Предлагаемое изобретение относится к электрогидравлическим следящим приводам с резервированием, предназначенным для использования в высоконадежных системах автоматического управления, например в системах автоматического управления полетом летательных аппаратов.
Известен электрогидравлический следящий привод с непосредственным управлением (см. Борцов А.А., Квасов Г.В., Редько П.Г., Константинов СВ., Тарасов А.З., Кузнецов В.Е. Некоторые вопросы разработки рулевых приводов для высокоавтоматизированных систем управления перспективных маневренных самолетов. Материалы 6-го Международного симпозиума «Авиационные технологии XXI века» 14…20 августа 2001 г., г.Жуковский, ЦАГИ, Тезисы докладов, С.52…54, рис.1) содержащий последовательно соединенные задатчик, усилитель с регулируемым ограничением, предварительный усилитель-сумматор, усилитель мощности, включенный на обмотку управления линейным электродвигателем непосредственно перемещающего посредством якоря шток золотника гидрораспределителя, соединенного с гидроцилиндром, на штоке которого установлен датчик обратной связи, выход которого соединен со вторым входом усилителя с регулируемым ограничением, а также датчик обратной связи положения золотника гидродвигателя, механически сцепленного со штоком золотника, выходной сигнал с которого подается на второй вход предварительного усилителя-сумматора, образуя замкнутый контур следящего привода рулевой машинки.
К недостаткам известного электрогидравлического следящего привода с непосредственным управлением следует отнести повышенную мощность линейного электродвигателя и сильное влияние гидродинамических сил, ухудшающих, как статические характеристики линейного электродвигателя, так и статические характеристики золотников внутреннего и внешнего контуров. Наличие нелинейных характеристик у электрогидравлического следящего привода снижает диапазон регулирования и ухудшает его динамические характеристики.
Известен электрогидравлический следящий привод непосредственного управления с адаптивными свойствами (см. Редько П.Г. Повышение безопасности и улучшение характеристик электрогидравлических следящих приводов. М.: Янус-К; ИЦ МГТУ «Станкин», 2002, стр.149-151, рис.5.12, рис.5.14), содержащий последовательно соединенные задатчик, усилитель с регулируемым ограничением, предварительный усилитель-сумматор, усилитель мощности, включенный на обмотку управления линейным электродвигателем непосредственно перемещающего посредством якоря шток золотника гидрораспределителя, соединенного с гидроцилиндром, на штоке которого установлен датчик обратной связи, выход которого соединен со вторым входом усилителя с регулируемым ограничением, а также датчик обратной связи положения золотника гидродвигателя, механически сцепленного со штоком золотника и адаптивный регулятор с настраиваемой моделью, представляющий собой последовательно соединенные модель контура рулевой машинки, блок сравнения, релейный элемент и малоинерционный фильтр, вход модели соединен с выходом усилителя с регулируемым ограничением, выход датчика обратной связи положения золотника гидродвигателя соединен со вторыми входами предварительного усилителя-сумматора, образуя следящий контур рулевой машинки и вторым входом блока сравнения, второй вход модели соединен с выходом релейного элемента, образуя контур настройки модели адаптивного регулятора, выход фильтра соединен с третьим входом предварительного усилителя, образуя контур адаптивной коррекции рулевой машинки.
Недостатками известного электрогидравлического следящего привода непосредственного управления с адаптивными свойствами является повышенная мощность линейного электродвигателя и наличие нелинейных характеристик во внешнем рулевом контуре следящего привода, кроме того, в схеме двухкаскадного усиления с использованием линейного двигателя непосредственно управляющего гидрораспределителем гидродвигателя имеется сильно выраженная нелинейная зависимость скоростной характеристики (нелинейный коэффициент усиления скоростной характеристики может изменяться в десятки раз) и эффективность «линеаризации» этой характеристики по средствам адаптивного регулятора с настраиваемой моделью недостаточна. Рассмотренная электрогидравлическая компоновка следящего привода уже сама по себе не может иметь требуемый диапазон регулирования и стабильность динамических характеристик при действии внешних возмущений и дестабилизирующих факторов.
