Область изобретения
[0001] Настоящее изобретение относится к управлению производительностью длиннозабойной горнодобывающей системы. Длиннозабойная горнодобывающая система содержит длиннозабойную врубовую машину и транспортер, такой как забойный скребковый конвейер ("ЗСК") или консольный перегружатель ("КП").
Краткое описание изобретения
[0002] Длиннозабойные системы добычи для подземных разработок содержат, например, врубовую машину для удаления добытого материала (напр., угля) из очистного забоя, и транспортер, такой как ЗСК или КП для транспортировки добытого материала из зоны, в которой материал добывается в дону переработки (дробления, складирования и пр.). Врубовая машина приводится в действие одним или более приводным механизмом (напр., электродвигателем) для изменения положения вдоль очистного забоя и удаления добытого материала из очистного забоя. ЗСК содержат, например, первое цепное колесо и второе цепное колесо, вокруг которых проходит цепь. Цепь приводится в движение одним или более приводным механизмом (напр., передним электродвигателем, хвостовым электродвигателем и т.п.), и движение цепи вокруг цепных колес заставляет транспортер транспортировать добытый материал.
[0003] Когда врубовая машина движется вдоль ЗСК и материал удаляется из очистного забоя, существует возможность того, что ЗСК будет работать в недогруженном состоянии. Например, когда на ЗСК имеется относительно немного добытого материала (напр., по сравнению с максимальной нагрузкой ЗСК), горнодобывающая система может иметь неиспользуемую производительность. Если после обнаружения факта работы горнодобывающей системы не с полной производительностью, производительность горнодобывающей системы увеличивают, горнодобывающая система выбирает неиспользуемую производительность и извлекает больше материала из горной разработки. Показатели горной разработки можно увеличить, например, увеличивая скорость врубовой машины и/или скорость транспортера. Аналогично, если горнодобывающая система работает сверх полной производительности, показатели горнодобывающей системы можно понизить для предотвращения повреждения горнодобывающей системы.
[0004] Настоящее изобретение относится к применению контроллера для управления скоростью врубовой машины и/или транспортера длиннозабойной горнодобывающей системы для регулирования производительности этой горнодобывающей системы. Контроллер принимает сигналы, относящиеся к положению врубовой машины и/или нагрузке транспортера и определяет производительность горнодобывающей системы. Контроллер может изменять или регулировать (напр., увеличивать или уменьшать) скорость врубовой машины и/или транспортера на основе производительности горнодобывающей системы для повышения производительности этой горнодобывающей системы. Например, увеличение скорости врубовой машины приводит к увеличению количества добытого материала, удаляемого из очистного забоя, а увеличение скорости транспортера приводит к ускорению транспортировки добытого материала в зону переработки.
[0005] В одном варианте согласно настоящему изобретению предлагается горнодобывающая система. Эта горнодобывающая система содержит врубовую машину, транспортер, первый приводной механизм, соединенный с врубовой машиной, первый датчик, второй датчик и контроллер. Первый приводной механизм выполнен с возможностью приведения в действие врубовой машины. Первый датчик выполнен с возможностью генерирования первого сигнала, относящегося к положению врубовой машины. Второй датчик выполнен с возможностью генерирования второго сигнала, относящегося к нагрузке транспортера. Контроллер выполнен с возможностью приема первого сигнала от первого датчика, определения положения врубовой машины на основе первого сигнала, приема второго сигнала от второго датчика и определения нагрузки транспортера на основе второго сигнала. Контроллер далее выполнен с возможностью определения производительности горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера и для управления скоростью врубовой машины на основе производительности горнодобывающей системы.
[0006] В другом варианте согласно настоящему изобретению предлагается способ управления производительностью горнодобывающей системы. Способ содержит этапы, на которых принимают на процессоре первый сигнал, связанный с положением врубовой машины, определяют с помощью процессора положение врубовой машины на основе первого сигнала, принимают на процессоре второй сигнал, связанный с нагрузкой транспортера и определяют с помощью процессора нагрузку транспортера на основе второго сигнала. Способ далее содержит этапы, на которых определяют с помощью процессора, производительность горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера и управляют скоростью врубовой машины на основе производительности горнодобывающей системы.
[0007] В другом варианте согласно настоящему изобретению предлагается горнодобывающая система. Горнодобывающая система содержит врубовую машину, транспортер, первый приводной механизм, соединенный с транспортером, первый датчик, второй датчик и контроллер. Первый приводной механизм выполнен с возможностью привода транспортера. Первый датчик выполнен с возможностью генерирования первого сигнала, относящегося к положению врубовой машины. Второй датчик выполнен с возможностью генерирования второго сигнала, относящегося к нагрузке транспортера. Контроллер выполнен с возможностью приема первого сигнала от первого датчика, для определения положения врубовой машины на основе первого сигнала, приема второго сигнала т второго датчика и определения нагрузки транспортера на основе второго сигнала. Контроллер далее выполнен с возможностью определения производительности горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера и для управления скоростью транспортера на основе производительности горнодобывающей системы.
[0008] В другом варианте согласно настоящему изобретению предлагается способ управления производительностью горнодобывающей системы. Способ содержит этапы, на которых принимают на процессоре первый сигнал, связанный с положением врубовой машины, определяют с помощью процессора положение врубовой машины на основе первого сигнала, принимают на процессоре второй сигнал, связанный с нагрузкой транспортера и определяют с помощью процессора нагрузку транспортера на основе второго сигнала. Способ далее содержит этапы, на которых определяют с помощью процессора, производительность горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера и управляют скоростью транспортера на основе производительности горнодобывающей системы.
[0009] Прежде чем приступать к подробному описанию вариантов изобретения, следует понять, что изобретение не ограничивается деталями конфигурации и расположением компонентов, которые приведены в нижеследующем описании или показаны на приложенных чертежах. Изобретение может быть реализовано в других вариантах или разными способами. Кроме того, следует понимать, что применяемая фразеология и терминология предназначена для описания и не должна считаться ограничивающей. Термины "включающий", "содержащий" или "имеющий" и их варианты охватывают объекты, перечисленные после них и их эквиваленты, а также дополнительные объекты. Если не указано иное, термины "установлен", "соединен", ""поддерживается" и "связан" и их варианты используются в широком смысле и охватывают как прямые, так и косвенные установки, соединения, опоры и связи.
[0010] Кроме того, следует понимать, что варианты изобретения могут включать аппаратные средства, программные средства и электронные компоненты или модули, которые для целей описания могут быть показаны и описаны как если бы большинство компонентов было реализовано в форме аппаратных средств. Однако специалистам из чтения подробного описания будет понятно, что по меньшей мере в одном варианте электронные аспекты изобретения могут быть реализованы в форме программных средств (напр., храниться на энергонезависимых машиночитаемых носителях) и исполняться одним или более процессорным узлом, таким как микропроцессор и/или специализированными интегральными схемами. Следует отметить, что для реализации изобретения можно использовать множество устройств, основанных на аппаратных и программных средствах, а также множество структурных компонентов. Например, "серверы" и "вычислительные устройства", упомянутые в описании, могут включать один или боле процессорный узел, один или более машиночитаемый модуль, один или более интерфейс ввода/вывода и различные соединения (напр., системной шины), соединяющие эти компоненты.
