Изобретение относится к технике автоматического управления полетом летательных аппаратов и может использоваться для улучшения функциональных характеристик привода и для быстрой адаптации систем управления при изменении свойств объектов управления.
Известен электрогидравлический следящий привод (ЭГСП) с непосредственным управлением [1], содержащий последовательно соединенные задатчик, первый и второй предварительные усилители-сумматоры, усилитель мощности (УМ), включенный на обмотку управления линейным электродвигателем (ЛЭД) непосредственно перемещающего посредством якоря шток золотника гидрораспределителя, соединенного с гидроцилиндром, на штоке которого установлен датчик обратной связи (ДОС), выход которого соединен с вторым входом первого предварительного усилителя-сумматора, а также ДОС положения золотника гидродвигателя, механически сцепленного с штоком золотника, выходной сигнал с которого подается на второй вход второго предварительного усилителя-сумматора, образуя замкнутый контур следящего привода рулевой машинки (РМ).
Статические характеристики ЛЭД непосредственного управления силовым гидрораспределителем (золотником гидродвигателя) имеют отклонения от линейной зависимости за счет действия внешних сил на золотник гидродвигателя, таких как трение, сопротивление, гидродинамические силы и т.д.
С увеличением мощности гидродвигателя растет и мощность ЛЭД, а следовательно, возрастают внешние силы сопротивления.
Недостатком известного привода является большая электрическая мощность управления золотником гидродвигателя, которая подводится к ЛЭД и расходуется на непосредственное перемещение силового золотникового гидрораспределителя, то есть золотника гидродвигателя, и должна включать в себя дополнительную мощность, которая расходуется на срезание посторонних частиц в гильзе золотника, например стружки или продуктов загрязнения рабочей жидкости.
В однокаскадном гидроусилителе при перемещении золотника гидродвигателя «сухое трение» значительно. Это обстоятельство приводит к возникновению «зоны нечувствительности» в электрическом канале управления, что снижает статическую и динамическую точность следящего привода.
Известен ЭГСП с непосредственным управлением [2], содержащий исполнительный гидродвигатель, на штоке которого установлен ДОС, и последовательно соединенные задатчик положения гидродвигателя, первый предварительный усилитель-сумматор и следящий привод РМ, содержащий последовательно соединительные, второй предварительный усилитель-сумматор и УМ, подключенный к обмотке управления ЛЭД, якорь которого соединен с золотником непосредственного управления гидродвигателем, а также ДОС РМ, связанный со штоком золотника гидродвигателя, выход которого подключен ко второму входу второго предварительного усилителя-сумматора, выход ДОС гидродвигателя подключен ко второму входу первого предварительного усилителя-сумматора, обратная связь по току обмотки управления ЛЭД подключена ко второму входу УМ.
К недостаткам известного привода следует отнести наличие нелинейных статических характеристик его отдельных узлов. Гидродинамические силы и силы трения, действующие на золотник гидродвигателя, вносят нелинейный характер изменений в статические характеристики привода. «Сухое трение» вносит «зону нечувствительности» в нелинейную статическую характеристику ЛЭД, а действие гидродинамических сил искажает линейный характер этой характеристики. С увеличением расхода жидкости через золотник гидродвигателя величина этих сил возрастает, а потому возрастает и нелинейный негативный эффект от их влияния.
К другим недостаткам известного привода следует отнести отсутствие астатизма в следящем приводе РМ. Последнее обстоятельство при наличии существенно нелинейной статической характеристики ЛЭД с зоной нечувствительности делает невозможным получение стабильных динамических и статистических характеристик привода в области малых входных управляющих сигналов.
Наиболее близким техническим решением является ЭГСП с непосредственным управлением [3] (прототип), содержащий сдвоенный золотник гидродвигателя, непосредственно управляющий сдвоенным исполнительным гидродвигателем, на штоке которого установлен ДОС (привод многоканальный и содержит две гидросистемы, но раскрыт только один из каналов управления) и последовательно соединенные задатчик положения гидродвигателя, первый предварительный усилитель-сумматор и следящий привод РМ, содержащий последовательно соединенные второй предварительный усилитель-сумматор и УМ, подключенный к обмотке управления ЛЭД непосредственного управления золотником, выход первого предварительного усилителя-сумматора соединен с входом второго предварительного усилителя-сумматора, ДОС гидродвигателя подключен ко второму входу первого предварительного усилителя, обратная связь по положению РМ подключена ко второму входу второго предварительного усилителя, обратная связь по току обмотки управления ЛЭД непосредственного управления золотником подключена ко второму входу УМ, модуль электрогидравлического усилителя, включающий в себя двухсистемную РМ со сдвоенным золотником РМ и датчиком постоянного тока (ДПТ) положения штока РМ, а также корректирующие устройство с моделью, включающее в себя последовательно соединенные первый усилитель с регулируемым ограничением, интегратор, блок сравнения, второй усилитель с регулируемым ограничением, дифференцирующее звено в ограниченной полосе частот, третий усилитель с регулируемым ограничением, выход которого включен на третий вход второго предварительного усилителя-сумматора, входы первого усилителя с регулируемым ограничением соединены с выходами первого предварительного усилителя-сумматора, интегратора и второго усилителя с регулируемым ограничением, второй вход блока сравнения соединен с ДПТ положения РМ, шток сдвоенного золотника РМ соединен с якорем ЛЭД непосредственного управления золотником, а шток двухсистемной РМ соединен со штоком сдвоенного золотника гидродвигателя.
К недостаткам известного привода следует отнести чувствительность к действию нелинейных и параметрических возмущающих факторов.
Значительные статистические ошибки, вызванные наличием зоны нечувствительности в контуре управления, уменьшая тем самым чувствительность привода в области малых сигналов задания.
К другим недостаткам известного привода следует отнести невозможность быстрой адаптации систем управления при изменении свойств объектов управления.
К другим недостаткам известного привода следует отнести невысокую надежность.
Задачей изобретения является высокая эффективность применения адаптивных средств коррекции для придания системе управления определенных свойств нечувствительности к действию нелинейных и параметрических возмущающих факторов и возможность быстрой адаптации систем управления при изменении свойств объектов управления.
Задачей изобретения также является повышение надежности привода и увеличение скорости перемещения штока гидродвигателя, что обеспечивает сверхманевренность самолету.
Адаптивная система не только дает возможность выдержать в заданных пределах динамические характеристики системы, но и позволяет в 2÷4 раза уменьшить статистические ошибки, вызванные наличием зоны нечувствительности в контуре управления, повышая тем самым чувствительность привода в области малых сигналов задания (фиг.14, фиг.15, фиг.16).
Сущность заявляемого изобретения, возможность его осуществления и промышленного использования поясняются чертежами, представленными на фигурах, где:
на фиг.1 представлена функциональная схема канала адаптивного управления ЭГСП;
на фиг.2 представлена функциональная схема системы адаптивного управления ЭГСП;
на фиг.3 представлена функциональная схема PID-контроллера;
на фиг.4 представлена схема электрическая контроллера холодильника;
на фиг.5 представлена функциональная схема контроллера межмашинного обмена;
на фиг.6 представлен функциональный узел управления передачей;
на фиг.7 представлен функциональный узел управления приемом;
на фиг.8 представлена структура области двухпортового ОЗУ PID-контроллера;
на фиг.9 представлено направление сигналов при взаимодействии микроконвертера и PID-контроллера;
на фиг.10 представлена диаграмма взаимодействия микроконвертера и PID-контроллера;
на фиг.11 представлена временная диаграмма приема/передачи данных между микроконвертером и PID-контроллером;
на фиг.12, фиг.12а, фиг.12б, фиг.12в, фиг.12г, фиг.12д, фиг.12е, фиг.12ж, фиг.12з представлен алгоритм работы машины состояний PID-контроллера;
на фиг.13 представлена структурная схема алгоритма адаптивного управления ЭГСП;
на фиг.14 представлена амплитудно-фазовая частотная характеристика РМ;
на фиг.15 представлена амплитудно-фазовая частотная характеристика РМ (Рн=200 атм);
на фиг.16 представлено сравнение амплитудно-фазовых частотных характеристик привода, снятых без нагрузки и с Pconst=10 тс;
на фиг.17 представлен алгоритм построения адаптивного регулятора по второму этапу;
на фиг.18 представлена модель контура сервопривода;
на фиг.19 представлена упрощенная модель адаптивного регулятора сервопривода;
на фиг.20 представлены переходные процессы нелинейной модели сервопривода;
на фиг.21 представлена структурная схема алгоритма адаптивного управления ЭГСП в корректирующем устройстве;
на фиг.22, фиг.22а, фиг.22б, фиг.22в, фиг.22г, фиг.22д, фиг.22е, фиг.22ж представлен алгоритм работы машины состояний КМО;
на фиг.23. представлено направление сигналов при взаимодействии передатчика и приемника;
на фиг.24. представлена временная диаграмма взаимодействия передатчика и приемника;
на фиг.25. представлена временная диаграмма передачи данных.
Указанные преимущества заявляемой системы адаптивного управления ЭГСП перед прототипом достигаются за счет того, что система адаптивного управления электрогидравлическим следящим приводом (ЭГСП), содержащая первый 1 канал адаптивного управления (КАУ), включающий в себя сдвоенный золотник 2, управляющий сдвоенным исполнительным гидродвигателем 3, на штоке которого установлен датчик обратной связи 4, задатчик положения гидродвигателя 5, усилитель мощности 6, выход 7 которого является первым выходом КАУ 1 и подключен к обмотке управления 8 линейного электродвигателя (ЛЭД) 9, соединенного с модулем электрогидравлического усилителя 10, включающим в себя сдвоенный золотник рулевой машинки 11, соединенный с якорем линейного электродвигателя 9, и двухсистемную рулевую машинку 12, соединенную со сдвоенным золотником 2, на штоке которой установлен датчик постоянного тока 13 положения рулевой машинки, а также корректирующее устройство с моделью 14, причем сдвоенный золотник 2 соединен двумя двунаправленными входами-выходами с двумя двунаправленными входами-выходами сдвоенного исполнительного гидродвигателя 3, сдвоенный золотник рулевой машинки 11 соединен двумя двунаправленными входами-выходами с двумя двунаправленными входами-выходами двухсистемной рулевой машинкой 12, в который дополнительно введены процессор 15 и PID-контроллер 16, представляющие собой корректирующее устройство с моделью 14, генератор 17, МКО-контроллер 18, микроконвертер 19, термохолодильник 20, контроллер холодильника 21, элемент ИЛИ 22, первый 23 усилитель, второй 24 усилитель, третий 25 усилитель, четвертый 26 усилитель, пятый 27 усилитель, выход 28 которого соединен в первым входом микроконвертера 19, первый 29 выход которого соединен с первым входом элемента ИЛИ 22, второй вход которого соединен с выходом 30 процессора 15, первый вход которого соединен с выходом 31 МКО-контроллера 18, первый 32 вход-выход которого соединен со входом-выходом задатчика 5, причем группа выходов 33 микроконвертера 19 соединена с первой группой входов PID-контроллера 16, группа выходов 34 которого соединена с первой группой входов микроконвертера 19, второй 35 выход которого соединен с первым входом контроллера холодильника 21, группа выходов 36 которого соединена со второй группой входов микроконвертера 19, второй вход которого соединен с выходом 37 второго 24 усилителя, вход которого соединен с выходом 38 датчика обратной связи 4 гидродвигателя и является первым входом КАУ1, причем группа входов-выходов 39 МКО-контроллера 18 является группой входов-выходов КАУ1 и соединена с группами входов-выходов PID-контроллера 16 и процессора 15, первая группа выходов 40 которого является первой группой выходов КАУ1 и соединена со второй группой входов PID-контроллера 16 и с первой группой входов МКО-контроллера 18, вторая 41 группа входов которого является второй группой выходов КАУ1 и соединена со второй группой выходов процессора 15 и с третьей группой входов PID-контроллера 16, выход 42 которого соединен со вторым входом процессора 15,третий вход которого является вторым 43 входом КАУ1, причем выход 44 линейного электродвигателя 9 является третьим входом КАУ1 и соединен со входом первого 23 усилителя, выход 45 которого соединен с третьим входом микроконвертера 19, четвертый 46 вход которого соединен с выходом третьего 25 усилителя, вход которого соединен с выходом 47 датчика постоянного тока 13 рулевой машинки и является четвертым входом КАУ1, выход 48 контроллера холодильника 21 соединен со входом термохолодильника 20, выход 49 которого соединен со вторым входом контроллера холодильника 21, выход 50 элемента ИЛИ 22 соединен со входом усилителя мощности 6, второй 51 и третий 52 выходы которого соединены соответственно со входами пятого 27 усилителя и четвертого 26 усилителя, выход 53 которого соединен с пятым входом микроконвертера 19, выход 54 генератора 17 соединен со входом PID-контроллера 16 и является вторым выходом КАУ1, и в нее дополнительно введены вторая 55, третья 56 и четвертая 57 обмотки ЛЭД, второй 58, третий 59, четвертый 60 датчики ДОС гидродвигателя, второй 61, третий 62, четвертый 63 датчики ДПТ РМ, второй 64, третий 65 и четвертый 66 каналы КАУ, первый 67, второй 68, третий 69, четвертый 70 контроллеры межмашинного обмена (КМО), первый 71, второй 72, третий 73, четвертый 74 передатчики, первый 75, второй 76, третий 77, четвертый 78, пятый 79, шестой 80, седьмой, 81 восьмой 82, девятый 83, десятый 84, одиннадцатый 85, двенадцатый 86 приемники, группы выходов которых соединены с первой 87, второй 88, третьей 89 группами входов первого 67, второго 68, третьего 69, четвертого 70 КМО соответственно, первые 90, вторые 91, третьи 92 выходы которых соединены с первыми входами приемников 75, 78, 81, 84, 76, 79, 82, 85, 77, 80, 83, 86 соответственно, причем второй вход первого 75 приемника соединен с выходом 93 второго передатчика, со вторыми входами восьмого 82 и одиннадцатого 85 приемников, выход 94 первого 71 передатчика соединен со вторыми входами четвертого 78, седьмого 81, десятого 84 приемников, выход 95 третьего 73 передатчика соединен со вторыми входами второго 76, пятого 79, двенадцатого 86 приемников, выход 96 четвертого 74 передатчика соединен со вторыми входами третьего 77, шестого 80, девятого 83 приемников, группы входов 97 первого 71, второго 72, третьего 73, четвертого 74 передатчиков соединены с группами выходов первого 67, второго 68, третьего 69, четвертого 70 КМО соответственно, четвертые 43 выходы которых соединены с первыми входами первого 1, второго 64, третьего 65, четвертого 66 КАУ соответственно, вторые 54 выходы которых соединены с первыми входами первого 67, второго 68, третьего 69, четвертого 70 КМО, адресные шины 40, шины данных 39 и управляющие шины 41 которых соединены с адресными шинами, шинами данных и управляющими шинами первого 1, второго 64, третьего 65, четвертого 66 КАУ, вторые входы второго 64, третьего 65 и четвертого 66 КАУ соединены с выходами второй 98, третьей 99 и четвертой 100 обмотками ЛЭД соответственно, входы 101, 102, 103 которых соединены с первыми выходами второго 64, третьего 65, четвертого 66 КАУ, третьи и четвертые входы которых соединены с выходами 104, 105, 106 вторых 58, третьих 59, четвертых 60 датчиков ДОС ГД и ДПТ РМ 107, 108, 109, 61, 62, 63 соответственно.
PID-контроллер 16 содержит первый 110 регистр, второй 111 регистр, третий 112 регистр, машину состояний 113, двухпортовое ОЗУ 114, первый 115 счетчик, второй 116 счетчик, первый 117 сдвиговый регистр, второй 118 сдвиговый регистр, первый 119 триггер, второй 120 триггер, третий 121 триггер, четвертый 122 триггер, пятый 123 триггер, преобразователь шины 124, первый 125 элемент ИЛИ, второй 126 элемент ИЛИ, третий 127 элемент ИЛИ, первый 128 элемент И, второй 129 элемент И, третий 130 элемент И, выход которого соединен с первым входом второго 126 элемента ИЛИ, выход которого соединен со сбросовым входом первого 115 счетчика, выход которого соединен с первым входом машины состояний 113, первая группа выходов которой соединена с группой входов первого 110 регистра, группа выходов которого соединена с первой группой входов машины состояний 113, вторая группа выходов которой соединена с группой входов второго 111 регистра, группа выходов которого соединена со второй группой входов машины состояний 113, а третий разряд группы соединен с первым входом первого 125 элемента ИЛИ, выход которого является первым сигналом группы выходов 34 PID-контроллера 16, второй сигнал которой соединен с выходом пятого триггера, информационный вход которого соединен с выходом второго 118 сдвигового регистра, информационный вход которого соединен с первым входом третьего 127 элемента ИЛИ и с выходом второго 129 элемента И, прямой вход которого соединен с выходом первого 119 триггера, информационным входом второго 120 триггера и инверсным входом первого 128 элемента И, выход которого соединен со вторым входом третьего 127 элемента ИЛИ, выход которого соединен с инверсным информационным входом и сбросовым входом второго 116 счетчика, группа выходов которого соединена с группой входов третьего 130 элемента И, причем вход 54 PID-контроллера 16 соединен с тактовыми входами первого 110, второго 111 и третьего 112 регистров, первого 119, второго 120, третьего 121, четвертого 122, пятого 123 триггеров, первого 115 и второго 116 счетчиков, первого 117 и второго 118 сдвиговых регистров и вторым входом машины состояний 113, третья группа выходов которой соединена с группой входов третьего 112 регистра, группа выходов которого соединена с группой установочных входов второго 118 сдвигового регистра и третьей группой входов машины состояний 113, четвертая группа выходов которой соединена с первой группой входов двухпортового ОЗУ 114, вторая группа входов которого соединена с пятой группой выходов машины состояний 113, шестая группа выходов которой соединена с третьей группой входов двухпортового ОЗУ 114, группа выходов которого соединена с группой входов преобразователя шины 124 и с четвертой группой входов машины состояний 113, седьмая группа выходов которой соединена с четвертой группой входов двухпортового ОЗУ 114, пятая группа входов которого соединена с восьмой группой выходов машины состояний 113, пятая группа входов которой соединена с группой выходов первого 117 сдвигового регистра, информационный вход которого соединен с выходом четвертого 122 триггера, информационный вход которого соединен с первым сигналом первой группы входов 33 PID-контроллера 16, второй сигнал которой соединен с информационным входом третьего 121 триггера, выход которого соединен с информационным входом первого 115 счетчика, третьим входом машины состояний 113 и вторым инверсным входом второго 126 элемента ИЛИ, второй вход которого соединен с третьим входом третьего 127 элемента ИЛИ, разрешающим входом второго 118 сдвигового регистра, со сбросовым входом пятого 123 триггера и выходом машины состояний 113, четвертый вход которой соединен со вторым входом первого 125 элемента ИЛИ, со сбросовыми входами первого 110 и второго 111 регистров и является первым сигналом третьей 41 группы входов, второй и третий сигналы которой соединены с преобразователем шины 124 и шестой группой входов двухпортового ОЗУ 114, седьмая группа входов которого является четвертым и пятым сигналами третьей 41 группы входов PID-контроллера 16, вход-выход 39 которого соединен со входом-выходом преобразователя шины 124, группа выходов которого соединена с восьмой группой входов двухпортового ОЗУ 114, девятая и десятая группы входов которого являются второй 40 группой входов PID-контроллера 16, третий сигнал первой 33 группы входов которого соединен с информационным входом первого 119 триггера, причем выход второго 120 триггера соединен с прямым входом первого 128 элемента И и инверсным входом второго 129 элемента И.
Контроллер холодильника 21 содержит ключевую схему 131, операционный усилитель 132, первый 133, второй 134, третий 135 транзисторы, первый 136, второй 137, третий 138, четвертый 139, пятый 140, шестой 141, седьмой 142, восьмой 143, девятый 144, десятый 145, одиннадцатый 146, двенадцатый 147, тринадцатый 148 резисторы, диод 149, первый 150, второй 151, третий 152, четвертый 153, пятый 154, шестой 155, седьмой 156 конденсаторы, первый контакт которого соединен со вторым контактом тринадцатого 148 резистора и является первым сигналом группы выходов 36, второй сигнал которой соединен со вторым контактом двенадцатого 147 резистора и с первым контактом шестого 155 конденсатора, второй контакт которого соединен со вторыми контактами первого 150, второго 151, третьего 152, четвертого 153, пятого 154, седьмого 156 конденсаторов, второго 137, шестого 141, седьмого 142, девятого 144, одиннадцатого 146 резисторов, с первым контактом диода 149, с «эммиторами» второго 134 и третьего 135 транзисторов, с четвертым контактом операционного усилителя 132 и является «общим проводом», первый 35 вход контроллера холодильника 21 соединен с первым контактом первого 136 резистора, второй контакт которого соединен с первым контактом второго 137 резистора и «базой» второго 134 транзистора, «коллектор» которого соединен со вторым контактом четвертого 139 резистора, первый контакт которого соединен с «базой» первого 133 транзистора и вторым контактом третьего 138 резистора, первый контакт которого соединен с «эмиттером» первого 133 транзистора, с пятым контактом ключевой схемы 131 и является питанием 27 В, причем первый 48 выход контроллера холодильника 21 соединен с первыми контактами третьего 152 конденсатора и девятого 144 резистора и четвертым контактом ключевой схемы 131, первый контакт которой соединен с первым контактом шестого 141 резистора, второй 49 вход контроллера холодильника 21 соединен с первыми контактами пятого 154 конденсатора, десятого 145 и одиннадцатого 146 резисторов и «базой» третьего 135 транзистора, «коллектор» которого соединен со вторыми контактами диода 149 и пятого 140 резистора, с первыми контактами первого 150 конденсатора и седьмого 142 резистора и со вторым контактом ключевой схемы 131, третий контакт которой соединен со вторым контактом восьмого 143 резистора и пятым контактом операционного усилителя 132, первый контакт которого соединен с первым контактом двенадцатого 147 резистора и вторым контактом операционного усилителя 132, седьмой контакт которого соединен с первым контактом тринадцатого 148 резистора и шестым контактом операционного усилителя 132, третий контакт которого соединен со вторым контактом десятого 145 резистора, причем «коллектор» первого 133 транзистора соединен с первым контактом пятого 140 резистора, первые контакты восьмого 143 резистора, второго 151 и четвертого 153 конденсаторов являются питанием 3.3 В и соединены с восьмым контактом операционного усилителя 132.