Наиболее близким техническим решением является электрогидравлический следящий привод с непосредственным управлением (Редько П.Г., Борцов А.А., Лобанов Ю.И., Квасов Г.В., Константинов С.В., Кузнецов В.Е., Борцов Ю.А. Патент РФ на изобретение №2233464 от 27.07.2004) (прототип), содержащий сдвоенный золотник, управляющий исполнительным гидродвигателем, на штоке которого установлен датчик обратной связи гидродвигателя, и последовательно соединенные задатчик положения гидродвигателя, первый усилитель с регулируемым ограничением и следящий привод рулевой машинки, содержащий последовательно соединенные предварительный усилитель-сумматор и усилитель мощности, подключенный к обмотке управления линейного электродвигателя непосредственного управления сдвоенным золотником, предназначенным для управления двухсистемной рулевой машинкой, на штоке которой установлен датчик обратной связи по положению, а также корректирующее устройство следящего привода рулевой машинки, включающее в себя последовательно соединенные второй усилитель с регулируемым ограничением, первый интегратор, первый блок сравнения, третий усилитель с регулируемым ограничением, первое дифференцирующее звено в ограниченной полосе частот, четвертый усилитель с регулируемым ограничением, выход первого усилителя с регулируемым ограничением соединен со входом предварительного усилителя-сумматора, обратная связь по току обмотки управления линейным электродвигателем непосредственного управления золотником подключена ко второму входу усилителя мощности, входы второго усилителя с регулируемым ограничением соединены с выходами первого усилителя с регулируемым ограничением, первого интегратора и третьего усилителя с регулируемым ограничением, выход датчика обратной связи по положению рулевой машинки соединен со вторыми входами предварительного усилителя-сумматора и первого блока сравнения, выход четвертого усилителя с регулируемым ограничением включен на второй вход предварительного усилителя-сумматора, шток сдвоенного золотника рулевой машинки соединен с якорем линейного электродвигателя непосредственного управления золотником, шток двухсистемной рулевой машинки соединен со штоком сдвоенного золотника гидродвигателя,
К недостаткам известного электрогидравлического следящего привода с непосредственным управлением следует отнести наличие нелинейной скоростной характеристики выходного звена, обусловленной действием гидродинамических сил и сил трения на золотник гидродвигателя.
К другим недостаткам известного привода следует отнести нестабильность и ухудшение его динамических характеристик при действии внешних возмущений, обусловленных шарнирной составляющей аэродинамической нагрузки или изменения давления напора в гидросистеме на входе привода.
Ввиду того, что корректирующее устройство следящего привода рулевой машинки используется только во внутреннем контуре, задачи линеаризации характеристик внешнего контура, а также стабилизация динамических характеристик привода при действии дестабилизирующих воздействий остаются нерешенными.
Технической задачей настоящего изобретения является повышение чувствительности привода в области малых сигналов с одновременным расширением диапазона его регулирования, а также стабилизация его динамических характеристик при действии внешних возмущений нагрузки, что в совокупности и отражает адаптивные свойства привода.
Поставленная задача решается тем, что в предлагаемый электрогидравлический следящий привод непосредственного управления с адаптивными свойствами, содержащий сдвоенный золотник, управляющий исполнительным гидродвигателем, на штоке которого установлен датчик обратной связи гидродвигателя, задатчик положения гидродвигателя и последовательно соединенные первый усилитель с регулируемым ограничением и следящий привод рулевой машинки, содержащий последовательно соединенные предварительный усилитель-сумматор и усилитель мощности, подключенный к обмотке управления линейного электродвигателя непосредственного управления сдвоенным золотником, предназначенным для управления двухсистемной рулевой машинкой, на штоке которой установлен датчик обратной связи по положению, а также корректирующее устройство следящего привода рулевой машинки, включающее в себя последовательно соединенные второй усилитель с регулируемым ограничением, первый интегратор, первый блок сравнения, третий усилитель с регулируемым ограничением, первое дифференцирующее звено в ограниченной полосе частот, четвертый усилитель с регулируемым ограничением, выход первого усилителя с регулируемым ограничением соединен со входом предварительного усилителя-сумматора, обратная связь по току обмотки управления линейным электродвигателем непосредственного управления золотником подключена ко второму входу усилителя мощности, входы второго усилителя с регулируемым ограничением соединены с выходами первого усилителя с регулируемым ограничением, первого интегратора и третьего усилителя с регулируемым ограничением, выход датчика обратной связи по положению рулевой машинки соединен со вторыми входами предварительного усилителя-сумматора и первого блока сравнения, выход четвертого усилителя с регулируемым ограничением включен на третий вход предварительного усилителя-сумматора, шток сдвоенного золотника рулевой машинки соединен с якорем линейного электродвигателя непосредственного управления золотником, шток двухсистемной рулевой машинки соединен со штоком сдвоенного золотника гидродвигателя, дополнительно введены пропорционально-дифференциальный регулятор и корректирующее устройство рулевого привода, включающее в себя первый масштабирующий усилитель и последовательно соединенные первый фильтр, пятый усилитель с регулируемым ограничением, второй интегратор, второй блок сравнения, второе дифференцирующее звено в ограниченной полосе частот, второй масштабирующий усилитель, усилитель сумматор с регулируемым ограничением и второй фильтр, выход задатчика соединен со входом первого фильтра и входом пропорционально дифференциального регулятора, выход которого соединен со входом первого усилителя с регулируемым ограничением, датчик обратной связи гидродвигателя подключен ко вторым входам пропорционально-дифференциального регулятора и второго блока сравнения, выход которого соединен со входом первого масштабирующего усилителя, выход второго интегратора соединен со вторым входом первого фильтра, выход первого масштабирующего усилителя подключен ко второму входу усилителя-сумматора с регулируемым ограничением, выход второго фильтра соединен со вторым входом первого усилителя с регулируемым ограничением.
