Область техники
Настоящее изобретение относится к базовой станции, роботизированной системе чистки и способу ее управления, в частности к роботизированной системе чистки, способной автоматически заменять обтирочный материал.
Уровень техники
С развитием науки и технологий и постоянным стремлением людей к повышению качества жизни, бытовые роботы-уборщики, включая, но не ограничиваясь этим, подметальную машину, поломоечную машину, машину для мытья окон, пользуются все большей популярностью среди пользователем в связи с тем, что они способны помочь людям освободиться от тяжелой домашней работы.
Робот-уборщик, как правило, использует обтирочный материал (например, салфетку, обтирочный материал и др.) для выполнения операции уборки. При движении по заданному маршруту робот-уборщик приводит обтирочный материал в перемещение по рабочей поверхности (например, полу или стеклу) для выполнения операции уборки. По мере продолжения уборки пятна на обтирочном материале неизбежно увеличиваются, а эффект уборки ухудшается. По этой причине необходимо снимать грязный обтирочный материал и заменить чистым.
Известен робот-уборщик, на котором обычно заменяют обтирочный материал вручную, пользователь должен постоянно уделять внимание процессу уборки и заменять грязный обтирочный материал своевременно. Такой способ требует участия пользователей и замены обтирочного материала вручную, и пользователь склонен пачкать руки во время замены обтирочного материала, следовательно, получают плохой пользовательский опыт.
Сущность изобретения
Для преодоления недостатков известных технологий задачей настоящего изобретения является предоставление робота-уборщика, способного автоматически заменять обтирочный материал в ходе нормальной работы без вмешательства пользователя.
Одним из технических решений, применяемых в настоящем изобретении для решения существующих технических проблем, является:
Базовая станция для парковки робота-уборщика, при этом упомянутый робот-уборщик включает в себя обтирочную платформу, к которой прикреплен гибкий обтирочный материал с возможностью замены для образования обтирочной поверхности, чтобы протереть рабочую поверхность, по которой ходит упомянутый робот-уборщик; упомянутая базовая станция включает в себя: модуль хранения, предназначенный для хранения непрерывных основных обтирочных материалов; модуль подачи, перемещающий свободный конец упомянутого основного обтирочного материала до места отрывания, чтобы упомянутый свободный конец оторвался от упомянутого основного обтирочного материала, образуя при этом упомянутый обтирочный материал.
Другим техническим решением, применяемым в настоящем изобретении для решения существующих технических проблем, является:
Способ управления роботизированной системой чистки, при этом упомянутая роботизированная система чистки включает в себя робот-уборщик и базовую станцию для парковки упомянутого робота-уборщика, а упомянутый робот-уборщик включает в себя обтирочную платформу, предназначенную для прикрепления гибкого обтирочного материала с возможностью замены для образования обтирочной поверхности, чтобы протереть рабочую поверхность; отличающийся тем, что упомянутый способ включает в себя:
перемещение свободного конца непрерывного основного обтирочного материала до места отрывания;
отрывание упомянутого свободного конца от упомянутого основного обтирочного материала для образования обтирочного материала;
установку упомянутого обтирочного материала на упомянутой обтирочной платформе.
В одном возможном варианте упомянутый способ управления также включает в себя: отсоединение упомянутого обтирочного материала от упомянутой обтирочной платформы.
В одном возможном варианте упомянутый способ управления также включает в себя: отсоединение упомянутой обтирочной платформы от упомянутого робота-уборщика, прежде чем отсоединить упомянутый обтирочный материал от упомянутой обтирочной платформы.
В одном возможном варианте упомянутый способ управления также включает в себя: приведение упомянутой обтирочной платформы, отсоединенной от робота-уборщика, в перемещение на рабочую позицию обтирочного материала, прежде чем отсоединить упомянутый обтирочный материал от упомянутой обтирочной платформы.
В одном возможном варианте упомянутый способ управления также включает в себя: установку упомянутой обтирочной платформы на упомянутом роботе-уборщике после установки упомянутого обтирочного материала на упомянутой обтирочной платформе.
В одном возможном варианте упомянутый способ управления также включает в себя: перемещение упомянутого робота-уборщика по первому направлению на заранее установленное расстояние после отсоединения упомянутой обтирочной платформы от упомянутого робота-уборщика.
В одном возможном варианте упомянутый способ управления также включает в себя: установку упомянутой обтирочной платформы на упомянутом роботе-уборщике после перемещения упомянутого робота-уборщика по первому направлению на заранее установленное расстояние.
В одном возможном варианте после установки упомянутого обтирочного материала на упомянутой обтирочной платформе упомянутый робот-уборщик перемещается по второму направлению на заранее установленное расстояние, установить упомянутую обтирочную платформу на упомянутом роботе-уборщике, упомянутое первое направление противоположно упомянутому второму направлению.
Другим техническим решением, применяемым в настоящем изобретении для решения существующих технических проблем, является:
Роботизированная система чистки, включающая в себя робот-уборщик и базовую станцию для парковки упомянутого робота-уборщика, при этом упомянутый робот-уборщик включает в себя: корпус; передвижной модуль, установленный на упомянутом корпусе и приводящий робот-уборщик в перемещение по рабочей поверхности; обтирочную платформу, установленную на упомянутом корпусе и предназначенную для прикрепления гибкого обтирочного материала с возможностью отсоединения для образования обтирочной поверхности, чтобы протереть рабочую поверхность; упомянутая обтирочная платформа включает в себя загрузочную часть, предназначенную для закрепления упомянутого обтирочного материала; упомянутая базовая станция включает в себя: модуль хранения, предназначенный для хранения основного обтирочного материала; модуль подачи, перемещающий свободный конец упомянутого основного обтирочного материала до места отрывания, чтобы упомянутый свободный конец оторвался от упомянутого основного обтирочного материала для образования упомянутого обтирочного материала; рабочий модуль; установленный на упомянутом корпусе или упомянутой базовой станции и воздействующий на упомянутую обтирочную платформу и/или обтирочный материал, чтобы упомянутый обтирочный материал соединился с загрузочной частью упомянутой обтирочной платформы
В одном возможном варианте базовая станция включает в себя рабочую позицию обтирочного материала, использованную для приема обтирочного материала, предназначенного для установки на обтирочной платформе.
В одном возможном варианте место отрывания расположено на рабочей позиции обтирочного материала, или между модулем подачи и рабочей позицией обтирочного материала.
В одном возможном варианте базовая станция включает в себя модуль отрывания, воздействующий на упомянутый основной обтирочный материал между модулем хранения и местом отрывания, и отрывающий свободный конец от основного обтирочного материала для образования обтирочного материала.
В одном возможном варианте свободный конец, по крайней мере, основанный на основном обтирочном материале, достигает до места отрывания, модуль подачи закрепляет основной обтирочный материал, по крайней мере, на одной стороне места слабого соединения основного обтирочного материала, чтобы свободный конец оторвался от основного обтирочного материала за счет растяжения в месте слабого соединения.
В одном возможном варианте модуль подачи прерывисто захватывает основной обтирочный материал.
В одном возможном варианте модуль подачи включает в себя передаточное колесо, внешний контур которого включает в себя, по крайней мере, две кривизны, чтобы поверхность передаточного колеса прерывисто коснулась основного обтирочного материала.
В одном возможном варианте модуль подачи, по крайней мере, частично выше рабочей позиции обтирочного материала, чтобы свободный конец основного обтирочного материала переместился до рабочей позиции обтирочного материала, по крайней мере, частично под действием силы тяжести.
В одном возможном варианте рабочая позиция обтирочного материала простирается в приблизительно вертикальном направлении, чтобы обтирочный материал растянулся под действием силы тяжести.
В одном возможном варианте базовая станция включает в себя ограничительное устройство, предназначенное для контроля местоположения обтирочного материала, чтобы модуль подачи переместил упомянутый обтирочный материал до рабочей позиции обтирочного материала.
В одном возможном варианте основной обтирочный материал намотается на вращающийся вал, модуль хранения включает в себя монтажную стойку, которая взаимодействует с вращающимся валом, чтобы вращающийся вал установился на базовой станции.
В одном возможном варианте монтажная стойка включает в себя первое состояние для обеспечения монтажа вращающегося вала и второе состояние для обеспечения демонтажа вращающегося вала.
В одном возможном варианте базовая станция включает в себя рабочий модуль, воздействующий на обтирочный материал и/или обтирочную платформу, чтобы обтирочный материал соединился с загрузочной частью обтирочной платформы.
В одном возможном варианте рабочий модуль воздействует на обтирочный материал и/или обтирочную платформу, чтобы обтирочный материал отсоединился от загрузочной части обтирочной платформы.
В одном возможном варианте рабочий модуль установлен съемным образом на базовой станции.
В одном возможном варианте базовая станция включает в себя рабочую позицию обтирочной платформы, предназначенную для монтажа или отсоединения обтирочной платформы от робота-уборщика.
В одном возможном варианте рабочая позиция обтирочного материала выше рабочей позиции обтирочной платформы, чтобы образовать пространство для парковки робота-уборщика.
В одном возможном варианте базовая станция включает в себя приводной модуль, приводящий обтирочную платформу в перемещение между рабочей позицией обтирочной платформы и рабочей позицией обтирочного материала.
В одном возможном варианте рабочая позиция обтирочного материала включает в себя монтажную позицию обтирочного материала и разделительную позицию обтирочного материала, чтобы отсоединить или установить обтирочный материал на обтирочной платформе, а приводной модуль приводит обтирочную платформу в перемещение и/или во вращение в приблизительно горизонтальном направлении, чтобы обтирочная платформа переместилась до монтажной позиции обтирочного материала или до разделительной позиции обтирочного материала.
В одном возможном варианте базовая станция включает в себя принимающий модуль, предназначенный для приема обтирочного материала, отсоединенного от обтирочной платформы.
В одном возможном варианте упомянутая базовая станция включает в себя разделительный модуль, воздействующий на обтирочный материал и/или обтирочную платформу, чтобы обтирочный материал отсоединился от загрузочной части обтирочной платформы.
В одном возможном варианте принимающий модуль расположен в направлении перемещения обтирочной платформы, чтобы обтирочный модуль, перемещаясь до разделительного модуля, сжимал обтирочный материал в принимающем модуле.
В одном возможном варианте, по крайней мере, в одном состоянии, отверстие принимающего модуля для приема обтирочного материала, по крайней мере, частично ниже, чем упомянутая рабочая позиция обтирочного материала, чтобы обтирочный материал извлекался в принимающий модуль, по крайней мере, частично под действием силы тяжести.
В одном возможном варианте принимающий модуль установлен съемным образом на базовой станции.
В одном возможном варианте на базовой станции и роботе-уборщике установлены блоки связи соответственно, за счет связи между базовой станцией и роботом-уборщиком базовая станция взаимодействует с роботом-уборщиком для замены обтирочного материала.
В одном возможном варианте базовая станция включает в себя блок зарядки, чтобы зарядить робот-уборщик, когда он стыкован с упомянутой базовой станцией.
По сравнению с предшествующим уровнем техники настоящее изобретение имеет следующие положительные эффекты: за счет того, что базовая станция непрерывно выдает основной обтирочный материал и отрывает свободный конец выданного основного обтирочного материала для образования обтирочного материала, чтобы установить его на обтирочной платформе, робот-уборщик сможет осуществить полностью автоматическую замену обтирочного материала на базовой станции. На основе того, что известный робот-уборщик автоматически возвращается на базовую станцию на зарядку, робот-уборщик, представленный по настоящему варианту, автоматически возвращается на базовую станцию для замены обтирочного материала. По сравнению с традиционным роботом-уборщиком, после вытирания поверхности робот-уборщик не только не требует от пользователя замены обтирочного материала, но и большого вмешательства пользователя в работе базовой станции и робота-уборщика, пользователю нужно только установить непрерывный основной обтирочный материал на базовой станции и выбросить использованный обтирочный материал, отсоединенный от робота-уборщика.
Описание чертежей
Вышеуказанные задачи, технические решения и положительные эффекты настоящего изобретения могут осуществляться с помощью следующих чертежей:
Фиг. 1-3 - схематические конструктивные виды первого возможного варианта системы чистки согласно первому примеру осуществления настоящего изобретения;
Фиг. 4 - схематический конструктивный вид модуля очистки, установленного на роботе-уборщике, включенном в состав системы чистки, изображенной на фиг. 1-3;
Фиг. 5 - вид сверху модуля очистки в одном рабочем состоянии, изображенного на фиг. 4;
Фиг. 6 - вид сбоку модуля очистки, изображенного на фиг. 5;
Фиг. 7-8 - частичные схематические конструктивные виды системы чистки согласно первому примеру осуществления настоящего изобретения;
Фиг. 9 - схематический конструктивный вид первого возможного варианта базовой станции;
Фиг. 10 - схематический конструктивный вид второго возможного варианта базовой станции;
Фиг. 11-12 - схематические конструктивные виды третьего возможного варианта базовой станции;
Фиг. 13 - схематический конструктивный вид четвертого возможного варианта базовой станции;
Фиг. 14 - схематический конструктивный вид одного возможного варианта основного обтирочного материала 500, установленного на базовой станции;
Фиг. 15 - схематический конструктивный вид пятого возможного варианта базовой станции;
Фиг. 16 - схематический конструктивный вид шестого возможного варианта базовой станции;
Фиг. 17 - схематический конструктивный вид седьмого возможного варианта базовой станции;
Фиг. 18 - схематический конструктивный вид восьмого возможного варианта базовой станции;
Фиг. 19 - схематический конструктивный вид девятого возможного варианта базовой станции;
Фиг. 20 - схематический конструктивный вид десятого возможного варианта базовой станции;
Фиг. 21 - схематический конструктивный вид одиннадцатого возможного варианта базовой станции;
Рис. 22 - детальный чертеж части базовой станции согласно примеру осуществления настоящего изобретения, изображенному на фиг. 21;
Фиг. 23 - схематический конструктивный вид двенадцатого возможного варианта базовой станции;
Фиг. 24-26 - схематические конструктивные виды второго возможного варианта системы чистки согласно первому примеру осуществления настоящего изобретения;
Фиг. 27-29 - схематические конструктивные виды третьего возможного варианта системы чистки согласно первому примеру осуществления настоящего изобретения;
Фиг. 30-31 - частичные схематические конструктивные виды тринадцатого возможного варианта базовой станции;
Фиг. 32 - схематический конструктивный вид четвертого возможного варианта системы чистки согласно первому примеру осуществления настоящего изобретения;
Фиг. 33 - схематический конструктивный вид пятого возможного варианта системы чистки согласно первому примеру осуществления настоящего изобретения;
Фиг. 34-35 - частичные схематические конструктивные виды тринадцатого возможного варианта базовой станции;
Фиг. 36 - схематический конструктивный вид сверху шестого возможного варианта системы чистки согласно первому примеру осуществления настоящего изобретения;
Фиг. 37A-37L - схема процесса замены обтирочного материала робота-уборщика в первом возможном варианте базовой станции согласно второму примеру осуществления настоящего изобретения;
Фиг. 38A и фиг. 38B - схематические конструктивные виды поддона обтирочной платформы в развернутом состоянии и в сложенном состоянии соответственно;
Фиг. 39A и фиг. 39B - схематические конструктивные виды загрузочной части в зажатом состоянии и в открытом состоянии соответственно;
Фиг. 40 - схематический конструктивный вид сборки рабочего модуля и модуля очистки с разнесенными деталями;
Фиг. 41A-43A - схема процесса установки рабочим модулем обтирочного материала на модуле очистки;
Фиг. 41B-43B - виды сбоку фиг. 41A-43A соответственно;
Фиг. 41C-43C - виды в разрезе фиг. 41A-43A соответственно;
Фиг. 44A-44I - схема процесса замены обтирочного материала робота-уборщика во втором возможном варианте базовой станции согласно второму примеру осуществления настоящего изобретения;
Фиг. 45 - схематический конструктивный вид механизма перемещения и изменения положения, указанного на фиг. 44A-44I;
Фиг. 46A-46L - схема процесса замены обтирочного материала робота-уборщика в третьем возможном варианте базовой станции согласно второму примеру осуществления настоящего изобретения;
Фиг. 47 - схематический конструктивный вид первого возможного варианта системы чистки согласно третьему примеру осуществления настоящего изобретения;
Фиг. 48 - схематический конструктивный вид механизма сбора обтирочного материала, указанного на фиг. 47;
Фиг. 49 - схематический конструктивный вид базовой станции второго возможного варианта системы чистки согласно третьему примеру осуществления настоящего изобретения;
Фиг. 50 - схематический конструктивный вид базовой станции с разнесенными деталями, указанной на фиг. 49;
Фиг. 51 - схематический конструктивный вид пространственного строения базовой станции согласно четвертому примеру осуществления настоящего изобретения;
Фиг. 52 - схематический конструктивный вид робота-уборщика, расположенного на базовой станции, указанной на фиг. 51;
Фиг. 53 - схематический конструктивный вид захватного механизма;
Фиг. 54 - схематический конструктивный вид базовой станции при нахождении захватного механизма в первом рабочем состоянии;
Фиг. 55 - схематический конструктивный вид базовой станции при нахождении захватного механизма во втором рабочем состоянии;
Фиг. 56 - схематический конструктивный вид базовой станции при нахождении захватного механизма в третьем рабочем состоянии;
Фиг. 57 - схематический конструктивный вид базовой станции согласно пятому примеру осуществления настоящего изобретения;
Фиг. 58 - схематический конструктивный вид основного ремня, указанного на фиг. 57;
Фиг. 59 - схематический конструктивный вид первого рулона, второго рулона и основного ремня, указанных на фиг. 57;
Фиг. 60 - схематический конструктивный вид, когда робот-уборщик готов войти на базовую станцию;
Фиг. 61 - схематический конструктивный вид основного ремня на рабочей позиции обтирочного материала в состоянии, указанном на фиг. 60;
Фиг. 62 - схематический вид конструкции, в которой очистительный материал, снятый с робота-уборщика, находится на основном ремне;
Фиг. 63 - схематический вид конструкции, в которой основной ремень перемещает новый очистительный материал на рабочую позицию обтирочного материала.
Варианты осуществления изобретения
Благодаря техническим решениям, предложенным в примерах осуществления настоящего изобретения, робот-уборщик может осуществить автоматическую замену обтирочного материала без вмешательства пользователя в процессе замены, что проявляет повышенный уровень автоматизации и интеллектуализации процесса замены обтирочного материала и улучшает пользовательский опыт.
Как показано на фиг. 1-63, система автоматической чистки 300 включает в себя робот-уборщик 100 и базовую станцию 200. Робот-уборщик 100 включает в себя корпус 101 и обтирочную платформу (122, 1201), установленную на корпусе 101, гибкий обтирочный материал прикреплен к обтирочной платформе (122, 1201), образуя при этом обтирочную поверхность, чтобы обтирочная поверхность смогла воздействовать на рабочую поверхность для выполнения вытирания, когда робот-уборщик 100 перемещается по рабочей поверхности.
В одном возможном варианте, как показано на фиг. 1 и фиг. 14, базовая станция 200 включает в себя модуль хранения (213, 520), предназначенный для хранения основного обтирочного материала 500. Базовая станция 200 включает в себя модуль подачи (220, 421), модуль подачи (220, 421) перемещает свободный конец основного обтирочного материала 500 до места отрывания, чтобы свободный конец оторвался от основного блока основного обтирочного материала 500, образуя при этом обтирочный материал.
В одном возможном варианте длина и ширина обтирочного материала зависят от длины и ширины обтирочной платформы (122, 1201), как правило, длина и ширина обтирочного материала больше обтирочной платформы (122, 1201). Обтирочный материал получается в результате отрывания свободного конца основного обтирочного материала 500 от основного блока основного обтирочного материала 500. Выборочно, как показано на фиг. 19, основной обтирочный материал 500 состоит из множества соединенных друг с другом обтирочных материалов стандартной длины, прочность соединения между обтирочными материалами мала, к примеру: между обтирочными материалами предусмотрено множество отверстий с интервалом между собой, таким образом между обтирочными материалами существует место слабого соединения с малой прочностью соединения, а когда место слабого соединения растягивается под действием усилия с двух сторон обтирочный материал может оторваться от основного обтирочного материала 500. Выборочно, как показано на фиг. 23, основной обтирочный материал 500 может состоять из гибких материалов, которые по длине намного больше обтирочного материала, причем между гибкими материалами не предусмотрено место слабого соединения. После установки основного обтирочного материала 500 на базовой станции 200, с помощью модуля отрывания 280 на базовой станции 200 можно оторвать свободный конец основного обтирочного материала 500 от основного блока основного обтирочного материала 500, образуя при этом обтирочный материал.
В одном возможном варианте, как показано на фиг. 14, один конец основного обтирочного материала 500 закреплен на вращающемся валу 510, основной обтирочный материал 500 намотан на вращающийся вал 510 с данным концом в качестве начала. Модуль хранения 520 включает в себя монтажную стойку 51, установленную на базовой станции 200 и сочетающуюся с вращающимся валом 510, на который намотан основной обтирочный материал 500, чтобы можно установить вращающийся вал 510 на монтажной стойке 51. Выборочно, вращающийся вал 510 может вращаться относительно монтажной стойки 51, когда свободный конец основного обтирочного материала 500 подвергают усилиям под воздействием модуля подачи (220, 421), основной обтирочный материал 500 приводит вращающийся вал 510 во вращение относительно монтажной стойки 51, перемещая при этом свободный конец основного обтирочного материала 500 вдаль. Выборочно, вращающийся вал 510 установлен на монтажной стойке 51 и закреплен относительно монтажной стойки 51, часть монтажной стойки 51, соединенная с вращающимся валом 510, может вращаться под действием модуля подачи (220, 421), приводя во вращение вращающийся вал 510 и перемещая при этом свободный конец основного обтирочного материала 500 вдаль. В данном варианте модуль подачи (220, 421) включает в себя электродвигатель, приводящий во вращение монтажную стойку 51.
В одном возможном варианте монтажная стойка 51 включает в себя первое состояние и второе состояние, когда монтажная стойка 51 находится в первом состоянии, она может поддержать вращающийся вал 510 в монтажном состоянии, предотвращая его отсоединение от монтажной стойки 51; при необходимости установки или снятия вращающегося вала 510, монтажная стойка 51 находится во втором состоянии, чтобы вращающийся вал 510 смог отсоединиться от монтажной стойки 51. Выборочно, монтажная стойка 51 включает первую стойку и вторую стойку, которые установлены противоположно и взаимодействуют с левым концом и правым концом вращающегося вала 510 соответственно, когда монтажная стойка 51 находится в первом состоянии, относительное расстояние от первой стойки до второй стойки небольшое; а когда монтажная стойка 51 находится во втором состоянии, относительное расстояние от первой стойки до второй стойки большое. В одном возможном варианте первое состояние монтажной стойки 51 представляет собой состояние, при котором она установлена на базовой станции, а второе состояние - снятое состояние, когда монтажная стойка 51 находится в снятом состоянии можно установить вращающийся вал 510 на монтажной стойке 51, или снять вращающийся вал 510 из монтажной стойки 51.
Базовая станция 200 включает в себя рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, где обтирочная платформа (122, 1201) устанавливает или отсоединяет обтирочный материал. В одном возможном варианте место отрывания включает в себя рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала. Как показано на фиг. 46I, модуль подачи (220, 421) перемещает свободный конец основного обтирочного материала 500 на рабочую позицию 420 обтирочного материала и закрепляет основной обтирочный материал 500 на стороне места слабого соединения. В процессе установки основного обтирочного материала 500 на обтирочной платформе (122, 1201) растягиваются свободный конец основного обтирочного материала 500 и основной блок основного обтирочного материала 500, таким образом, основной блок основного обтирочного материала 500, расположенный на стороне места слабого соединения основного обтирочного материала 500, отрывает от себя свободный конец основного обтирочного материала 500, расположенный на другой стороне основного обтирочного материала 500, образуя при этом обтирочный материал. Выборочно, после того как свободный конец основного обтирочного материала 500 достигает рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420), робот-уборщик 100 устанавливает свободный конец основного обтирочного материала 500 на обтирочной платформе (122, 1201), а когда робот-уборщик 100 перемещается, свободный конец основного обтирочного материала 500 растягивается вместе с обтирочной платформой (122, 1201) и основным блоком основного обтирочного материала 500, и отрывается от основного обтирочного материала 500.
В одном возможном варианте, как показано на фиг. 46I, модуль подачи (220, 421) перемещает свободный конец основного обтирочного материала 500 на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, затем перестает перемещать. После закрепления свободного конца основного обтирочного материала 500 на монтажной позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, модуль подачи (220, 421) растягивает основной обтирочный материал 500 в обратную сторону, таким образом, основной блок основного обтирочного материала 500, расположенный на стороне места слабого соединения основного обтирочного материала 500, отрывает от себя свободный конец основного обтирочного материала 500, расположенный на другой стороне основного обтирочного материала 500, образуя при этом обтирочный материал.
В одном возможном варианте, как показано на фиг. 1, базовая станция 200 включает в себя модуль отрывания 280, воздействующий на основной обтирочный материал 500 для его отрывания. Выборочно, модуль отрывания 280 может включать в себя такие устройства, как металлическое лезвие или пластиковое лезвие, которые создают усилие на основной обтирочный материал 500 для его разделения. Модуль подачи (220, 421) перемещает свободный конец основного обтирочного материала 500 до рабочей позиции, затем перестает его перемещение на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала. После закрепления свободного конца основного обтирочного материала 500 и основного блока основного обтирочного материала 500 на рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, модуль отрывания 280 воздействует на основной обтирочный материал 500 для осуществления отрывания, образуя при этом обтирочный материал. Выборочно, модуль отрывания 280 может включать в себя лазерный нож и другие устройства для осуществления его разделения, не создавая при этом усилие на основной обтирочный материал 500. Модуль подачи (220, 421) перемещает свободный конец основного обтирочного материала 500 до рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, затем перестает его перемещение. После прекращения перемещения основного обтирочного материала 500, модуль отрывания 280 отрывает свободный конец основного обтирочного материала 500 от основного блока основного обтирочного материала 500.
В одном возможном варианте место отрывания включает в себя центральное место между модулем подачи (220, 421) и рабочей позицией обтирочного материала, до того как модуль подачи (220, 421) перемещает свободный конец основного обтирочного материала 500 на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, сначала оторвать свободный конец основного обтирочного материала 500 от основного блока основного обтирочного материала 500 для образования обтирочного материала, далее модуль подачи (220, 421) перемещает обтирочный материал на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала.
В одном возможном варианте модуль подачи (220, 421) включает в себя передаточное колесо (2041, 278), выборочно, два передаточных колеса (2041, 278) захватывают друг друга, перемещая в процессе вращения захваченный основной обтирочный материал 500 наружу. Поскольку основной обтирочный материал 500 гибкий, если в основном обтирочном материале 500 существуют складки, которые не могут быть развернуты во время вращения передаточного колеса (2041, 278) с постоянно захваченным основным обтирочным материалом 500, то обтирочный материал, образованный после отрывания свободного конца основного обтирочного материала 500, имеет определенные складки, в результате чего обтирочный материал не может быть установлен на обтирочной платформе в прямом и разложенном состоянии. Ввиду этого передаточное колесо (2041, 278) прерывисто захватывает основной обтирочный материал 500, чтобы основной обтирочный материал 500 прерывисто не подвергают усилиям во время движения, развертывается естественным образом. Выборочно, внешний контур передаточного колеса (2041, 278) включает в себя, по крайней мере, две крутизны, например, эллипс, чтобы передаточное колесо (2041, 278) сжималось и отделялось во время вращения. Выборочно, передаточное колесо (2041, 278) прерывисто отделяется автоматически, чтобы передаточное колесо (2041, 278) отделялось от другой поверхности, соприкасающейся с ним. Выборочно, для того чтобы предотвратить падение свободного конца основного обтирочного материала 500 во время отделения модуля подачи (220, 421), можно установить демпфер в модуле хранения (213, 520), или установить демпфер в передаточном колесе (2041, 278) и т.п.
В одном возможном варианте, как показано на фиг. 1 и фиг. 37, модуль подачи (220, 421), по крайней мере, частично выше, чем рабочая позиция обтирочного материала, поскольку модуль подачи (220, 421) перемещает свободный конец основного обтирочного материала 500 на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, когда модуль подачи (220, 421) выше рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, основной обтирочный материал 500 может частично перемещаться на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала под действием силы тяжести.
В одном возможном варианте, как показано на фиг. 44, рабочая позиция (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала протягивается в приблизительно вертикальном направлении, на основе того, что модуль подачи (220, 421) выше рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, при перемещении модулем подачи (220, 421) основного обтирочного материала 500 наружу основной обтирочный материал 500 сможет развернуться естественным образом на рабочей позиции обтирочного материала под действием силы тяжести, не требуя дополнительных устройств для изменения направления перемещения основного обтирочного материала 500, чтобы соответствовало направлению протягивания рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала.
