Изобретение относится к области электрогидравлических рулевых приводов, предназначенных для применения в системах управления маневренными летательными аппаратами (ЛА).
Современные маневренные ЛА управляются с помощью систем дистанционного управления (СДУ), неотъемлемой частью которых являются электрогидравлические рулевые приводы (ЭГРП), с помощью которых перемещаются органы управления самолетом. Теоретические основы конструирования и особенности практического применения ЭГРП подробно изложены в ряде работ. Среди них:
- А.С. Алексеенко, С.А. Ермаков, С.В. Константинов, В.Е. Кузнецов, Ю.Г. Оболенский, П.Г. Редько. Системы электрогидравлических рулевых приводов комплексов управления полетом самолетов. СПб: Изд-во СПбГЭТУ «ЛЭТИ», 2019.-518 с. с ил.
- Оболенский Ю.Г., Ермаков С.А., Сухоруков Р.В. Введение в проектирование систем авиационных рулевых приводов: учебное пособие. М: издательство ГУП г. Москвы «Окружная газета ЮЗАО». 2011. - 344 с. с ил.
- Ю.Г. Оболенский. Управление полетом маневренных самолетов. М.: филиал Воениздат.2007. - 480 с.
- С.В. Константинов, П.Г. Редько, С.А. Ермаков. Электрогидравлические рулевые приводы систем управления полетом маневренных самолетов. М.: Янус-К. 2006. 316 с. с ил.
- С.В.Костин, Б.И. Петров, Н.С. Гамынин. Рулевые приводы. М.: «Машиностроение». 1973. 205 с. с ил.
Типовые как одноканальные, так и двухканальные ЭГРП включают в свой состав силовой гидроцилиндр с выходным штоком, электрогидравлический усилитель мощности (ЭГУ) типа «сопло-заслонка» или «струйная трубка» с золотником, снабженным датчиком его положения (Оболенский Ю.Г., Ермаков С.А., Сухоруков Р.В. Введение в проектирование систем авиационных рулевых приводов: учебное пособие. М: издательство ГУП г. Москвы «Окружная газета ЮЗАО». 2011. - 344 с. с ил., рис. 2.3.12, с. 65, рис. 2.3.16). ЭГРП управляются с помощью электронного блока управления (БУ), выходной сигнал которого в виде тока поступает на входные обмотки ЭГУ (Оболенский Ю.Г., Ермаков С.А., Сухоруков Р.В. Введение в проектирование систем авиационных рулевых приводов: учебное пособие. М: издательство ГУП г. Москвы «Окружная газета ЮЗАО». 2011. - 344 с. с.88, рис. 3.6.2)
Наиболее близким по отношению к заявляемому техническому решению является ЭГРП, содержащий силовой гидроцилиндр, шток которого соединен с рулевой поверхностью ЛА, ЭГУ, включающий в себя последовательно соединенные электромеханический преобразователь сигналов типа «сопло-заслонка» или «струйная трубка» и гидрораспределитель (золотник), управляющий работой силового гидроцилиндра, датчик перемещения штока силового гидроцилиндра, датчик перемещения золотника и блок управления, содержащий первый сумматор, входы которого соединены с выходом датчика перемещения штока силового гидроцилиндра и с управляющим входом ЭГРП, усилитель, вход которого подключен к выходу первого сумматора, а выход соединен с входом электромеханического преобразователя сигналов (С.В. Константинов, П.Г. Редько, С.А. Ермаков. Электрогидравлические рулевые приводы систем управления полетом маневренных самолетов. М.: Янус-К. 2006. 316 с. с 88 рис. 3.6.2).
Недостатками прототипа и отмеченных аналогов с подобной структурой являются:
1) нелинейная скоростная характеристика ЭГРП, определяемая как отношение скорости перемещения силового штока  к перемещению золотника Хзол;
к перемещению золотника Хзол;
2) температурный дрейф нулевого положения золотника Хзол(0);
3) значительное снижение скорости перемещения золотника в области малых значений управляющего сигнала;
4) невысокие динамические характеристики контура управления золотником ЭГУ;
5) недостаточные характеристики аэроупругости комплекса «привод → СДУ → самолет» в продольном канале управления.