Контроллер межмашинного обмена (67, 68, 69, 70) содержит первый 157, второй 158, третий 159 узлы управления приемом, первый 160, второй 161, третий 162 регистры, триггер 163, машину состояний 164 (МС), узел управления передачей 165, первое 166, второе 167, третье 168, четвертое 169, пятое 170, шестое 171, седьмое 172, восьмое 173 двухпортовые ОЗУ, преобразователь шины 174, соединенный двунаправленной шиной данных 39 с КМО 67, адресная шина 40 которого соединена с адресными шинами первого 166, второго 167, третьего 168, четвертого 169, пятого 170, шестого 171, седьмого 172, восьмого 173 двухпортовых ОЗУ, выходные шины данных которых соединены с входной шиной данных преобразователя шины 174, выходная шина данных которого соединена с входными шинами данных первого 166, второго 167, третьего 168, четвертого 169, пятого 170, шестого 171, седьмого 172, восьмого 173 двухпортовых ОЗУ и входной шиной данных МС 164, адресные шины записи которой соединены с адресными шинами записи первого 166, второго 167, третьего 168, четвертого 169, пятого 170, шестого 171, седьмого 172, восьмого 173 двухпортовых ОЗУ, адресные шины чтения которых соединены с адресными шинами чтения МС 164, шины данных записи которой соединены с шинами данных записи первого 166, второго 167, третьего 168, четвертого 169, пятого 170, шестого 171, седьмого 172, восьмого 173 двухпортовых ОЗУ, входные управляющие шины которых соединены с управляющей шиной 41 КМО 67, группа выходов 97 которого соединена с группой выходов узла управления передачей 165, выход которого соединен с первым входом МС 164, управляющие группы выходов записи и управляющие группы выходов чтения которой соединены с первыми и вторыми группами входов первого 166, второго 167, третьего 168, четвертого 169, пятого 170, шестого 171, седьмого 172, восьмого 173 двухпортовых ОЗУ, причем первая группа выходов МС 164 соединена с группой входов узла управления передачей 165, первый вход которого соединен с первым выходом МС 164, второй, третий, четвертый, пятый выходы которой являются первым 90, вторым 91, третьим 92, четвертым 43 выходами КМО 67, первая 87, вторая 88, третья 89 группы входов которого соединены с первыми и вторыми входами первого 157, второго 158, третьего 159 узлов управления приемом, группы выходов которых соединены с первой, второй, третьей группами входов МС 164, четвертая, пятая, шестая группы входов которой соединены с группами выходов первого 160 регистра, второго 161 регистра, третьего 162 регистра соответственно, группы входов которых соединены со второй, третьей и четвертой группами выходов МС 164, шестой выход которой соединен с информационным входом триггера 163, выход которого соединен со вторым входом МС 164, третий, четвертый, пятый входы которой соединены с первыми выходами первого 157, второго 158, третьего 159 узлов управления приемом, вторые выходы которых соединены с шестым, седьмым, восьмым входами МС 164, девятый вход которой соединен с первыми входами первого 157, второго 158, третьего 159 узлов управления приемом, со вторым входом узла управления передачей 165, со сбросовым входом первого 160 регистра и является первым сигналом управляющей шины 41 КМО 67, первый вход 54 которого соединен с тактовыми входами первого 160, второго 161, третьего 162 регистров и триггера 163, со вторыми входами первого 157, второго 158, третьего 159 узлов управления приемом, третьим входом узла управления передачей 165 и десятым входом МС 164.
Узел управления передачей 165 содержит сдвиговый регистр 175, счетчик 176, дешифратор 177, триггер 178, первую 179 группу элементов И, вторую 180 группу элементов И, константу 181, первый 182 элемент И, второй 183 элемент И, первый 184 элемент ИЛИ, второй 185 элемент ИЛИ, сумматор 186 по mod 2, инвертор 187, выход которого является вторым сигналом группы выходов 97 узла управления передачей 165, первый сигнал которой соединен с выходом сдвигового регистра 175, группа входов которого соединена с первой 179 группой элементов И, группа входов Transmit_data которой соединена с группой входов сумматора 186 по mod 2 и является группой входов узла управления передачей 165, выход End_transmit которого соединен с триггером 178, информационный вход которого соединен с первым входом первого элемента ИЛИ 184 и первым выходом дешифратора 177, второй выход которого соединен с первым входом второго 185 элемента ИЛИ и вторым входом первого 184 элемента ИЛИ, выход которого соединен с информационным входом счетчика 176 и вторым входом второго 185 элемента ИЛИ, выход которого соединен с разрешающим входом триггера 178, тактовый вход которого соединен с тактовыми входами сдвигового регистра 175 и счетчика 176, первым входом первого 182 элемента И и является третьим 54 входом узла управления передачей 165, первый вход Transmit_en которого соединен с третьим входом первого 184 элемента ИЛИ и вторым входом первого 182 элемента И, выход которого соединен со входами первой 179 и второй 180 групп элементов И и третьим входом второго 185 элемента ИЛИ, причем второй вход 41 узла управления передачей 165 соединен со сбросовыми входами триггера 178, сдвигового регистра 175, счетчика 176, группа выходов которого соединена с группой входов дешифратора 177, первый выход счетчика 176 соединен со входом инвертора 187 и первым входом второго 183 элемента И, выход которого соединен с информационным входом сдвигового регистра 175, второй выход счетчика 176 соединен со вторым входом второго 183 элемента И, группа выходов константы 181 соединена с группой входов второй 180 группы элементов И, группа выходов которой соединена с группой входов счетчика 176, причем выход сумматора 186 по mod 2 соединен со вторым входом первой 179 группы элементов И.
Узел управления приемом (157,158,159) содержит первый 188, второй 189, третий 190 сдвиговые регистры, счетчик 191, дешифратор 192, группу элементов И 193, сумматор 194 по mod2, первый 195, второй 196, третий 197, четвертый 198, пятый 199, шестой 200, седьмой 201 триггеры, первый 202, второй 203, третий 204, четвертый 205, пятый 206, шестой 207, седьмой 208, восьмой 209, девятый 210 элементы И, первый 211, второй 212, третий 213, четвертый 214 элементы ИЛИ, выход которого соединен с информационным входом третьего 197 триггера, выход которого соединен со входом первого 211 элемента ИЛИ, выход которого соединен со сбросовым входом счетчика 191, группа выходов которого соединена с первым, вторым, третьим, первым инверсным, вторым инверсным входами восьмого 209 элемента И, выход которого соединен с информационным входом второго 196 триггера, выход которого соединен с информационным входом первого 195 триггера, выход которого соединен с первым входом первого 202 элемента И и информационным входом седьмого 201 триггера, выход которого является первым выходом Receive_en узла управления приемом 157, второй выход Receive_sum которого соединен с выходом сумматора 194 по mod2, группа входов которого соединена с группой выходов третьего 190 сдвигового регистра и группой входов группы элементов И 193, группа выходов которой является группой выходов Receive_dat узла управления приемом 157, группа входов 87 которого соединена с информационными входами первого 188 и второго 189 сдвиговых регистров, первый выход которого соединен с первыми входами пятого 206 и седьмого 208 элементов И, выход которого соединен с первым входом второго 212 элемента ИЛИ, выход которого соединен с информационным входом пятого 199 триггера, выход которого соединен с первым входом девятого 210 элемента И, выход которого соединен с информационным входом шестого 200 триггера, выход которого соединен с первым входом второго 203 элемента И, выход которого соединен с информационным входом третьего 190 сдвигового регистра, тактовый вход которого соединен с тактовыми входами первого 195, второго 196, третьего 197, четвертого 198, пятог 199, шестого 200, седьмого 201 триггеров, с тактовыми входами первого 188, второго 189 сдвиговых регистров и счетчика 191, со вторым входом первого 202 элемента И и является вторым 54 входом узла управления приемом 157, первый 41 вход которого соединен со сбросовыми входами первого 188 и второго 189 сдвиговых регистров, второго 196, третьего 197, пятого 199 и шестого 200 триггеров, с инверсным входом первого 211 элемента ИЛИ, с установочным входом четвертого 198 триггера, выход которого соединен со входом третьего 204 элемента И и инверсным входом четвертого 205 элемента И, выход которого соединен с информационными входами счетчика 191 и четвертого 198 триггера, со вторым входом второго 203 элемента И и первым входом третьего 213 элемента ИЛИ, выход которого соединен с разрешающим входом четвертого 198 триггера, причем группа выходов первого 188 сдвигового регистра соединена с группой входов дешифратора 192, первый и второй выходы которого соединены с первым и вторым входами четвертого 214 элемента ИЛИ, первый выход первого 188 сдвигового регистра соединен с первым инверсным входом третьего 204 элемента И и с первым входом четвертого 205 элемента И, второй вход которого соединен со вторым выходом первого 188 сдвигового регистра и со вторым инверсным входом третьего 204 элемента И, выход которого соединен со вторыми входами третьего 213 элемента ИЛИ и девятого 210 элемента И, второй выход второго 189 сдвигового регистра соединен со вторым входом пятого 206 элемента И и первым входом шестого 207 элемента И, выход которого соединен со вторым входом второго 212 элемента ИЛИ, третий вход которого соединен с выходом пятого 206 элемента И, третий выход второго 189 сдвигового регистра соединен со вторыми входами шестого 207 и седьмого 208 элементов И, выход первого 202 элемента И соединен со входом группы элементов И 193 и входом сумматора 194 по mod2.
ЭГСП с адаптивным управлением работает следующим образом. Функциональная схема канала адаптивного управления ЭГСП представлена на фиг.1. С задатчика 5 положения гидродвигателя входной сигнал управления через шину 32 МКО (мультиплексный канал обмена ГОСТ Р 52070-2003), через МКО-контроллер 18 [4], прерывающий 31 процессор 15, который осуществляет доступ к оперативной памяти PID-контролера 16, записывается в выделенную область двухпортового ОЗУ 114 (фиг.3) входной сигнал. Интерфейс, обеспечивающий доступ к двухпортовому ОЗУ содержит следующие сигналы:
А(18…0) - шина адреса 40;
D(15…0) - шина данных 39;
RW - режим чтения или записи («1» - чтение, «0» - запись) (второй сигнал третьей группы управляющих входов 41);
RE - разрешение чтения (третий сигнал третьей группы входов 41);
WE - разрешение записи (четветый сигнал третьей группы входов 41);
CS - выбор микросхемы (пятый сигнал третьей группы входов 41).
Сигнал P_RESET (фиг.3) (активный «0») предназначен для подачи сигнала сброс длительностью не менее 25 нс от процессора 15 (первый сигнал третьей группы входов 41) и устанавливает PID-контроллер 16 в исходное состояние.
Структура области двухпортового ОЗУ 114 PID-контроллера 16 представлена на фиг.8.
Слово режимов и признаков состоит из следующих разрядов:
- с 0-го (младший) по 2-й разряды - резерв;
- 3-й разряд - режим подачи сигнала «RESET» на микроконвертер 19 («1» - режим выбран, «0» - режим не выбран);
- с 4-го по 7-й разряды - резерв;
- с 12-го по 8-й разряды - количество (от 1 до 32) принятых байт в обмене (количество 32 кодируется кодом «00000»);
- 13-й разряд - режим - признак начала процесса обмена («1» - режим выбран, «0» - режим не выбран) (автоматически становится равным значению режима циклического обмена после завершения очередного обмена);
- 14-й разряд - режим циклического обмена («1» - режим выбран, «0» - режим не выбран);
- 15-й (старший) разряд - признак завершения обмена («1» - признак установлен, «0» - признак не установлен).
Взаимодействие микроконвертера 19 и PID-контроллера 16 осуществляется по 5-проводному интерфейсу, представленному на фиг.9.
Сигнал RESET (первый сигнал группы выходов 34) может быть установлен в активное состояние в любой момент времени с целью приведения микроконвертера 19 в начальное состояние и прекращения текущего обмена, длительность данного сигнала определяется временем, необходимым для установки микроконвертера 19 в начальное состояние.
Установка сигнала INT_TMS (второй сигнал первой группы входов 33) в «1» информирует PID-контроллер 16 о том, что он может начать передавать байты в микроконвертер 19, который в свою очередь должен передавать байты в PID-контроллер 16. Передачей каждого байта управляет микроконвертер 19, инициируя передачу С1…CN сигнала SCLK.
Число байт в одном обмене N должно быть в диапазоне от 2 до 32.
Диаграмма взаимодействия микроконвертера 19 и PID-контроллера 16 представлена на фиг.10.
Время обнаружения микроконвертером 19 факта потери байта (В) зависит от его скорости реакции.
Установка сигнала INT_TMS в «0» информирует PID-контроллер 16 о том, что обмен завершен, и PID-контроллер 16 не может продолжать передавать и принимать байты.
PID-контроллер 16 не принимает байты после 32-го, при установленном сигнале INT_TMS в «1». После установки сигнала INT_TMS в «0» PID-контроллер 16 фиксирует факт окончания обмена и готов к следующему обмену.
C1…CN содержит тактовый импульс, информирующий о передаче каждого разряда байт T1…TN и R1…RN, Сигнал SCLK между C1…CN равен «0».
Временная диаграмма приема/передачи данных между микроконвертером 19 и PID-контроллером 16 представлена на фиг.11.
Частота тактового импульса F сигнала SCLK зависит от микроконвертера 19 и определяется его скоростными параметрами (F=1,428 МГц). Функциональная схема PID-контроллера 16 представлена на фиг.3. Алгоритм работы машины состояний 113 PID-контроллера 16 представлен на фиг.12, фиг.12а, фиг.12б, фиг.12в, фиг.12г, фиг.12д, фиг.12е, фиг.12ж, фиг.12з.
По сигналу P_RESET из процессора 15 (первый сигнал второй 41 группы выходов) PID-контроллер 16 устанавливается в исходное состояние: регистр состояний 110 устанавливается во все «1», инициализируется регистр режимов 111 (0000000000001000) остальные триггера, регистры и счетчики устанавливаются в «0» и через первый 125 элемент ИЛИ формируется сигнал RESET (первый сигнал группы выходов 34), затем регистр состояний 110 переходит в следующее состояние по сигналу P_CLOCK. В нулевом, первом и втором состоянии выполняется чтение регистра режима по адресу «01000000», анализируется 13-й разряд (режим - признак начала обмена), если 13-й разряд равен «0», то в регистр состояния «state» записываются все «0» и начинается следующий опрос 13-го разряда, если 13-й разряд равен «1», то переходим в следующее состояние.
В состоянии «три», «четыре», «пять» выполняется чтение слова данных по адресу (12…8) регистра режима «mode» 111 с младшим разрядом, равным «0», и запись считанного слова в регистр «DAT» 112.
В состоянии «шесть» формируется сигнал «TRANDAT_ENABLE», по которому содержимое регистра «DAT» 112 переписывается во второй сдвиговый регистр 118, выполняется сброс первого счетчика 115, второго счетчика 116 и триггера 123.
В состоянии «семь», «восемь», «девять» выполняется запись проинвертированных данных в ячейку двухпортового ОЗУ 114 по адресу (12…8) регистра «mode» 111 с младшим разрядом «0» и чтение слова режима и его анализ. Если третий разряд регистра «mode» 111 равен «1» (есть RESET) или (регистр «mode» (12…8) разряды не равны «00000» (не нулевое слово) и сигнал прерывания S_INT_TMS (второй сигнал первой группы входов) равен «0»), то в регистр состояний 110 заносится код «1111», иначе если первый счетчик 115 насчитывает 8 бит, то формируется сигнал «RECDAT_ENABLE», по которому принятое слово в первом сдвиговом регистре 117 записывается в регистр «DAT» 112, если состояние первого счетчика 115 не равно 8 (SCLK_front не равен «1000»), то переход в состояние семь.
В состоянии «десять» выполняется запись принятого слова в ячейку ОЗУ по адресу, равному значению счетчика адреса регистра «mode» 111 (12…8) с младшим разрядом «1», затем регистру «mode» 111 (12…8) присваивается значение счетчика адреса («mode» 111 (12…8)+1) в машине состояний 113, если счетчик адреса «mode» 111 (12…8) равен «11111», то выполняется переход на состояние «одиннадцать», а иначе в состояние «три».
В состоянии «одиннадцать» выполняется чтение слова режима и его анализ. Если есть RESET или (счетчик адреса «mode» 111 (12…8) не равен нулю и сигнал INT_TMS равен «0»), то в регистр состояний 110 заносится код «1111», иначе переходим в состояние «одиннадцать» (ждем когда сигнал прерывания установится в «0»).
В состоянии «пятнадцать» в регистр «mode» 111 (режим) в 15-й разряд записывается «1», которая определяет «признак завершения обмена».
Если между битами недопустимая пауза, то второй счетчик 116 переполнится и сбросит первый счетчик 115.
Данные, поступающие из PID-контроллера 16 в микроконвертер 19, содержат следующую информацию:
- величина заданного положения горизонтального оперения (UвхРП) с 0-го по 15-й разряды;
- командное слово:
- включение УМ 6-13-й разряд;
- разрешение управлением холодильника - 11-й разряд;
Данные, поступающие из микроконвертера 19 в PID-контроллер 16, содержат следующую информацию:
- величина текущего положения горизонтального оперения (ДОС 4 гидродвигателя) - с 0-го по 15-й разряды;
- сигнал рассогласования внешнего контура с 0-го по 15-й разряды;
- сигнал ДПТ 13 РМ - с 0-го по 15-й разряды;
- слово разовых команд 1:
- исправность холодильника 19-15-й разряды;
- исправность ДОС 4 гидродвигателя - 14-й разряд;
- исправность ДПТ 13 РМ - 13-й разряд;
- исправность УМ 6 - 11-й разряд;
- слово состояния ЭГСП:
- холодильник 20 включен - 15-й разряд;
- состояние питания холодильника 20 - 14-й разряд;
- УМ 6 включен по команде из МКО - 13-й разряд;
- состояние питания УМ 6 - 11-й разряд;
- отказ МКО-контроллера 18 - с 17-го по 10-й разряды;
- отказ микроконвертера 19 - с 18-го по 9-й разряды;
- счетчик перезапуска - с 0-го по 2-й разряды.
Адаптивное управление ЭГСП обеспечивается микроконвертером 19 ADuC841 с тактовой частотой 16,77 МГц. Основные технические характеристики микроконвертером 19 ADuC841:
- микропроцессорное ядро 8052 с пиковой производительностью 20 MIPS и системой команд 8051;
- флэш-память (62 Кбайт - программная память и 4 Кбайт - память данных) на кристалле с возможностью перепрограммирования до 100000 раз;
- ОЗУ данных 2304 байт на кристалле;
- высокоскоростной АЦП 8 каналов 12 разрядов со встроенным источником опорного напряжения и возможностью работы в режиме прямого доступа к памяти;
- два ЦАП 12 разрядов с возможностью работы в режиме широтно-импульсной модуляции;
- встроенный датчик температур;
- интервальный таймер;
- асинхронный последовательный приемопередатчик UART;
- последовательный интерфейс I2C/SPI;
- сторожевой таймер;
- монитор питания.
Частота дискретизации F0=500 Гц (Т0=2 мс). Для оцифровки аналоговых сигналов в микроконвертере 19 предусмотрены 12-разрядные АЦП и ЦАП, расчитанные для диапазона входных сигналов 10 В. Учет эффектов квантования сигналов по уровню производиться не будет, так как при заданной разрядности АЦП и ЦАП действие данных факторов незначительно. Если в цифровой системе управления период дискретизации Т0 удовлетворяет условию  (ωп=50 Гц), то адаптивный регулятор выбираем с эталонными моделями (ЭМ). Структурная схема алгоритма адаптивного управления ЭГСП представлена на фиг.13. Структурная схема адаптивного управления состоит из двух контуров позиционирования - внутреннего и внешнего. Внутренний контур позиционирования включает в себя адаптивный регулятор с ЭМ для сервопривода. Внешний контур позиционирования включает в себя регулятор с ЭМ для привода.
(ωп=50 Гц), то адаптивный регулятор выбираем с эталонными моделями (ЭМ). Структурная схема алгоритма адаптивного управления ЭГСП представлена на фиг.13. Структурная схема адаптивного управления состоит из двух контуров позиционирования - внутреннего и внешнего. Внутренний контур позиционирования включает в себя адаптивный регулятор с ЭМ для сервопривода. Внешний контур позиционирования включает в себя регулятор с ЭМ для привода.
Адаптивные регуляторы с ЭМ обеспечивают уменьшение разброса внутренних параметров привода (сервопривода), компенсируют влияние позиционной нагрузки, давление рабочей жидкости, изменение температуры, погрешность серийного производства.
На вход адаптивного регулятора с ЭМ для привода (сумматор 251, усилитель 252, ограничитель 253 и интегратор-усилитель 254) поступает Uвх (сигнал задания ЭГСП), а также сигнал 37 с датчика перемещения выходного звена гидропривода. В адаптивном регуляторе происходит сравнение (сумматор 255) желаемого перемещения штока привода, которое задается ЭМ первого порядка, с его действительным перемещение, формируя таким образом ошибку «е». Адаптивный сигнал АР1 вырабатывается на основе как самой ошибки «е», так и ее производной. Производная от ошибки «е» вычисляется при помощи реального интегродифференциального фильтра (усилитель 256, инерционно форсирующее звено 257, ограничитель 258, усилитель 259).