Согласно изобретению основным отличием от прототипа предлагаемого электрогидравлического следящего привода непосредственного управления с адаптивными свойствами заключается во введении корректирующего устройства рулевого привода, а также замыкании внешнего контура через вновь введенный пропорционально-дифференциальный регулятор и подключении выходного корректирующего сигнала, в отличие от прототипа, внутрь внешнего контура через усилитель с регулируемым ограничением. В результате новой схемы подключения, контур коррекции рулевого привода оказывается подчиненным основному контуру рулевого привода с введенным в него пропорционально-дифференциальным регулятором (законом управления), и тем самым сигнал управления привода оказывается профильтрованным от помех, вносимых сигналом коррекции. Последнее обстоятельство позволяет увеличить уровень корректирующего воздействия, а следовательно увеличить чувствительность привода в области малых сигналов с одновременным расширением диапазона его регулирования.
Кроме того, в отличие от прототипа, корректирующее устройство рулевого привода содержит модель корректируемого контура уже второго порядка, где динамика первого фильтра отражает желаемое быстродействие следящего привода рулевой машинки. Ограничение максимальной скорости гидродвигателя учитывается в пятом усилителе с регулируемым ограничением.
Согласно изобретению отличием от прототипа является то, что корректирующий сигнал представляется в виде линейной комбинации сигнала рассогласования модели и контура рулевого привода, снимаемого со второго блока сравнения, а также его производной, реализуемой на реальном дифференцирующем звене в ограниченной полосе частот. Последнее позволяет не только стабилизировать динамические характеристики, но и улучшить статические, а это в свою очередь расширяет диапазон регулирования и увеличивает чувствительность привода в области малых сигналов в условиях действия внешнего момента, а также изменения давления нагнетания на входе привода.
Согласно изобретению в контур рулевого следящего привода введен новый блок - пропорционально дифференциального регулятора, который решает две задачи: улучшает динамические характеристики рулевого контура и дополнительно фильтрует сигнал с корректирующего устройства рулевого привода, что позволяет увеличивать уровень корректирующего сигнала. Пропорционально дифференциальный регулятор представляет собой звено с передаточной функцией W(p)=k1+k2Tp/(Tp+1), где k1 и k2 - весовые коэффициенты, соответственно, пропорциональной и дифференциальной частей.
Сущность предлагаемого изобретения поясняется чертежами, где:
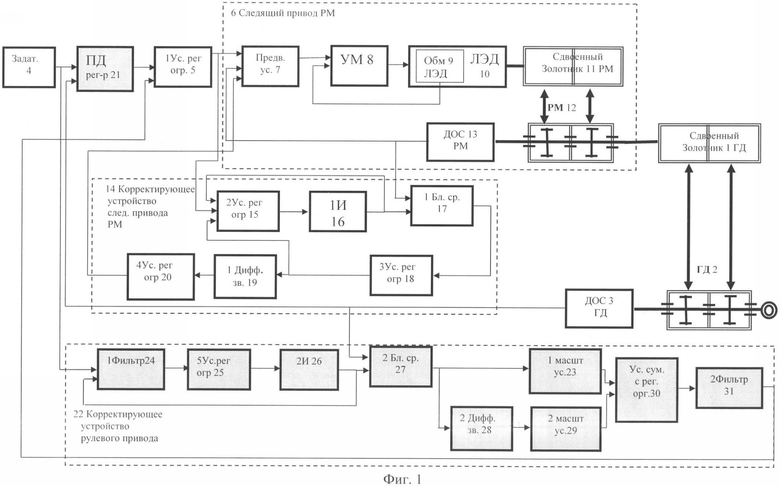
- на фиг.1 приведена структурная схема привода;
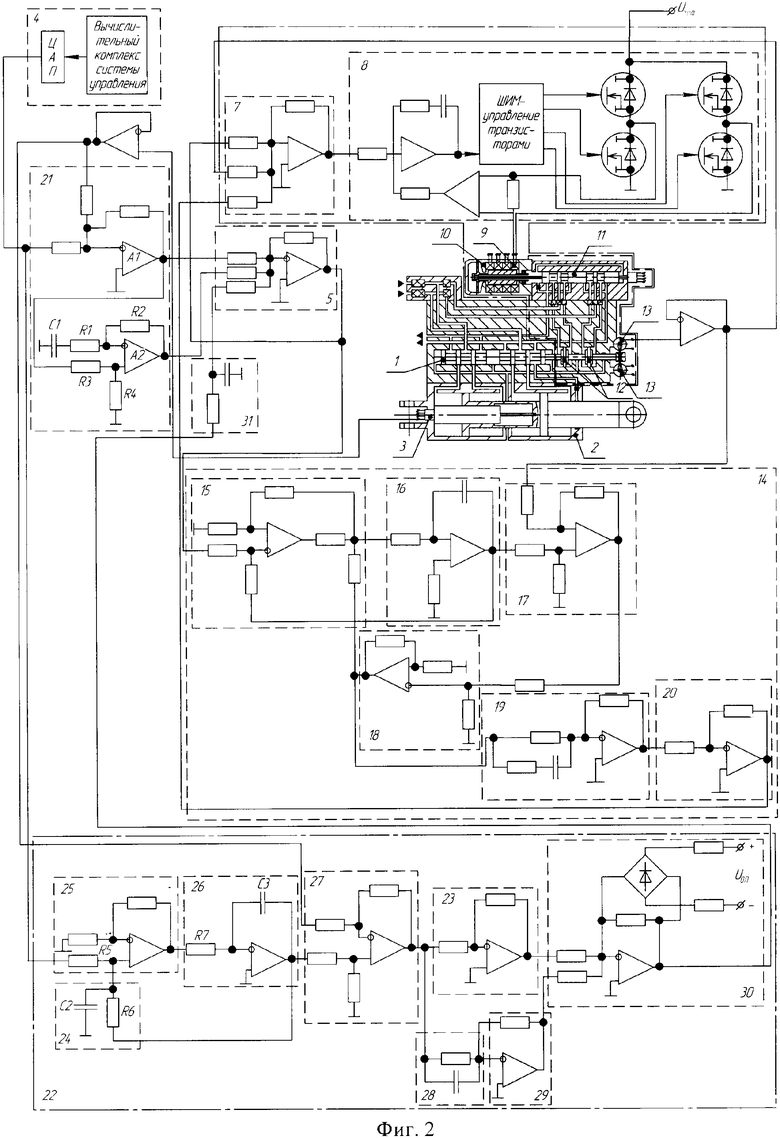
- на фиг.2 приведена функциональная схема привода.
