Сталкиватель верхнего ряда изделий, закрепленный над секционированной емкостью, выполнен в виде перемещающейся по поперечным направляющим приводам 9 каретки 10. Каретка 10 выполнена из двух частей - ползуна 11, перемещаемого по направляющим 8, исхвата 12, закрепленного на штоках 13 гидроцилиндров 14, Схват 12 выполнен в виде продольного паза ширит ной в длину изделия 2 и длиной не менее длины секций контейнеров 3-6, у которого по крайней мере одна стенка 15 выполнена подвижной и управляемой, например электромагнитом 16. Сталкиватель используется для подачи изделий 2 на продольный конвейер 17 с бесконечным элементом. С конвейера изделия поступают на желоб 18, закрепленный шарнирно с возможностью поворота в продольной и вертикальной плоскостях. Угол наклона желоба 18 регулируется приводом 19, а его часть, соприкасающаяся с кабелем для обеспечения постоянного соприкосновения с ним, закреплена на остальной части желоба посредством шарнира 20 и может свободно поворачиваться вокруг него. Привод 9 каретки 10 может быть тросовым, состоящим из троса 21, ведомого барабана 22 и ведущего барабана 23, вращаемого, например через червячный редуктор 24 двигателя 25.
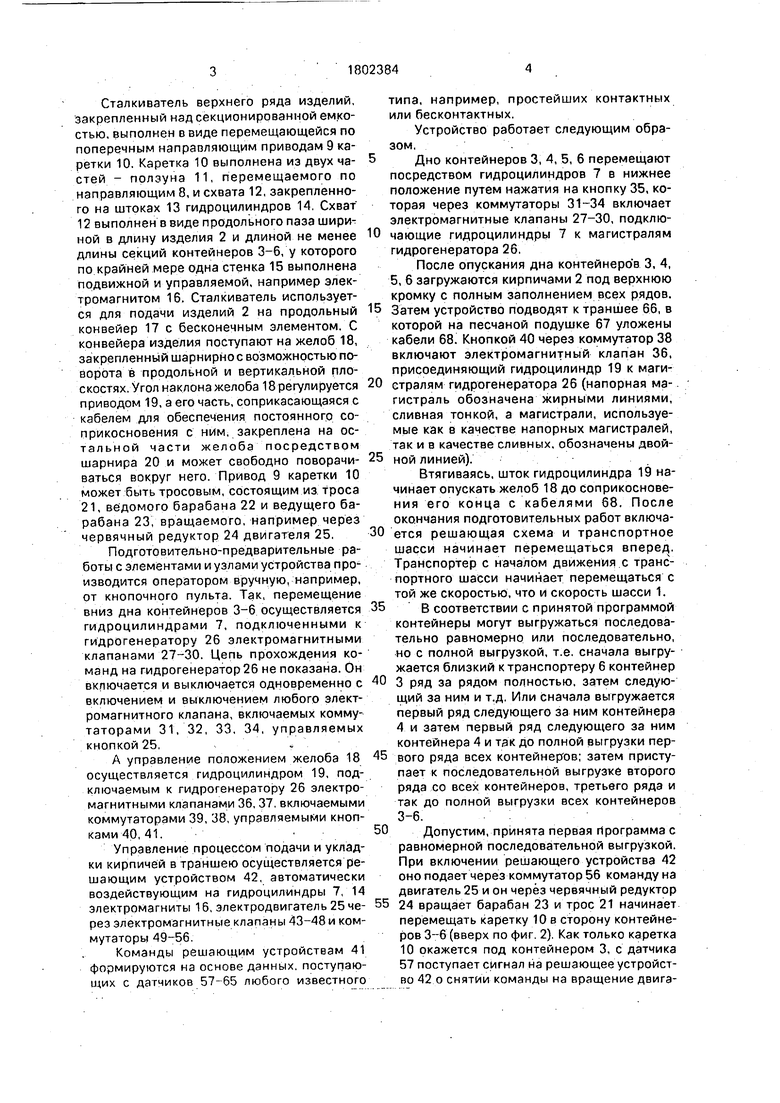
Подготовительно-предварительные работы с элементами и узлами устройства производится оператором вручную, например, от кнопочного пульта. Так, перемещение вниз дна контейнеров 3-6 осуществляется гидроцилиндрами 7, подключенными к гидрогенератору 26 электромагнитными клапанами 27-30. Цепь прохождения команд на гидрогенератор 26 не показана. Он включается и выключается одновременно с включением и выключением любого электромагнитного клапана, включаемых коммутаторами 31, 32, 33, 34, управляемых кнопкой 25.« .
А управление положением желоба 18 осуществляется гидроцилиндром 19, подключаемым к гидрогенератору 26 электромагнитными клапанами 36, 37. включаемыми коммутаторами 39, 38, управляемыми кнопками 40, 41.
