1. Область техники
Настоящее изобретение относится к технической области управления транспортным средством, в частности к системе, способу и устройству управления подъемом горнодобывающей машины и горнодобывающей машине.
2. Уровень техники
В связи с растущим спросом на крупномасштабные шахтные производственные мощности традиционные карьерные самосвалы продолжают развиваться в направлении увеличения грузоподъемности, объема и мощности; однако по мере увеличения грузоподъемности карьерных самосвалов требования к характеристикам транспортных средств продолжают возрастать, и в целях защиты горнодобывающих машин при проведении грузоподъемных работ необходимо осуществлять контроль защиты при подъеме на горнодобывающей машине.
Традиционный подъем на горнодобывающих машинах осуществляется с помощью ограничителя подъемной системы, обеспечивающего предельное управление подъемной системой, однако ограничитель подъема может только дать команду гидравлическому механизму прекратить подъем после подъема на вершину или прекратить спуск после спуска на дно. Такой способ управления приведет к быстрому опусканию грузового контейнера, что приведет к большой силе удара между грузовым контейнером и рамой, а удар может повредить гидравлические компоненты горнодобывающей машины.
CN213292422U относится к системе рулевого управления подземного скрепера, относящегося к области подземного скрепера. Система содержит блок управления транспортным средством, рулевой рычаг, первый выходной модуль, второй выходной модуль, коммутационный модуль и гидравлическую систему рулевого управления; рулевой рычаг, первый выходной модуль и второй выходной модуль находятся в коммуникационном соединении с контроллером транспортного средства в целом; и первый выходной модуль и второй выходной модуль находятся в коммуникационном соединении с рулевым пропорциональным электромагнитным клапаном в гидравлической системе рулевого управления через коммутационный модуль. Система реализует двухлинейное рулевое управление подземным скрепером, один выходной модуль используется для рулевого управления подземным скрепером, когда скрепер поворачивается, другой выходной модуль используется в качестве кандидата на рулевое управление скрепера, и, следовательно, несчастные случаи, вызванные отказом системы рулевого управления, эффективно сокращаются, повреждение подземного скрепера предотвращается, и безопасность водителя обеспечивается.
CN112340607A относится к электрической системе управления и способу управления для крана. Система содержит: подъемный механизм, содержащий механизм тележки, механизм троллейной тележки, подъемный механизм и механизм управления, соответственно соединенные с механизмом тележки, механизмом троллейной тележки и подъемным механизмом; механизм тележки содержит: тележку, содержащую корпус тележки и приводное устройство тележки, корпус тележки содержит две концевые балки, которые соответственно расположены с левой и правой стороны, две главные балки, которые расположены с интервалами и параллельно, соединены между двумя концевыми балками, дорожка для движения механизма троллейной тележки расположена с внутренней стороны каждой главной балки, а приводное устройство тележки используется для приведения в действие двух концевых балок для перемещения вперед и назад по направляющим рельсам тележки; механизм троллейной тележки содержит: троллейную тележку, содержащую корпус троллейной тележки и приводное устройство троллейной тележки; Конструкция подъемной машины содержит: троллейную тележку, намоточный барабан, стальной трос, подъемный крюк и подъемное приводное устройство, при этом намоточный барабан расположен на корпусе троллейной тележки, стальной трос намотан на наружной стороне намоточного барабана, а подъемный крюк расположен на свободном конце стального троса; механизм управления соответственно соединен с приводным устройством тележки, приводным устройством троллейной тележки и подъемным приводным устройством посредством связи.
Сущность изобретения
Настоящее изобретение направлено на решение, по меньшей мере, одной из технических проблем, существующих в известном уровне техники или связанной с ним технологии.
Для решения этих проблем в настоящем изобретении предлагаются система, способ и устройство управления подъемом горнодобывающей машины и горнодобывающая машина, которые позволят уменьшить удар между грузовым контейнером и рамой транспортного средства и продлить срок службы гидравлических компонентов.
Согласно первому объекту изобретения система управления подъемом горнодобывающей машины содержит контроллер, а также подключенную к грузовому контейнеру цепь электромагнитного клапана подъема, цепь электромагнитного клапана опускания и цепь плавающего электромагнитного клапана; при этом
контроллер подключен к цепи электромагнитного клапана подъема, цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана соответственно;
контроллер выполнен с возможностью управления включением цепи электромагнитного клапана подъема после получения сигнальной команды подъема, цепь электромагнитного клапана подъема выполнена с возможностью подъема грузового контейнера из первого текущего положения в первое заданное положение во включенном состоянии; контроллер выполнен с возможностью управления включением цепи электромагнитного клапана опускания и/или цепи плавающего электромагнитного клапана после получения сигнальной команды опускания, причем цепь электромагнитного клапана опускания выполнена с возможностью опускания грузового контейнера из второго текущего положения во второе заданное положение во включенном состоянии, а цепь плавающего электромагнитного клапана выполнена с возможностью опускания грузового контейнера из второго заданного положения в третье заданное положение во включенном состоянии или опускания грузового контейнера из второго текущего положения в третье заданное положение во включенном состоянии;
при этом первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером, третье заданное положение – это самое нижнее вертикальное положение, установленное грузовым контейнером, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
Способ управления подъемом горнодобывающей машины согласно второму объекту настоящего изобретения, применяемый к системе управления подъемом любой горнодобывающей машины в первом объекте, содержащий:
прием сигнальной команды для управления вертикальным перемещением контейнера, причем сигнальная команда представляет собой любую из сигнальной команды подъема, первой сигнальной команды опускания и второй сигнальной команды опускания;
управление цепью электромагнитного клапана подъема для получения питания при получении сигнальной команды подъема, в результате чего во включенном состоянии грузовой контейнер поднимается из первого текущего положения в первое заданное положение;
последовательное включение цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана при получении первой сигнальной команды опускания, таким образом, что, когда цепь электромагнитного клапана опускания находится во включенном состоянии, грузовой контейнер опускается из второго текущего положения во второе заданное положение, а когда цепь плавающего электромагнитного клапана находится во включенном состоянии, грузовой контейнер опускается из второго заданного положения в третье заданное положение;
управление цепью плавающего электромагнитного клапана для включения питания при получении второй сигнальной команды опускания, таким образом, что цепь плавающего электромагнитного клапана находится во включенном состоянии, а грузовой контейнер опускается из второго текущего положения в третье заданное положение;
при этом первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером, третье заданное положение – это самое нижнее вертикальное положение, установленное грузовым контейнером, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
Устройство управления подъемом горнодобывающей машины согласно третьему объекту настоящего изобретения, применяемое к системе управления подъемом любой горнодобывающей машины в первом объекте содержит:
приемный модуль, осуществляющий прием сигнальной команды для управления вертикальным перемещением контейнера, причем сигнальная команда представляет собой любую из сигнальной команды подъема, первой сигнальной команды опускания и второй сигнальной команды опускания;
модуль управления, выполненный с возможностью управления цепью электромагнитного клапана подъема для получения питания при получении сигнальной команды подъема, в результате чего во включенном состоянии грузовой контейнер поднимается из первого текущего положения в первое заданное положение;
модуль управления дополнительно выполнен с возможностью последовательного включения цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана при получении первой сигнальной команды опускания, таким образом, что, когда цепь электромагнитного клапана опускания находится во включенном состоянии, грузовой контейнер опускается из второго текущего положения во второе заданное положение, а когда цепь плавающего электромагнитного клапана находится во включенном состоянии, грузовой контейнер опускается из второго заданного положения в третье заданное положение;
модуль управления дополнительно выполнен с возможностью управления цепью плавающего электромагнитного клапана для включения питания при получении второй сигнальной команды опускания, таким образом, что цепь плавающего электромагнитного клапана находится во включенном состоянии, а грузовой контейнер опускается из второго текущего положения в третье заданное положение;
при этом первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером, третье заданное положение – это самое нижнее вертикальное положение, установленное грузовым контейнером, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
Горнодобывающая машина согласно четвертому объекту настоящего изобретения содержит систему управления подъемом горнодобывающей машины согласно первому объекту.
Электронное оборудование согласно пятому объекту настоящего изобретения содержит процессор и память, причем память используется для хранения компьютерных программ, а процессор используется для вызова и запуска компьютерной программы, хранящейся в памяти, и выполнения способа согласно второму объекту или его соответствующих реализаций.
Машиночитаемый носитель информации согласно шестому объекту настоящего изобретения предназначен для хранения компьютерных программ, причем компьютерная программа заставляет компьютер выполнять способ, описанный во втором объекте, или его соответствующие реализации.
Благодаря техническому решению, предусмотренному настоящим изобретением, контроллер выполнен с возможностью управления включением и выключением цепи электромагнитного клапана подъема, цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана в соответствии с сигнальными командами, тем самым реализуя интеллектуальное управление подъемом или опусканием грузового контейнера. В процессе управления опусканием грузового контейнера, когда определяется, что грузовой контейнер скоро достигнет установленного нижнего вертикального положения, используется цепь плавающего электромагнитного клапана для управления медленным опусканием грузового контейнера на раму, с опорой только на собственную силу тяжести. Этот плавающий процесс позволяет эффективно уменьшить силу удара между грузовым контейнером и рамой, тем самым продлевая срок службы гидравлических компонентов.
Следует понимать, что приведенное выше общее описание и подробное описание, приведенное ниже, являются лишь примерными и пояснительными и не могут ограничивать настоящее изобретение. Другие признаки и преимущества настоящего изобретения будут подробно описаны в следующем разделе, посвященном конкретным способам осуществления.
Описание прилагаемых чертежей
Чтобы более ясно объяснить технические решения в примерах осуществления настоящего изобретения, ниже будут кратко представлены прилагаемые чертежи, которые необходимо использовать в описании примеров осуществления. Очевидно, что прилагаемые чертежи в последующем описании представляют собой лишь некоторые примеры осуществления настоящего изобретения, и для специалистов в данной технической области другие прилагаемые чертежи могут быть получены на основе этих прилагаемых чертежей без приложения творческих усилий.