Электрогидравлический следящий привод непосредственного управления с адаптивными свойствами (фиг.1) содержит сдвоенный золотник 1, управляющий сдвоенным исполнительным гидродвигателем 2, на штоке которого установлен датчик 3 обратной связи гидродвигателя, задатчик 4 положения гидродвигателя, последовательно соединенные первый усилитель с регулируемым ограничением 5 и следящий привод рулевой машинки 6, содержащий последовательно соединенные предварительный усилитель-сумматор 7 и усилитель мощности 8, подключенный к обмотке управления 9 линейного электродвигателя 10, якорь которого соединен со сдвоенным золотником 11, управляющим рулевой машинкой 12, на штоке которой установлен датчик 13 обратной связи по положению рулевой машинки, корректирующее устройство следящего привода рулевой машинки 14, включающее в себя последовательно соединенные второй усилитель 15 с регулируемым ограничением, первый интегратор 16, первый блок сравнения 17, третий усилитель 18 с регулируемым ограничением, первое дифференцирующее звено 19 в ограниченной полосе частот и четвертый усилитель 20 с регулируемым ограничением, а также пропорционально-дифференциальный регулятор 21 и корректирующее устройство рулевого привода 22, включающее в себя первый масштабирующий усилитель 23 и последовательно соединенные первый фильтр 24, пятый усилитель 25 с регулируемым ограничением, второй интегратор 26, второй блок сравнения 27, второе дифференцирующее звено 28, второй масштабирующий усилитель 29, усилитель-сумматор с регулируемым ограничением 30 и второй фильтр 31, выход первого усилителя 5 с регулируемым ограничением соединен со входом предварительного усилителя-сумматора 7, обратная связь по току обмотки 9 управления линейным электродвигателем 10 непосредственного управления золотником подключена ко второму входу усилителя мощности 8, входы второго усилителя 15 с регулируемым ограничением соединены с выходами первого усилителя 5 с регулируемым ограничением, первого интегратора 16 и третьего усилителя с регулируемым ограничением 18, выход датчика обратной связи 13 по положению рулевой машинки соединен со вторыми входами предварительного усилителя-сумматора 7 и первого блока сравнения 17, выход четвертого усилителя 20 с регулируемым ограничением включен на третий вход предварительного усилителя-сумматора 7, шток сдвоенного золотника 11 рулевой машинки соединен с якорем линейного электродвигателя 10 непосредственного управления золотником, шток двухсистемной рулевой машинки 12 соединен со штоком сдвоенного золотника гидродвигателя 1, выход задатчика 4 соединен со входом первого фильтра 24 и входом пропорционально дифференциального регулятора 21, выход которого соединен со входом первого усилителя 5 с регулируемым ограничением, датчик обратной связи 3 гидродвигателя подключен ко вторым входам пропорционально-дифференциального регулятора 21 и второго блока сравнения 27, выход которого соединен со входом первого масштабирующего усилителя 23, выход второго интегратора 26 соединен со вторым входом первого фильтра 24, выход первого масштабирующего усилителя 23 подключен ко второму входу усилителя-сумматора с регулируемым ограничением 30, выход второго фильтра 31 соединен со вторым входом первого усилителя 5 с регулируемым ограничением.
Электрогидравлический следящий привод непосредственного управления с адаптивными свойствами работает следующим образом.