[0011] Другие аспекты изобретения будут очевидны из нижеследующего подробного описания и приложенных чертежей.
Краткое описание чертежей
[0012] Фиг. 1 - вид в перспективе длиннозабойной горнодобывающей системы.
[0013] Фиг. 2 - вид в перспективе длиннозабойной врубовой машины, входящей в горнодобывающую систему по фиг. 1.
[0014] Фиг. 3 - вид в перспективе части транспортера, входящего в горнодобывающую систему по фиг. 1.
[0015] Фиг. 4 - контроллер горнодобывающей системы по фиг. 1, по варианту настоящего изобретения.
[0016] Фиг. 5 - диаграмма, иллюстрирующая отношение между положением врубовой машины по фиг. 2 и количеством добытого материала, погруженного на транспортер по фиг. 3.
[0017] Фиг. 6 - диаграмма, иллюстрирующая способ, которым натяжение цепи меняется вместе с длиной транспортера по фиг. 3.
[0018] Фиг. 7 - процесс оптимизации горнодобывающей системы по фиг. 1.
[0019] Фиг. 8 - другой процесс оптимизации горнодобывающей системы по фиг. 1.
[0020] Фиг. 9 - другой процесс оптимизации горнодобывающей системы по фиг. 1.
Подробное описание
[0021] Настоящее изобретение относится к управлению длиннозабойной горнодобывающей системой. Длиннозабойная горнодобывающая система содержит, например, длиннозабойную врубовую машину, транспортер, например, забойный скребковый конвейер ("ЗСК") или консольный перегружатель ("КП"), и контроллер. Контроллер выполнен с возможностью приема одного или боле сигнала, связанного с характеристиками длиннозабойной горнодобывающей системы (напр., положением врубовой машины, нагрузкой транспортера и т.п.) и определения производительности этой горнодобывающей системы на основе этих характеристик. Контроллер далее выполнен с возможностью управления скоростью врубовой машины и/или скоростью транспортера на основе производительности горнодобывающей системы. Скорость врубовой машины и/или скорость транспортера можно регулировать или изменять для увеличения производительности горнодобывающей системы, не перегружая транспортер или врубовую машину. Для описательных целей изобретение описывается по существу в отношении транспортеров.
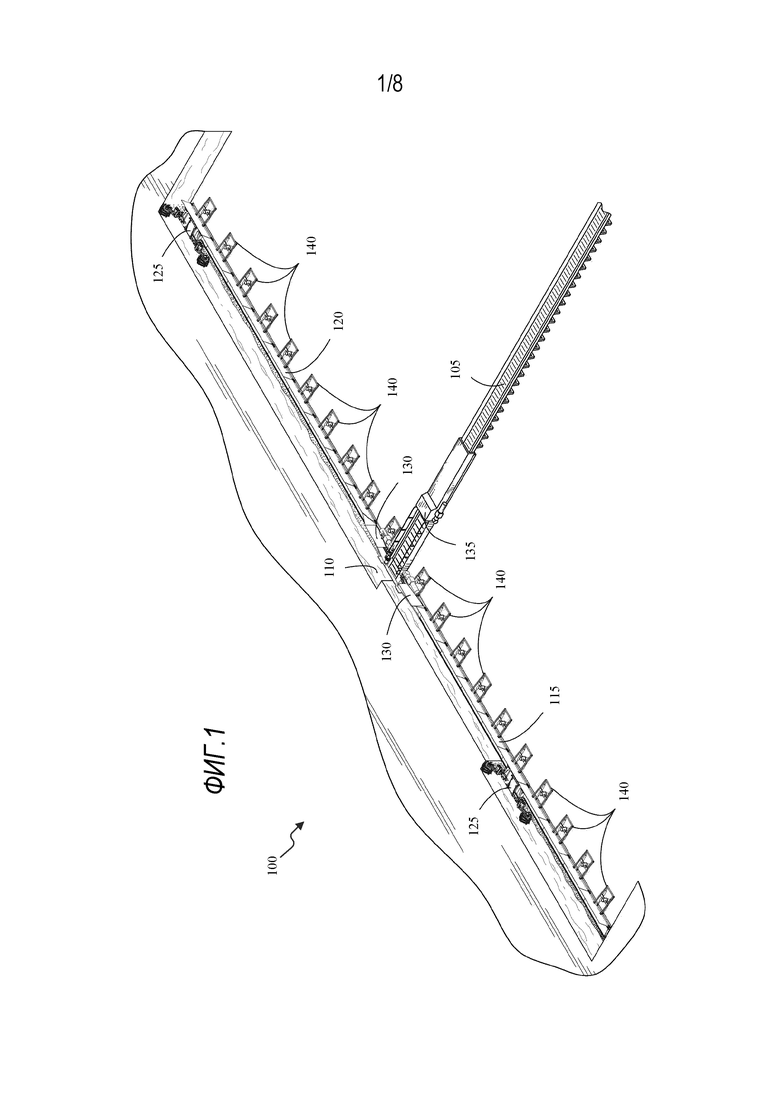
[0022] На фиг. 1 показана длиннозабойная горнодобывающая система 100. Горнодобывающая система 100 содержит разгрузочный транспортер 105, проходящий от очистного забоя 110. Вдоль очистного забоя 110 проходят два транспортера 115 и 120. На транспортерах 115 и 120 установлены длиннозабойные врубовые машины 125 для движения в боковом направлении по существу параллельно очистному забою 110. Транспортеры 115 и 120 содержат приводной конец, определяющий разгрузочный участок 130, расположенный рядом с разгрузочным транспортером 105. Разгрузочный транспортер 105 содержит дробилку 135 для уменьшения размеров добытого материала для дальнейшей переработки и хранения. Устройства 140 перемещения транспортеров выполнены с возможностью для перемещения транспортеров 115 и 120 к очистному забою 110. В некоторых вариантах длиннозабойная горнодобывающая система 100 применяется для подземной добычи и, далее, содержит множество механизированных крепей (не показаны).
[0023] Как показано на фиг. 2, каждая длиннозабойная врубовая машина 125 содержит по существу прямоугольное шасси 200 и пару шарнирно установленных рычагов 205, на каждом из которых установлен узел 210 фрезы. Рычаги 205 шарнирно соединены с противоположными концами шасси 200 и поворачиваются приводами 215, установленными между рычагами 205 и шасси 200. Каждый рычаг 205 поддерживает двигатель 220 фрезы, выполненный с возможностью привода узла 210 фрезы. Узел 210 фрезы выполнен по существу цилиндрическим и содержит первую режущую поверхность 225 для удаления материала из очистного забоя 110, когда длиннозабойная врубовая машина 125 движется по существу параллельно очистному забою 110, и вторую режущую поверхность 230, определенную торцевой поверхностью узла 210 фрезы для удаления материала из очистного забоя 110, когда длиннозабойная врубовая машина 125 движется по существу нормально к очистному забою 110. Первая режущая поверхность 225 может быть по существу цилиндрической, а вторая режущая поверхность 230 может быть по существу круглой, кольцевой, конической или имеющей форму усеченного конуса, в зависимости от, помимо прочего, типа материала, который должны срезать режущие поверхности 225, 230. И первая, и вторая режущие поверхности 225, 230 могут быть снабжены множеством режущих зубьев 235 разных конфигураций для удаления материала из очистного забоя 110. В показанном варианте зубья 235 установлены и на первую, и на вторую режущи поверхности 225, 230.