На вход адаптивного регулятора с ЭМ для сервопривода (сумматор 225, усилитель 226, ограничитель 227, сумматор 228) поступает сигнал АР2, сформированный из Uвх (сигнал задания ЭГСП), просуммированного на сумматоре 215 с сигналом 37 с датчика перемещения выходного звена гидропривода усиленного 216 и просуммированного на сумматоре 217 с адаптивным сигналом АР1 и ограниченного по скорости 218. В адаптивном регуляторе с ЭМ для сервопривода (сумматор 225, усилитель 226, ограничитель 227, сумматор 228, интегратор-усилитель 229, сумматор 230, усилитель 231, ограничитель 236) происходит сравнение (сумматор 230) сигнала АРЗ с сигналом 46 с ДПТ13 положения штока РМ, которое задается ЭМ первого порядка, формируя таким образом ошибку «d». Адаптивный сигнал АР4 вырабатывается на основе как самой ошибки «d», так и ее производной. Производная от ошибки «d» вычисляется при помощи интегродифференциального фильтра (усилитель 232, инерционно форсирующее звено 233, ограничитель 234, усилитель 235). Адаптивный сигнал АР2, просуммированный с сигналом 46 с ДПТ 13 положения штока РМ и с сигналом АР4, через усилитель 220 и ограничитель 221 поступает на фильтр для подавления импульсных помех (триггеры 222, 223, фильтр 224), а затем на выход 29 микроконвертера 19. Далее сигнал управления через элемент 22 ИЛИ и УМ 6 поступает в обмотку управления 8 ЛЭД 9, вызывая пропорциональное сигналу управления смещение от нейтрального положения якоря и непосредственно соединенного с ним золотника РМ 11. Рабочая жидкость под давлением через открытые щели в золотнике поступает в камеры двухсистемной РМ 12, перемещая шток РМ и связанный с ним сдвоенный золотник 2, который управляет перемещением сдвоенного исполнительного гидродвигателя 3, положение которого измеряется ДОС 4, установленным на штоке сдвоенного исполнительного гидродвигателя 3. Выходное напряжение с ДОС 4 поступает на вход второго 24 усилителя, с выхода которого поступает на второй вход 37 микроконвертера 19, образуя, таким образом, замкнутый контур ЭГСП. Выходное напряжение с ДПТ 13 РМ поступает на вход третьего 25 усилителя, с выхода которого поступает на четвертый 46 вход микроконвертера 19. Следящий привод РМ образует внутренний контур ЭГСП. Анализ амплитудно-фазовых частотных характеристик (АФЧХ) РМ представленных на фиг.14 и фиг.15 свидетельствует о достаточной эффективности адаптивных алгоритмов управления привода (фиг.13), обеспечивающих при изменении уровня давления Рн=20÷27 МПа практически стабильные АФЧХ привода, что не требует использования в алгоритмах (фиг.13) коррекции величин его параметров по информации об уровне Рн. Из анализа характеристик, представленных на фиг.16, следует, что при Рн=27 МПа АФЧХ привода практически не зависят от нагружения штока привода. При снижении уровня давления до Рн=20 МПа в полосе частот до 5 Гц АФЧХ привода практически не зависят от нагружения на его штоке и только в районе с частотой T≥10 Гц имеет место незначительное уменьшение коэффициента передачи привода. Поскольку в цифровых системах управления физически всегда присутствует временное запаздывание на выработку и выдачу управляющего сигнала, а данное запаздывание может оказывать существенное влияние на динамические свойства адаптивной системы с сигнальной настройкой, то в модели цифровых адаптивных сервоприводов вводится звено чистого запаздывания. Величина данного запаздывания выбирается порядка Т=0,1·Т0 для заданной частоты дискретизации, что должно быть обеспечено при аппаратной и программной реализации цифровой системы управления, и является достаточной для приемлемого качества адаптивного управления в рамках заданных изменений характеристик объекта управления.
В данном изобретении вводится два вида контроля - аппаратный контроль и контроль корректирующего устройства с моделью. Встроенный контроль необходим для своевременного обнаружения и отключения неисправного устройства в процессе его работы при появлении отказов в элементах привода и во взаимодействующих с ним системах. Для этого необходимо определить устройство, в котором произошел отказ на возможно меньшем энергетическом уровне, и отключить его. В данном изобретении проводится непрерывный контроль работоспособности каналов управления привода и его отдельных элементов с формированием признака исправности:
- ДОС 4. Входной сигнал 38 с ДОС 4 поступает на модель компаратора 247 и задержки 248, если он попадает в диапазон напряжения, установленного для контроля, то датчик считается исправным, в противном случае датчик неисправен;
- ДПТ 13. Входной сигнал 47 с ДПТ 13 РМ поступает на модуль компаратора 249 и задержки 250, если он попадает в диапазон напряжения, установленного для контроля, то датчик считается исправным, в противном случае датчик неисправен;
- УМ 6. Входной сигнал 28 «контроль тока» на модели усиливается 242, ограничивается 243 и сравнивается 244 с выходным сигналом 29, поступающим через реально дифференцирующее звено 237, результат сравнения поступает через реально дифференцирующее звено 245 на модель компаратора 246 и если он попадает в диапазон напряжения установленного для контроля, то УМ 6 исправен, в противном случае УМ 6 неисправен.
Если любой из этих признаков отсутствует, то через элемент 22 блокируется работа УМ 6.
Корректирующее устройство 14 с ЭМ, содержащее процессор 15 и PID-контроллер 16, параллельно решает эту же задачу, затем микроконвертер 19 сообщает результат решения этой задачи (сигнал рассогласования внешнего контура). Результаты сравниваются (элемент 285) в процессоре 15 и если они не равны, то процессор 15 блокирует работу УМ 6. Структурная схема алгоритма адаптивного управления ЭГСП в корректирующем устройстве с моделью 14 представлена на фиг.19.
Методика расчета адаптивной системы управления ЭГСП разработана на примере цифровой системы управления. Методику построения адаптивной системы с указанным алгоритмом адаптации можно разбить на два этапа.
На первом этапе разработчик должен определиться со структурой адаптивного регулятора, то есть из соображений описанных ниже, делает выбор между схемами регулятора с ЭМ или с настраиваемой моделью, а также задает их порядки. Далее следует непосредственный расчет параметров адаптивного регулятора на основе выбранной структуры. В общем случае невозможно обозначить строгие правила выбора структуры адаптивного регулятора. Здесь можно только лишь исходить из каких-либо практических соображений, например, допустимой сложности системы управления, и из результатов работы самой адаптивной системы, то есть если ее показатели качества не удовлетворяют заданным требованиям, а возможности параметрической настройки исчерпаны, что относится уже ко второму этапу, то следует обратить внимание на другую структуру регулятора. Таким образом, два указанных этапа построения могут быть замкнуты в единый цикл с перебором возможных вариантов структур адаптивного регулятора до достижения требуемых результатов.
На первом этапе построения адаптивного регулятора можно руководствоваться следующими общими рекомендациями. Пусть модель объекта управления - ЭГСП или сервопривод - имеет порядок n, известна полоса пропускания объекта управления ωп (ωп=50 Гц).
1. Если в цифровой системе управления период дискретизации Т0 удовлетворяет условию  , то в данном случае рекомендуется выбрать схему с ЭМ n-го порядка.
, то в данном случае рекомендуется выбрать схему с ЭМ n-го порядка.
2. Если в цифровой системе временное запаздывание Т не находится в границах 0,2·Т0<Т<Т0, то рекомендуется выбирать схему с ЭМ n-го порядка.
3. Если в объекте управления не наблюдаются ярко выраженные колебательные процессы, то следует также ориентироваться на схему с ЭМ n-го порядка.
4. Если в объекте управления отсутствуют ярко выраженные колебательные процессы, но величина перерегулирования более 5%, выбираем схему с ЭМ n-го порядка.
Таким образом, выбираем адаптивный регулятор с ЭМ. На фиг.17 представлен алгоритм построения адаптивного регулятора по второму этапу.
Рассмотрим отдельно в целях синтеза адаптивного управления модель контура сервопривода в виде структурной схемы на фиг.18.
Объект управления представлен системой 4-го порядка, в котором ТОС≈10·ТЛЭД, Тлэд≈(5÷7)·Ткт, то есть без существенной потери в точности описания динамических характеристик сервопривода для упрощения структуры адаптивного регулятора ЭМ можно задать в виде звена второго порядка (фиг.19). Электронная часть привода и модель ЛЭД представляются инерционными звеньями первого порядка с постоянными времени Тлэд, Ткт.
Правомерность такого упрощения также подтверждают переходные процессы, приведенные на фиг.20, где кривая 1 относится к нелинейной модели сервопривода (фиг.18) при работе в области больших сигналов задания, а кривая 2 соответствует упрощенной линейной модели 2-го порядка (фиг.19).
Нелинейный и нестационарный объект управления описывается уравнениями:
 ,
,
y(t)=C·x(t),
где x(t)∈Rn - вектор состояния объекта управления, U(t)∈R1 - сигнал управления, y(t) - вектор выходов, f(t)∈Rn - вектор внешних возмущений, A(t,x)∈Rn×n - функциональная матрица состояния, B(t)∈Rn×1 - функциональная матрица управления, С - коэффициент передачи, связывающий вектор выходов с вектором состояния объекта управления.
Закон управления задается в виде:
U(t)=G(t)+z(t),
где G(t) - задающее воздействие, z(t) - адаптивная составляющая сигнала управления.
Адаптивный регулятор с эталлонной моделью строится в соответствии со следующими уравнениями:

где хм(t)∈Rn - вектор состояния ЭМ объекта управления, G(t)∈R1 - сигнал управления ЭМ, Ам∈Rn×n - постоянная линейная функциональная матрица состояния ЭМ, ВМ∈Rn×1 - постоянная линейная функциональная матрица управления ЭМ.
Согласно структурной схеме на фиг.19 в описании ЭМ соответствующие матрицы имеют вид:

при условии xM=[xM1, хМ2]T, xM1=хРМ - желаемое перемещение выхода сервопривода, xM2 - желаемая скорость перемещения выхода сервопривода. Здесь предполагается, что коэффициенты передачи ДОС объекта управления имеют единичную передачу, в противном случае их следует учесть соответствующим образом в матрице С.
Поскольку динамические характеристики ЭМ определяют желаемую динамику адаптивной системы, то есть задаются разработчиком, то выберем параметры характеристического полинома ЭМ на основе одной из стандартных форм распределения корней полинома, например,
квадратичной формы:  , где p - оператор дифференцирования, ω0 - задает быстродействие модели. Требуемое быстродействие сервопривода уже было заложено на стадии его разработки схемотехническими мероприятиями и штатной системой управления и не требует дальнейшей коррекции. Вследствие этого быстродействие ЭМ выбирается сопоставимым с быстродействием сервопривода, то есть время регулирования ЭМ: tрЭМ≈0-02 с, откуда
, где p - оператор дифференцирования, ω0 - задает быстродействие модели. Требуемое быстродействие сервопривода уже было заложено на стадии его разработки схемотехническими мероприятиями и штатной системой управления и не требует дальнейшей коррекции. Вследствие этого быстродействие ЭМ выбирается сопоставимым с быстродействием сервопривода, то есть время регулирования ЭМ: tрЭМ≈0-02 с, откуда  .
.
Формирование адаптивного управляющего воздействия осуществляется согласно формулам:
е(t)=х(t)-хМ(t),

где Р∈Rn×n - симметричная положительно определенная матрица, являющаяся решением матричного уравнения Ляпунова:

где Q - произвольная симметричная положительно определенная матрица (Q=QT>0}, h - некоторый положительный коэффициент, характеризующий способность адаптивного регулятора подавлять возмущающие воздействия. Назначим положительно определенную матрицу Q в виде:
 ,
,
где q1, q2>0 - произвольные постоянные величины. Тогда квадратную симметричную матрицу Р будем искать в виде:
 , где p11, p12, p22>0.
, где p11, p12, p22>0.
Решая уравнение Ляпунова  , получаем:
, получаем:

В окончательном виде уравнения адаптивного регулятора с ЭМ можно представить в виде:


где x1=ХРМ - перемещение штока сервопривода, x2 - скорость перемещения штока сервопривода.
Предлагаемый алгоритм адаптивного управления требует наличия информации о скорости перемещения выходного звена сервопривода. В штатной системе управления данная переменная измерению не доступна. Для реализуемости уравнения (5) информация о скорости может быть получена либо при помощи реального дифференцирования сигнала с датчика перемещения штока сервопривода, данный способ и будет использован в работе для простоты реализации адаптивного регулятора, либо же она (информация о скорости) может быть восстановлена при помощи стационарного наблюдателя. Несмотря на то, что в последнем варианте происходит существенное усложнение структуры адаптивного регулятора, однако в такой схеме можно потенциально достичь более высоких показателей системы управления, например, за счет введения связей по дополнительно восстановленным переменным.
При практической реализации знаковая функция «sign(•)» заменяется функцией насыщения с некоторым коэффициентом усиления. Величина данного коэффициента усиления подбирается экспериментально: меньшему значению соответствует низкая скорость протекания адаптивных процессов, большее значение ограничено требованием сохранения устойчивости адаптивной системы, так как в этом случае начинает оказывать влияние неучтенная в ЭМ и, соответственно, в адаптивном регуляторе малая динамика сервопривода.
Выбор положительного коэффициента h в уравнение (5) также следует производить экспериментальным способом. В общем случае величина данного параметра задает меру адаптивного управления по отношению к нелинейным и нестационарным возмущающим воздействиям.
Таким образом, на основании схем фиг.18, фиг.19, а также уравнений (1-5) может быть построен адаптивный сервопривод с ЭМ и сигнальной настройкой, структурная схема которого приведена на фиг.21.
Дополнительным преимуществом изобретения по сравнению с прототипом является возможность работы радиоэлектронной аппаратуры (РЭА) в температурном диапазоне окружающей среды, превышающей предельно допустимую температуру окружающей среды для микросхем на 15÷20°С.
Аппаратура находится в жестких температурных условиях (перепад температур до 105°С).
С целью исключения вредного влияния такой температуры на РЭА сделана конструкция типа термоса, в которой между внутренним и внешним корпусом расположен термоизоляционный материал.
Для сброса выделенного тепла РЭА на внешний корпус предназначен холодильник 20 (элемент «Пельтье» [5]), который осуществляет передачу тепла от внутреннего корпуса на внешний по команде «Вкл. Холодильник» из микроконвертера 19.
Введение холодильника 20 приближает цифровую часть канала адаптивного управления к следящему приводу, уменьшая сопротивление проводников, как от ДОС, так и от УМ, что приводит к повышению точности управления.
Контроллер холодильника 21 предназначен для включения холодильника 20 и формирования сигналов состояния холодильника. Схема электрическая контроллера холодильника 21 представлена на фиг.4.
Команда управления, поступающая на первый 35 вход включает второй 134 транзистор и первый 133 транзистор, резисторы 136…141 обеспечивают режимы включения транзисторов. В результате на втором контакте ключевой схемы 131 формируется управляющее воздействие, инициирующее подачу питания на холодильник 20 по цепям первый 48 выход и второй 49 вход.
Сигнал с выходного контакта три ключевой схемы 131 поступает на операционный усилитель 132, на выходном контакте семь которого формируется первый сигнал группы выходов 36 «холодильник включен».
Сигнал второй 49 вход, проходя через резистор 146, в зависимости от тока создает падение напряжения, которое поступает на третий вход операционного усилителя 132, формируя на первом выходе второй сигнал группы выходов 36 «ток в норме».
Система адаптивного управления ЭГСП работает следующим образом.
Для обеспечения безотказности рулевых приводов маневренных самолетов необходимо обеспечить выполнение следующих условий.
1. Отсутствие зазоров (люфтов) в механических передачах от выходных звеньев регулирующих элементов привода, таких как сервопривод золотника основного гидрораспределителя, датчиков перемещений подвижных элементов привода и т.п.
2. Обеспечение устойчивости собственно привода в области малых сигналов. Отметим, что потеря устойчивости привода - является отказом привода.
3. Выполнение требований к скоростным характеристикам сервопривода и исполнительного механизма привода (гидродвигателя) в области малых сигналов. Компоновочной схемой привода, обеспечивающей выполнение первого из условий и способствующей выполнению второго условия, является схема интегрированной компоновки, в соответствии с которой исполнительный механизм сервопривода (линейный электродвигатель 9 (ЛЭД), сдвоенный золотник рулевой машинки 11 (РМ), РМ 12, датчики постоянного тока (ДПТ) РМ 13, 61, 62, 63) и основной гидрораспределитель (сдвоенный золотник гидродвигателя (ГД) 2, ГД 3 объединены в один конструктивно законченный блок. Такая компоновка обеспечивает отсутствие зазора в механическом соединении золотника основного золотникового распределителя и выходного звена сервопривода. Функциональная схема системы адаптивного управления электрогидравлическим следящим приводом (ЭГСП) представлена на фиг.2. Приведенная на этой фиг.2 функциональная схема рулевого привода соответствует исполнительному двухканальному механизму силового привода, получающего гидравлическое питание от двух независимых гидросистем, и четырехканальному электрогидравлическому сервоприводу золотника 11 основного гидрораспределителя. Выходное звено сервопривода - рулевой машины 12 - жестко соединено с золотником 11 основного гидрораспределителя. При этом РМ 12 и основной гидрораспределитель 11 выполняются в виде единого конструктовно законченного элемента. При такой компановке рулевого привода его гидродвигатель (гидроцилиндр) связан с золотниковым 11 гидрораспределителем только гидравлическими магистралями. Четырехканальные электрические обратные связи по положению выходного звена РМ и гидродвигателя (ГД) образуют соответственно внутренний контур управления - позиционный контур сервопривода и внешний контур управления - позиционный контур рулевого привода. Дальнейший синтез функциональной схемы рулевого привода проводится в направлении определения необходимиого количества резервных гидравлических каналов исполнительного силового механизма, сервопривода и электрических цепей управления, а также структуры системы встроенного контроля, обеспечивающих требуемую безотказность привода.
Рассмотрим требования, которые предъявляются к безотказности рулевых приводов маневренного самолета на примере рулевых приводов горизонтального оперения и переднего горизонтального оперения.
Горизонтальное оперение (ГО) и переднее горизонтальное оперение (ПГО) являются теми рулевыми поверхностями маневренного самолета, отказ управления которыми приводит к катастрофическим последствиям даже при правильных действиях летчика. Поэтому к безотказности приводов этих рулевых поверхностей предъявляются наиболее высокие требования, а сами приводы относятся к категории особо важных подсистем самолета. Приводы рулевых поверхностей взаимодействуют с системой электродистанционного управления полетом (СДУ) по каналам управления и с энергетическими системами самолета соответственно по каналам электропитания и гидропитания. Поэтому общая совокупность требований к надежности рулевых приводов должна учитывать вероятность появления отказов в элементах не только собственно рулевого привода, но и во взаимодействующих с ним системах самолета. Указанный подход использован при формировании комплекса требований к безотказности управления маневренными отечественными самолетами. Приведенные в нормативных документах требования к безотказности систем управления полетом оказывают существенное влияние на схему и конструкцию рулевых приводов. Рассмотрим основные требования применительно к рулевым приводам ГО и ПГО маневренного самолета.
Критерием надежности и, в часности, безотказности привода указанных рулевых поверхностей маневренного самолета принимается вероятность отказа, приводящего к возникновению предпосылки к катастрофе самолета. Эта вероятность задается величиной [Fk]<10-7 за один час полета.
Для обеспечения безотказности системы управления полетом в системе адаптивного управления ЭГСП необходимо использовать следующие уровни резервирования:
- дублирование всех гидравлических элементов, гидравлических трактов преобразования сигналов и источников гидропитания;
- четырехканальные тракты преобразования и передачи всех электрических сигналов.
Дублированный исполнительный силовой механизм рулевого привода, использующий принцип суммирования усилий на общем выходном звене, работает в режиме определенного уровня взаимонагружения силовых каналов (камер гидродвигателей), возникающего вследствие несинхронного открытия (закрытия) рабочих окон основного золотникового распределителя. Это, в свою очередь, может приводить к существенному искажению процессов управления выходным звеном привода. Одним из возможных эффективных способов решения проблемы взаимонагружения каналов силового исполнительного механизма рулевого привода с одновременным обеспечением требований к его скоростной характеристике является применение дублированного (двухсистемного) гидрораспределителя (ЗР). Рабочие окна в таком гидрораспределителе могут быть либо в виде прямоугольных окон в гильзе гидрораспределителя, либо в виде перфорированных отверстий малого диаметра (0,7-0,8 мм), расположенных по винтообразной образующей на поверхности гильзы. Дополнительно по отсечным кромкам золотникового гидрораспределителя каждые камеры гидродвигателя вводится отрицательные перекрытия, соответствующие величине 0,1÷0,15 от диаметра указанных ранее отверстий. Такое решение позволяет в условиях серийного производства практически исключить взаимонагружение каналов исполнительных механизмов дублированного рулевого привода и обеспечить требуемые скоростные характеристики в области малых сигналов. Выходное звено рулевой машинки связывается с дублированным золотником основного гидрораспределителя жестким штоком без зазора с обеспечением компенсации несоосности технологических сопрягаемых деталей.
Учитывая, что в системе СДУ и электронной части привода используется четырехкратное резервирование трактов управления и дублирование гидравлических систем питания, необходимым условием обеспечения требуемой безотказности сервопривода является возможность его эффективной работы при отказе любой гидросистемы с любым количеством электронных трактов управления (от одного до четырех). Это условие выполняется при введении в состав сервопривода четырех исполнительных электрогидравлических механизмов, скомплектованных как минимум по две пары, которые получают гидравлическое питание от двух независимых бортовых гидросистем. Указанные исполнительные механизмы сервопривода объединяются по принципу суммирования усилий на общем выходном звене. Схема технического решения, обеспечивающего указанный выше уровень безотказности показана на фиг.2. На этой же фигуре показаны элементы схемы встроенного самоконтроля каждого из четырех каналов сервопривода, использующих как мажоритарную логику с помощью кворум-элементов (КЭ), так и электронные модели сервопривода, перемещающего золотник основного гидрораспределителя.