В одном возможном варианте базовая станция 200 включает в себя ограничительный модуль 260, предназначенный для контроля местоположения обтирочного материала, чтобы обтирочный материал оторвался с приблизительно точной длиной и переместился до приблизительно точного местоположения. Выборочно, ограничительный модуль 260 включает в себя узел датчика 261, предназначенный для контроля контроля края обтирочного материала, узел датчика 261 установлен на краю монтажной позиции обтирочного материала, при обнаружении узлом датчика 261 края обтирочного материала, это означает, что модуль подачи (220, 421) переместил обтирочный материал на рабочую позицию обтирочного материала, то модуль подачи (220, 421) перестает перемещение наружу. Выборочно, узел датчика 261 применяется для контроля знака местоположения обтирочного материала, как показано на фиг. 19, узел датчика 261 установлен на другом краю рабочей позиции обтирочного материала, датчик 261 контролирует знак местоположения, установленный в основном обтирочном материале 500, например отверстия с интервалом между собой, предусмотренные в месте слабого соединения основного обтирочного материала 500, когда узел датчика 261 обнаруживает знак местоположения, это означает, что модуль подачи (220, 421) уже переместил обтирочный материал до рабочей позиции обтирочного материала, в этом случае модуль подачи (220, 421) перестает перемещение наружу.
В одном возможном варианте, как показано на фиг. 4-8, обтирочная платформа (122, 1201) включает в себя загрузочную часть (123, 127), обтирочный материал за счет соединения с загрузочной частью (123, 127) закрепляется на обтирочной платформе (122, 1201). В частности, загрузочная часть (123, 127) может включать в себя конструкцию зажима, захватывающую механическим образом, по крайней мера, часть края обтирочного материала между загрузочной частью (123, 127) и обтирочной платформой (122, 1201), или закрепить, по крайней мера, часть края обтирочного материала на обтирочной платформе (122, 1201) путем вклеивания.
В одном возможном варианте система автоматической чистки 300 включает в себя рабочий модуль (125, 400), рабочий модуль (125, 400) выборочно установлен на корпусе 101 робота-уборщика 100 или установлен на базовой станции 200, можно также, частично установлен на корпусе 101 робота-уборщика 100 и частично установлен на базовой станции 200. Рабочий модуль (125, 400) соответствует рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала на базовой станции 200, когда обтирочная платформа (122, 1201) и обтирочный материал находятся на рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, рабочий модуль (125, 400) может воздействовать на обтирочную платформу (122, 1201) и/или обтирочный материал, установить обтирочный материал на обтирочной платформе (122, 1201), взаимодействуя с загрузочной частью (123, 127) обтирочной платформы (122, 1201). Выборочно, рабочий модуль (125, 400) съемным образом установлен на роботе-уборщике 100 или на базовой станции 200 для удобства проведения ремонта. Выборочно, рабочий модуль (125, 400) может быть использован как для установки обтирочного материала на обтирочной платформе (122, 1201), так и для отделения обтирочного материала от обтирочной платформы (122, 1201). Выборочно, как показано на фиг. 46, рабочий модуль (125, 400) использован только для установки обтирочного материала на обтирочной платформе (122, 1201), базовая станция 200 также включает в себя разделительный модуль 422, который воздействует на обтирочную платформу (122, 1201) и/или обтирочный материал, чтобы обтирочный материал отделился от обтирочной платформы (122, 1201).
В одном возможном варианте, как показано на фиг. 1 и фиг. 51, базовая станция 200 включает в себя принимающий модуль (211, 15, 206, 240), предназначенный для приема основного обтирочного материала, отсоединенного от обтирочной платформы (122, 1201). Выборочно, отверстие в принимающем модуле (211, 15, 206, 240) используется для того, чтобы пользователь положил мешок для хранения обтирочных материалов в принимающий модуль (211, 15, 206, 240), когда мешку для хранения обтирочных материалов не хватает объема, базовая станция 200 может обнаружить это и напоминать пользователю для его замены. Выборочно, принимающий модуль (211, 15, 206, 240) снимается, после снятия пользователем принимающего модуля (211, 15, 206, 240) с базовой станции 200, выбросить обтирочные материалы, хранящиеся в принимающем модуле (211, 15, 206, 240).
В одном возможном варианте, устройство извлечения 270 воздействует на обтирочный материал, отсоединенный от обтирочной платформы (122, 1201), извлекая обтирочный материал в принимающий модуль (211, 15, 206, 240). Конкретный вариант осуществления устройства извлечения 270 описывается в дальнейших примерах осуществления.
В одном возможном варианте, как показано на фиг. 37-43, рабочий модуль 400 установлен на базовой станции 200. В данном примере осуществления, базовая станция 200 включает в себя рабочую позицию (215, 2021, 2022, 2023, 218, 13) обтирочного материала, чтобы робот-уборщик 100 установил или отсоединил от корпуса 101 обтирочную платформу (122, 1201) с обтирочным материалом. Когда робот-уборщик 100 возвращается на базовую станцию 200, робот-уборщик 100 отсоединяет от корпуса 101 обтирочную платформу (122, 1201) с обтирочным материалом. Базовая станция 200 включает в себя приводной модуль (207, 205, 412), который перемещает обтирочную платформу (122, 1201), отсоединенную от корпуса 101, на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, так что рабочий модуль (125, 400) отсоединяет использованный обтирочный материал от обтирочной платформы (122, 1201). Выборочно, рабочая позиция (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала выше рабочей позиции обтирочной платформы, как показано на фиг. 37, между рабочей позицией (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала и рабочей позицией обтирочной платформы формируется пространство для парковки робота-уборщика 100. Такой вариант выполнения может улучшить размеры базовой станции 200 в горизонтальном направлении, чтобы базовая станция 200 имела более компактную конструкцию.
В одном возможном варианте, как показано на фиг. 46, рабочая позиция (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала включает в себя разделительную позицию 4221 обтирочного материала и монтажную позицию 420 обтирочного материала, разделительная позиция обтирочного материала и монтажная позиция 420 обтирочного материала расположены в принципе на одной горизонтальной плоскости, так что приводной модуль (207, 205, 412) может приводить обтирочную платформу в перемещение между разделительной позицией обтирочного материала и монтажной позицией 420 обтирочного материала в горизонтальном направлении.
В одном возможном варианте отверстие в принимающем модуле (211, 15, 206, 240) для приема обтирочного материала, по крайней мере, в одном состоянии ниже рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, в частности, ниже разделительной позиции 217 обтирочного материала. Как показано на фиг. 1, в одном варианте осуществления, робот-уборщик 100 отделяет обтирочный материал на разделительной позиции 217 обтирочного материала, принимающий модуль (211, 15, 206, 240) установлен под разделительной позицией 217 обтирочного материала, так что обтирочный материал может упасть в принимающий модуль (211, 15, 206, 240). В данном варианте обтирочные материалы сжимают друг друга под действием силы собственной тяжести, так что принимающий модуль (211, 15, 206, 240) может принимать больше обтирочных материалов. Как показано на фиг. 37, в одном варианте осуществления, отверстие в принимающем модуле (211, 15, 206, 240) в одном состоянии выше разделительной позиции 217 обтирочного материала, но в другом состоянии ниже разделительной позиции 217 обтирочного материала. В данном способе осуществления, принимающий модуль 211 может перемещаться в направлении высоты, образуя при этом на базовой станции 200 пространство для парковки робота-уборщика 100. Когда робот-уборщик 100 припаркован на базовой станции 200, расстояние от принимающего модуля (211, 15, 206, 240) до нижней поверхности базовой станции 200 больше высоты робота-уборщика 100. Выборочно, принимающий модуль (211, 15, 206, 240) перемещается в направлении высоты под действием приводного модуля (207, 205, 412), то есть приводной модуль (207, 205, 412) приводит в перемещение обтирочную платформу (122, 1201) и принимающий модуль (211, 15, 206, 240) одновременно.
В одном возможном варианте, принимающий модуль 211 расположен в направлении перемещения обтирочной платформы (122, 1201). Как показано на фиг. 46, принимающий модуль (211, 15, 206, 240) включает в себя камеру для извлечения 206, приводной модуль (207, 205, 412) приводит обтирочную платформу (122, 1201) в движение в камеру для извлечения 206, чтобы обтирочный материал на обтирочной платформе (122, 1201) в камере для извлечения 206. Далее, когда приводной модуль (207, 205, 412) приводит обтирочную платформу (122, 1201) в движение в 206, обтирочная платформа (122, 1201) сжимает обтирочные материалы в камере для извлечения 206, чтобы в камере для извлечения 206 поместились больше обтирочных материалов.
В одном возможном варианте способ управления системой автоматической чистки 300 включает в себя следующие шаги:
перемещение свободного конца непрерывного основного обтирочного материала 500 до места отрывания;
отрывание свободного конца основного обтирочного материала 500 от основного обтирочного материала 500 для образования обтирочного материала;
установку обтирочного материала на обтирочной платформе (122, 1201).
При этом можно проводить отрывание свободного конца основного обтирочного материала 500 от основного обтирочного материала 500 и установку обтирочного материала на обтирочной платформе (122, 1201) одновременно, можно также сначала установить обтирочный материал на обтирочной платформе (122, 1201), потом оторвать свободный конец основного обтирочного материала 500 от основного обтирочного материала 500.
В частности, перемещение свободного конца непрерывного основного обтирочного материала 500 до места отрывания, включает в себя: перемещение свободного конца основного обтирочного материала 500, хранящегося в модуле хранения 213, до места отрывания с помощью модуля подачи (220, 421).
Установка обтирочного материала на обтирочной платформе (122, 1201), включает в себя: установку обтирочного материала в загрузочной части (123, 127) обтирочной платформы (122, 1201) с помощью рабочего модуля (125, 400).
Отрывание свободного конца от основного обтирочного материала 500 для образования обтирочного материала, включает в себя: закрепление и/или растяжение упомянутого основного обтирочного материала 500 с помощью модуля подачи (220, 421), отрывание свободного конца от основного обтирочного материала 500 для образования обтирочного материала.
Отрывание свободного конца от основного обтирочного материала 500 для образования обтирочного материала, включает в себя: отрывание свободного конца от упомянутого основного обтирочного материала 500 для образования обтирочного материала с помощью устройства для отрывания 280.
В одном возможном варианте способ управления системой автоматической чистки 300 включает в себя следующие шаги: отсоединение обтирочного материала от обтирочной платформы (122, 1201). После отсоединения обтирочного материала от обтирочной платформы (122, 1201), обтирочная платформа устанавливает новые обтирочные материалы согласно вышеуказанным шагам, осуществляя автоматическую замену обтирочного материала.
В одном возможном варианте способ управления системой автоматической чистки 300 включает в себя следующие шаги: отсоединение обтирочной платформы (122, 1201) от робота-уборщика 100 до отсоединения обтирочного материала от обтирочной платформы (122, 1201). После отсоединения обтирочной платформы (122, 1201) от робота-уборщика 100 базовая станция 200 воздействует только на отсоединенную обтирочную платформу (122, 1201) с обтирочным материалом, чтобы обтирочная платформа заменила обтирочный материал.
В одном возможном варианте, как показано на фиг. 37-43, способ управления системой автоматической чистки 300 включает в себя следующие шаги: приведение упомянутой обтирочной платформы, отсоединенной от робота-уборщика в перемещение до рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, до отсоединения обтирочного материала от обтирочной платформы (122, 1201). В данном способе осуществления отсоединение обтирочной платформы (122, 1201) от робота-уборщика 100 выполняется на рабочей позиции обтирочной платформы, а отсоединение обтирочного материала от обтирочной платформы (122, 1201) выполняется на рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала. Таким образом, после отсоединения обтирочной платформы (122, 1201) от робота-уборщика 100, приводной модуль (207, 205, 412) перемещает обтирочную платформу (122, 1201) из рабочей позиции обтирочной платформы до рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, потом выполняется замена обтирочного материала.
В одном возможном варианте способ управления системой автоматической чистки 300 включает в себя следующие шаги: установку обтирочной платформы (122, 1201) на упомянутом роботе-уборщике 100 после установки обтирочного материала на обтирочной платформе (122, 1201).
В одном возможном варианте способ управления системой автоматической чистки 300 включает в себя следующие шаги: робот-уборщик 100 перемещается по первому направлению на заранее установленное расстояние после отсоединения обтирочной платформы (122, 1201) от робота-уборщика 100. Как показано на фиг. 37-43, поскольку рабочая позиция (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала расположена над рабочей позицией обтирочной платформы, приводной модуль (207, 205, 412) перемещает обтирочный модуль из рабочей позиции обтирочной платформы до рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала после отсоединения обтирочной платформы (122, 1201) от робота-уборщика 100. Если робот-уборщик 100 остановлен на рабочей позиции обтирочной платформы, то корпус 101 робота-уборщика 100 мешает приводному модулю (207, 205, 412) в перемещении платформы швабры (122, 1201) по вертикальному направлению. Таким образом, робот-уборщик 100 перемещается по первому направлению, предпочтительное первое направление представляет собой направление, обратное направлению перемещения робота-уборщика 100, освобождая пространство для обеспечения перемещения платформы швабры (122, 1201).
В одном возможном варианте способ управления системой автоматической чистки 300 включает в себя следующие шаги: как показано на фиг. 44, установку обтирочной платформы (122, 1201) на упомянутом роботе-уборщике 100 после перемещения робота-уборщика 100 по первому направлению на заранее установленное расстояние. В данном способе осуществления, базовая станция 200 включает в себя монтажную позицию 2022 обтирочной платформы и разделительную позицию 2021 обтирочной платформы, после того, как робот-уборщик 100 отсоединяет обтирочную платформу (122, 1201) на разделительной позиции 2021 обтирочной платформы, робот-уборщик перемещается до монтажной позиции обтирочной платформы по первому направлению, предпочтительное первое направление представляет собой направление, обратное направлению перемещения робота-уборщика 100.
Согласно примеру осуществления, как показано на фиг. 44, при котором монтажная позиция обтирочной платформы и разделительная позиция обтирочной платформы предусмотрены отдельно, в данном примере осуществления, отсоединение и установка обтирочной платформы (122, 1201) на роботе-уборщике 100 выполняются на разных. Разумеется, в некоторых примерах осуществления монтажная позиция обтирочной платформы и разделительная позиция обтирочной платформы могут находиться в одном месте, то есть отсоединение и установка обтирочной платформы (122, 1201) на роботе-уборщике 100 выполняются в одном месте, ссылаясь на примеры осуществления, изображенные на фиг. 1-36, фиг. 37, фиг. 46, фиг. 58-63. В этих примерах осуществления, рабочая позиция обтирочной платформы применяется как в качестве монтажной позиции обтирочной платформы, так и в качестве разделительной позиции обтирочной платформы.
В одном возможном варианте, способ управления системой автоматической чистки 300 включает в себя следующие шаги: как показано на фиг. 37, в варианте в реальном масштабе времени осуществления, рабочая позиция обтирочной платформы на базовой станции 200 используется для осуществления роботом-уборщиком 100 отсоединения и установки обтирочной платформы (122, 1201) в одном и том же месте, после установки обтирочного материала на обтирочной платформе (122, 1201) робот-уборщик 100 перемещается по второму направлению на заранее установленное расстояние для возвращения на рабочую позицию обтирочной платформы, установить обтирочную платформу (122, 1201) на роботе-уборщике 100, первое направление и второе направление противоположны.
На фиг. 1-36 изображены чертежи, связанные с первым примером осуществления настоящего изобретения. На фиг. 1-3 изображены схематические конструктивные виды первого возможного варианта системы чистки 300 согласно настоящему примеру, система включает в себя робот-уборщик 100 и базовую станцию 200. Робот-уборщик 100 может быть представлен автоматической поломоечной машиной, или автоматической поломоечно-подметальной машиной, или автоматической подметальной машиной и т.д. Робот-уборщик 100 работает в рабочей зоне, выполняя такие задачи, как мытье и подметание полов, когда робот-уборщик должен возвращаться на базовую станцию 200, если было обнаружено, что нужно заменить обтирочные материалы или нужно подзаряжать робот-уборщик 100, то запускается программа возвращения, при этом робот-уборщик 100 возвращается на базовую станцию 200 для выполнения автоматической замены обтирочных материалов и/или автоматической зарядки робота-уборщика 100.
Как показано на фиг. 1, робот-уборщик 100 включает в себя корпус 101, передвижной модуль, установленный на днище корпуса 101 и перемещающийся по рабочей поверхности вместе с корпусом 101. Передвижной модуль включает в себя ходовые колеса 110, понятно, что передвижной модуль также может включать в себя гусеничную конструкцию. Робот-уборщик 100 также включает в себя механизм очистки, в данном варианте осуществления в качестве механизма очистки используется модуль очистки 120, а робот-уборщик 100 выполняет задачу по мытью полов на рабочей поверхности с помощью модуля очистки 120. В других вариантах осуществления механизм очистки робота-уборщика 100 может также включать в себя роликовую щетку и боковую щетку, которые используются для очистки от мусора, такого как пыль на полу, в углах и т.д., боковая щетка сметает мелкие загрязнения к роликовой щетке, которая убирает все загрязнения в пылесборник.
Робот-уборщик 100 также включает в себя силовой механизм, источник питания и сенсорную систему. Силовой механизм включает в себя электродвигатель и соединенный с ним передаточный механизм, который соединен с подвижным блоком, электродвигатель приводит в действие передаточный механизм, под действием передаточного механизма подвижной блок передвигается. при этом передаточный механизм может быть червячным, коническим зубчатым механизмом и др.
Источник питания робота-уборщика 100 настроен для обеспечения энергией робота-уборщика 100 и питания силового механизма, чтобы робот-уборщик 100 мог двигаться и выполнять работу. В качестве источника питания обычно используется батарейный блок. Когда расходование энергии батарейным блоком достигнет порогового значения, робот-уборщик 100 автоматически возвращается на базовую станцию 200 для пополнения энергии и продолжает работу после зарядки.
Сенсорная система робота-уборщика 100 включает в себя датчик обрыва, при обнаружении края пропасти можно изменить маршрут движения; боковой датчик, при обнаружении бокового края рабочей зоны можно генерировать команды на движение по краю; датчик наклона, при обнаружении наклона робота-уборщика можно изменить стратегию работы и издать инструкцию пользователю; и другие распространенные датчики, они повторяться здесь не будут.
Робот-уборщик 100 также включает в себя блок управления, который может быть представлен встроенным цифровым сигнальным процессором, микропроцессором, специализированной интегральной схемой, центральным процессором или программируемой пользователем вентильной матрицей и др. Блок управления может управлять роботом-уборщиком 100 в соответствии с заданными условиями или командой, полученной роботом-уборщиком 100. В частности, блок управления может управлять движением подвижного модуля в рабочей зоне робота-уборщика 100 в соответствии с предварительно установленным маршрутом, во время приведения подвижным модулем робота-уборщика 100 в движение, срабатывает механизм очистки, таким образом, удаляя пятна и пыль с поверхности рабочей зоны.
В данном примере осуществления модуль очистки 120 оборудован обтирочным материалом для удаления пыли с рабочей поверхности или очистки рабочей поверхности от загрязнения. Основной обтирочный материал 500 можно разделить, по крайней мере, на два обтирочных материала. Обтирочный материал имеет форму листа и толщину менее 0,5 см, включает в себя натуральные ткани, такие как хлопок, лен, или химические ткани, такие как полиэфирное волокно, нейлоновое волокно, или губчатые изделия, такие как резина, губки из древесной целлюлозы, или бумажные изделия, такие как необработанная древесная масса, гигроскопическая вата, а также другие одноразовые изделия как синтетические изделия из вышеуказанных материалов. В одном примере осуществления обтирочный материал может создавать статическое электричество за счет трения с рабочей поверхностью, например, статическую бумагу, таким образом адсорбируя волосы и пыль с рабочей поверхности. В одном примере осуществления обтирочный материал имеет функцию поглощения влаги и может сохранить целостность обтирочного материала в течение определенного времени.
В данном примере осуществления базовая станция 200 включает в себя устройство хранения, предназначенное для хранения основного обтирочного материала 500. Устройство хранения включает в себя принимающий модуль 211 и модуль хранения 213, принимающий модуль 211 применяется для хранения использованных обтирочных материалов, а модуль хранения 213 применяется для хранения основных обтирочных материалов 500, которые будут использоваться.
Как показано на фиг. 2, базовая станция 200 включает в себя разделительную позицию 217 обтирочного материала и монтажную позицию 215 обтирочного материала. Когда робот-уборщик 100 возвращается на базовую станцию 200, он перемещается до разделительной позиции 217 обтирочного материала, при этом обтирочный материал, установленный на роботе-уборщике 100, находится над разделительной позицией 217 обтирочного материала, таким образом можно отсоединять использованный обтирочный материал, а отсоединенный обтирочный материал поступает в принимающий модуль 211.
Как показано на фиг. 3, робот-уборщик 100, отсоединив обтирочный материал на разделительной позиции 217 обтирочного материала, отступает до монтажной позиции 215 обтирочного материала. В данном примере осуществления, базовая станция 200 включает в себя модуль подачи 220, предназначенный для выведения обтирочного материала из модуля хранения 213 до монтажной позиции 215 обтирочного материала, чтобы установить на роботе-уборщике 100. Под действием модуля подачи 220 обтирочный материал выводится из модуля хранения 213 и перемещается до монтажной позиции 215 обтирочного материала в направлении, приблизительно параллельном монтажной позиции 215 обтирочного материала, при этом нужно по мере возможности обеспечить ровность обтирочного материала.
Поскольку основной обтирочный материал 500 в модуле хранения 213 непрерывный, когда длина обтирочного материала на монтажной позиции 215 обтирочного материала соответствует заданному значению, модуль подачи 220 прекращает работу. Базовая станция 200 также включает в себя ограничительный модуль 260, предназначенный для контроля длины обтирочного материала на монтажной позиции 215 обтирочного материала, блок управления управляет модулем подачи 220 согласно результатам контроля, выполненного ограничительным модулем 260. В данном примере осуществления разделительная позиция 217 обтирочного материала и монтажная позиция 215 обтирочного материала расположены в разных местах базовой станции 200. В других примерах осуществления разделительная позиция 217 обтирочного материала и монтажная позиция 215 обтирочного материала могут быть частично или полностью совмещены.
Выборочно, базовая станция 200 включает в себя модуль расправления 250. В связи с тем, что обтирочный материал мягкий, легко сминается, после того, как модуль подачи 220 выведет свободный конец основного обтирочного материала 500, для удобства нормальной установки обтирочного материала на роботе-уборщике 100, обтирочный материал должен быть в относительно ровном состоянии. Модуль расправления 250 обеспечивает ровность обтирочного материала с помощью газового потока, прижимного стержня и других способов.
Выборочно, базовая станция 200 включает в себя модуль отрывания 280, предназначенный для отсоединения свободного конца основного обтирочного материала 500, находящегося на монтажной позиции 215 обтирочного материала, от основного обтирочного материала 500 в модуле хранения 213. Для обеспечения того, чтобы основной обтирочный материал 500 в модуле хранения 213 после установки пользователем продолжался выводиться под действием модуля подачи 220, основные обтирочные материалы 500, хранящиеся в модуле хранения 213, должны быть непрерывными. В случае, когда ограничительный модуль 260 обнаруживает, что длина обтирочного материала соответствует заданному значению, следует отсоединить свободный конец основного обтирочного материала 500 на монтажной позиции 215 обтирочного материала от основного обтирочного материала 500 в модуле хранения 213.
В одном случае непрерывный основной обтирочный материал 500 в модуле хранения 213 состоит из множества обтирочных материалов стандартной длины, соединенных друг с другом с малой прочностью соединения, которые могут быть отсоединены естественным образом в процессе установки обтирочного материала на роботе-уборщике 100. В другом случае когда обтирочный материал на монтажной позиции 215 обтирочного материала соответствует заданной длине, модуль отрывания 280 срабатывает и отсоединяет свободный конец основного обтирочного материала 500 от основного блока основного обтирочного материала.
В данном примере осуществления монтажная позиция 215 обтирочного материала включает в себя первое положение, расположенное вдали от модуля хранения 213 и второе положение, расположенное близко к модулю хранения 213. Когда обтирочный материал достигает второго положения, это означает, что длина обтирочного материала на монтажной позиции 215 обтирочного материала соответствует заданному значению, то блок управления может контролировать модуль подачи 220, чтобы последний прекратил работу. Модуль хранения 213 включает в себя выход 2111, ширина выхода 2111 больше, чем ширина обтирочного материала. Модуль подачи 220 используется для выведения основного обтирочного материала 500 из выхода 2111 на монтажную позицию 215 обтирочного материала. Выборочно, модуль хранения 213 включает в себя поворотную крышку 2113, с тем чтобы пользователь открыл и заменил основной обтирочный материал 500. Принимающий модуль 211 включает в себя выход, с тем чтобы пользователь открыл его и разбавился от использованных обтирочных материалов, хранившихся в принимающем модуле 211. Выборочно, принимающий модуль 211 включает в себя конструкцию для хранения мусорного пакета. Пользователь может поместить мусорный пакет в принимающий модуль 211, хранить использованный обтирочный материал непосредственно в мусорном пакете и извлечь мусорный пакет непосредственно через выход.
В одном примере осуществления модуль хранения 213 оборудован монтажной стойкой 51, параллельной полу, монтажная стойка 51 поддерживается подшипниками с двух сторон. Соответственно, в модуле хранения 213 можно хранить основной обтирочный материал 500 в форме рулонного основного обтирочного материала 500, включающего в себя цилиндрический полый элемент качения, обернутый основным обтирочным материалом 500, длина которого намного больше, чем что потребуется для одноразового использования. Пользователь может установить полый элемент качения в модуле хранения 213 через монтажную стойку 51, чтобы полый элемент качения мог вращаться вокруг монтажной стойки 51.
В одном примере осуществления передвижной модуль включает в себя вспомогательное колесо 102. Когда робот-уборщик 100 возвращается на базовую станцию 200, модуль очистки 120 поднимают, а вспомогательное колесо 102 опускают, передвижной модуль перемещает робот-уборщик 100 внутрь базовой станции 200. Перед тем как робот-уборщик 100 запустит процедуру установки обтирочного материала, модуль очистки 120 поддерживают в поднятом состоянии. А когда робот-уборщик 100 запускает процедуру установки обтирочного материала, вспомогательное колесо 102 поднимают и модуль очистки 120 опускают до монтажной позиции 215 обтирочного материала для осуществления установки обтирочного материала.
Как показано на фиг. 4, модуль очистки 120 включает в себя блок получения 121, предназначенный для получения нового обтирочного материала или отсоединения старого обтирочного материала, тем самым осуществляя замену обтирочного материала без вмешательства пользователя. Как показано на фиг. 4, в данном примере осуществления блок получения 121 включает в себя обтирочную платформу 122 и узел захвата 123. Узел захвата 123 включает в себя наружный элемент захвата 1231 и внутренний элемент захвата 1233, и устанавливается на обтирочной платформе 122 с помощью передаточного узла 125.
Передаточный узел 125 включает в себя первую горизонтальную шестерню 1251, вторую горизонтальную шестерню 1253 и промежуточную шестерню 1255. Имеются два наружных элемента захвата 1231, которые расположены на противоположных сторонах обтирочной платформы 122 соответственно. Первая горизонтальная шестерня 1251 и вторая горизонтальная шестерня 1253 закреплены в двух наружных элементах захвата 1231 соответственно, таким образом, первая горизонтальная шестерня 1251, вторая горизонтальная шестерня 1253 и оба наружных элемента захвата 1231 могут перемещаться одновременно. Первая горизонтальная шестерня 1251 и вторая горизонтальная шестерня 1253 сцепляются друг с другом с помощью промежуточной шестерни 1255 и постоянно совершают возвратно-поступательное движение в противоположных направлениях. Первая горизонтальная шестерня 1251 соединяется с наружным элементом захвата 1231, так что первая горизонтальная шестерня 1251 и наружный элемент захвата 1231 могут совершать возвратно-поступательное движение одновременно. Промежуточная шестерня 1255 приводится электродвигателем. Когда промежуточная шестерня 1255 вращается в первом направлении, первая горизонтальная шестерня 1251 и вторая горизонтальная шестерня 1253 сжимаются внутрь одновременно, приводя оба наружных элемента захвата 1231 сжиматься внутрь. Когда наружный элемент захвата 1231 сжимается внутрь, внутренний элемент захвата 1233 также сжимается внутрь. Пружинный элемент (условно не показан на рисунке) соединен с внутренним элементом захвата 1233 и находится в сжатом состоянии, когда внутренний элемент захвата 1233 сжимается внутрь. Когда электродвигатель приводит промежуточную шестерню 1255 во вращение во втором направлении, сила сжатия пружинного элемента выталкивает его наружу, а соединенный с ним внутренний элемент захвата 1233 отсоединяется наружу одновременно.