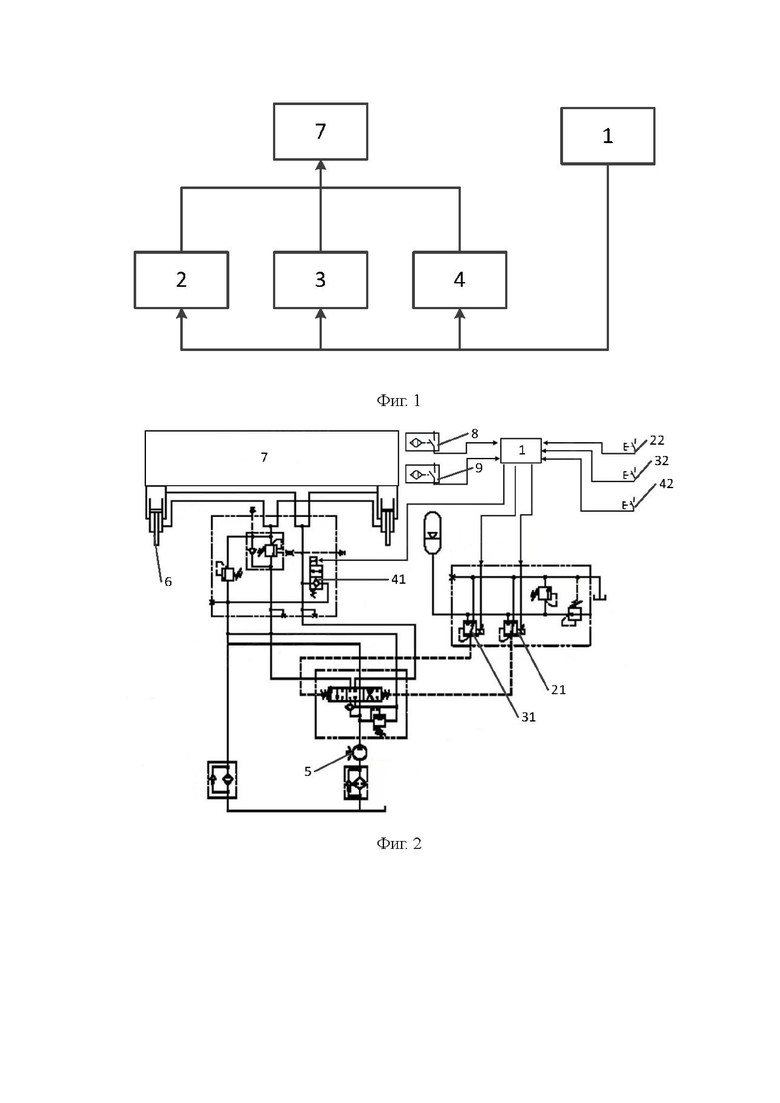
На фиг. 1 показано схематическое изображение системной архитектуры системы управления подъемом горнодобывающей машины, предусмотренной примером осуществления настоящего изобретения;
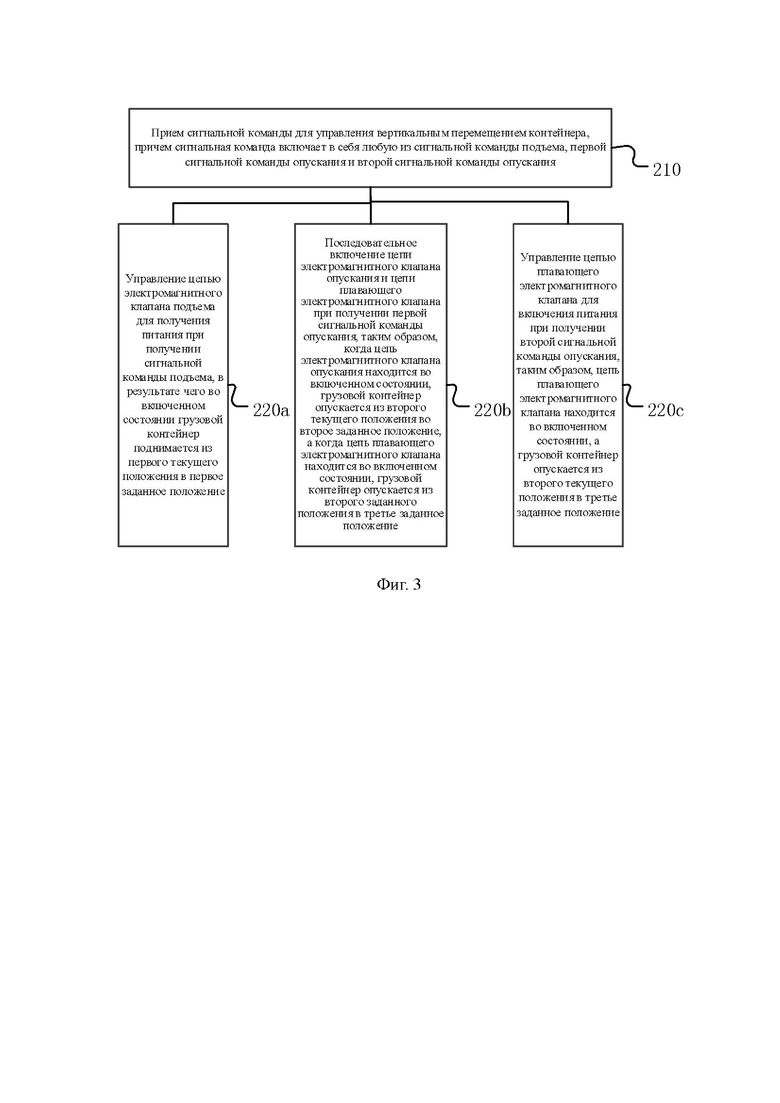
на фиг. 2 показано схематическое изображение конструкции системы управления подъемом горнодобывающей машины, предусмотренной примером осуществления настоящего изобретения;
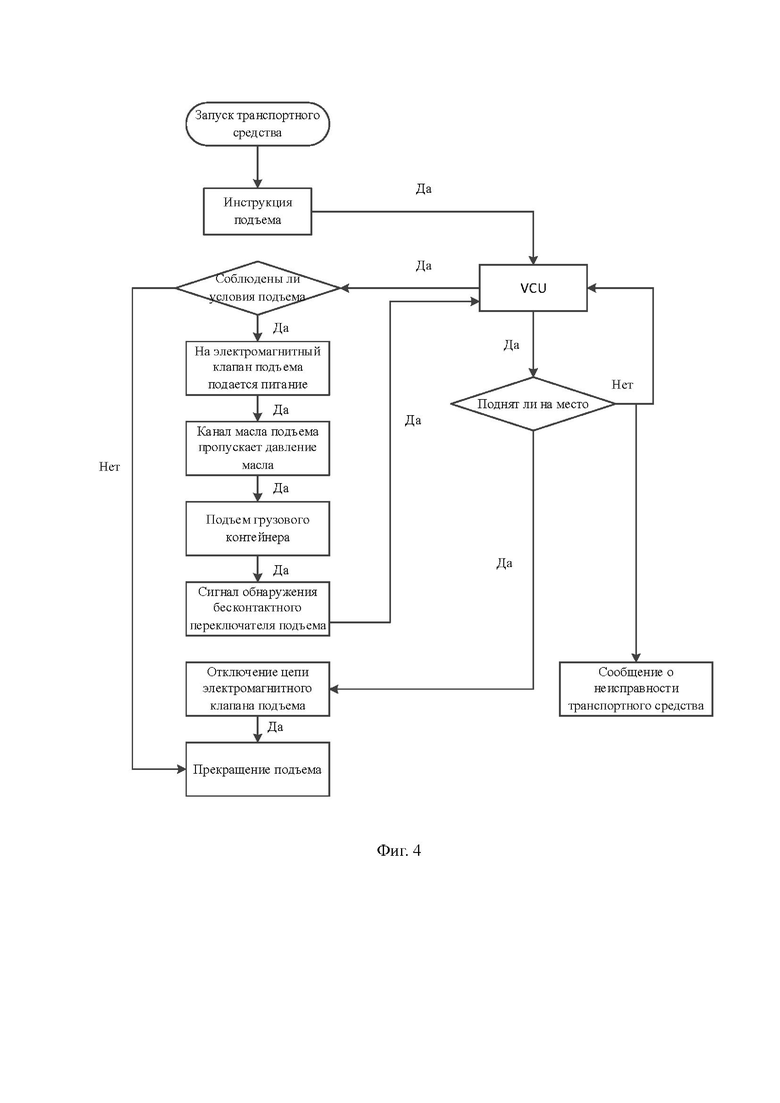
на фиг. 3 показано схематическое изображение процесса способа управления подъемом горнодобывающей машины согласно примеру осуществления настоящего изобретения;
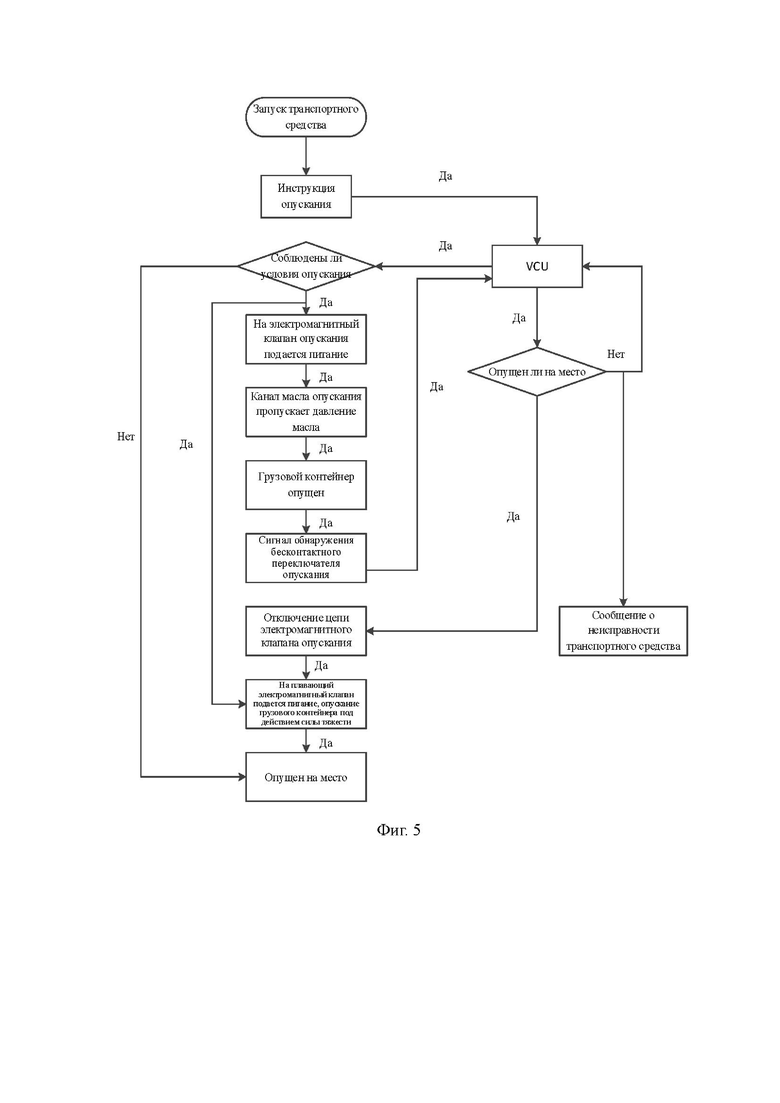
на фиг. 4 показано схематическое изображение процесса подъема грузового контейнера согласно примеру осуществления настоящего изобретения;
на фиг. 5 показано схематическое изображение процесса опускания грузового контейнера согласно примеру осуществления настоящего изобретения;
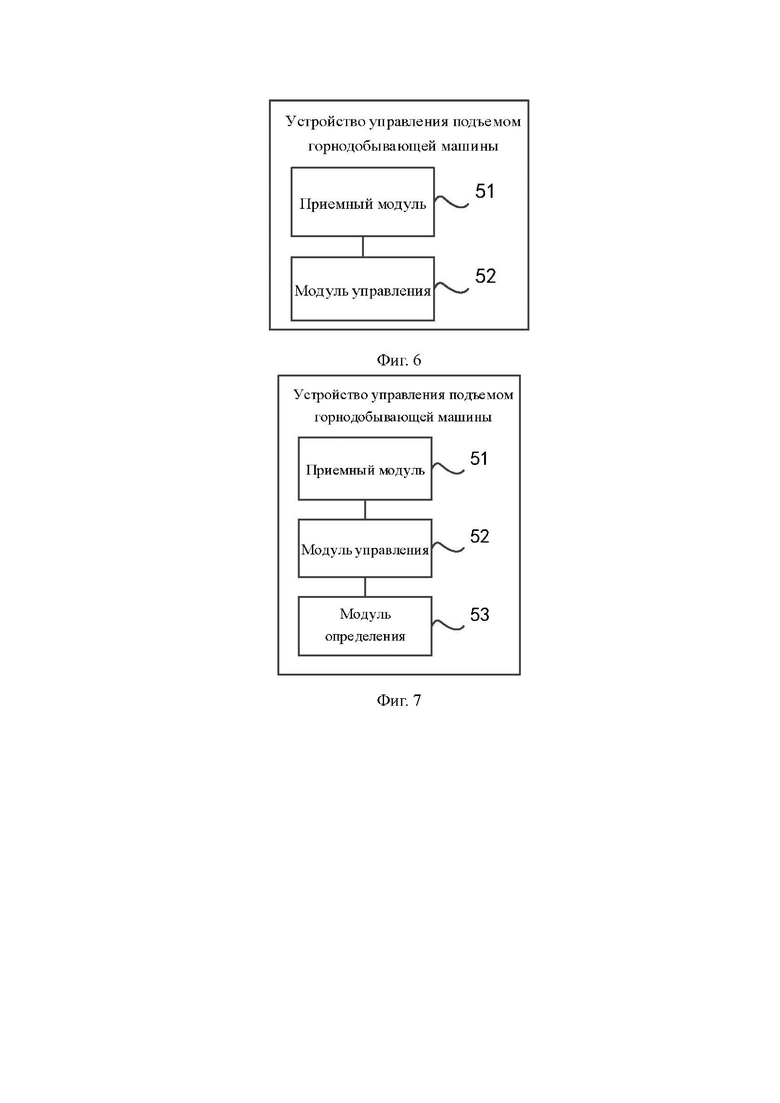
на фиг. 6 показано схематическое изображение конструкции устройства управления подъемом горнодобывающей машины согласно примеру осуществления настоящего изобретения;
на фиг. 7 показано схематическое изображение конструкции устройства управления подъемом горнодобывающей машины согласно другому примеру осуществления настоящего изобретения;
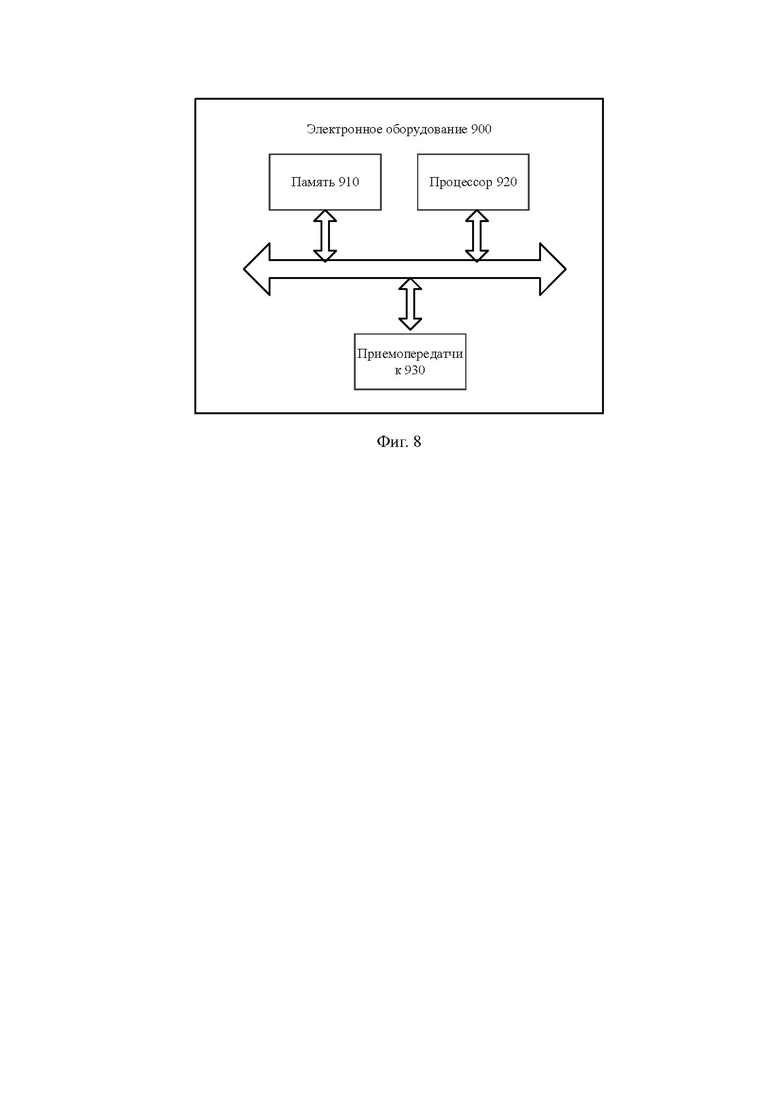
на фиг. 8 показано схематическое изображение конструкции электронного оборудования согласно примеру осуществления настоящего изобретения.