Использование принципа суммирования усилий на одном общем выходном звене сервопривода неизбежно приводит к необходимости решения проблемы уменьшения взаимонагружения исполнительных механизмов сервопривода. Эта проблема усугубляется технологическим разбросом сигналов управления в электрических трактах системы управления. В то же время суммирование сил на общем выходном звене сервопривода обеспечивает блокировку активного отказа в одном из его каналов, увеличивает жесткость сервопривода как элемента конструкции рулевого привода, но из-за технологического разброса сигналов управления, параметров и регулировок электрогидравлических усилителей мощности возникают процессы силового взаимодействия каналов друг на друга. Это обстоятельство приводит к искажению процессов управления. В исполнительных силовых механизмах (гидродвигателя), как было отмечено выше, эта проблема решается повышением точности изготовления золотниковых распределителей. В многоканальных электрогидравлических сервоприводах, управляющих положением золотников основных гидрораспределителей, требуются дополнительные меры по выравниванию сил, действующих в гидроцилиндрах каналов рулевой машины.
Наиболее перспективной с точки зрения обеспечения требуемого уровня безотказности управления и надежности конструкции является структура привода с непосредственным управлением золотником гидрораспределителя.
В электрогидравлическом приводе предлагается осуществить непосредственное управление дублированным золотником гидрораспределителя от линейного преобразователя сигналов. Этот линейный электродвигатель - преобразователь условно назван ЛЭД 9.
Проблема выравнивания сил в гидроцилиндрах сервопривода решается технологически - точностью изготовления рабочих окон сдвоенного гидрораспределителя.
Следует отметить дополнительные достоинства такого привода, кроме указанных выше положительных особенностей функциональной схемы и конструкции:
- обеспечение высокой надежности системы «ЛЭД + гидрораспределитель + исполнительный механизм сервопривода». Интенсивность отказа этого тракта находится на уровне 10-8 1/ч, что соответствует практически невероятному событию;
- при появлении отказов отключение неисправимых каналов сервопривода (обмоток управления ЛЭД 8, 55, 56, 57) происходит на малом энергетическом уровне. Поэтому процесс отключения неисправного канала длится не более 10-15 мс. Такой быстротекущий процесс не сказывается на движении выходного звена привода и слабо влияет на изменение нормальной перегрузки самолета при отказе одного из каналов;
- в сервоприводе отсутствуют непроизводительные потери рабочей жидкости через элементы «сопло-заслонка» или «струйная трубка», присущие традиционным электрогидравлическим усилителям мощности.
При разработке описанного выше сервопривода с непосредственным управлением приходится решать проблему обеспечения требуемых статических и динамических характеристик сервопривода в области малых сигналов. Эта проблема возникает из-за нелинейности характеристик самого преобразователя ЛЭД 9. Последнее обстоятельство является особенно важным при разработке рулевых приводов маневренных самолетов со статически неустойчивыми компановками. В рулевых приводах таких самолетов требуется обеспечить сравнительно малые амплитудные и фазовые искажения частотных характеристик при амплитудах входных сигналов, соответствующих 0,1% от максимального, что соответствует перемещению выходного звена сервопривода (перемещению двухсистемного золотника гидрораспределителя) на велечину примерно 0,005 мм. Нелинейность характеристик в области малых сигналов приводит к искажению частотных характеристик. Указанные выше обстоятельства обуславливают необходимость коррекции характеристик электрогидравлического сервопривода с ЛЭД 9. Учитывая, что указанные нелинейности характеристик сервопривода с ЛЭД 9 зависят от условий его эксплуатации и от уровня управляющих сигналов, становится целесообразным применение адаптивных регуляторов, позволяющих обеспечить высокую стабильность характеристик при изменении параметров системы, а в некоторых случаях - обеспечить заранее заданные динамические характеристики.
Контроллер межмашинного обмена работает следующим образом. Функциональная схема КМО представлена на фиг.5.
Алгоритм работы машины состояний КМО представлен на фиг.22, фиг.22а, фиг.22б, фиг.22в, фиг.22г, фиг.22д, фиг.22е, фиг.22ж.
По сигналу RESET регистр 160 (state) устанавливается в «0», а сигнал 43 (P_INT) устанавливается в «1». По умолчанию МС выполняет действия по пунктам 14…23 алгоритма работы МС.
По переднему фронту сигнала clock новое состояние присваивается регистрам 160…162 и триггеру 163.
Информация, передаваеваемая из трех других каналов через приемники 75, 76, 77 поступает (первая группа входов 87, вторая группа входов 88, третья группа входов 89) на узлы управления приемом информации, функциональная схема которых представлена на фиг.7.
Взаимодействие двух блоков передатчика 71 и приемника 78 осуществляется по 4-проводному интерфейсу, содержащему две дифференциальные линии, представленному на фиг.23, где
MOSI (Master output slave input) - дифференциальная линия для передачи данных от передатчика к приемнику;
SCLK (System clock) - дифференциальная линия для передачи тактового сигнала от передатчика к приемнику.
Временная диаграмма взаимодействия передатчика и приемника представлена на фиг.24.
Длительность одного слова должна составлять А=5,4 мкс.
Число слов в одном обмене N должно быть в диапазоне от 1 до 254.
Слова T1…TN содержат начальную паузу длительностью в 1 разряд, 25-разрядное слово, состоящее из 8-ми разрядов адреса, 16-ти разрядов данных и 1-го разряда четности (сумма разрядов адреса и данных по mod2), конечная пауза длительностью в 1 разряд. Прием и передача сообщения осуществляется старшими разрядами вперед в порядке: адрес, данные, четность.
C1…CN содержат тактовый импульс, информирующий о передаче каждого разряда слов T1…TN. Сигнал SCLK между C1…CN равен «0». Сигналы SCLK и MOSI между обменами установлены в «1».
Структура, длительность каждого разряда слов T1…TN и их взаимное расположение при передаче, а также фаза тактового импульса в словах C1…CN представлены на фиг.25.
Частота тактового импульса F сигнала SCLK зависит от передатчика, приемника, среда передачи и определяется их скоростными параметрами (F=5 МГц).