В одном примере осуществления на конце второй горизонтальной шестерни 1253 предусмотрена пружина (условно не показана на рисунке), причем когда первая горизонтальная шестерня 1251 совершает возвратно-поступательное движение, пружина многократно сжимается и ослабляется. Когда промежуточная шестерня 1255 приводит первую горизонтальную шестерню 1251 в движение внутрь, пружина сжимается, при этом наружный элемент захвата 1231 захватывает обтирочный материал. А когда промежуточная шестерня 1255 приводит первую горизонтальную шестерню 1251 в движение наружу, под действием силы сжатия сжатой пружины наружный элемент захвата 1231 отсоединяется наружу, высвобождая при этом обтирочный материал, находящийся между внутренним элементом захвата 1233 и наружным элементом захвата 1231. В других примерах осуществления на конце второй горизонтальной шестерне 1251 можно также предусмотреть пружину для образования двойной силы сжатия.
Как показано на фиг. 5 и фиг. 6, когда робот-уборщик 100 перемещается на базовую станцию 200 для получения обтирочного материала, под действием блока получения 121 обтирочный материал может быть съемным образом соединен с роботом-уборщиком 100. Когда промежуточная шестерня 1255 вращается в первом направлении (по часовой стрелке, показанной на фиг. 5), наружный элемент захвата 1231 перемещается внутрь в горизонтальном направлении, храповик наружного элемента захвата 1231 приводит обе стороны обтирочного материала в перемещение внутрь, так что часть обтирочного материала, прилегающая к храповику, выступает вверх. Когда наружный элемент захвата 1231 соприкасается с внутренним элементом захвата 1233, выступающий вверх обтирочный материал захвачен между этими двумя элементами. Внутренний элемент захвата 1233 имеет наклонную плоскость с внутренней стороны. Когда под действием наружного элемента захвата 1231 внутренний элемент захвата 1233 продолжает движение внутрь, наклонная плоскость внутреннего элемента захвата 1233 соприкасается с обтирочной платформой 122, в результате чего внутренний элемент захвата 1233 перемещается по наклонной плоскости и тем самым, наружный элемент захвата 1231 тоже перемещается по наклонной плоскости. Соответственно, обтирочный материал между наружным элементом захвата 1231 и внутренним элементом захвата 1233 также перемещается вверх, а обтирочный материал под обтирочной платформой 122 растягивается. Когда промежуточная шестерня 1255 не может продолжать вращение, наружный элемент захвата 1231 и внутренний элемент захвата 1233 достигают положения натяжения. В этом случае обтирочный материал в максимальной степени натянут и захвачен между наружным элементом захвата 1231 и внутренним элементом захвата 1233, не подвергают выпадать в процессе работы.
Как показано на фиг. 7 и фиг. 8, в одном примере осуществления блок получения 121 на роботе-уборщике 100 включает в себя обтирочную платформу 122 и узел вклеивания 127, при этом узел вклеивания 127 установлен с обеих сторон обтирочной платформы 122. При соприкосновении с узлом вклеивания 127, обтирочный материал может относительно устойчиво приклеиться к узлу вклеивания 127, что позволяет установить обтирочный материал на обтирочной платформе 122. В частности, узел вклеивания 127 может представлять текстильную застёжку или другие устройства, съемным образом соединенные с обтирочным материалом.
Базовая станция 200 включает в себя рабочий модуль 290, предназначенный для содействия установке обтирочного материала на роботе-уборщике 100. Рабочий модуль 290 предусмотрен под монтажной позицией 215 обтирочного материала и включает в себя первую нажимную пластину и вторую нажимную пластину. Когда робот-уборщик 100 достигает монтажной позиции 215 обтирочного материала, первая нажимная пластина и вторая нажимная пластина поворачиваются вверх, приклеивая находящийся над ними обтирочный материал к узлу вклеивания 127.
Как показано на фиг. 8, в данном примере осуществления первая нажимная пластина и вторая нажимная пластина установлены на первой шестерне и второй шестерне соответственно, первая шестерня совпадает с первой рейкой, вторая шестерня совпадает со второй рейкой, первая рейка и первая рейка соединены друг с другом и двигаются в одном направлении. В частности сердцевина зуба первой шестерни относительно устойчиво установлена на базовой станции 200, первая шестерня может вращаться относительно сердцевины зуба. Аналогично и для второй шестерни. Первая шестерня установлена над первой рейкой, вторая шестерня установлена под второй рейкой. Когда первая рейка и вторая рейка перемещаются в сторону первой рейки, первая шестерня вращается по часовой стрелке, приводя первую нажимную пластину во вращение по часовой стрелке. При этом вторая шестерня вращается против часовой стрелки, приводя вторую нажимную пластину во вращение против часовой стрелки. Для обеспечения соответствия поверхностям действия первой нажимной пластины и второй нажимной пластины, соответствующие боковые поверхности обтирочной платформы 122 выполнены наклонными, то есть узел вклеивания 127 установлен на двух наклонных плоскостях обтирочной платформы 122, прикрепляя к первой нажимной пластине и второй нажимной пластине.
Как показано на фиг. 9, модуль подачи 220 включает в себя роликовый узел 221. В данном примере осуществления роликовый узел 221 включает в себя ведущий ролик и ведомый ролик, под действием электродвигателя ведущий ролик вращается в первом направлении, приводя ведомый ролик во вращение во втором направлении. Свободный конец основного обтирочного материала 500 схвачен между роликовым узлом 221, давление между ведущим роликом и ведомым роликом создает силу трения к основному обтирочному материалу 500, приводя основной обтирочный материал 500 в движение от полого элемента качения до монтажной позиции 215 обтирочного материала. В других примерах осуществления роликовый узел 221 может включать в себя более двух роликов, например, две группы взаимодействующих друг с другом роликов, под действием двух групп роликов выводится основной обтирочный материал 500, предоставляя большую силу тяги. В других примерах осуществления роликовый узел 221 может включать в себя один ролик, который воздействует на одну поверхность базовой станции 200, за счет силы трения к основному обтирочному материалу 500, выводится свободный конец основного обтирочного материала 500 одновременно с вращением ролика.
Как показано на фиг. 10, модуль расправления 250 включает в себя вентилятор 251. Когда работает модуль подачи 220, блок управления контролирует работу вентилятора 251, воздуховыпускное отверстие вентилятора 251 обращено к первому положению, так что поток воздуха из воздуховыпускного отверстия вентилятора 251 направляется ориентировочно из второго положения к первому положению, под действием потока воздуха обтирочный материал перемещается на первое положение. Далее, за счет того, что поток воздуха из воздуховыпускного отверстия вентилятора 251 воздействует на обтирочный материал в направлении, параллельном обтирочному материалу, можно поддержать обтирочный материал в развернутом состоянии в горизонтальном направлении.
В одном примере осуществления полость, в которой расположен воздухозаборник вентилятора 251, сообщается с монтажной позицией 215 обтирочного материала, воздуховыпускное отверстие обращено к внешней стороне базовой станции 200. После выведения обтирочного материала до монтажной позиции 215 обтирочного материала, воздух вблизи монтажной позиции 215 обтирочного материала направляется внутрь вентилятора 251, создавая разрежение на монтажной позиции 215 обтирочного материала, тем самым притягивая обтирочный материал к монтажной позиции 215 обтирочного материала. Таким образом, обтирочный материал не подвержен внешнему воздействию, может оставаться на монтажной позиции 215 обтирочного материала в относительно стабильном состоянии, ожидая установки на роботе-уборщике 100.
Как показано на фиг. 11, вентилятор 251 имеет два приточных канала, первый приточный канал непосредственно сообщается с наружным пространством базовой станции 200, не воздействуя на остальные модули базовой станции 200, второй приточный канал сообщается с монтажной позицией 215 обтирочного материала. Между двумя приточными каналами и воздухозаборником вентилятора 251 установлены клапаны, например, трехходовые клапаны. Воздуховыпускное отверстие вентилятора 251 воздействует на обтирочный материал вдоль направления выведения обтирочного материала. Во время выведения обтирочного материала воздухозаборник вентилятора 251 сообщается с первым приточным каналом, под контролем блока управления клапан закрывает второй приточный канал, под действием вентилятора 251 обтирочный материал выведут на монтажную позицию 215 обтирочного материала. Как показано на фиг. 12, после того, как обтирочный материал достигнет монтажной позиции 215 обтирочного материала, воздухозаборник вентилятора 251 сообщается со вторым приточным каналом, под контролем блока управления клапан закрывает первый приточный канал. Под действием вентилятора 251 на монтажной позиции 215 обтирочного материала создается разрежение, притягивая обтирочный материал к монтажной позиции 215 обтирочного материала.
Как показано на фиг. 13, модуль расправления 250 включает в себя узел синхронного ремня 253, в частности включает в себя переднее колесо и заднее колесо, а также синхронный ремень, установленный на переднем колесе и заднем колесе, переднее колесо или заднее колесо приводит синхронный ремень в перемещение. После того, как модуль подачи 220 выведет обтирочный материал до местоположения переднего колеса, синхронный ремень приводит обтирочный материал в перемещение к первому положению. В данном примере осуществления с тем чтобы синхронный ремень больше воздействовал на обтирочный материал, на синхронном ремне предусмотрен войлок, который позволяет создать большую силу трения после соприкосновения с обтирочным материалом, способствуя перемещению обтирочного материала к первому положению. Кроме того, после достижения монтажной позиции 215 обтирочного материала, обтирочный материал не подвергают свободному перемещению под действием войлока, что позволяет предотвратить смятие обтирочного материала.
Как показано на фиг. 15, модуль расправления 250 включает в себя прижимный стержень 255, прижимный стержень 255 воздействует на обтирочный материал и перемещается ко второму положению, при этом обтирочный материал растягивается с перемещением прижимного стержня 255. В данном примере осуществления прижимный стержень 255 соединен с параллелограммным узлом 257. Параллелограммный узел 257 включает в себя станину, шатун и кривошип, в том числе станина закреплена на базовой станции 200 и совпадает со второй точкой монтажной позиции 215 обтирочного материала в направлении высоты. Под действием кривошипа шатун перемещается в направлении высоты и в горизонтальном направлении, прижимный стержень 255 соединен с шатуном через пружину кручения. Когда шатун расположен в положении А, прижимный стержень 255 находится в самой высокой точке в направлении высоты, не соприкасаясь с монтажной позицией 215 обтирочного материала. Когда шатун расположен в положении В, прижимный стержень 255 соприкасается с монтажной позицией 215 обтирочного материала. Когда шатун расположен в положении C, под действием шатуна прижимный стержень 255 достигает самой низкой точки, пружина кручения создает силу давления на прижимный стержень 255, тем самым создавая силу давления на обтирочный материал на монтажной позиции 215 обтирочного материала. Когда шатун расположен в положении D, прижимный стержень 255 перемещается ко второму положению, тем самым подтягивая обтирочный материал, расположенный между прижимным стержнем 255 и монтажной позицией 215 обтирочного материала, чтобы переместиться ко второму положению. В данном примере осуществления на втором положении монтажной позиции 215 обтирочного материала предусмотрена канавка 2150, чтобы прижимный стержень 255 вдавливался вниз в канавку 2150 пружиной кручения, натягивая обтирочный материал вниз. Когда робот-уборщик 100 выполняет установку, шатун перемещается вверх к положению E под контролем, а прижимный стержень 255 покидает монтажную позицию 215 обтирочного материала.
Как показано на фиг. 16, прижимный стержень 255 установлен на узле синхронного ремня 253 и совершает синхронное движение с узлом синхронного ремня 253. Когда свободный конец основного обтирочного материала 500 выводится из модуля хранения 213 до первого положения, узел синхронного ремня 253 вращается против часовой стрелки, перемещая прижимный стержень 255 вниз до положения a. Когда прижимный стержень 255 находится в самом низком положении, прижимный стержень 255 создает давление на основной обтирочный материал 500 и перемещается к положению b под действием узла синхронного ремня 253, тем самым, перемещая основной обтирочный материал 500. Когда прижимный стержень 255 достигает положения c, основной обтирочный материал 500 также достигает второго положения для установки на роботе-уборщике 100, при этом под действием прижимного стержня 255 основной обтирочный материал 500 натягивается. После установки на роботе-уборщике 100, узел синхронного ремня 253 продолжает двигаться, поднимая прижимный стержень 255.
Как показано на фиг. 17, ограничительный модуль 260 включает в себя узел датчика 261, предназначенный для контроля длины обтирочного материала, выведенного до монтажной позиции 215 обтирочного материала, в частность, может включать фотоэлектрический датчик или датчик Холла и др. В данном примере осуществления узел датчика 261 установлен во втором положении монтажной позиции 215 обтирочного материала. Когда узел датчика 261 обнаруживает обтирочный материал во втором положении, это означает, что длина выведенного обтирочного материала достигает заданной длины, блок управления контролирует модуль подачи 220, чтобы последний прекратил работу.
Как показано на фиг. 18, узел датчика 261 установлен на роликовом узле 221 и предназначен для контроля угла вращения роликового узла 221. Узел датчика 261 может включать в себя датчик углового перемещения и др. В связи с тем что свободный конец основного обтирочного материала 500 выведен на монтажную позицию 215 обтирочного материала под действием роликового узла 221, в случае отсутствия скольжения периметр круга за один оборот вращения роликового узла 221 соответствует длине соответствующего выведенного обтирочного материала. Поэтому можно вычислять длину выведенного обтирочного материала за счет контроля угла вращения роликового узла 221. Если угол вращения ролика, проконтролированный узлом датчика 261, достигает заданного значения, это означает, что длина выведенного обтирочного материала достигает заданного значения, в этом случае блок управления контролирует роликовый узел 221, чтобы последний прекратил работу.
Как показано на фиг. 19, основной обтирочный материал 500, хранившийся в модуле хранения 213, может состоять из множества соединенных друг с другом обтирочных материалов стандартной длины, причем прочность соединения между обтирочными материалами мала, что удобно для отрывания. В данном примере осуществления между обтирочными материалами существует множество световых отверстий. Таким образом, можно проверить длину выведенного свободного конца основного обтирочного материала 500 за счет контроля световых отверстий. Узел датчика 261 установлен во втором положении. Если узел датчика 261 обнаруживает световые отверстия, это означает, что длина выведенного свободного конца основного обтирочного материала 500 достигает заданного значения, блок управления контролирует модуль подачи 220, чтобы последний прекратил работу. В данном примере осуществления узел датчика 261 включает в себя оптический передатчик и оптический приемник. Когда оптический приемник обнаруживает свет от оптического передатчика через световые отверстия между обтирочными материалами, узел датчика 261 выдает сигнал, блок управления согласно сигналу, выданному узлом датчика 261, контролирует модуль подачи 220, чтобы последний прекратил работу.
Как показано на фиг. 20, ограничительный модуль 260 включает в себя узел датчика 263, предназначенный для контроля остатка запаса основного обтирочного материала 500 в модуле хранения 213. Когда остаток запаса меньше, чем заданное значение, блок управления напоминает пользователю о замене, чтобы предотвратить случай не возможной нормальной установки нового обтирочного материала после возвращения робота-уборщика 100 на базовую станцию 200. Узел датчика 263 может включать в себя микропереключатель или элемент Холла или элемент оптического ответвителя и др. В данном примере осуществления узел датчика 263 установлен между монтажной стойкой 51 и монтажной позицией 215 обтирочного материала. В связи с тем, что основной обтирочный материал 500 выводится непрерывно при достаточном остатке запаса, если узел датчика 263 не обнаруживает основной обтирочный материал 500, это означает, что длина остального основного обтирочного материала 500 меньше, чем используемая длина или рекомендуемая длина. В этом случае нужно напоминать пользователю о замене. В данном примере осуществления на базовой станции 200 установлен световой индикатор или зуммер и др., блок управления управляет работой светового индикатора или зуммера, напоминая пользователю. В других примерах осуществления базовая станция 200 может осуществить коммуникацию с пользовательским устройством. Если узел датчика 263 не обнаруживает основной обтирочный материал 500, то блок управления выдает информацию пользовательскому устройству.
Как показано на фиг. 21, узел датчика 263 используется для контроля высоты основного обтирочного материала 500, тем самым контролируя остаток запаса основного обтирочного материала 500. Что касается рулонного основного обтирочного материала 500, чем больше числа обертывания основного обтирочного материала 500 вокруг полого элемента качения, тем выше высоты. Поэтому основной обтирочный материал 500 с заданным остатком запаса соответствует заданной высоте. Если высота основного обтирочного материала 500 ниже чем заданная высота, то длина остального основного обтирочного материала 500 меньше, чем рекомендуемая длина, в этом случае нужно напоминать пользователю о замене.
В одном примере осуществления, узел датчика 263 используется для контроля массы рулонного основного обтирочного материала 500, тем самым контролируя остаток запаса основного обтирочного материала 500. В данном примере осуществления узел датчика 263 установлен на монтажной стойке 51 рулонного основного обтирочного материала 500. В связи с тем, что масса рулонного основного обтирочного материала 500 в модуле хранения 213 уменьшается с уменьшением основного обтирочного материала 500, поэтому когда масса основного обтирочного материала 500 меньше, чем заданное значение, или отношение массы основного обтирочного материала 500 к первоначальной массе меньше, чем заданное значение, то длина остального основного обтирочного материала 500 меньше, чем рекомендуемое значение, при этом нужно напоминать пользователю о замене
В одном примере осуществления блок управления подсчитывает сигнал от датчика 261, в каждом случае когда длина выведенного обтирочного материала достигает заданного значения, то счетчик увеличивается на 1. Когда значение счетчика равно или больше, чем заданное значение, это означает, что остаток запаса в модуле хранения 213 меньше заданного значения, то блок управления напоминает о замене.
Как показано на фиг. 21, в одном примере осуществления ограничительный модуль 260 включает в себя узел датчика 265, который установлен в принимающем модуле 211. В данном примере осуществления узел датчика 265 установлен над принимающим модулем 211 в направлении высоты, используется для контроля достижения обтирочного материала в принимающем модуле 211 монтажного положения. Понятно, что чем больше количества обтирочных материалов в принимающем модуле 211, тем выше высоты. Таким образом, когда узел датчика 265 обнаруживает, что обтирочный материал достиг монтажного положения, выдается сигнал, напоминая пользователю об избавлении от обтирочных материалов в принимающем модуле 211. В других примерах осуществления узел датчика 265 может использоваться для контроля массы и других параметров принимающего модуля 211, напоминая пользователю об избавлении путем установки порогового значения.
Как показано на фиг. 2, в одном примере осуществления модуль отрывания 280 обтирочного материала включает в себя резальное устройство 281 и приводное устройство 283. Когда длина выведенного свободного конца основного обтирочного материала 500 достигает заданного значения, блок управления с помощью приводного устройства 283 осуществляет управление резальным устройством 281, чтобы последнее соприкоснулось и воздействовало на основной обтирочный материал 500, тем самым отсоединяя основной обтирочный материал 500. В данном примере осуществления резальное устройство 281 включает в себя лезвие, установленное на держателе лезвия, приводное устройство 283 включает в себя кулачок, нижняя часть держателя лезвия соприкасается с кулачком, причем кулачок вращается под действием электродвигателя, перемещая держатель лезвия в направлении высоты. Верхняя часть держателя лезвия соединена с пружиной, которая прилагает силу для перемещения держателя лезвия вниз, удерживая держатель лезвия прижатым к кулачку. Блок управления с помощью электродвигателя приводит кулачок во вращение вокруг выходного вала электродвигателя, из изменяемого диаметра кулачка образуют тягу держателя лезвия вверх, перемещая при этом держатель лезвия в направлении высоты, в результате чего лезвие соприкасается или не соприкасается с основным обтирочным материалом 500.
Как показано на фиг. 22, в одном примере осуществления резальное устройство 281 установлено внутри модуля хранения 213. В связи с тем, что в состав резального устройства 281 входят острые режущие инструменты, такие как лезвие, для обеспечения безопасности пользователя ширина выхода 2111 модуля хранения 213 меньше или равна 3 см, чтобы предотвратить попадание пользователя в модуль хранения 213 к резальному устройству 281. В одном примере осуществления резальное устройство 281 установлено вне модуля хранения 213, для обеспечения безопасности пользователя необходимо установить дополнительный защитный колпак, включающий выход шириной не более 3 см.
Как показано на фиг. 23, резальное устройство 281 перемещается в горизонтальном направлении, днище резального устройства 281 может соприкасаться с монтажной позицией 215 обтирочного материала. В данном примере осуществления приводное устройство 283 включает в себя горизонтальную направляющую, причем резальное устройство 281 установлено на ползуне, резальное устройство 281 может перемещаться в горизонтальном направлении с перемещением ползуна вдоль направляющей. Когда работает модуль подачи 250, резальное устройство 281 смещено в сторону. Когда длина выведенного свободного конца основного обтирочного материала 500 достигает заданного значения, под контролем блока управления резальное устройство 281 перемещается в горизонтальном направлении в другую сторону ширины основного обтирочного материала 500, тем самым отсоединяя основной обтирочный материал 500. В данном примере осуществления лезвие имеет круглую форму и может быть установлено на ползуне с возможностью поворота, во время перемещения ползуна лезвие и основной обтирочный материал 500 создают трение, тем самым вызывая вращение. В других примерах осуществления лезвие других форм также может отрезать основной обтирочный материал 500 под действием ползуна.
Как показано на фиг. 1, в одном примере осуществления принимающий модуль 211 имеет отверстие, обращенное вверх, разделительная позиция 217 обтирочного материала расположена над принимающим модулем 211. Когда робот-уборщик 100 достигает разделительной позиции 217 обтирочного материала, модуль очистки 120 отсоединяет обтирочный материал, так что обтирочный материал выпадает непосредственно в принимающий модуль 211. В данном примере осуществления разделительная позиция 217 обтирочного материала не совпадает с монтажной позицией 215 обтирочного материала, причем разделительная позиция 217 обтирочного материала расположена впереди робота-уборщика 100 в направлении его перемещения. После отсоединения обтирочного материала робот-уборщик 100 может возвращаться на монтажную позицию 215 обтирочного материала для установки обтирочного материала, после этого покидает базовую станцию 200 для выполнения операции уборки.
Как показано на фиг. 24-26, в одном примере осуществления базовая станция 200 включает в себя модуль извлечения 270 обтирочного материала, предназначенный для извлечения обтирочного материала с разделительной позиции 217 обтирочного материала в принимающий модуль 211. В данном примере осуществления модуль извлечения 270 обтирочного материала установлен в принимающем модуле 211. Модуль извлечения 270 обтирочного материала включает в себя принимающий элемент 271, а также вращающийся вал 273, соединенный с принимающим элементом 271, вращающийся вал 273 поворотным образом установлен на стороне принимающего модуля 211. Когда вращающийся вал 273 вращается вниз, первая поверхность принимающего элемента 271 направляется вверх. В этом случае, принимающий элемент 271 находится на первой позиции извлечения, первая поверхность принимающего элемента 271 используется для приема использованного старого обтирочного материала. Первая позиция извлечения совмещена или частично совмещена с разделительной позицией 217 обтирочного материала. Когда модуль очистки 120 робота-уборщика 100 достигнет разделительной позиции 217 обтирочного материала, он отсоединяет обтирочный материал, так что обтирочный материал выпадает на первую поверхность принимающего элемента 271. После того как робот-уборщик 100 отсоединит обтирочный материал и покинет разделительную позицию 217 обтирочного материала, под контролем блока управления вращающийся вал 273 поворачивается вверх, а принимающий элемент 271 и вращающийся вал 273 совершают синхронный поворот. Когда угол поворота вращающегося вала 273 достигает максимума, первая поверхность принимающего элемента 271 направляется вниз. В этом случае принимающий элемент 271 находится на второй позиции извлечения, обтирочный материал опускается из принимающего элемента 271 и попадает в принимающий модуль 211. Понятно, что в данном примере осуществления, отверстие в принимающем модуле 211 выше, чем разделительная позиция 217 обтирочного материала, за счет поворота модуля извлечения 270 обтирочного материала в направлении высоты осуществляется извлечение обтирочного материала.
В одном примере осуществления разделительная позиция 217 обтирочного материала и монтажная позиция 215 обтирочного материала совмещены или частично совмещены, причем во время работы модуль извлечения 270 обтирочного материала имеет смещение в направлении высоты, то робот-уборщик 100 возвращается на базовую станцию 200 для замены обтирочного материала, совершая следующие шаги:
S1: робот-уборщик 100 перемещается до монтажной позиции 215 обтирочного материала, чтобы блок получения 121 наводился в разделительную позицию 217 обтирочного материала;
S2: робот-уборщик 100 отсоединяет обтирочный материал;
S3: робот-уборщик 100 перемещается с разделительной позиции 217 обтирочного материала;
S4: базовая станция 200 извлекает обтирочный материал;
S5: базовая станция 200 выводит новый обтирочный материал на монтажную позицию 215 обтирочного материала;
S6: робот-уборщик 100 перемещается на монтажную позицию 215 обтирочного материала;
S7: робот-уборщик 100 устанавливает обтирочный материал.
Как показано на фиг. 27-29, в одном примере осуществления модуль извлечения 270 обтирочного материала включает в себя принимающий элемент 271 и спуско-подъемный узел 275, причем принимающий элемент 271 установлен в спуско-подъемном узле 275, чтобы перемещаться в направлении высоты вместе со спуско-подъемным узлом 275. Когда принимающий элемент 271 находится в самой низкой точке спуско-подъемного узла 275, принимающий элемент 271 расположен на первой позиции извлечения. В данном примере осуществления первая позиция извлечения совмещена или частично совмещена с разделительной позицией 217 обтирочного материала. Когда модуль очистки 120 робота-уборщика 100 достигнет разделительной позиции 217 обтирочного материала, он отсоединяет обтирочный материал, так что обтирочный материал выпадает в принимающий элемент 271. После того как робот-уборщик 100 отсоединит использованный обтирочный материал и покинет разделительную позицию 217 обтирочного материала, спуско-подъемный узел 275 приводит принимающий элемент 271 в подъем и вращение в сторону принимающего модуля 211, так что первая поверхность принимающего элемента 271 направляется вниз. В этом случае принимающий элемент 271 находится на второй позиции извлечения, а обтирочный материал попадает в принимающий модуль 211. В данном примере осуществления спуско-подъемный узел 275 включает в себя синхронный ремень. Когда принимающий элемент 271 достигает наивысшей точки под действием синхронного ремня, синхронный ремень продолжает движение, при этом принимающий элемент 271 вращается вместе с синхронным ремнем и достигает второй позиции извлечения. В других примерах осуществления спуско-подъемный узел 275 может представлять собой устройства, такие как направляющий стержень.
Как показано на фиг. 30-31, модуль извлечения 270 обтирочного материала включает в себя приводной рычаг 277, который установлен на разделительной позиции 217 обтирочного материала и поворачивается в горизонтальном направлении. Когда робот-уборщик 100 отсоединяет использованный обтирочный материал, приводной рычаг 277 поворачивается в сторону принимающего модуля 211, так что под действием приводного рычага 277 обтирочный материал с разделительной позиции 217 обтирочного материала попадает в принимающий модуль 211. В данном примере осуществления отверстие в принимающем модуле 211 имеет равную высоту с разделительной позицией 217 обтирочного материала, либо отверстие в принимающем модуле 211 ниже чем разделительная позиция 217 обтирочного материала; тем не менее, модуль извлечения 270 обтирочного материала находится рядом с принимающим модулем 211, когда приводной рычаг 277 поворачивается в сторону принимающего модуля 211, обтирочный материал попадает в принимающий модуль 211. В данном примере осуществления монтажная позиция 215 обтирочного материала может совмещаться с разделительной позицией 217 обтирочного материала, причем робот-уборщик 100 может оставаться на месте после отсоединения обтирочного материала. После того как базовая станция 200 извлечет использованный обтирочный материал и выведет новый обтирочный материал, робот-уборщик осуществляет установку, после этого покидает базовую станцию 200.
Как показано на фиг. 32, модуль извлечения 270 обтирочного материала включает в себя вентилятор 279, вентилятор 279 установлен в принимающем модуле 211. Принимающий модуль 211 включает в себя вход 2701, обращенный к разделительной позиции 217 обтирочного материала, когда работает вентилятор 279, поток воздуха вокруг монтажной позиции 215 обтирочного материала поступает внутрь вентилятора 279 через вход 2701. Принимающий модуль 211 включает в себя выход 2703, через выход 2703 выходит воздух во время работы вентилятора 279. Выход 2703 может быть предусмотрен над принимающим модулем 211, либо в других направлениях, не оказывающих влияние на работу базовой станции 200. Когда работает вентилятор 279, воздух выводится из принимающего модуля 211 под действием вентилятора 279, внутри принимающего модуля 211 создается разрежение, так что обтирочный материал с разделительной позиции 217 обтирочного материала попадает в принимающий модуль 211 через вход 2701. Модуль извлечения 270 обтирочного материала также включает в себя фильтрующее устройство 274, установленное между вентилятором 279 и входом 2701, и позволяющее очистку воздуха от крупных частиц во избежание повреждения вентилятора 279. При этом, под действием вентилятора 279 обтирочный материал может двигаться вверх внутри принимающего модуля 211, фильтрующее устройство 274 позволяет избежать закрывания обтирочным материалом воздухозаборника вентилятора 279.
