Область техники, к которой относится изобретение
Группа изобретений относится к области компонентов систем управления беспилотных летательных аппаратов (БПЛА) и может быть использована для удержания беспилотных летательных аппаратов, выполняющих роль ретрансляторов радиосигналов в окрестности источника передачи данных, а также для возврата БПЛА в район пульта управления в случае потери сигнала спутниковой навигации.
Уровень техники
Из уровня техники известны автопилоты с открытым кодом ArduPilot и PX4, обладающие возможностью удержания позиции БПЛА с заданными географическими координатами [ArduPilot: Loiter Mode, URL: https://ardupilot.org/copter/docs/loiter-mode.html, дата обращения: 25.06.2024; PX4 User Guide (v1.12): Hold Mode, URL: https://docs.px4.io/v1.12/en/flight_modes/hold.html, дата обращения: 25.06.2024]. Недостатком данных автопилотов является невозможность удержания позиции в случае влияния электромагнитных помех на показания магнитометров и/или отсутствие устойчивого приёма сигналов глобальных спутниковых навигационных систем.
Для преодоления данного недостатка совместно с автопилотами используют различные навигационные системы, не требующие приёма сигналов глобальных спутниковых навигационных систем [ArduPilot: Non-GPS Navigation URL: https://ardupilot.org/copter/docs/common-non-gps-navigation-landing-page.html, дата обращения: 25.06.2024], основанные на радионавигационных маяках стандарта ultra-wideband (UWB) и ультразвуковой навигации. Недостатком использования данных навигационных систем является невозможность работы на дальностях более 200 м между БПЛА и маяками, что не позволяет осуществлять для удержания позиции БПЛА на высотах более 200 м.
Из уровня техники известны [RU 2714977 C1, опубл. 21.02.2020] способ и система автоматического управления дроном, которые обладают всей совокупностью недостатков вышеперечисленных методов.
Из уровня техники известен [RU 2615587 C1, опубл. 05.04.2017] способ точной посадки беспилотного летательного аппарата, предполагающий удержание позиции БПЛА в процессе посадки на основе использования оптической камеры, по данным которой осуществляется смещение аппарата в сторону заранее установленной оптической метки. Недостатком данного способа является невозможность его применения в условиях ограниченной видимости (например, тумана).
Аналогичным недостатком обладают и БПЛА, оснащённые известной из уровня техники [RU 195749 U1, опубл. 05.02.2020] интеллектуальной системой технического зрения беспилотного летательного аппарата для решения задач навигации, построения трехмерной карты окружающего пространства и препятствий и автономного патрулирования. В дополнение к этому, для их функционирования требуется использовать дорогостоящие лазерные дальномеры.
Из уровня техники [Rosser K. et al. Low complexity visual UAV track navigation using long‐wavelength infrared //Journal of Field Robotics. – 2021. – Т. 38. – №. 6. – С. 882-897] известен метод навигации и удержания позиции БПЛА на основе использования видеокамеры инфракрасного диапазона, недостатком которого является существенный дрейф в условиях ветра.
Раскрытие сущности изобретения
Предлагаемая группа изобретений направлена на решение технической задачи по устранению вышеперечисленных недостатков известных технических решений.
Достигаемый при этом технический результат заключается в обеспечении удержания позиции БПЛА в окрестности заданного объекта на удалении от него не более 150 м по горизонтали в условиях ветра на высоте более 200 м над заданным объектом без использования сигналов глобальных спутниковых навигационных систем, показаний магнитометров, маяков стандарта UWB и ультразвуковой навигации, лазерных дальномеров, а также видеокамер и основанных на них систем технического зрения.
Технический результат достигается способом удержания позиции БПЛА в окрестности заданного объекта, в соответствии с которым в режиме стабилизации горизонта и удержания заданной высоты беспилотный летательный аппарат перемещается с воздушной скоростью, превышающей скорость ветра, при этом в случаях, когда дистанция до заданного объекта сокращается или остаётся неизменной, снижает скорость монотонного изменения курса, одновременно увеличивая воздушную скорость прямолинейного движения по курсу, а в случаях, когда дистанция до заданного объекта увеличивается, повышает скорость монотонного изменения курса, одновременно снижая воздушную скорость прямолинейного движения по курсу.
Технический результат также достигается вариантами устройства для удержания позиции в окрестности заданного объекта беспилотным летальным аппаратом.