На чертежах:
1 - контроллер;
2 - цепь электромагнитного клапана подъема, 21 - электромагнитный клапан подъема, 22 - кнопочный переключатель подъема;
3 - цепь электромагнитного клапана опускания, 31 - электромагнитный клапан опускания, 32 - кнопочный переключатель опускания;
4 - цепь плавающего электромагнитного клапана, 41 - плавающий электромагнитный клапан, 42 - плавающий кнопочный переключатель;
5 - шестеренчатый насос;
6 - гидроцилиндр;
7 - грузовой контейнер;
8 - бесконтактный переключатель подъема;
9 - бесконтактный переключатель опускания;
51 - приемный модуль, 52 - модуль управления; 53 - модуль определения;
900 - электронное оборудование, 910 - память, 920 - процессор, 930 - приемопередатчик.
Конкретные примеры осуществления
Технические решения в примерах осуществления настоящего изобретения будут ясно и полностью описаны ниже со ссылкой на прилагаемые чертежи в примерах осуществления настоящего изобретения. Очевидно, что описанные примеры осуществления представляют собой лишь некоторые из примеров осуществления настоящего изобретения, а не все варианты осуществления. На основании примеров осуществления настоящего изобретения все другие примеры осуществления, полученные специалистами в данной технической области без какой-либо творческой работы, подпадают под объем охраны настоящего изобретения.
Следует отметить, что термины «первый», «второй» и т. д. в описании и формуле настоящего изобретения и на упомянутых прилагаемых чертежах используются для различения подобных объектов и не обязательно используются для описания конкретного порядка или последовательности. Следует понимать, что данные, используемые таким образом, могут быть взаимозаменяемы при соответствующих обстоятельствах, таким образом, описанные здесь примеры осуществления настоящего изобретения могут быть реализованы в порядке, отличном от проиллюстрированного или описанного здесь. Кроме того, термины «содержать» и «иметь» и любые их варианты предназначены для обозначения неисключительного включения, например, процесс, метод, система, продукт или сервер, состоящий из последовательности шагов или блоков, не обязательно должен ограничиваться теми шагами или блоками, которые явно перечислены, скорее, могут быть включены другие этапы или элементы, явно не перечисленные или не присущие процессам, методам, продуктам или устройствам.
Традиционный подъем на горнодобывающих машинах осуществляется с помощью ограничителя подъемной системы, обеспечивающего предельное управление подъемной системой, однако ограничитель подъема может только дать команду гидравлическому механизму прекратить подъем после подъема на вершину или прекратить спуск после спуска на дно. Такой способ управления приведет к быстрому опусканию грузового контейнера, что приведет к большой силе удара между грузовым контейнером и рамой, а удар может повредить гидравлические компоненты горнодобывающей машины.
Для решения вышеуказанных технических проблем изобретательская концепция настоящего изобретения заключается в следующем: контроллер выполнен с возможностью управления включением и выключением цепи электромагнитного клапана подъема, цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана в соответствии с сигнальными командами, тем самым реализуя интеллектуальное управление подъемом или опусканием грузового контейнера. В процессе управления опусканием грузового контейнера, когда определяется, что грузовой контейнер скоро достигнет установленного нижнего вертикального положения, используется цепь плавающего электромагнитного клапана для управления медленным опусканием грузового контейнера на раму, с опорой только на собственную силу тяжести. Этот плавающий процесс позволяет эффективно уменьшить силу удара между грузовым контейнером и рамой, тем самым продлевая срок службы гидравлических компонентов.
Следующая комбинация фиг. 1 и 2 описывает систему управления подъемом горнодобывающей машины в соответствии с некоторыми примерами осуществления настоящего изобретения.
Как показано на фиг. 1, система управления подъемом горнодобывающей машины, предусмотренная примером осуществления настоящего изобретения, содержит: контроллер 1, например, контроллер транспортного средства (Vehicle Control Unit, VCU), и цепь 2 электромагнитного клапана подъема, цепь 3 электромагнитного клапана опускания и цепь 4 плавающего электромагнитного клапана, подключенные к грузовому контейнеру 7; контроллер 1 подключен к цепи 2 электромагнитного клапана подъема, цепи 3 электромагнитного клапана опускания и цепи 4 плавающего электромагнитного клапана соответственно; контроллер 1 выполнен с возможностью управления включением цепи 2 электромагнитного клапана подъема после получения сигнальной команды подъема, цепь 2 электромагнитного клапана подъема выполнена с возможностью подъема грузового контейнера 7 из первого текущего положения в первое заданное положение во включенном состоянии; контроллер 1 выполнен с возможностью управления включением цепи 3 электромагнитного клапана опускания и/или цепи 4 плавающего электромагнитного клапана после получения сигнальной команды опускания, причем цепь 3 электромагнитного клапана опускания выполнена с возможностью опускания грузового контейнера 7 из второго текущего положения во второе заданное положение во включенном состоянии, а цепь 4 плавающего электромагнитного клапана выполнена с возможностью опускания грузового контейнера 7 из второго заданного положения в третье заданное положение во включенном состоянии или опускания грузового контейнера 7 из второго текущего положения в третье заданное положение во включенном состоянии; при этом первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером 7, третье заданное положение – это самое нижнее вертикальное положение, установленное грузовым контейнером 7, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
Соответственно, как показано на фиг. 2, схема 2 электромагнитного клапана подъема содержит электромагнитный клапан 21 подъема, шестеренчатый насос 5 и гидроцилиндр 6; контроллер 1 соединен с электромагнитным клапаном 21 подъема, а электромагнитный клапан 21 подъема соединен с гидроцилиндром 6 через шестеренчатый насос 5, причем гидроцилиндр 6 подключен к нижней части грузового контейнера 7. Контроллер 1 выполнен с возможностью определения того, выполняются ли условия подъема после получения сигнальной команды подъема. Если определено, что условия подъема соблюдены, осуществляется управление электромагнитным клапаном 21 подъема для включения питания, в результате чего электромагнитный клапан 21 подъема после включения питания передает давление масла через шестеренчатый насос 5 в подъемную масляную камеру гидроцилиндра 6, который под действием давления масла поднимает грузовой контейнер 7 из первого текущего положения в первое заданное положение.
Соответственно, как показано на фиг. 2, цепь 3 электромагнитного клапана опускания содержит электромагнитный клапан 31 опускания, шестеренчатый насос 5 и гидроцилиндр 6, цепь 4 плавающего электромагнитного клапана содержит плавающий электромагнитный клапан 41 и гидроцилиндр 6, а сигнальная команда опускания содержит первую сигнальную команду опускания и вторую сигнальную команду опускания; контроллер 1 соединен с электромагнитным клапаном 31 опускания и плавающим электромагнитным клапаном 41 соответственно, электромагнитный клапан 31 опускания соединен с гидроцилиндром 6 через шестеренчатый насос 5, плавающий электромагнитный клапан 41 соединен с гидроцилиндром 6, а гидроцилиндр 6 подключен к нижней части грузового контейнера 7; контроллер 1 выполнен с возможностью определения того, выполняются ли условия подъема после получения первой сигнальной команды опускания. Когда будет определено, что условия опускания выполнены, осуществляется управление электромагнитным клапаном 31 опускания для включения питания, в результате чего электромагнитный клапан 31 опускания после включения питания используется для передачи давления масла через шестеренчатый насос 5 в опускающуюся масляную камеру гидроцилиндра 6, который под действием давления масла опускает грузовой контейнер 7 из второго текущего положения во второе заданное положение; кроме того, контроллер 1 дополнительно выполнен с возможностью выключения электромагнитного клапана 31 опускания после определения того, что грузовой контейнер 7 опустился во второе заданное положение, и управления плавающим электромагнитным клапаном 41 для включения питания, в результате чего плавающий электромагнитный клапан 41 после включения питания управляет опусканием грузового контейнера 7 из второго заданного положения в третье заданное положение под действием силы тяжести; контроллер 1дополнительно выполнен с возможностью определения того, выполняется ли условие спуска, после приема второй сигнальной команды опускания. Когда определяется, что условие опускания выполнено, осуществляется управление плавающим электромагнитным клапаном 41 для включения питания, и таким образом, плавающий электромагнитный клапан 41 после включения питания управляет опусканием грузового контейнера 7 из второго текущего положения в третье заданное положение под действием силы тяжести.
В конкретном сценарии применения контроллер 1 может управлять подъемом или опусканием грузового контейнера 7 в ответ на сигнальные команды. При этом, в качестве возможного способа осуществления, сигнальная команда может быть активно отправлена транспортным средством на контроллер 1, когда выполняются определенные условия работы; в качестве другого возможного способа осуществления можно также инициировать загрузку сигнальных команд вручную, например, оператор загружает различные сигнальные команды в контроллер 1 с помощью рычагов управления, кнопочных переключателей и т. д.