В одном примере осуществления разделительная позиция 217 обтирочного материала совпадает с монтажной позицией 215 обтирочного материала, причем модуль извлечения 270 обтирочного материала не перемещается в направлении высоты во время работы. Это означает, что когда робот-уборщик 100 находится на разделительной позиции 217 обтирочного материала, базовая станция 200 и робот-уборщик 100 не взаимодействуют друг на друга во время работы модуля извлечения 270 обтирочного материала. После отсоединения обтирочного материала робот-уборщик 100 может остаться на месте без перемещения и дождаться момента, пока модуль извлечения 270 обтирочного материала не извлечет обтирочный материал, модуль подачи 250 не выведет обтирочный материал, только после этого робот-уборщик выполняет установку обтирочного материала. Робот-уборщик 100 возвращается на базовую станцию 200 для замены обтирочного материала, совершая следующие шаги:
S10: робот-уборщик 100 перемещается на базовую станцию 200, чтобы блок получения 121 наводился в разделительную позицию 217 обтирочного материала;
S20: робот-уборщик 100 отсоединяет обтирочный материал;
S30: базовая станция 200 извлекает обтирочный материал;
S40: базовая станция 200 выводит обтирочный материал на монтажную позицию 215 обтирочного материала;
S50: робот-уборщик 100 устанавливает обтирочный материал.
Как показано на фиг. 33, принимающий модуль 211 установлен под разделительной позицией 217 обтирочного материала, а модуль извлечения 270 обтирочного материала включает в себя роликовый узел 278, состоящий из ведущего ролика, приводимого электродвигателем, и ведомого ролика, вращающегося под действием ведущего ролика. В данном примере осуществления ведущий ролик вращается по часовой стрелке, а ведомый ролик вращается против часовой стрелки. Когда обтирочный материал находится на разделительной позиции 217 обтирочного материала, ведущий ролик и ведомый ролик непосредственно соприкасаются с обтирочным материалом, который складывается по середине под действием ролика 278 и перемещается вниз. Когда ролик 278 продолжает вращаться, обтирочный материал продолжает опускаться и попадает в принимающий модуль 211. В одном примере осуществления в связи с тем, что принимающий модуль 211 расположен под разделительной позицией 217 обтирочного материала, если нижняя поверхность базовой станции 200 и рабочая поверхность робота-уборщика 100 находятся на одной горизонтальной плоскости, то разделительная позиция 217 обтирочного материала будет выше, чем рабочая поверхность робота-уборщика 100. Таким образом, поверхность, на которой находится разделительная позиция 217 обтирочного материала, наклонная, что позволяет роботу-уборщику 100 перемещаться с рабочей поверхности на разделительную позицию 217 обтирочного материала. В данном примере осуществления разделительная позиция 217 обтирочного материала и монтажная позиция 215 обтирочного материала находятся на одном и том же месте, то есть после перемещения до монтажной позиции 215 обтирочного материала/разделительной позиции 217 обтирочного материала робот-уборщик 100 может осуществить отсоединение и установку обтирочного материала на одном и том же месте.
Как показано на фиг. 34-35, базовая станция 200 включает в себя штуцер 201 для установки подвески ручного пылесоса, через штуцер 201 интегрируют ручной пылесос на базовую станцию 200. Для пользователей, которые наряду с роботом-уборщиком 100, используют и ручной пылесос или другие портативные устройства, установка штуцера 201 позволяет расширять пространство для хранения по высоте и повышать коэффициент использования пространства.
Как показано на фиг. 36, направление движения робота-уборщика 100 - это направление длины; направление, перпендикулярное к рабочей поверхности, - это направление высоты; направление, перпендикулярное к направлениям длины и высоты - это направление ширины. В одном примере осуществления ширина обтирочной платформы 122 меньше, чем ширина обтирочного материала, так что обе стороны обтирочного материала по направлению ширины могут быть закреплены на обтирочной платформе 122, тем самым осуществляя установку обтирочного материала. В других примерах осуществления ширина корпуса 101 робота-уборщика 100 равна или немножко больше, чем ширина обтирочной платформы 122, так что ширина робота-уборщика 100 меньше, чем ширина обтирочного материала, что позволяет повысить компактность робота-уборщика 100.
В одном примере осуществления ширина принимающего модуля 211 больше, чем ширина обтирочного материала, что позволяет обеспечить ровное нахождение обтирочного материала в принимающем модуле 211. Это означает, что ширина базовой станции 200 больше, чем ширина обтирочного материала. В одном примере осуществления ширина робота-уборщика 100 меньше, чем ширина базовой станции 200.
На фиг. 37A-46L изображены чертежи, связанные со вторым примером осуществления настоящего изобретения. Опираясь на техническую суть указанного второго примера осуществления, можно выделить три различных технических варианта, а именно: первый вариант, как показано на фиг. 37A-37L, второй вариант, как показано на фиг. 44A-44I и третий вариант, как показано на фиг. 46A-46L.
Согласно указанному второму примеру осуществления представлены модуль очистки 120, предназначенный для установки или ношения роботом-уборщиком 100, рабочий модуль 400, предназначенный для взаимодействия с указанным модулем очистки 120 для замены обтирочного материала модуля очистки 120, базовая станция 200, включающая или оборудованная указанным рабочим модулем 400, а также система чистки 300, эксплуатирующая или оборудованная указанной базовой станцией 200. В одном возможном примере осуществления робот-уборщик 100 может быть полностью одинаковым с роботом-уборщиком, указанным в вышеупомянутом первом примере осуществления, что повторяться здесь не будет.
Как показано на фиг. 37A, в первом варианте на дне корпуса 101 робота-уборщика 100 можно предусмотреть соединительный механизм, расположенный между ходовыми колесами 110 и вспомогательным колесом 102 и предназначенный для соединения с модулем очистки 120 (условно не показан). Внутри корпуса 101 можно также предусмотреть подъемный механизм, позволяющий переместить соединительный механизм вверх и вниз и приводящий модуль очистки 120 в подъем или спуск, в качестве данного подъемного механизма можно использовать известную кулачковую конструкцию. На вершине корпуса 101 можно предусмотреть детекторный элемент, подключенный к блоку управления, например модуль лазерного сканирования, для контроля наличия препятствия на передней стороне в направлении движения робота-уборщика 100. При обнаружении детекторным элементом препятствия на передней стороне в направлении движения робота-уборщика 100, под контролем блока управления подъемный механизм поднимает модуль очистки 120 и освобождает вспомогательное колесо 102. В этом случае робот-уборщик 100 находится в режиме преодоления препятствия. После преодоления роботом-уборщиком 100 препятствия, под контролем блока управления подъемный механизм опускает модуль очистки 120, вспомогательное колесо 102 складывается. В этом случае робот-уборщик 100 находится в режиме работы, то есть может выполнять операции уборки.
Соединительный механизм и модуль очистки 120 соединены съемным образом. Через некоторое время работы обтирочный материал на роботе-уборщике 100 становится грязным. Под контролем блока управления робот-уборщик 100 перемещается на базовую станцию 200, далее робот-уборщик 100 высвобождает модуль очистки 120 на базовой станции 200. После этого базовая станция 200 заменяет обтирочный материал для модуля очистки 120, отсоединенного от робота-уборщика 100, в частности, выполняет следующие операции: снимает грязный обтирочный материал из модуля очистки 120, устанавливает на модуле очистки 120 новый или чистый обтирочный материал.
Как показано на фиг. 39А и 39В, в одном из примеров осуществления настоящего изобретения модуль очистки 120 может включать в себя обтирочную платформу 1201 и загрузочную часть 1202, вращательно соединенную с обтирочной платформой 1201, причем обтирочный материал может быть схвачен между обтирочной платформой 1201 и загрузочной частью 1202. Обтирочная платформа 1201 имеет в целом форму пластины, включая, но не ограничиваясь этим, прямоугольную форму пластины, как показано на фиг. 39А и 39В, нижняя поверхность которой может иметь форму дуги с плавным переходом, или форму плоскости.
Обтирочная платформа 1201 имеет первую захватную поверхность 1211, загрузочная часть 1202 имеет вторую захватную поверхность 1212, противоположную первой захватной поверхности 1211. В одном примере осуществления первая захватная поверхность 1211 представляет собой часть зоны на верхней поверхности обтирочной платформы 1201, вблизи от края верхней поверхности обтирочной платформы 1201, простирается вдоль направления длины обтирочной платформы 1201 и имеет приблизительно длинную форму. Соответственно, вторая захватная поверхность 1212 представляет собой нижнюю поверхность загрузочной части 1202, предпочтительно, имеет такую же форму или соответствует форме первой захватной поверхности 1211, то есть длинную форму.
Загрузочная часть 1202 может включать в себя основную часть захвата 1213 и поворотную часть 1215, соединенную с основной частью захвата 1213. В том числе, основная часть захвата 1213 может иметь в целом форму длинного стержня, нижняя поверхность которого образует вторую захватную поверхность 1212. Поворотная часть 1215 вращательно соединена с обтирочной платформой 1201, то есть загрузочная часть 1202 осуществляет вращательное соединение с обтирочной платформой 1201 через поворотную часть 1215.
Для повышения стабильности вращательного соединения загрузочной части 1202 с обтирочной платформой 1201, к основной части захвата 1213, предпочтительно, может быть присоединено более 1 поворотной части 1215, например, могут быть 2 или больше. Две или больше поворотных частей 1215 расположены на одной стороне вдоль направления оси основной части захвата 1213, причем все поворотные части 1215 приблизительно перпендикулярны к основной части захвата 1213. Как показано на фиг. 39А и 39В, в одном схематическом примере осуществления имеются две поворотных части 1215, которые расположены на двух концах основной части захвата 1213 соответственно. Предпочтительно, поворотная часть 1215 может быть образована путем изгиба обоих концов основной части захвата 1213 в одну сторону (угол изгиба примерно 90°). В данном примере осуществления поворотная часть 1215 и основная часть захвата 1213 выполнены как одно целое, но на практике этим не ограничиваются.
В связи с тем что загрузочная часть 1202 вращательно соединена с обтирочной платформой 1201, поэтому загрузочная часть 1202 имеет зажатое состояние, позволяющее зажать обтирочный материал, и открытое состояние для снятия зажима и освобождения обтирочного материала.
Как показано на фиг. 39A, когда загрузочная часть 1202 находится в зажатом состоянии, первая захватная поверхность 1211 прикрепляется ко второй захватной поверхности 1212, таким образом захватывая обтирочный материал между ними. В это время обтирочный материал может обернуть или покрыть нижнюю поверхность обтирочной платформы 1201, его конец захватывается между двумя прикрепленными друг к другу захватными поверхностями. Как показано на фиг. 39B, когда загрузочная часть 1202 находится в открытом состоянии, первая захватная поверхность 1211 отсоединяется от второй захватной поверхности 1212, таким образом высвобождая обтирочный материал.
Для повышения прочности зажима к обтирочному материалу и предотвращения выпадения обтирочного материала из модуля очистки 120 в ходе выполнения роботом-уборщиком 100 операции уборки, имеющим или оснащенным модулем очистки 120, модуль очистки 120 еще может включать в себя узел поддержания зажима, предназначенный для приложения силы зажима к загрузочной части 1202, чтобы поддержать загрузочную часть в зажатом состоянии или переключать ее в зажатое состояние. Наличие указанной силы зажима позволяет загрузочной части 1202 всегда иметь тенденцию находиться в зажатом состоянии, либо всегда иметь тенденцию переключаться в зажатое состояние. Таким образом, при отсутствии воздействия внешней силы, противоположной силе зажима, как правила, загрузочная часть 1202 находится в зажатом состоянии.
В одном возможном примере осуществления, сила зажима прилагается за счет силы упругости, приложенной эластичным элементом. В частности, узел поддержания зажима может включать в себя эластичный элемент, установленный между обтирочной платформой 1201 и загрузочной частью 1202. При этом в данном примере осуществления сила зажима представляет собой силу упругость, созданную эластичным элементом.
Одно решение вышеуказанного примера осуществления может заключаться в том, что поворотная часть 1215 вращательно соединена с обтирочной платформой 1201 через штырь, эластичный элемент может быть пружиной кручения, надетой на штырь, концы пружины кручения упираются на обтирочную платформу 1201 и загрузочную часть 1202 соответственно, прилагая при этом силу упругости к загрузочной части 1202, чтобы загрузочная часть всегда имела силу для поворота в сторону первой захватной поверхности 1211 обтирочной платформы 1201. В частности, как показано на фиг. 39А и 39В, пружина кручения прилагает силу упругости к загрузочной части 1202, чтобы последняя вращалась вниз или подержалась в зажатом состоянии.
Альтернативно, другое реализуемое решение может заключаться в том, что эластичный элемент может быть пружиной растяжения, оба конца которой соединены с первой захватной поверхностью 1211 и второй захватной поверхностью 1212 соответственно. При этом пружина растяжения должна всегда находиться в растянутом состоянии. Таким образом, пружина растяжение может всегда прилагать силу растяжения пружины к загрузочной части 1202. Чтобы уменьшить заполнение двух захватных поверхностей пружиной растяжения, и по мере возможности избежать создания препятствия или помехи обтирочному материалу, пружина растяжения может быть расположена в основной части захвата 1213 вблизи ее конца.
Альтернативно, еще другое реализуемое решение может заключаться в том, что эластичный элемент может быть эластичной пластиной, которая закреплена на обтирочной платформе 1201, конец поворотной части 1215 упирается на эластичную пластину. В частности, как показано на фиг. 39А и 39В, на обтирочной платформе 1201 предусмотрена предотвращающая канавка 1203, соответствующая поворотной части 1215, место вращательного соединения поворотной части 1215 с обтирочной платформой 1201 расположено между двумя концами поворотной части 1215, то есть место вращательного соединения поворотной части 1215 с обтирочной платформой 1201 расположено приблизительно в центре поворотной части 1215. В этом случае основная часть захвата 1213 и конец поворотной части 1215, обращенный в сторону от основной части захвата 1213 (так называемый - концом срабатывания 1214), могут образовать рычажную конструкцию, опорной точкой которой является место вращательного соединения поворотной части 1215 с обтирочной платформой 1201. Эластичная пластина установлена в предотвращающей канавке 1203, нижняя поверхность конца срабатывания 1214 поворотной части 1215 упирается на эластичную пластину, так что эластичная пластина постоянно прилагает к концу срабатывания 1214 силу упругости вверх. Таким образом согласно принципу рычага, основная часть захвата 1213 всегда имеет тенденцию к вращению вниз или захвату корпуса 101.
В вышеуказанных примерах осуществления приложение силы зажима осуществляется за счет эластичного элемента (пружины кручения, пружины растяжения, эластичной пластины). Стоит отметить, что на практике можно использовать любое из вышеприведенных трех решений, можно также использовать комбинацию любых двух или всех трех вышеуказанных решений.
Разумеется, приложенная сила зажима не ограничивается силой упругости в вышеуказанных примерах осуществления. В другом возможном примере осуществления, сила зажима прилагается за счет силы магнитного поля. В частности, узел поддержания зажима может включать в себя элемент поддержания (условно не показан), установленный на первой захватной поверхности 1211, и согласующий элемент (условно не показан), установленный на второй захватной поверхности 1212 и соответствующий элементу поддержания. При этом, среди элемента поддержания и согласующего элемента, один из них является магнитным элементом, другой - намагничивающимся элементом или магнитным элементом. В этом случае, в данном примере осуществления сила зажима представляет собой силу магнитного притяжения, создаваемую элементом поддержания к согласующему элементу.
Приложение силы зажима за счет силы магнитного поля осуществляется без физических соединительных элементов, что позволяет упростить конструкцию.
В данном примере осуществления магнитный элемент может быть элементом, способным генерировать магнитное поле, например, может быть магнитом с магнетизмом (например, постоянный магнит или жесткий магнит), или может быть электромагнитным элементом, способным генерировать магнетизм после включения электропитания (например, электромагнит). Намагничивающийся элемент может быть изготовлен из намагничивающихся материалов, таких как железо, кобальт, никель, которые могут притягиваться магнитной силой.
Среди элемента поддержания и согласующего элемента, один из них является магнитным элементом, другой - намагничивающимся элементом или магнитным элементом, включая: среди элемента поддержания и согласующего элемента, один из них является магнитным элементом, другой - намагничивающимся элементом; либо, и элемент поддержания, и согласующий элемент являются магнитными элементами. Когда как элемент поддержания, так и согласующий элемент являются магнитными элементами, полярность элемента поддержания, обращенного к согласующему элементу, и полярность согласующего элемента, обращенного к элементу поддержания, различны.
В более предпочтительном варианте, для того чтобы уменьшить массу модуля очистки 120 в целом, загрузочная часть 1202 в целом или основная часть захвата 1213 может быть изготовлена из намагничивающегося материала. Таким образом, загрузочная часть 1202 самостоятельно или основная часть захвата 1213 образуют согласующий элемент, тем самым избегая случая, когда из-за дополнительной установки согласующего элемента на загрузочной части 1202 увеличивается масса.
Элемент поддержания может быть магнитом, и существует множество магнитов, которые равномерно расположены по направлению длины первой захватной поверхности 1211. Следовательно, элемент поддержания может равномерно притягивать основную часть захвата 1213 в направлении длины, а зажимный эффект загрузочной части 1202 хороший. Конкретный способ расположения может заключаться в том, что первая захватная поверхность 1211 вгибается внутрь, образуя множество размещающих канавок, элементы поддержания размещаются в соответствующих размещающих канавках соответственно. Тем не менее, элементы поддержания предпочтительно находятся не выше захватной поверхности 1211 после размещения в размещающих канавках. Таким образом, вторая захватная поверхность 1212 может хорошо прикрепиться к первой захватной поверхности 1211, избегая наличия зазора между этими двумя захватными поверхностями, тем самым повышая силу зажима обтирочного материала и обеспечивая зажимной эффект.
Выше приведены примеры осуществления, в которых сила зажима прилагается за счет магнитного поля. Следует отметить, что оба вышеупомянутых примера приложения силы зажима могут быть сконфигурированы в модуле очистки 120 одновременно, или может быть выбран и использован любой из этих двух примеров. Иными словами, сила зажима может быть любой из силы упругости, генерируемой эластичным элементом, или силы магнитного притяжения, создаваемой согласующим элементом, или может быть комбинацией этих двух сил.
Для дальнейшего повышения прочности зажима загрузочной части 1202 на обтирочном материале можно предусмотреть две загрузочные части 1202, эти две загрузочные части 1202 соответственно расположены на двух противоположных сторонах обтирочной платформы 1201 (например, на левой и правой сторонах как показано на фиг.39A и 39B). Таким образом, оба конца обтирочного материала зажимаются между первой захватной поверхностью 1211 второй захватной поверхностью 1212 соответственно, обеспечивая повышенную прочность зажима обтирочного материала.
Если предусмотрены две загрузочные части 1202, когда загрузочные части 1202 находятся в зажатом состоянии, то модуль очистки 120 в целом в плоском состоянии, при котором верхняя поверхность плоская (как показано на фиг. 39A). Однако, когда загрузочные части 1202 находятся в открытом состоянии, внешние концы обеих загрузочных частей 1202 (основная часть захвата 1213) складываются или поднимаются вверх соответственно, так что модуль очистки 120 в целом в состоянии, при котором верхняя поверхность изгибается внутрь (как показано на фиг. 39B).
С помощью вышеупомянутого примера осуществления, в котором усилие зажима приложено и две загрузочные части 1202 расположены симметрично, можно значительно увеличить силу зажима обтирочного материала, чтобы в максимальной степени предотвратить выпадение обтирочного материала из модуля очистки 120 в ходе выполнения роботом-уборщиком 100 операции уборки, имеющим или оснащенным модулем очистки 120.
В связи с постоянным наличием силы зажима, приложенной узлом поддержания зажима к загрузочной части 1202, поэтому при отсутствии внешнего воздействия загрузочная часть 1202, как правила, находится в зажатом состоянии. Следовательно, для осуществления перехода загрузочной части 1202 из зажатого состояния к открытому состоянию необходимо внешнее усилие для противостояния силе зажима. В частности, следуя вышеприведенному описанию, конец срабатывания 1214 поворотной части 1215, обращенной задней стороной к основной части захвата 1213, может быть выполнен с возможностью приема силы внешнего воздействия. Когда сила воздействия больше заданного порога, загрузочная часть 1202 может вращаться вокруг места вращательного соединения поворотной части с обтирочной платформой 1201, тем самым переключаясь из зажатого состояния в открытое состояние.
В данном примере осуществления заданный порог устанавливается в зависимости от величины плеча силы. Согласно принципу рычага F1S1=F2S2, при известном значении расстояния S1 от конца срабатывания 1214 до опорной точки вращения, расстояния S2 от основной части захвата 1213 до опорной точки вращения, а также силы зажима F2, приложенной к основной части захвата 1213, сила воздействия составляет F1=F2S2/S1. Так что, на практике, когда сила внешнего воздействия, приложенная к концу срабатывания 1214, достигает или превышает заданный порог F2S2/S1, открывается загрузочная часть 1202.
Далее, для обеспечения успешного открытия, когда конец срабатывания 1214 подвергают силе внешнего воздействия, на обтирочная платформа 1201 предусмотрена предотвращающая канавка 1203, соответствующая поворотной части 1215. Как показано на фиг. 39A, когда захватный узел находится в зажатом состоянии, конец срабатывания 1214, по крайней мере, частично находится вне предотвращающей канавки 1203, чтобы облегчить взаимодействие внешнего узла (в частности, верхний выступ 404, упомянутый ниже) с концом срабатывания 1214. Когда сила внешнего воздействия превышает заданный порог, открывается загрузочная часть 1202, при этом конец срабатывания 1214 вращается вниз, входя в предотвращающую канавку 1203. Таким образом, можно избежать создания обтирочной платформой 1201 препятствия или помехи концу срабатывания 1214, обеспечивая успешное открытие загрузочной части 1202. Кроме того, установка предотвращающей канавки 1203 позволяет обеспечить, по крайней мере, частичное нахождение в ней поворотной части 1215, когда загрузочная часть 1202 находится в зажатом состоянии, следовательно, по мере возможности обеспечить плоскость верхней поверхности модуля очистки 120, облегчая установку модуля очистки 120 и робота-уборщика 100.
Как показано на фиг. 40-43С, установка 400, предложенная в примере осуществления настоящего изобретения и предназначенная для замены обтирочного материала в модуле очистки 120, может включать в себя: опорную раму 401, съемным образом присоединенную к обтирочной платформе 1201 модуля очистки 120, первый передвижной механизм 402, установленный на опорной раме 401, и силовой механизм 410, приводящий первый передвижной механизм 402 в перемещение вдоль опорной рамы 401 внутрь или наружу по первому направлению L1.
Когда обтирочная платформа 1201 модуля очистки 120 присоединена к опорной раме 401, загрузочная часть 1202 находится в открытом состоянии, под действием силового механизма 410 первый передвижной механизм 402 может перемещаться в первом направлении L1 внутрь, подталкивая обтирочный материал к первой захватной поверхности 1211 обтирочной платформы 1201. Когда модуль очистки 120 отсоединяется от опорной рамы 401, загрузочная часть 1202 переключается в зажатое состояние.
В данном примере осуществления опорная рама 401 может иметь в целом форму пластины, аналогичную форме обтирочной платформы 1201 модуля очистки 120, и аналогичным образом включает, но не ограничиваясь этим, прямоугольную форму пластины, как показано на фиг. 40. Первый передвижной механизм 402 установлен на опорной раме 401, может перемещаться вдоль опорной рамы 401 внутрь или наружу по первому направлению L1 под действием силового механизма 410. При этом первое направление L1 - это направление, указанное стрелкой L1, как показано на фиг. 40, или горизонтальное направление (влево-вправо), как показано на фиг. 41A, фиг. 41C, фиг. 42A, фиг. 42C, фиг. 43A и фиг. 43С. «Перемещаться внутрь» означает, что первый подвижной механизм 402 перемещается в направлении к внутренней или центральной части опорной рамы 401, а «перемещаться наружу» означает, что первый подвижной механизм 402 перемещается в направлении от внутренней или центральной части опорной рамы 401. Вышеприведенное пояснение аналогичным образом применимо к второму передвижному механизму 403.
Когда первый передвижной механизм 402 приводится в перемещение внутрь, он может подтолкнуть новый или чистый обтирочный материал к первой захватной поверхности 1211 обтирочной платформы 1201, и, следовательно, количество первых передвижных механизмов должно совпадать или быть равным количеству загрузочных частей 1202. В вышеупомянутом случае, когда имеются, предпочтительно, две загрузочные части 1202, количество первых передвижных механизмов 402 также предпочтительно равно двум, и два первых передвижных механизма 402 расположены на двух противоположных сторонах опорной рамы 401 вдоль первого направления L1, что является, в частности, левой и правой сторонами, показанными на фиг. 40, фиг. 41A, фиг. 41C, фиг. 42A, фиг. 42C, фиг. 43A и фиг. 43С. Кроме того, два первых передвижных механизма 402 предпочтительно расположены симметрично.
Как показано на фиг. 40, в одном возможном примере осуществления первый передвижной механизм 402 может включать в себя элемент перемещения 4021 и элемент сгребания 4022, вращательно соединенный с элементом перемещения 4021. Силовой механизм 410 может приводить элемент перемещения 4021 в движение в первом направлении L1, а элемент перемещения 4021 заставляет перемещаться элемент сгребания 4022. Элемент перемещения 4021 и элемент сгребания 4022 могут быть в целом в форме полосового стержня и располагаться параллельно, оба конца элемента сгребания 4022 имеют соединительные проушины, идущие к элементу перемещения 4021, и элемент сгребания 4022 вращательно соединен с двумя концами элемента перемещения 4021 с помощью двух соединительных проушин. Внешний конец элемента сгребания 4022 снабжен крючкообразной конструкцией, изгибающейся внутрь, чтобы обеспечить лучший контакт с обтирочным материалом, подталкивая обтирочный материал к обтирочной платформе 1201.
Первый передвижной механизм 402 может проводиться в движение как под прямым действием силового механизма 410, так и под косвенным или пассивным действием благодаря взаимодействию со вторым передвижным механизмом 403, указанным ниже. Косвенное или пассивное действие благодаря взаимодействию со вторым передвижным механизмом 403 описывается ниже, здесь представлен способ прямого воздействия силового механизма.
Когда имеется один первый передвижной механизм 402, силовой механизм 410 может непосредственно приводить в действие первый передвижной механизм 402 для перемещения внутрь или наружу. В этом случае, в данном примере осуществления силовой механизм 410 может быть пневматическим цилиндром, гидравлическим цилиндром и т.п., или силовой механизм 410 с помощью двигателя приводит шестерню, чтобы она вошла в сцепление с рейкой, предусмотренной на первом передвижном механизме 402.
Однако, когда имеются два первых передвижных механизма 402, оба первых передвижных механизма 402 должны перемещаться одновременно наружу или внутрь. Следовательно, два силовых механизма могут приводить два первых передвижных механизма 402 в перемещение одновременно наружу или внутрь соответственно, конкретный вариант осуществления ссылается на вышеуказанные примеры осуществления. В качестве альтернативы, один силовой механизм может приводить в движение два первых передвижных механизма 402 одновременно наружу или внутрь. В частности, в двух первых передвижных механизмах 402 предусмотрены рейки соответственно, две рейки входят в сцепление с одной и той же шестерней, и две рейки расположены с двух противоположных сторон шестерни.
Далее, для того чтобы загрузочная часть 1202 переключалась из зажатого состояния в открытое состояние, когда обтирочная платформа 1201 модуля очистки 120 присоединена к опорной раме 401, как показано на фиг. 43С, на опорной раме 401 можно предусмотреть верхний выступ 404, верхний выступ 404 может быть образован в результате выпучивания вниз нижней части опорной рамы 401. Когда модуль очистки 120 присоединен к опорной раме 401, верхний выступ 404 может упираться на конец срабатывания 1214 поворотной части 1215. Следовательно, загрузочная часть 1202 открывается, высвобождая грязный обтирочный материал.
Фактически, после того, как верхний выступ 404 стыкуется с концом срабатывания 1214, внешняя сила все еще должна быть приложена к модулю очистки 120, чтобы открыть загрузочную часть 1202, конкретный процесс описывается ниже. После открытия загрузочной части 1202, модуль очистки 120 все еще должна прикрепиться к опорной раме 401, чтобы установить новый обтирочный материал на модуле очистки 120.
Для достижения этой цели, модуль очистки 120 может аналогичным образом прикрепляться к опорной раме 401 с помощью силы магнитного поля. В частности, на обтирочной платформе 1201 модуля очистки 120 можно установить первый присоединительный элемент (условно не показан), на опорной раме 401 можно установить второй присоединительный элемент (условно не показан), соответствующий первому присоединительному элементу. В частности, первый присоединительный элемент установлен на верхней поверхности обтирочной платформы 1201, второй присоединительный элемент установлен на нижней поверхности опорной рамы 401. Среди первого присоединительного элемента и второго присоединительного элемента, один из них является магнитным элементом, другой - намагничивающимся элементом или магнитным элементом. При этом для намагничивающегося элемента и магнитного элемента можно сделать ссылку на вышеприведенные пояснения, что повторяться здесь не будет. Первый присоединительный элемент может создавать силу магнитного притяжения ко второму присоединительному элементу, чтобы модуль очистки 120 поддерживал присоединение между моделью очистки и опорной рамой 401.