Техническим результатом, достигаемым в заявляемом электрогидравлическом рулевом приводе систем управления полетом ЛА, является возможность его использования во время практической эксплуатации ЛА в условиях широкого изменения температур, а также возможность эксплуатации самолета с недостаточными исходными характеристиками аэроупругости за счет устранения возникновения флаттера и повышение статических и динамических характеристики ЭГРП в целом.
Заявленный результат достигается тем, что ЭГРП, в состав которого входят электрогидравлический усилитель (ЭГУ), содержащий последовательно соединенные электромеханический преобразователь сигналов, золотниковый гидрораспределитель, датчик перемещения золотника, вход которого соединен с выходом золотникового гидрораспределителя, силовой гидроцилиндр, выход которого является выходом ЭГРП, а вход которого соединен с выходом золотникового гидрораспределителя, датчик перемещения штока силового гидроцилиндра и электронный блок управления ЭГРП, к первому входу которого подключен входной сигнал ЭГРП, второй и третий входы блока управления соединены соответственно с выходами датчика перемещения силового штока и датчика перемещения золотника, а электронный блок управления ЭГРП, содержащий первый сумматор, первый усилитель сигналов, вход которого подключен к выходу первого сумматора, первый инвертирующий вход сумматора соединен с выходом датчика перемещения штока силового гидроцилиндра, дополнительно содержит последовательно соединенные второй усилитель сигналов, первый нелинейный блок, второй сумматор, третий усилитель сигналов, второй нелинейный блок, четвертый корректирующий усилитель сигналов, пятый усилитель сигналов, первый интегратор, третий сумматор и третий нелинейный блок, выход которого является выходом электронного блока управления ЭГРП, первый фильтр и второй фильтр, выход которого подключен к второму входу первого сумматора, вход второго фильтра является входом электронного блока управления ЭГРП, последовательно соединенные шестой, седьмой и восьмой усилители сигналов, вход первого фильтра соединен с выходом датчика перемещения золотника, выход первого фильтра подключен к второму инвертирующему входу второго сумматора и к входу шестого усилителя сигналов, второй и третий (инвертирующий) входы третьего сумматора подключены соответственно к выходу четвертого корректирующего усилителя сигналов и к выходу восьмого усилителя сигналов.
Дополнительно первый фильтр содержит четвертый сумматор, вход которого соединен с выходом датчика перемещения золотника и является входом первого фильтра, последовательно соединенные ключ, нелинейный блок и второй интегратор, выход которого подключен к второму инвертирующему входу четвертого сумматора, реле, вход которого соединен с выходом датчика перемещения золотника, выход четвертого сумматора, являющийся выходом первого фильтра, подключен к коммутирующему входу ключа, управляющий вход которого соединен с выходом реле, а второй нелинейный блок представляет собой переменный коэффициент усиления сигналов в области малых значений заданной скорости перемещения золотника.
