Изобретение относится к системам самонаведения самолетов и может быть использовано для скрытного, не обнаруживаемого противником наведения самолетов на воздушные объекты, оборудованные импульсно-доплеровскими РЛС (ИДРЛС).
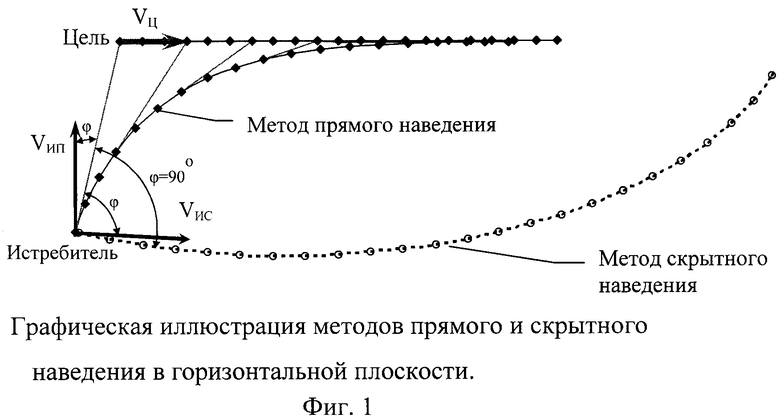
Известен традиционный способ самонаведения самолетов, основанный на использовании разновидностей прямого метода [1]. При прямом методе наведения, используемом в качестве прототипа, продольная ось наводимого самолета все время совмещается с линией визирования цели, а параметр рассогласования, который используется для управления, формируется по правилу:
где φ - бортовой пеленг цели (угол между продольной осью наводимого самолета и направлением на цель). Пример траектории управления, получаемой при использовании этого метода в горизонтальной плоскости, показан на фиг.1 сплошной линией. На этом чертеже Vц и Vип - векторы скорости цели и наводимого истребителя, φ - бортовой пеленг цели.
Для реализации этого метода необходимо иметь измерения бортовых пеленгов φ в плоскостях управления, получаемых в бортовой РЛС (БРЛС) наводимого самолета либо в активном, либо в пассивном режиме. Работа этой БРЛС в активном режиме (на излучение) снижает скрытность самонаведения и повышает вероятность огневого или радиоэлектронного противодействия противника. Вместе с тем, для организации огневого противодействия противоборствующая сторона вынуждена включать свою ИДРЛС для получения измерений угловых скоростей, дальности и скорости сближения с нашим самолетом, необходимых для его сопровождения и прицеливания [1].
Следует отметить, что основным типом БРЛС, используемых на современных летательных аппаратах (ЛА) всех стран, являются импульсно-доплеровские РЛС, системным недостатком которых является наличие зон доплеровской резекции [2], в которых воздушные объекты не обнаруживаются и не сопровождаются.
В геометрическом плане эти зоны представляют собой секторы, угловые размеры которых определяются величиной [3]

где V - скорость ВО (цели), a Vmin - минимальная скорость, значение которой определяется шириной спектра сигнала, отраженного от земли по главному лепестку диаграммы направленности облучающей антенны [2].
Наличие секторов резекции обусловливает появление сектора невидимых направлений движения (СННД). Взаимосвязь пространственного положения СННД, связанного с движением ВО, с соответствующим ему сектором резекции показана на фиг.2.
Вершина СННД находится в месте текущего положения ВО (точка О на фиг.2). Биссектриса (ось симметрии) OF сектора невидимых направлений движения перпендикулярна линии визирования SO ИДЛРС-ВО, а вектор скорости V воздушного объекта перпендикулярен биссектрисе SE сектора резекции. Поэтому угол VOF между вектором скорости V и биссектрисой СННД равен углу OSE между линией визирования SO и биссектрисой сектора резекции. В частности, если вектор скорости совпадает с границей СННД, то это означает, что ВО находится на границе зоны резекции. Из данных рассуждений следуют два факта. Во-первых, угловой размер сектора невидимых направлений движения совпадает с угловым размером сектора резекции, определяемого формулой (2), и, во-вторых, попадание вектора скорости цели (в земной системе координат) в СННД эквивалентно нахождению ВО в зоне резекции.