По clock 54 синхроимпульс SCLK (первый сигнал первой группы входов 87) принимается на первый сдвиговый регистр 188, который является фильтром низких частот для SCLK и на котором фиксируется передний фронт (элемент И 205) и задний фронт (элемент И 204). Одновременно с синхроимпульсом поступают данные (второй сигнал первой 87 группы входов) и принимаются на второй сдвиговый регистр 189, который является фильтром низких частот для данных (выделение данных из помех). Когда на первом сдвиговом регистре 188 и элементе И 205 определяется передний фронт, то счетчик 191 увеличивается на единицу и данные с триггера 200 заносятся в третий сдвиговый регистр 190. Когда на первом сдвиговом регистре 188 и элементе И 204 определяется задний фронт, то значение «мажора», который выполнен на элементах И 206, 207, 208 и элементе ИЛИ 212, заносится на триггер 199. Если состояние счетчика 191 равно «25», то на элементах И 209, триггере 196, триггере 195 и триггере 201 формируется сигнал разрешения на прием «Receive_en», по которому МС 164 обеспечивает запись принятых данных по адресу с 24 разряда по 17 разряд принимаемых данных. Одновременно с приемом данных на сумматоре по mod2 определяется контрольная сумма, которая в случае равенства «1» блокирует запись данных в ОЗУ. Первый 157 узел управления приемом совместно с МС 164 выполняет запись данных в третье 168 ОЗУ, а в четвертое 169 ОЗУ записывается «1», второй 158 узел управления приемом совместно с МС 164 выполняет запись данных в пятое 170 ОЗУ, а в шестое 171 ОЗУ записывается «1», третий 159 узел управления приемом совместно с МС 164 выполняет запись данных в седьмое 172 ОЗУ, а в восьмое 173 ОЗУ записывает «1». Если состояние первого 199 сдвигового регистра равно «11111», что свидетельствует о паузе между словами, то устанавливается в «1» триггер 197 и выполняется сброс счетчика 191. На триггерах 199 и 200 выполняется синхронизация по SCLK. На триггерах 195 и 196 выполняется задержка, чтобы сигнал receive_en (разрешающий приемом) не совпал со сменой данных.
Передача данных выполняется следующим образом.
В нулевом состоянии регистра 160 (state) MC 164 формирует запрос чтения режимов и признаков для первого ОЗУ, устанавливая на адресную шину Radr нулевой адрес и на управляющую группу «выходов» чтения нулевые состояния, по clock 54 состояние «state» увеличивается на 1 и заносится в регистр 160, в первом состоянии выполняется пауза на один такт clock 54, во втором состоянии выполняется чтение режимов и признаков, то есть считываемая информация из первого ОЗУ записывается в регистр 161 (mode) и если считываемая информация равна нулю или единице, то в регистр 161 (mode) записывается двойка, начальный адрес данных и MC 164 переходит в новое состояние, если считываемая информация не равна нулю или единице, то MC 164 переходит в следующее состояние.
В третьем состоянии выполняется запись прочитанных режимов и признаков в первое ОЗУ в первую ячейку, устанавливая на адресную шину wadr первый адрес и на управляющую группу выходов записи нулевые состояния, на шину данных wdata поступает содержимое регистра 161 (mode) с 15-го по 8-й разряды.
Если 12 разряд или 13 разряд (признаки обмена однократный, циклический) регистра 161 (mode) равны «1», то MC 164 переходит в следующее состояние, если нет, то в регистр 160 (state) заносятся нули.
В четвертом состоянии формируется запрос на чтение данных и маски первого и второго ОЗУ, устанавливая на управляющие группы выходов чтения rdb_1, rdblkb_1, rdb_2, rdblkb_2 нулевые состояния, а на адресные шины radr_1, radr_2 содержимое регистра 161 (mode) с седьмого по нулевой разряды, содержимое регистра 160 (state) увеличивается на единицу, в пятом состоянии выполняется пауза на один такт clock 54.
В шестом состоянии выполняется чтение данных ОЗУ1 и маски ОЗУ2, вычисление контрольной суммы передачи на сумматоре по mod2 186, считанные данные rdata_1 записываются в регистр 162 (tdat) с шестнадцатого по первый разряды, а в старшие разряды (с 24-го по 17-й) регистра записывается содержимое регистра 161 с седьмого по нулевой разряды, а в ОЗУ2 выполняется сброс маски по адресу wadr_2 (содержимое регистра 161 с седьмого по нулевой разряды). Если содержимое нулевого разряда считываемой информации равно нулю, так как передача замаскирована, то информацию не передаем и переходим к девятому состоянию, если единице, то переходим к следующему состоянию.
В седьмом состоянии формируется сигнал на триггере 163 tdata_en, no которому в узле управления передачей 165 считываемые данные через первую 179 группу элементов И записываются в сдвиговый регистр 175. Одновременно константа 181, равная единице, через вторую 180 группу элементов И заносится в счетчик 176. С первого разряда счетчика формируется сигнал sclk, синхронизирующий данные (второй сигнал группы выходов 97). По девяносто девятому импульсу дешифратор 177 формирует сигнал, устанавливающий триггер 178 в единицу и вырабатывает сигнал конец передачи (end_transmit). В восьмом состоянии анализируется сигнал конец передачи, если он есть, переходим к следующему состоянию, если его нет, то передача данных продолжается.
В девятом состоянии, если с седьмого по нулевой разряды регистра 161 находятся в единицах, то формируется сигнал прерывания p_int 43 (14-й разряд регистра 161 устанавливается в «1»), устанавливается циклический режим (13-й разряд регистра 161 заносится в 12-й разряд). В регистре 161 с седьмого по нулевой разряды заносится начальный адрес передаваемого массива (00000011).
Если содержимое регистра 161 с седьмого по нулевой разряды не равно всем единицам, то оно увеличивается на единицу, выполняется запрос на чтение режимов и признаков, формируется нулевой адрес первого ОЗУ, а затем выполняется переход в следующее состояние.
В десятом состоянии выполняется пауза.
В одиннадцатом состоянии выполняется запись признака циклического режима в регистр 161 (тринадцатый разряд), запись блокировки прерывания в регистр 161 (пятнадцатый разряд).
Если пятнадцатый разряд считываемых данных равен «1», то выполняется сброс признака прерывания («0» записывается в четырнадцатый разряд регистра 161), далее выполняется переход в следующее состояние.
В двенадцатом состоянии выполняется запись содержимого регистра 161 режимов и признаков в «0» ячейку первого ОЗУ, затем выполняется переход в «0» состояние.
1. Каждый канал адаптивного управления (КАУ) 1, 64, 65, 66 от задатчика 5 по мультиплексному каналу обмена 32 через МКО-контроллер 18 получает команду на управление своей обмоткой ЛЭД (8, 55, 56, 57) соответственно от своих датчиков ДОС (4, 58, 59, 60), ДПТ РМ (13, 61, 62, 63) он получает перемещение штока привода и скорость перемещения.
2. Затем каждый КАУ (1, 64, 65, 66) решает задачу управления обмоткой ЛЭД (8, 55, 56, 57) и пакет данных (команда, состояние датчиков ДОС и ДПТ, решение) отправляет через контроллер межмашинного обмена (КМО) (67, 68, 69,70) и передатчик (71, 72, 73, 74) трем другим каналам, которые принимают пакет данных с помощью приемников (75, 76, 77; 78, 79, 80; 81, 82, 83; 84, 85, 86), аналогично поступают и другие каналы.