Сущность изобретения поясняется фигурами фиг. 1-4:
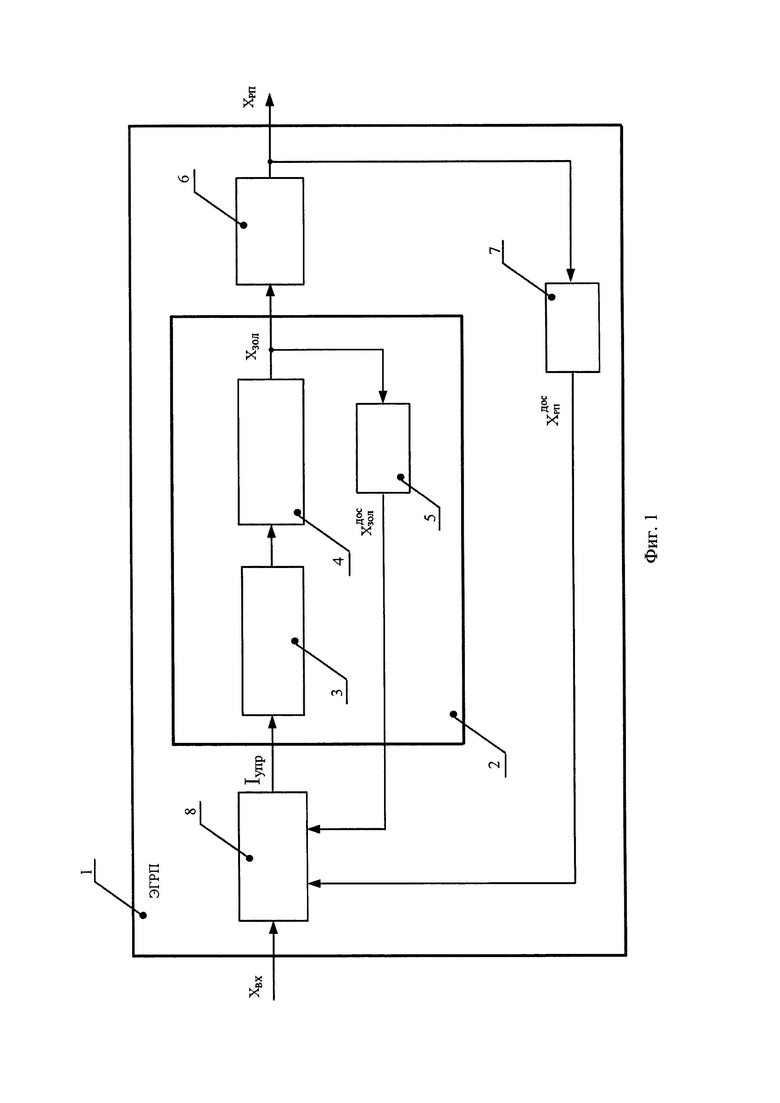
на фиг. 1 изображена блок-схема ЭГРП;
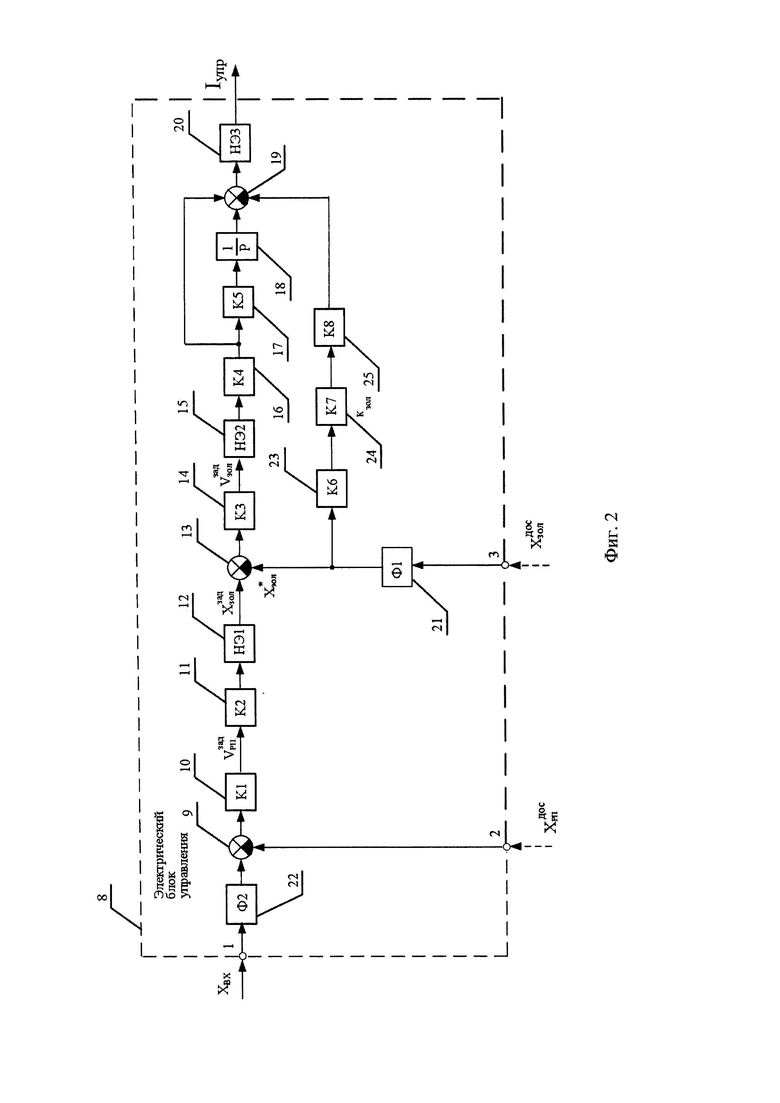
на фиг. 2 приведена структура электрического блока управления;