Соответственно, как показано на фиг. 2, система управления подъемом горнодобывающей машины дополнительно содержит: кнопочный переключатель 22 подъема, кнопочный переключатель 32 опускания и плавающий кнопочный переключатель 42, соответственно подключенные к контроллеру 1, причем кнопочный переключатель 22 подъема используется для отправки сигнальной команды подъема на контроллер 1, кнопочный переключатель 32 опускания используется для отправки первой сигнальной команды опускания на контроллер 1, а плавающий кнопочный переключатель 42 используется для отправки второй сигнальной команды опускания на контроллер 1.
В конкретном сценарии применения, чтобы добиться точного управления положениями подъема и опускания грузового контейнера 7, на транспортном средстве может быть установлен бесконтактный переключатель, причем бесконтактный переключатель может отправлять различные сигналы обнаружения на контроллер 1 в зависимости от относительного положения грузового контейнера 7, то есть сигнал обнаружения используется для отражения положения перемещения грузового контейнера 7 в реальном времени. Как показано на фиг. 2, система управления подъемом горнодобывающих машин дополнительно содержит: бесконтактный переключатель 8 подъема и бесконтактный переключатель 9 опускания, причем бесконтактный переключатель 8 подъема устанавливается в первое заданное положение, а бесконтактный переключатель 9 опускания устанавливается во второе заданное положение; бесконтактный переключатель 8 подъема подключен к контроллеру 1и используется для отправки сигнала обнаружения подъема грузового контейнера 7 на контроллер 1, при этом, когда бесконтактный переключатель 8 подъема обнаруживает, что нижняя часть грузового контейнера 7 близка к первому заданному положению, он отправляет первый сигнал обнаружения подъема высокого уровня на контроллер 1, а когда бесконтактный переключатель 8 подъема не обнаруживает нижнюю часть грузового контейнера 7, он отправляет второй сигнал обнаружения подъема низкого уровня на контроллер 1. Бесконтактный переключатель 9 опускания подключен к контроллеру 1и используется для отправки сигнала обнаружения опускания грузового контейнера 7 на контроллер 1, при этом, когда бесконтактный переключатель 9 опускания обнаруживает, что нижняя часть грузового контейнера 7 близка ко второму заданному положению, он отправляет первый сигнал обнаружения опускания низкого уровня на контроллер 1, а когда нижняя часть грузового контейнера 7 не обнаружена, бесконтактный переключатель 9 опускания посылает второй сигнал обнаружения опускания высокого уровня на контроллер 1.
Соответственно, для системы управления подъемом горнодобывающей машины, показанной на фиг. 2, при управлении подъемом грузового контейнера 7 полные этапы осуществления могут быть следующими: при манипулировании кнопочным переключателем 22 подъема на контроллер 1 подается сигнальная команда на подъем, после получения которой контроллер 1 определяет, соблюдены ли условия подъема, и на основе сигнала обнаружения подъема, посылаемого бесконтактным переключателем 8 подъема, когда определяется, что условия подъема выполнены, контроллер 1 подает питание на электромагнитный клапан 21 подъема, в результате чего электромагнитный клапан 21 подъема после включения питания передает давление масла через шестеренчатый насос 5 в подъемную масляную камеру гидроцилиндра 6, а гидроцилиндр 6 поднимает грузовой контейнер 7 из первого текущего положения в первое заданное положение под действием давления масла. При подъеме грузового контейнера 7 из первого текущего положения в первое заданное положение контроллер 1 может также принимать сигнал обнаружения подъема в режиме реального времени и определять, достигает ли грузовой контейнер 7 первого заданного положения, на основании сигнала обнаружения подъема. Когда определено, что грузовой контейнер 7 достиг первого заданного положения, цепь 2 электромагнитного клапана подъема отключается, то есть электромагнитный клапан 21 подъема отключается, чтобы остановить подъем грузового контейнера 7.
Соответственно, для системы управления подъемом горнодобывающей машины, показанной на фиг. 2, при управлении опусканием грузового контейнера 7 возможным этапом осуществления может быть следующее: первая сигнальная команда опускания отправляется на контроллер 1 посредством кнопочного переключателя 32 опускания, после приема первой сигнальной команды опускания контроллер 1 определяет, выполняется ли условие опускания, на основе сигнала обнаружения опускания, отправленного бесконтактным переключателем 9 опускания. Когда определяется, что опускание выполнено, контроллер 1 осуществляет управление электромагнитным клапаном 31 опускания для включения питания, таким образом, электромагнитный клапан 31 опускания после включения питания передает давление масла в опускающуюся масляную камеру гидроцилиндра 6 через шестеренчатый насос 5, а гидроцилиндр 6 опускает грузовой контейнер 7 из второго текущего положения во второе заданное положение под действием давления масла; кроме того, контроллер 1 дополнительно выполнен с возможностью выключения электромагнитного клапана 31 опускания после определения того, что грузовой контейнер 7 опустился во второе заданное положение, и управления плавающим электромагнитным клапаном 41 для включения питания. Таким образом, плавающий электромагнитный клапан 41 после включения питания управляет грузовым контейнером 7, чтобы он опустился из второго заданного положения в третье заданное положение под действием силы тяжести. Когда грузовой контейнер 7 опускается из первого текущего положения во второе заданное положение, контроллер 1 может также принимать сигнал обнаружения опускания в режиме реального времени и определять, достиг ли грузовой контейнер 7 второго заданного положения, на основе сигнала обнаружения опускания. Когда определено, что грузовой контейнер 7 достиг второго заданного положения, цепь 3 электромагнитного клапана опускания выключается, и осуществляется управление цепью 4 плавающего электромагнитного клапана для включения питания, то есть, электромагнитный клапан 31 опускания отключается, а плавающий электромагнитный клапан 41 включается, чтобы остановить управление опусканием грузового контейнера 7 Таким образом, грузовой контейнер 7, опираясь на собственную силу тяжести, медленно опускается в третье заданное положение. При управлении опусканием грузового контейнера 7 процесс опускания можно разделить на два этапа. На первом этапе используется метод механического опускания, который позволяет обеспечить эффективность опускания грузового контейнера 7 и стабильный ход работы. В следующем этапе используется метод плавающего опускания, в котором грузовой контейнер 7 медленно опускается к раме только за счет собственной силы тяжести. Этот плавающий процесс позволяет эффективно уменьшить силу удара между грузовым контейнером и рамой, тем самым продлевая срок службы гидравлических компонентов.
Соответственно, для системы управления подъемом горнодобывающей машины, показанной на фиг. 2, при управлении спуском грузового контейнера 7 другим возможным этапом осуществления может быть следующее: вторая сигнальная команда опускания отправляется на контроллер 1 через плавающий кнопочный переключатель 42. После приема второй сигнальной команды опускания контроллер 1 определяет, выполняется ли условие опускания, на основе сигнала обнаружения опускания, отправленного бесконтактным переключателем 9 опускания. Когда определяется, что опускание выполнено, осуществляется управление контроллером 1 для включения питания на плавающий электромагнитный клапан 41. Таким образом, плавающий электромагнитный клапан 41 после включения питания управляет грузовым контейнером 7, чтобы он опустился из второго текущего положения в третье заданное положение под действием силы тяжести. При управлении опусканием грузового контейнера 7 также может напрямую быть выбрано неактивное опускание, то есть плавающий спуск грузового контейнера 7, при котором грузовой контейнер 7 медленно опускается на раму только за счет собственной силы тяжести. Этот плавающий процесс позволяет эффективно снизить силу удара грузового контейнера и рамы, что, в свою очередь, может продлить срок службы гидравлических компонентов.
Таким образом, в системе управления подъемом горнодобывающей машины, предусмотренной настоящим изобретением, контроллер выполнен с возможностью управления включением и выключением цепи электромагнитного клапана подъема, цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана в соответствии с сигнальными командами, тем самым реализуя интеллектуальное управление подъемом или опусканием грузового контейнера. В процессе управления опусканием грузового контейнера, когда определяется, что грузовой контейнер скоро достигнет установленного нижнего вертикального положения, используется цепь плавающего электромагнитного клапана для управления медленным опусканием грузового контейнера на раму, с опорой только на собственную силу тяжести. Этот плавающий процесс позволяет эффективно уменьшить силу удара между грузовым контейнером и рамой, тем самым продлевая срок службы гидравлических компонентов.
На основе упомянутой выше системы управления подъемом горнодобывающей машины настоящее изобретение предлагает способ управления подъемом горнодобывающей машины, который может выполняться контроллером 1 в системе управления подъемом горнодобывающей машины(см. фиг. 3). Способ может содержать следующие этапы:
этап 210 - прием сигнальной команды для управления вертикальным перемещением контейнера, причем сигнальная команда представляет собой любую из сигнальной команды подъема, первой сигнальной команды опускания и второй сигнальной команды опускания.
В конкретном сценарии применения контроллер 1 может управлять подъемом или опусканием грузового контейнера 7 в ответ на сигнальные команды. При этом, в качестве возможного способа осуществления, сигнальная команда может быть активно отправлена транспортным средством на контроллер 1, когда выполняются определенные условия работы; в качестве другого возможного способа осуществления можно также инициировать загрузку сигнальных команд вручную, например, оператор загружает различные сигнальные команды в контроллер 1 с помощью рычагов управления, кнопочных переключателей и т. д.
В примере осуществления этого изобретения на примере оператора, загружающего различные сигнальные команды в контроллер 1 с помощью кнопочных переключателей и т. п., будет описано техническое решение в настоящем изобретении, но оно не представляет собой конкретного ограничения. Соответственно, кнопочные переключатели могут включать в себя кнопочный переключатель 22 подъема, кнопочный переключатель 32 опускания и плавающий кнопочный переключатель 42. Соответственно, контроллер 1 может принимать сигнальную команду подъема, посылаемую кнопочным переключателем 22 подъема, и сигнальная команда подъема используется для подачи команды на управление подъемом грузового контейнера 7. Контроллер 1 также может принимать первую сигнальную команду опускания, отправленную кнопочным переключателем 32 опускания, и первая сигнальная команда опускания используется для подачи команды на управление опусканием грузового контейнера 7, причем при управлении опусканием применяется двухступенчатое управление, на первой ступени которого используется режим принудительного опускания, управляемый цепью 3 электромагнитного клапана опускания, а на следующей ступени используется метод гравитационного плавающего опускания, приводимый в действие цепью плавающего электромагнитного клапана 4. Контроллер 1 также может принимать вторую сигнальную команду опускания, отправленную плавающим кнопочным переключателем 42; вторая сигнальная команда опускания используется для подачи команды на управление опусканием грузового контейнера 7, а метод гравитационного плавающего опускания, приводимый в действие цепью плавающего электромагнитного клапана 4, применяется на протяжении всего управления опусканием.
Этап 220a - управление цепью электромагнитного клапана подъема для получения питания при получении сигнальной команды подъема, в результате чего во включенном состоянии грузовой контейнер поднимается из первого текущего положения в первое заданное положение.
Как показано на фиг. 2, цепь 2 электромагнитного клапана подъема содержит электромагнитный клапан 21 подъема, шестеренчатый насос 5 и гидроцилиндр 6. Соответственно, для примера осуществления настоящего изобретения этапы примера осуществления могут содержать следующее: управление электромагнитным клапаном подъема в цепи электромагнитного клапана подъема для включения питания, когда определяется, что сигнальная команда подъема получена и условия подъема выполнены, в результате чего электромагнитный клапан подъема после включения питания передает через шестеренчатый насос давление масла в подъемную масляную камеру гидроцилиндра, а гидроцилиндр под действием давления масла поднимает грузовой контейнер из первого текущего положения в первое заданное положение.
