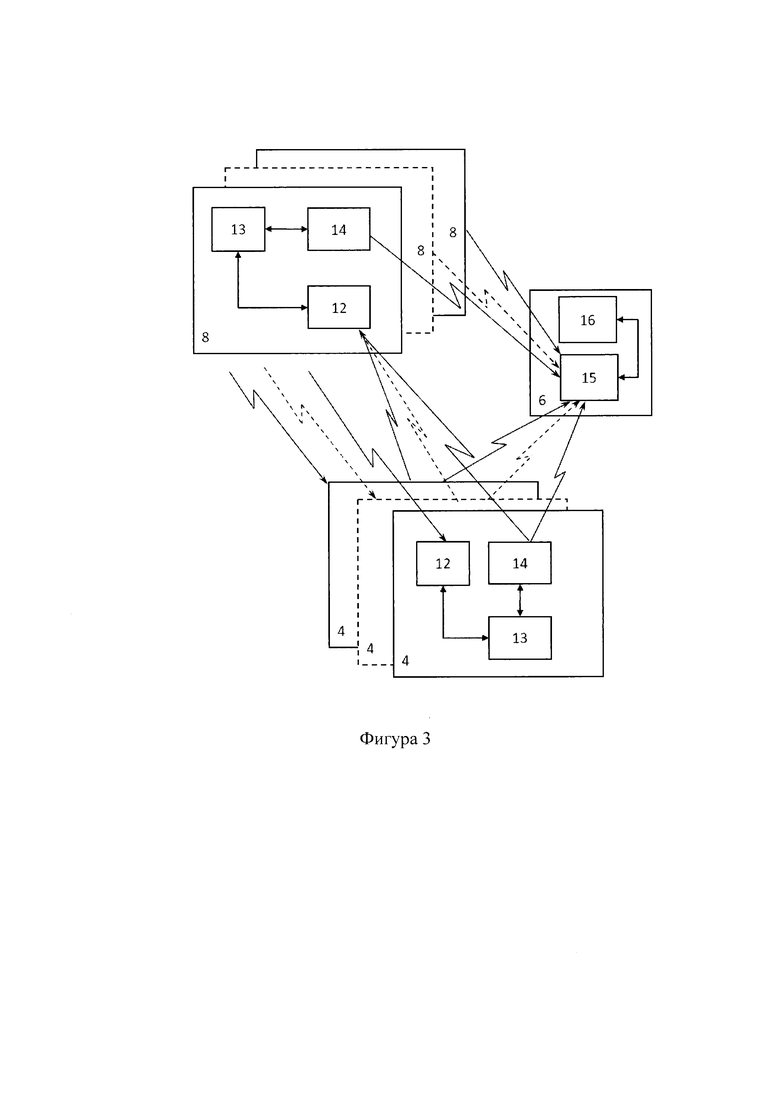
На фигуре 3 изображена блок-схема варианта устройства, реализующего способ. Блок-схема включает: навигационный блок 12, блок формирования помехоустойчивых навигационных сигналов 13, передающий блок 14, навигационный блок АСНБ 15, автопилот 16, остальные обозначения соответствуют фигуре 1.
Устройство работает следующим образом. Артиллерийский комплекс осуществляет запуск К≥k неуправляемых носителей и доставку К≥k приемо-передающих блоков 4 в свои координаты. После фиксации в грунте приемо-передающие блоки 4 приводятся в рабочее состояние. Навигационные блоки 12 определяют свои координаты местоположения, сигналы значений которых передают в свои блоки формирования помехоустойчивых навигационных сигналов 13. Блоки формирования помехоустойчивых навигационных сигналов 13 формируют помехоустойчивые сигналы и передают их в свои передающие блоки 14. Передающие блоки 14 излучают помехоустойчивые навигационные сигналы. Осуществляют запуск БпЛА 8, которые принимает своими навигационными блоками 12 помехоустойчивые навигационные сигналы и определяют свои координаты местоположения, сигналы значений которых передают в свои блоки формирования помехоустойчивых навигационных сигналов 13. Блоки формирования помехоустойчивых навигационных сигналов 13 БпЛА 8 формируют помехоустойчивые сигналы и передают их в свои передающие блоки 12. Передающие блоки 14 БпЛА 8 излучают помехоустойчивые навигационные сигналы. Навигационный блок АСНБ 15 принимает помехоустойчивые навигационные сигналы наземных приемо-передающих блоков 4 и БпЛА 8 и по значениям их параметрам определяет координаты местоположения АСНБ 6. При этом навигационный блок АСНБ 15 обработку навигационных сигналов «стандартных» ГСНС прекращает осуществлять. Далее навигационный блок АСНБ 15 передает сигналы значений координат в автопилот 16, который корректирует траекторию полета АСНБ 6.