Из формулы (2) следует, что чем меньше скорость воздушного объекта, тем шире соответствующий ему СННД и больше возможностей скрытого маневрирования в зоне обнаружения доплеровской РЛС.
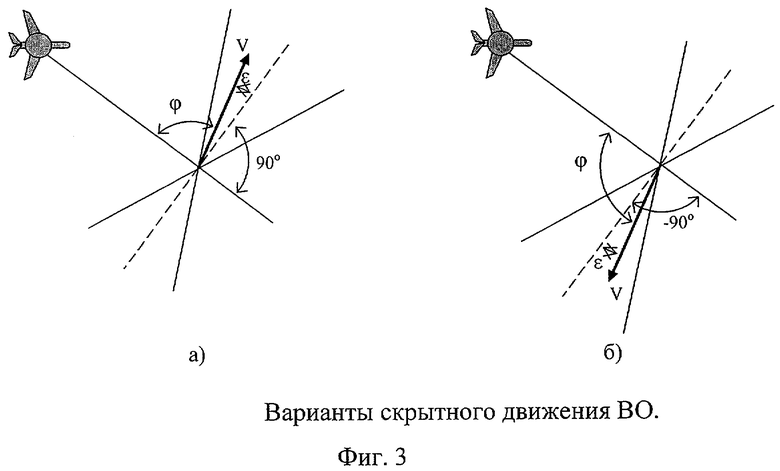
Движение в секторе резекции эквивалентно тому, что угол ε между осью симметрии СННД и вектором скорости не превосходит по модулю половины углового размера СННД. Схема двух вариантов скрытого движения ВО в СННД показана на фиг.3. При реализации первого варианта воздушный объект в процессе движения по скрытной траектории «поворачивает» линию визирования ИДРЛС-ВО против часовой стрелки. В соответствии со схемой на фиг.3а вектор V скорости ВО повернут на угол  относительно линии визирования ИДРЛС-ВО (на
относительно линии визирования ИДРЛС-ВО (на  повернута биссектриса СННД относительно линии визирования и на угол ε повернут вектор скорости ВО относительно биссектрисы). Второй вариант скрытного движения, схема которого показана на фиг.3б, характеризуется тем, что линия визирования вращается по часовой стрелке.
повернута биссектриса СННД относительно линии визирования и на угол ε повернут вектор скорости ВО относительно биссектрисы). Второй вариант скрытного движения, схема которого показана на фиг.3б, характеризуется тем, что линия визирования вращается по часовой стрелке.
Геометрические соотношения между носителем импульсно-доплеровской РЛС и наводимым самолетом в полярной системе координат, связанной с носителем, для ситуаций, показанных на фиг.3а и 3б соответственно, определяются формулами:


в которых  , Vн - скорость носителя ИДРЛС, на который наводится самолет, V - скорость наводимого самолета, ρ - расстояние SO, η - полярный угол, характеризующий направление движения самолета в выбранной системе координат (см. фиг.2).
, Vн - скорость носителя ИДРЛС, на который наводится самолет, V - скорость наводимого самолета, ρ - расстояние SO, η - полярный угол, характеризующий направление движения самолета в выбранной системе координат (см. фиг.2).
Соотношения (3) и (4) позволяют найти скрытые траектории движения ВО для различных соотношений скоростей V и Vн и величины угла ε отклонения вектора скорости самолета от биссектрисы СННД.
Расположение и ориентация СННД зависят от параметров движения доплеровской РЛС и наводимого самолета, которые, как правило, известны с некоторыми ошибками. Поэтому и направление скрытного движения будет определяться с ошибками. Кроме того, величина Vmin минимально разрешаемой радиальной скорости доплеровской РЛС неизвестна. В связи с этим для надежного обеспечения скрытности сближения воздушному объекту целесообразно двигаться в центре СННД, то есть так, чтобы его вектор скорости совпадал с биссектрисой СННД. Траектории, которые получаются при движении наводимого ВО в центре СННД, далее будем называть ортогональными, поскольку в этом случае вектор скорости наводимого самолета ортогонален линии визирования ИДРЛС-ВО (ε=0).