Управление процессом подачи и укладки кирпичей в траншею осуществляется решающим устройством 42, автоматически воздействующим на гидроцилиндры 7, 14 электромагниты 16, электродвигатель 25 через электромагнитные клапаны 43-48 и коммутаторы 49-56.
Команды решающим устройствам 41 формируются на основе данных, поступающих с датчиков 57-65 любого известного
типа, например, простейших контактных или бесконтактных.
Устройство работает следующим образом,.
Дно контейнеров 3, 4, 5, 6 перемещают посредством гидроцилиндров 7 в нижнее положение путем нажатия на кнопку 35, которая через коммутаторы 31-34 включает электромагнитные клапаны 27-30, подключающие гидроцилиндры 7 к магистралям гидрогенератора 26.
После опускания дна контейнеров 3, 4, 5, 6 загружаются кирпичами 2 под верхнюю кромку с полным заполнением всех рядов.
5 Затем устройство подводят к траншее 66, в которой на песчаной подушке 67 уложены кабели 68. Кнопкой 40 через коммутатор 38 включают электромагнитный клапан 36, присоединяющий гидроцилиндр 19 к маги0 стралям гидрогенератора 26 (напорная ма- гистраль обозначена жирными линиями, сливная тонкой, а магистрали, используемые как в качестве напорных магистралей, так и в качестве сливных, обозначены двой5 ной линией).
Втягиваясь, шток гидроцилиндра 19 начинает опускать желоб 18 до соприкосновения его конца с кабелями 68. После окончания подготовительных работ включа0 ется решающая схема и транспортное шасси начинает перемещаться вперед. Транспортер с началом движения с транспортного шасси начинает перемещаться с той же скоростью, что и скорость шасси 1.
5 В соответствии с принятой программой контейнеры могут выгружаться последовательно равномерно или последовательно, но с полной выгрузкой, т.е. сначала выгружается близкий к транспортеру 6 контейнер
0 3 ряд за рядом полностью, затем следующий за ним и т.д. Или сначала выгружается первый ряд следующего за ним контейнера 4 и затем первый ряд следующего за ним контейнера 4 и так до полной выгрузки пер5 вого ряда всех контейнеров; затем приступает к последовательной выгрузке второго ряда со всех контейнеров, третьего ряда и так до полной выгрузки всех контейнеров
3-6.:
0 Допустим, принята первая Программа с равномерной последовательной выгрузкой. При включении решающего устройства 42 оно подает через коммутатор 56 команду на двигатель 25 и он через червячный редуктор
5 24 вращает барабан 23 и трос 21 начинает перемещать каретку 10 в сторону контейнеров 3-6 (вверх по фиг. 2). Как только каретка 10 окажется под контейнером 3, с датчика 57 поступает сигнал на решающее устройство 42 о снятии команды на вращение двигателя 19 и формировании команд на опускание захвата 12 и подъема дна контейнера 3. Ч ;рез коммутатор 54 включается электро- мзгнитный клапан 48 и гидроцилиндр 14 начинает выдвигать шток 13 до поступления о гнала с датчика 64 о снятии команды и шгок 13 останавливается. Через коммута- тс р 49 включается электромагнитный кла- rii -н 43 и гидроцилиндр 7 контейнера 3 нг чинает перемещать дно вверх. Когда кир- m чи 2 верхнего ряда контейнера 3 окажутся м(:жду боковыми стенками захвата 12 и верхняя кромка кирпичного ряда коснется дат- чи|ка 65, поступает сигнал на решающее устройство 42 о снятии команды на подъем дйа контейнера 3 и электромагнитный кла- 43 отключается.
После отключения электромагнитного клЬпана 43 формируется команда, которая через коммутатор 55 включает электромаг- 16, осуществляющий захват всего ве эхнего ряда кирпичей 2 контейнера 3. Поел захвата верхнего ряда кирпичей 2 через коммутатор 53 на электромагнитный клапан 47:поступает команда на включение гидро- ци)шндра 14 и шток 13 начинает втягиваться до срабатывания датчика 53, подающего сигнал о снятии команды на втягивание шт|эка 13.
Затем с решающего устройства 42 поступает через коммутатор 56 команда на двигатель 35, перемещающий каретку 10 в сторону транспортера 17. В момент нахождения каретки 10 над транспортером срабатывает датчик 61, подающий сигнал о прекращении команды на двигатель 25. Если три этом на транспортере 17 под захватов 12 нет кирпичей 2 и с датчика 61 поступает сигнал, что транспортер свободен, при поступлении такого сигнала прекращается действие команды на схват, электромагниты 16 обесточиваются и весь ряд кирпичей с высоты чуть большей (на 10-15 см) толщины кирпича падает на движущийся транспортер 6. Поскольку высота пздэния ряда кирпичей небольшая, то она не может нанести каждому кирпичу из ряда механических повреждений и дезориенти- ров ть кирпичи 2 в ряду. Кирпичи перемещаются транспортером 17 к желоб.у далее по нему скатываются, не терял ориентации, в траншею 60 на кабели 68.