В одном из вариантов устройство содержит приёмник радиосигнала от передатчика, установленного на заданном объекте, при этом указанный приёмник подключён к блоку управления, реализующему предложенный способ удержания позиции беспилотным летальным аппаратом в окрестности заданного объекта, выходы которого подключены к входам управления скоростью монотонного изменения курса и воздушной скоростью прямолинейного движения по курсу полётного контроллера, обеспечивающего режимы стабилизации горизонта и удержания заданной высоты беспилотного летательного аппарата.
В другом варианте устройство содержит приёмник радиосигнала от передатчика, установленного на заданном объекте, подключенный к полётному контроллеру, обеспечивающему режимы стабилизации горизонта и удержания заданной высоты беспилотного летательного аппарата, а также реализующему предложенный способ удержания позиции беспилотным летальным аппаратом в окрестности заданного объекта и использующему полученные в результате этого целевые значения скорости монотонного изменения курса и воздушной скорости прямолинейного движения по курсу в качестве задающих значений для управления скоростью монотонного изменения курса и воздушной скоростью прямолинейного движения по курсу беспилотного летательного аппарата.
Указанные признаки группы изобретений являются существенными и совокупность этих признаков достаточна для получения требуемого технического результата.
Краткое описание чертежей
Изобретение поясняется следующими чертежами.
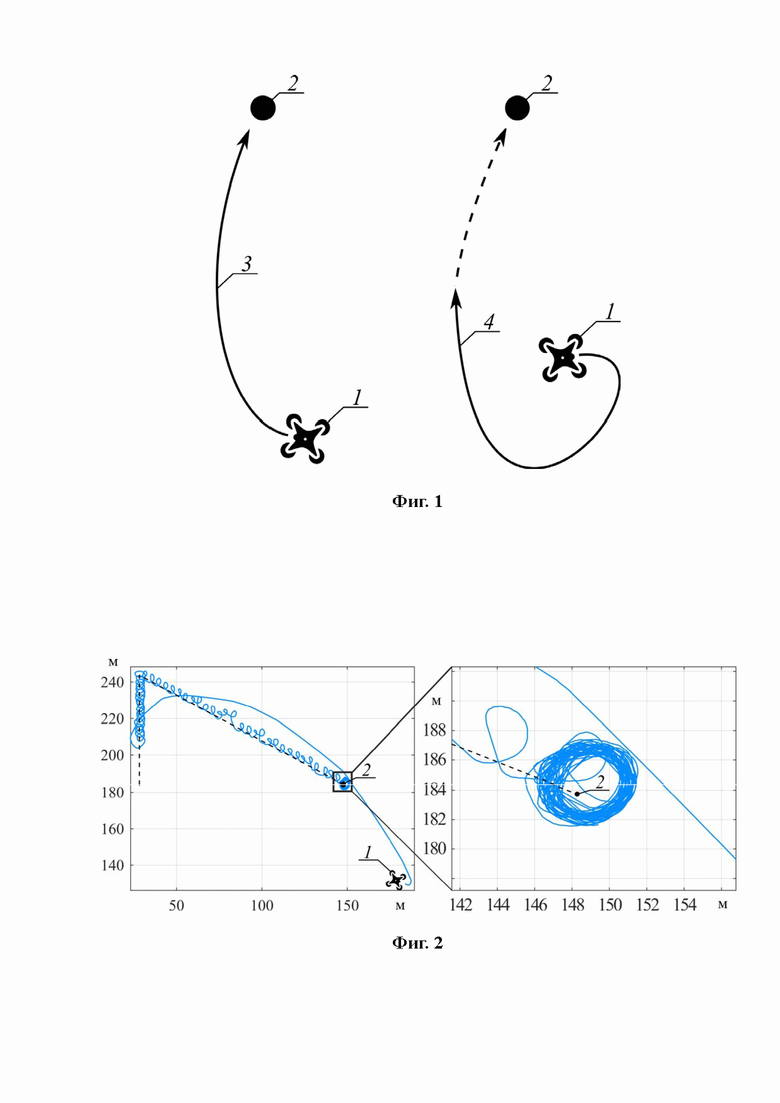
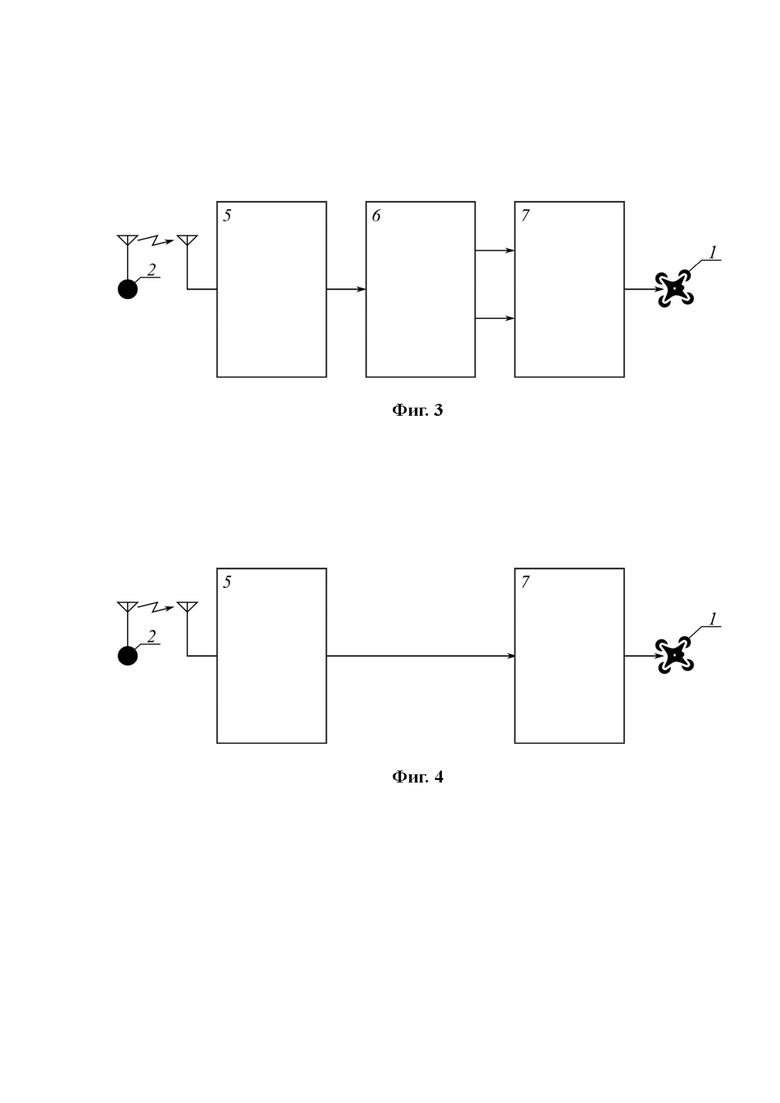
Для пояснения технической сущности способа удержания позиции БПЛА в окрестности заданного объекта на фиг.1 показаны примеры траекторий БПЛА 1 при сокращении дистанции до заданного объекта 2 (траектория 3) и увеличении дистанции до заданного объекта 2 (траектория 4). На фиг.2 представлена траектория движения БПЛА 1 к заданному объекту 2, в случае, когда заданный объект перемещается в пространстве, а также в более крупном масштабе продемонстрирована траектория БПЛА 1 в процессе удержания позиции после остановки заданного объекта 2. Техническая сущность устройства для реализации способа удержания позиции БПЛА в окрестности заданного объекта проиллюстрирована на фиг.3. Предложенное устройство содержит: 5 – приёмник радиосигнала от передатчика, установленного на заданном объекте 2; 6 – блок управления, реализующий предложенный способ удержания позиции беспилотным летательным аппаратом (БПЛА) 1 в окрестности заданного объекта 2; 7 – полётный контроллер, обеспечивающий режимы стабилизации горизонта и удержания заданной высоты БПЛА 1. Фиг.4 иллюстрирует альтернативный вариант реализации устройства для осуществления способа удержания позиции БПЛА в окрестности заданного объекта.