Чтобы получить уравнение скрытной траектории в полярной системе координат, которая в начальный момент проходит через точку (ρ0, η0), достаточно в выражении (3) положить ε=0:
Это уравнение описывает канонические сечения в полярной системе координат. В зависимости от соотношения скоростей V и Vн это могут быть либо параболы, либо эллипсы, либо гиперболы. Причем один из фокусов этих канонических сечений находится в начале подвижной системы координат, т.е. в месте расположения самолета-носителя ИДРЛС.
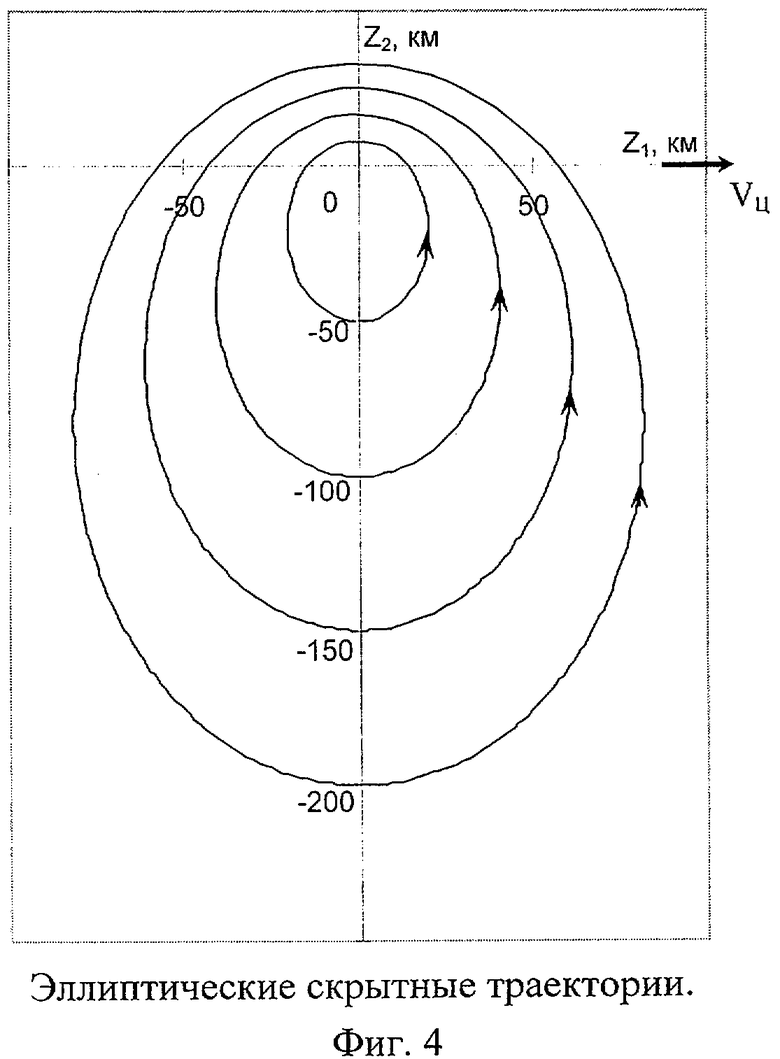
Наибольший интерес представляет случай, когда скорость V самолета, летящего по скрытной траектории, больше скорости Vн перемещения ИДРЛС, то есть V>Vн. Используя замену z1=ρ·cosη и z2=ρ·sinη из (5), можно получить уравнение траектории в прямоугольной системе координат:
где  , которое описывает семейство эллипсов с полуосями:
, которое описывает семейство эллипсов с полуосями:
причем b>a и, следовательно, эллипс вытянут вдоль одной оси. Один из фокусов каждого эллипса из семейства (6) находится в начале координат (т.е. в месте расположения ИДРЛС). Семейство эллиптических траекторий скрытного сближения в связанной с ИДРЛС перехватываемого самолета системе координат изображено на фиг.4.