[0024] Длиннозабойная врубовая машина 125 также содержит пару внутренних опорных ножек 240 и пару наружных опорных ножек 245 (на фиг. 2 видна только одна наружная опорная ножка). Внутренние и наружные опорные ножки 240, 245 сконфигурированы или выполнены с возможностью установки на транспортеры 115, 120 так, чтобы длиннозабойная врубовая машина 125 могла двигаться вбок вдоль транспортеров 115, 120 от точки 130 разгрузки к возвратному концу транспортеров 115, 120 и обратно. Длиннозабойная врубовая машина 125 приводится в действие приводным механизмом (напр., электродвигателем с регулируемой частотой вращения) для перемещения вдоль транспортеров 115, 120.
[0025] На фиг. 3 показан участок длиннозабойного транспортера 300, аналогичного транспортерам 115, 120 по фиг. 1. Транспортер 300 содержит возвратный конец 305, транспортирующий элемент или цепь 310, движущуюся между возвратным концом и разгрузочным участком 130 (см. фиг. 1), и узел 315 датчика, расположенный рядом с концевой станцией 305. Цепь 310 приводится в движение приводным механизмом, например, электродвигателем с регулируемой частотой вращения, соединенным с разгрузочным участком 130. Концевая станция 305 содержит раму 320, цепное колесо или натяжной вал 325, установленный на раме 320, и по меньшей мере один гидравлический цилиндр (не показан). Рама 320 движется относительно разгрузочного участка 130 за счет выдвижения и втягивания гидравлического цилиндра. Цепь 310 проходит вокруг натяжного вала 325 для движения непрерывной петлей между разгрузочным участком 130 и концевой станцией 305. Цепь 310 содержит множество скребковых элементов 330, установленных на цепи 310 и разнесенных друг от друга на первое расстояние в направлении движения 335 цепи 310.
[0026] На фиг. 4 показан контроллер 400, соединенный с горнодобывающей системой 100. Контроллер 400 соединен с множеством дополнительных модулей или компонентов, таких как модуль 405 пользовательского интерфейса, один или боле индикатор 410, модуль 415 источника питания один или более датчик 420, модуль 425 параметров врубовой машины, модуль 430 параметров транспортера, хранилище или база данных 435, первый приводной механизм и привод 440 (напр., соединенный с одной или более врубовой машиной 125), и второй приводной механизм и привод 445, (напр., соединенный с одним или более транспортером 300). В некоторых вариантах первый приводной механизм и привод 440 содержит первый двигатель и привод первого двигателя, а второй приводной механизм и привод 445 содержит второй двигатель и привод второго двигателя. В некоторых вариантах каждый из первого двигателя и привода первого двигателя 440 и второго двигателя и привода второго двигателя 445 содержат узлы регулирования частоты вращения. В настоящем документе приводится описание вариантов изобретения, относящееся к приводным механизмам и приводам, которые являются двигателями и приводами двигателей.
[0027] Один или более датчик 420, например, является датчиком, сконфигурированным или выполненным с возможностью измерения или определения характеристики врубовой машины 125 (например, положения врубовой машины, скорости врубовой машины и т.п.), датчиком, сконфигурированным или выполненным с возможностью измерения или определения характеристики транспортера 300 (напр., положения цепи, скорости цепи, натяжения цепи и т.п.), силовым преобразователем в длиннозабойной горнодобывающей системе 100, сконфигурированным или выполненным с возможностью измерения или определения электрической характеристики (напр., тока, напряжения, коэффициента мощности, скорости, входной мощности, выходной мощности и т.п.), датчиком силы или датчиком (напр., тензодатчиком, штифтом нагрузки и т.п.) выполненным с возможностью генерирования сигнала, относящегося к нагрузке транспортера, и пр. В некоторых вариантах транспортер содержит множество узлов датчиков нагрузки в разных местах на транспортере для генерирования множества сигналов, относящихся к нагрузке транспортера. В этом случае нагрузку транспортера можно определить на основе суммы или среднего от измерений узлов датчиков нагрузки. В некоторых вариантах узлы датчиков аналогичны описанным в патенте US 8,931,628 под названием "AUTOMATED FACE CONVEYOR CHAIN TENSION LOAD SENSOR IN CHAIN TENSION PLATE" ("Датчик натяжения цепи в натяжной пластине автоматизированного забойного транспортера"), все содержащие которого включено в настоящее описание путем отсылки. В другом варианте узлы датчиков могут быть аналогичны описанным в патенте US 8,636,140 под названием "CHAIN TENSION SENSOR" ("Датчик натяжения цепи"), все содержание которого включено в настоящее описание путем отсылки.
[0028] Контроллер 400 содержит комбинацию аппаратных и программных средств, предназначенных, помимо прочего, для определения производительности горнодобывающей системы 100, управления работой горнодобывающей системы 100, активации одного или более индикаторов 410 (напр., жидкокристаллического дисплея), мониторинга работы горнодобывающей системы 100 и пр. В некоторых вариантах контроллер 400 содержит множество электрических и электронных компонентов и модулей внутри контроллера 400 и/или горнодобывающей системы 100. Например, контроллер 400 содержит, помимо прочего, процессорный узел 450 (напр., микропроцессор или другое подходящее программируемое устройство), запоминающее устройство 455, узлы 460 ввода и узлы 465 вывода. Процессорный узел 450 содержит, помимо прочего, управляющий узел 470, арифметическое логическое устройство ("АЛУ") 475, и множество регистров 480 (на фиг. 4 показаны как группа регистров) и реализован с применением известной компьютерной архитектуры, такой как модифицированная гарвардская архитектура, архитектура фон Неймана и т.п. Процессорный узел 450, запоминающее устройство 455, узлы 460 ввода и узлы 465 вывода, а также различные модули, соединенные с контроллером 400, соединены одной или более управляющей шиной и/или шиной данных (напр., общей шиной 485). Управляющая шина и/или шина данных показаны на фиг. 4 для целей иллюстрации. Применение одной или боле управляющей шины и/или шины данных для соединения между собой различных модулей и компонентов и для связи между ними известно специалистам. В некоторых вариантах контроллер 400 реализован частично или полностью на полупроводниковой микросхеме, является перепрограммируемой пользователем вентильной матрицей ("ППВМ"), специализированной интегральной микросхемой и т.п.