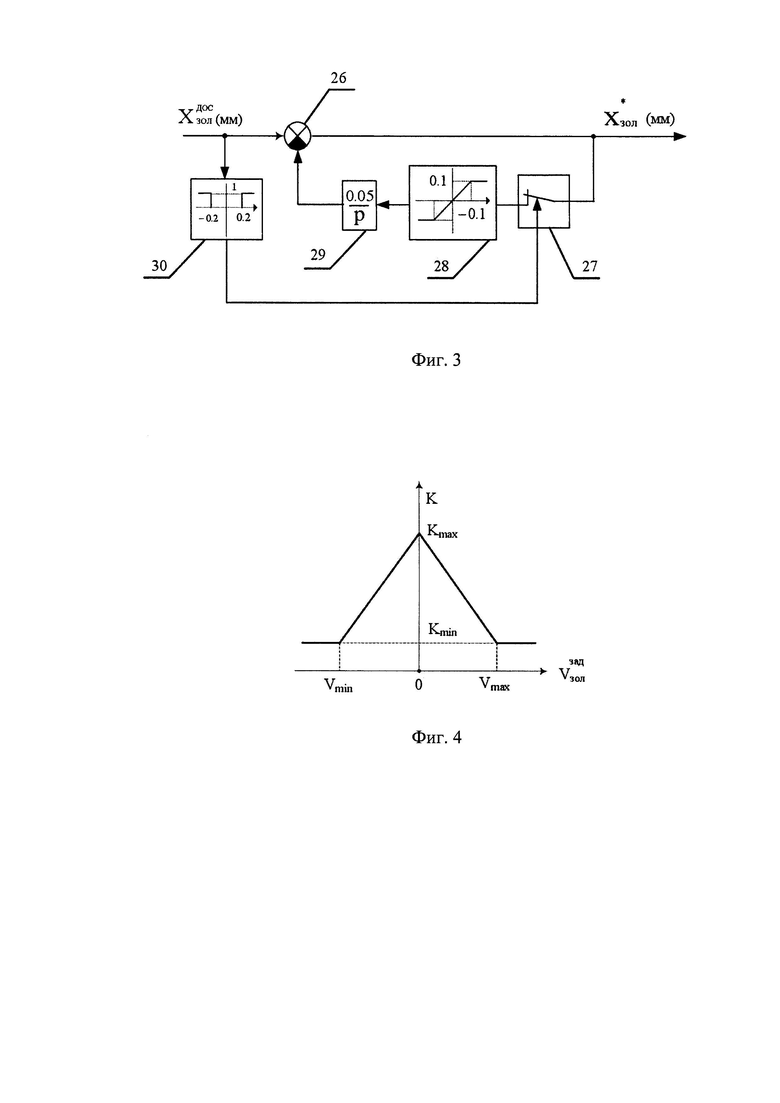
на фиг. 3 показана структура первого фильтра;
на фиг. 4 представлен график изменения коэффициента усиления второго нелинейного блока.