Одновременно с решающего устройства 52 через коммутатор 56 на двигатель 25 поступает команда на перемещение каретки 1 ) в сторону контейнеров 3, 4, 5, 6 (вверх по с| иг. 2). При достижении кареткой положения, когда захват 12 находится над кон- тейкером 4 на решающее устройство 42 с датчика 58 поступает сигнал о снятии команды на вращение двигателя 25 и формирования команд на опускание захвата 12 и подъема дна контейнера 4.
Первая команда через коммутатор 54 5 включает электромагнитный клапан 48 и гидроцилиндр 14 начинает выдвигать шток 13 до тех пор, пока с датчика 64 не поступит сигнал о снятии команды и шток останавливается.
10 Вторая команда через коммутатор 50 включает электромагнитный клапан 44 и гидроцилиндр 7 контейнера 4 начинает перемещать дно вверх. Когда кирпичи 2 верхнего ряда контейнера 4 окажутся между 15 стенками захвата 12 и верхняя кромка кирпичного ряда соприкоснется с датчиком 65 на решающее устройство 42 поступает сигнал о снятии команды на подъем дна контей- .нера 4 и электромагнитный клапан 44 0 отключается.
После отключения электромагнитного клапана 44 формируется команда, которая через коммутатор 55 включает электромагниты 16, осуществляющие захват всего вер- 5 хнего ряда кирпичей 2 контейнера 4.
После захвата верхнего ряда кирпичей 2, через коммутатор 53 на электромагнитный клапан 47 поступает команда на включение гидроцилиндра 14 и шток 13 начинает 0. втягиваться до срабатывания датчика 63, подающего сигнал о снятии команды на втягивание штока 13.
Затем с решающего устройства 42 через коммутатор 56 поступает команда на двига- 5 тель 25, перемещающий каретку 10 в сторону транспортера 17. В момент нахождения каретки над транспортером 17 срабатывает датчик 57, подающий на решающее устройство сигнал о снятии команды на двигатель 0 25, и каретка 10 неподвижно находится над транспортером 17 пока по нему перемешаются кирпичи 2 предыдущего ряда, взятого с контейнера 3.
Как только последний кирпич ряда ми- 5 нует датчик 62, поступает сигнал - транспортер свободен и снимается команда на схват злэктромагниты обесточиваются и весь ряд кирпичей ложится на транспортер, а каретка 10 отправляется за следующим 0 рядом кирпичей. Таким образом,.по транспортеру 17 движется непрерывный ряд кирпичей, который, перемещаясь по желобу 18, упорядочение укладывается в траншею 66 на кабель 68 и так до полной выгрузки 5 контейнеров 3, 4, 5, 6, после чего контейнеры необходимо загружать вновь и продолжать укладку.
Формула изобретения Машина для укладки изделий в траншею, содержащая самоходное шасси, на котором закреплены грузовая емкость с вертикальными стенками и подвижным в вертикальном направлении от привода дном, сталкиватель верхнего слоя изделий, закрепленный над емкостью для их подачи на конвейер, с бесконечным гибким элементом, перемещающий изделия на наклонный продольный желоб, о т л и ч а ю щ а я с я тем, что, с целью повышения качества укладки, ёмкость разделена вертикальными
продольными перегородками, отделяющими каждый ряд изделий, дно выполнено секционным с индивидуальным приводом подъема для каждого ряда изделий, сталкиватель расположен для поперечной подачи изделий, а конвейер - продольно перед желобом, который закреплен шарнирно с возможностью поворота в продольной вертикальной плоскости,

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для кладки кирпичных стен | 1988 |
|
SU1631151A1 |
| Устройство для укладки штучных изделий в тару | 1988 |
|
SU1599258A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ, ОБЖИГОВАЯ МНОГОЩЕЛЕВАЯ ШАХТНАЯ ПЕЧЬ ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И СУШИЛЬНАЯ КАМЕРА ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 1993 |
|
RU2046708C1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Устройство для укладки керамических изделий на сушильные вагонетки | 1982 |
|
SU1031733A1 |
| Установка для съема кирпича с по-лОчНОй ВАгОНЕТКи и уКлАдКи ЕгО НАпЕчНую ВАгОНЕТКу | 1978 |
|
SU837887A1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| УСТРОЙСТВО для РАЗДЕЛЕНИЯ ПОТОКА ШТУЧНЫХ iЛ'.>& НО ^ЛИЗДЕЛИЙ'^——" | 1972 |
|
SU343856A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ МОЙКИ ИЗДЕЛИЙ | 1992 |
|
RU2008988C1 |
| УСТРОЙСТВО для УКЛАДКИ КИРПИЧА-СЫРЦА НА ВАГОНЕТКУ | 1973 |
|
SU368043A1 |


4&&ЗЩ -
Фае. .
НШ;- ///////У
tn
11 фиг. 4
15
-г
ШШ
/77, т/Л
12
t 65 Фи г. 5
(риг.З
Ю
7
Г
16
21