В конкретном сценарии применения, чтобы добиться точного управления положениями подъема и опускания грузового контейнера 7, на транспортном средстве может быть установлен бесконтактный переключатель, причем бесконтактный переключатель может отправлять различные сигналы обнаружения на контроллер 1 в зависимости от относительного положения грузового контейнера 7, то есть сигнал обнаружения используется для отражения положения перемещения грузового контейнера 7 в реальном времени. Как показано на фиг. 2, система управления подъемом горнодобывающей машины дополнительно содержит бесконтактный переключатель 8 подъема. Бесконтактный переключатель 8 подъема устанавливается в первое заданное положение, причем бесконтактный переключатель 8 подъема выполнен с возможностью отправки сигнала обнаружения подъема грузового контейнера 7 на контроллер 1.
Соответственно, этапы примера осуществления могут дополнительно содержать: получение сигнала обнаружения подъема, отправленного бесконтактным переключателем подъема, причем сигнал обнаружения подъема представляет собой первый сигнал обнаружения подъема высокого уровня или второй сигнал обнаружения подъема низкого уровня, при этом первый сигнал обнаружения подъема отправляется бесконтактным переключателем подъема, когда он обнаруживает, что нижняя часть грузового контейнера близка к первому заданному положению, а второй сигнал обнаружения подъема отправляется бесконтактным переключателем подъема, когда нижняя часть грузового контейнера не была обнаружена; определение того, соблюдены ли условия подъема, на основе сигнала обнаружения подъема. В частности, когда на основе сигнала обнаружения подъема определяется, что нижняя часть грузового контейнера 7 не находится в первом заданном положении (то есть в самом высоком вертикальном положении, установленном грузовым контейнером 7), можно определить, что текущие условия подъема выполнены. В противном случае считается, что условия подъема не соблюдены. Соответственно, при определении того, выполнены ли условия подъема на основе сигнала обнаружения подъема, этапы примера осуществления могут содержать: если принят первый сигнал обнаружения подъема, определение того, что условие подъема выполнено, а если принят второй сигнал обнаружения подъема, определение того, что условие подъема выполнено;
Как показано на фиг. 4, при управлении подъемом грузового контейнера 7 полными этапами осуществления могут быть: после запуска транспортного средства команда подъема (т. е. сигнальная команда подъема) отправляется на VCU (т. е. контроллер 1) посредством нажатия кнопочного переключателя 22 подъема, после получения команды подъема VCU определяет, выполнены ли условия подъема, на основе сигнала обнаружения подъема, отправленного бесконтактным переключателем 8 подъема, и когда определяется, что условия подъема выполнены, VCU управляет электромагнитным клапаном 21 подъема для включения питания. Таким образом, электромагнитный клапан 21 подъема после включения питания передает давление масла в подъемную масляную камеру гидроцилиндра 6 через шестеренчатый насос 5, то есть канал масла подъема пропускает давление масла, в результате чего грузовой контейнер 7 поднимается, а гидроцилиндр 6 может специально поднимать грузовой контейнер 7 из первого текущего положения в первое заданное положение под действием давления масла. При подъеме грузового контейнера 7 из первого текущего положения в первое заданное положение VCU также может получать сигнал обнаружения подъема, посылаемый бесконтактным переключателем подъема, в режиме реального времени, и по сигналу обнаружения подъема определять, поднят ли грузовой контейнер 7 на место (т.е. достиг ли он первого заданного положения). Когда определено, что грузовой контейнер 7 поднят на место, цепь 2 электромагнитного клапана подъема отключается, то есть электромагнитный клапан 21 подъема отключается, чтобы остановить подъем грузового контейнера 7. Если при определенных условиях (например, при подъеме до максимального заданного периода времени, в течение которого осуществляется подъем) будет определено, что грузовой контейнер 7 не достиг первого заданного положения, то VCU также может сообщить транспортному средству о неисправности и выдать оперативное сообщение для уведомления транспортного средства, что система управления подъемом работает некорректно при подъеме грузового контейнера, чтобы соответствующий персонал мог проверить и устранить неисправность.
Этап 220b - последовательное включение цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана при получении первой сигнальной команды опускания, таким образом, что когда цепь электромагнитного клапана опускания находится во включенном состоянии, грузовой контейнер опускается из второго текущего положения во второе заданное положение, а когда цепь плавающего электромагнитного клапана находится во включенном состоянии, грузовой контейнер опускается из второго заданного положения в третье заданное положение.
Как показано на фиг. 2, цепь 3 электромагнитного клапана опускания содержит электромагнитный клапан 31 опускания, шестеренчатый насос 5 и гидроцилиндр 6, а цепь 4 плавающего электромагнитного клапана содержит плавающий электромагнитный клапан 41 и гидроцилиндр 6. Соответственно, для примера осуществления настоящего изобретения этапы примера осуществления могут содержать следующее: управление электромагнитным клапаном опускания в цепи электромагнитного клапана опускания для включения питания, когда определено, что получена первая сигнальная команда опускания и условия опускания выполнены, таким образом, электромагнитный клапан опускания после включения питания передает давление масла в опускающуюся масляную камеру гидроцилиндра через шестеренчатый насос, а гидроцилиндр опускает грузовой контейнер из второго текущего положения во второе заданное положение под действием давления масла; а также после определения того, что грузовой контейнер опустился во второе заданное положение, электромагнитный клапан опускания выключается, и осуществляется управление плавающим электромагнитным клапаном в цепи плавающего электромагнитного клапана для включения питания, таким образом, плавающий электромагнитный клапан после включения питания управляет опусканием грузового контейнера из второго заданного положения в третье заданное положение под действием силы тяжести.
В конкретном сценарии применения, чтобы добиться точного управления положениями подъема и опускания грузового контейнера 7, на транспортном средстве может быть установлен бесконтактный переключатель, причем бесконтактный переключатель может отправлять различные сигналы обнаружения на контроллер 1 в зависимости от относительного положения грузового контейнера 7, то есть сигнал обнаружения используется для отражения положения перемещения грузового контейнера 7 в реальном времени. Как показано на фиг. 2, система управления подъемом горнодобывающей машины дополнительно содержит бесконтактный переключатель 9 опускания. Бесконтактный переключатель 9 опускания устанавливается во второе заданное положение, причем бесконтактный переключатель 9 опускания используется для отправки сигнала обнаружения опускания грузового контейнера 7 на контроллер 1.
Соответственно, этапы примера осуществления могут дополнительно содержать: прием сигнала обнаружения опускания, отправленного бесконтактным переключателем опускания, причем сигнал обнаружения опускания представляет собой первый сигнал обнаружения опускания низкого уровня или второй сигнал обнаружения опускания высокого уровня, при этом первый сигнал обнаружения опускания посылается бесконтактным переключателем опускания, когда он обнаруживает, что нижняя часть грузового контейнера находится близко ко второму заданному положению, а второй сигнал обнаружения опускания отправляется бесконтактным переключателем опускания, когда нижняя часть контейнера не обнаружена; и на основе сигнала обнаружения опускания определяется, соблюдено ли условие опускания. В частности, когда определяется, что дно грузового контейнера находится не во втором заданном положении, на основании сигнала обнаружения падения, можно определить, что текущее условие опускания выполнено. В противном случае считается, что условия опускания не соблюдены. Соответственно, при определении того, выполняется ли условие опускания, на основе сигнала обнаружения опускания, этапы примера осуществления могут содержать определение, что условие опускания не выполнено, если принят первый сигнал обнаружения сброса, и определение, что условие опускания выполнено, если принят второй сигнал обнаружения опускания;
Как показано на фиг. 5, при управлении опусканием грузового контейнера 7 в качестве возможного этапа осуществления после запуска транспортного средства команда опускания (т. е. первая сигнальная команда опускания) может быть отправлена на VCU (т. е. контроллер 1) через кнопочный переключатель 32 опускания. После получения команды опускания VCU определяет, выполняются ли условия опускания, и на основе сигнала обнаружения опускания, отправленного бесконтактным переключателем 9 опускания, когда определяется, что опускание выполнено, VCU управляет электромагнитным клапаном 31 опускания для включения питания, таким образом, электромагнитный клапан 31 опускания после включения питания передает давление масла в опускающуюся масляную камеру гидроцилиндра 6 через шестеренчатый насос 5, канал масла опускания пропускает давление масла, в результате чего грузовой контейнер 7 опускается, а гидроцилиндр 6 специально опускает грузовой контейнер 7 из второго текущего положения во второе заданное положение под действием давления масла; кроме того, VCU также используется для выключения электромагнитного клапана 31 опускания после определения того, что грузовой контейнер 7 опустился во второе заданное положение, и управления подачей питания на плавающий электромагнитный клапан 41, таким образом, плавающий электромагнитный клапан 41 после включения питания управляет грузовым контейнером 7, чтобы он опустился из второго заданного положения в положение под действием силы тяжести. Во время процесса опускания грузового контейнера 7 из первого текущего положения во второе заданное положение контроллер 1 также может получать сигнал обнаружения опускания, загруженный бесконтактным переключателем опускания, в режиме реального времени, и определять, достигает ли грузовой контейнер 7 второго заданного положения по сигналу обнаружения опускания. Когда определяется, что грузовой контейнер 7 достиг второго заданного положения, цепь 3 электромагнитного клапана опускания выключается, а цепь 4 плавающего электромагнитного клапана включается, то есть, электромагнитный клапан 31 опускания отключается, а плавающий электромагнитный клапан 41 включается, чтобы остановить управление опусканием грузового контейнера 7, таким образом, грузовой контейнер 7 может медленно опускаться под действием собственной силы тяжести. Если при определенных условиях (например, при опускании до максимального заданного периода времени, в течение которого осуществляется опускание) будет определено, что грузовой контейнер 7 не достиг второго заданного положения, то VCU также может сообщить транспортному средству о неисправности и выдать оперативное сообщение для уведомления транспортного средства, что система управления подъемом работает некорректно при опускании грузового контейнера 7, чтобы соответствующий персонал мог проверить и устранить неисправность.
В этом примере осуществления при управлении опусканием грузового контейнера 7 процесс опускания можно разделить на два этапа. На первом этапе используется метод механического опускания, который позволяет обеспечить эффективность опускания грузового контейнера 7 и стабильный ход работы. В следующем этапе используется метод плавающего опускания, в котором грузовой контейнер 7 медленно опускается к раме только за счет собственной силы тяжести. Этот плавающий процесс позволяет эффективно уменьшить силу удара между грузовым контейнером 7 и рамой, тем самым продлевая срок службы гидравлических компонентов.
Этап 220c - управление цепью плавающего электромагнитного клапана для включения питания при получении второй сигнальной команды опускания. Таким образом, цепь плавающего электромагнитного клапана находится во включенном состоянии, а грузовой контейнер опускается из второго текущего положения в третье заданное положение.
Для примера осуществления настоящего изобретения этапы примера осуществления могут содержать следующее: управление плавающим электромагнитным клапаном в цепи плавающего электромагнитного клапана для включения питания, когда определено, что получена вторая сигнальная команда опускания и условие опускания выполнено, таким образом, плавающий электромагнитный клапан после включения питания управляет грузовым контейнером 7, чтобы он опустился из второго текущего положения в третье заданное положение под действием силы тяжести.