На фиг. 1-4 использованы следующие обозначения:
Хвх - входной сигнал на воде в ЭГРП;
Iупр - управляющий сигнал на входе ЭГУ;
Хзол - перемещение золотника ЭГУ;
ХРП - перемещение штока силового гидроцилиндра;
 - сигнал с датчика перемещения штока силового гидроцилиндра;
- сигнал с датчика перемещения штока силового гидроцилиндра;
 - сигнал с датчика положения золотника;
- сигнал с датчика положения золотника;
 - заданная скорость перемещения золотника;
- заданная скорость перемещения золотника;
 - заданное перемещение золотника;
- заданное перемещение золотника;
 - заданная скорость перемещения золотника;
- заданная скорость перемещения золотника;
 - оценка перемещения золотника;
- оценка перемещения золотника;
1 - ЭГРП;
2 - ЭГУ;
3 - электромеханический преобразователь сигналов;
4 - гидрораспределитель ЭГУ;
5 - датчик перемещения золотника;
6 - силовой гидроцилиндр;
7 - датчик перемещения штока силового гидроцилиндра;
8 - электрический блок управления;
9 - первый сумматор;
10, 11 - соответственно первый и второй усилители сигналов;
12 - первый нелинейный блок;
13 - второй сумматор;
14 - третий усилитель сигналов;
15 - второй нелинейный блок;
16 - четвертый корректирующий усилитель сигналов;
17 - пятый усилитель сигналов;
18 - первый интегратор;
19 - третий сумматор;
20 - третий нелинейный блок;
21, 22 - соответственно первый и второй фильтры;
23, 24, 25 - соответственно шестой, седьмой и восьмой усилители сигналов;
26 - четвертый сумматор;
27 - ключ;
28 - четвертый нелинейный блок;
29 - второй интегратор;
30 - реле.
Электрогидравлический рулевой привод систем управления полетом летательных аппаратов (1) включает в себя электрогидравлический усилитель сигналов (ЭГУ) (2), содержащий последовательно соединенные электромеханический преобразователь сигналов (3), золотниковый гидрораспределитель (4), датчик перемещения золотника (5), вход которого соединен с выходом золотникового гидрораспределителя (4), силовой гидроцилиндр (6), выход которого является выходом ЭГРП (1), а вход которого соединен с выходом золотникового гидрораспределителя (4), датчик (7) перемещения штока силового гидроцилиндра и электрический блок управления (8) ЭГРП, к первому входу которого подключен входной сигнал ЭГРП, второй и третий входы блока управления (8) соединены соответственно с выходами датчика (7) перемещения силового штока и датчика перемещения золотника (5).
В состав электрического блока управления ЭГРП (8) входят первый сумматор (9), первый усилитель сигналов (10), вход которого подключен к выходу первого сумматора (9), первый инвертирующий вход сумматора (9) соединен с выходом датчика (7) перемещения штока силового гидроцилиндра, дополнительно содержит последовательно соединенные второй усилитель сигналов (11), первый нелинейный блок (12), второй сумматор (13), третий усилитель сигналов (14), второй нелинейный блок (15), четвертый корректирующий усилитель сигналов (16), пятый усилитель сигналов (17), первый интегратор (18), третий сумматор (19) и третий нелинейный блок (20), выход которого является выходом электрического блока управления ЭГРП (8), первый фильтр (21) и второй фильтр (22), выход которого подключен к второму входу первого сумматора (9), вход второго фильтра (22) является входом электрического блока управления ЭГРП (8), последовательно соединенные шестой (23), седьмой (24) и восьмой (25) усилители сигналов, вход первого фильтра (21) соединен с выходом датчика (5) перемещения золотника, выход первого фильтра (21) подключен к второму инвертирующему входу второго сумматора (13) и к входу шестого усилителя сигналов (23), второй и третий (инвертирующий) входы третьего сумматора (19) подключены соответственно к выходу четвертого корректирующего усилителя сигналов (16) и к выходу восьмого усилителя сигналов (25).