После того, как модуль очистки 120 завершит замену обтирочного материала, необходимо отсоединить модуль очистки 120 от опорной рамы 401. По этой причине, на опорной раме 401 можно установить с возможностью вращения разделяющий элемент 405. Разделяющий элемент 405 имеет состояние приема, при котором он установлен на опорной раме 401, и состояние выступа, при котором внешний конец разделяющего элемента выступает из опорной рамы 401. Когда разделяющий элемент 405 находится в состоянии приема, модуль очистки 120 присоединен к опорной раме 401; а когда разделяющий элемент 405 переключен в состояние выступа, разделяющий элемент 405 стыкуется с обтирочной платформой 1201 модуля очистки 120, отсоединяя обтирочную платформу от опорной рамы 401.
Как показано на фиг. 40, фиг. 41B, фиг. 42B и фиг. 43B, опорная рама 401 снабжена сквозным отверстием 406 в месте, близком к концу опорной рамы, верхний конец разделяющего элемента 405 может быть вращательно присоединен к внутренней стенке сквозного отверстия 406 через штырь. Нижняя торцевая поверхность разделяющего элемента 405 может иметь форму дуги с плавным переходом, и когда разделяющий элемент 405 постепенно переключается из состояния приема в состояние выступа, расстояние, на которое нижняя торцевая поверхность разделяющего элемента 405 выступает из опорной рамы 401, постепенно увеличивается, тем самым постепенно увеличивая силу, прилагаемую к обтирочной платформе 1201 модуля очистки 120, и наконец, отталкивая обтирочную платформу 1201.
Далее, между разделяющим элементом 405 и опорной рамой 401 можно установить элемент сброса, который прилагает к разделяющему элементу 405 силу сброса, заставляющую разделяющий элемент поддерживать состояние приема или переключаться в состояние приема. В данном примере осуществления элемент сброса может быть пружиной кручения, надетой на штырь и прилагающей к разделяющему элементу 405 силу, заставляющую разделяющий элемент входить внутрь, так что разделяющий элемент 405 входит в опорную раму 401 при отсутствии внешнего воздействия.
Чтобы заставить разделяющий элемент 405 переключаться в состояние выступа, на опорной раме 401 предусмотрен второй передвижной механизм 403. Когда первый передвижной механизм 402 перемещается внутрь или наружу по первому направлению L1, второй передвижной механизм 403 перемещается наружу или внутрь соответственно по второму направлению L2, по сущности второе направление L2 перпендикулярно к первому направлению L1. В частности, когда первый передвижной механизм 402 перемещается внутрь по первому направлению L1, второй передвижной механизм 403 перемещается наружу соответственно по второму направлению L2. Аналогично, когда первый передвижной механизм 402 перемещается наружу по первому направлению L1, второй передвижной механизм 403 перемещается внутрь соответственно по второму направлению L2. При этом, второе направление L2 - это направление, указанное стрелкой L2, как показано на фиг. 40, или вертикальное направление вверх-вниз, как показано на фиг. 41A, фиг. 41В, фиг. 42A, фиг. 42В, фиг. 43A и фиг. 43В.
Разделяющий элемент 405 расположен на внешней стороне второго передвижного механизма 403 вдоль второго направления L2. Как показано на фиг. 42B и фиг. 43B, когда второй передвижной механизм 403 перемещается наружу вдоль второго направления L2, второй передвижной механизм 403 подталкивает разделяющий элемент 405, чтобы разделяющий элемент переключился из состояния приема в состояние выступа. В частности, при перемещении наружу второй передвижной механизм 403 постепенно приближается к разделяющему элементу 405 и, в конце концов, входит в контакт с разделяющим элементом 405. Когда второй передвижной механизм 403 продолжает перемещаться наружу, он приводит разделяющий элемент 405 во вращение, заставляя нижний конец разделяющего элемента постепенно вытягиваться из опорной рамы 401. Вытянутый нижний конец разделяющего элемента 405 стыкуется с обтирочной платформой 1201 модуля очистки 120, с увеличением длины вытянутого нижнего конца разделяющего элемента 405, увеличивается и сила стыковки разделяющего элемента 405 с обтирочной платформой 1201, и в конце концов, преодолевая силу магнитного притяжения между первым присоединительным элементом и вторым присоединительным элементом, отсоединяя обтирочную платформу 1201 от опорной рамы 401.
Разумеется, варианты осуществления присоединения и отсоединения обтирочной платформы 1201 от опорной рамы 401 не ограничиваются вышеуказанным примером осуществления. В другом возможном примере осуществления можно не установить разделяющий элемент 405 и второй передвижной механизм 403, вышеупомянутая цель может быть достигнута лишь за счет изменения первого присоединительного элемента и второго присоединительного элемента.
В частности, среди первого присоединительного элемента и второго присоединительного элемента, один из них является электромагнитным элементом, другой - магнитным элементом или намагничивающимся элементом. Например, первый присоединительный элемент является электромагнитным элементом, второй присоединительный элемент - магнитным элементом или намагничивающимся элементом. Или наоборот. Когда на электромагнитный элемент подается питание, может генерироваться магнитное поле, тем самым адсорбируя второй присоединительный элемент, чтобы заставить обтирочную платформу 1201 присоединиться к опорной раме 401, и впоследствии, может быть выполнена замена обтирочного материала. После замены обтирочного материала отключается электромагнитный элемент, магнитное поле исчезает, и обтирочная платформа 1201 падает под действием силы тяжести, естественным образом отсоединяясь от опорной рамы 401.
В данном примере осуществления второй передвижной механизм 403 образован из пластинчатой конструкции. Кроме того, также предпочтительно имеется два вторых передвижных механизма 403, которые расположены на двух других противоположных сторонах опорной рамы 401 вдоль второго направления L2. А именно на верхней и нижней сторонах, как показано на фиг. 40, фиг. 41A, фиг. 41B, фиг. 42A, фиг. 42B, фиг. 43A и фиг. 43B. Кроме того, два первых передвижных механизма 402 предпочтительно расположены симметрично.
Для того чтобы один силовой механизм 410 смог приводить в действие два передвижных механизма одновременно, ссылаясь на фиг. 41A, фиг. 42A и фиг. 43A, первый передвижной механизм 402 снабжен первой частью отслеживания контура 4023, второй передвижной механизм 403 снабжен второй частью отслеживания контура 4032, при этом вторая часть отслеживания контура 4032 взаимодействует с первой частью отслеживания контура 4023. Взаимодействие между первой частью отслеживания контура 4023 и второй частью отслеживания контура 4032 используется для передачи движущей силы от одного передвижного механизма к другому передвижному механизму. Когда один из двух передвижных механизмов перемещается внутрь или наружу по направлению, соответствующему данному передвижному механизму, другой передвижной механизм перемещается наружу или внутрь по направлению, соответствующему данному передвижному механизму, под действием взаимодействия первой части отслеживания контура 4023 со второй частью отслеживания контура 4032.
В одном примере осуществления среди первой части отслеживания контура 4023 и второй части отслеживания контура 4032, одна из них является канавкой скольжения, другая - выступом, вставленным в канавку скольжения. В примере осуществления, показанном на фиг. 40, первая часть отслеживания контура 4023 является выступом, вторая часть отслеживания контура 4032 - канавкой скольжения. Конкретный способ размещения заключается в том, что первый передвижной механизм 402 расположен между опорной рамой 401 и вторым передвижным механизмом 403, то есть первый передвижной механизм 402 расположен на нижнем ярусе, второй передвижной механизм 403 расположен на верхнем ярусе. На элементе перемещения 4021 первого передвижного механизма 402 расположены два опорных рычага 4024, на каждом из опорных рычагов 4024 расположено по одному выступу. Соответственно, на втором передвижном механизме 403 предусмотрены две канавки скольжения. Когда один из передвижных механизмов приводится силовым механизмом в перемещение, взаимодействие выступа с канавкой скольжения заставляет другой передвижной механизм перемещаться.
Как показано на фиг. 41A, фиг. 42A и фиг. 43A, канавка скольжения сегментирована и включает в себя два участка: наклонный участок и прямой участок, причем прямой участок соединен с внутренним концом наклонного участка. Наклонный участок наклоняется наружу по второму направлению L2, прямой участок параллелен второму направлению L2.
В одном примере осуществления силовой механизм 410 может включать в себя шестерню 407, приводимую во вращение электродвигателем, рейку 408, находящуюся в сцеплении с шестерней 407, рейка 408 расположена на первом передвижном механизме 402 или втором передвижном механизме 403. В случае, когда имеются два первых передвижных механизма 402 и два вторых передвижных механизма 403, можно использовать один силовой механизм 410, чтобы заставить два передвижных механизма двигаться одновременно внутрь или наружу, имеются две рейки 408, которые расположены соответственно на двух первых передвижных механизмах 402 или двух вторых передвижных механизмах 403.Причем две рейки 408 расположены с двух сторон шестерни 407.
Силовой механизм может приводить в действие два передвижных механизма одновременно согласно двум способам, а именно:
Первый способ. Силовой механизм непосредственно приводит первый передвижной механизм 402 в перемещение по первому направлению L1, и перемещением первого передвижного механизма 402 приводится второй передвижной механизм 403 в перемещение по второму направлению L2 благодаря взаимодействию первой части отслеживания контура 4023 со второй частью отслеживания контура 4032. То есть первый передвижной механизм 402 непосредственно приводится силовым механизмом 410 в перемещение, и второй передвижной механизм 403 косвенно приводится силовым механизмом 410 в перемещение благодаря взаимодействию первой части отслеживания контура 4023 со второй частью отслеживания контура 4032.
Второй способ. Силовой механизм 410 непосредственно приводит второй передвижной механизм 403 в перемещение по второму направлению L2, и перемещением второго передвижного механизма 403 приводится первый передвижной механизм 402 в перемещение по первому направлению L1 благодаря взаимодействию первой части отслеживания контура 4023 со второй частью отслеживания контура 4032. То есть второй передвижной механизм 403 непосредственно приводится силовым механизмом 410 в перемещение, и первый передвижной механизм 402 косвенно приводится силовым механизмом 410 в перемещение благодаря взаимодействию первой части отслеживания контура 4023 со второй частью отслеживания контура 4032.
Пример осуществления, показанный на фиг. 40, фиг. 41A, фиг. 42A и фиг. 43A, представляет собой вышеизложенный второй способ, и процесс, в котором силовой механизм 410 одновременно приводит в действие два передвижных механизма, представлен ниже со ссылкой на фиг. 40, фиг. 41A, фиг. 42A и фиг. 43A.
В данном схематическом примере осуществления первый передвижной механизм 402 расположен на опорной раме 401, второй передвижной механизм 403 расположен на первом передвижном механизме 402, то есть первый передвижной механизм 402 и второй передвижной механизм 403 расположены последовательно на опорной раме 401 снизу вверх. Имеются два первых передвижных механизма 402 и два вторых передвижных механизма 403, первая часть отслеживания контура 4023 является выступом, а вторая часть отслеживания контура 4032 является канавкой скольжения. На каждом втором передвижном механизме 403 предусмотрена одна рейка 408, шестерня 407 сцеплена с двумя рейками 408, причем две рейки 408 расположены на двух противоположных сторонах шестерни 407. Когда электродвигатель приводит шестерню 407 во вращение, шестерня приводит две противоположно расположенные рейки 408 в привод, таким образом приводя вторые передвижные механизмы 403 в перемещение друг к другу (внутрь) или друг от друга (наружу). Благодаря взаимодействию выступа с канавкой скольжения первые передвижные механизмы 402 соответственно приводятся в перемещение друг от друга (наружу) или друг к другу (внутрь).
Чтобы реализовать вышеуказанный первый способ привода, на основе вышеуказанного схематического примера осуществления, место расположения первого передвижного механизма 402 и второго передвижного механизма 403 могут быть поменяны местами, первая часть отслеживания контура 4023 и вторая часть отслеживания контура 4032 могут быть такие как, как и в вышеуказанном примере осуществления, или противоположны им, рейка 408 может быть расположена на первом передвижном механизме 402. Соответственно, когда электродвигатель приводит шестерню 407 во вращение, шестерня приводит две противоположно расположенные рейки 408 в привод, таким образом приводя первые передвижные механизмы 402 в перемещение друг к другу (внутрь) или друг от друга (наружу). Благодаря взаимодействию выступа с канавкой скольжения вторые передвижные механизмы 403 соответственно приводятся в перемещение друг от друга (наружу) или друг к другу (внутрь).
Далее, на опорной раме 401 можно также установить верхнюю крышку 409, верхняя крышка 409 закрывает два передвижных механизма. На верхней крышке 409 предусмотрено длинное отверстие, в данном отверстии размещена рейка 408 для направления и выравнивания перемещения рейки 408. Кроме того, электродвигатель, приводящий шестерню 407, может быть размещен на верхней крышке 409.
Процесс, в котором рабочий модуль 400 согласно примеру осуществления настоящего изобретения заменяет новый или чистый обтирочный материал 600 для модуля очистки 120, описан ниже со ссылкой на фиг. 41A-43C.
Как показано на фиг. 41A-41C, за счет магнитного притяжения между первым присоединительным элементом и вторым присоединительным элементом, обтирочная платформа 1201 модуля очистки 120 прикрепляется к днищу опорной рамы 401. Верхний выступ 404, расположенный на днище опорной рамы 401, стыкуется с концом срабатывания 1214 поворотной части 1215, поворотная часть 1215 поворачивается вверх, открывается загрузочная часть 1202. Шестерня 407 приводится во вращение вперед, а именно по часовой стрелке, как показано на фиг. 41A, левая рейка 408 приводится в движение вверх, а правая рейка 408 приводится в движение вниз. Соответственно, нижний второй передвижной механизм 403 перемещается вверх, а верхний второй передвижной механизм 403 перемещается вниз. То есть, оба вторых передвижных механизма 403 перемещается внутрь. Между тем, благодаря взаимодействиям выступа с наклонным участком канавки скольжения, левый первый передвижной механизм 402 перемещается налево, а правый первый передвижной механизм 402 перемещается направо. То есть оба вторых передвижных механизма 403 перемещается наружу.
Как показано на фиг. 42A-42C, шестерня 407 приводится во вращение в обратном направлении, а именно против часовой стрелки, как показано на фиг. 42A, левая рейка 408 приводится в движение вниз, а правая рейка 408 приводится в движение вверх. Соответственно, нижний второй передвижной механизм 403 перемещается вниз, а верхний второй передвижной механизм 403 перемещается вверх. То есть оба вторых передвижных механизма 403 перемещается наружу. Между тем благодаря взаимодействиям выступа с наклонным участком канавки скольжения, левый первый передвижной механизм 402 перемещается направо, а правый первый передвижной механизм 402 перемещается налево. То есть оба вторых передвижных механизма 403 перемещается внутрь. Следовательно, два конца обтирочного материала 600 подталкиваются к первой захватной поверхности 1211 обтирочной платформы 1201, а нижний конец второго передвижного механизма 403 прижимает концевую часть обтирочного материала 600 к первой захватной поверхности 1211 обтирочной платформы 1201, пока выступ не переместится к стыку наклонного участка и прямого участка канавки скольжения.
Как показано на фиг. 43A-43С, шестерня 407 приводится в действие электродвигателем для продолжения вращения в обратном направлении. При этом выступ входит в прямой участок канавки скольжения и стыкуется с нижней стенкой прямого участка. В этом случае второй передвижной механизм 403 продолжает двигаться наружу, а первый передвижной механизм 402 больше не продолжает двигаться внутрь. Далее, второй передвижной механизм 403 стыкуется с разделяющим элементом 405, разделяющий элемент 405 выходит из опорной рамы 401 и отталкивает обтирочную платформу 1201. Следовательно, модуль очистки 120 отсоединяется от опорной рамы 401 и падает под действием силы собственной тяжести. Под действием элемента поддержания и согласующего элемента, загрузочная часть 1202 модуля очистки 120 поворачивается вниз и переключается в зажатое состояние, зажимая обтирочный материал 600.
Ссылаясь на вышеизложенное, процесс, в котором рабочий модуль 400 отсоединяет грязный обтирочный материал из модуля очистки 120, противоположен вышеуказанному процессу, что повторяться здесь не будет.
Рабочий модуль 400 согласно примеру осуществления настоящего изобретения расположен на базовой станции 200, данная базовая станция 200 используется для парковки робота-уборщика 100 и для замены очистки для модуля очистки 120, отсоединенного от робота-уборщика 100.
Как показано на фиг. 37A-37L согласно примеру осуществления настоящего изобретения базовая станция 200 может включать в себя кожух 202, в кожухе 202 может быть предусмотрен вход (условно не показан) для прохождения робота-уборщика 100. На дне кожуха 202 предусмотрена рабочая позиция 2023 обтирочного материала, а поддон 203 обтирочной платформы расположен на рабочей позиции 2023 обтирочного материала. Робот-уборщик 100 входит на базовую станцию 200 через вход, отсоединяя грязный модуль очистки 120 на поддон 203 обтирочной платформы, расположенный на рабочей позиции 2023 обтирочного материала. После того, как рабочий модуль 400 завершит замену обтирочного материала, и когда новый модуль очистки 120 выпадет на рабочую позицию 2023 обтирочного материала, робот-уборщик 100 устанавливает новый модуль очистки.
Рабочий модуль 400 расположен внутри кожуха 202 на заданной высоте в кожухе 202. Кроме того, внутри кожуха 202 еще расположены поддон 203 обтирочной платформы, предназначенный для размещения модуля очистки 120 и расположенный под рабочим модулем 400, модуль снабжения 204, предназначенный для обеспечения модуля очистки 120 обтирочными материалами, а также тяговый механизм 205, предназначенный для притягивания обтирочного материала, поступающего от модуля снабжения 204, к модулю очистки 120.
Модуль снабжения 204 в целом расположен над рабочим модулем 400 или под углом над ним, может включать в себя намоточный вал и обтирочный материал, намотанный вокруг намоточного вала, при этом намоточный вал расположен с возможностью вращения на внутренней стенке кожуха 202. Кроме того, модуль снабжения 204 может еще включать в себя, по крайней мере, одну пару толкающих роликов 2041. Эти два толкающих ролика 2041 расположены противоположно, между ними имеется зазор для прохождения обтирочного материала. Два ролика приводятся электродвигателем во встречное вращение, подталкивая обтирочный материал вперед или назад. «Вперед» - это направление, отходящее от намоточного вала, а «назад» - это направление, указывающее на намоточный вал.
Тяговый механизм 205 может включать в себя передающий элемент 2051 и фрикционный элемент 2052, расположенный на передающем элементе 2051. Как показано на фиг. 37A-37L, передающий элемент 2051 может быть синхронным ремнем, в целом намотанным в горизонтальном направлении, и в целом расположен на той же высоте, что и рабочий модуль 400. В кожухе 202 в местах, близких к левому и правому концам, расположено по одному передаточному колесу, синхронный ремень намотан на два передаточных колеса, и одно из передаточных колес приводится электродвигателем в активное вращение, далее приводя синхронный ремень в движение. Синхронный ремень может в целом включать в себя два параллельных участка: верхний и нижний, фрикционный элемент 2052 расположен на нижнем участке синхронного ремня. В частности, фрикционный элемент 2052 может быть конструкцией с щетками, включающей в себя корпус в форме блока, расположенный на синхронном ремне, и щетки, расположенные на верхней и нижней поверхностях корпуса в форме блока. Таким образом, можно увеличить контактное трение между обтирочными материалами, следовательно, приводя в движение обтирочные материалы.
Передающий элемент 2051 может приводить фрикционный элемент 2052 в возвратно-поступательное движение между первым положением и вторым положением. При этом, первое положение и второе положение являются двумя предельными положениями перемещения фрикционного элемента 2052, в частности, положениями, близкими к положениям левого и правого передаточных колес соответственно. В частности, первое положение может быть положением фрикционного элемента 2052, показанного на фиг. 37A, первое положение может быть положением фрикционного элемента 2052, показанного на фиг. 37G.
Кроме того, рабочий модуль 400 расположен между первым положением и вторым положением, в частности, проекция рабочего модуля 400 на передающем элементе 2051 расположена между первым положением и вторым положением. Таким образом, во время перемещения между первым положением и вторым положением фрикционный элемент 2052 может проходить через рабочий модуль 400, чтобы удалить грязный обтирочный материал, отсоединенный от модуля очистки 120 и адсорбированный на рабочем модуле 400, также потянуть новый или чистый обтирочный материал, предоставленный модулем снабжения 204, к модулю очистки 120, для установки на модуле очистки 120.
В частности, когда передающий элемент 2051 заставляет фрикционный элемент 2052 перемещаться из первого положения во второе положение, то есть перемещаться слева направо, как показано на фиг. 37A-37L, фрикционный элемент 2052 может соприкасаться с грязным обтирочным материалом, попавшимся на поддон 203 обтирочной платформы, и тянуть грязный обтирочный материал ко второму положению. В частности, как показано на фиг. 37F, в этом случае поддон 203 обтирочной платформы расположен под рабочим модулем 400 и немного ниже, чем фрикционный элемент 2052. Когда фрикционный элемент 2052 перемещается во второе положение и проходит через поддон 203 обтирочной платформы, щетки, расположенные на нижней поверхности фрикционного элемента 2052, соприкасаются с грязным обтирочным материалом, попавшимся на поддон 203 обтирочной платформы, тем самым, сметая грязный обтирочный материал ко второму положению и, наконец, перемещая грязный обтирочный материал из поддона 203 обтирочной платформы.
Соответственно, когда передающий элемент 2051 заставляет фрикционный элемент 2052 перемещаться из второго положения в первое положение, то есть перемещаться справа налево, как показано на фиг. 37A-37L, фрикционный элемент 2052 может соприкоснуться с новым или чистым обтирочным материалом, предоставленным модулем снабжения 204, и тянуть обтирочный материал к первому положению. Ссылаясь на фиг. 37H, когда фрикционный элемент 2052 перемещается в первое положение, щетки, расположенные на верхней поверхности фрикционного элемента 2052, могут соприкоснуться с обтирочным материалом, предоставленным модулем снабжения 204, тем самым подтягивая обтирочный материал к первому положению.
Далее, внутри кожуха 202 предусмотрена камера для извлечения 206, предназначенная для сбора грязных обтирочных материалов, камера для извлечения 206 расположена во втором положении. В частности, как показано на фиг. 37A-37L, камера для извлечения 206, по сущности, расположена внутри кожуха 202 и соответствует правому передаточному колесу. Камера для извлечения 206, по сущности, выполнена в виде кожуха с верхним отверстием, включает в себя коробку 2061 и подошву 2062, расположенную на дне коробки 2061.
в одном возможном примере осуществления, камера для извлечения 206 закреплена в кожухе 202 вдоль вертикального направления, то есть положение камеры для извлечения 206 в кожухе 202, по крайней мере, в вертикальном направлении является фиксированным.
Однако нужно обеспечить, что робот-уборщик 100 может входить или выходить из кожуха 202. Следовательно, чтобы не создавать препятствия или помехи роботу-уборщику 100 во время входа и выхода из корпуса 202, высота камеры для извлечения 206, неподвижно установленной внутри корпуса 202 в вертикальном направлении, по крайней мере, не должна ниже высоты робота-уборщика 100. В результате чего увеличивается высота корпуса 202, и следовательно, базовая станция 200 оказывается большой по объему и с плохой портативностью.
Ввиду этого, в другом возможном примере осуществления, камера для извлечения 206 может быть выполнена с возможностью подъема и опускания в кожухе 202 в вертикальном направлении. Когда робот-уборщик 100 входит в кожух 202, камера для извлечения поднимается, предотвращая создание препятствия или помехи роботу-уборщику 100; а когда робот-уборщик 100 выходит из кожуха 202, камера для извлечения может опускаться. Таким образом, можно обеспечить полное использование пространства кожуха 202 по высоте. Конкретное решение осуществления будет подробно представлено ниже.
В кожухе 202 можно установить подъемный механизм 207, подъемный механизм 207 соединен с поддоном 203 обтирочной платформы, чтобы приводить поддон 203 обтирочной платформы в перемещение к рабочему модулю 400 или от него, то есть приводить поддон 203 обтирочной платформы в перемещение вверх и вниз. В одном возможном примере осуществления подъемный механизм 207 может быть аналогичен тяговому механизму 205 в конструктивном исполнении, включает в себя верхнее и нижнее передаточные колеса и синхронный ремень, намотанный вокруг двух передаточных колес, поддон 203 обтирочной платформы может быть соединен с синхронным ремнем.
Для обеспечения подъема и опускания камеры для извлечения 206 в кожухе 202, камера для извлечения 206 может приводиться другим подъемным механизмом; и конечно же, альтернативно может приводится подъемным механизмом 207. То есть один подъемный механизм 207 используется для осуществления движения поддона 203 обтирочной платформы и камеры для извлечения 206 вверх и вниз. В частности, подъемный механизм 207 включает в себя, по крайней мере, четыре передаточных колеса, чтобы определить, по крайней мере, четыре угловых точки. Следовательно, подъемный механизм 207 включает в себя, по крайней мере, первый подъемный участок 2071 и второй подъемный участок 2072, эти два подъемных участка соединены с двумя горизонтальными участками соответственно. Два подъемных участка расположены в целом параллельно, поэтому когда синхронный ремень вращается, два подъемных участка двигаются точно противоположно. Поддон 203 обтирочной платформы и камера для извлечения 206 соединены с первым подъемным участком 2071 и вторым подъемным участком 2072 соответственно, поэтому ситуации подъема и спуска поддона 203 обтирочной платформы и камеры для извлечения 206 противоположны, когда подъемный механизм 207 работает. То есть, когда первый подъемный участок 2071 перемещается вверх, второй подъемный участок 2072 перемещается вниз, приводя поддон 203 обтирочной платформы и камеру для извлечения 206 в перемещение вверх и вниз соответственно, и наоборот.
Ссылаясь на фиг. 37A-37C, поддон 203 обтирочной платформы изначально расположен на дне кожуха 202. Соответственно, в этом случае камера для извлечения 206 расположена в самой высокой точке кожуха 202. Таким образом, камера для извлечения 206 не будет закрывать вход в кожух 202, и, следовательно, робот-уборщик 100 может войти в кожух 202 беспрепятственно и достичь до положения поддона 203 обтирочной платформы. Затем, робот-уборщик 100 высвобождает модуль очистки 120 на поддон 203 обтирочной платформы и покидает кожух 202. Подъемный механизм 207 двигается, заставляя первый подъемный участок 2071 двигаться вверх, и, соответственно, второй подъемный участок 2072 двигаться вниз. Следовательно, поддон 203 обтирочной платформы приводится в движение вверх, неся модуль очистки 120, пока модуль очистки 120 и рабочий модуль 400 не присоединены для выполнения операции замены обтирочного материала, и камера для извлечения 206 перемещается вниз для сбора грязных обтирочных материалов. Таким образом, один подъемный механизм 207 может использоваться для одновременного подъема или опускания поддона 203 обтирочной платформы и камеры для извлечения 206, так что камера для извлечения 206 может располагаться в относительно низком положении, когда камера для извлечения собирает грязный обтирочный материал, и в относительно высоком положении, когда робот-уборщик 100 должен войти в кожух 202 или покинуть кожух, а также может учитывать необходимость сборки модуля очистки 120 с рабочим модулем 400 и роботом-уборщиком 100. Следовательно, базовая станция 200 может быть выполнена относительно компактно, с небольшой высотой, относительно небольшим объемом и относительно хорошей портативностью.
Когда подъемный механизм 207 поднимает модуль очистки 120 вверх с помощью поддона 203 обтирочной платформы, пока обтирочная платформа 1201 модуля очистки 120 не прикрепится к опорной раме 401 рабочего модуля 400, верхний выступ 404 на дне опорной рамы 401 стыкуется с верхней поверхностью конца срабатывания 1214 поворотной части 1215, таким образом поворачивается поворотная часть 1215, заставляя загрузочную часть 1202 модуля очистки 120 переключаться из зажатого состояния в открытое состояние.
В данном примере осуществления поддон 203 обтирочной платформы используется для размещения модуля очистки 120 или для размещения обтирочного материала. В одном возможном примере осуществления поддон 203 обтирочной платформы может быть в виде пластинчатой конструкции в целом и расположен в целом горизонтально. Как показано на фиг. 38A и фиг. 38B, в еще одном возможном примере осуществления, поддон 203 обтирочной платформы выполнен в складном исполнении, включает в себя основную часть 2031 и позиционирующие элементы 2032, вращательно расположенные на противоположных сторонах основной части 2031. Корпус 101 представляет собой плоскую пластинчатую конструкцию, оба конца которой снабжены выступами 2033, идущими вертикально вверх, внешние стороны двух выступов 2033 изгибаются внутрь для образования соединительных канавок 2034, в соединительных канавках 2034 расположены ползуны 2035, ползуны 2035 соединены с синхронным ремнем подъемного механизма 207, тем самым осуществляя соединение подъемного механизма 207 с поддоном 203 обтирочной платформы. Ссылаясь на фиг. 37A и фиг. 37L, далее, между ползуном 2035 и соединительной канавкой 2034 имеется буферный элемент (например, пружина), чтобы амортизировать колебания поддона 203 обтирочной платформы во время подъема и опускания.