Таким образом, предлагаемый способ позволяет повысить эффективность поражения цели АСНБ, использующих сигналы навигационных систем, за счет формировании дублирующей системы навигационного обеспечения наведения АСНБ с помощью доставляемых приемопередатчиков наземного и воздушного базирования, обеспечивающих повышение точности определения местоположения АСНБ в полете к цели. Следовательно, предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ наведения артиллерийских управляемых боеприпасов, основанный на определении координат цели и внесении их значений в АСНБ, определении К≥k числа значений координат установки наземных приемо-передающих блоков в районе размещения цели, где k - минимальное количество источников навигационных сигналов, необходимых для определения местоположения АСНБ на этапе наведения, осуществлении запуском К≥k неуправляемых носителей доставки К≥k наземных приемо-передающих блоков в свои координаты, определении на каждом наземном приемо-передающем блоке по ГСНС координат своего местоположения, формировании по значениям координат своего местоположения в каждом наземном приемо-передающем блоке своих помехоустойчивых навигационных сигналов и передачи их, определении N≥1 значений координат зон местоположения-барражирования БпЛА с приемо-передающими блоками относительно К координат точек местоположения наземных приемо-передающих блоков и внесении их значений в соответствующий БпЛА с приемо-передающими блоками, осуществлении запуска N≥1 БпЛА с приемо-передающими блоками, которые принимают и измеряют параметры помехоустойчивых навигационных сигналов К≥k наземных приемо-передающих блоков, вычислении по значениям координат местоположения наземных приемо-передающих блоков каждым БпЛА с приемо-передающими блоками своих текущих координат местоположения в пространстве, осуществлении с использованием текущих координат своего местоположения каждым БпЛА с приемо-передающими блоками полета в расчетные координаты своей зоны местоположения-барражирования и, по прилету, формировании по значениям координат своего текущего местоположения каждым приемо-передающим блоком БпЛА своих помехоустойчивых навигационных сигналов и передаче их, произведении запуска АСНБ, приеме АСНБ помехоустойчивых навигационных сигналов наземных приемо-передающих блоков и приемо-передающих блоков БПЛА, определении по значениям их параметров на АСНБ текущих координат своего местоположения и, относительно их значений, корректировке полета АСНБ на цель.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые радиоэлектронные узлы и устройства, а также средства доставки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ОБЪЕКТОВ УПРАВЛЯЕМЫМИ БОЕПРИПАСАМИ В ЛОКАЛЬНОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 2024 |
|
RU2835023C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ АРТИЛЛЕРИЙСКИМИ САМОНАВОДЯЩИМИСЯ БОЕПРИПАСАМИ | 2020 |
|
RU2738330C1 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| БАРРАЖИРУЮЩИЙ БОЕПРИПАС | 2023 |
|
RU2821739C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| Способ подсвета цели для обеспечения применения боеприпасов с лазерной полуактивной головкой самонаведения | 2021 |
|
RU2755134C1 |
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ ПО НАВИГАЦИОННЫМ СИГНАЛАМ | 2020 |
|
RU2756333C1 |
Изобретение относится к области огневого поражения объектов и может быть использовано в высокоточных комплексах, использующих на различных этапах наведения управляемых боеприпасов глобальные спутниковые навигационные системы (ГСНС). Сущность способа наведения артиллерийских управляемых боеприпасов заключается в следующем. Определяют координаты цели и вносят их значения в артиллерийский самонаводящийся боеприпас (АСНБ). Определяют значения координат установки наземных приемо-передающих блоков (НППБ) в районе размещения цели и значения координат зон местоположения-барражирования (ЗМБ) беспилотных летательных аппаратов с приемо-передающими блоками (БпЛА с ППБ) относительно координат точек местоположения НППБ и вносят их значения в соответствующий БпЛА с ППБ. Определяют на каждом НППБ по ГСНС координат своего местоположения. Формируют свои помехоустойчивые навигационные сигналы и передают их. Каждый БпЛА с ППБ вычисляет свои текущие координаты местоположения в пространстве и далее осуществляет полет в расчетные координаты своей зоны ЗМБ и, по прилету, формирует свои помехоустойчивые навигационные сигналы и передает их. Определяют на АСНБ текущие координаты своего местоположения и корректируют полет АСНБ на цель. Технический результат – повышение эффективности поражения цели АСНБ, использующих сигналы навигационных систем. 3 ил.