Первый фильтр (21) содержит четвертый сумматор (26), вход которого соединен с выходом датчика (5) перемещения золотника и является входом первого фильтра (21), последовательно соединенные ключ (27), четвертый нелинейный блок (28) и второй интегратор (29), выход которого подключен к второму инвертирующему входу четвертого сумматора (26), реле (30), вход которого соединен с выходом датчика (5) перемещения золотника, выход четвертого сумматора (26), являющийся выходом первого фильтра (21), подключен к коммутирующему входу ключа (27), управляющий вход которого соединен с выходом реле (30). Структура первого фильтра (21) такова, что при больших сигналах с выхода датчика (5) перемещения золотника, находящихся вне зоны нечувствительности реле (3), выходной сигнал первого фильтра повторяет сигнал на его входе. В противном случае, при малых сигналах с выхода датчика (5) перемещения золотника, находящихся внутри зоны нечувствительности реле (3), выходной и входной сигналы первого фильтра (21) связаны между собой в соответствии с передаточной функцией изодромного звена 20Р/(20Р+1) с большой постоянной времени. Это позволяет исключить дрейф нулевого смещения положения золотника от температуры, имеющего место при практической эксплуатации ЭГРП.
Коэффициент усиления K1 первого усилителя сигналов (10) определяется из условия обеспечения надлежащей добротности рулевого привода. В частности, K1=DРП=30.
Коэффициент усиления K2 второго усилителя сигналов (11) выбирается из условия обеспечения максимальной скорости перемещения штока рулевого привода при максимальном отклонении золотника. Для этого случая
 ,
,
где  - максимальная скорость перемещения штока рулевого привода.
- максимальная скорость перемещения штока рулевого привода.
С помощью первого нелинейного блока осуществляется ограничение заданного значения перемещения золотника на предельном уровне  , равном, например ±1,8 мм.
, равном, например ±1,8 мм.
Коэффициент усиления K3 третьего усилителя сигналов (14) определяется из условия обеспечения надлежащей добротности контура управления золотником. В частности, K3=DСП=30.
Второй нелинейный блок (15) представляет собой переменный коэффициент усиления сигналов, определяемый в соответствии с фиг. 4. Параметры Kmin, Kmax, Vmax, Vmin формируются индивидуально для конкретного ЭГРП, используемого на конкретном ЛА.
Четвертый корректирующий усилитель сигналов (16) предназначен для корректировки скоростной характеристик ЭГРП до нужных значений. На первом включении ЭГРП на борту ЛА производится тестирование реальной фактической скоростной характеристики  (Хзол). После этого сигнал скорости изменения золотника с выхода третьего усилителя сигналов корректируется в усилителе сигналов (16) с использованием результатов предварительного тестирования таким образом, чтобы реальная скоростная характеристика совпадала далее с расчетной (требуемой). Полученное таким образом переменное значение коэффициента усиления K4 в четвертом корректирующем усилителе сигналов (16) сохраняется далее для всех последующих полетов ЛА.
(Хзол). После этого сигнал скорости изменения золотника с выхода третьего усилителя сигналов корректируется в усилителе сигналов (16) с использованием результатов предварительного тестирования таким образом, чтобы реальная скоростная характеристика совпадала далее с расчетной (требуемой). Полученное таким образом переменное значение коэффициента усиления K4 в четвертом корректирующем усилителе сигналов (16) сохраняется далее для всех последующих полетов ЛА.
Шестой (23) седьмой (24) и восьмой (25) усилители сигналов служат для коррекции динамических характеристик контура управления золотником ЭГУ и всего ЭГРП в целом. Коэффициенты усиления K6, K7 и K8 в этих усилителях выбираются экспериментально. В частности, K6=K3, K7=K4, K8=0,4÷0,7.
В пятом усилителе сигналов (17) задается нужное значение скоростной характеристики первого интегратора (18), обеспечивающее желаемые динамические характеристики ЭГРП. Интегратор (18), кроме того, совместно с вторым нелинейным блоком (15) повышает устойчивость работы ЭГРП в области малых ходов золотника.
Третий нелинейный блок (20) обеспечивает ограничение управляющего тока Iупр в ЭГУ на максимальном уровне, в частности на уровне ±15 мА.