3. Далее канал КАУ, получивший пакет данных от других каналов, который передавался на шаге 2, сравнивает свои переданные данные с полученными. Процедура сравнения заключается в следующем:
- четыре сравниваемых параметра (отдельно для команды, ДОС, ДПТ и решения) по отдельности проверяются на соответствие их нахождения в пределах заранее заданного диапазона;
- те значения, которые не попали в эти диапазоны отбрасываются;
- из оставшихся значений вычисляется среднее значение, таким образом получаем средние значения команды, состояний ДОС и ДПТ и решений.
4. Канал выполняет сравнение собственного параметра со средним значением соответствующего параметра. Если какой-либо собственный параметр отличается от среднего параметра на предельную велчину дельту (Δ), то собственный параметр замещается средним значением и на следующей команде используется для получения решения.
5. Если на шаге 3 за пределы диапозона вышли все параметры какой-либо группы, то это означает, что задача управления не может быть решена, поэтому канал, обнаруживший такую ситуацию должен быть отключен.
6. Описанный алгоритм допускает отказ трех любых каналов, при этом скорость перемещения штока гидропривода снижается в 4 раза, либо отказ двух любых каналов КАУ (1, 64, 65, 66) и двух КМО (67, 68, 69, 70) у оставшихся каналов, в этом случае скорость перемещения штока ГД снизится в 2 раза. В случае отказа одного любого канала и трех КМО (67, 68, 69, 70) у оставшихся каналов динамика снижается на ¼, в случае отказа четырех КМО всех каналов скорость перемещения штока ГД может быть снижена не более чем на ¼, если происходит не точная работа задатчика исправного канала.
Источники информации, принятые во внимание при экспертизе
1. INTERNATIONAL SYMPOSIUM OF «HYDRAULIC SYSTEMS AND ACTUATORS OF AIRCRAFTS» September 93, SAMARA, RUSSIA. DIRECT DRIVE VALVE TECHNOLOGY. PHILOSOPHY and CAPABILITY. By RANBIR BHATTI, MARKETING MANAGER of S.A.B.C.A. and ANDRE HUBERT, CHIEF ENGINEER of S.A.B.C.A. стр.17/28, 27/28, 29, 30.
2. Aircraft Flight Control Actuation System Design - E.T.Raymond, C.C.Chenoweth, Society of Automotive Engineers, 1993 г., с.104-116, рис.4-53, рис.4-55, рис.4-57.
3. Патент RU №2233464, кл. 7G05B 11/01, В64С 13/40, 2004 г. (прототип).
4. Микросхема интегральная (МКО-контроллер) APA450PQ2081 (ACTEL), карта заказа ЮШКР.430103.326Д16, ФГУП «НИИ «Субмикрон».
5. Элемент «Пельтье» 1М С06-126-15 # СМК.021-06ТУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного управления электрогидравлическим следящим приводом с контролем | 2015 |
|
RU2610851C1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2424944C1 |
| БОРТОВОЙ СПЕЦВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2522852C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Программируемый контроллер | 1989 |
|
SU1647594A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для обмена двухмашинного вычислительного комплекса | 1981 |
|
SU991403A1 |
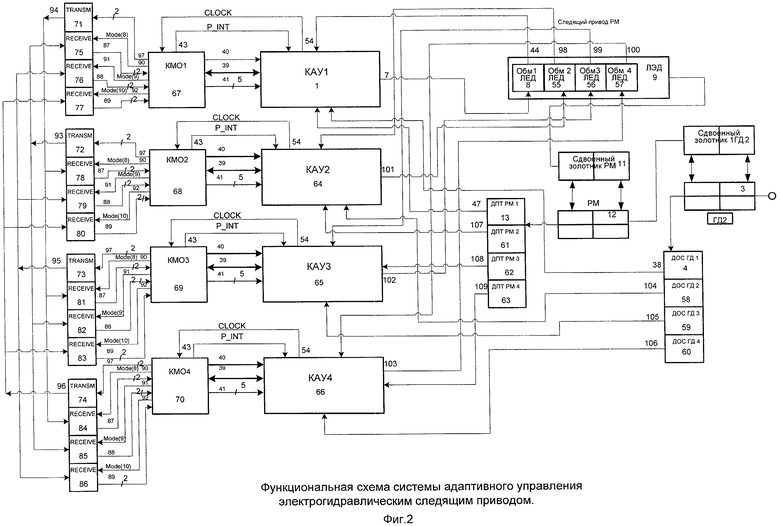
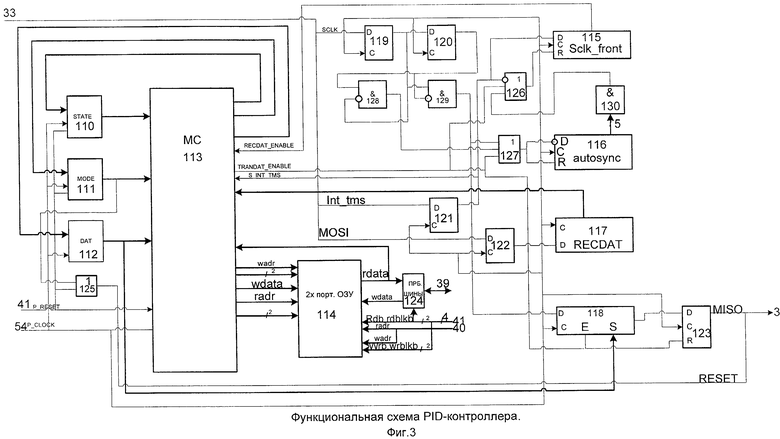

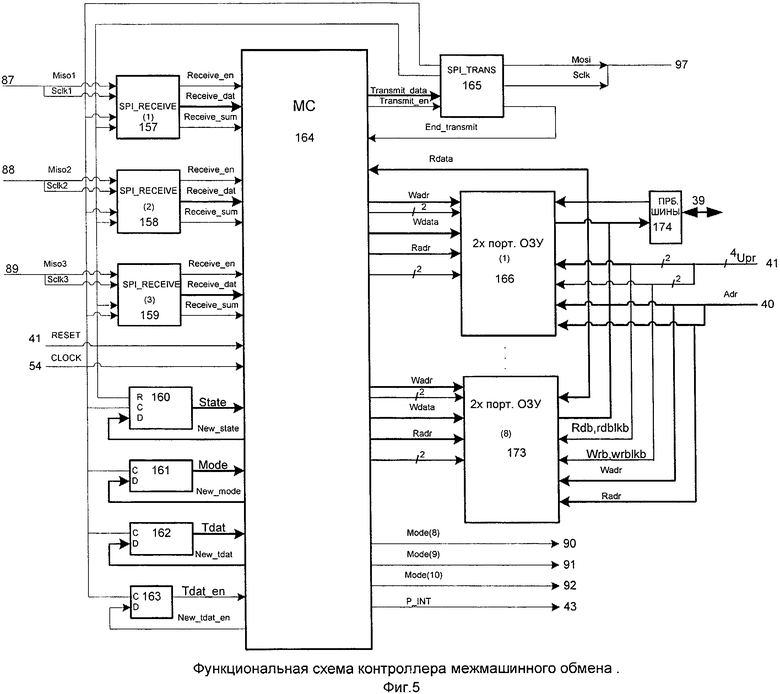
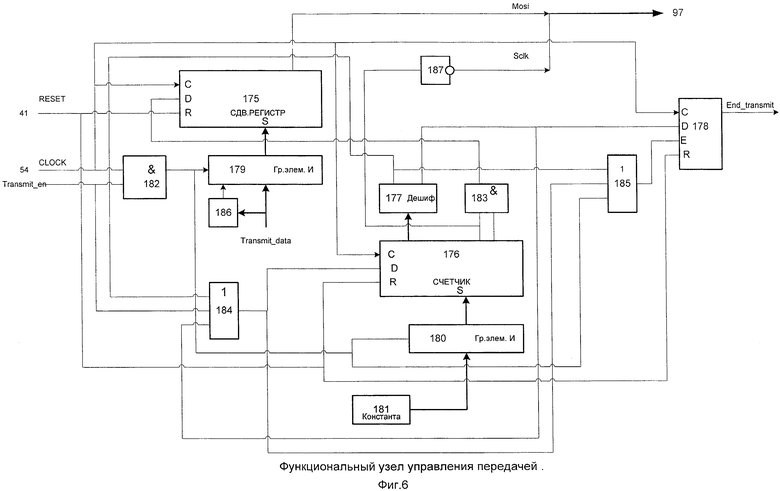
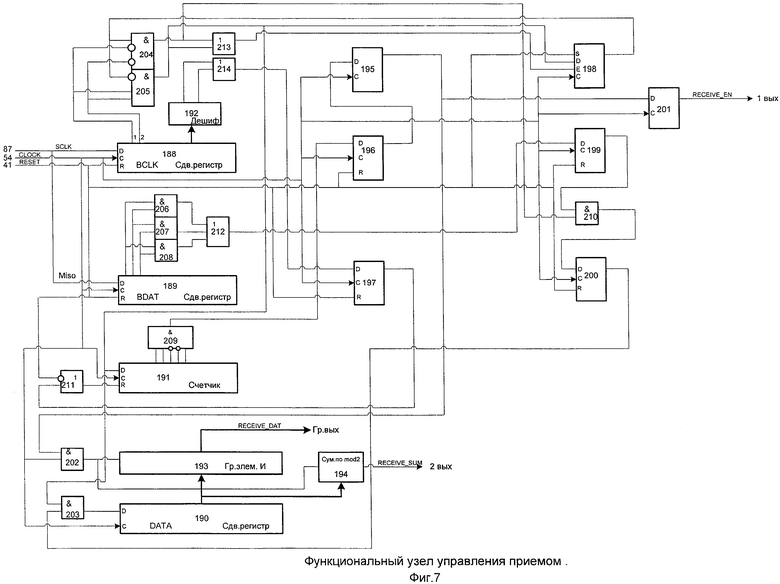
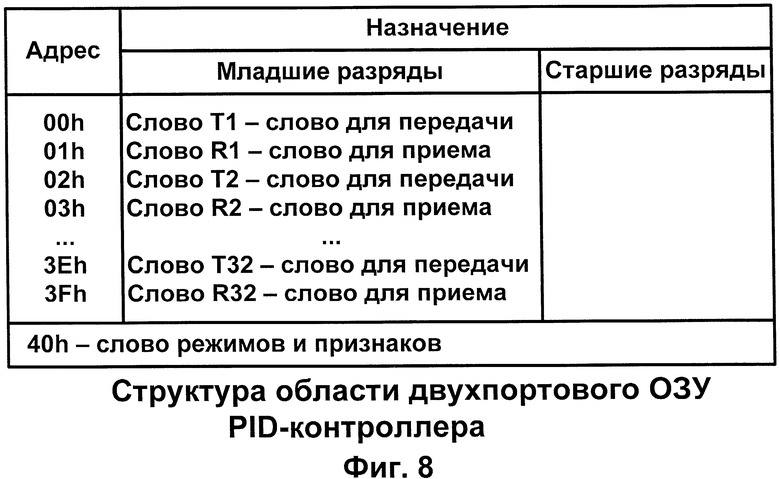
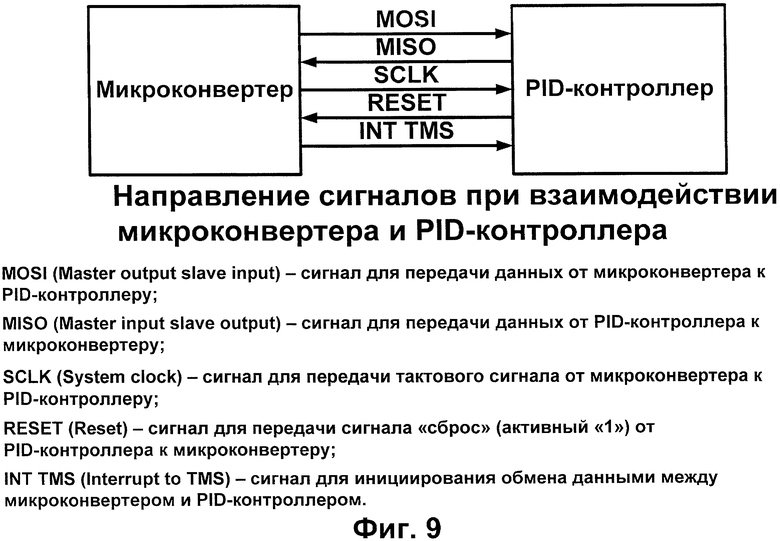
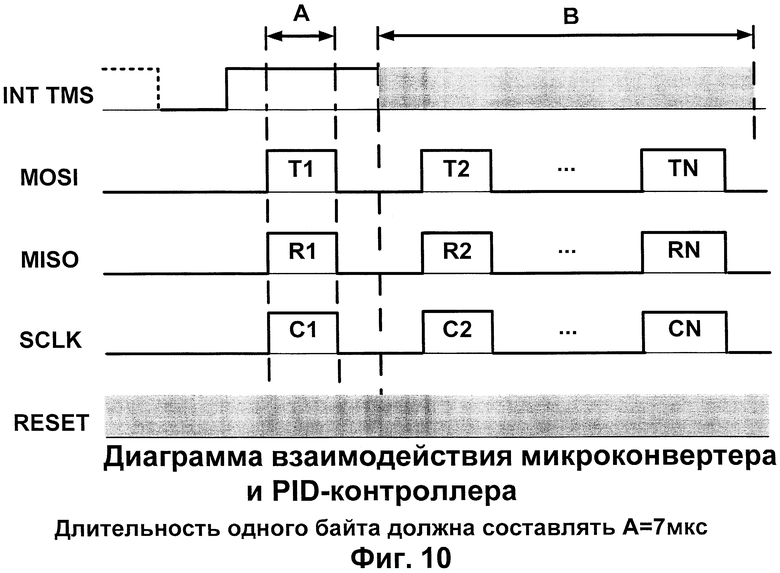
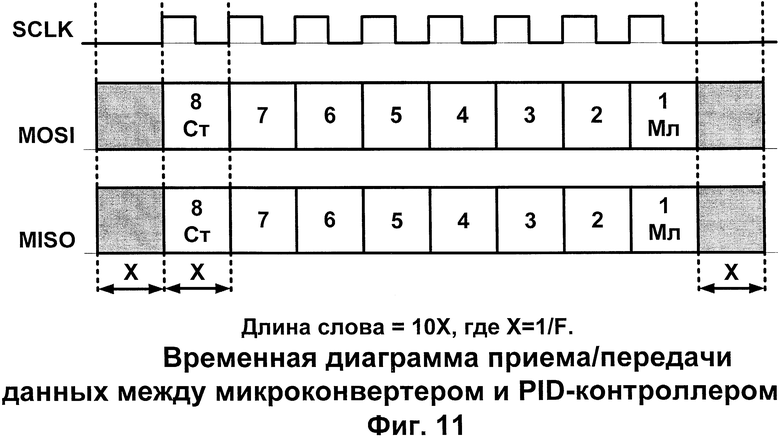
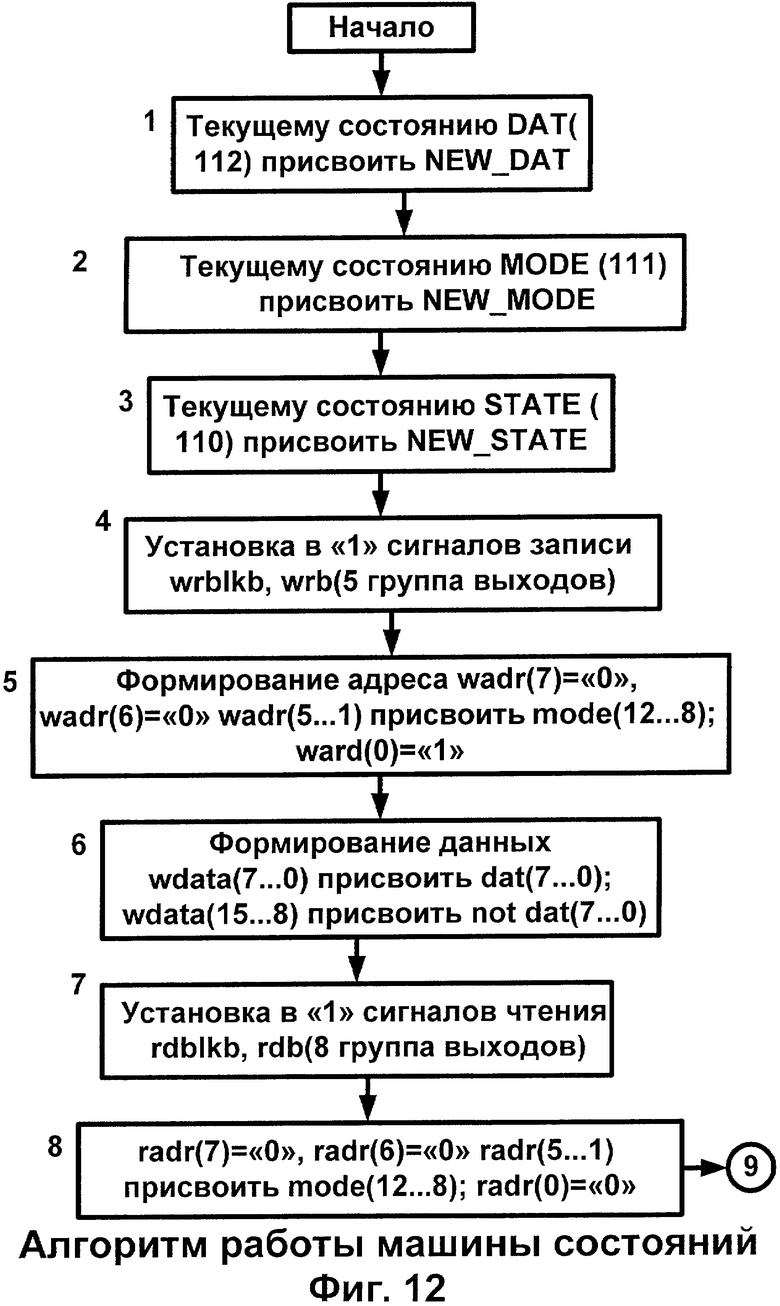
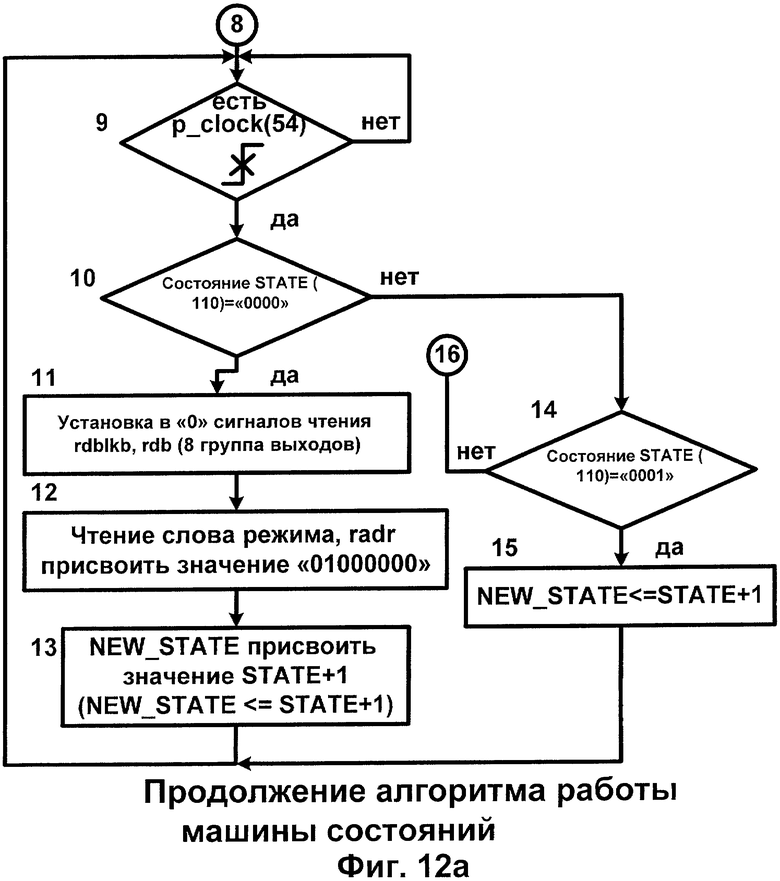
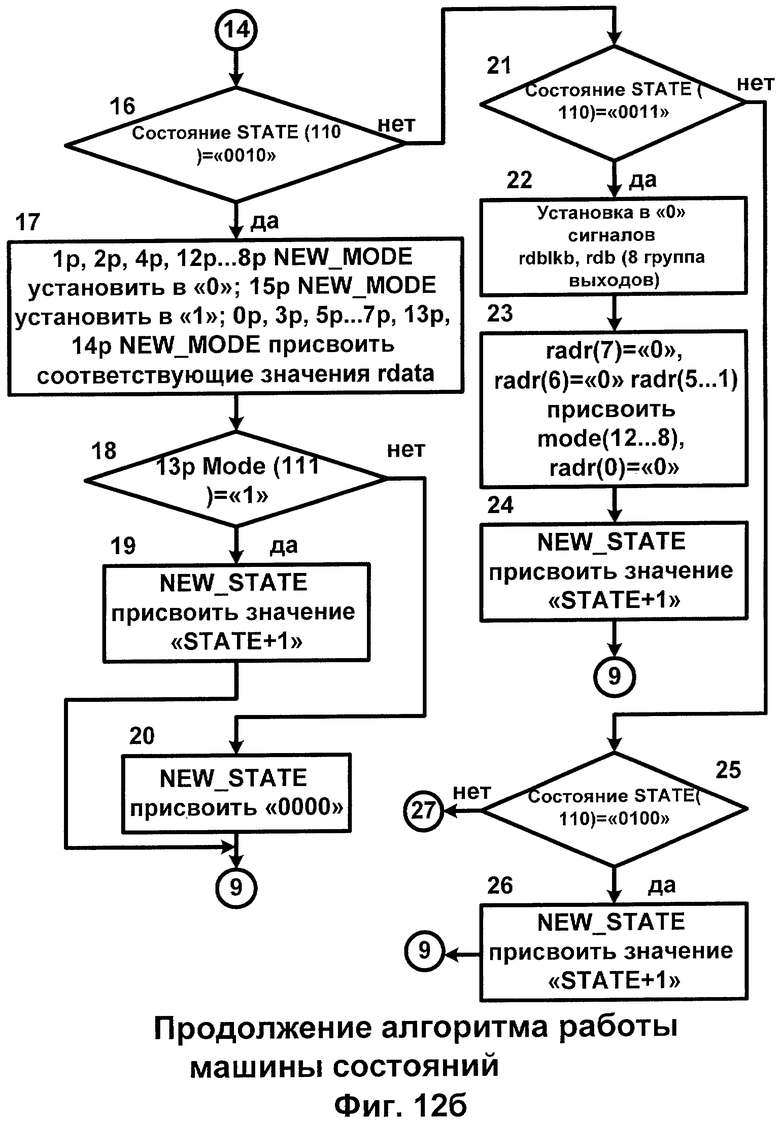
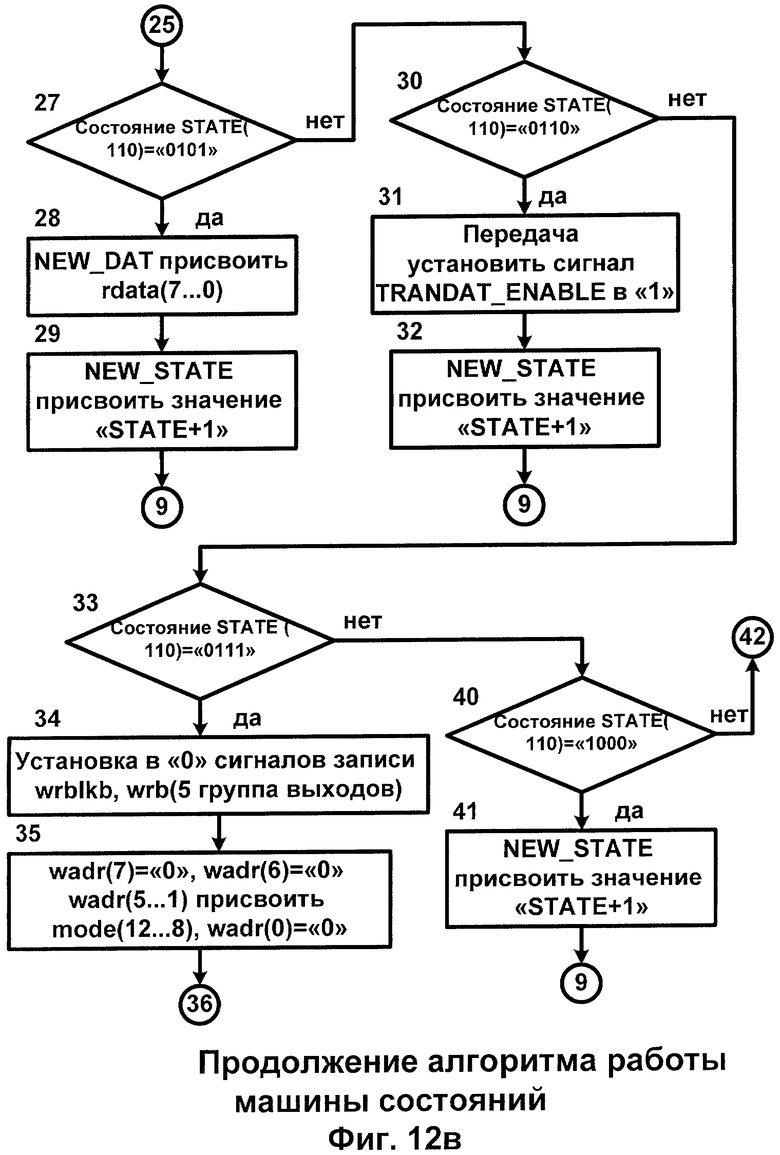
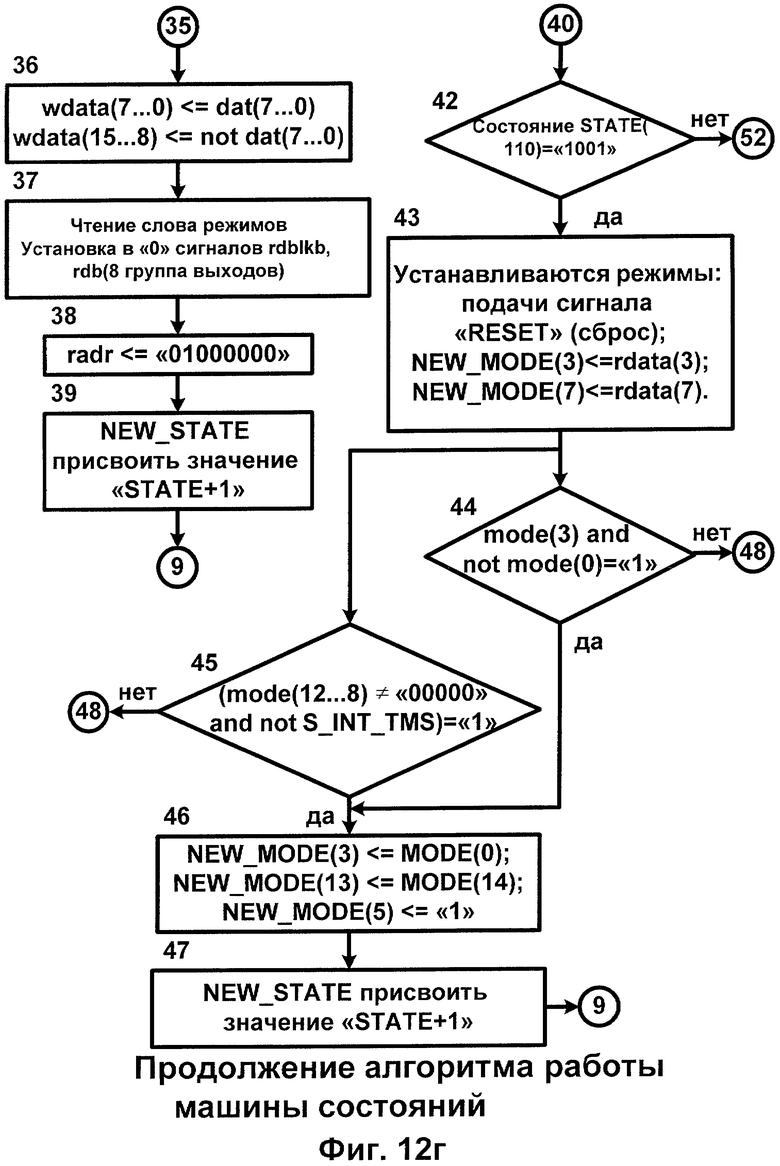
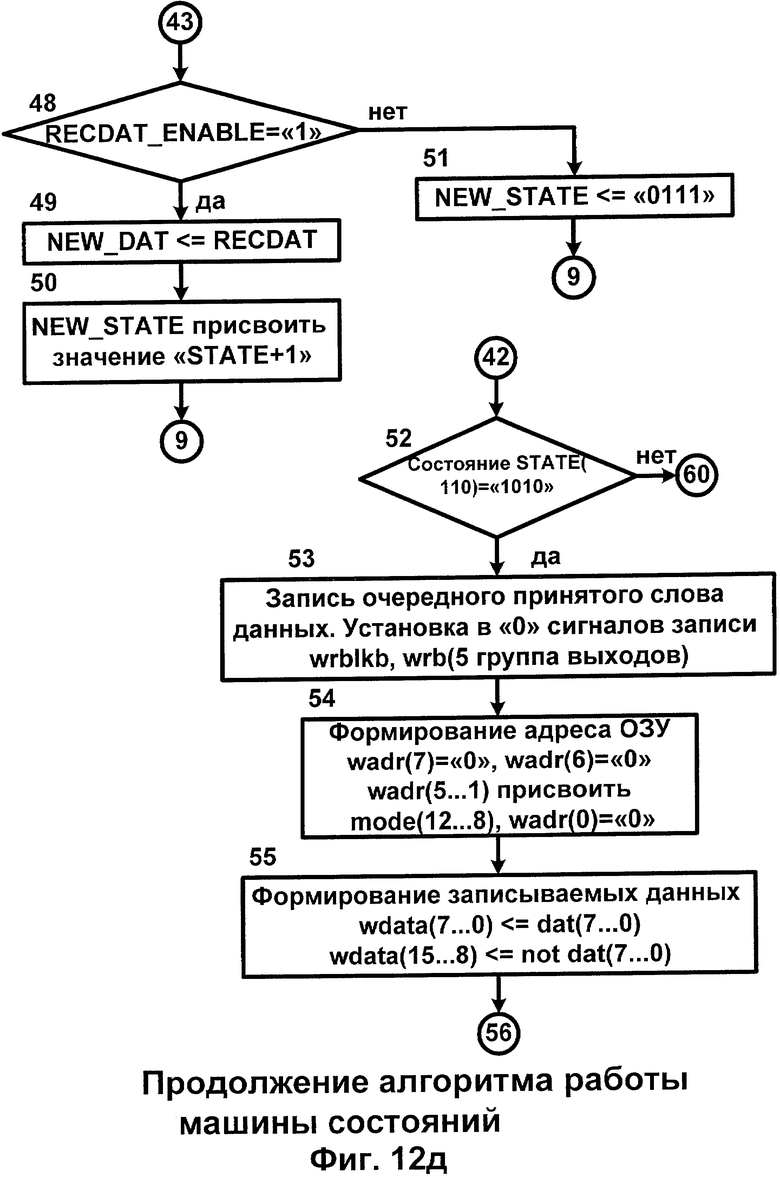
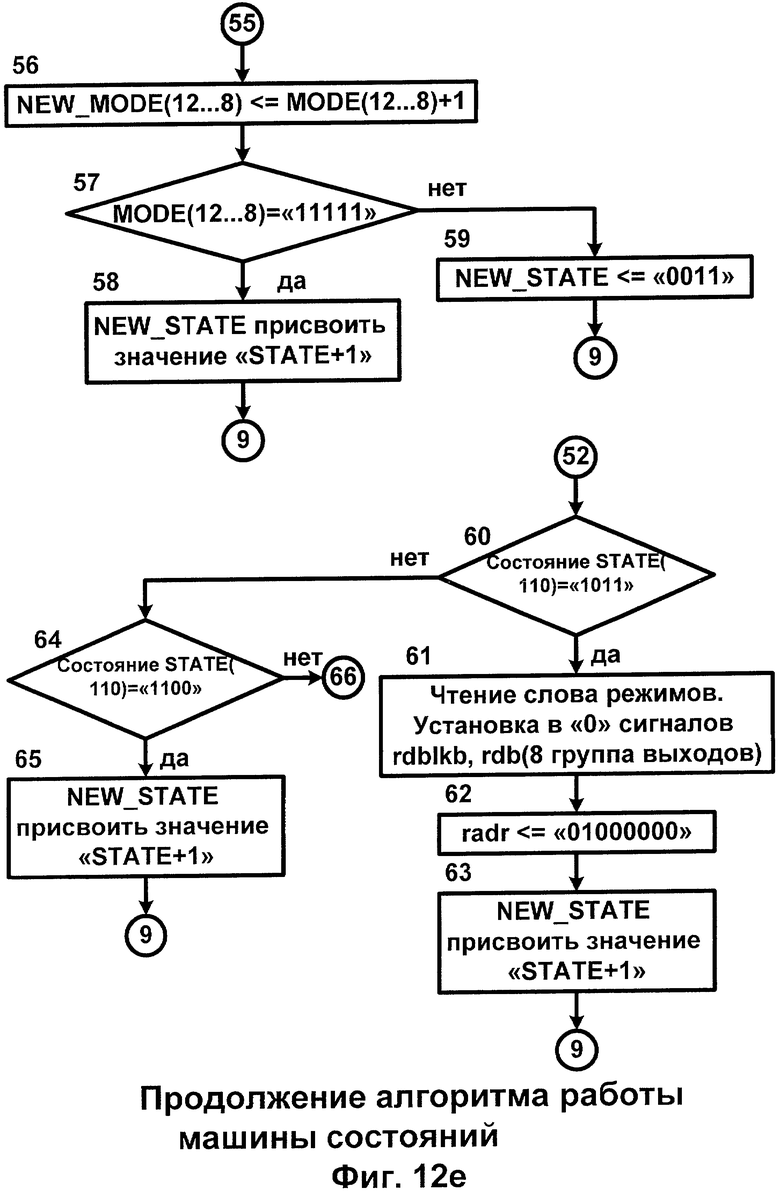
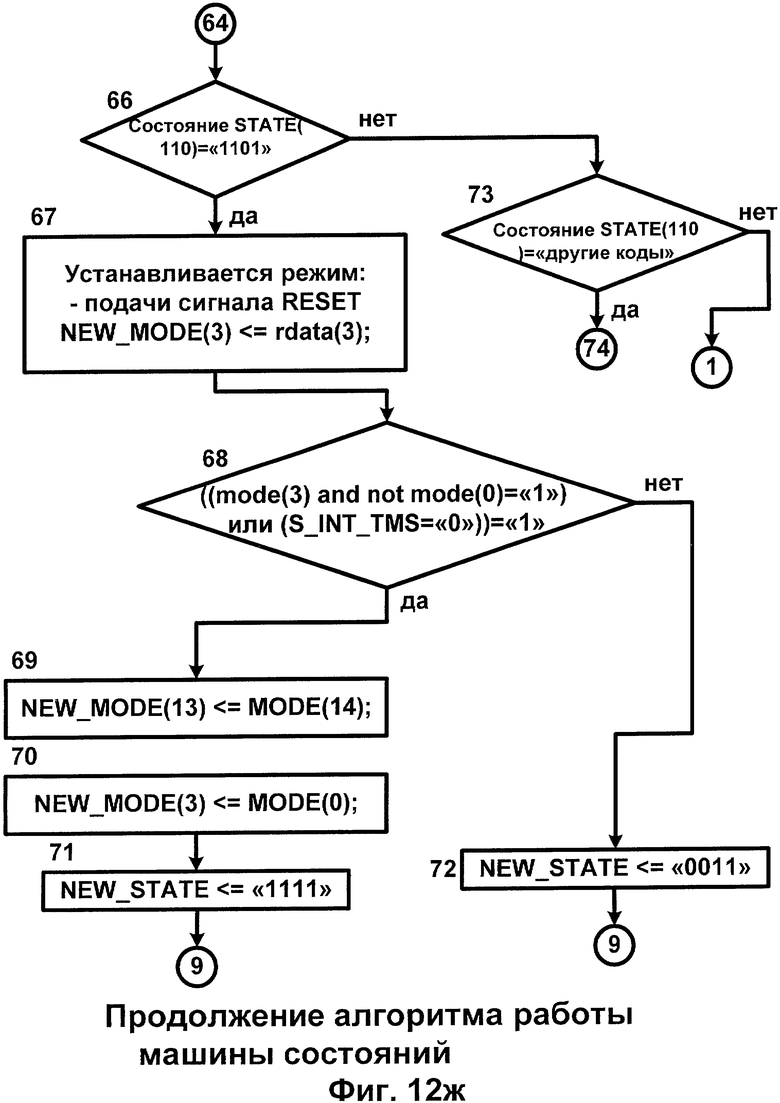
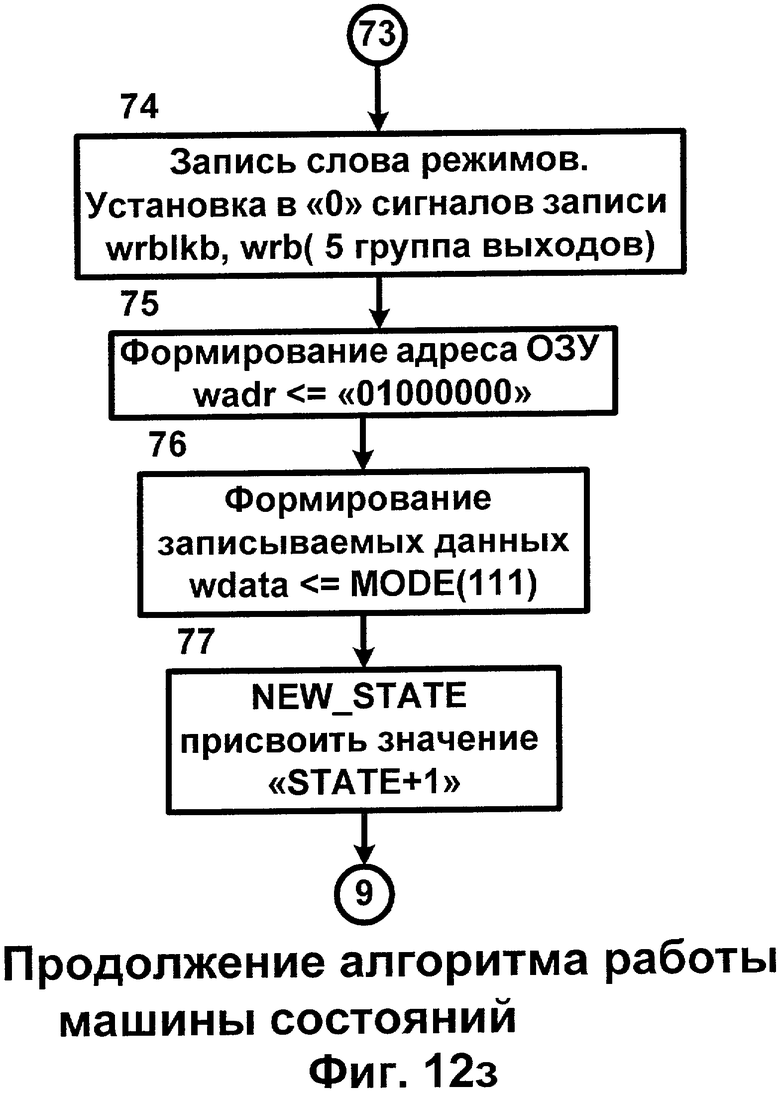
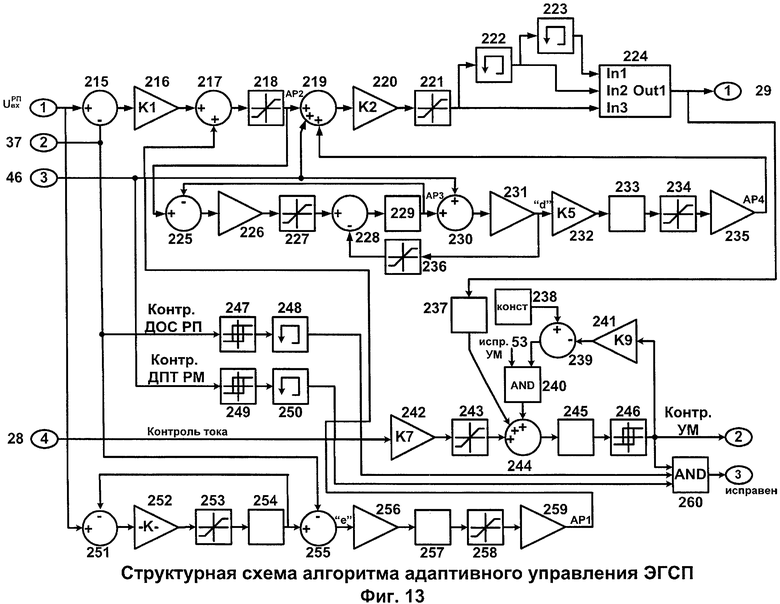
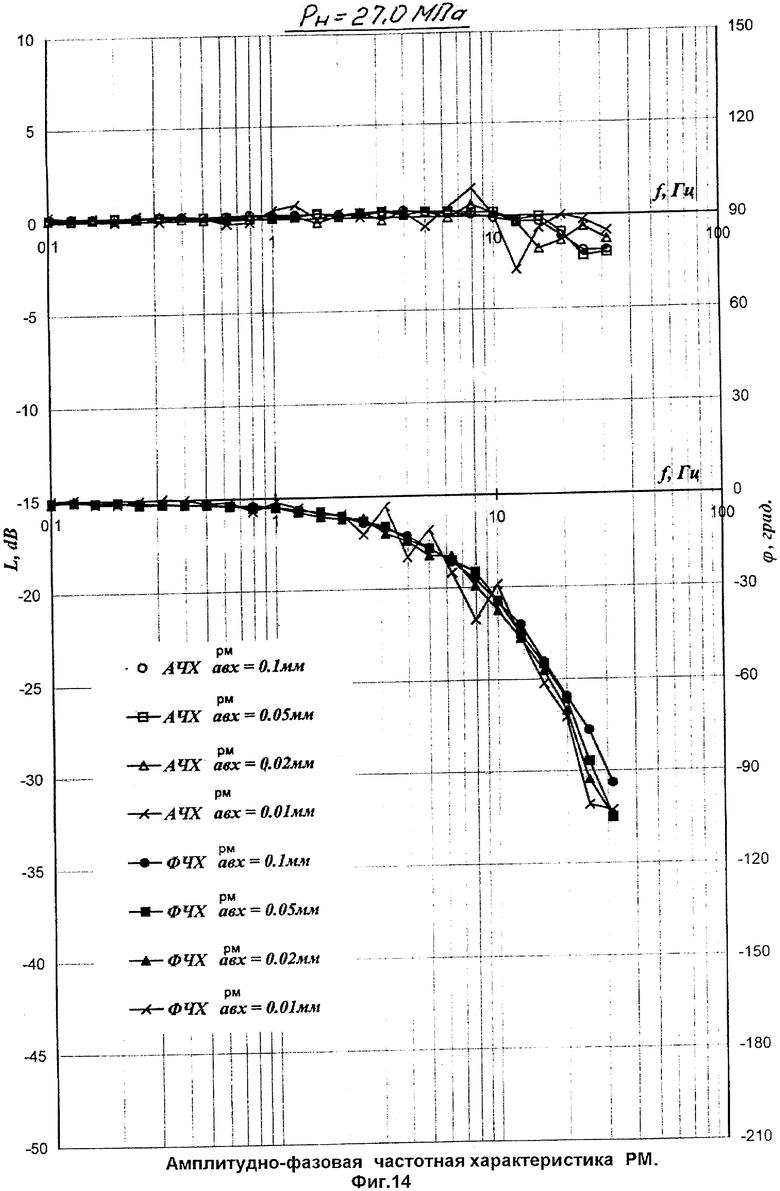
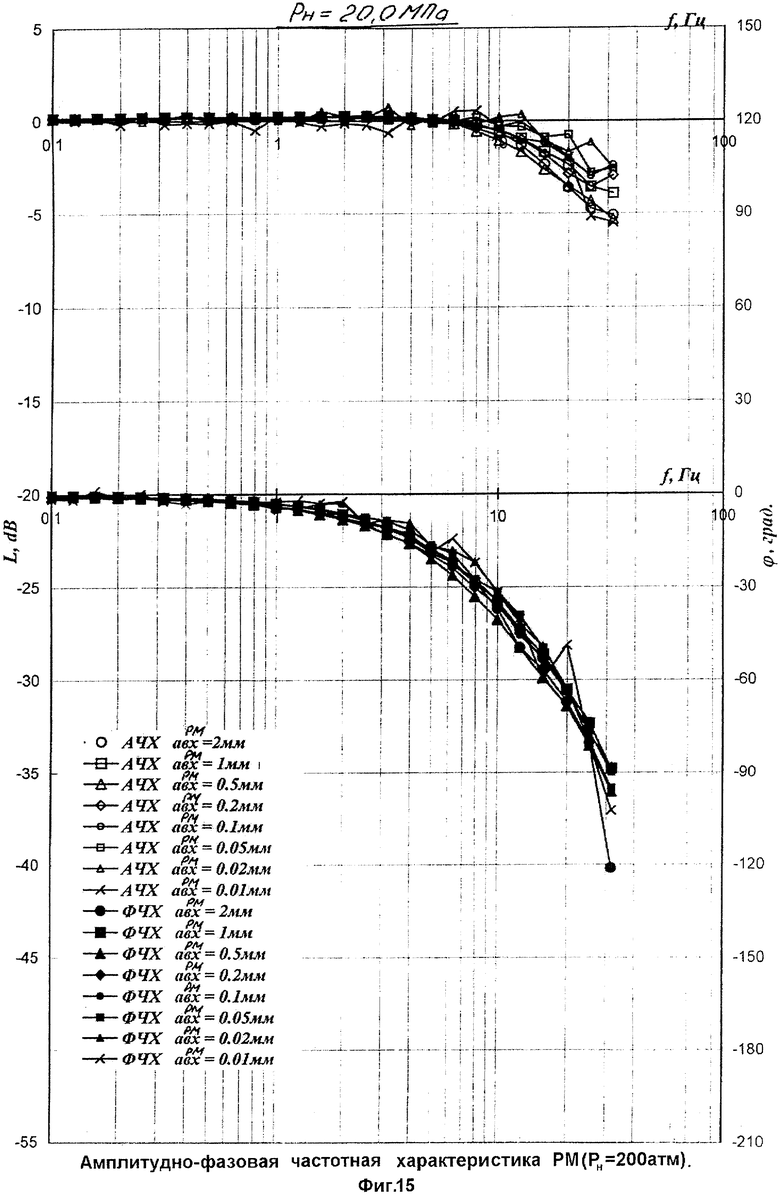
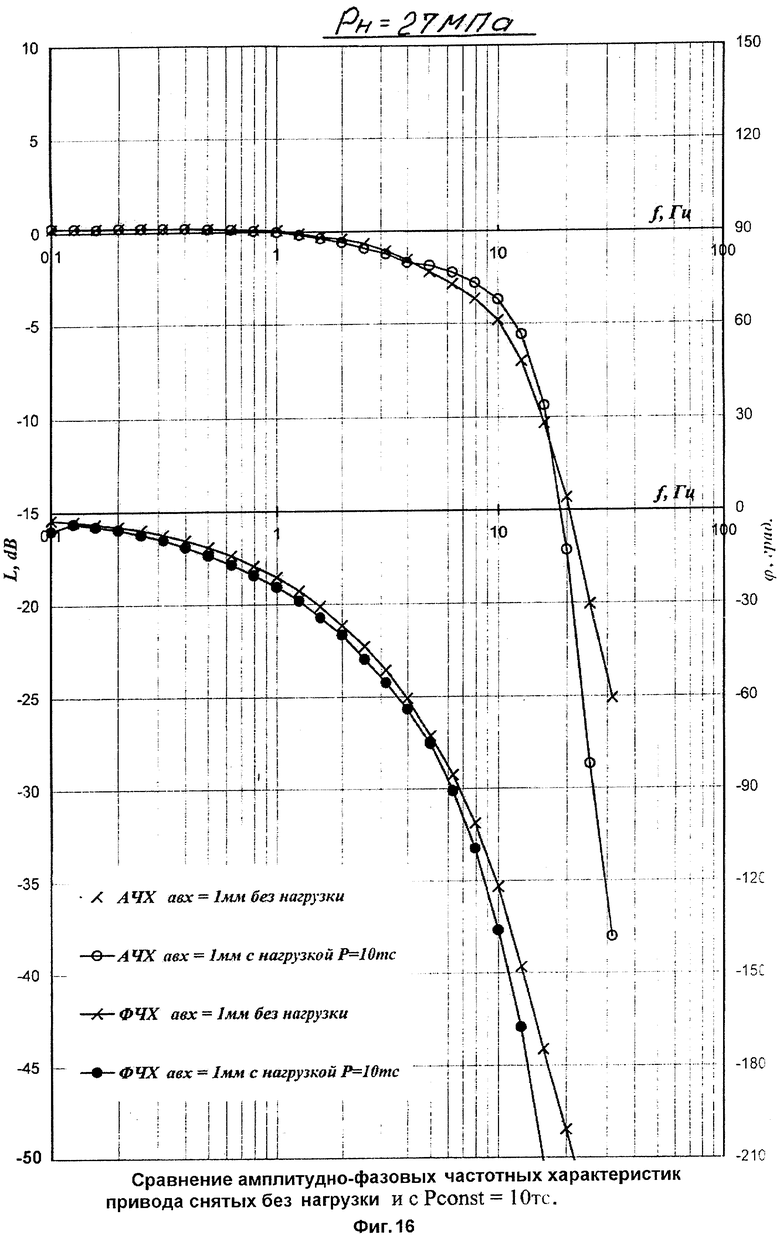
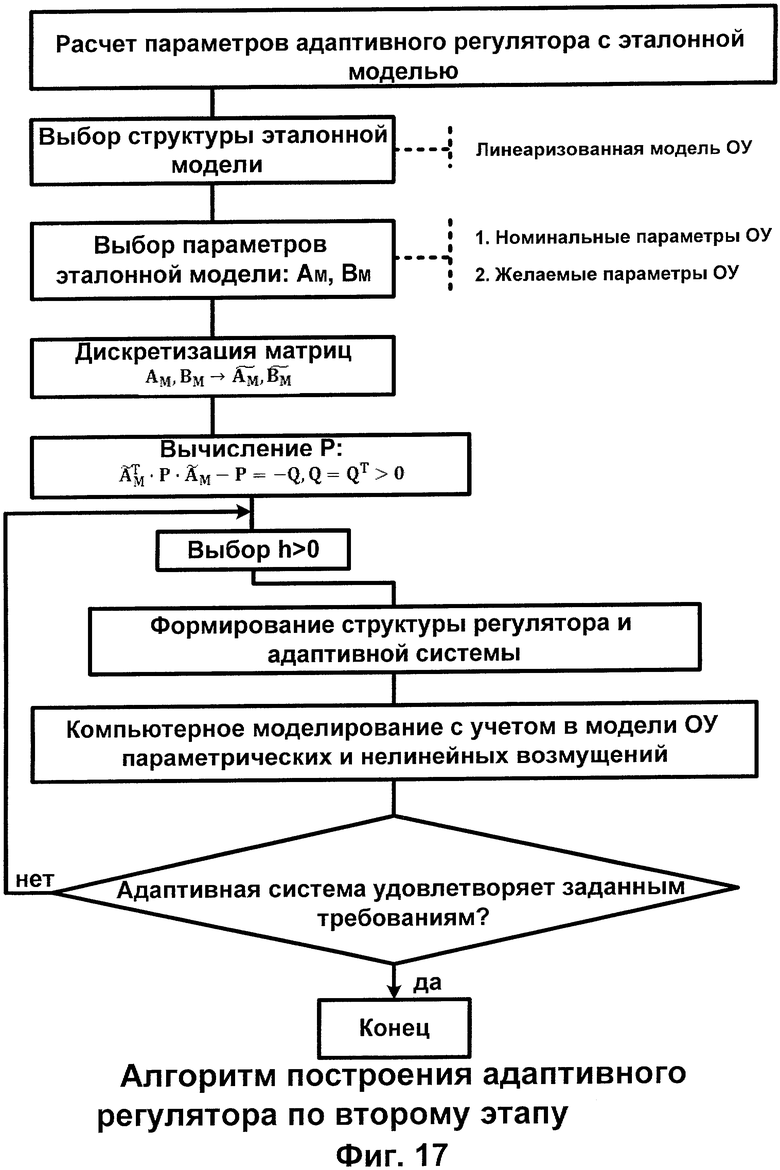
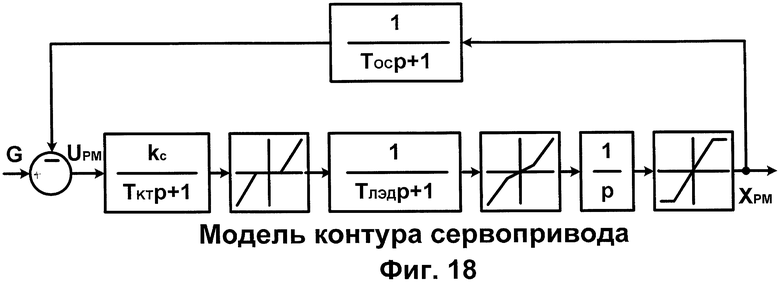
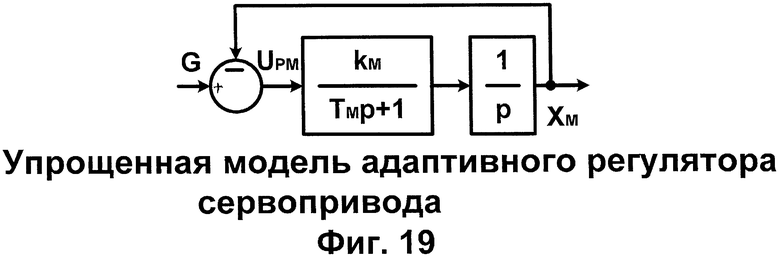
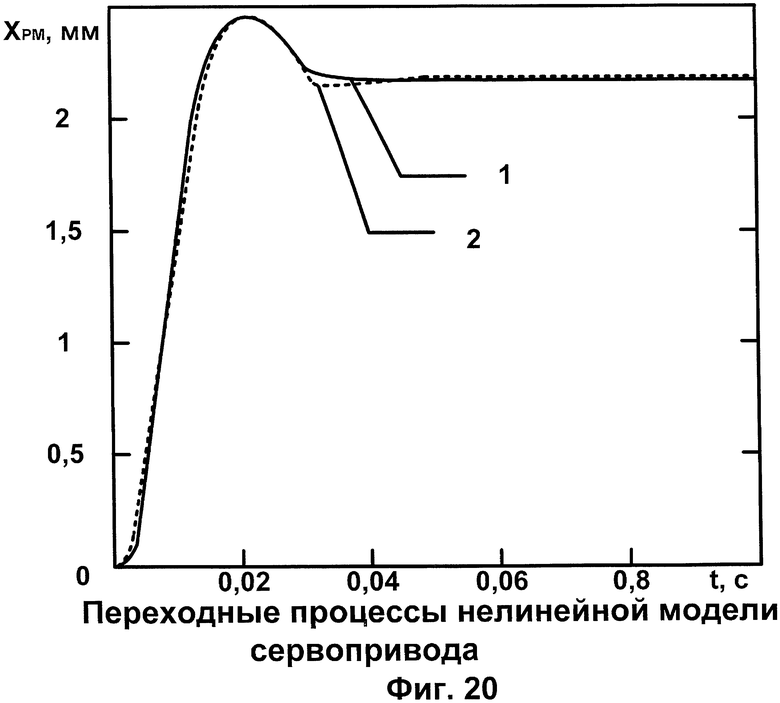
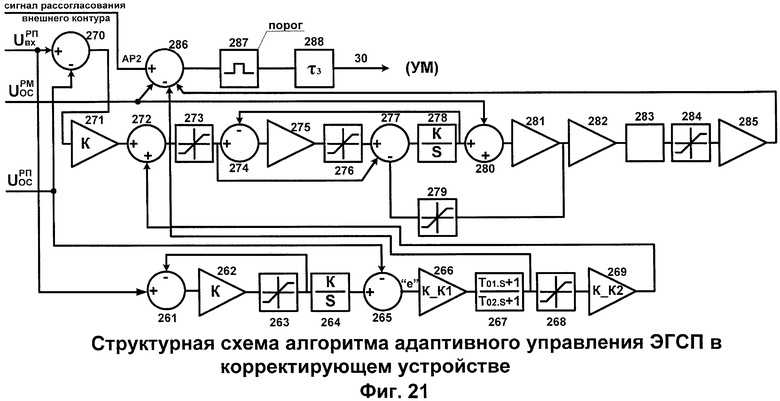
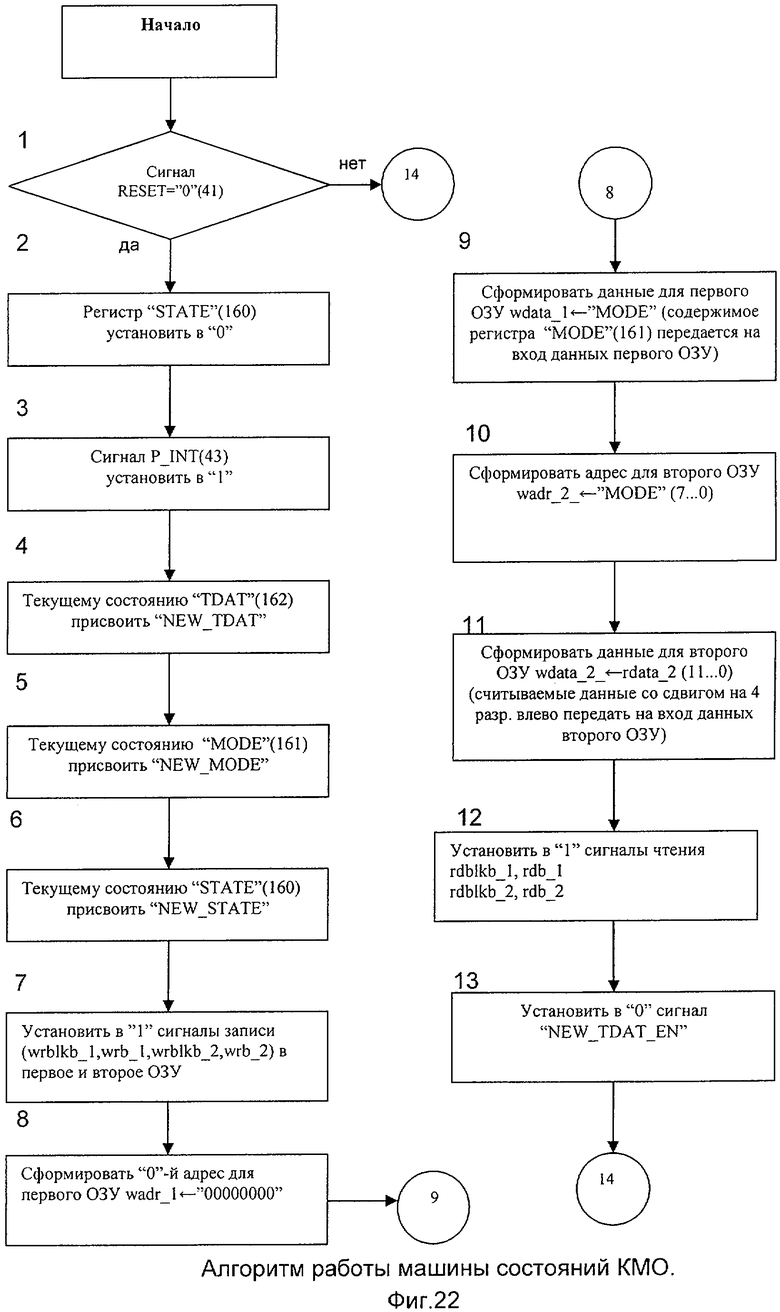
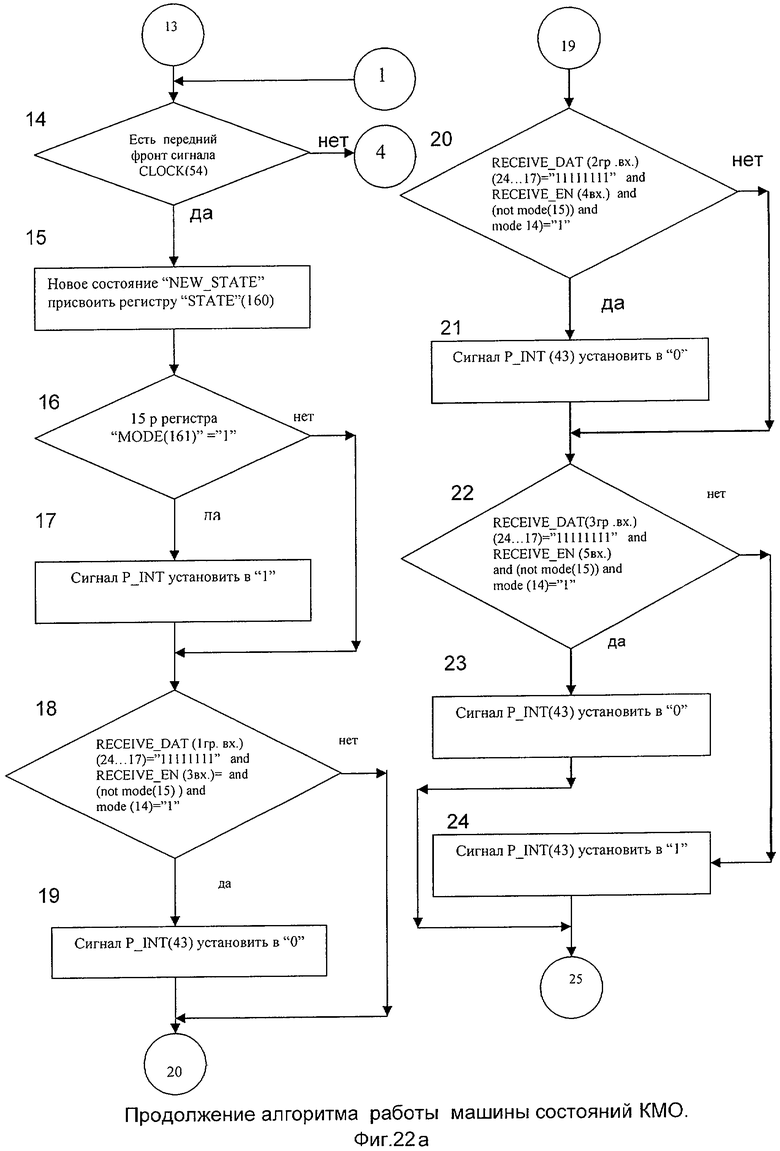
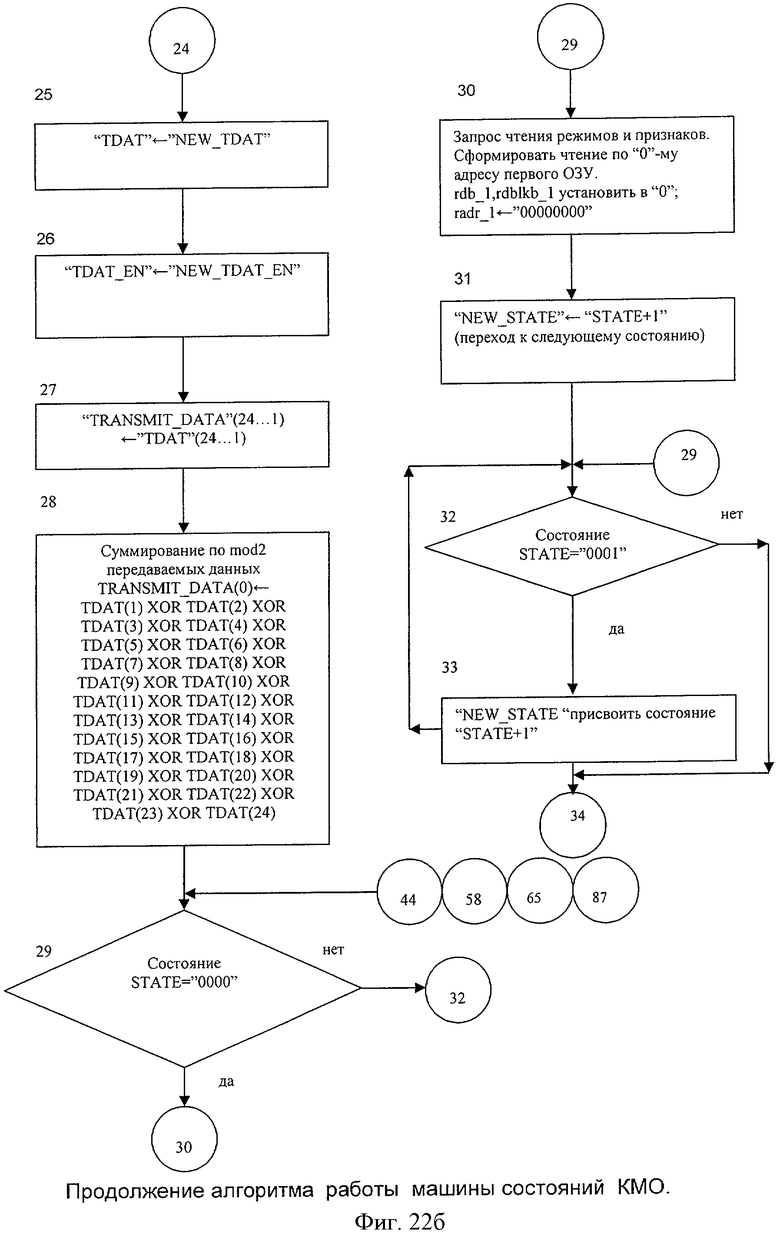
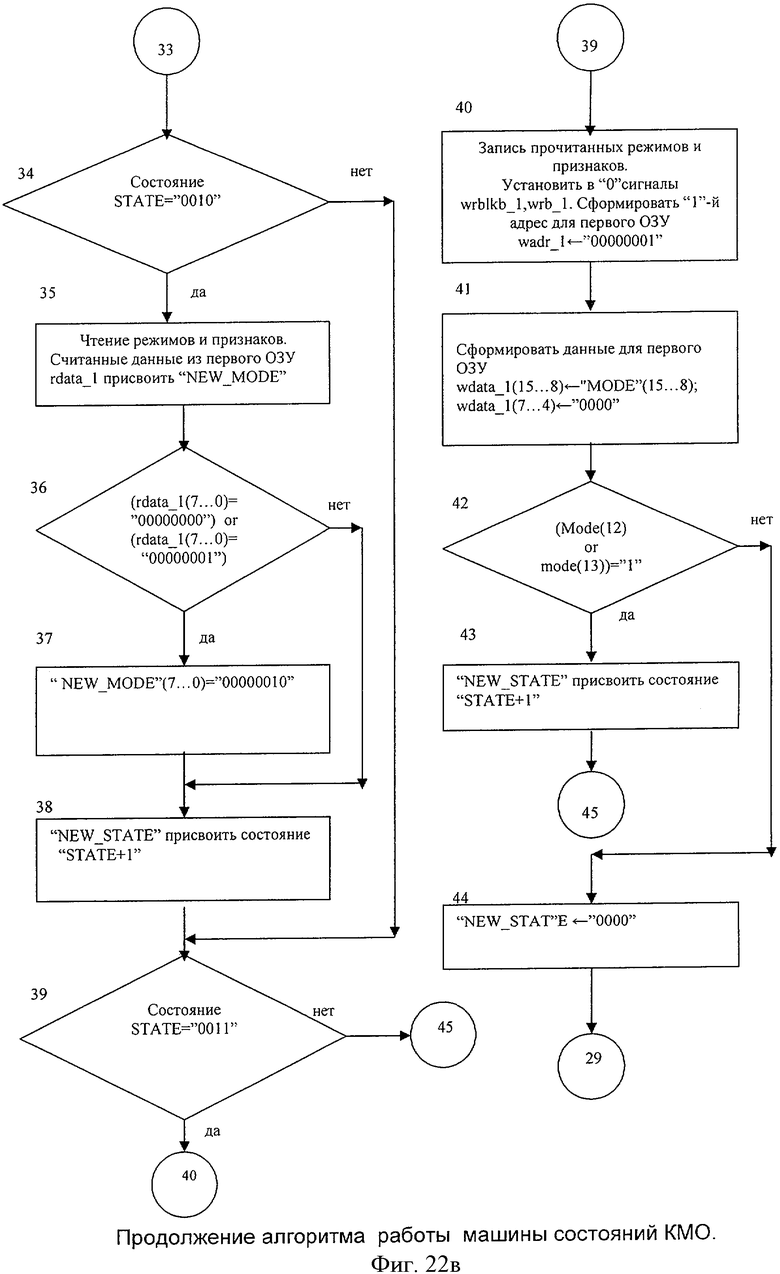
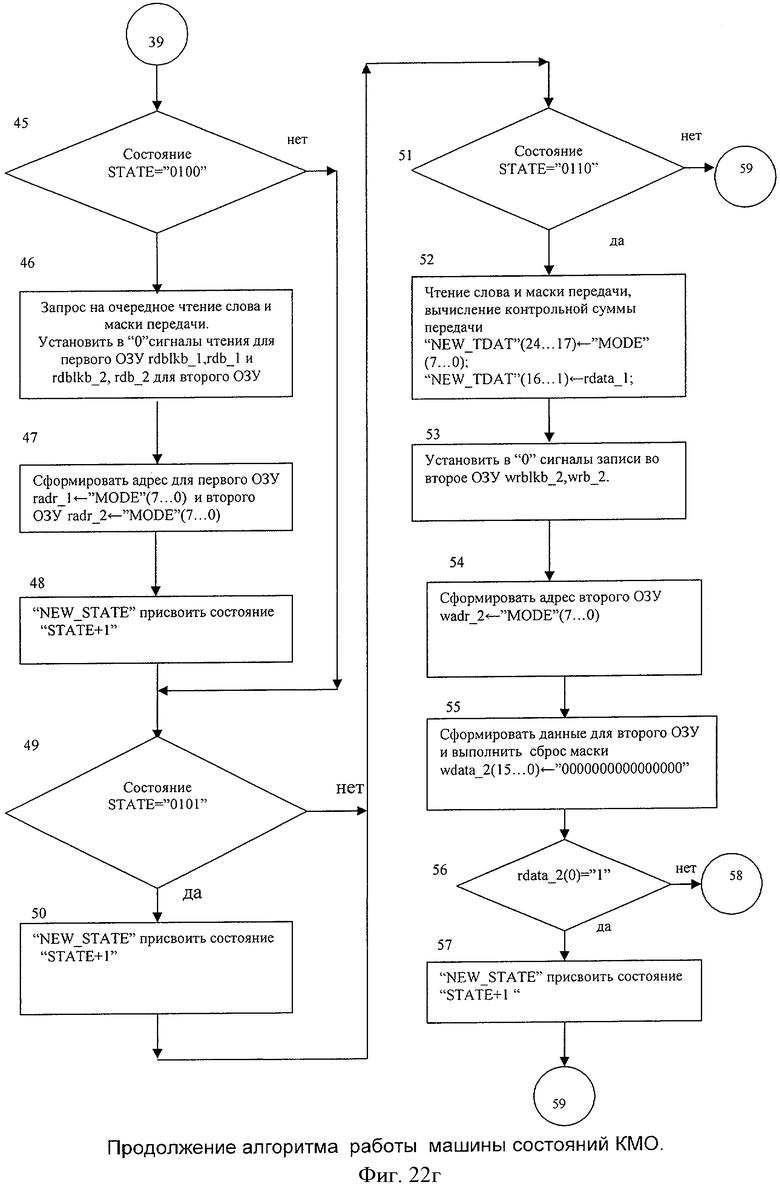
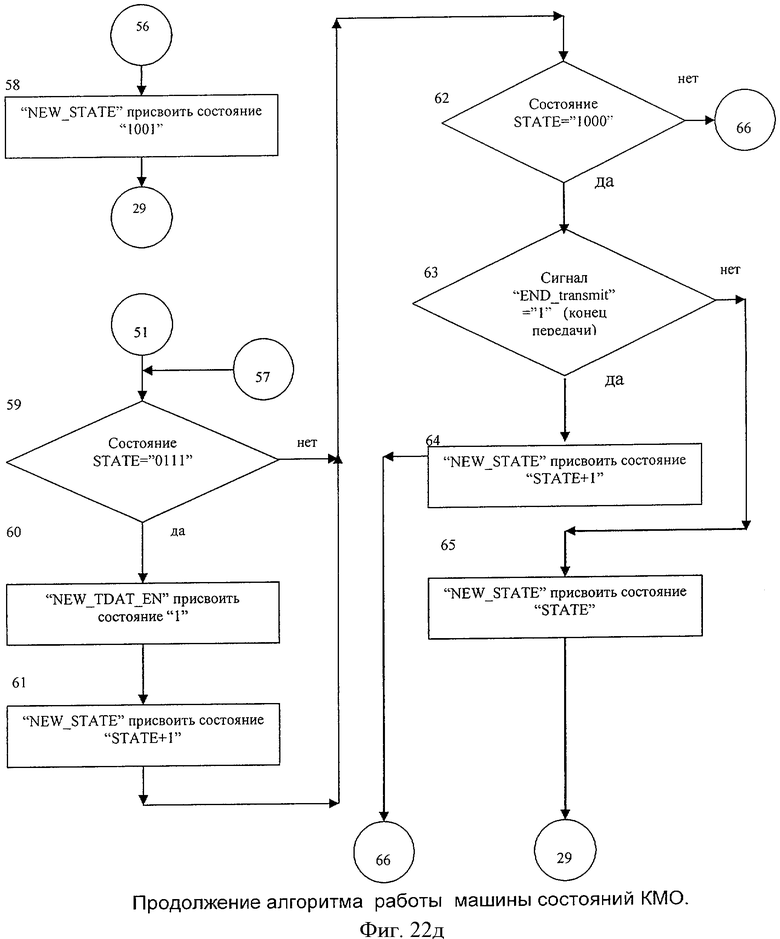
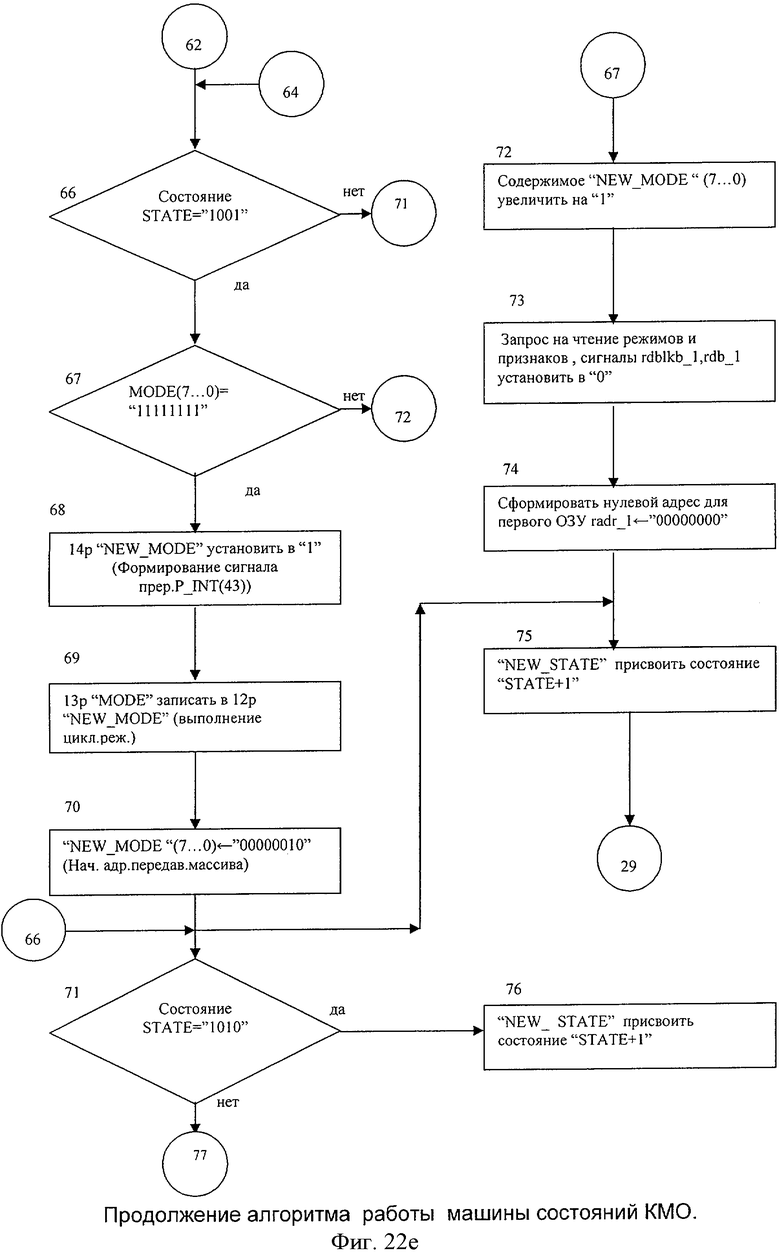
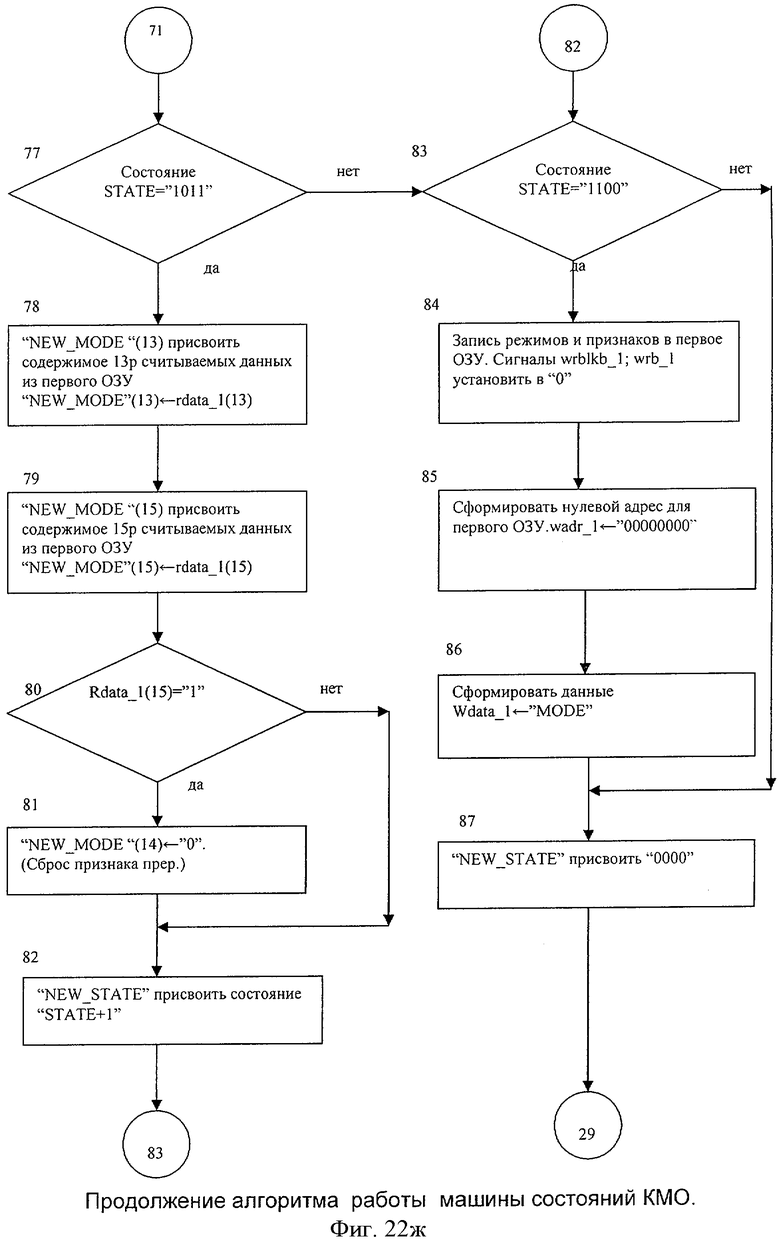
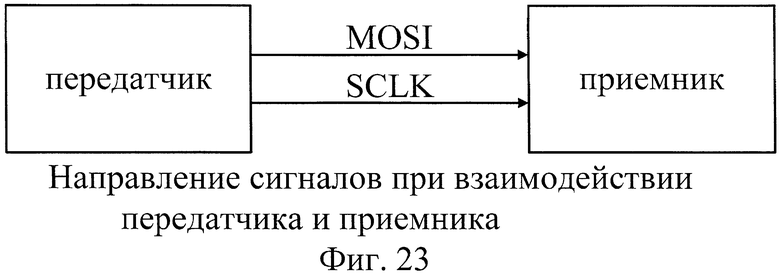

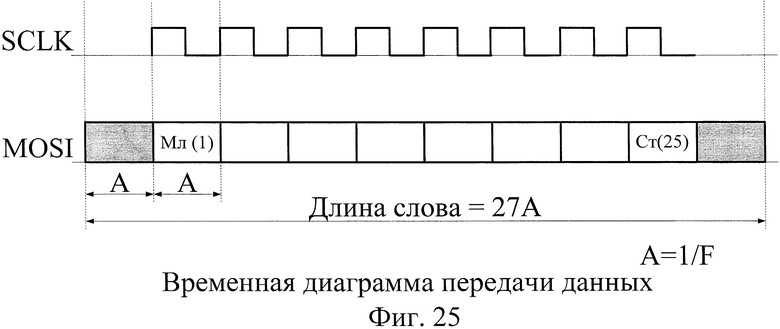
Изобретение относится к технике автоматического управления полетом летательных аппаратов и может быть использовано для улучшения функциональных характеристик привода и для быстрой адаптации систем управления при изменении свойств объектов управления. Техническим результатом является повышение надежности привода и увеличение скорости перемещения гидродвигателя. Система содержит сдвоенный исполнительный гидродвигатель, сдвоенный золотник гидродвигателя, двухсистемную рулевую машинку, сдвоенный золотник рулевой машинки, четырехобмоточный линейный электродвигатель, 4 датчика постоянного тока рулевой машинки, 4 датчика обратной связи гидродвигателя, 4 канала межмашинного обмена, 4 передатчика, 12 приемников, 4 канала адаптивного управления, каждый из которых содержит задатчик, МКО-контроллер, генератор, микроконвертер, усилитель мощности, 5 усилителей, термохолодильник, контроллер холодильника, элемент ИЛИ и корректирующее устройство с моделью, включающее процессор и PID-контроллер. 3 з.п. ф-лы, 40 ил.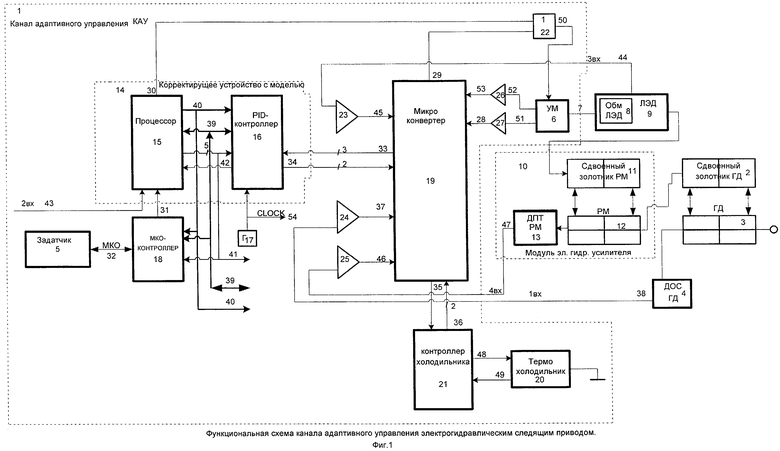
1. Система адаптивного управления электрогидравлическим следящим приводом (ЭГСП), содержащая первый канал адаптивного управления (КАУ), включающий в себя сдвоенный золотник, управляющий сдвоенным исполнительным гидродвигателем, на штоке которого установлен датчик обратной связи, задатчик положения гидродвигателя, усилитель мощности, выход которого является первым выходом КАУ и подключен к обмотке управления линейного электродвигателя, соединенного с модулем электрогидравлического усилителя, включающим в себя сдвоенный золотник рулевой машинки, соединенный с якорем линейного электродвигателя, и двухсистемную рулевую машинку, соединенную со сдвоенным золотником, на штоке которой установлен датчик постоянного тока положения рулевой машинки, а также корректирующее устройство с моделью, причем сдвоенный золотник соединен двумя двунаправленными входами-выходами с двумя двунаправленными входами-выходами сдвоенного исполнительного гидродвигателя, сдвоенный золотник рулевой машинки соединен двумя двунаправленными входами-выходами с двумя двунаправленными входами-выходами двухсистемной рулевой машинкой, отличающаяся тем, что, с целью применения адаптивных средств коррекции для обеспечения системе управления определенных свойств нечувствительности к действию