Способ наведения артиллерийских управляемых боеприпасов, основанный на определении координат цели и внесении их значений в артиллерийский самонаводящийся боеприпас, определении K≥k числа значений координат установки наземных приемо-передающих блоков в районе размещения цели, где k - минимальное количество источников навигационных сигналов, необходимых для определения местоположения артиллерийского самонаводящегося боеприпаса на этапе наведения, осуществлении запуска K≥k неуправляемых носителей и доставки K≥k наземных приемо-передающих блоков в свои координаты, определении на каждом наземном приемо-передающем блоке по глобальной спутниковой навигационной системе координат своего местоположения, формировании по значениям координат своего местоположения в каждом наземном приемо-передающем блоке своих помехоустойчивых навигационных сигналов и передачи их, отличающийся тем, что дополнительно определяют N≥1 значений координат зон местоположения-барражирования беспилотных летательных аппаратов с приемо-передающими блоками относительно K координат точек местоположения наземных приемо-передающих блоков и вносят их значения в соответствующий беспилотный летательный аппарат с приемо-передающими блоками, осуществляют запуск N≥1 беспилотных летательных аппаратов с приемо-передающими блоками, которые принимают и измеряют параметры помехоустойчивых навигационных сигналов K≥k наземных приемопередающих блоков, по значениям координат местоположения наземных приемопередающих блоков каждый беспилотный летательный аппарат с приемо-передающими блоками вычисляет свои текущие координаты местоположения в пространстве, с использованием текущих координат своего местоположения каждый беспилотный летательный аппарат с приемо-передающими блоками осуществляет полет в расчетные координаты своей зоны местоположения-барражирования и, по прилету, по значениям координат своего текущего местоположения каждый приемо-передающий блок беспилотного летательного аппарата формирует свои помехоустойчивые навигационные сигналы и передает их, производят запуск артиллерийского самонаводящегося боеприпаса, принимают артиллерийским самонаводящимся боеприпасом помехоустойчивые навигационные сигналы наземных приемо-передающих блоков и приемо-передающих блоков беспилотных летательных аппаратов, определяют по значениям их параметров на артиллерийском самонаводящимся боеприпасе текущие координаты своего местоположения и, относительно их значений, корректируют полет артиллерийского самонаводящегося боеприпаса на цель.
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ АРТИЛЛЕРИЙСКИМИ САМОНАВОДЯЩИМИСЯ БОЕПРИПАСАМИ | 2020 |
|
RU2738330C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ УПРАВЛЯЕМЫМ БОЕПРИПАСОМ В СЛОЖНОЙ ФОНОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2019 |
|
RU2719891C1 |
| КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОГО ПОРАЖЕНИЯ ЦЕЛЕЙ НА ОСНОВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2759534C1 |
| Способ подсвета цели для обеспечения применения боеприпасов с лазерной полуактивной головкой самонаведения | 2021 |
|
RU2755134C1 |
| Электромагнитный прерыватель | 1924 |
|
SU2023A1 |