Второй фильтр (22) представляет собой фильтр-пробку с передаточной функцией
 ,
,
где Р - оператор Лапласа, Т1, Т2, ξ1 и ξ2 постоянные времени и декременты затухания второго фильтра. Параметры фильтра выбираются из условия обеспечения достаточных характеристик аэроупругости комплекса «привод → СДУ → конкретный самолет» в продольном канале управления, не допускающих возникновение флаттера. В частности, параметры второго фильтра (22) могут быть равными Т1=0,015; Т2=0,018; ξ1=0,2; ξ2=0,6.
Таким образом, по сравнению с аналогами, заявляемый для патентования ЭГРП обеспечивает:
1) близкую к линейной скоростную характеристику ЭГРП, определяемую как отношение скорости перемещения силового штока  к перемещению золотника Хзол за счет применения четвертого корректирующего усилителя сигналов (16);
к перемещению золотника Хзол за счет применения четвертого корректирующего усилителя сигналов (16);
2) стабилизацию статических и динамических характеристик ЭГРП в условиях температурного дрейфа нулевого положения золотника Хзол(0),
возникающего на практике при эксплуатации ЛА в различных климатических условиях за счет применения первого изодромного фильтра (21).
3) приемлемую скорость перемещения золотника в области малых значений управляющего сигнала за счет применения второго нелинейного блока (15), представляющего собой переменный коэффициент усиления сигналов, определяемый в соответствии с фиг. 4 и за счет использования первого интегратора (18);
4) достаточные характеристики аэроупругости комплекса «привод → СДУ → конкретный самолет» в продольном канале управления, исключающие возникновение флаттера за счет применения второго фильтра (22);
5) приемлемые статические и динамические характеристики внутреннего контура управления золотником (ЭГУ) и внешнего контура управления штоком силового цилиндра в условиях действия указанных внешних возмущений за счет выбора структуры и параметров электрического блока управления (8).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1998 |
|
RU2132080C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2008 |
|
RU2374671C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2190129C2 |
| Гибридный электрогидравлический рулевой привод | 2016 |
|
RU2704931C2 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С ДОПОЛНИТЕЛЬНЫМИ РЕЖИМАМИ КОЛЬЦЕВАНИЯ И ДЕМПФИРОВАНИЯ ВЫХОДНОГО ЗВЕНА | 2011 |
|
RU2483977C2 |
Изобретение относится к области электрогидравлических рулевых приводов (ЭГРП), предназначенных для применения в системах управления маневренными летательными аппаратами. Устройство содержит электрогидравлический усилитель, состоящий из последовательно соединенных электромеханических преобразователей сигналов, золотниковый гидрораспределитель, датчик перемещения золотника, вход которого соединен с выходом золотникового гидрораспределителя, силовой гидроцилиндр, выход которого является выходом ЭГРП, а вход которого соединен с выходом золотникового гидрораспределителя, датчик перемещения штока силового гидроцилиндра, электронный блок управления ЭГРП, к первому входу которого подключен входной сигнал ЭГРП. Второй и третий входы электронного блока управления ЭГРП соединены соответственно с выходами датчика перемещения силового штока и датчика перемещения золотника. Технический результат заключается в возможности использования ЭГРП во время практической эксплуатации ЛА в условиях широкого изменения температур, а также возможность эксплуатации самолета с недостаточными исходными характеристиками аэроупругости. 3 з.п. ф-лы, 4 ил.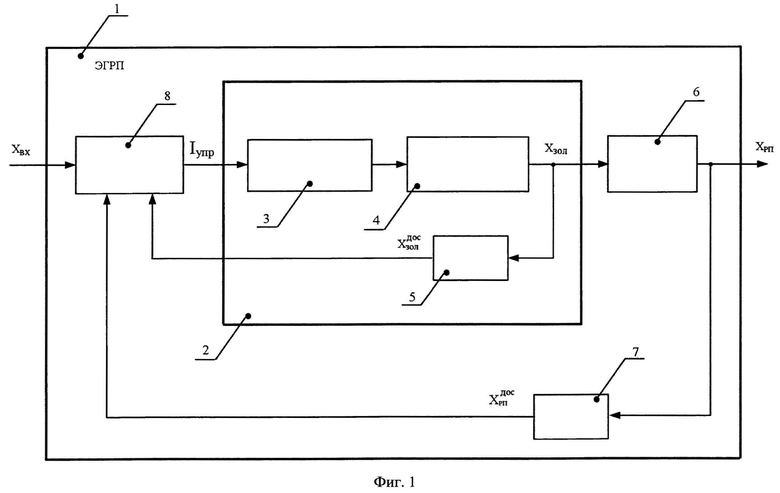