В конкретном сценарии применения этапы примера осуществления могут дополнительно содержать: прием сигнала обнаружения опускания, отправленного бесконтактным переключателем опускания, причем сигнал обнаружения опускания представляет собой первый сигнал обнаружения опускания низкого уровня или второй сигнал обнаружения опускания высокого уровня, при этом первый сигнал обнаружения опускания посылается бесконтактным переключателем опускания, когда он обнаруживает, что нижняя часть грузового контейнера находится близко ко второму заданному положению, а второй сигнал обнаружения опускания отправляется бесконтактным переключателем опускания, когда нижняя часть контейнера не обнаружена; и на основе сигнала обнаружения опускания определяется, соблюдено ли условие опускания. В частности, когда определяется, что дно грузового контейнера находится не во втором заданном положении, на основании сигнала обнаружения падения, можно определить, что текущее условие опускания выполнено. В противном случае считается, что условия опускания не соблюдены. Соответственно, при определении того, выполняется ли условие опускания, на основе сигнала обнаружения опускания, этапы примера осуществления могут содержать определение, что условие опускания не выполнено, если принят первый сигнал обнаружения сброса, и определение, что условие опускания выполнено, если принят второй сигнал обнаружения опускания;
Как показано на фиг. 5, при управлении спуском грузового контейнера 7 другим возможным этапом осуществления может быть следующее: вторая сигнальная команда опускания отправляется на контроллер 1 (т.е. VCU) через плавающий кнопочный переключатель 42, и после приема второй сигнальной команды опускания контроллер 1 определяет, выполняется ли условие опускания, на основе сигнала обнаружения опускания, отправленного бесконтактным переключателем 9 опускания. Когда определяется, что опускание выполнено, осуществляется управление контроллером 1 для включения питания на плавающий электромагнитный клапан 41, таким образом, плавающий электромагнитный клапан 41 после включения питания управляет грузовым контейнером 7, чтобы он опустился из второго текущего положения в третье заданное положение под действием силы тяжести. То есть при управлении опусканием грузового контейнера 7 напрямую выбирается неактивное опускание, то есть плавающий спуск грузового контейнера 7, и грузовой контейнер 7 медленно опускается на раму только за счет собственной силы тяжести. Этот плавающий процесс позволяет эффективно снизить силу удара грузового контейнера 7 и рамы, что, в свою очередь, может продлить срок службы гидравлических компонентов.
Следует отметить, что на этапах вышеописанного примера осуществления первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером 7, третье заданное положение – это самое нижнее вертикальное положение, установленное грузовым контейнером 7, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
Таким образом, включение и выключение цепи электромагнитного клапана подъема, цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана можно контролировать в соответствии с сигнальными командами для достижения интеллектуального управления подъемом или опусканием грузового контейнера. В процессе управления опусканием грузового контейнера, когда определяется, что грузовой контейнер скоро достигнет установленного нижнего вертикального положения, используется цепь плавающего электромагнитного клапана для управления медленным опусканием грузового контейнера на раму, с опорой только на собственную силу тяжести. Этот плавающий процесс позволяет эффективно уменьшить силу удара между грузовым контейнером и рамой, тем самым продлевая срок службы гидравлических компонентов.
Основываясь на конкретном описании способа управления подъемом горнодобывающей машины, представленном на фиг. 3 выше, как показано на фиг. 6, фиг. 6 представляет собой блок-схему устройства управления подъемом горнодобывающей машины согласно иллюстративному примеру осуществления, которое может быть применено к системе управления подъемом горнодобывающей машины, показанной на фиг. 1 и 2. Как показано на фиг. 6, данное устройство содержит:
приемный модуль 51, выполненный с возможностью приема сигнальной команды для управления вертикальным перемещением контейнера, причем сигнальная команда представляет собой любую из сигнальной команды подъема, первой сигнальной команды опускания и второй сигнальной команды опускания;
модуль 52 управления, выполненный с возможностью управления цепью электромагнитного клапана подъема для получения питания при получении сигнальной команды подъема, в результате чего во включенном состоянии грузовой контейнер поднимается из первого текущего положения в первое заданное положение;
модуль 52 управления дополнительно выполнен с возможностью последовательного включения цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана при получении первой сигнальной команды опускания, таким образом, что, когда цепь электромагнитного клапана опускания находится во включенном состоянии, грузовой контейнер опускается из второго текущего положения во второе заданное положение, а когда цепь плавающего электромагнитного клапана находится во включенном состоянии, грузовой контейнер опускается из второго заданного положения в третье заданное положение;
модуль 52 управления дополнительно выполнен с возможностью управления цепью плавающего электромагнитного клапана для включения питания при получении второй сигнальной команды опускания, таким образом, что цепь плавающего электромагнитного клапана находится во включенном состоянии, а грузовой контейнер опускается из второго текущего положения в третье заданное положение;
при этом первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером, третье заданное положение – это самое нижнее вертикальное положение, установленное грузовым контейнером, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
В некоторых примерах осуществления настоящего изобретения модуль 52 управления выполнен с возможностью управления электромагнитным клапаном подъема в цепи электромагнитного клапана подъема для включения питания, когда определяется, что сигнальная команда подъема получена и условия подъема выполнены, в результате чего электромагнитный клапан подъема после включения питания передает через шестеренчатый насос давление масла в подъемную масляную камеру гидроцилиндра, а гидроцилиндр под действием давления масла поднимает грузовой контейнер из первого текущего положения в первое заданное положение.
В некоторых примерах осуществления настоящего изобретения, как показано на фиг. 7, устройство дополнительно содержит: модуль 53 определения;
приемный модуль 51 дополнительно выполнен с возможностью приема сигнала обнаружения подъема, отправленного бесконтактным переключателем подъема, причем сигнал обнаружения подъема представляет собой первый сигнал обнаружения подъема высокого уровня или второй сигнал обнаружения подъема низкого уровня, при этом первый сигнал обнаружения подъема отправляется бесконтактным переключателем подъема, когда он обнаруживает, что нижняя часть грузового контейнера близка к первому заданному положению, а второй сигнал обнаружения подъема отправляется бесконтактным переключателем подъема, когда нижняя часть грузового контейнера не была обнаружена;
модуль 53 определения, выполненный с возможностью определения того, соблюдены ли условия подъема, на основе сигнала обнаружения подъема;
Соответственно, модуль 53 определения может быть специально выполнен с возможностью определения того, что условие подъема не выполнено, если получен первый сигнал обнаружения подъема; и определения того, что условия подъема соблюдены, если получен второй сигнал обнаружения подъема.
В некоторых примерах осуществления настоящего изобретения модуль 52 управления выполнен с возможностью управления электромагнитным клапаном опускания в цепи электромагнитного клапана опускания для включения питания, когда определено, что получена первая сигнальная команда опускания и условия опускания выполнены, таким образом, что электромагнитный клапан опускания после включения питания передает давление масла в опускающуюся масляную камеру гидроцилиндра через шестеренчатый насос, а гидроцилиндр опускает грузовой контейнер из второго текущего положения во второе заданное положение под действием давления масла; а также после определения того, что грузовой контейнер опустился во второе заданное положение, электромагнитный клапан опускания выключается, и осуществляется управление плавающим электромагнитным клапаном в цепи плавающего электромагнитного клапана для включения питания, таким образом, что плавающий электромагнитный клапан после включения питания управляет опусканием грузового контейнера из второго заданного положения в третье заданное положение под действием силы тяжести.
В некоторых примерах осуществления настоящего изобретения модуль 52 управления выполнен с возможностью управления плавающим электромагнитным клапаном в цепи плавающего электромагнитного клапана для включения питания, когда определено, что получена вторая сигнальная команда опускания и условие опускания выполнено, таким образом, что плавающий электромагнитный клапан после включения питания управляет грузовым контейнером, чтобы он опустился из второго текущего положения в третье заданное положение под действием силы тяжести.
В некоторых примерах осуществления настоящего изобретения приемный модуль 51 дополнительно выполнен с возможностью приема сигнала обнаружения опускания, отправленного бесконтактным переключателем опускания, причем сигнал обнаружения опускания представляет собой первый сигнал обнаружения опускания низкого уровня или второй сигнал обнаружения опускания высокого уровня, при этом первый сигнал обнаружения опускания посылается бесконтактным переключателем опускания, когда он обнаруживает, что нижняя часть грузового контейнера находится близко ко второму заданному положению, а второй сигнал обнаружения опускания отправляется бесконтактным переключателем опускания, когда нижняя часть контейнера не обнаружена;
модуль 53 определения, дополнительно выполненный с возможностью определения того, соблюдены ли условия опускания, на основе сигнала обнаружения опускания.
Соответственно, модуль 53 определения также может быть специально выполнен с возможностью определения, что условие опускания не выполнено, если принят первый сигнал обнаружения сброса, и определения, что условие опускания выполнено, если принят второй сигнал обнаружения опускания.
Что касается устройства в приведенном выше примере осуществления, то конкретный способ, с помощью которого каждый модуль выполняет операции, был подробно описан в примере осуществления способа и не будет описываться здесь подробно.
Приведенное выше в сочетании с прилагаемыми чертежами описывает устройство управления подъемом горнодобывающей машины согласно примерам осуществления настоящего изобретения с точки зрения функционального модуля. Следует понимать, что этот функциональный модуль может быть реализован в виде аппаратных средств, а также может быть реализован посредством команд в виде программного обеспечения или также может быть реализован посредством комбинации аппаратных и программных модулей. В частности, каждый этап примера осуществления способа управления подъемом горнодобывающей машины в примере осуществления настоящего изобретения может быть дополнен инструкциями в виде интегральных логических схем аппаратного и/или программного обеспечения в процессоре, этапы способа управления подъемом горнодобывающей машины в сочетании с примерами осуществления настоящего изобретения, могут быть непосредственно реализованы процессором аппаратного декодирования или выполнены посредством комбинации аппаратных и программных модулей в процессоре декодирования. Альтернативно, программный модуль может быть расположен в запоминающем устройстве с произвольным доступом, флэш-памяти, постоянной памяти, программируемой постоянной памяти, электрически перезаписываемой программируемой памяти, регистрах и других известных носителях информации. Носитель информации находится в памяти, а процессор считывает информацию, хранящуюся в памяти, и объединяет свои аппаратные средства для выполнения этапов примеров осуществления способа управления подъемом горнодобывающей машины.
Фиг. 8 представляет собой схематическую блок-схему электронного оборудования 900 согласно примеру осуществления настоящего изобретения.
Как показано на фиг. 8, электронное оборудование 900 может содержать:
память 910 и процессор 920, причем память 910 используется для хранения компьютерной программы и передачи программного кода в процессор 920. Другими словами, процессор 920 может вызывать и запускать компьютерную программу из памяти 910 для реализации способа в примере осуществления настоящего изобретения.
Например, процессор 920 может быть выполнен с возможностью выполнения вышеуказанного примера осуществления способа в соответствии с командами в компьютерной программе.
В некоторых примерах осуществления настоящего изобретения электронное оборудование 900 может содержать, помимо прочего:
общий процессор, процессор цифровых сигналов (Digital Signal Processor, DSP), специализированную интегральную схему (Application Specific Integrated Circuit, ASIC), программируемую пользователем вентильную матрицу (Field Programmable Gate Array, FPGA) или другие программируемые логические устройства, дискретные вентильные или транзисторные логические устройства, дискретные аппаратные компоненты и т. д.
В некоторых примерах осуществления настоящего изобретения память 910 содержит, помимо прочего:
энергозависимую память и/или энергонезависимую память. При этом энергонезависимая память может представлять собой постоянную память (Read-Only Memory, ROM), программируемую постоянную память (Programmable ROM, PROM), стираемую программируемую постоянную память (Erasable PROM, EPROM), электрически съемную память (Electrically EPROM, EEPROM) или флэш-память. Энергозависимая память может быть оперативной памятью (Random Access Memory, RAM), которая используется в качестве внешнего кэша. В качестве примера, но не ограничительного описания, доступно множество форм оперативной памяти RAM, таких как статическая оперативная память с произвольным доступом (Static RAM, SRAM), динамическая оперативная память (Dynamic RAM, DRAM), синхронная динамическая оперативная память с произвольным доступом (Synchronous DRAM, SDRAM), синхронная динамическая оперативная память с двойной скоростью передачи данных (Double Data Rate SDRAM, DDR SDRAM), улучшенная синхронная динамическая оперативная память (Enhanced SDRAM, ESDRAM), динамическая оперативная память с синхронным подключением (Synch link DRAM, SLDRAM) и оперативная память с прямым доступом к шине памяти (Direct Rambus RAM, DR RAM).
В некоторых примерах осуществления настоящего изобретения компьютерная программа может быть разделена на один или более модулей, которые сохраняются в памяти 910 и выполняются процессором 920 для выполнения способа, предусмотренного настоящим изобретением. Один или более модулей могут представлять собой последовательность сегментов команд компьютерной программы, способных выполнять определенные функции, которые используются для описания процесса выполнения компьютерной программы в контроллере.
Как показано на фиг. 8, электронное оборудование 900 также может содержать:
приемопередатчик 930, причем приемопередатчик 930 может быть подключен к процессору 920 или памяти 910.