Осуществление изобретения
Работает способ удержания позиции БПЛА в окрестности заданного объекта следующим образом. Способ предполагает, что БПЛА управляется в режиме стабилизации горизонта и удержания заданной высоты, а также в каждый момент времени перемещается с воздушной скоростью, превышающей скорость ветра. В процессе удержания позиции БПЛА монотонно изменяет курсовой угол. Конкретное направление изменения курсового угла значения не имеет, однако оно не должно изменяться в процессе удержания позиции БПЛА с использованием предлагаемого способа. В случаях, когда дистанция до заданного объекта сокращается или остаётся неизменной, БПЛА снижает скорость монотонного изменения курса, одновременно увеличивая воздушную скорость прямолинейного движения по курсу. В качестве одного из частных случаев реализации предлагаемого способа скорость монотонного изменения курса может быть снижена до нулевой. Это приводит к тому, что траектория БПЛА 1 вытягивается в сторону заданного объекта 2, в окрестности которого необходимо осуществлять удержание позиции (фиг.1, траектория 3). В случаях, когда дистанция до заданного объекта 2 увеличивается, БПЛА 1 повышает скорость монотонного изменения курса, одновременно снижая воздушную скорость прямолинейного движения по курсу. В результате траектория БЛПА 1 принимает форму петли, конец которой направлен в сторону заданного объекта 2 (фиг.1, траектория 4). При этом выход из этой петли произойдёт в тот момент, когда дистанция до заданного объекта 2 начнёт сокращаться или остаётся неизменной.
Предлагаемый способ сохраняет свою работоспособность в случае, если заданный объект 2 движется на скоростях меньших, чем скорость БПЛА 1 относительно земли в направлении против ветра. На фиг.2 представлена траектория движения БПЛА 1 к заданному объекта 2, в случае, когда заданный объект перемещается в пространстве, а также в более крупном масштабе продемонстрирована траектория БПЛА 1 в процессе удержания позиции после остановки заданного объекта 2.
За счёт того, что данный способ не требует численных оценок фактического курса движения БПЛА 1 для формирования управляющих воздействий, он может быть реализован без использования магнитометров, датчиков курса, основанных на использовании глобальных навигационных систем, маяков радионавигации или ультразвуковой навигации, а также систем технического зрения. За счёт того, что данный способ не требует численных оценок дистанции до заданного объекта, оперируя только фактами увеличения или сокращения данной дистанции, а также не требует обеспечения какой-либо конкретной скорости относительно земли, предлагаемый способ может быть реализован без использования каких-либо навигационных систем, дающих оценку пространственного положения аппарата, например, основанных на принципе триангуляции. Вместо этого для оценки дистанции может быть использована любая физическая величина, отражающая факт сокращения или увеличения дистанции до заданного объекта. Например, в качестве такой величины может быть использована мощность радиосигнала единичного передатчика стандарта Lora, установленного на заданный объект. Из уровня техники [Adi P. D. P., Kitagawa A. A Study of LoRa Performance in Monitoring of Patient s SPO2 and Heart Rate based IoT //International Journal of Advanced Computer Science and Applications (IJACSA). – 2020. – Т. 11. – №. 2. – С. 238-251] известно, что данная мощность монотонно уменьшается с увеличением дистанции до передатчика и может измеряться на удалении до 4 км и выше.
Устройство для реализации способа удержания позиции БПЛА в окрестности заданного объекта работает следующим образом. Приёмник 5 принимает радиосигналы от передатчика, установленного на заданный объект 2, и передаёт результаты на блок управления 6, который с использованием одного из известных из уровня техники методов, например, путём комплексного анализа мощности принимаемого радиосигнала с использованием нейронных сетей [Abboud M. et al. Distance estimation using LoRa and neural networks / International Conference on Machine Learning for Networking. – Cham: Springer International Publishing, 2021. – c.148-159] производит оценку дистанции между БПЛА 1 и заданным объектом 2. Затем блок управления 6 дифференцирует полученную оценку дистанции между БПЛА 1 и заданным объектом 2. Для снижения влияния шумов измерения на результаты дифференцирования может быть применён один из известных из уровня техники методов, например, аппроксимация функциональным рядом Тейлора [Романов А.М. Оценка старших производных в контуре цифровой системы управления в условиях шумов / Мехатроника, автоматизация, управление. – 2010. – № 3. – c.25-28]. В случае, если результат дифференцирования отрицательный, делается вывод о сокращении дистанции до заданного объекта 2; если же результат дифференцирования положительный, то делается вывод об увеличении дистанции до заданного объекта 2; а если производная оценки дистанции равна нулю, то делается вывод о том, что дистанция до заданного объекта 2 остаётся неизменной. Далее в соответствии с предложенным способом удержания позиции в окрестности заданного объекта, блок управления 6 формирует задания по управлению скоростью монотонного изменения курса и воздушной скоростью прямолинейного движения по курсу БПЛА 1, которые поступают на соответствующие входы управления полётного контроллера 7. Для реализации предложенного способа удержания позиции в окрестности заданного объекта необходимо, чтобы полётный контроллер 7 обеспечивал управление БПЛА 1 в режиме стабилизации горизонта и удержания заданной высоты.