[0029] Запоминающее устройство 455 содержит, например, область хранения программ и область хранения данных. Область хранения программ и область хранения данных могут включать комбинации разных типов запоминающих устройств, таких как постоянное запоминающее устройство ("ПЗУ"), оперативное запоминающее устройство ("ОЗУ") (например, динамическое ОЗУ ("ДОЗУ"), синхронное ДОЗУ ("СДОЗУ") и т.д.), электрически стираемое программируемое ПЗУ ("ЭСППЗУ"), флэш-память, жесткий диск, SD-карту или другие подходящие магнитные, оптические, физические или электронные запоминающие устройства или структуры данных. Процессорный узел 450 соединен с запоминающим устройством 455 и исполняет программные команды, которые могут храниться в ОЗУ запоминающего устройства 455 (например, во время исполнения), ПЗУ запоминающего устройства 455 (например, на постоянной основе) или другом энергонезависимом машиночитаемом носителе, таком как другое запоминающее устройство или диск. Программные средства, включенные в реализацию горнодобывающей системы 100, могут храниться в запоминающем устройства 455 контроллера 400. Эти программные средства включают, например, микропрограммы, одну или боле прикладную программу, программные данные, фильтры, правила, один или более программный модуль, и другие исполняемые команды. Контроллер 400 сконфигурирован или выполнен с возможностью выборки из запоминающего устройства и исполнения, помимо прочего, команд, относящихся к процессам и способам управления, описанным в настоящем документе. В других конструкциях контроллер 400 содержит дополнительные или другие компоненты или меньшее количество компонентов.
[0030] Модуль 425 параметров врубовой машины соединен ли связан с одной или боле врубовой машиной 125, которая приводится в действие первым приводным механизмом и приводом 440. Модуль 425 параметров врубовой машины сконфигурирован или выполнен с возможностью приема сигналов, связанных с одним или более параметром (напр., положение врубовой машины, скорость врубовой машины, частота вращения двигателя, ток на двигателе, напряжение на двигателе, входная мощность и т.п.) одной или более врубовой машины 125. В некоторых вариантах модуль 425 параметров врубовой машины генерирует сигналы, связанные с параметрами врубовой машины. В других вариантах модуль 425 параметров врубовой машины содержит один или боле датчик 420 или соединен с ним и принимает сигналы от одного или более датчика 420, связанным с параметром врубовой машины.
[0031] Модуль 430 параметров транспортера соединен или связан с одним или боле транспортером 300, который приводится в действие вторым приводным механизмом и приводом 445. Модуль 430 параметров транспортера сконфигурирован или выполнен с возможностью приема сигналов, связанных с одним или более параметром транспортера (напр., нагрузка или загрузка транспортера, скорость транспортера, частота вращения двигателя, ток на двигателе, напряжение на двигателе, входная мощность и т.п.). В некоторых вариантах модуль 430 параметров транспортера генерирует сигналы, относящиеся к параметрам транспортера. В других вариантах модуль 430 параметров транспортера содержит один или боле датчик 420 или соединен с ним и принимает сигналы от одного или более датчика 420, относящиеся к параметрам транспортера.
[0032] Двигателями 440, 445 управляют управляющие сигналы, получаемые от контроллера 400 или другого подсоединенного контроллера. Двигатели 440, 445 также соединены с редукторами для понижения частоты вращения двигателей 440, 445 до частоты, пригодной для врубовой машины 125 и транспортера. В некоторых вариантах контроллер 400 сконфигурирован или выполнен с возможностью управления двигателями 440, 445 и горнодобывающей системой 100 автономно, используя датчики 420 и одну или более хранящуюся программу или модуль. В других вариантах контроллер 400 сконфигурирован и выполнен с возможностью управления двигателями 440, 445 и горнодобывающей системой 100 на основе комбинаций ручного ввода и автоматического управления.
[0033] Модуль 405 пользовательского интерфейса применяется для управления и мониторинга врубовой машины 125, транспортера 300 и/или горнодобывающей системы 100. Например, модуль 405 пользовательского интерфейса оперативно соединен с контроллером 400 для управления скоростью врубовой машины 125, скоростью транспортера 300, частотой вращения двигателей 440, 445 и т.п. Модуль 405 пользовательского интерфейса может содержать комбинацию цифровых и аналоговых устройств ввода и вывода, необходимых для достижения требуемого уровня управления и мониторинга горнодобывающей системы 100. Например, модуль 405 пользовательского интерфейса может содержать дисплей и устройства ввода, такие как сенсорный экран, одну или боле рукоятку, шкалы, переключатели, кнопки и пр. Дисплей, например, является жидкокристаллическим дисплеем, светодиодным дисплеем, дисплеем на органических светодиодах, электролюминесцентным дисплеем, дисплеем с люминофором на основе эффекта эмиссии электронов с поверхностной проводимостью, дисплеем с автоэлектронной эмиссией, жидкокристаллическим дисплеем с тонкопленочными транзисторами и т.д. В других вариантах дисплей является активной матрицей на органических светодиодах. Модуль 405 пользовательского интерфейса также может быть сконфигурирован или выполнен с возможностью отображения условий и данных, связанных с горнодобывающей системой 100 в реальном или по существу реальном масштабе времени. Например, модуль 405 пользовательского интерфейса сконфигурирован или выполнен с возможностью отображения измеренных характеристик горнодобывающей системы 100 (напр., врубовой машины 125, транспортера 300 и пр.), статуса горнодобывающей системы 100, состояние отказов (напр, провисание цепи, нулевое натяжение цепи и пр.), количества добытого материала на транспортере 300 и пр. В некоторых вариантах модуль 405 пользовательского интерфейса управляется в сочетании с одним или более индикатором 410 (напр., светодиодным) для визуальной индикации состояния или статуса горнодобывающей системы 100.
[0034] Хотя на фиг. 4 показан единственный контроллер 400, в других конструкциях контроллер 400 может быть разделен на множество контроллеров. Например, контроллер 400 может быть разделен на консолидированное управляющее устройство ("КУУ"), программируемое управляющее устройство ("ПУУ") и пр. КУУ может находиться во взрывозащищенном кожухе и управлять системой транспортера. ПУУ является конструктивно безопасной системой, которую можно стыковать с КУУ для, помимо прочего, остановки, запрета, отключения и т.п. работы транспортера.
[0035] Как было указано выше, в некоторых вариантах контроллер 400 сконфигурирован или выполнен с возможностью управления скоростью одной или более врубовой машины 125 на основе полноты использования (т.е., близко к 100%) горнодобывающей системы 100. Контроллер 400 также сконфигурирован или выполнен с возможностью приема сигналов от одного или более датчика 420, связанного с двигателями 440, 445, врубовой машиной 125, транспортером 300 или другими компонентами горнодобывающей системы 100. Сигналы от датчиков 420 связаны, например, с положением врубовой машины 125, нагрузкой транспортера 300 и т.д. Затем контроллер 400 обрабатывает и анализирует сигналы для определения производительности горнодобывающей системы 100. Производительность горнодобывающей системы является мерой продуктивности длиннозабойной горнодобывающей системы 10 и может измеряться в тоннах (напр., добытого материала) в единицу времени (напр., в минуту, час и пр.). Производительность горнодобывающей системы зависит, помимо прочего, от количества добытого материала, извлеченного из очистного забоя 110 врубовыми машинами 125, от количества добытого материала, погруженного на транспортер 300 и от скорости врубовой машины 125. В некоторых вариантах контроллер 400 определяет, оптимизирована ли производительность горнодобывающей системы 100, сравнивая производительность горнодобывающей системы с заранее определенной пороговой величиной, например, максимально возможной производительностью горнодобывающей системы 100. Заранее определенная пороговая величина, например, составляет 90-100% от максимальной (безопасной) производительности горнодобывающей системы 100 (напр., производительность, которая не перегружает транспортер 300 или врубовые машины 125). Контроллер 400 затем управляет скоростью врубовой машины 125 на основе сравнения производительности с пороговой величиной. В некоторых вариантах контроллер 400 управляет скоростью врубовой машины 125 на основе функции, связанной с производительностью горнодобывающей системы 100. В других вариантах контроллер 400 управляет скоростью врубовой машины 125 на основе величины в справочной таблице, связанной с производительностью горнодобывающей системы 100. Скоростью врубовой машины может быть скорость, с которой врубовая машины движется вдоль транспортера 300 и/или частота, с которой вращаются узлы фрез.