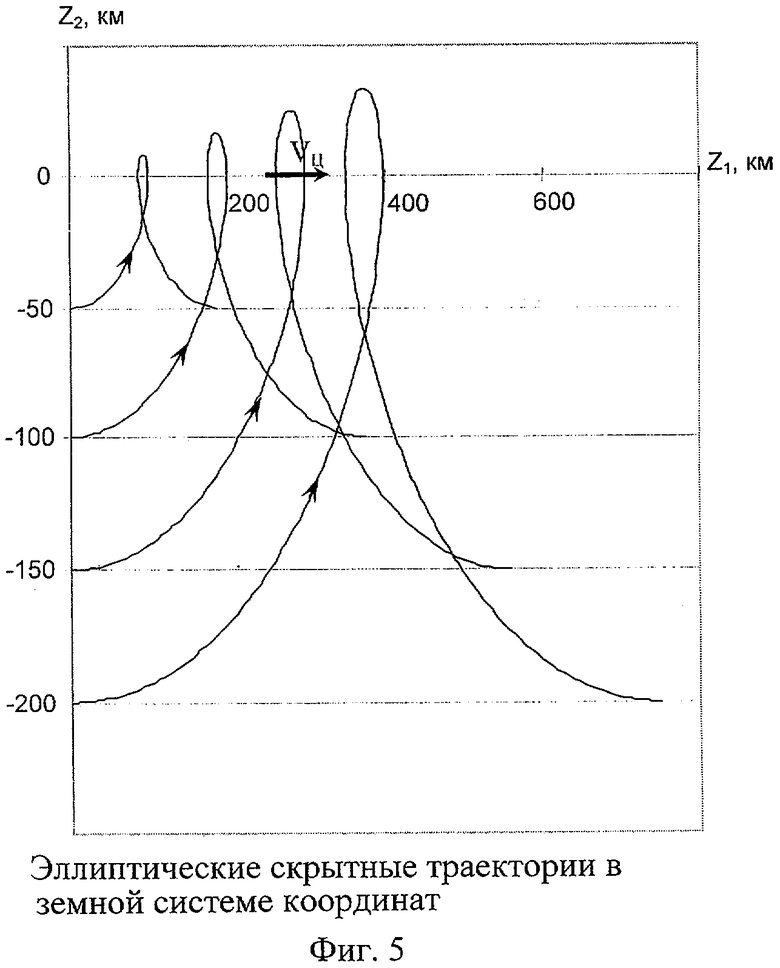
Скрытные эллиптические траектории в земной системе координат, соответствующие изображенным на фиг.4 траекториям, показаны на фиг.5.
Стрелками на фиг.5 показаны направления движения ВО по скрытным траекториям, при этом ИДРЛС, с которой осуществляется скрытное сближение, перемещается с постоянной скоростью из начала координат по оси OZ1 в положительном направлении.
Для практической реализации наведения в СННД необходимо формировать требуемый бортовой пеленг по правилу
а параметр рассогласования, определяющий сигнал управления, поступающий в САУ, по правилу
в котором φ - текущий бортовой пеленг.
Из (8) следует, что для практического применения скрытного наведения самолета в зонах резекции бортовой ИДРЛС противоборствующей стороны необходимо иметь измерения текущего бортового пеленга, выполняемого угломером.
Необходимо отметить, что эти измерения могут выполняться как в активном режиме работы бортовой РЛС наводимого самолета, так и в пассивном по излучению бортовой РЛС перехватываемой цели.
Как было отмечено ранее, помимо рассмотренных траекторий существуют симметричные им относительно горизонтальной координатной оси эллиптические скрытные траектории.
На фиг.6 в земной системе координат показаны две скрытные траектории из разных семейств, начинающиеся в одной точке, которые реализуют закон наведения. Общая начальная точка траекторий обозначена ромбом, а направления движения по траекториям из разных семейств указаны стрелками. При этом правая ветвь может быть использована для скрытного перехвата воздушной цели, а левая - для скрытного выхода из атаки.