В альтернативном варианте реализации устройства для осуществления способа удержания позиции БПЛА в окрестности заданного объекта приёмник 5 подключён непосредственно к полётному контроллеру 7 (фиг.4). В этом случае полётный контроллер 7 реализует способ удержания позиции БПЛА в окрестности заданного объекта аналогично тому, как в выше описанном варианте устройства это выполнял блок управления 6, однако полученные в результате осуществления способа целевые значения скорости монотонного изменения курса и воздушной скорости прямолинейного движения по курсу передаются в качестве задающих значений на соответствующие входы аппаратных или программных блоков полётного контроллера, обеспечивающих движение БПЛА с заданной скоростью в режимах стабилизации горизонта и удержания заданной высоты беспилотного летательного аппарата. Фактическая передача задающих значений между различными блоками полётного контроллера может быть реализована любым известным из уровня техники способом, например, при помощи обмена данными через общую память.
Работоспособность изобретения была проверена на двух БПЛА мультроторного типа, каждый из которых был оснащён макетом одного из двух альтернативных варианта устройства для удержания позиции в окрестности заданного объекта беспилотным летальным аппаратом. Совокупность результатов испытаний, проведённых с использованием макетов этих устройств, наглядно продемонстрировала получение требуемого технического результата.
В ходе проведённых экспериментов на местности был установлен передатчик, отмечающий заданный объект, сигнал которого принимал приёмник макета устройства для удержания позиции в окрестности заданного объекта беспилотным летальным аппаратом. В ходе проверки работоспособности изобретения на каждом из БПЛА были выполнены экспериментальные полёты, как в штилевых условиях, так и в условиях ветра 4 м/c. В каждом из экспериментальных полётов БПЛА в ручном режиме выводился на высоту 400 м над точкой установки передатчика и на расстояние более 150 м от него, после чего БПЛА переводился в режим управления макетом изобретения. В ходе экспериментов, использовались БПЛА, не оснащённые магнитометром, приёмо-передатчиками стандарта UWB и маяками на их основе, ультразвуковой навигацией, лазерными дальномерами или видеокамерами. В процессе выполнения полётов положение БПЛА фиксировалось при помощи приёмников спутниковой навигации GPS/ГЛОНАСС, установленных на каждом из аппаратов, однако данные приёмники использовались только для целей независимой регистрации данных в процессе экспериментов и не использовались в процессе управления БПЛА. Во всех случаях, вне зависимости от используемого варианта устройства, после передачи управления БПЛА макету устройства он начинал совершать круговые манёвры на высоте 400 м, смещаясь в сторону места установки передатчика. После приближения к месту установки передатчика на расстояние менее 20 м БПЛА начинал совершать в его окрестности круговые движения на высоте 400 м. Максимальное удаление по горизонтали от точки установки передатчика в процессе этих круговых движений в штилевых условиях не превышало 75 м, а в условиях ветра – 150 м. Таким образом, благодаря использованию каждого из альтернативных вариантов устройства в ходе экспериментов было обеспечено удержание позиции БПЛА в окрестности заданного объекта на удалении от него не более 150 м по горизонтали в условиях ветра на высоте более 200 м над заданным объектом без использования сигналов глобальных спутниковых навигационных систем, показаний магнитометров, маяков стандарта UWB и ультразвуковой навигации, лазерных дальномеров, а также видеокамер и основанных на них систем технического зрения, что говорит о достижении указанного технический результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2830721C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2024 |