нелинейных и параметрических возмущающих факторов, в канал адаптивного управления дополнительно введены процессор и РID-контроллер, представляющие собой корректирующее устройство с моделью, генератор, МКО-контроллер, микроконвертер, термохолодильник, контроллер холодильника, элемент ИЛИ, первый усилитель, второй усилитель, третий усилитель, четвертый усилитель, пятый усилитель, выход которого соединен в первым входом микроконвертера, первый выход которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с выходом процессора, первый вход которого соединен с выходом МКО-контроллера, первый вход-выход которого соединен со входом-выходом задатчика, причем группа выходов микроконвертера соединена с первой группой входов PID-контроллера, группа выходов которого соединена с первой группой входов микроконвертера, второй выход которого соединен с первым входом контроллера холодильника, группа выходов которого соединена с второй группой входов микроконвертера, второй вход которого соединен с выходом второго усилителя, вход которого соединен с выходом датчика обратной связи гидродвигателя и является первым входом КАУ, причем группа входов-выходов МКО-контроллера является группой входов-выходов КАУ и соединена с группами входов-выходов РID-контроллера и процессора, первая группа выходов которого является первой группой выходов КАУ и соединена со второй группой входов РID-контроллера и с первой группой входов МКО-контроллера, вторая группа входов которого является второй группой выходов КАУ и соединена со второй группой выходов процессора и с третьей группой входов РID-контроллера, выход которого соединен со вторым входом процессора, третий вход которого является вторым входом КАУ, причем выход линейного электродвигателя является третьим входом КАУ и соединен со входом первого усилителя выход которого соединен с третьим входом микроконвертера, четвертый вход которого соединен с выходом третьего усилителя, вход которого соединен с выходом датчика постоянного тока рулевой машинки и является четвертым входом КАУ, выход контроллера холодильника соединен со входом термохолодильника, выход которого соединен со вторым входом контроллера холодильника, выход элемента ИЛИ соединен со входом усилителя мощности, второй и третий выходы которого соединены соответственно со входами пятого усилителя и четвертого усилителя, выход которого соединен с пятым входом микроконвертера, выход генератора соединен со входом РID-контроллера и является вторым выходом КАУ, а с целью повышения надежности в нее дополнительно введены вторая, третья и четвертая обмотки ЛЭД, второй, третий, четвертый датчики ДОС гидродвигателя, второй, третий, четвертый датчики ДПТ РМ, второй, третий и четвертый каналы КАУ, первый, второй, третий, четвертый контроллеры межмашинного обмена (КМО), первый, второй, третий, четвертый передатчики, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый приемники, группы выходов которых соединены с первой, второй, третьей группами входов первого, второго, третьего, четвертого КМО соответственно, первые, вторые, третьи выходы которых соединены с первыми входами приемников соответственно, причем второй вход первого приемника соединен с выходом второго передатчика, со вторыми входами восьмого и одиннадцатого приемников, выход первого передатчика соединен со вторыми входами четвертого, седьмого, десятого приемников, выход третьего передатчика соединен со вторыми входами второго, пятого, двенадцатого приемников, выход четвертого передатчика соединен со вторыми входами третьего, шестого, девятого приемников, группы входов первого, второго, третьего, четвертого передатчиков соединены с группами выходов первого, второго, третьего, четвертого КМО соответственно, четвертые выходы которых соединены с первыми входами первого, второго, третьего, четвертого КАУ соответственно, вторые выходы которых соединены с первыми входами первого, второго, третьего, четвертого КМО, адресные шины, шины данных и управляющие шины которых соединены с адресными шинами, шинами данных и управляющими шинами первого, второго, третьего, четвертого КАУ, вторые входы второго, третьего и четвертого КАУ соединены с выходами второй, третьей и четвертой обмотками ЛЭД соответственно, входы которых соединены с первыми выходами второго, третьего, четвертого КАУ, третьи и четвертые входы которых соединены с выходами вторых, третьих, четвертых датчиков ДОС ГД и ДПТ РМ соответственно.
2. Система адаптивного управления электрогидравлическим следящим приводом по п.1, отличающаяся тем, что контроллер межмашинного обмена содержит первый, второй, третий узлы управления приемом, первый, второй, третий регистры, триггер, машину состояний (МС), узел управления передачей, первое, второе, третье, четвертое, пятое, шестое, седьмое, восьмое двухпортовые ОЗУ, преобразователь шины, соединенный двунаправленной шиной данных с КМО, адресная шина которого соединена с адресными шинами первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого двухпортовых ОЗУ, выходные шины данных которых соединены с входной шиной данных преобразователя шины, выходная шина данных которого соединена со входными шинами данных первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого двухпортовых ОЗУ и входной шиной данных МС, адресные шины записи которой соединены с адресными шинами записи первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого двухпортовых ОЗУ, адресные шины чтения которых соединены с адресными шинами чтения МС, шины данных записи которой соединены с шинами данных записи первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого двухпортовых ОЗУ, входные управляющие шины которых соединены с управляющей шиной КМО, группа выходов которого соединена с группой выходов узла управления передачей, выход которого соединен с первым входом МС, управляющие группы выходов записи и управляющие группы выходов чтения которой соединены с первыми и вторыми группами входов первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого двухпортовых ОЗУ, причем первая группа выходов МС соединена с группой входов узла управления передачей, первый вход которого соединен с первым выходом МС, второй, третий, четвертый, пятый выходы которой являются первым, вторым, третьим, четвертым выходами КМО, первая, вторая, третья группы входов которого соединены с первыми и вторыми входами первого, второго, третьего узлов управления приемом, группы выходов которых соединены с первой, второй, третьей группами входов МС, четвертая, пятая, шестая группы входов которой соединены с группами выходов первого регистра, второго регистра, третьего регистра соответственно, группы входов которых соединены со второй, третьей и четвертой группами выходов МС, шестой выход которой соединен с информационным входом триггера, выход которого соединен со вторым входом МС, третий, четвертый, пятый входы которой соединены с первыми выходами первого, второго, третьего узлов управления приемом, вторые выходы которых соединены с шестым, седьмым, восьмым входами МС, девятый вход которой соединен с первыми входами первого, второго, третьего узлов управления приемом со вторым входом узла управления передачей, со сбросовым входом первого регистра и является первым сигналом управляющей шины КМО, первый вход которого соединен с тактовыми входами первого, второго, третьего регистров и триггера, со вторыми входами первого, второго, третьего узлов управления приемом, третьим входом узла управления передачей и десятым входом МС.