С задатчика 4 положения гидродвигателя входной сигнал управления через последовательно соединенные пропорционально дифференциальный регулятор 21, первый усилитель 5 с регулируемым ограничением, поступает на вход предварительного усилителя-сумматора 7, являющегося входным усилителем следящего привода 6 рулевой машинки. Далее сигнал управления через усилитель мощности 8 поступает в обмотки управления 9 линейного электродвигателя 10, вызывая пропорциональное сигналу управления смещение от нейтрального положения якоря и непосредственно соединенного с ним золотника 11. Рабочая жидкость под давлением через открытые щели в золотнике поступает в камеры двухсистемной рулевой машинки 12, перемещая шток рулевой машинки и связанный с ним сдвоенный золотник 1, который управляет перемещением сдвоенного исполнительного гидродвигателя 2, положение которого измеряется датчиком обратной связи 3, установленным на штоке сдвоенного гидродвигателя 2. Выходное напряжение с датчика обратной связи 3 поступает на второй вход пропорционально дифференциального усилителя 21, образуя таким образом замкнутый контур электрогидравлического следящего рулевого привода.
Отрицательная обратная связь по положению двухсистемной рулевой машинки 12, замкнутая на второй вход предварительного усилителя-сумматора 7 через датчик 13 обратной связи образует внутренний контур электрогидравлического следящего рулевого привода - следящий привод 6 рулевой машинки.
С целью формирования у привода адаптивных свойств, т.е. обеспечения ему заданных динамических характеристик в широком диапазоне регулирования при влиянии нелинейных характеристик и действии внешних возмущающих воздействий и нагрузки, в приводе:
во-первых, снижается мощность линейного электродвигателя непосредственного управления золотником за счет введения еще одного гидравлического каскада усиления (рулевая машинка 12, управляемая золотником 11), что приводит к уменьшению нелинейной зависимости его статической характеристики, кроме того для уменьшения инерционности обмотки управления 9 организована отрицательная обратная связь по ее току, которая замкнута на второй вход усилителя мощности 8,
во-вторых, применяются корректирующие устройства во внутреннем и внешнем следящих контурах.
Линеаризация нелинейной характеристики линейного электродвигателя 10 осуществляются путем введения корректирующего устройства следящего привода рулевой машинки 14, которое работает следующим образом.
Сигнал ошибки позиционирования привода с выхода первого усилителя 5 с регулируемым ограничением одновременно поступает на вход следящего привода рулевой машинки 6 и на вход его упрощенной модели, т.е. на вход второго усилителя 15 с регулируемым ограничением, который охвачен отрицательной обратной связью через интегратор 16. Сигнал модели с выхода интегратора 16 сравнивается на блоке сравнения 17 с сигналом датчика 13 положения рулевой машинки. Результат сравнения через последовательно соединенные третий усилитель 18 с регулируемым ограничением, дифференцирующее звено 19 в ограниченной полосе частот и четвертый усилитель 20 с регулируемым ограничением подается на второй вход предварительного усилителя 7.
Сигнал коррекции, добавленный к основному сигналу управления с выхода пропорционально дифференциального регулятора 21, позволяет снизить влияние зоны нечувствительности следящего привода 6, обусловленную трением в золотнике, т.е. расширить диапазон регулирования, а также улучшить динамические свойства следящего привода рулевой машинки за счет линеаризации характеристики линейного электродвигателя.
Уровень корректирующего воздействия регулируется с помощью введения в действие ограничения в усилителях: 15, 18 и 20.
В области действия малых входных сигналов, когда ход золотника 11 не ограничен, ограничения в усилителях 15, 18 и 20 не возникает и уровень корректирующего сигнала максимален.
В области больших сигналов, когда ход золотника ограничен, а скорость его максимальна - уровень коррекции значительно ограничен.
Сначала вступает в силу ограничение на втором усилителе с регулируемым ограничением 15, которое ограничивает максимальную скорость модели. При дальнейшем увеличении сигнала ограничиваются усиление на третьем усилителе с регулируемым ограничением 18 и начинает снижаться уровень ограничения на первом усилителе 15. Данная связь не дает модели сильно опережать следящий привод рулевой машинки 6. В режиме ограничений на блоке сравнения 17 сравниваются примерно равные по уровню сигналы с ограниченными равными темпами изменения.
Задачей, решаемой корректирующим устройством рулевого привода 22, является линеаризация его скоростной характеристики, повышении чувствительности привода, а также стабилизации его динамических характеристик с одновременным расширением диапазона регулирования при действии внешних возмущений, связанных с изменением перепада давления нагнетания на входе в привод и при действии внешних возмущений со стороны нагрузки. Корректирующее устройство работает следующим образом.
Сигнал с задатчика 4 положения гидродвигателя 2 одновременно поступает на вход пропорционально-дифференциального регулятора 21, являющегося входом рулевого следящего привода и на вход модели, отражающей динамические процессы в следящем приводе рулевой машинки и представляющей собой последовательно соединенные первый фильтр 24, пятый усилитель 25 с регулируемым ограничением и второй интегратор 26. Выход интегратора соединен со вторым входом фильтра, образуя замкнутую систему второго порядка с заданными динамическими характеристиками. Ограничение на максимальную скорость золотника 1 гидродвигателя реализовано в модели по средствам пятого усилителя 25 с регулируемым ограничением. На втором блоке сравнения 27 формируется сигнал рассогласования между выходом модели и положением рулевого привода. Корректирующий сигнал, представляющий собой сумму сигнала рассогласования и его производной, формируется на усилителе с регулируемым ограничением 30. Масштабы этих сигналов определяются, соответственно, первым и вторым масштабными усилителями 23 и 29. Производная сигнала рассогласования реализуется на втором дифференцирующем звене 28 в ограниченной полосе частот.