[0036] Дополнительно или альтернативно, контроллер 400 сконфигурирован или выполнен с возможностью управления скоростью одного или более транспортера 300 на основе полноты (т.е., близко к 100%) нагрузки горнодобывающей системы 100. Контроллер 400 также сконфигурирован или выполнен с возможностью приема сигналов от одного или боле датчика, связанного с двигателями 440, 445, врубовой машиной 125, транспортером 300 или другими компонентами горнодобывающей системы 100. Сигналы от датчиков 420 связаны, например, с положением врубовой машины 125, нагрузкой транспортера 300 и пр. Контроллер 400 затем обрабатывает и анализирует сигналы для определения производительности горнодобывающей системы 100. Производительность горнодобывающей системы 100 является мерой продуктивности горнодобывающей системы 100 и может измеряться в тоннах (напр., добытого материала) в единицу времени (напр., в минуту, час и пр.). Производительность горнодобывающей системы зависит, помимо прочего, от количества добытого материала, извлеченного из очистного забоя 110 врубовыми машинами 125, от количества добытого материала, погруженного на транспортер 300 и от скорости врубовой машины 125. В некоторых вариантах контроллер 400 определяет, оптимизирована ли производительность горнодобывающей системы 100, сравнивая производительность горнодобывающей системы с заранее определенной пороговой величиной, например, с максимальной производительностью, возможной для горнодобывающей системы 100. Заранее определенная пороговая величина, например, составляет 90-100% от максимальной (безопасной) производительности горнодобывающей системы 100 (напр., производительность, которая не перегружает транспортер 300 или врубовые машины 125). Контроллер 400 затем управляет скоростью транспортера 300 на основе сравнения производительности с пороговой величиной. В некоторых вариантах контроллер 400 управляет скоростью транспортера 300 на основе функции, связанной с производительностью горнодобывающей системы 100. В других вариантах контроллер 400 управляет скоростью транспортера 300 на основе величины в справочной таблице, связанной с производительностью горнодобывающей системы 100.
[0037] Производительность горнодобывающей системы 100 является мерой продуктивности горнодобывающей системы 100. Во время работы производительность горнодобывающей системы предпочтительно приближается, насколько возможно, к максимально возможной производительности горнодобывающей системы 100 на основе добытого материала, условий добычи, конфигурации системы и пр. Производительность горнодобывающей системы 100 в любой данный момент времени можно выразить как процент (%) от максимальной производительности горнодобывающей системы 100. Как таковая длиннозабойная горнодобывающая система имеет наивысшую производительность и максимальное использование, когда производительность горнодобывающей системы приближается к 100% от максимальной производительности (напр., 90-100%). Если производительность горнодобывающей системы меньше максимальной, контроллер 400 регулирует (напр., увеличивает) скорость врубовой машины 125 и/или транспортера 300 для увеличения производительности горнодобывающей системы 100.
[0038] Производительность горнодобывающей системы 100 определяется на основе положения врубовой машины 125 и/или нагрузки (напр., добытый материал, потребляемая мощность и пр.) на транспортер 200. На фиг. 5 и 6 показано отношение между положением врубовой машины 125 и количеством добытого материала на транспортере 300, и натяжением цепи 310 транспортера (которое связано с нагрузкой транспортера, потребляемой транспортером мощностью и пр.). Более конкретно, на фиг. 5 показана диаграмма 600, которая иллюстрирует отношение между положением врубовой машины 125 и количеством добытого материала, погруженного на транспортер (т.е., в тоннах на метр ("т/м")) и это отношение показано во времени (т.е., в минутах) по оси х системы координат. Положение врубовой машины 125 показано в процентах (%) очистного забоя 110 (т.е., между началом и хвостом очистного забоя 110). Например, если врубовая машины 125 расположена на крайнем дальнем конце горнодобывающей системы 100 (т.е., в хвосте забоя) процент положения врубовой машины будет равен 100% (т.е., относительно всего диапазона движения врубовой машины 125 вдоль очистного забоя). Когда положение врубовой машины 125 приближается к 100%, количество добытого материала, погруженного на транспортер 300, также увеличивается относительно положения врубовой машины 125. Поэтому, производительность горнодобывающей системы 100 связана с положением врубовой машины 125 вдоль очистного забоя 110 и это положение врубовой машины можно использовать для определения и/или прогнозирования производительности горнодобывающей системы 100.
[0039] Аналогично, на фиг. 6 представлена диаграмма 700 натяжений (т.е., в тоннах) в разных положениях цепи 310 относительно времени. Например, диаграмма 700 включает натяжение верхней ветви в начале забоя, натяжение верхней ветви в хвосте забоя, натяжение нижней ветви в начале забоя и натяжение нижней ветки в хвосте забоя. Эти натяжения приведены в тоннах и также связаны с положением врубовой машины 125 и нагрузкой транспортера 300 (напр., количеством добытого материала, погруженным на транспортер 300). По сравнению с фиг. 5, когда количество добытого материала, погруженного на транспортер 300, увеличивается, натяжение цепи 310 увеличивается. Аналогично, когда положение врубовой машины 125 увеличивается, натяжение цепи 310 увеличивается. В некоторых вариантах для определения нагрузки транспортера 300 используют совокупное натяжение цепи 310, среднее натяжение цепи 310 и/или натяжение цепи 310 в конкретном месте. В других вариантах совокупное натяжение цепи 310, среднее натяжение цепи 310 и натяжение цепи 310 в конкретном месте считается как представляющее нагрузку транспортера 300. Нагрузка транспортера 300 и/или положение врубовой машины 125, таким образом, можно использовать для определения производительности горнодобывающей системы 100.
[0040] Процессы 800, 900 и 1000 связаны с определением производительностью горнодобывающей системы 100 и управлением скоростью врубовой машины 125 и/или транспортера 300 на основе производительности горнодобывающей системы 100 и в этом качестве описываются ниже. Различные описываемые этапы процессов 800, 900 и 1000 могут выполняться одновременно, параллельно или в порядке, который отличается от описанного последовательного порядка выполнения. Процессы 800, 900 и 1000 также могут выполняться с меньшим количеством этапов, чем показано в иллюстративном варианте. Дополнительно, контроллер 400 выполнен с возможностью выполнять процессы 800, 900 и 1000 одновременно или в тандеме с другими процессами.