На фиг.7 представлена упрощенная структурная схема возможного варианта системы скрытного наведения самолета с некогерентной РЛС на воздушную цель с ИДРЛС, реализующей предлагаемый способ наведения, где:
1 - антенная система БРЛС наводимого самолета;
2 - приемо-передающее устройство БРЛС;
3 - угломер БРЛС;
4 - вычислитель сигнала управления;
5 - система управления;
6 - наводимый самолет;
7 - дальномер БРЛС.
Принцип построения некогерентных БРЛС и их составных частей, а также их структурные схемы применительно к режимам прямого наведения подробно описаны в литературе [1, 2, 4]. Ниже при описании функционирования системы наведения структура БРЛС представлена в обобщенном виде. Предлагаемая система наведения может работать в двух режимах: активном и пассивном.
В активном режиме высокочастотный сигнал, формируемый в приемо-передающем устройстве 2, через антенную систему 1 излучается в направлении цели. Антенная система 1 БРЛС наводимого самолета осуществляет пространственную селекцию сигнала, отраженного от воздушной цели, который затем поступает на вход приемо-передающего устройства 2. В последнем происходит выделение и усиление сигнала, отраженного от цели. С выхода приемо-передающего устройства 2 сигнал поступает на вход угломера 3, где в общем случае формируются измерения бортового пеленга и угловой скорости линии визирования. Полученные измерения бортового пеленга цели поступают в вычислитель сигналов управления 4, формирующий параметр рассогласования (8). В системе управления 5 происходит преобразование сформированного сигнала управления (8) в соответствующие управляющие воздействия, которые поступают на управляющие органы наводимого самолета, предопределяя его движение по нормали к линии визирования (фиг.2 и 3), обеспечивающее его скрытное наведение в СННД.
При подлете к цели на расстояние Др+ΔД (фиг.6), где Др - дальность пуска ракеты, а ΔД - расстояние, пролетаемое наводимым самолетом за время подготовки ракеты к пуску, начинают формироваться для нее команды целеуказания по бортовому пеленгу, измеряемому в угломере, и дальности и скорости, измеряемых в дальномере 7 БРЛС.
Еще более скрытым способом наведения самолета на воздушную цель является использование пассивного режима работы БРЛС, в котором бортовой пеленг на цель определяется пассивным пеленгатором источника радиоизлучения на перехватываемом самолете. В такой ситуации измерения дальности и скорости сближения, необходимые для выдачи команд целеуказания средствам поражения, выполняются по известным правилам [5]. Один из вариантов траектории наводимого самолета, полученный в результате имитационного моделирования, показан на фиг.6.
Следует отметить, что предложенный способ наведения самолета на воздушные объекты существенно повышает безопасность наведения. В активном режиме работы БРЛС наводимого самолета его можно обнаружить лишь по факту ее излучения, без измерения дальности до него и скорости сближения с ним, что существенно снижает вероятность его поражения противоборствующей стороной. В пассивном режиме БРЛС наводимого самолета скрытность наведения становится практически стопроцентной.
Особенно эффективным этот способ является при наведении на авиационные комплексы радиолокационного дозора и наведения [6] противоборствующей стороны.
Техническим результатом изобретения является выполнение скрытного наведения самолетов на воздушные цели, как за счет полета в зонах доплеровской резекции РЛС противоборствующей стороны, так и за счет использования скрытного пассивного режима работы БРЛС наводимого самолета.
Решение поставленной задачи обеспечивается тем, что угломером измеряется текущий бортовой пеленг цели и по правилу (8) формируется параметр рассогласования, поступающий в САУ наводимого самолета, реализуя полет по скрытой траектории.
Сравнение траекторий полета, формируемых при использовании известного метода прямого наведения со скоростью VИП и предлагаемого скрытного метода со скоростью VИС, качественно проиллюстрировано на фиг.1 соответственно сплошной и штриховой линиями.