Повышение чувствительности привода в области малых сигналов и расширение диапазона его регулирования достигается при введении корректирующего сигнала, предварительно отфильтровав его через малоинерционный фильтр 31, на второй вход первого усилителя 5 с регулируемым ограничением. Дополнительно для решения указанной задачи в основной контур рулевого привода вводится пропорционально дифференциальный регулятор, действие которого при рассмотрении процессов в динамике, аналогично действию звена с переменной крутизной усиления. На малых уровнях сигнала характеристика идет круче, чем на больших, повышая чувствительность привода.
Действие на привод внешних возмущений в виде изменения питающего давления в магистрали или внешних моментов от аэродинамических сил аналогично введению в контур звеньев с переменным коэффициентом усиления, для ослабления влияния которых и вводится корректирующее устройство рулевого привода 22.
Снижение уровня корректирующего воздействия при больших уровнях сигналов решается при помощи использования регулируемого ограничения на усилителях-сумматорах 30 и 5. Фильтрация от помех, вносимых в основной тракт управления рулевого привода производится при помощи малоинерционного фильтра 31, а также за счет схемы введения корректирующего сигнала в основной контур рулевого привода. Сигнал коррекции с выхода фильтра 31 подается не на вход основного контура, а после регулятора 21 - на второй вход усилителя 5 с регулируемым ограничением. В этом случае сумма пропорциональной и дифференциальной частей регулятора 21 оказывает фильтрующее действие на сигнал с корректирующего устройства рулевого привода 22.
В заявляемом электрогидравлическом следящем приводе непосредственного управления с адаптивными свойствами за счет введения корректирующего устройства рулевого привода 22, пропорционально дифференциального регулятора и новых дополнительных связей формируются заданные характеристики: повышается чувствительность привода в области малых сигналов с одновременным расширением диапазона его регулирования, а также стабилизируются динамические характеристики привода при действии внешних дестабилизирующих воздействий и нагрузки, что в целом свидетельствует об адаптивности (адаптивных свойствах) рулевого следящего гидропривода.
Электрогидравлический следящий привод непосредственного управления с адаптивными свойствами может быть реализован следующим образом: на фиг.2 приведен вариант реализации электрогидравлического следящего привода.
Электрогидравлический следящий привод непосредственного управления с адаптивными свойствами с одним каналом управления (остальные каналы одинаковые и здесь не рассматриваются) может быть реализован следующим образом.
Первый каскад усиления электрогидравлического следящего привода реализован на усилителе мощности 8, например известном транзисторном с широтно-импульсным режимом работы, выход которого подключен к обмотке управления 9 линейного электродвигателя 10, который реализован известным образом, например с постоянными магнитами на якоре, катушками управления на статоре и центрирующей пружиной, удерживающей якорь в нейтральном положении в отсутствии тока управления с обмоток 9. По току управления реализована отрицательная обратная связь на вход усилителя мощности 8.
Второй каскад усиления реализован на сдвоенном золотнике 11 рулевой машинки, рулевая машинка 12 и датчик 13 обратной связи рулевой машинки представляют единое целое. Электрогидравлический усилитель (сдвоенный золотник 11 - рулевая машинка 12) с двумя независимыми каналами имеют известную реализацию.
Золотник 11 имеет короткий ход и околонулевые перекрытия и через гибкий стержень механически связан с якорем линейного электродвигателя 10 и центрирующей пружиной, которая соосно закреплена относительно якоря линейного электродвигателя и золотника 11. Такое соединение обеспечивает их соосность относительно друг друга.
Благодаря незначительности действующих на золотник 11 гидродинамических сил, уровень внешних сил для его перемещений незначителен.
Эти причины позволили применить линейный электродвигатель 10 минимальных размеров и мощности.
Гидродвигатели 12 рулевой машинки имеют известную реализацию. Шток рулевой машинки 12 механически соединен с датчиком 13 обратной связи.
В качестве датчика 13 обратной связи используется датчик постоянного тока, который реализован в виде потенциометра поворотного типа, использующего токопроводящую пластмассу. (Аналогом может быть известный потенциометр типа ПТ1-4 с углом поворота 70°).
Для преобразования поступательного движения рулевой машинки 12 в расчетный поворот вала датчика 13 использован известный поводок (рычаг).
Третий каскад электрогидравлического следящего привода непосредственного управления использует сдвоенный золотник 1, жестко соединенный со штоком рулевой машинки 12 и гидродвигателя 2 в виде тандемного гидроцилиндра. На штоке гидродвигателя 2 установлен датчик обратной связи 3, например линейный датчик постоянного тока на токопроводящей пластмассе. Все элементы третьего каскада усиления имеют известные реализации.