Аналогичным образом, способ соединения камеры для извлечения 206 с синхронным ремнем подъемного механизма 207 может ссылаться на вышеупомянутую конструкцию, то есть коробка 2061 может соединиться с синхронным ремнем через другой ползун 2053, что повторяться здесь не будет.
Позиционирующий элемент 2032 в целом имеет длинную структуру, сечение которой может иметь такую изгибную форму, как форма «7», и имеет внешний конец, расположенный за пределами основной части 2031, и внутренний конец, расположенный под корпусом 101, причем точка поворотного соединения позиционирующего элемента 2032 с основной частью 2031 расположена между внутренним концом и внешним концом. Точно так же, позиционирующий элемент 2032 также образует рычажную конструкцию, опорная точка данной рычажной конструкции является точкой поворотного соединения позиционирующего элемента 2032 с основной частью 2031.
Поддон 203 обтирочной платформы имеет расправленное состояние и сложенное состояние. Когда поддон находится в расправленном состоянии, верхние поверхности двух позиционирующих элементов 2032 и верхняя поверхность основной части 2031 находятся примерно вровень. В этом случае, внутренний конец позиционирующего элемента 2032 стыкуется с нижней поверхностью основной части 2031, а поддон 203 обтирочной платформы в целом в плоском состоянии, при котором верхняя поверхность ровная (как показано на фиг. 38A). Однако, когда поддон обтирочной салфетки находится в сложенном состоянии, верхние концы двух позиционирующих элементов 2032 складываются вверх, так что модуль очистки 120 в целом в состоянии, при котором верхняя поверхность изгибается внутрь (как показано на фиг. 39B). В этом случае, внутренний конец позиционирующего элемента 2032 отсоединяется от нижней поверхности основной части 2031, а поддон 203 обтирочной платформы в целом в состоянии, при котором верхняя поверхность изгибается внутрь (как показано на фиг. 38B).
Далее, когда модуль очистки 120 и рабочий модуль 400 не находятся в контакте, поддон 203 обтирочной платформы находится в расправленном состоянии. А когда модуль очистки 120 входит в контакт с рабочим модулем 400, поддон 203 обтирочной платформы переключается в сложенное состояние, два позиционирующих элемента 2032 стыкуются с двумя противоположными сторонами модуля очистки 120, тем самым зажимая модуль очистки 120 между двумя позиционирующими элементами и корректируя положение модуля очистки 120, чтобы модуль очистки соединился с опорной рамой 401 наилучшим образом.
Как показано на фиг. 37E, после того, как загрузочная часть 1202 модуля очистки 120 переключается в открытое состояние, подъемный механизм 207 впоследствии приводит поддон 203 обтирочной платформы в перемещение вниз на участок, а высвобожденный грязный обтирочный материал падает на поддон 203 обтирочной платформы. Впоследствии, после того, как тяговый механизм 205 подтягивает обтирочный материал к заданному положению, подъемный механизм 207 приводит поддон 203 обтирочной платформы в движение вверх, заставляя поддон 203 обтирочной платформы и модуль очистки 120 войти в контакт, в этом случае поддон 203 обтирочной платформы переключается из развернутого состояния в сложенное состояние. Следовательно, позиционирующий элемент 2032 поддона 203 обтирочной платформы сгибает обтирочный материал вверх, тем самым помогая первому передвижному механизму 402 рабочего модуля 400 подтолкнуть обтирочный материал к первой захватной поверхности 1211 обтирочной платформы 1201.
Если позиционирующий элемент 2032 не подвергают внешним воздействиям, то поддон 203 обтирочной платформы находится в расправленном состоянии, конкретный вариант осуществления такой же, как в предыдущем описании, можно установить элемент сброса между позиционирующим элементом 2032 и основной частью 2031. Альтернативно, внешний конец позиционирующего элемента 2032 выполнен относительно большим по массе или длинным по длине. Следовательно, под действием принципа рычага, внутренний конец позиционирующего элемента 2032 естественным образом стыкуется с нижней поверхностью основной части 2031, а поддон 203 обтирочной платформы находится в расправленном состоянии.
Для того чтобы поддон 203 обтирочной платформы переключился из расправленного состояния в сложенное состояние, как показано на фиг. 38A и фиг. 38B, внутренний конец позиционирующего элемента 2032 снабжен стопорным элементом 2036, а наружный конец выходит из основной части 2031. В кожухе 202 установлены стопорные планки 208, взаимодействующие со стопорным элементом 2036, имеются две стопорных планки 208, которые расположены с двух сторон первого подъемного участка 2071. Как показано на фиг. 37D, в процессе, при котором подъемный механизм 207 поднимает модуль очистки 120 вверх с помощью поддона 203 обтирочной платформы, когда модуль очистки 120 входит в контакт с рабочим модулем 400, стопорная планка 208 также просто стыкуется с наружным концом стопорного элемента 2036, тем самым заставляя поддон 203 обтирочной платформы переключиться из расправленного состояния в сложенное состояние.
Весь процесс, в котором базовая станция 200 согласно примеру осуществления настоящего изобретения заменяет обтирочный материал для робота-уборщика 100, представлен ниже со ссылкой на фиг. 37A-37L.
Как показано на фиг. 37A, робот-уборщик 100, несущий модуль очистки 120, готовится заехать на базовую станцию 200. В этом случае поддон 203 обтирочной платформы расположен на дне базовой станции 200, а камера для извлечения 206 подвешен на высоте за счет синхронного ремня, тем самым открывая вход в кожухе 202, чтобы робот-уборщик 100 беспрепятственно вошел на базовую станцию 200.
Как показано на фиг. 37B, робот-уборщик 100 входит на базовую станцию 200, высвобождая модуль очистки 120 на поддон 203 обтирочной платформы. В этом случае поддон 203 обтирочной платформы находится в расправленном состоянии.
Как показано на фиг. 37C, робот-уборщик 100 покидает базовую станцию 200.
Как показано на фиг. 37D, подъемный механизм 207 работает, в частности синхронный ремень подъемного механизма 207 вращается по часовой стрелке, заставляя поддон 203 обтирочной платформы перемещаться вверх, вместе с этим, камера для извлечения 206 перемещается вниз. Поддон 203 обтирочной платформы несет на себе модуль очистки 120 и перемещается вверх, пока модуль очистки 120 не войдет в контакт с опорной рамой 401. Верхний выступ 404 на дне опорной рамы 401 стыкуется с верхней поверхностью конца срабатывания 1214, открывая при этом обтирочную платформу 1201 и высвобождая грязный обтирочный материал. В это время стопорная планка 208 стыкуется с наружным концом стопорного элемента 2036, позиционирующий элемент 2032 поворачивается, поддон 203 обтирочной платформы переключается в сложенное состояние, позиционирующий элемент 2032 стыкуется с двумя сторонами обтирочной платформы 1201 модуля очистки 120, чтобы скорректировать положение обтирочной платформы 1201 и зажать обтирочную платформу 1201.
Как показано на фиг. 37Е, подъемный механизм 207 движется в обратном направлении. В частности, синхронный ремень подъемного механизма 207 вращается против часовой стрелки, заставляя поддон 203 обтирочной платформы перемещаться вниз на определенное расстояние, вместе с этим, высвобожденный грязный обтирочный материал падает на поддон 203 обтирочной платформы. Под действием первого присоединительного элемента и второго присоединительного элемента, модуль очистки 120 адсорбируется к опорной раме 401, заставляя модуль очистки 120 продолжать сохранять состояние прикрепления к опорной раме 401.
Как показано на фиг. 37F, тяговый механизм 205 работает. В частности, синхронный ремень тягового механизма 205 вращается против часовой стрелки, заставляя фрикционный элемент 2052 двигаться направо (в направлении второго положения), нижняя поверхность фрикционного элемента 2052 войдет в контакт с грязным обтирочным материалом, попавшим на поддон 203 обтирочной платформы, и подталкивая грязный обтирочный материал направо.
Как показано на фиг. 37G, синхронный ремень тягового механизма 205 продолжает вращаться против часовой стрелки, фрикционный элемент 2052 продолжает приводить грязный обтирочный материал в движение направо, и наконец, грязный обтирочный материал покидает поддон 203 обтирочной платформы и падает в камеру для извлечения 206.
Как показано на фиг. 37H, толкающий ролик 2041 модуля снабжения 204 приводится электродвигателем в действие, подталкивая новый или чистый обтирочный материал, намотанный вокруг намоточного вала, вперед на определенное расстояние. Затем синхронный ремень тягового механизма 205 вращается по часовой стрелке, фрикционный элемент 2052 приводится в движение влево (в направлении первого положения), верхняя поверхность фрикционного элемента 2052 входит в контакт с новым или чистым обтирочным материалом, тем самым царапая и потягивая обтирочный материал влево. Между тем, толкающий ролик 2041 также работает синхронно, непрерывно толкая обтирочный материал вперед. Когда фрикционный элемент 2052 достигает первого положения, толкающий ролик 2041 перестает вращаться.
Как показано на фиг. 37I, толкающий ролик 2041 вращается в обратном направлении, потягивая обтирочный материал обратно на некоторое расстояние. После того, как элемент обнаружения 209 (например, может быть фотоэлектрический датчик), расположенный над тяговым механизмом 205, обнаруживает, что обтирочный материал перемещается назад на заранее установленное расстояние, толкающий ролик останавливается.
Как показано на фиг. 37J, синхронный ремень подъемного механизма 207 вращается по часовой стрелке, поддон 203 обтирочной платформы перемещается вверх, пока модуль очистки 120 не будет прикреплен к опорной раме 401. Наряду с этим, стопорная планка 208 стыкуется с наружным концом стопорного элемента 2036, заставляя поддон 203 обтирочной платформы снова переключаться в сложенное состояние, наружный конец позиционирующего элемента 2032 загибается вверх, чтобы загнуть обтирочный материал вверх. После этого толкающий ролик 2041 продолжает вращаться в обратном направлении, отрывая обтирочный материал в точке разрыва.
Как показано на фиг. 37K, силовой механизм 410 рабочего модуля 400 работает, приводя в действие первый передвижной механизм 402, чтобы подтолкнуть к первой захватной поверхности 1211 обтирочной платформы 1201. Вместе с этим, второй передвижной механизм 403 толкает разделяющий элемент 405, чтобы разделяющий элемент вытянулся и отодвинул обтирочную платформу 1201, а загрузочная часть 1202 переключается в зажатое состояние, зажимая при этом обтирочный материал на модуле очистки 120. Затем, синхронный ремень подъемного механизма 207 вращается против часовой стрелки, и поддон 203 обтирочной платформы перемещается вниз. При этом камера для извлечения 206 поднимается вверх, пока поддон 203 обтирочной платформы не достигнет дна кожуха 202, в это время камера для извлечения 206 поднимается на самое высокое место и останавливается.
Как показано на фиг. 37L, робот-уборщик 100 снова входит на базовую станцию 200 и покидает базовую станцию 200, установив на своем дне модуль очистки 120 после замены обтирочного материала. После этого можно провести операции уборки.
Из вышеизложенного процесса замены можно увидеть, что в вышеупомянутом примере осуществления, чтобы избежать помех, созданных в отношении поддона 203 обтирочной платформы, для замены обтирочного материала робот-уборщик 100 должен входить на базовую станцию 200 и выходить с нее дважды, поэтому необходимо повысить эффективность замеры обтирочного материала. Исходя из этого, во втором примере осуществления настоящего изобретения предложено следующее решение для дальнейшего улучшения.
Как показано на фиг. 44A-44I, в кожухе 202 базовой станции 200 предусмотрена рабочая позиция обтирочной платформы, которая включает в себя разделительную позицию 2021 обтирочной платформы и монтажную позицию 2022 обтирочной платформы. Разделительная позиция 2021 обтирочной платформы используется для размещения поддона 203 обтирочной платформы, а монтажная позиция 2022 обтирочной платформы расположена между входом кожуха 202 и разделительной позицией 2021 обтирочной платформы и используется для размещения модуля очистки 120, чтобы заменить на новый обтирочный материал.
Базовая станция 200 еще включает в себя механизм перемещения и изменения положения 212, расположенный в кожухе 202. Как показано на фиг. 45, данный механизм перемещения и изменения положения 212 включает в себя: поворотный рычаг 2121, вращательно расположенный на внутренней стенке кожуха 202, обращенной к входу. Поворотный рычаг 2121 выполнен приблизительно в виде стержня, имеет соединительный конец (левый конец, как показано на фиг. 45), вращательно соединенный с внутренней стенкой кожуха 202, и свободный конец (правый конец, как показано на фиг. 45), расположенный противоположно соединительному концу. Соединительный конец и свободный конец снабжены с возможностью вращения первым синхронным колесом и вторым синхронным колесом (условно не показано) соответственно, вокруг первого синхронного колеса и второго синхронного колеса намотан синхронный ремень 2122, в синхронном ремне 2122 присоединен толкательный сухарь 2123. Первое синхронное колесо соединено с электродвигателем, который приводит во вращение первое синхронное колесо, приводя синхронный ремень 2122 и его толкательный сухарь 2123 в действие. В частности, поворотный рычаг 2121 установлен с возможностью вращения на внутренней стенке кожуха 202 с помощью опоры 2124, а передаточный вал 2125, установленный на соединительном конце, соединен с выходным валом электродвигателя через проушину на опоре 2124.
Толкательный сухарь 2123 может быть изготовлен из намагничивающихся материалов, таких как железо, кобальт, никель, может притягиваться магнитной силой, в качестве альтернативы, на толкательном сухаре 2123 установлен магнитный элемент 2127, такой как магнит. Поворотный рычаг 2121 снабжен первым магнитом 2126 и вторым магнитом (условно не показан) в местах, близких к соединительному концу и свободному концу соответственно. Когда толкательный сухарь 2123 под действием синхронного ремня 2122 перемещается и приближается к соединительному концу или свободному концу, первый магнит 2126 или второй магнит могут соответственно создавать силу магнитного притяжения для толкательного сухаря 2123, давая толкательному сухарю 2123 стабильную тенденцию к нахождению на соединительном конце или свободном конце.
Принцип работы настоящего примера осуществления заключается в следующем: поворотный рычаг 2121 первоначально находится в вертикальном состоянии, толкательный сухарь 2123 приближается к соединительному концу и притягивается первым магнитом 2126, а синхронный ремень 2122 находится в заблокированном состоянии. Вращение поворотного рычага 2121 в направлении от разделительной позиции 2021 обтирочной платформы и монтажной позиции 2022 обтирочной платформы ограничено внутренней стенкой кожуха 202. Следовательно, когда электродвигатель приводит передаточный вал 2125 во вращение, поворотный рычаг 2121 может вращаться только в направлении к разделительной позиции 2021 обтирочной платформы и монтажной позиции 2022 обтирочной платформы, и, заставляя поворотный рычаг 2121 переключаться в конечном итоге из вертикального состояния в горизонтальное. Впоследствии выходной крутящий момент электродвигателя увеличивается, и когда сила воздействия, приложенная электродвигателем к первому синхронному колесу, преодолевает силу магнитного притяжения толкательного сухаря 2123 к первому магниту 2126, первое синхронное колесо приводится во вращение, и синхронный ремень 2122 вращается соответствующим образом, заставляя толкательный сухарь 2123 двигаться. Толкательный сухарь 2123 двигается в направлении от разделительной позиции 2021 обтирочной платформы к монтажной позиции 2022 обтирочной платформы, тем самым подталкивая к монтажной позиции 2022 обтирочной платформы обтирочную платформу, завершившую замену обтирочного материала и удерживаемую на поддоне 203 обтирочной платформы, расположенном на разделительной позиции 2021 обтирочной платформы. В этом случае толкательный сухарь 2123 притягивается вторым магнитом. Затем электродвигатель вращается в обратном направлении, и поворотный рычаг 2121 поворачивается в вертикальное положение.
Весь процесс, в котором базовая станция 200 согласно примеру осуществления настоящего изобретения заменяет обтирочный материал для робота-уборщика 100, представлен ниже со ссылкой на фиг. 44A-44I.
Как показано на фиг. 44A, робот-уборщик 100 готов входить на базовую станцию 200 для замены обтирочного материала. В этом случае поворотный рычаг 2121 находится в вертикальном состоянии, толкательный сухарь 2123 притягивается первым магнитом 2126, а синхронный ремень 2122 находится в заблокированном состоянии.
Как показано на фиг. 44B, робот-уборщик 100 входит на базовую станцию 200 через вход, отсоединяя модуль очистки 120 на поддон 203 обтирочной платформы, расположенный на разделительной позиции 2021 обтирочного материала.
Как показано на фиг. 44C, робот-уборщик 100 возвращается на монтажную позицию 2022 обтирочной платформы и устанавливает модуль очистки 120, предоставленный в предыдущем рабочем цикле и завершивший замену на новый обтирочный материал.
Как показано на фиг. 44D, машина робота-уборщика 100 покидает базовую станцию 200.
Как показано на фиг. 44E, согласно процессу, показанному на фиг. 37A-37L, на базовой станции 200 выполняется замена обтирочного материала на модуле очистки 120, отсоединенном от робота-уборщика 100 в данном рабочем цикле, впоследствии поддон 203 обтирочной платформы опускает модуль очистки 120 после замены чистым обтирочным материалом к разделительной позиции 2021 обтирочной платформы.
Как показано на фиг. 44F, электродвигатель приводит в действие механизм перемещения и изменения положения 212, заставляя поворотный рычаг 2121 поворачиваться из первоначально вертикального положения в горизонтальное положение.
Как показано на фиг. 44G и фиг. 44H, под действием электродвигателя первое синхронное колесо преодолевает силу магнитного притяжения толкательного сухаря 2123 к первому магниту 2126, заставляя толкательный сухарь 2123 двигаться вправо, а затем толкает модуль очистки 120 с чистым обтирочным материалом, размещенный на поддоне 203 обтирочной платформы, к монтажной позиции 2022 обтирочной платформы.
Как показано на фиг. 44I, после этого, электродвигатель вращается в обратном направлении и поворотный рычаг 2121 поворачивается в вертикальное положение.
Отсюда следует, что с помощью вышеуказанного технического решения по улучшению примера осуществления, и за счет того, что дополнительно установить на базовой станции 200 механизм перемещения и изменения положения 212 и монтажную позицию 2022 обтирочной платформы, предназначенную для временного хранения модуля очистки 120 с замененным новым обтирочным материалом, механизм перемещения и изменения положения 120 может подтолкнуть модуль очистки 120, на котором рабочий модуль 400 завершил замену обтирочного материала, из поддона 203 обтирочной платформы к монтажной позиции 2022 обтирочной платформы. Таким образом, когда робот-уборщик 100 заменяет модуль очистки 120, сначала отсоединяет грязный модуль очистки 120 на поддон 203 обтирочной платформы, затем устанавливает новый модуль очистки 120 на монтажной позиции 2022 обтирочной платформы. Следовательно, замена модуля очистки 120 завершается лишь за одно посещение базовой станции 200, что значительно повышает эффективность замены.
Следует отметить, что базовая станция 200, указанная на втором возможном варианте, отличается от базовой станции 200, указанной в первом решении согласно фиг. 37A-3737L, лишь дополнительной установкой механизма перемещения и изменения положения 212 и монтажной позиции 2022 обтирочной платформы (фактически, базовая станция 200 в первом решении включает в себя разделительную позицию 2021 обтирочной платформы), остальные конструкции по существу такие же. Можно сделать ссылку на вышеприведенное описание, что повторяться здесь не будет.
На фиг. 46A-46L показана схема процесса замены обтирочного материала робота-уборщика 100 в третьем возможном варианте базовой станции 200 согласно второму примеру осуществления настоящего изобретения. Базовая станция 200 в данном варианте немного отличается от базовых станций 200, указанных в первом варианте, показанном на фиг. 37A-3737L, и во втором варианте, показанном на фиг. 44A-44I. Разница заключается в том, что устройство 400, используемое для замены обтирочного материала для модуля очистки 120, и камера для извлечения 206 на базовой станции 200 в данном варианте, отличаются от рабочих модулей 400, указанных в вышеупомянутых двух вариантах. Что касается других сходств, можно сделать ссылку на предшествующее описание, что повторяться здесь не будет.
Кроме того, поддон 203 обтирочной платформы в данном варианте может быть таким же, как в предыдущем варианте, или отличаться от него. Когда поддон 203 обтирочной платформы имеет такую же конструкцию, как в предыдущем варианте, в кожухе 202 можно установить стопорную планку 208 соответственно. Однако, когда поддон 203 обтирочной платформы имеет отличную от предыдущего варианта конструкцию, поддон 203 обтирочной платформы может включать в себя только одну несущую пластину, подобную основной части 2031, указанной в предыдущем варианте, но не включает в себя позиционирующий элемент 2032. В этом случае, поддон 203 обтирочной платформы имеет только развернутое состояние, но не включает в себя сложенное состояние.
Поддон 203 обтирочной платформы расположен на подъемном механизме 207 и приводится подъемным механизмом 207 в движение вверх и вниз. Аналогичным образом, в настоящем варианте подъемный механизм 207 может быть таким же, как в вышеупомянутых первом и втором вариантах, или может использовать другие способы замены. Например, в данном примере осуществления, подъемный механизм 207 может быть синхронным ремнем, передаточным ремнем и другой конструкцией в форме ремня, которые вертикально расположены в кожухе 202, в кожухе 202 в местах, близком к верхнему концу и дну кожуха, расположены по одному ходовому колесу, синхронный ремень и передаточный ремень намотаны вокруг двух ходовых колес, поддон 203 обтирочной платформы закреплен в вертикальном участке с любой стороны синхронного ремня и передаточного ремня.
Как показано на фиг. 46A, в данном варианте рабочий модуль 400 может включать в себя только одну адсорбционную пластину 411 и магнитный элемент (условно не показан), установленный на дне адсорбционной пластины 411, адсорбционная пластина 411 аналогична опорной раме 401 в вышеизложенном варианте. В месте, близком к верхнему концу кожуха 202 расположен передвижной механизм 412, передвижной механизм 412 также может быть конструкцией в форме ремня, такой как синхронный ремень, передаточный ремень и т.д., намотан вокруг множества ременных шкивов и образует, по крайней мере, секцию горизонтальной тяги 4121.
Со ссылкой на фиг. 46E, адсорбционная пластина 411 неподвижно закреплена в секции горизонтальной тяги 4121 передвижного механизма 412 с помощью одного соединительного узла, при этом адсорбционная пластина 411 соединена с этим соединительным узлом с возможностью вращения. В частности, внутренняя стенка кожуха 202 базовой станции 200 рядом с верхним концом кожуха снабжена первой канавкой скольжения 413 и второй канавкой скольжения 414, который расположены горизонтально. По размерам первая канавка скольжения 413 меньше, чем вторая канавка скольжения 414, обе канавки скольжения расположены в одном и том же горизонтальном положении. Внутренняя стенка кожуха 202 еще снабжена третьей канавкой скольжения 419, а третья канавка скольжения 419 выполнена в виде горного пика и соединена со второй канавкой скольжения 414 с плавным переходом. Кроме того, третья канавка скольжения 419 соответствует положению подъемного механизма 207.
Соединительный узел включает в себя первый ролик 415, установленный в первой канавке скольжения 413 и перемещающийся в горизонтальном направлении по первой канавке скольжения 413, первую соединительную деталь 416 и вторую соединительную деталь 417, соединенные с первым роликом 415 с возможностью вращения. Первая соединительная деталь 416 неподвижно соединена с секцией горизонтальной тяги 4121 передвижного механизма 412, вторая соединительная деталь 417 соединена с адсорбционной пластиной 411 на одной стороне и снабжена вторым роликом 418 на другой стороне с возможностью вращения, второй ролик 418 может скользить во второй канавке скольжения 414 и третьей канавке скольжения 419. Способ вращательного соединения первой соединительной детали 416 и второй соединительной детали 417 с первым роликом 415 может заключаться в следующем: вторая соединительная деталь 417 выполнена в виде листа или пластины, на одной ее стороне, обращенной к первой канавке скольжения 413 снабжен, и первый ролик 415 установлен на данном с возможностью вращения. Данный торец может проходить к стороне первого ролик 415, не обращенной к первой канавке скольжения 413. Первая соединительная деталь 416 тоже выполнена в виде листа или пластины и неподвижно соединена с торцом.
Альтернативно, вторая соединительная деталь 417 снабжена круглым отверстием, совпадающим по форме и размеру с первым роликом 415, часть первого ролика 415 вставлена в данное круглое отверстие и может вращаться в нем, другая часть первого ролика находится за пределами данного круглого отверстия, но вставлена в первую канавку скольжения 413. В центре окружности первого ролика 415 можно установить, который протягивается в направлении от первой канавки скольжения 413, первая соединительная деталь 416 может быть снабжена отверстием под вал, в которое проходит.
Адсорбционная пластина 411 имеет горизонтальное и вертикальное положение. В частности, когда подъемный механизм 207 перемещает модуль очистки 120 вверх в положение рядом с адсорбционной пластиной 411, модуль очистки 120 адсорбируется к нижнему концу адсорбционной пластины 411 под воздействием силы магнитного притяжения. В этом случае второй ролик 418 расположен в третьей канавке скольжения 419, а адсорбционная пластина 411 в целом находится в горизонтальном положении. Когда передвижной механизм 412 перемещается, адсорбционная пластина 411, соединенная с секцией горизонтальной тяги 4121 передвижного механизма 412 через соединительный узел, переворачивается.
В частности, когда секция горизонтальной тяги 4121 перемещается влево, второй ролик 418, изначально находящийся в вертикальном состоянии в третьей канавке скольжения 419, вступает в левую секцию горизонтальной второй канавки скольжения 414. Следовательно, под действием ограничения второго ролика 418 и второй канавки скольжения 414, адсорбционная пластина 411 вращается вверх по часовой стрелке, что представляет собой процесс, показанный на фиг. 46D-46E.
Соответственно, когда секция горизонтальной тяги 4121 перемещается влево, второй ролик 418, изначально находящийся в вертикальном состоянии в третьей канавке скольжения 419, вступает в правую секцию горизонтальной второй канавки скольжения 414, адсорбционная пластина 411 вращается вверх против часовой стрелки, что представляет собой процесс, показанный на фиг. 46G-46H.
В данном варианте камера для извлечения 206 расположена на одном конце секции горизонтальной тяги 4121 (левая сторона, показанная на фиг. 46A-46L), на наружной стороне другого конца секции горизонтальной тяги 4121 может быть предусмотрена монтажная позиция 420 обтирочного материала. Камера для извлечения 206 имеет отверстие, обращенное к секции горизонтальной тяги 4121, верхний и нижний концы в отверстии камеры для извлечения снабжены разделительными модулями 422, а разделительный модуль 422 выполнен в обратном крючкообразном исполнении и использован для зацепления обтирочного материала, чтобы снять обтирочный материал с обтирочной платформы 1201 модуля очистки 120. Следовательно, место расположения разделительного модуля 422 соответствует разделительной позиции 4221 обтирочного материала. Монтажная позиция 420 обтирочного материала выполнена приблизительно в виде канавки, открытой внутрь, форма канавки совпадает с формой дна обтирочной платформы 1201 модуля очистки 120. Концевая часть обтирочного материала, предоставленного модулем снабжения 204, может опускаться до монтажной позиции 420 обтирочного материала. Между модулем снабжения 204 и монтажной позицией 420 обтирочного материала дополнительно предусмотрен модуль подачи 421, который включает в себя, по крайней мере, два передаточных колеса, эти два передаточных колеса периодически приближается и отдаляется, чтобы зажать обтирочный материал. Как показано на фиг. 46A, одно из передаточных колес представляет собой круглый ролик, другое передаточное колесо - кулачок. Весь процесс, в котором базовая станция 200 согласно примеру осуществления настоящего изобретения заменяет обтирочный материал для робота-уборщика 100, представлен ниже со ссылкой на фиг. 46A-46L.
Как показано на фиг. 46A, робот-уборщик 100 готов входить на базовую станцию 200 для замены обтирочного материала. В этом случае поддон 203 обтирочной платформы расположен на дне кожуха 202, второй ролик 418 расположен в третьей канавке скольжения 419, а адсорбционная пластина 411 находится в горизонтальном положении.
Как показано на фиг. 46B, робот-уборщик 100 входит на базовую станцию 200 через вход, высвобождая модуль очистки 120 на поддон 203 обтирочной платформы, и отступает на некоторое расстояние.
Как показано на фиг. 46C, подъемный механизм 207 приводит поддон 203 обтирочной платформы в движение вверх, перемещая носимый на поддоне модуль очистки 120 к адсорбционной пластине 411.
Как показано на фиг. 46D, под воздействием силы магнитного притяжения модуль очистки 120 притягивается к адсорбционной пластине 411. Подъемный механизм 207 опускается, тем самым поддон 203 обтирочной платформы возвращается на дно базовой станции 200.