3. Система адаптивного управления электрогидравлическим следящим приводом по п.1, отличающаяся тем, что узел управления передачей содержит сдвиговый регистр, счетчик, дешифратор, триггер, первую группу элементов И, вторую группу элементов И, константу, первый элемент И, второй элемент И, первый элемент ИЛИ, второй элемент ИЛИ, сумматор по mod 2, инвертор, выход которого является вторым сигналом группы выходов узла управления передачей, первый сигнал которой соединен с выходом сдвигового регистра, группа входов которого соединена с первой группой элементов И, группа входов которой соединена с группой входов сумматора по mod 2 и является группой входов узла управления передачей, выход которого соединен с триггером, информационный вход которого соединен с первым входом первого элемента ИЛИ и первым выходом дешифратора, второй выход которого соединен с первым входом второго элемента ИЛИ и вторым входом первого элемента ИЛИ, выход которого соединен с информационным входом счетчика и вторым входом второго элемента ИЛИ, выход которого соединен с разрешающим входом триггера, тактовый вход которого соединен с тактовыми входами сдвигового регистра и счетчика, первым входом первого элемента И и является третьим входом узла управления передачей, первый вход которого соединен с третьим входом первого элемента ИЛИ и вторым входом первого элемента И, выход которого соединен со входами первой и второй групп элементов И и третьим входом второго элемента ИЛИ, причем второй вход узла управления передачей соединен со сбросовыми входами триггера, сдвигового регистра, счетчика, группа выходов которого соединена с группой входов дешифратора, первый выход счетчика соединен со входом инвертора и первым входом второго элемента И, выход которого соединен с информационным входом сдвигового регистра, второй выход счетчика соединен со вторым входом второго элемента И, группа выходов константы соединена с группой входов второй группы элементов И, группа выходов которой соединена с группой входов счетчика, причем выход сумматора по mod 2 соединен со вторым входом первой группы элементов И.
4. Система адаптивного управления электрогидравлическим следящим приводом по п.1, отличающаяся тем, что узел управления приемом содержит первый, второй, третий сдвиговые регистры, счетчик, дешифратор, группу элементов И, сумматор по mod2, первый, второй, третий, четвертый, пятый, шестой, седьмой триггеры, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый элементы И, первый, второй, третий, четвертый элементы ИЛИ, выход которого соединен с информационным входом третьего триггера, выход которого соединен со входом первого элемента ИЛИ, выход которого соединен со сбросовым входом счетчика, группа выходов которого соединена с первым, вторым, третьим, первым инверсным, вторым инверсным входами восьмого элемента И, выход которого соединен с информационным входом второго триггера, выход которого соединен с информационным входом первого триггера, выход которого соединен с первым входом первого элемента И и информационным входом седьмого триггера, выход которого является первым выходом узла управления приемом, второй выход которого соединен с выходом сумматора по mod2, группа входов которого соединена с группой выходов третьего сдвигового регистра и группой входов группы элементов И, группа выходов которой является группой выходов узла управления приемом, группа входов которого соединена с информационными входами первого и второго сдвиговых регистров, первый выход которого соединен с первыми входами пятого и седьмого элементов И, выход которого соединен с первым входом второго элемента ИЛИ, выход которого соединен с информационным входом пятого триггера, выход которого соединен с первым входом девятого элемента И, выход которого соединен с информационным входом шестого триггера, выход которого соединен с первым входом второго элемента И, выход которого соединен с информационным входом третьего сдвигового регистра, тактовый вход которого соединен с тактовыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого триггеров, с тактовыми входами первого, второго сдвиговых регистров и счетчика, со вторым входом первого элемента И и является вторым входом узла управления приемом, первый вход которого соединен со сбросовыми входами первого и второго сдвиговых регистров, второго, третьего, пятого и шестого триггеров, с инверсным входом первого элемента ИЛИ, с установочным входом четвертого триггера, выход которого соединен со входом третьего элемента И и инверсным входом четвертого элемента И, выход которого соединен с информационными входами счетчика и четвертого триггера, со вторым входом второго элемента И и первым входом третьего элемента ИЛИ, выход которого соединен с разрешающим входом четвертого триггера, причем группа выходов первого сдвигового регистра соединена с группой входов дешифратора, первый и второй выходы которого соединены с первым и вторым входами четвертого элемента ИЛИ, первый выход первого сдвигового регистра соединен с первым инверсным входом третьего элемента И и с первым входом четвертого элемента И, второй вход которого соединен со вторым выходом первого сдвигового регистра и со вторым инверсным входом третьего элемента И, выход которого соединен со вторыми входами третьего элемента ИЛИ и девятого элемента И, второй выход второго сдвигового регистра соединен со вторым входом пятого элемента И и первым входом шестого элемента И, выход которого соединен со вторым входом второго элемента ИЛИ, третий вход которого соединен с выходом пятого элемента И, третий выход второго сдвигового регистра соединен со вторыми входами шестого и седьмого элементов И, выход первого элемента И соединен со входом группы элементов И и входом сумматора по mod2.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Электрогидравлическая цифровая следящая система | 1974 |
|
SU517005A1 |
| ЭЛИНВАРНЫЙ МАРТЕНСИТНОСТАРЕЮЩИЙ СПЛАВ | 1992 |
|
RU2026406C1 |
| Копировальный агрегат к универсальным станкам | 1949 |
|
SU93348A1 |