|
RU2836773C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2022 |
|
RU2773981C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
Группа изобретений относится к способу удержания позиции беспилотным летальным аппаратом в окрестности заданного объекта и двум вариантам устройства для его осуществления. Для удержания позиции в режиме стабилизации горизонта перемещают беспилотный летательный аппарат с воздушной скоростью, превышающей скорость ветра, снижают скорость монотонного изменения курса, одновременно увеличивая воздушную скорость прямолинейного движения по курсу, если дистанция до заданного объекта сокращается или остается неизменной, и наоборот, если увеличивается. Оба устройства содержат приёмник радиосигнала от передатчика, установленного на заданном объекте, полетный контроллер. Устройство по второму варианту дополнительно содержит блок управления, подключенный к приемнику радиосигнала и полетному контроллеру. Обеспечивается удержание позиции беспилотным летательным аппаратом без использования бортовых навигационных приборов и датчиков определения расстояния. 3 н.п. ф-лы, 4 ил.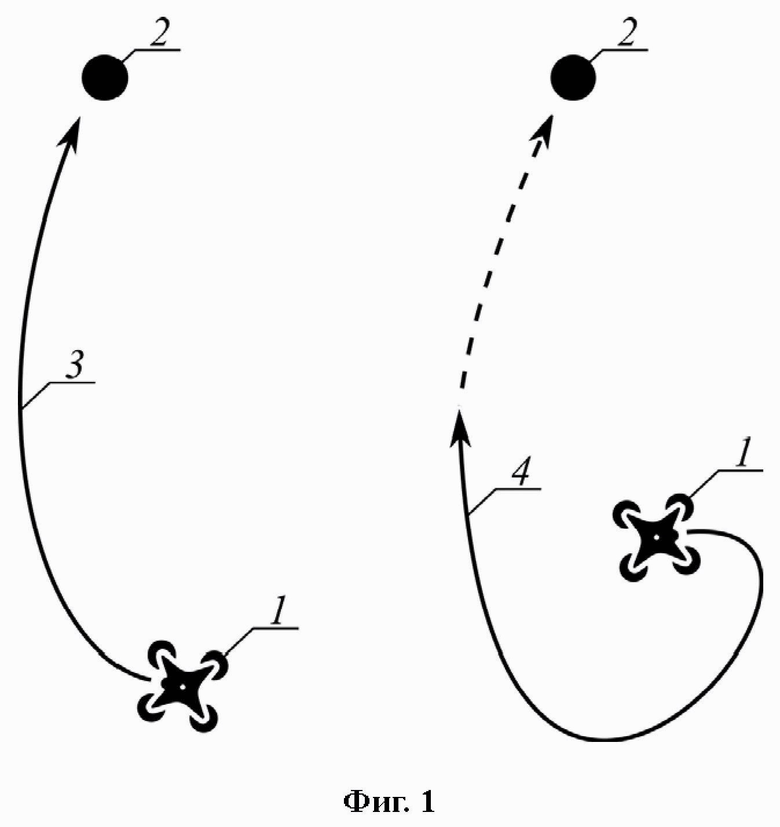
1. Способ удержания позиции беспилотным летальным аппаратом в окрестности заданного объекта, характеризующийся тем, что в режиме стабилизации горизонта и удержания заданной высоты беспилотный летательный аппарат перемещается с воздушной скоростью, превышающей скорость ветра, при этом в случаях, когда дистанция до заданного объекта сокращается или остаётся неизменной, снижает скорость монотонного изменения курса, одновременно увеличивая воздушную скорость прямолинейного движения по курсу, а в случаях, когда дистанция до заданного объекта увеличивается, повышает скорость монотонного изменения курса, одновременно снижая воздушную скорость прямолинейного движения по курсу.
2. Устройство для удержания позиции беспилотным летальным аппаратом в окрестности заданного объекта, характеризующееся тем, что содержит приёмник радиосигнала от передатчика, установленного на заданном объекте, при этом указанный приёмник подключён к блоку управления, реализующему способ удержания позиции беспилотным летальным аппаратом в окрестности заданного объекта по п.1, выходы которого подключены к входам управления скоростью монотонного изменения курса и воздушной скоростью прямолинейного движения по курсу полётного контроллера, обеспечивающего режимы стабилизации горизонта и удержания заданной высоты беспилотного летательного аппарата.
3. Устройство для удержания позиции беспилотным летальным аппаратом в окрестности заданного объекта, характеризующееся тем, что содержит приёмник радиосигнала от передатчика, установленного на заданном объекте, подключенный к полётному контроллеру, обеспечивающему режимы стабилизации горизонта и удержания заданной высоты беспилотного летательного аппарата, а также реализующему способ удержания позиции беспилотным летальным аппаратом в окрестности заданного объекта по п.1 и использующему полученные в результате этого целевые значения скорости монотонного изменения курса и воздушной скорости прямолинейного движения по курсу в качестве задающих значений для управления скоростью монотонного изменения курса и воздушной скоростью прямолинейного движения по курсу беспилотного летательного аппарата.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СПОСОБ УПРАВЛЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2103713C1 |
| WO 2016006588 A1, 14.01.2016 | |||
| WO 2018086140 A1, 17.05.2018 | |||
| US 10276051 B2, 30.04.2019. | |||