[0041] На фиг. 7 показано процесс 800 управления горнодобывающей системой 100. На этапе 805 контроллер 400 получает первый сигнал, относящийся к положению врубовой машины 125. Контроллер 400 сконфигурирован или выполнен с возможностью определения или расчета величины для положения врубовой машины 125, например, как процент (%) от положения вдоль очистного забоя 110 (этап 810). На этапе 815 контроллер 400 получает второй сигнал, относящийся к нагрузке транспортера 300. Контроллер 400 сконфигурирован или выполнен с возможностью определения или расчета величины нагрузки транспортера 300 в единицах=тонн на метр (этап 820).
[0042] На этапе 825 контроллер 400 определяет или рассчитывает производительность горнодобывающей системы 100 на основе характеристик, определенных на этапе 810 (т.е., положения врубовой машины 125) и на этапе 820 (т.е., нагрузки транспортера 300). Производительность горнодобывающей системы 100 можно рассчитать, например, определяя, сколько тонн добытого материала врубовая машина 125 удаляет во время бокового движения вдоль очистного забоя 110, сколько тонн добытого материала транспортер 300 перемещает к разгрузочному участку 130 в единицу времени (напр., минут, часов и пр.), и т.д. На этапе 830 контроллер 400 анализирует производительность горнодобывающей системы 100. В одном варианте контроллер 400 сконфигурирован или выполнен с возможностью сравнения производительности горнодобывающей системы с заранее определенной пороговой величиной. Заранее определенная пороговая величина, например, является максимальной производительностью горнодобывающей системы 100. Как описано выше, производительность горнодобывающей системы можно описать как процент (%) от максимальной производительности горнодобывающей системы 100. Дополнительно или альтернативно, контроллер 400 может анализировать производительность горнодобывающей системы, используя функцию и/или справочную таблицу, относящуюся к производительности горнодобывающей системы 100 (например, текущая производительность горнодобывающей системы является входной информацией для функции или справочной таблицы, и функция или справочная таблица выдает необходимые управляющие сигналы или параметры). На основе анализа производительности горнодобывающей системы 100 контроллер 400 сконфигурирован или выполнен с возможностью управления скоростью врубовой машины 125 (этап 835) и скоростью транспортера 300 (этап 840). Например, контроллер 400 может увеличить частоту вращения двигателя 440, приводящего врубовую машину 125 для увеличения количества добытого материала, удаляемого из очистного забоя 110. Контроллер 400 также может увеличить частоту вращения двигателя 445, приводящего транспортер 300 для увеличения скорости транспортера 300 и количества добытого материала, транспортируемого из очистного забоя 110. Процесс 800 может выполняться непрерывно во время работы горнодобывающей системы 100 для постоянной регулировки или изменения скорости врубовой машины 125 и транспортера 300 для доведения продуктивности горнодобывающей системы 100 до максимума. В некоторых вариантах производительность горнодобывающей системы 100 не определяется и положение врубовой машины 125 и нагрузка транспортера 300 используются для непосредственного управления скоростью врубовой машины 125 и транспортера 300.
[0043] На фиг. 8 показан процесс 900 управления горнодобывающей системой 100. На этапе 905 контроллер 400 принимает первый сигнал, относящийся к положению врубовой машины 125. Контроллер 400 сконфигурирован или выполнен с возможностью определения или расчета величины для положения врубовой машины 125, например, как процент (%) положения вдоль очистного забоя 110 (этап 910). На этапе 915 контроллер 400 принимает второй сигнал, относящийся к нагрузке транспортера 300. Контроллер 400 сконфигурирован или выполнен с возможностью определения или расчета величины для нагрузки транспортера 300, например, в тоннах на метр (этап 920).
[0044] На этапе 925 контроллер 400 определяет или рассчитывает производительность горнодобывающей системы 100 на основе характеристик, определенных на этапе 910 (т.е., положения врубовой машины 125) и на этапе 920 (т.е., нагрузки транспортера 300). Производительность горнодобывающей системы 100 можно рассчитать, например, определяя, сколько тонн добытого материала врубовая машина удаляет во время бокового движения вдоль очистного забоя 110, сколько тонн добытого материала транспортер 300 перемещает к разгрузочному участку 130 в единицу времени (напр., минуту, час и пр.), и т.д. На этапе 930 контроллер 400 анализирует производительность горнодобывающей системы 100. В одном варианте контроллер 400 сконфигурирован или выполнен с возможностью сравнения производительности горнодобывающей системы с пороговой величиной. Заранее определенная пороговая величина может быть, например, максимальной производительностью горнодобывающей системы 100. Как описано выше, производительность горнодобывающей системы 100 можно описать как процент (%) от максимальной производительности горнодобывающей системы 100. Дополнительно или альтернативно, контроллер 400 может анализировать производительность горнодобывающей системы, используя функцию и/или справочную таблицу, относящуюся к производительности горнодобывающей системы 100 (например, текущая производительность горнодобывающей системы является входной информацией для функции или справочной таблицы, и функция или справочная таблица выдает необходимые управляющие сигналы или параметры). На основе анализа производительности горнодобывающей системы 100 контроллер 400 сконфигурирован или выполнен с возможностью управления скоростью врубовой машины 125 (этап 935). Например, контроллер 400 может увеличить частоту вращения двигателя 440, приводящего врубовую машины 125 для увеличения количества добытого материала, удаляемого из очистного забоя 110. Процесс 900 может выполняться непрерывно во время работы горнодобывающей системы 100 для постоянного регулирования или изменения скорости врубовой машины 125 и транспортера 300 для доведения продуктивности горнодобывающей системы 100 до максимума. В некоторых вариантах производительность горнодобывающей системы 100 не определяется и положение врубовой машины 125 и нагрузка транспортера 300 используются для непосредственного управления скоростью врубовой машины 125 и транспортера 300.