Первый и второй усилитель-сумматор 5 и 7 реализованы на операционных усилителях. В качестве задатчика входного сигнала 4 может быть использован выход по напряжению, например, цифро-аналогового преобразователя (ЦАП) вычислительного комплекса системы управления, формирующий выходной сигнал, соответствующий заданному положению штока гидродвигателя 2 следящего привода.
Корректирующее устройство 14 следящего привода рулевой машинки 12 имеет известную реализацию и включает: второй, третий и четвертый усилители с регулируемым ограничением 15, 18 и 20 реализованы на операционных усилителях с естественным ограничением; первый интегратор 16 и дифференцирующее звено 19 реализованы в виде пассивных RC-фильтров, подключенных соответствующим образом к операционным усилителям (фиг.2); блок сравнения 17 выполнен на операционном усилителе, принимающем на разные входы сигналы с выхода блока 16 и датчика 13 постоянного тока рулевой машинки 12. Следует заметить, что указанное выше корректирующее устройство 14 способствует линеаризации динамических характеристик следящего привода контура рулевой машинки 12 при действии дестабилизирующих внешних возмущений, что способствует улучшению динамических характеристик электрогидравлического следящего привода.
Вновь введенные пропорционально-дифференциальный регулятор 21 и корректирующее устройство 22 рулевого привода реализованы следующим образом.
Пропорционально-дифференциальный регулятор 21 (фиг.2) реализован на двух операционных усилителях (А1, А2). Выход усилителя А1 образует пропорциональную часть, а выход А2 с цепочкой (R1, C1) - дифференциальную часть. Реализация суммарного сигнала ПД-регулятора осуществляется на операционном усилителе с регулируемым ограничением 5. Выбором значений резисторов R1, R2, R3 и R4 и емкости конденсатора C1 определяется область фильтрации из условия требуемых динамических характеристик привода и его устойчивости при воздействии на него таких дестабилизирующих факторов, например как упругомассовой нагрузки органа управления (например, аэродинамической поверхности) или внешней возбуждающей аэродинамической силы (момента), действующих на шток гидродвигателя 2, или помех, вносимых сигналом корректирующего устройства 22 рулевого привода.
Желаемую траекторию движения штока гидродвигателя 2 определяет модель привода, которая включает последовательно соединенные первый фильтр 24, пятый усилитель с регулируемым ограничением 25 и второй интегратор 26, охваченные общей позиционной обратной связью с выхода интегратора 26 на вход фильтра 24. Первый фильтр 24 выполнен в виде апериодического фильтра первого порядка и имеет известную реализацию в виде пассивного RC-фильтра, включенного на вход операционного усилителя. Выбором значений резисторов R5, R6 (R5=R6) и емкости конденсатора С2 определяется желаемое быстродействие (добротность) следящего привода рулевой машинки 12. Пятый усилитель с регулируемым ограничением 25 реализован на операционном усилителе с естественным ограничением, которое определяет желаемое ограничение максимальной скорости перемещения штока гидродвигателя 2. Второй интегратор 26 реализован известным образом на операционном усилителе, в обратной связи которого установлен конденсатор с определенной емкостью (С3, фиг.2). Выбором значений резистора R7 и емкости конденсатора С3 определяется желаемая динамика следящего привода.
Второй блок сравнения 27 выполнен известным образом, например на операционном усилителе, принимающем сигналы с выхода блока 26 и датчика 3 постоянного тока гидродвигателя 2.
Второе дифференцирующее звено 28 предназначено для формирования производной (скорости изменения) корректирующего сигнала в ограниченной полосе частот, поступающего с блока сравнения 27, и имеет известную реализацию, например в виде пассивного RC-фильтра, установленного на входе операционного усилителя. Выбором значений параметров резисторов и емкости конденсатора определяется область частот дифференцирования из условия обеспечения желаемых динамических характеристик следящего привода и потребных запасов его устойчивости по амплитуде и фазе. Первый и второй масштабирующие усилители 23 и 29 реализованы известным образом на операционных усилителях.
Усилитель-сумматор с регулируемым ограничением 30 может быть выполнен известным образом, например на операционном усилителе, принимающем сигналы с первого и второго масштабирующих усилителей 23 и 29 и формирующем на выходе корректирующий сигнал в виде линейной комбинации сигнала рассогласования модели и следящего контура привода и его производной (скорости изменения). Ограничение корректирующего сигнала на выходе усилителя-сумматора 30 обеспечивается за счет использования специального ограничителя, который имеет известную реализацию, например на диодных мостах, одна из диагоналей которого подключена в обратную связь операционного усилителя. При этом регулировка максимального напряжения на выходе усилителя-сумматора 30 обеспечивается посредством выбора оптимального значения опорного напряжения (±UОП, фиг.2) диодных мостов из условия обеспечения требуемой полосы пропускания привода при больших сигналах управления.
Второй фильтр 31 выполнен в виде апериодического фильтра первого порядка известным образом в виде пассивного RC-фильтра, который подключен последовательно с выхода усилителя-сумматора 30 на вход первого усилителя с регулируемым ограничением 5 параллельно основному входному сигналу с выхода пропорционально-дифференциального регулятора 21.