1. Электрогидравлический рулевой привод (ЭГРП) систем управления полетом летательных аппаратов, содержащий электрогидравлический усилитель, состоящий из последовательно соединенных электромеханических преобразователей сигналов, золотниковый гидрораспределитель, датчик перемещения золотника, вход которого соединен с выходом золотникового гидрораспределителя, силовой гидроцилиндр, выход которого является выходом ЭГРП, а вход которого соединен с выходом золотникового гидрораспределителя, датчик перемещения штока силового гидроцилиндра, электронный блок управления ЭГРП, к первому входу которого подключен входной сигнал ЭГРП, при этом второй и третий входы электронного блока управления ЭГРП соединены соответственно с выходами датчика перемещения силового штока и датчика перемещения золотника.
2. Электрогидравлический рулевой привод систем управления полетом летательных аппаратов по п. 1, отличающийся тем, что электронный блок управления содержит первый сумматор, первый усилитель сигналов, вход которого подключен к выходу первого сумматора, первый инвертирующий вход сумматора соединен с выходом датчика перемещения штока силового гидроцилиндра, при этом электронный блок управления ЭГРП дополнительно содержит последовательно соединенные второй усилитель, первый нелинейный блок, второй сумматор, третий усилитель, второй нелинейный блок, четвертый корректирующий усилитель, пятый усилитель, первый интегратор, третий сумматор и третий нелинейный блок, выход которого является выходом электронного блока управления ЭГРП, первый фильтр и второй фильтр, выход которого подключен ко второму входу первого сумматора, вход второго фильтра является входом электронного блока управления ЭГРП, последовательно соединенные шестой, седьмой и восьмой усилители, вход первого фильтра соединен с выходом датчика перемещения золотника, выход первого фильтра подключен ко второму инвертирующему входу второго сумматора и к входу шестого усилителя, второй и третий инвертирующий входы третьего сумматора подключены соответственно к выходу четвертого корректирующего усилителя и к выходу восьмого усилителя.
3. Электрогидравлический рулевой привод систем управления полетом летательных аппаратов по п. 2, отличающийся тем, что первый фильтр электронного блока управления ЭГРП содержит четвертый сумматор, вход которого соединен с выходом датчика перемещения золотника и является входом первого фильтра, последовательно соединенные ключ, нелинейный блок и второй интегратор, выход которого подключен ко второму инвертирующему входу четвертого сумматора, реле, вход которого соединен с выходом датчика перемещения золотника, выход четвертого сумматора, являющийся выходом первого фильтра, подключен к коммутирующему входу ключа, управляющий вход которого соединен с выходом реле.
4. Электрогидравлический рулевой привод систем управления полетом летательных аппаратов по пп. 1-3, отличающийся тем, что второй нелинейный блок электронного блока управления ЭГРП представляет собой переменный коэффициент усиления, при этом величины Kmin, Kmax, Vmax, Vmin определяются индивидуально для конкретного ЭГРП.
| С.В | |||
| Константинов, П.Г | |||
| Редько, С.А | |||
| Ермаков | |||
| Электрогидравлические рулевые приводы систем управления полетом маневренных самолетов | |||
| М.: Янус-К | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Оболенский Ю.Г., Ермаков С.А., Сухоруков Р.В | |||
| Введение в проектирование систем авиационных рулевых приводов: учебное пособие | |||
| М.: Издательство ГУП г | |||
| Москвы "Окружная | |||