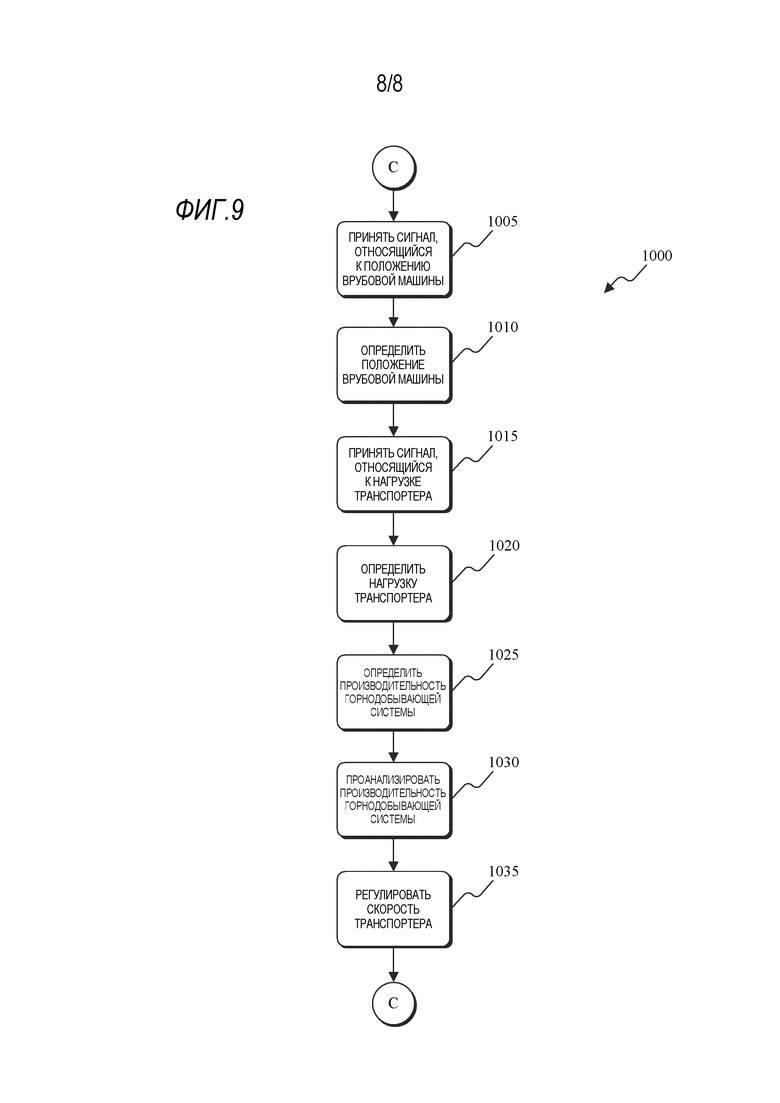
[0045] На фиг. 9 показан процесс 1000 управления горнодобывающей системой 100. На этапе 1005 контроллер 400 принимает первый сигнал, относящийся к положению врубовой машины 125. Контроллер 400 сконфигурирован или выполнен с возможностью определения или расчета величины для положения врубовой машины 125, например, как процент (%) положения вдоль очистного забоя 110 (этап 1010). На этапе 1015 контроллер 400 принимает второй сигнал, относящийся к нагрузке транспортера 300. Контроллер 400 сконфигурирован или выполнен с возможностью определения или расчета величины для нагрузки транспортера 300, например, в тоннах на метр (этап 1020).
[0046] На этапе 1025 контроллер 400 определяет или рассчитывает производительность горнодобывающей системы 100 на основе характеристик, определенных на этапе 1010 (т.е., положения врубовой машины 125) и на этапе 1020 (т.е., нагрузки транспортера 300). Производительность горнодобывающей системы 100 можно рассчитать, например, определяя, сколько тонн добытого материала врубовая машина удаляет во время бокового движения вдоль очистного забоя 110, сколько тонн добытого материала транспортер 300 перемещает к разгрузочному участку 130 в единицу времени (напр., минуту, час и пр.), и т.д. На этапе 1030 контроллер 400 анализирует производительность горнодобывающей системы 100. В одном варианте контроллер 400 сконфигурирован или выполнен с возможностью сравнения производительности горнодобывающей системы с пороговой величиной. Заранее определенная пороговая величина может быть, например, максимальной производительностью горнодобывающей системы 100. Как описано выше, производительность горнодобывающей системы 100 можно описать как процент (%) от максимальной производительности горнодобывающей системы 100. Дополнительно или альтернативно, контроллер 400 может анализировать производительность горнодобывающей системы, используя функцию и/или справочную таблицу, относящуюся к производительности горнодобывающей системы 100 (например, текущая производительность горнодобывающей системы является входной информацией для функции или справочной таблицы, и функция или справочная таблица выдает необходимые управляющие сигналы или параметры). На основе анализа производительности горнодобывающей системы 100 контроллер 400 сконфигурирован или выполнен с возможностью управления скоростью транспортера 300 (этап 1035). Например, контроллер 400 может увеличить частоту вращения двигателя 440, приводящего врубовую машины 125 для увеличения количества добытого материала, удаляемого из очистного забоя 110. Процесс 1000 может выполняться непрерывно во время работы горнодобывающей системы 100 для постоянного регулирования или изменения скорости врубовой машины 125 и транспортера 300 для доведения продуктивности горнодобывающей системы 100 до максимума. В некоторых вариантах производительность горнодобывающей системы 100 не определяется и положение врубовой машины 125 и нагрузка транспортера 300 используются для непосредственного управления скоростью врубовой машины 125 и транспортера 300.
[0047] В некоторых вариантах контроллер 400 также сконфигурирован или выполнен с возможностью выборочного включения или отключения дополнительных функций или органов управления горнодобывающей системы 100, таких как обратный толчок, погрузка змейкой, двойная змейка, автоматический скребок, множественная подача, поворот торца, и т.д., на основе нагрузки транспортера 300 и/или производительности горнодобывающей системы 100.
[0048] Например, когда врубовая машина 125 движется вдоль очистного забоя 110, транспортер 300 сдвигается к очистному забою 110, чтобы быть готовым к следующему проходу врубовой машины 125. Мощность, связанная с подачей транспортера таким образом составляет прибл. 20% от нагрузки транспортера 300. В результате повышения нагрузки при подаче транспортера 300, остается меньше мощности на транспортировку добытого материала вдоль транспортера 300. Однако возникает естественное уменьшение в количестве погруженного на транспортер 300 добытого материала (см. фиг. 5). Например, когда врубовая машина 125 достигает конца очистного забоя, эта врубовая машина должна изменить направление и выполнить другие операции, которые позволят транспортировать добытый материал на транспортере 300 без его быстрой замены, что приводит к снижению нагрузки транспортера 300, создаваемой добытым материалом. Для повышения производительности горнодобывающей системы 100 контроллер 400 в этом случае может замедлить или остановить подачу транспортера (т.е. снизить скорость подачи транспортера или запретить подачу транспортера, снизив скорость подачи до нуля, и т.п.) во время нормальной работы (напр., не в конце очистного забоя 110, а между 10% и 90% длины очистного забоя, между 20% и 80% очистного забоя и т.п.). В результате возникает дополнительная возможность загрузки транспортера, которую можно использовать для увеличения скорости врубовой машины 125 и/или скорости транспортера 300. Когда врубовая машина 125 подходит к концу очистного забоя 110 и нагрузка транспортера, создаваемая добытым материалом, снижается, контроллер 400 может разрешить подачу транспортера 300 к очистному забою 110 (например, увеличить скорость подачи транспортера).
[0049] Таким образом, согласно настоящему изобретению, помимо прочего, предлагаются системы и способы управления скоростью врубовой машины и/или транспортера в горнодобывающей системе на основе производительности этой горнодобывающей системы.






Группа изобретений относится к управлению производительностью длиннозабойной горнодобывающей системы. Технический результат – повышение производительности. Горнодобывающая система содержит врубовую машину, транспортер, первый датчик, выполненный с возможностью генерирования первого сигнала, относящегося к положению врубовой машины, второй датчик, выполненный с возможностью генерирования второго сигнала, относящегося к нагрузке транспортера, первый приводной механизм, соединенный с врубовой машиной и выполненный с возможностью привода врубовой машины, и контроллер. Контроллер выполнен с возможностью принимать первый сигнал от первого датчика, определять положение врубовой машины на основе первого сигнала, принимать второй сигнал от второго датчика, определять нагрузку транспортера на основе второго сигнала, определять производительность горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера, и управлять скоростью врубовой машины на основе производительности горнодобывающей системы. 5 н. и 30 з.п. ф-лы, 9 ил.