При этом процессор 920 может управлять приемопередатчиком 930 для связи с другими устройствами, в частности, он может отправлять информацию или данные на другие устройства или принимать информацию или данные, отправленные другими устройствами. Приемопередатчик 930 может содержать передатчик и приемник. Приемопередатчик 930 может дополнительно содержать антенны, причем может быть предусмотрена одна антенна или несколько.
Следует понимать, что различные компоненты электронного оборудования соединены через систему шин, причем система шин содержит шину питания, шину управления и шину сигналов состояния в дополнение к шине данных.
Изобретение также относится к компьютерному носителю информации, на котором хранится компьютерная программа, и когда компьютерная программа выполняется компьютером, компьютер может выполнять способ по вышеупомянутому примеру осуществления способа. Другими словами, пример осуществления, предусмотренный настоящим изобретением, также относится к компьютерному программному продукту, содержащему команды, которые при выполнении компьютером заставляют компьютер выполнять способ описанного выше примера осуществления способа.
При осуществлении с помощью программного обеспечения он может быть реализован полностью или частично в виде компьютерного программного продукта. Компьютерный программный продукт содержит одну или несколько компьютерных команд. Когда команды компьютерной программы загружаются и выполняются на компьютере, полностью или частично генерируется процесс или функция, описанные в соответствии с примером осуществления изобретения. Компьютер может быть компьютером общего назначения, специализированным компьютером, компьютерной сетью или другим программируемым устройством. Компьютерные команды могут храниться на машиночитаемом носителе данных или передаваться с одного машиночитаемого носителя данных на другой машиночитаемый носитель данных, например, компьютерные команды могут передаваться с веб-сайта, компьютера, сервера или центра обработки данных по проводам (например, коаксиальному кабелю, оптоволоконному кабелю, цифровой абонентской линии (DSL)) или по беспроводной сети (например, через инфракрасный порт, беспроводную связь, микроволны и т. д.) на другой веб-сайт, компьютер, сервер или центр обработки данных. Машиночитаемым носителем информации может быть любой доступный носитель, к которому компьютер может получить доступ, или устройство хранения данных, такое как сервер, центр обработки данных и т. д., которое содержит один или более интегрированных доступных носителей. Доступными носителями могут быть магнитные носители (например, гибкие диски, жесткие диски, магнитные ленты), оптические носители (например, цифровые видеодиски (DVD)) или полупроводниковые носители (например, твердотельные диски (SSD)) и тому подобное.
Специалисты в данной области техники могут понять, что модули и этапы алгоритма каждого примера, описанного здесь в связи с примерами осуществления настоящего изобретения, могут быть реализованы с помощью электронного аппаратного обеспечения или комбинации компьютерного программного обеспечения и электронного аппаратного обеспечения. Будут ли эти функции выполняться аппаратно или программно, зависит от конкретного применения и конструктивных ограничений технического решения. Квалифицированные специалисты могут использовать различные методы для каждого конкретного применения для достижения описанных функций, однако такие реализации не следует рассматривать как выходящие за рамки настоящего изобретения.
В нескольких примерах осуществления, предусмотренных настоящим изобретением, следует понимать, что раскрытые системы, устройства и способы могут быть реализованы другими способами. Например, описанные выше примеры осуществления устройства являются лишь иллюстративными, например, разделение модулей представляет собой исключительно разделение логических функций, в реальной реализации могут существовать и другие способы разделения, например, несколько модулей или компонентов могут быть объединены или интегрированы в другую систему, или некоторые функции могут быть опущены или не реализованы. С другой стороны, показанное или обсуждаемое соединение или прямое соединение или коммуникационное соединение друг с другом может осуществляться через некоторые интерфейсы, косвенное соединение или коммуникационное соединение устройств или модулей и может быть в электрической, механической или прочих формах.
Модули, описанные как отдельные компоненты, могут быть физически разделены или не разделены, а компоненты, отображаемые в виде модулей, могут быть физическими модулями или не быть ими, то есть они могут быть расположены в одном месте или могут быть распределены по нескольким сетевым узлам. Некоторые или все модули могут быть выбраны в соответствии с фактическими потребностями для достижения цели решения по данному примеру осуществления. Например, каждый функциональный модуль в каждом примере осуществления настоящего изобретения может быть интегрирован в модуль обработки, каждый модуль может существовать физически отдельно, или два или более модулей могут быть интегрированы в один модуль.
Приведенное выше представляет собой только конкретные способы осуществления настоящего изобретения, но объем охраны настоящего изобретения не ограничивается ими, любой специалист, знакомый с технической областью, может легко придумать изменения или замены в пределах технического объема, раскрытого в настоящем изобретении, и они должны охватываться объемом охраны настоящего изобретения. Следовательно, объем охраны настоящего изобретения должен соответствовать объему охраны формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ ПРОИЗВОДИТЕЛЬНОСТЬЮ ГОРНОДОБЫВАЮЩЕЙ СИСТЕМЫ | 2016 |
|
RU2799934C2 |
| Машина для укладки изделий в траншею | 1990 |
|
SU1802384A1 |
| СИСТЕМА И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОРГУЗОЧНО- РАЗГРУЗОЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2578649C2 |
| Управление производительностью горнодобывающей системы | 2016 |
|
RU2712812C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2277065C2 |
| РЕКУПЕРАТИВНАЯ ГЕНЕРАТОРНАЯ СИСТЕМА ДЛЯ ЭЛЕКТРИЧЕСКОГО ПОГРУЗЧИКА | 2011 |
|
RU2603811C2 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ МАШИНОЙ И СПОСОБЫ ЕЕ ЭКСПЛУАТАЦИИ | 2007 |
|
RU2428744C2 |
| Подъемник для колбасных рам | 1978 |
|
SU766560A1 |
Группа изобретений относится к системе, способу и устройству управления подъемом горнодобывающей машины, горнодобывающей машине и машиночитаемому носителю информации и относится к технической области управления транспортным средством. Система управления подъемом горнодобывающей машины содержит контроллер, а также подключенную к грузовому контейнеру цепь электромагнитного клапана подъема, цепь электромагнитного клапана опускания и цепь плавающего электромагнитного клапана. Контроллер подключен к цепи электромагнитного клапана подъема, цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана. Контроллер выполнен с возможностью управления включением цепи электромагнитного клапана подъема после получения сигнальной команды подъема. Цепь электромагнитного клапана подъема выполнена с возможностью подъема грузового контейнера из первого текущего положения в первое заданное положение во включенном состоянии. Контроллер дополнительно выполнен с возможностью управления включением цепи плавающего электромагнитного клапана или управления включением цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана после получения сигнальной команды опускания. Цепь электромагнитного клапана опускания выполнена с возможностью опускания грузового контейнера из второго текущего положения во второе заданное положение во включенном состоянии, а цепь плавающего электромагнитного клапана выполнена с возможностью опускания грузового контейнера из второго заданного положения в третье заданное положение во включенном состоянии или опускания грузового контейнера из второго текущего положения в третье заданное положение во включенном состоянии. Цепь плавающего электромагнитного клапана выполнена с возможностью управления замедленным опусканием грузового контейнера на раму под действием собственной силы тяжести грузового контейнера. Первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером, третье заданное положение – самое нижнее вертикальное положение, установленное грузовым контейнером, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения. Технический результат заключается в уменьшении удара между грузовым контейнером и рамой и в продлении срока службы гидравлических компонентов. 5 н. и 9 з.п. ф-лы, 8 ил.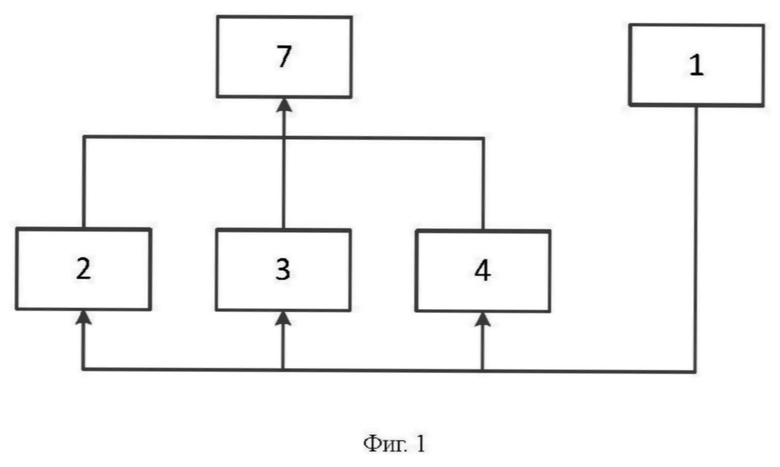
1. Система управления подъемом горнодобывающей машины, отличающаяся тем, что содержит: контроллер, а также подключенную к грузовому контейнеру цепь электромагнитного клапана подъема, цепь электромагнитного клапана опускания и цепь плавающего электромагнитного клапана;
контроллер соответственно подключен к цепи электромагнитного клапана подъема, цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана;
контроллер выполнен с возможностью управления включением цепи электромагнитного клапана подъема после получения сигнальной команды подъема, цепь электромагнитного клапана подъема выполнена с возможностью подъема грузового контейнера из первого текущего положения в первое заданное положение во включенном состоянии; контроллер дополнительно выполнен с возможностью управления включением цепи плавающего электромагнитного клапана или управления включением цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана после получения сигнальной команды опускания, причем цепь электромагнитного клапана опускания выполнена с возможностью опускания грузового контейнера из второго текущего положения во второе заданное положение во включенном состоянии, а цепь плавающего электромагнитного клапана выполнена с возможностью опускания грузового контейнера из второго заданного положения в третье заданное положение во включенном состоянии или опускания грузового контейнера из второго текущего положения в третье заданное положение во включенном состоянии, причем
цепь плавающего электромагнитного клапана выполнена с возможностью управления замедленным опусканием грузового контейнера на раму под действием собственной силы тяжести грузового контейнера;
при этом первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером, третье заданное положение – самое нижнее вертикальное положение, установленное грузовым контейнером, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
2. Система управления подъемом горнодобывающей машины по п. 1, отличающаяся тем, что цепь электромагнитного клапана подъема содержит электромагнитный клапан подъема, шестеренчатый насос и гидроцилиндр;
причем контроллер подключен к электромагнитному клапану подъема, электромагнитный клапан подъема подключен к гидроцилиндру через шестеренчатый насос, а гидроцилиндр подключен к нижней части грузового контейнера;
контроллер выполнен с возможностью определения того, выполняются ли условия подъема после получения сигнальной команды подъема, при этом, когда будет определено, что условия подъема выполнены, осуществляется управление электромагнитным клапаном подъема для включения питания, в результате чего электромагнитный клапан подъема после включения питания используется для передачи давления масла через шестеренчатый насос в подъемную масляную камеру гидроцилиндра, который под действием давления масла поднимает грузовой контейнер из первого текущего положения в первое заданное положение.
3. Система управления подъемом горнодобывающей машины по п. 2, отличающаяся тем, что цепь электромагнитного клапана опускания содержит электромагнитный клапан опускания, шестеренчатый насос и гидроцилиндр, цепь плавающего электромагнитного клапана содержит плавающий электромагнитный клапан и гидроцилиндр, а сигнальная команда опускания содержит первую сигнальную команду опускания и вторую сигнальную команду опускания;
контроллер соединен с электромагнитным клапаном опускания и плавающим электромагнитным клапаном соответственно, причем электромагнитный клапан опускания соединен с гидроцилиндром через шестеренчатый насос, плавающий электромагнитный клапан соединен с гидроцилиндром, а гидроцилиндр подключен к нижней части грузового контейнера;
контроллер выполнен с возможностью определения того, выполняются ли условия подъема после получения первой сигнальной команды опускания, при этом, когда будет определено, что условия опускания выполнены, осуществляется управление электромагнитным клапаном опускания для включения питания, в результате чего электромагнитный клапан опускания после включения питания используется для передачи давления масла через шестеренчатый насос в опускающуюся масляную камеру гидроцилиндра, который под действием давления масла опускает грузовой контейнер из второго текущего положения во второе заданное положение;
контроллер дополнительно выполнен с возможностью отключения электромагнитного клапана опускания после определения того, что грузовой контейнер опустился во второе заданное положение, и управления плавающим электромагнитным клапаном для включения питания, в результате чего плавающий электромагнитный клапан после включения питания управляет перемещением грузового контейнера из второго заданного положения в третье заданное положение под действием силы тяжести, или
контроллер выполнен с возможностью определения того, соблюдены ли условия опускания после получения второй сигнальной команды опускания, при этом, когда определено, что условие опускания выполнено, плавающий электромагнитный клапан управляется для включения питания, в результате чего плавающий электромагнитный клапан после включения питания управляет грузовым контейнером для опускания из второго текущего положения в третье заданное положение под действием силы тяжести.