Как показано на фиг. 46E, передвижной механизм 412 вращается по часовой стрелке, секция горизонтальной тяги 4121 перемещается налево. Второй ролик 418 входит в левый участок второй канавки скольжения 414 из третьей канавки скольжения 419, адсорбционная пластина 411 вращается налево на 90 град., переключая в вертикальное положение. После этого передвижной механизм 412 продолжает работать, адсорбционная пластина 411 с закрепленным модулем очистки 120 продолжает двигаться к камере для извлечения 206.
Как показано на фиг. 46F, адсорбционная пластина 411 и модуль очистки 120 входят в камеру для извлечения 206 через отверстие.
Как показано на фиг. 46G, передвижной механизм 412 вращается против часовой стрелки в обратном направлении, заставляя адсорбционную пластину 411 и модуль очистки 120 двигаться обратно. Когда модуль очистки 120 проходит через разделительный модуль 422, грязный обтирочный материал на разделительном модуле зацепляется и соскребается, а затем падает в камеру для извлечения 206.
Как показано на фиг. 46H, передвижной механизм 412 продолжает вращаться в обратном направлении, адсорбционная пластина 411 и модуль очистки 120 продолжают двигаться обратно (направо). При перемещении до положения, соответствующего третьей канавке скольжения 419, второй ролик 418 снова входит в третью канавку скольжения, и адсорбционная пластина 411 переключается в горизонтальное состояние. Сразу после этого, с вращением передвижного механизма 412 второй ролик 418 снова перемещается в правый участок второй канавки скольжения 414. Адсорбционная пластина 411 вращается направо на 90 градусов, переключаясь в вертикальное положение.
Как показано на фиг. 46I, передвижной механизм 412 продолжает приводить адсорбционную пластину 411 и модуль очистки 120 в движение направо, пока обтирочная платформа 1201 модуля очистки 120 не встанет в монтажную позицию 420 обтирочного материала. В этом случае два передаточных колеса модуля подачи 421 зажимают новый обтирочный материал, предоставленный модулем снабжения 204. Когда обтирочная платформа 1201 модуля очистки 120 установлена на монтажной позиции 420 обтирочного материала, к обтирочному материалу прикладывается сила растяжения, чтобы оборвать обтирочный материал и зажать его.
Как показано на фиг. 46J, передвижной механизм 412 приводит адсорбционную пластину 411 и модуль очистки 120 в движение в обратном направлении налево и останавливается, когда второй ролик 418 снова входит в третью канавку скольжения 419 из второй канавки скольжения 414, при этом адсорбционная пластина 411 вместе с модулем очистки 120 восстанавливается в горизонтальное состояние.
Как показано на фиг. 46K, подъемный механизм 207 приводит поддон 203 обтирочной платформы в движение вверх, снимая модуль очистки 120 с адсорбционной пластины 411; после этого приводит поддон 203 обтирочной платформы вместе с модулем очистки 120 в движение вниз до дна.
Как показано на фиг. 46L, робот-уборщик 100 входит на базовую станцию 200, устанавливает модуль очистки 120, потом покидает базовую станцию 200 и начинает операции уборки.
В данном примере осуществления способ, согласно которому адсорбционная пластина 411 и модуль очистки 120 обладает съемным магнетизмом, может заключаться в том, что магнитный элемент, расположенный на адсорбционной пластине 411, может быть электромагнитом. При необходимости адсорбции модуля очистки 120 на адсорбционной пластине 411, нужно включить питание электромагнита, чтобы создать магнитное поле. При необходимости снятия модуля очистки 120 с адсорбционной пластины 411 (этап, показанный на фиг. 46K), нужно отключить питание электромагнита, после исчезновения магнитного поля модуль очистки 120 падает на поддон 203 обтирочной платформы под действием силы тяжести.
Кроме того, модуль очистки 120 также немного отличается от модулей очистки в двух вышеуказанных вариантах. В данном примере осуществления модуль очистки 120 может включать в себя только одну обтирочную платформу 1201, которая может быть прикреплена к модулю очистки с помощью текстильной застёжки или застежки-липучки. Таким образом, на этапе, показанном на фиг. 46I, когда передвижной механизм 412 приводит в движение адсорбционную пластину 411 и модуль очистки 120, чтобы двигаться направо до тех пор, пока обтирочная платформа 1201 не будет установлена на монтажной позиции 420 обтирочного материала, обтирочная платформа 1201 может не только приложить к обтирочному материалу усилие, направленное вниз, чтобы оторвать обтирочный материал в месте слабого соединения, но также может приложить к обтирочному материалу усилие, чтобы обтирочный материал прочно приклеился к текстильной застёжке или застежке-липучке, расположенной на дне обтирочной платформы 1201.
На фиг. 47-50 изображены чертежи, связанные с третьим примером осуществления настоящего изобретения. В частности, третий пример осуществления предусматривает базовую станцию 200, предназначенную для парковки робота-уборщика 100, и систему чистки 300, использующую данную базовую станцию 200 или оборудованную данной базовой станцией. В данном примере осуществления робот-уборщик 100 может быть полностью одинаковым с роботом-уборщиком, указанным в вышеупомянутом первом и/или втором примере осуществления, что повторяться здесь не будет. Данный пример осуществления описывает процесс извлечения грязного обтирочного материала, и базовая станция 200 в основном включает в себя принимающий модуль и приемную раму 240, предназначенную для извлечения грязного обтирочного материала в принимающий модуль.
Как показано на фиг. 47, фиг. 49 и фиг. 50, в данном примере осуществления базовая станция 200 может включать в себя днище 230, предназначенное для размещения на опорной поверхности (например, полу), и приемную раму 240, установленную на днище 230 и предназначенную для приема грязного обтирочного материала, снятого с робота-уборщика 100. При этом площадь днища 230 больше, чем площадь проекции приемной рамы 240 на днище 230. Таким образом, при размещении на днище 230 приемная рама 240 занимает часть зоны верхней поверхности днища 230, и поэтому на днище 230 за пределами приемной рамы 240 образуется свободная зона для парковки робота-уборщика 100 (как показано на фиг. 47).
Приемная рама 240 может иметь полуоткрытую конструкцию и включает в себя заднюю пластину 240a, две боковые пластины 240b, расположенные противоположно и соединенные с задней пластиной 240a, и нажимную пластину 240c, расположенную с возможностями скольжения между двумя боковыми пластинами 240b и противоположно задней пластине 240a. Задняя пластина 240a и две боковые пластины 240b расположены вертикально на днище 230, две боковые пластины 240b расположены параллельно, нажимная пластина 240c зажата между двумя боковыми пластинами 240b, нажимная пластина 240c предпочтительно параллельна задней пластине 240a. Кроме того, нажимная пластина 240c может скользить вверх и вниз относительно двух боковых пластин 240b, тем самым открывая или закрывая приемную раму 240.
Как показано на фиг. 50, чтобы направлять и ограничивать скольжение вверх и вниз нажимной пластины 240c, на двух горизонтальных концах нажимной пластины 240c предусмотрены выпуклые конструкции 240d, на двух боковых пластинах 240b предусмотрены ограничительные и направляющие отверстия 240e в виде полосы, которые простираются вертикально. Выпуклые конструкции 240d вставлены в ограничительные и направляющие отверстия 240e на двух боковых пластинах 240b и могут перемещаться вверх и вниз в ограничительных и направляющих отверстиях 240e, тем самым ограничивая нажимную пластину 240c и направляя скольжение вверх и вниз.
Для того чтобы извлечь грязный обтирочный материал, снятый с робота-уборщика 100, в приемную раму 240, базовая станция 200 еще включает в себя механизм сбора обтирочного материала. Механизм сбора обтирочного материала включает в себя приводной узел, установленный в приемной раме 240, и узел сгребания, приводимый в действие приводным узлом. Узел сгребания приводится в движение приводным узлом, так что нижний конец узла сгребания имеет рабочий ход, то есть двигаться по направлению к приемной раме 240, и обратный ход, то есть двигаться по направлению от приемной рамы 240. При нахождении в рабочем ходе нижний конец узла сгребания входит в контакт с днищем 230, прижимая грязный обтирочный материал и притягивая грязный обтирочный материал, чтобы последний двинулся на днище 230 к приемной раме 240. А при нахождении в обратном ходе нижний конец узла сгребания отсоединяется от днища 230.
Как показано на фиг. 47, фиг. 49 и фиг. 50, узел сгребания может включать в себя качающийся элемент 231. Приводной узел может включать в себя электродвигатель 232, исполнительный элемент, приводимый в действие вращением электродвигателем 232. Исполнительный элемент взаимодействует с качающимся элементом 231, чтобы приводить нижний конец качающегося элемента 231 в перемещение по рабочему ходу или обратному ходу.
Приводной узел также включает в себя входной вал 233, приводимый в действие вращением электродвигателем 232, причем входной вал 233 проходит через две боковые пластины 240b приемной рамы 240 до наружной стороны боковых пластин, на двух концах входного вала установлен по одному приводному элементу соответственно. Со ссылкой на фиг. 47, электродвигатель 232 может приводить входной вал 233 во вращение за счет зацепления между ведущей шестерней и ведомой шестерней. Имеются два качающихся элемента 231, которые расположены на наружной стороне приемной рамы 240 и взаимодействуют с двумя исполнительными элементами соответственно.
В одном возможном примере осуществления узел сгребания может включать в себя только качающийся элемент 231, или качающийся элемент 231 индивидуально образует узел сгребания. При нахождении в рабочем ходе нижний конец качающегося элемента 231 может состыковаться с днищем 230, прижимая грязный обтирочный материал и притягивая грязный обтирочный материал к приемной раме 240. В этом случае нижний конец качающегося элемента 231 образует нижний конец узла сгребания.
В еще одном возможном примере осуществления узел сгребания может дополнительно включать в себя соединительную деталь 234 и толкающую пластину 235, два конца соединительной детали 234 соединены с возможностью вращения с нижними концами двух качающихся элементов 231 соответственно, толкающая пластина 235 установлена на нижнем конце соединительной детали 234 с возможностью вращения. В этом случае нижний конец качающегося элемента 235 образует нижний конец узла сгребания.
Соединительная деталь 234 выполнена приблизительно в виде горизонтально вытянутой планки, оба конца которой соответственно соединены с двумя боковыми пластинами 240b приемной рамы 240. Толкающая пластина 235 выполнена приблизительно в виде горизонтально вытянутой пластины, и для увеличения контактного трения между нижней поверхностью толкающей пластины и грязным обтирочным материалом нижняя поверхность толкающей пластины 235 может иметь вогнуто-выпуклые текстуры, протягивающиеся вдоль направления длины толкающей пластины.
Толкающая пластина 235 и соединительная деталь 234 могут быть соединены с возможностью вращения с помощью штыря. В частности, как показано на фиг. 50, нижний конец толкающей пластины 235 может образовывать один или несколько пазов, верхний конец толкающей пластины 235 может быть соответственно снабжены одним или несколькими соединительными выступами. На двух сторонах паза и в соединительном выступе имеются отверстия под штыри, в которые вставлены штыри, и в соответствующий паз застревает соединительный выступ.
Соединительная деталь 234 может перемещаться вверх и вниз относительно качающегося элемента 231, заставляя толкающую пластину 235 двигаться вверх и вниз. В частности, как показано на фиг. 48, на двух концах соединительной детали 234 установлены соединительные валы 236, на нижних концах двух качающихся элементов 231 выполнены отверстия под вал 237, протягивающиеся в вертикальном направлении, два соединительных вала 236 вставлены в два отверстия под валы 237 соответственно. Соединительный вал 236 может перемещаться вверх и вниз в отверстии под вал 237, заставляя толкающую пластину 235 двигаться.
Когда начинается рабочий ход, толкающая пластина 235 прижимает грязный обтирочный материал ко днищу 230. По мере непрерывного продолжения рабочего хода, постепенно увеличивается сила прижатия толкающей пластины 235 к грязному обтирочному материалу и днищу 230, заставляя соединительную деталь 234 перемещаться вверх. Впоследствии сила прижатия толкающей пластины 235 к грязному обтирочному материалу и днищу 230 постепенно уменьшается, и соединительная деталь 234 падает обратно. Следовательно, во всем процессе рабочего хода можно сохранять прижатие толкающей пластины 235 к грязному обтирочному материалу и днищу 230.
Между двумя качающимися элементами 231 может быть установлен направляющий элемент 238, расположенный над соединительной деталью 234, в направляющем элементе 238 выполнено направляющее отверстие 238a, и в направляющее отверстие 238a вставлен направляющий штифт 239 с возможностью перемещения, нижний конец направляющего штифта 239 неподвижно соединен с соединительной деталью 234. Когда толкающая пластина 235 перемещается по днищу 230, подталкивая соединительную деталь 234 к перемещению вверх и вниз относительно качающегося элемента 231, направляющий штифт 239 может перемещаться вверх и вниз в направляющем отверстии 238a, тем самым направляя и регулируя перемещение соединительной детали 234 и толкающей пластины 235 вверх и вниз.
Для повышения силы прижатия к грязному обтирочному материалу и днищу 230, в еще одном примере осуществления можно установить эластичный элемент 241, чтобы подтолкнуть соединительную деталь 234 и толкающую пластину 235. Между направляющим элементом 238 и соединительной деталью 234 установлен эластичный элемент 241, находящийся в сжатом состоянии. Таким образом, во время рабочего хода по мере перемещения вверх и вниз соединительной детали 234 относительно качающегося элемента 231, смещено установленный эластичный элемент 241 может прикладывать направленные вниз силы упругого действия в различной степени к соединительной детали 234, чтобы дополнительно повысить силу, с которой толкающая пластина 235 прижимает к грязному обтирочному материалу и днищу 230, тем самым избегая случая, когда грязный обтирочный материал не притягивался толкающей пластиной 235 из-за малой силы прижатия, приложенной толкающей пластиной 235, и обеспечивая, что сбор грязного обтирочного материала может беспрепятственно перемещаться к приемной раме 240.
Между толкающей пластиной 235 и соединительной деталью 234 может быть установлена пружина кручения, сила скручивания, приложенная пружиной кручения к толкающей пластине 235, заставляет конец толкающей пластины 235 рядом с приемной рамой 240 иметь тенденцию к вращению в сторону днища 230. Таким образом, под силой скручивания, приложенной пружиной кручения, конец толкающей пластины 235 рядом с приемной рамой 240 всегда имеет тенденцию к вращения вниз. Следовательно, когда толкающая пластина 235 начинает переключаться с нисходящего хода на рабочий ход, левый конец толкающей пластины 235 первым входит в контакт с грязным обтирочным материалом и днищем 230, и по мере того, как толкающая пластина 235 продолжает опускаться, толкающая пластина 235 вращается, используя свой конец, входящий в контакт с днищем 230, в качестве опорной точки, пока нижняя поверхность толкающей пластины полностью не войдет в контакт с грязным обтирочным материалом и днищем 230. Таким образом, за счет того, что толкающая пластина 235 постепенно входит в контакт и прижать к грязному обтирочному материалу и днищу 230, можно улучшить эффект сжатия толкающей пластины 235 к грязному обтирочному материалу.
Нажимная пластина 240c приемной рамы 240 была выполнена с возможностью открываться, когда толкающая пластина 235 перемещается до конца рабочего хода. Нижний конец нажимной пластины 240c может образовывать клиновидную наклонную поверхность, обращенную к толкающей пластине 235, и конец толкающей пластины 235, обращенный к клиновидной наклонной поверхности, является клиновидным концом. Клиновидная наклонная поверхность может быть образована путем наклона частичной нижней торцевой поверхности нажимной пластины 240c к толкающей пластине 235, а клиновидный конец может быть острым концом, площадь поперечного сечения которого постепенно уменьшается в направлении рабочего хода. Когда толкающая пластина 235 перемещается к клиновидному концу по рабочему ходу и стыкуется с клиновидной наклонной поверхностью, нажимная пластина 240c может толкаться клиновидным концом и скользить вверх, тем самым открывая приемную раму 240, и грязный обтирочный материал, прижитый к нижнему концу толкающей пластины 235, входит в приемную раму 240 через открытое отверстие. Когда рабочий ход завершен, толкающая пластина 235 перемещается вверх, чтобы достичь обратного хода. В этом случае нажимная пластина 240c может упасть под действием силы собственной тяжести, чтобы нижний конец нажимной пластины упирался на днище 230, тем самым нажимая на грязный обтирочный материал и заставляя грязный обтирочный материал оставаться в текущем положении, чтобы избежать смещения грязного обтирочного материала из-за внешних факторов (например, ветра или воздушного потока).
Как показано на фиг. 48, в одном примере осуществления на качающемся элементе 231 расположена поворотная часть 242, на боковой пластине 240b приемной рамы 240 расположена согласующаяся часть 243. Поворотная часть 242 может быть длинной канавкой скольжения, установленной на качающемся элементе 231 и проходящей в направлении длины качающегося элемента 231, согласующаяся часть 243 может быть направляющим узлом, закрепленным на боковой пластине 240b приемной рамы 240. Направляющий узел вставлен в длинную канавку скольжения и может вращаться и скользить в длинной канавке скольжения. Исполнительный элемент включает в себя эксцентрическую конструкцию, которая соединена с верхним концом качающегося элемента 231 с возможностью вращения.
Эксцентрическая конструкция может быть эксцентрическим колесом 244, эксцентрическое колесо 244 и входной вал 233 установлены эксцентрически. На верхнем конце качающегося элемента 231 может быть установлено колесное кольцо 245, эксцентрическое колесо 244 установлено в колесном кольце 245. Альтернативно, эксцентрическая конструкция также может быть шатуном, направление выступа шатуна вертикально осевому направлению входного вала 233, верхний конец качающегося элемента 231 и шатун соединены с возможностью вращения.
Как показано на фиг. 49, входной вал 233 приводит во вращение эксцентрическую конструкцию, которая может приводить во вращение верхний конец качающегося элемента 231, вращательно соединенного с эксцентрической конструкцией, вокруг оси входного вала 233, траектория вращения верхнего конца качающегося элемента 231 представляет собой круг. В связи с тем, что положение в качающемся элементе 231 близко к его середине ограничено поворотной частью и 242 и согласующейся частью 243, качающийся элемент 231 вращается с местом соединения поворотной части 242 с согласующейся частью 243 в качестве опорной точки, так что нижний конец качающегося элемента может качаться. Следовательно, соединительная деталь 234 на нижнем конце качающегося элемента 231 и толкающая пластина 235 приводятся в движение соответствующим образом.
Ниже описывается процесс работы настоящего примера осуществления:
Толкающая пластина 235 узла сгребания изначально находится в поднятом положении, после работы робот-уборщик входит на базовую станцию 200, высвобождая грязный обтирочный материал на днище 230 базовой станции 200.
Затем электродвигатель 232 приводит входной вал 233 во вращение по часовой стрелке, и под действием эксцентрической конструкции толкающая пластина 235 постепенно перемещается вниз, пока грязный обтирочный материал не будет прижат.
Электродвигатель 232 продолжает приводить входной вал 233 во вращение по часовой стрелке, толкающая пластина 235 приводится в движение по направлению рабочего хода, перетаскивая грязный обтирочный материал до тех пор, пока клиновидный конец толкающей пластины 235 не стыкуется с клиновидной наклонной поверхностью нажимной пластины 240c приемной рамы 240. По мере движения толкающей пластины 235 нажимная пластина 240c отталкивается, грязный обтирочный материал подается в приемную раму 240.
Толкающая пластина 235 перемещается до конца рабочего хода, под действием электродвигателя 232 входной вал 233 продолжает вращаться по часовой стрелке, толкающая пластина 235 начинается подниматься и двигаться назад, пока клиновидный конец не отсоединится от клиновидной наклонной поверхности. Нажимная пластина 240c перемещается вниз под действием силы тяжести, нажимая грязный обтирочный материал, и часть грязного обтирочного материала попадает в приемную раму 240.
Под действием электродвигателя 232 входной вал 233 продолжает вращаться по часовой стрелке, толкающая пластина 235 перемещается по обратному ходу. Вышеуказанный процесс повторяется, пока грязный обтирочный материал полностью не попадет в приемную раму 240.
Как показано на фиг. 49 и фиг. 50, в еще одном примере осуществления на боковой пластине 240b приемной рамы 240 установлен скользящий элемент 246, перемещающийся по направлению рабочего хода или по направлению обратного хода, между скользящим элементом 246 и боковой пластиной 240b установлен первый элемент сброса 247, и сила сброса, прилагаемая первым элементом сброса 247 к скользящему элементу 246, заставляет скользящему элементу иметь тенденцию перемещаться по направлению обратного хода. На боковой пластине 240b приемной рамы 240 установлен направляющий хомут 248, скользящий элемент 246 вставлен в направляющий хомут 248 и ограничен направляющим хомутом 248 по вертикальному направлению, так что скользящий элемент 246 может горизонтально перемещаться на боковой пластине 240b.
На скользящем элементе 246 выполнен паз 246a, и в пазе 246a установлен первый подвесной элемент 246b. На наружной стенке боковой пластины 240b может быть установлен второй подвесной элемент 240f. Первый элемент сброса 247 может быть пружиной, на двух концах пружины могут быть установлены первый подвесной элемент 246b и второй подвесной элемент 240f. Первый подвесной элемент 246b может быть конструкцией штыря, вертикально установленной в пазе 246a, второй подвесной элемент 240f может быть выступной конструкцией, установленной на наружной стенке боковой пластины 240b. Первый элемент сброса 247 находится в растянутом состоянии, прилагая силу растяжения к скользящему элементу 246 в направлении обратного хода.
Качающийся элемент 231 установлен с возможностью скольжения на боковой пластине 240b, качающийся элемент 231 и скользящий элемент 246 закреплены между собой в направлении рабочего хода или направлении обратного хода. Между качающимся элементом 231 и скользящим элементом 246 предусмотрен второй элемент сброса 249, и сила сброса, прилагаемая вторым элементом сброса 249 к качающемуся элементу 231, заставляет качающему элементу иметь тенденцию к движению в направлении от днища 230.
Как показано на фиг. 50, на наружной стенке верхнего конца качающегося элемента 231 установлен третий подвесной элемент 231a, на наружной стенке нижнего конца скользящего элемента 246 установлен четвертый подвесной элемент 246c, второй элемент сброса 249 является пружиной, на двух концах которой подвешены третий подвесной элемент 231a и четвертый подвесной элемент 246c соответственно. При этом, третий подвесной элемент 231a может быть выступной конструкцией, расположенной на наружной стенке качающегося элемента 231, четвертый подвесной элемент 246c может быть крючкообразной конструкцией, расположенной на наружной стенке скользящего элемента 246. Второй элемент сброса 249 находится в растянутом состоянии, прилагая силу растяжения к качающему элементу 231 вверх.
На внутренней боковой стенке скользящего элемента 246 расположена направляющая канавка скольжения 246d, идущая вертикально, качающийся элемент 231 вставлен в направляющую канавку скольжения 246d и ограничен направляющей канавкой скольжения 246d в горизонтальном направлении.
На качающемся элементе 231 расположена первая канавка отслеживания контура 231c, а исполнительный элемент включает в себя первый кулачок 224, расположенный в первой канавке отслеживания контура 231c. Под действием входного вала 233 первый кулачок 224 вращается в первой канавке отслеживания контура 231c. Можно приводить в движение качающийся элемент 231 за счет стыковки с поверхностью первой канавки отслеживания контура 231c, и под действием первого элемент сброса 247 и второго элемента сброса 249 осуществить сброс качающегося элемента 231, тем самым осуществляя циркуляционное движение качающегося элемента 231.
Качающийся элемент 231 в целом имеет форму перевернутой буквы «F» и включает в себя стержень 231d, первую протягивающуюся часть 231e, установленную на стержне 231d. Правая поверхность стержня 231d и нижняя поверхность первой протягивающейся части 231e определяют первую канавку отслеживания контура 231c. Стержень 231d вставлен в направляющую канавку скольжения 246d, первая протягивающаяся часть 231e расположена под скользящим элементом 246. Качающийся элемент 231 дополнительно включает в себя вторую протягивающуюся часть 231b, расположенную на нижнем конце стержня 231d, соединительная деталь 234 расположена с возможностью вращения на конце второй протягивающейся части 231b.
Первый кулачок 224 включает в себя две плоские поверхности отслеживания контура, расположенные противоположно, и две дугообразные поверхности отслеживания контура, плавно переходящие с двумя плоскими поверхностями отслеживания контура, место соединения первого кулачка 224 с входным валом 233 расположено в центре окружности одной из дугообразных поверхностей отслеживания контура. Первая канавка отслеживания контура 231c включает в себя дугообразную поверхность с плавным переходом, соединившую правую поверхность стержня 231d с нижней поверхностью первой протягивающейся части 231e, крутизна дугообразной поверхности с плавным переходом совпадает с крутизной дугообразной поверхности отслеживания контура. Дугообразная поверхность отслеживания контура рядом с точкой соединения первого кулачка 224 с входным валом 233 образует место с наименьшей потенциальной энергией первого кулачка 224. Соответственно, дугообразная поверхность отслеживания контура, расположенная вдали от точки соединения первого кулачка 224 с входным валом 233, образует место с наивысшей потенциальной энергией первого кулачка 224.
Когда толкающая пластина 235 находится в рабочем ходе, место с наименьшей потенциальной энергией первого кулачка 224 вращается на дугообразной поверхности с плавным переходом, место с наивысшей потенциальной энергией первого кулачка 224 скользит на правой поверхности стержня 231d. Нижняя поверхность первой протягивающейся части 231e контактируется с местом с наименьшей потенциальной энергией первого кулачка 224, так что качающийся элемент 231 расположен в самом нижнем положении. Таким образом, соединительная деталь 234 на нижнем конце качающегося элемента 231 и толкающая пластина 235 могут прижиматься ко днищу 230. Между тем, место с наивысшей потенциальной энергией первого кулачка 224 скользит на правой поверхности стержня 231d, расстояние между точками соединения качающегося элемента 231 с входным валом 233 постепенно увеличивается. В связи с тем, что входной вал 233 закреплен относительно приемной рамы 240, так что качающийся элемент 231 постепенно удаляется от входного вала 233. Таким образом, соединительная деталь 234 на нижнем конце качающегося элемента 231 и толкающая пластина 235 перемещаются к приемной раме 240. Следовательно, толкающая пластина 235 прижимает грязный обтирочный материал ко днищу 230, качающийся элемент 231 толкается первым кулачком 224, заставляя толкающую пластину 235 перемещаться к приемной раме 240, тем самым осуществляя извлечение грязного обтирочного материала.
Когда толкающая пластина 235 находится в обратном ходе, место с наименьшей потенциальной энергией первого кулачка 224 скользит на правой поверхности стержня 231d, место с наивысшей потенциальной энергией первого кулачка 224 скользит на нижней поверхности первой протягивающейся части 231e. Нижняя поверхность первой протягивающейся части 231e контактируется с местом с наивысшей потенциальной энергией первого кулачка 224, так что качающийся элемент 231 расположен в самом высоком положении. Таким образом, соединительная деталь 234 на нижнем конце качающегося элемента 231 и толкающая пластина 235 поднимаются, удаляя от днища 230. В этом случае, место с наименьшей потенциальной энергией первого кулачка 224 скользит на правой поверхности стержня 231d, то под действием первого элемента сброса 247 скользящий элемент 246 и качающийся элемент 231 притягиваются и перемещаются по направлению обратного хода, а соединительная деталь 234 и толкающая пластина 235, расположенные на нижнем конце качающегося элемента 231, тоже перемещаются по направлению обратного хода. Следовательно, толкающая пластина 235 поднимается выше, чем днище 230, и под действием первого элемента сброса 247 качающийся элемент 231, соединительная деталь 234 и толкающая пластина 235, расположенные на нижнем конце качающегося элемента 231 приводятся в перемещение по направлению обратного хода, осуществляя возврат качающегося элемента 231.
На поверхности нажимной пластины 240c, обращенной к направлению обратного хода, сформирована вторая канавка отслеживания контура 240g. На входном валу 233 расположен второй кулачок 225, размещенный на второй канавке отслеживания контура 240g, причем место с наивысшей потенциальной энергией второго кулачка 225 и место с наивысшей потенциальной энергией первого кулачка 224 расположены на двух сторонах входного вала 233.
Вторая канавка отслеживания контура 240g включает в себя поверхность, обращенная к направлению обратного хода (далее - передняя боковая поверхность), и нижнюю поверхность. В связи с тем, что место с наивысшей потенциальной энергией второго кулачка 225 и место с наивысшей потенциальной энергией первого кулачка 224 расположены на двух сторонах входного вала 233, когда толкающая пластина 235 находится в рабочем ходе, место с наивысшей потенциальной энергией первого кулачка 224 расположено внизу, при этом место с наивысшей потенциальной энергией второго кулачка 225 расположено наверху, стыкуясь с нижней поверхностью второй канавки отслеживания контура 240g, под действием второго кулачка 225 нажимная пластина 240c открывается и находится в открытом состоянии, следовательно, грязный обтирочный материал притягивается толкающей пластиной 235 и входит в приемную раму 240.