1. Горнодобывающая система, содержащая:
врубовую машину,
транспортер,
первый датчик, выполненный с возможностью генерирования первого сигнала, относящегося к положению врубовой машины;
второй датчик, выполненный с возможностью генерирования второго сигнала, относящегося к нагрузке транспортера;
первый приводной механизм, соединенный с врубовой машиной и выполненный с возможностью привода врубовой машины, и
контроллер, выполненный с возможностью:
принимать первый сигнал от первого датчика;
определять положение врубовой машины на основе первого сигнала;
принимать второй сигнал от второго датчика;
определять нагрузку транспортера на основе второго сигнала;
определять производительность горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера, и
управлять скоростью врубовой машины на основе производительности горнодобывающей системы.
2. Система по п. 1, содержащая также второй приводной механизм, соединенный с транспортером и выполненный с возможностью привода транспортера, при этом контроллер также выполнен с возможностью управления скоростью транспортера на основе производительности горнодобывающей системы.
3. Система по п. 1, в которой контроллер также выполнен с возможностью сравнения производительности горнодобывающей системы с заранее заданной пороговой величиной и управления скоростью врубовой машины на основе сравнения производительности с заранее заданной пороговой величиной.
4. Система по п. 3, в которой заранее заданная пороговая величина является максимальной производительностью горнодобывающей системы.
5. Система по п. 1, в которой первый датчик является датчиком положения.
6. Система по п. 1, в которой второй датчик является датчиком нагрузки.
7. Система по п. 1, в которой первый приводной механизм включает двигатель.
8. Система по п. 7, в которой скоростью врубовой машины управляют, управляя частотой вращения двигателя.
9. Способ управления производительностью горнодобывающей системы, содержащий этапы, на которых:
принимают на процессоре первый сигнал, связанный с положением врубовой машины;
определяют с помощью процессора положение врубовой машины на основе первого сигнала;
принимают на процессоре второй сигнал, связанный с нагрузкой транспортера;
определяют с помощью процессора нагрузку транспортера на основе второго сигнала;
определяют с помощью процессора производительность горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера; и
управляют скоростью врубовой машины на основе производительности горнодобывающей системы.
10. Способ по п. 9, содержащий также этап, на котором управляют скоростью транспортера на основе производительности горнодобывающей системы.
11. Способ по п. 9, содержащий также этап, на котором с помощью процессора сравнивают производительность горнодобывающей системы с заранее заданной пороговой величиной и управляют скоростью врубовой машины на основе сравнения производительности с заранее заданной пороговой величиной.
12. Способ по п. 11, в котором заранее заданная пороговая величина является максимальной производительностью горнодобывающей системы.
13. Способ по п. 9, в котором первый сигнал генерирует датчик положения.
14. Способ по п. 9, в котором второй сигнал генерирует датчик нагрузки.
15. Способ по п. 9, в котором датчик нагрузки является тензодатчиком.
16. Способ по п. 9, в котором приводной механизм содержит электродвигатель с регулируемой частотой вращения.
17. Горнодобывающая система, содержащая:
врубовую машину,
транспортер,
первый датчик, выполненный с возможностью генерирования первого сигнала, относящегося к положению врубовой машины;
второй датчик, выполненный с возможностью генерирования второго сигнала, относящегося к нагрузке транспортера;
первый приводной механизм, соединенный с врубовой машиной и выполненный с возможностью привода врубовой машины, и
контроллер, выполненный с возможностью:
принимать первый сигнал от первого датчика;
определять положение врубовой машины на основе первого сигнала;
принимать второй сигнал от второго датчика;
определять нагрузку транспортера на основе второго сигнала;
определять производительность горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера, и
управлять скоростью транспортера на основе производительности горнодобывающей системы.
18. Система по п. 17, содержащая также второй приводной механизм, соединенный с транспортером и выполненный с возможностью привода транспортера и в которой контроллер далее выполнен с возможностью управлять скоростью транспортера на основе производительности горнодобывающей системы.
19. Система по п. 17, в которой контроллер также выполнен с возможностью сравнения производительности горнодобывающей системы с заранее определенной пороговой величиной и управления скоростью транспортера на основе сравнения производительности с заранее определенной пороговой величиной.
20. Система по п. 19, в которой заранее заданная пороговая величина является максимальной производительностью горнодобывающей системы.
21. Система по п. 17, в которой первый датчик является датчиком положения.
22. Система по п. 17, в которой второй датчик является датчиком нагрузки.
23. Система по п. 17, в которой первый приводной механизм включает двигатель.
24. Система по п. 23, в которой скоростью транспортера управляют, управляя частотой вращения двигателя.
25. Система по п. 17, в которой скорость транспортера является скоростью подачи транспортера к очистному забою.
26. Способ управления производительностью горнодобывающей системы, содержащий этапы, на которых:
принимают на процессоре первый сигнал, связанный с положением врубовой машины;
определяют с помощью процессора положение врубовой машины на основе первого сигнала;
принимают на процессоре второй сигнал, связанный с нагрузкой транспортера;
определяют с помощью процессора нагрузку транспортера на основе второго сигнала;
определяют с помощью процессора производительность горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера; и
управляют скоростью транспортера на основе производительности горнодобывающей системы.
27. Способ по п. 26, содержащий также этап, на котором управляют скоростью врубовой машины на основе производительности горнодобывающей системы.
28. Способ по п. 26, содержащий также этап, на котором с помощью процессора сравнивают производительность горнодобывающей системы с заранее заданной пороговой величиной и управляют скоростью транспортера на основе сравнения производительности с заранее заданной пороговой величиной.
29. Способ по п. 28, при котором заранее заданной пороговая величина является максимальной производительностью горнодобывающей системы.
30. Способ по п. 26, при котором первый сигнал генерирует датчик положения.
31. Способ по п. 26, при котором второй сигнал генерирует датчик нагрузки.
32. Способ по п. 26, при котором датчик нагрузки является тензодатчиком.
33. Способ по п. 32, при котором приводной механизм содержит электродвигатель с регулируемой частотой вращения.
34. Способ по п. 26, при котором скорость транспортера является скоростью подачи транспортера к очистному забою.
35. Контроллер, содержащий процессор и запоминающее устройство, при этом контроллер в запоминающем устройстве содержит исполняемые команды для:
определения положения врубовой машины на основе первого сигнала, связанного с положением врубовой машины;
определения нагрузки транспортера на основе второго сигнала, связанного с нагрузкой транспортера;
определения производительности горнодобывающей системы на основе положения врубовой машины и нагрузки транспортера; и
управления по меньшей мере одной из скорости врубовой машины и скорости транспортера на основе производительности горнодобывающей системы.
| US 20110254346 A1, 20.10.2011 | |||
| АДАПТИВНОЕ РЕГУЛИРОВАНИЕ ПРИВОДА ФРЕЗЕРНОЙ МАШИНЫ | 2011 |
|
RU2468141C2 |
| US 3988578 A1, 26.10.1976 | |||
| US 4753484 A1, 28.06.1988 | |||
| US 4822105 A1, 18.04.1989 | |||
| DE 4021302 A, 16.01.1992. | |||