4. Система управления подъемом горнодобывающей машины по п. 3, отличающаяся тем, что она дополнительно содержит: кнопочный переключатель подъема, кнопочный переключатель опускания и плавающий кнопочный переключатель;
причем кнопочный переключатель подъема, кнопочный переключатель опускания и плавающий кнопочный переключатель соответственно подключены к контроллеру, кнопочный переключатель подъема выполнен с возможностью отправки сигнальной команды подъема на контроллер, кнопочный переключатель опускания выполнен с возможностью отправки первой сигнальной команды опускания на контроллер, а плавающий кнопочный переключатель выполнен с возможностью отправки второй сигнальной команды вниз на контроллер.
5. Система управления подъемом горнодобывающей машины по п. 4, дополнительно содержащая бесконтактный переключатель подъема и бесконтактный переключатель опускания, причем бесконтактный переключатель подъема установлен в первом заданном положении, а бесконтактный переключатель опускания установлен во втором заданном положении;
бесконтактный переключатель подъема подключен к контроллеру, причем бесконтактный переключатель подъема выполнен с возможностью отправки сигнала обнаружения подъема грузового контейнера на контроллер, при этом, когда бесконтактный переключатель подъема обнаруживает, что нижняя часть грузового контейнера находится близко к первому заданному положению, он отправляет контроллеру первый сигнал обнаружения подъема высокого уровня, а когда бесконтактный переключатель подъема не обнаруживает нижнюю часть грузового контейнера, он отправляет контроллеру второй сигнал обнаружения подъема низкого уровня;
бесконтактный переключатель опускания подключен к контроллеру, причем бесконтактный переключатель опускания используется для отправки сигнала обнаружения опускания грузового контейнера на контроллер, при этом, когда бесконтактный переключатель опускания обнаруживает, что нижняя часть грузового контейнера находится близко ко второму заданному положению, он отправляет контроллеру первый сигнал обнаружения опускания низкого уровня, а когда бесконтактный переключатель опускания не обнаруживает нижнюю часть грузового контейнера, он отправляет контроллеру второй сигнал обнаружения опускания высокого уровня.
6. Способ управления подъемом горнодобывающей машины, отличающийся тем, что способ применяется к системе управления подъемом горнодобывающей машины, описанной по п. 5, причем способ содержит:
прием сигнальной команды для управления вертикальным перемещением контейнера, причем сигнальная команда представляет собой любую из сигнальной команды подъема, первой сигнальной команды опускания, второй сигнальной команды опускания или сигнала обнаружения опускания;
управление цепью электромагнитного клапана подъема для получения питания при получении сигнальной команды подъема, в результате чего во включенном состоянии грузовой контейнер поднимается из первого текущего положения в первое заданное положение;
последовательное включение цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана при получении первой сигнальной команды опускания таким образом, что, когда цепь электромагнитного клапана опускания находится во включенном состоянии, грузовой контейнер опускается из второго текущего положения во второе заданное положение, а когда цепь плавающего электромагнитного клапана находится во включенном состоянии, грузовой контейнер опускается из второго заданного положения в третье заданное положение;
управление цепью плавающего электромагнитного клапана для включения питания при получении второй сигнальной команды опускания таким образом, что цепь плавающего электромагнитного клапана находится во включенном состоянии, а грузовой контейнер опускается из второго текущего положения в третье заданное положение;
управление цепью плавающего электромагнитного клапана для включения питания при получении сигнала обнаружения опускания таким образом, что цепь плавающего электромагнитного клапана управляет замедленным опусканием грузового контейнера на раму под действием собственной силы тяжести грузового контейнера;
при этом первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером, третье заданное положение – самое нижнее вертикальное положение, установленное грузовым контейнером, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
7. Способ управления подъемом горнодобывающей машины по п. 6, отличающийся тем, что осуществляется управление цепью электромагнитного клапана подъема для получения питания при получении сигнальной команды подъема, в результате чего во включенном состоянии грузовой контейнер поднимается из первого текущего положения в первое заданное положение, включая:
когда определяется, что сигнальная команда подъема получена и условия подъема выполнены, управление электромагнитным клапаном подъема в цепи электромагнитного клапана подъема для включения питания, в результате чего электромагнитный клапан подъема после включения питания передает через шестеренчатый насос давление масла в подъемную масляную камеру гидроцилиндра, а гидроцилиндр под действием давления масла поднимает грузовой контейнер из первого текущего положения в первое заданное положение.
8. Способ управления подъемом горнодобывающей машины по п. 7, отличающийся тем, что способ дополнительно содержит:
прием сигнала обнаружения подъема, отправленного бесконтактным переключателем подъема, причем сигнал обнаружения подъема представляет собой первый сигнал обнаружения подъема высокого уровня или второй сигнал обнаружения подъема низкого уровня, первый сигнал обнаружения подъема отправляется бесконтактным переключателем подъема, когда он обнаруживает, что нижняя часть грузового контейнера близка к первому заданному положению, а второй сигнал обнаружения подъема отправляется бесконтактным переключателем подъема, когда нижняя часть грузового контейнера не была обнаружена;
определение того, выполнено ли условие подъема, на основе сигнала обнаружения подъема;
причем сигнал обнаружения подъема основан на сигнале обнаружения подъема, позволяющем определить, соблюдены ли условия подъема, включая:
если принят первый сигнал обнаружения подъема, определение того, что условие подъема не выполнено;
если принят второй сигнал обнаружения подъема, определение того, что условие подъема выполнено.
9. Способ управления подъемом горнодобывающей машины по п. 6, отличающийся тем, что осуществляется последовательное включение цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана при получении первой сигнальной команды опускания таким образом, что, когда цепь электромагнитного клапана опускания находится во включенном состоянии, грузовой контейнер опускается из второго текущего положения во второе заданное положение, а когда цепь плавающего электромагнитного клапана находится во включенном состоянии, грузовой контейнер опускается из второго заданного положения в третье заданное положение, включая:
управление электромагнитным клапаном опускания в цепи электромагнитного клапана опускания, на который подается питание, когда определено, что получена первая сигнальная команда опускания и условие опускания выполнено, таким образом, что электромагнитный клапан опускания после включения питания передает давление масла в опускающуюся масляную камеру гидроцилиндра через шестеренчатый насос, а гидроцилиндр под действием давления масла опускает грузовой контейнер из второго текущего положения во второе заданное положение;
после определения того, что грузовой контейнер опустился во второе заданное положение, отключение электромагнитного клапана опускания и управление плавающим электромагнитным клапаном в цепи плавающего электромагнитного клапана для включения питания таким образом, что плавающий электромагнитный клапан после включения питания управляет грузовым контейнером, чтобы он опустился из второго заданного положения в третье заданное положение под действием силы тяжести.
10. Способ управления подъемом горнодобывающей машины по п. 6, отличающийся тем, что осуществляется управление цепью плавающего электромагнитного клапана для включения питания при получении второй сигнальной команды опускания таким образом, что цепь плавающего электромагнитного клапана находится во включенном состоянии, а грузовой контейнер опускается из второго текущего положения в третье заданное положение, включая:
когда определено, что получена вторая сигнальная команда опускания и условие опускания выполнено, управление плавающим электромагнитным клапаном в цепи плавающего электромагнитного клапана для включения питания таким образом, что плавающий электромагнитный клапан после включения питания управляет грузовым контейнером, чтобы он опустился из второго текущего положения в третье заданное положение под действием силы тяжести.
11. Способ управления подъемом горнодобывающей машины по п. 9 или 10, отличающийся тем, что способ дополнительно содержит:
прием сигнала обнаружения опускания, отправленного бесконтактным переключателем опускания, причем сигнал обнаружения опускания представляет собой первый сигнал обнаружения опускания низкого уровня или второй сигнал обнаружения опускания высокого уровня, первый сигнал обнаружения опускания отправляется бесконтактным переключателем опускания, когда он обнаруживает, что нижняя часть грузового контейнера находится близко ко второму заданному положению, а второй сигнал обнаружения опускания посылается бесконтактным переключателем опускания, когда нижняя часть грузового контейнера не была обнаружена;
определение того, выполняется ли условие опускания, на основе сигнала обнаружения опускания;
при этом определение того, выполняется ли условие опускания, на основе сигнала обнаружения опускания, содержит:
если принят первый сигнал обнаружения опускания, определение того, что условие опускания не выполнено;
если принят второй сигнал обнаружения опускания, определение того, что условие опускания выполнено.
12. Устройство управления подъемом горнодобывающей машины, отличающееся тем, что устройство применяется в системе управления подъемом горнодобывающей машины по п. 5, причем устройство содержит:
приемный модуль, выполненный с возможностью приема сигнальной команды для управления вертикальным перемещением контейнера, причем сигнальная команда представляет собой любую из сигнальной команды подъема, первой сигнальной команды опускания, второй сигнальной команды опускания или сигнала обнаружения опускания;
модуль управления, выполненный с возможностью управления цепью электромагнитного клапана подъема для получения питания при получении сигнальной команды подъема, в результате чего во включенном состоянии грузовой контейнер поднимается из первого текущего положения в первое заданное положение;
модуль управления дополнительно выполнен с возможностью последовательного включения цепи электромагнитного клапана опускания и цепи плавающего электромагнитного клапана при получении первой сигнальной команды опускания таким образом, что, когда цепь электромагнитного клапана опускания находится во включенном состоянии, грузовой контейнер опускается из второго текущего положения во второе заданное положение, а когда цепь плавающего электромагнитного клапана находится во включенном состоянии, грузовой контейнер опускается из второго заданного положения в третье заданное положение;
модуль управления дополнительно выполнен с возможностью управления цепью плавающего электромагнитного клапана для включения питания при получении второй сигнальной команды опускания таким образом, что цепь плавающего электромагнитного клапана находится во включенном состоянии, а грузовой контейнер опускается из второго текущего положения в третье заданное положение;
модуль управления дополнительно выполнен с возможностью управления цепью плавающего электромагнитного клапана для включения питания при получении сигнала обнаружения опускания таким образом, что цепь плавающего электромагнитного клапана управляет замедленным опусканием грузового контейнера на раму под действием собственной силы тяжести грузового контейнера;
при этом первое заданное положение является самым высоким вертикальным положением, установленным грузовым контейнером, третье заданное положение – самое нижнее вертикальное положение, установленное грузовым контейнером, второе заданное положение ниже, чем первое заданное положение, и выше, чем третье заданное положение, первым текущим положением является любое положение, отличное от первого заданного положения, а второе текущее положение представляет собой любое положение выше второго заданного положения.
13. Горнодобывающая машина, отличающаяся тем, что она содержит систему управления подъемом горнодобывающей машины по любому из пп. 1-5.
14. Машиночитаемый носитель информации, отличающийся тем, что он используется для хранения компьютерной программы, причем компьютерная программа заставляет компьютер реализовать способ по любому из пп. 6-11.
| US 5393937 A, 28.02.1995 | |||
| Устройство для автоматической защиты электродвигателя исполнительного органа горной машины от перегрузок | 1979 |
|
SU898057A1 |
| Устройство для транспортировки длинномеров в шахтах | 1983 |
|
SU1153088A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ЗАСТЫВАНИЯ НЕФТЕПРОДУКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581383C1 |
| US 11607982 B2, 21.03.2023 | |||
| CN 115628103 A, 20.01.2023. | |||