В данном электрогидравлическом следящем приводе с непосредственным управлением за счет введения дополнительно пропорционально-дифференциального регулятора 21 и корректирующего устройства 22 с моделью (блоки 24÷31) обеспечиваются дополнительно по сравнению с известным прототипом стабилизация динамических и статических характеристик привода и расширение диапазона регулирования при воздействии на привод не только внешних и внутренних параметрических возмущений, но и внешнего аэродинамического момента, упруго-массовой нагрузки и изменения давления в линии нагнетания гидросистемы на входе привода, что придает ему адаптивные свойства в расчетном диапазоне входных управляющих сигналов и в реальных условиях эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| Система адаптивного управления электрогидравлическим следящим приводом с контролем | 2015 |
|
RU2610851C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| РУЛЕВОЙ АГРЕГАТ | 2006 |
|
RU2313699C2 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |
Изобретение относится к области автоматики и может быть использовано в системах автоматического управления полетом летательных аппаратов. Техническим результатом является повышение чувствительности привода в области малых сигналов с одновременным расширением диапазона его регулирования и стабилизация его динамических характеристик при действии внешних возмущений нагрузки. В Электрогидравлический следящий привод введены пропорционально-дифференциальный регулятор и корректирующее устройство рулевого привода, включающее в себя первый масштабирующий усилитель, первый фильтр, пятый усилитель с регулируемым ограничением, второй интегратор, второй блок сравнения, второе дифференцирующее звено в ограниченной полосе частот, второй масштабирующий усилитель, усилитель-сумматор с регулируемым ограничением и второй фильтр, соединенные между собой и с другими узлами электрогидравлического следящего привода так, как указано в материалах заявки. 2 ил.
Электрогидравлический следящий привод непосредственного управления с адаптивными свойствами, содержащий сдвоенный золотник, управляющий исполнительным гидродвигателем, на штоке которого установлен датчик обратной связи гидродвигателя, задатчик положения гидродвигателя и последовательно соединенные первый усилитель с регулируемым ограничением и следящий привод рулевой машинки, содержащий последовательно соединенные предварительный усилитель-сумматор и усилитель мощности, подключенный к обмотке управления линейного электродвигателя непосредственного управления сдвоенным золотником, предназначенным для управления двухсистемной рулевой машинкой, на штоке которой установлен датчик обратной связи по положению, а также корректирующее устройство следящего привода рулевой машинки, включающее в себя последовательно соединенные второй усилитель с регулируемым ограничением, первый интегратор, первый блок сравнения, третий усилитель с регулируемым ограничением, первое дифференцирующее звено в ограниченной полосе частот, четвертый усилитель с регулируемым ограничением, выход первого усилителя с регулируемым ограничением соединен со входом предварительного усилителя-сумматора, обратная связь по току обмотки управления линейным электродвигателем непосредственного управления золотником подключена ко второму входу усилителя мощности, входы второго усилителя с регулируемым ограничением соединены с выходами первого усилителя с регулируемым ограничением, первого интегратора и третьего усилителя с регулируемым ограничением, выход датчика обратной связи по положению рулевой машинки соединен со вторыми входами предварительного усилителя-сумматора и первого блока сравнения, выход четвертого усилителя с регулируемым ограничением включен на третий вход предварительного усилителя-сумматора, шток сдвоенного золотника рулевой машинки соединен с якорем линейного электродвигателя непосредственного управления золотником, шток двухсистемной рулевой машинки соединен со штоком сдвоенного золотника гидродвигателя, отличающийся тем, что в него введены пропорционально-дифференциальный регулятор и корректирующее устройство рулевого привода, включающее в себя первый масштабирующий усилитель и последовательно соединенные первый фильтр, пятый усилитель с регулируемым ограничением, второй интегратор, второй блок сравнения, второе дифференцирующее звено в ограниченной полосе частот, второй масштабирующий усилитель, усилитель-сумматор с регулируемым ограничением и второй фильтр, выход задатчика соединен со входом первого фильтра и входом пропорционально дифференциального регулятора, выход которого соединен со входом первого усилителя с регулируемым ограничением, датчик обратной связи гидродвигателя подключен ко вторым входам пропорционально-дифференциального регулятора и второго блока сравнения, выход которого соединен со входом первого масштабирующего усилителя, выход второго интегратора соединен со вторым входом первого фильтра, выход первого масштабирующего усилителя подключен ко второму входу усилителя-сумматора с регулируемым ограничением, выход второго фильтра соединен со вторым входом первого усилителя с регулируемым ограничением.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПОКРЫТИЙ С СИЛЬНОЙ АДГЕЗИЕЙ | 2003 |
|
RU2301117C2 |
| Система управления электрогидравлическими манипуляторами | 1977 |
|
SU750425A1 |
| ЭЛИНВАРНЫЙ МАРТЕНСИТНОСТАРЕЮЩИЙ СПЛАВ | 1992 |
|
RU2026406C1 |
| JP 59017971 A, 06.06.1984 | |||
| Копировальный агрегат к универсальным станкам | 1949 |
|
SU93348A1 |
| WO 9113261 A1, 05.09.1991. | |||