При этом необходимо подчеркнуть, что предлагаемый способ не накладывает на информационные системы наводимого самолета никаких нереализуемых ограничений.
ЛИТЕРАТУРА
1. Меркулов В.И., Канащенков А.И., Дрогалин В.В. и др. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2003. - 389 с.
2. Канащенков А.И., Меркулов В.И., Герасимов А.А. и др. Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2006. - 655 с.
3. Гандурин В.А., Кирсанов А.П. Особенности зоны обнаружения низколетящих воздушных объектов доплеровской радиолокационной станции // Радиотехника. - 2007. - №10.
4. Дудник П.И., Кондратенков Г.С., Татарский Б.Г., Ильчук А.Р., Герасимов А.А. Авиационные радиолокационные комплексы и системы / Под ред. П.И.Дудника. - М.: Изд. ВВИА им. проф. Н.Е.Жуковского, 2006. - 1111 с.
5. Дрогалин В.В., Меркулов В.И., Чернов В.С. и др. Определение координат и параметров движения источников радиоизлучения по угломерным данным в однопозиционных бортовых радиолокационных системах // Зарубежная радиоэлектроника. Успехи современной радиоэлектроники. - 2002. - №3.
6. Верба B.C. Авиационные комплексы радиолокационного дозора и наведения. - М.: Радиотехника, 2008. - 429 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ СКРЫТНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В ЗОНЕ ОБНАРУЖЕНИЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2017 |
|
RU2686802C1 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА С ПРОГНОЗОМ ПРОПАДАНИЯ ЦЕЛЕЙ В ЗОНАХ ДОПЛЕРОВСКОЙ РЕЗЕКЦИИ | 2009 |
|
RU2408030C2 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2004 |
|
RU2261411C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОТДЕЛЬНУЮ ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ ЦЕЛЕЙ | 2003 |
|
RU2253082C1 |
Изобретение относится к области приборостроения и может быть использовано в системах самонаведения летательных аппаратов. Технический результат - расширение функциональных возможностей. Для достижения данного результата траектория наводимого летательного аппарата все время находится в секторе невидимых направлений движения, размеры которого определяются зоной доплеровской резекции, в которой наводимый самолет не обнаруживается и не сопровождается. Скрытное самонаведение может выполняться как в активном, так и пассивном режимах работы наводимого самолета. При активном режиме работы самолет одновременно измеряет бортовой пеленг, угловую скорость линии визирования, дальность до цели и скорость сближения с ней, на основе обработки которых определяют параметр рассогласования по заданному закону. 7 ил.
Способ скрытного самонаведения летательного аппарата на воздушные объекты, оснащенные бортовыми импульсно-доплеровскими радиолокационными системами (БРЛС), заключающийся в том, что БРЛС наводимого летательного аппарата в активном или пассивном режимах работы осуществляет пространственную селекцию сигнала, отраженного от цели, формирует измерения бортового пеленга и угловой скорости линии визирования, формирует параметр рассогласования с линией визирования цели и осуществляет формирование управляющего воздействия на управляющие органы наводимого летательного аппарата, при этом траектория сближения наводимого летательного аппарата с целью находится в зоне доплеровской резекции, для чего требуемый бортовой пеленг (φТ) формируют по правилу φТ=90°, а сигнал управления траекторией полета определяется как Δ=φ-90°, в котором φ - текущий бортовой пеленг в плоскости управления.
| МЕРКУЛОВ В.И., ДРОГАЛИН В.В., КАНАЩЕНКОВ А.И | |||
| и др | |||
| Авиационные системы радиоуправления | |||
| Радиоэлектронные системы самонаведения | |||
| / Под ред | |||
| А.И.Канащенкова и В.И.Меркулова | |||
| - М.: Радиотехника, 2003, т.2, с.15-22 | |||
| МЕРКУЛОВ В.И., ДРОГАЛИН В.В., КАНАЩЕНКОВ А.И | |||
| и др | |||
| Авиационные системы радиоуправления | |||
| Принципы построения систем радиоуправления. |