Когда толкающая пластина 235 находится в обратном ходе, место с наивысшей потенциальной энергией первого кулачка 224 расположена наверху, при этом место с наивысшей потенциальной энергией второго кулачка 225 расположена внизу, то есть место с наименьшей потенциальной энергией второго кулачка 225 стыкуется с нижней поверхностью второй канавки отслеживания контура 240g и, следовательно, нажимная пластина 240c падает под действием силы собственной тяжести, нажимая при этом грязный обтирочный материал.
На фиг. 51-56 изображены чертежи, связанные с четвертым примером осуществления настоящего изобретения. В частности, четвертый пример осуществления предусматривает базовую станцию 200, способную автоматически извлечь грязный обтирочный материал, отсоединенный от робота-уборщика 100, и включающую в себя: станину 11, разделительную позицию 13 обтирочного материала, расположенную на станине 11 и предназначенную для отсоединения обтирочного материала от робота-уборщика 100, принимающий модуль 15, расположенный на станине 11 и предназначенный для приема обтирочного материала, передаточное устройство 17, расположенное на станине 11, захватный механизм 19, расположенный на передаточном устройстве 17, и приводной механизм, предназначенный для привода передаточного устройства 17. Захватный механизм 19 имеет первое рабочее состояние, при котором захватный механизм перемещается между принимающим модулем 15 и разделительной позицией 13 обтирочного материала, второе рабочее состояние, при котором захватный механизм захватывает обтирочный материал на разделительной позиции 13 обтирочного материала, и третье рабочее состояние, при котором захватный механизм высвобождает обтирочный материал на принимающем модуле 15. Приводной механизм приводит в действие передаточное устройство 17, чтобы заставить захватный механизм 19 перемещаться между разделительной позицией обтирочного материала 13 и принимающим модулем 15, а затем переключаться между первым рабочим состоянием, вторым рабочим состоянием и третьим рабочим состоянием.
Во время работы после того как обтирочный материал завершает мытье полов, робот-уборщик 100 может припарковаться на разделительной позиции 13 обтирочного материала и высвободить обтирочный материал на разделительной позиции 13 обтирочного материала. Приводной механизм приводит в действие передаточное устройство 17, чтобы заставить захватный механизм 19 перемещаться между разделительной позицией 13 обтирочного материала и принимающим модулем 15, а затем переключаться между первым рабочим состоянием, вторым рабочим состоянием и третьим рабочим состоянием. Захватный механизм 19 захватывает обтирочный материал на разделительной позиции 13 обтирочного материала и перемещает обтирочный материал до принимающего модуля 15, открывается в направлении принимающего модуля 15, высвобождая обтирочный материал на принимающий модуль 15. Таким образом, осуществляется автоматическое извлечение обтирочного материала, в этом процессе не требуется снятие пользователем обтирочного материала вручную, избегая ручного вмешательства.
Станина 11 включает в себя первую раму 41 и вторую раму 43, расположенные вертикально, первая рама 41 и вторая рама 43 в целом выполнены в виде прямоугольника и образуют первое отверстие и второе отверстие соответственно, робот-уборщик 100 может пересечь первое отверстие и станину 11, входит во второе отверстие.
Разделительная позиция 13 обтирочного материала и принимающий модуль 15 расположены между первой рамой 41 и второй рамой 43, разделительная позиция 13 обтирочного материала расположена на дне станины 11 и представляет собой место для парковки робота-уборщика 100 и приема высвобожденного обтирочного материала. Принимающий модуль 15 расположен над разделительной позицией 13 обтирочного материала, с открытым верхним концом для сбора грязных обтирочных материалов.
Передаточное устройство 17 включает в себя первую передаточную часть 37 и вторую передаточную часть 39, а первая передаточная часть 37 включает в себя множество первых синхронных колес 45, расположенных на первой раме 41, и первый синхронный ремень 49, окружающий множество первых синхронных колес 45. Приводной механизм соединен с первыми синхронными колесами 45 для приведения во вращение первых синхронных колес 45. Приводной механизм может быть электродвигателем.
На станине 11 установлен контроллер, соединенный с приводным механизмом и предназначенный для приема сигнала от робота-уборщика 100 и управления приводным механизмом в соответствии с сигналом от робота-уборщика 100. Сигнал, отправляемый роботом-уборщиком 100, может быть сигналом о замене обтирочного материала, и когда робот-уборщик 100 отправляет контроллеру сигнал о замене обтирочного материала, контроллер управляет приводным механизмом, чтобы приводной механизм приводил передаточное устройство в действие. В других вариантах реализации контроллер соединен с захватным механизмом 19, чтобы управлять захватным механизмом для выполнения отсоединения и прикрепления. Контроллер представляет собой управляющий электромагнит.
На первой раме 41 установлено множество третьих вращающихся валов 53, соответствующих множеству первых синхронных колес 45, каждое первое синхронное колесо 45 неподвижно установлено на соответствующем третьем вращающемся валу 53, таким образом за счет вращения третьего вращающегося вала 53 приводится во вращение первое синхронное колесо 45, тем самым приводя во вращение первый синхронный ремень 49.
Аналогичным образом, со ссылкой на вышеприведенное описание о первой передаточной части 37, вторая передаточная часть 39 включает в себя множество вторых синхронных колес 47, расположенных на второй раме 43, и второй синхронный ремень 51, окружающий множество вторых синхронных колес 47. Приводной механизм соединен со вторыми синхронными колесами 47 для приведения во вращение вторых синхронных колес 47.
На второй раме 43 установлено множество четвертых вращающихся валов 55, соответствующих множеству вторых синхронных колес 47, каждое второе синхронное колесо 47 неподвижно установлено на соответствующем четвертом вращающемся валу 55. Таким образом за счет вращения четвертого вращающегося вала 55 второе синхронное колесо 47 приводится во вращение, тем самым приводя во вращение второй синхронный ремень 51.
Захватный механизм 19 включает в себя первый вращающийся вал 31 и второй вращающийся вал 33, установленные противоположно, первый захват 21 и второй захват 23, установленные соответственно на первом вращающемся валу 31 и втором вращающемся валу 33, причем первый захват 21 и второй захват 23 могут соответственно вращаться вокруг направления прохождения первого вращающегося вала 31 и второго вращающегося вала 33, два конца первого вращающегося вала 31 и два конца второго вращающегося вала 33 соединены соответственно с первым синхронным ремнем и вторым синхронным ремнем передаточного устройства 17. Между первым захватом 21 и вторым захватом 23 расположена пружина кручения 35, под действием пружины кручения 35 первый захват 21 и второй захват 23 разделены друг от друга, заставляя захватный механизм 19 находиться в открытом состоянии.
На одном конце первого захвата 21, удаленном от первого вращающегося вала 31, установлен для присоединения со вторым захватом 23. Когда захватный механизм 19 находится в открытом состоянии, расстояние между магнитами первого захвата 21 и второго захвата 23 большое, сила пружины кручения 35 больше, чем сила магнитного поля между первым захватом 21 и вторым захватом 23, и захватный механизм 19 может оставаться в открытом состоянии. Когда захватный механизм 19 находится в закрытом состоянии, расстояние между магнитами первого захвата 21 и второго захвата 23 большое, сила магнитного поля между первым захватом 21 и вторым захватом 23 больше, чем сила пружины кручения 35, и захватный механизм 19 может оставаться в закрытом состоянии и обеспечивает зажимное усилие.
Как показано на фиг. 54, на станине 11 установлена первая направляющая часть 27, расположенная на стороне разделительной позиции 13 обтирочного материала и предназначенная для приложения усилия ко второму захвату 23, чтобы второй захват 23 смог вращаться относительно первого захвата 21 и прикрепиться к первому захвату 21, зажимая обтирочный материал. После того, как робот-уборщик 100 припарковался на разделительной позиции 13 обтирочного материала и высвободил обтирочный материал, под действием приводного механизма первое синхронное колесо 45 и второе синхронное колесо 47 приводят соответственно первый синхронный ремень 49 и второй синхронный ремень 51 во вращение против часовой стрелки, а захватный механизм 19 перемещается вниз. А когда второй захват 23 перемещается и входит в контакт с первой направляющей частью 27, первая направляющая часть 27 прилагает усилие ко второму захвату 23, а второй захват 23 вращается против часовой стрелки, затем прикрепляется к магниту на первом захвате 21, захватывая обтирочный материал.
Первая направляющая часть 27 представляет собой первую канавку, обращенную вверх, когда второй захват 23 перемещается и входит в контакт с внутренней стенкой первой канавки, внутренняя стенка первой канавки прилагает силу сопротивления ко второму захвату 23. По мере вращения передаточного устройства 17, под действием силы сопротивления второй захват 23 вращается вокруг второго вращающегося вала 33, затем прикрепляется к магниту на первом захвате 21, захватывая обтирочный материал.
На станине 11 установлена вторая направляющая часть 29, расположенная на стороне принимающего модуля 15 и предназначенная для приложения усилия ко второму захвату 23, чтобы второй захват 23 смог вращаться относительно первого захвата 21 и отсоединиться от первого захвата 21, высвобождая обтирочный материал. В частности, после того, как первый захват 21 прикрепился ко второму захвату 23 и захватил обтирочный материал, под действием приводного механизма передаточное устройство 17 вращается по часовой стрелке, заставляя захватный механизм 19 перемещаться вверх. Когда захватный механизм перемещается прямо напротив второй направляющей частью 29, вторая направляющая часть 29 прилагает усилие ко второму захвату 23, а второй захват 23 вращается по часовой стрелке, отсоединяясь от магнита на первом захвате 21, высвобождая обтирочный материал.
Вторая направляющая часть 29 представляет собой стержень, способный просунуться между первым захватом 21 и вторым захватом 23 и предназначенный для стыковки со вторым захватом 23. Когда захватный механизм 19 перемещается к стержню под действием передаточного устройства 17, стержень просовывается между первым захватом 21 и вторым захватом 23, прилагая усилия ко второму захвату 23. По мере продолжения вращения передаточного устройства 17, под действием стержня второй захват 23 вращается вокруг второго вращающегося вала 33, затем отсоединяется от магнита на первом захвате 21, так что обтирочный материал может упасть на принимающий модуль 15 под действием силы тяжести.
На первом захвате 21 расположена вторая канавка для прохождения стержня, вторая канавка обращена ко второму захвату 23. Вторая канавка может направлять стержень перемещаться ко второму захвату 23, обеспечивая отсоединение второго захвата 23 от первого захвата 21.
На фиг. 57-63 изображены чертежи, связанные с пятым примером осуществления настоящего изобретения. Пятый пример осуществления предусматривает базовую станцию 200, предназначенную для парковки робота-уборщика 100, и систему чистки 300, оборудованную данной базовой станцией 200. Базовая станция 200 может автоматически заменять обтирочный материал, такой как обтирочная салфетка или обтирочная ткань, для робота-уборщика 100, тем самым уменьшая вмешательство пользователя и улучшая пользовательский опыт.
Базовая станция 200 включает в себя: основной ремень 216, множество обтирочных материалов, распределенных вдоль основного ремня 216 и расположенных с возможностью разделения на основном ремне 216, передвижной механизм, предназначенный для приведения основного ремня 216 в перемещение, рабочую позицию 218 обтирочного материала, предназначенную для замены обтирочного материала робота-уборщика 100. На основном ремне 216, расположенном на рабочей позиции 218 обтирочного материала, образуется свободная зона 222 после того, как робот-уборщик 100 робота-уборщика уносит обтирочный материал, расположенный в основной полосе. После того, как свободная зона 222 принимает обтирочный материал 21b, высвобожденный от робота-уборщика 100, передвижной механизм может перемещать основной ремень 216, чтобы другой обтирочный материал 21a находился на рабочей позиции 218 обтирочного материала.
Базовая станция 200, предусмотренная в данном примере осуществления, оборудована основным ремнем 216, приводимым в перемещение передвижным механизмом, и рабочей позицией 218 обтирочного материала, предназначенный для замены обтирочного материала для робота-уборщика 100, так что робот-уборщик 100 поступает на рабочую позицию 218 обтирочного материала при необходимости замены обтирочного материала, помещая использованный обтирочный материал 21b в свободной зоне 222 на основном ремне 216, основной ремень 216 приводится в действие передвижным механизмом, переключая используемый обтирочный материал 21a на рабочую позицию 218 обтирочного материала, робот-уборщик 100 поменяет на используемый обтирочный материал 21a, после этого завершается автоматическая замена обтирочного материала. Следовательно, предусмотренная в данном примере осуществления базовая станция 200 позволяет облегчить автоматическую замену обтирочного материала, тем самым уменьшая вмешательства пользователя в замене обтирочного материала и улучшая пользовательский опыт.
К поверхности основного ремня 216 прикреплено множество обтирочных материалов, которые размещаются вдоль направления прохождения основного ремня 216. Основной ремень 216 выполнен в плоском исполнении и изготовлен из тканевого материала или бумажного материала. Основной ремень 216 проходит через рабочую позицию 218 обтирочного материала, перенося обтирочный материал на рабочую позицию 218 обтирочного материала в виде обращенного к роботу-уборщику 100. Робот-уборщик 100 поступает на рабочую позицию 218 обтирочного материала, не мешая перемещению основного ремня 216. Основной ремень 216 может переносить и передавать обтирочный материал, и в процессе перенесения обтирочный материал может остановиться на рабочей позиции 218 обтирочного материала, чтобы робот-уборщик 100 выполнил замену.
На основном ремне 216 могут быть непрерывно расположены обтирочные материала, и соседние обтирочные материалы не соединены друг с другом. Два соседних обтирочных материала разнесены на определенное расстояние или близки друг к другу. Предпочтительно, множество обтирочных материалов расположены с интервалами на основном ремне 216 и распределены в форме точки разрыва. Множество обтирочных материалов прикрепляются к поверхности основного ремня 216 с интервалами вдоль направления длины основного ремня 216, соседние обтирочные материалы имеют равные промежутки. Заранее установленное расстояние между соседними обтирочными материалами позволяет обеспечить, что к основному ремню 216, расположенному на рабочей позиции 218 обтирочного материала, прикрепляется только один обтирочный материал, чтобы робот-уборщик 100 заменил обтирочный материал. Как показано на фиг. 61, после уноса обтирочного материала основной ремень 216, расположенный на рабочей позиции 218 обтирочного материала, находится в пустом состоянии, в свободной зоне 222 отсутствует обтирочный материал. Свободная зона 222, расположенная на рабочей позиции 218 обтирочного материала, находится в неподвижном состоянии до тех пор, пока не примет использованный обтирочный материал 21b, а другой используемый обтирочный материал 21a все еще намотан на второй рулон 227 и хранится там, чтобы избежать заранее развертывания используемого обтирочного материала 21a на воздухе, что может оказать отрицательное влияние на эффект очистки. Соответственно, использованный обтирочный материал 21b наматывается на первый рулон 226 для сбора.
Множество обтирочных материалов последовательно перемещаются на рабочую позицию 218 обтирочного материала вдоль направления перемещения основного ремня 216, переключаясь и перемещаясь до рабочей позиции 218 обтирочного материала без повторения. Таким образом, обеспечивается замена обтирочного материала неиспользованным обтирочным материалом для робота-уборщика 100 для эффективной уборки полов.
На базовой станции 200 имеется специальное пространство для хранения, где могут быть уложены стопкой используемые обтирочные материалы 21a, при прохождении через данное пространство для хранения основной ремень 216 уносит обтирочный материал последовательно. В качестве альтернативы, основной ремень 216 может сложиться и храниться в данном пространстве для хранения, за счет вытягивания первого рулона 226 основной ремень 216 уносит обтирочный материал и выходит из данного пространства для хранения.
Базовая станция 200 имеет первую часть хранения, предназначенную для хранения используемого обтирочного материала 21a, и вторую часть хранения, предназначенную для хранение обтирочного материала, отсоединенного от робота-уборщика 100. Обтирочный материал перемещается из первой части хранения на рабочую позицию 218 обтирочного материала через основной ремень 216, переносится роботом-уборщиком 100 и отсоединяется от него на рабочей позиции 218 обтирочного материала, после этого перемещается во вторую часть хранения. За счет установки второй части хранения осуществляется автоматический сбор использованных обтирочных материалов 21b.
Передвижной механизм включает в себя первый рулон 226, способный вращаться для наматывания основного ремня 216, тем самым приводя основной ремень 216 в перемещение. Первый рулон 226 наматывается с основным ремнем 216 и тем самым заставить основной ремень 216 перемещаться, за счет перемещения основного ремня 216 можно передать использованный обтирочный материал 21b в назначенную зону или назначенное пространство для хранения.
За счет наматывания на первый рулон 226 использованного обтирочного материала 21b образуется вышеуказанная вторая часть хранения, осуществляется автоматический сбор использованных обтирочных материалов 21b, тем самым уменьшая вмешательство пользователя. Наряду с наматыванием основного ремня 216 первый рулон 226 наматывает на себя и обтирочный материал, расположенный на основном ремне 216, тем самым осуществляя сбор использованного обтирочного материала 21b. За счет наличия первого рулона 226 и сочетания наматывания основного ремня 216 со сбором использованного обтирочного материала 21b, осуществляется автоматический сбор использованных обтирочных материалов 21b, такая конструкция проста и удобна для изготовления.
Базовая станция 200 дополнительно включает в себя второй рулон 227, который может наматывать на себя основной ремень 216 и используемый обтирочный материал 21a. Первый рулон 226 наматывает на себя основной ремень 216, приводя второй рулон 227 в синхронное высвобождение основного ремня 216. По мере высвобождения основного ремня 216 используемый обтирочный материал 21a вместе с основным ремнем 216 входит на рабочую позицию 218 обтирочного материала, чтобы робот-уборщик 100 заменил обтирочный материал. Таим образом, можно сочетать функцию сбора использованного обтирочного материала 21b с функцией подачи используемого обтирочного материала 21a, обеспечивая успешную автоматическую замену роботом-уборщиком 100 обтирочного материала. Второй рулон 227 наматывает на себя используемый обтирочный материал 21a для образования вышеуказанной первой части хранения.
Во время использования часть основного ремня 216 наматывается на первый рулон 226, часть основного ремня 216 может намотаться на второй рулон 227. В исходном состоянии большая часть или все обтирочные материалы были намотаны на второй рулон 227, на первый рулон 226 была намотана только часть длины основного ремня 216 или на первом рулоне 226 неподвижно закреплен только один конец основного ремня 216, на первый рулон не был намотан основной ремень 216. Один обтирочный материал расположен на рабочей позиции 218 обтирочного материала или был предварительно установлен на обтирочной платформе робота-уборщика 100. Когда робот-уборщик 100 заменяет обтирочный материал, обтирочные материалы, расположенные на основном ремне 216, подаются последовательно роботу-уборщику 100.
Основной ремень 216 наматывается на первый рулон 226 или второй рулон 227 слой за слоем, между соседними слоями основного ремня 216 образуется пространство для прикрепления обтирочного материала. Таким образом, основной ремень 216 может использоваться в качества передаточного элемента для приведения второго рулона 227 во вращение, высвобождая используемый обтирочный материал 21a на рабочую позицию 218 обтирочного материала, можно также осуществить автоматический сбор использованных обтирочных материалов 21b.
Один конец основного ремня 216 закреплен на первом рулоне 226, другой конец закреплен на втором рулоне 227. Первый рулон 226 приводится во вращение, приводя во вращение и второй рулон 227 с помощью основного ремня 216. На базовой станции 200 установлен приводной механизм, например, электродвигатель, чтобы приводить первый рулон 226 во вращение.
Базовая станция 200 включает в себя кожух, в котором установлены первый рулон 226 и второй рулон 227 таким образом, что их вращающиеся валы параллельны, и рабочая позиция 218 обтирочного материала расположена внутри кожуха, первый рулон 226 и второй рулон 227 расположены вне рабочей позиции 218 обтирочного материала. Кожух имеет днище 219, и расположенные на днище 219 переднюю пластину 228 и заднюю пластину 229. На передней пластине 228 предусмотрен проход 2881, ведущий к рабочей позиции 218 обтирочного материала, чтобы робот-уборщик 100 поступил на рабочую позицию 218 обтирочного материала или покинул ее.
Передняя пластина 228 и задняя пластина 229 приводят к подвешиванию первого рулона 226 и второго рулона 227, чтобы было удобно вращать первый рулон 226 и второй рулон 227. Кожух снабжен рулевыми валами 223 соответственно на двух сторонах рабочей позиции 218 обтирочного материала в горизонтальном направлении, второй рулон 227 расположен над рабочей позицией 218 обтирочного материала, основной ремень 216 проходит через рулевой вал 223 от второго рулона 227, после изменения направления доходит до первого рулона 226.
Основной ремень 216, находящийся на рабочей позиции 218 обтирочного материала, расположен рядом с днищем 219, обтирочный материал прикреплен к основному ремню 216, обращаясь к днищу 219 задней частью. Чтобы обеспечить параллельное расположение основного ремня 216 и днища 219, рулевые валы 223, расположенные на двух сторонах рабочей позиции 218 обтирочного материала в горизонтальном направлении, находятся на одинаковой высоте относительно днища 219, при прохождении через рулевые валы 223 основной ремень 216 изменяет направление протягивания. Основной ремень 216 находится в растянутом состоянии или в натянутом состоянии между первым рулоном 226 и вторым рулоном 227, и поэтому можно обеспечить, что на рабочей позиции 218 обтирочного материала обтирочный материал обращен к роботу-уборщику 100 в растянутом состоянии, облегчая замену роботом-уборщиком 100 обтирочного материала.
Базовая станция 200 дополнительно оборудована механизмом позиционирования, предназначенным для размещения обтирочного материала на рабочей позиции 218 обтирочного материала. Механизм позиционирования может быть узлом позиционирования конструкции, например, подъемной задерживающей пластиной, на основном ремне 216 имеется ограничительная канавка, воздействующая с основным ремнем. Когда нужно ограничить основной ремень 216 в неподвижности, задерживающая пластина поднимается или раскладывается, протягивается в ограничительную канавку, чтобы остановить основной ремень 216 и предотвратить движение основного ремня 216. Для снятия ограничения задерживающая пластина опускается и покидает ограничительную канавку, основной ремень 216 нормально перемещается.
Чтобы реализовать автоматическое управление и уменьшить операции пользователя, механизм позиционирования включает в себя контроллер, а также измерительный узел, использованный для измерения количества поворотов рулевого вала 223, контроллер определяет местоположение обтирочного материала в соответствии с количеством поворотов, измеренным измерительным узлом. Измерительный узел может измерить количество поворотов любого из двух рулевых валов 223. После того, как основной ремень 216 несет использованный обтирочный материал 21b, исходное количество поворотов каждого рулевого вала 223 обнуляется, и начинается измерять количество поворотов заново. Основной ремень 216 останавливается, когда достигается назначенное количество поворотов, следующий используемый обтирочный материал 21a перемещается до рабочей позиции 218 обтирочного материала. Кроме того, контроллер может дополнительно определить местоположение обтирочного материала, переносимого основным ремнем 216, в соответствии с количеством поворотов, на которое увеличено каждый раз, и определить количество оставшихся используемых обтирочных материалов 21a в соответствии с окончательно накопленным количеством поворотов.
Робот-уборщик 100 снабжен карданным колесом и обтирочной платформой, которые могут перемещаться вверх и вниз, карданное колесо и обтирочная платформа складываются и опускаются за счет перемещения вверх и вниз. Робот-уборщик 100 имеет режим очистки и режим преодоления препятствий, в режиме очистки обтирочная платформа перемещается вниз для поддерживания робота-уборщика 100 и карданное колесо складывается. В режиме преодоления препятствий обтирочная платформа складывается, а карданное колесо опускается для поддерживания робота-уборщика 100. В режиме преодоления препятствий робот-уборщик 100 входит на рабочую позицию 218 обтирочного материала. Обтирочная платформа снабжена механизмом зажима, который имеет позицию зажима, при которой обтирочный материал закреплен на нижней поверхности обтирочной платформы, и позицию высвобождения, при которой обтирочный материал может отсоединиться от обтирочной платформы.
После того, как робот-уборщик 100 несет обтирочный материал, расположенный на рабочей позиции 218 обтирочного материала на базовой станции 200, и перемещает его из рабочей позиции 218 обтирочного материала, основной ремень 216 на рабочей позиции 218 обтирочного материала находится в свободном от обтирочного материала положении, образуя свободную зону 222. Когда робот-уборщик 100 должен заменить обтирочный материал, робот-уборщик 100 переключается из режима очистки в режим преодоления препятствий.
В режиме очистки обтирочный материал захвачен механизмом зажима и закреплен на обтирочной платформе, чтобы выполнить уборку полов вместе с обтирочной платформой. Обтирочная платформа опускается, обтирочный материал входит в контакт с полом. В режиме преодоления препятствий робот-уборщик 100 поддерживается с помощью карданного колеса, а обтирочная платформа перемещается вверх, подвешивая обтирочный материал. Со ссылкой на фиг. 60 и фиг. 61, используя режим преодоления препятствий, робот-уборщик 100 приближается к базовой станции 200 в соответствии с командой от внутреннего контроллера, входит на рабочую позицию 218 обтирочного материала через проход 2881 и пересекает основной ремень 216. В этом случае обтирочная платформа обращена к свободной зоне 222. Как показано на фиг. 63, обтирочная платформа перемещается вниз, нося использованный обтирочный материал 21b, пока обтирочный материал не войдет в контакт и прикрепится к основному ремню 216.
В этом случае механизм зажима переключается из позиции зажима в позицию высвобождения, обтирочный материал отсоединяется от обтирочной платформы. Далее, обтирочная платформа и механизм зажима перемещаются вверх, использованный обтирочный материал 21b расположен на основном ремне 216 на рабочей позиции 218 обтирочного материала. Затем первый рулон 226 приводится во вращение электродвигателем, приводя основной ремень 216 в перемещение, пока следующий используемый обтирочный материал 21a не высвободится из второго рулона 227 и не войдет на рабочую позицию 218 обтирочного материала вместе с основным ремнем 216. Соответственно, использованный обтирочный материал 21b наматывается на первый рулон 226 вместе с основным ремнем 216.
Затем, обтирочная платформа перемещается вниз, пока не войдет в контакт с используемым обтирочным материалом 21a, при этом механизм зажима переключается из позиции высвобождения в позицию зажима, закрепляя обтирочный материал на нижней поверхности обтирочной платформы, выполняя установку обтирочного материала. После этого обтирочная платформа поднимается, механизм зажима остается в позиции зажима. Таким образом, выполняется замена обтирочного материала. Далее, в режиме преодоления препятствий робот-уборщик 100 выходит с базовой станции 200 через проход 2881, и переключается в режим очистки для выполнения операции уборки. Основной ремень 216 остается в неподвижности, пока робот-уборщик 100 не повторит вышеуказанные операции, чтобы поместить использованный обтирочный материал 21b, а затем выполнить замену используемым обтирочным материалом 21a.
В данном примере осуществления предусмотрена система чистки 300, включающая в себя: робот-уборщик 100, и базовую станцию 200, предназначенную для парковки робота-уборщика 100 и указанную в вышеуказанном примере осуществления. Робот-уборщик 100 и базовая станция 200 могут обмениваться данными, например, робот-уборщик 100 и базовая станция 200 обмениваются информацией о местоположении, или базовая станция 200 и робот-уборщик 100 обмениваются информацией о том, находится ли обтирочный материал на рабочей позиции 218 обтирочного материала.
Система чистки 300 или базовая станция 200, предусмотренные в примере осуществления настоящей заявки, еще могут включать в себя механизм напоминания, предназначенный для выдачи сигнала напоминания, когда количество используемых обтирочных материалов 21а меньше предполагаемого количества. Если длина всего основного ремня 216 зафиксирована, то можно определить, что количество используемых обтирочных материалов 21а меньше предполагаемого количества, когда достигается определенного количества поворотов, в соответствии с накопленным количеством поворотов рулевого вала 223 либо первого рулона 226 либо второго рулона 227. Разумеется, можно также за счет измерения текущего диаметра первого рулона 226 или второго рулона 227, то есть, когда диаметр первого рулона 226 больше предварительно установленного диаметра, или диаметр второго рулона 227 меньше предварительно установленного диаметра, что указывает на то, что количество используемых обтирочных материалов 21а меньше предполагаемого количества и необходимо поменять на новый основной ремень 216 в целом, таким образом, улучшая пользовательский опыт.
Следует отметить, что в описаниях настоящего изобретения термины «первый» и «второй» используются только для цели описания и различия подобных объектов без ограничения последовательности между ними, и не могут пониматься как указание или намек на относительную важность. Кроме того, в описании настоящего изобретение «множество» означает два или более, если не указано иное.
Выше описаны только несколько примеров осуществления настоящего изобретения. Квалифицированные специалисты в данной области техники могут внести различные модификации или изменения в примеры осуществления настоящего изобретения в соответствии с содержанием, раскрытым в документе заявки, не выходя за рамки сущности и объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833538C2 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833996C2 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ РОБОТА-УБОРЩИКА И АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЭТОГО СПОСОБА | 2005 |
|
RU2283750C1 |
| Автоматическое уборочное оборудование | 2021 |
|
RU2820188C1 |
| Автоматическое уборочное оборудование | 2024 |
|
RU2841299C2 |
| МОДУЛЬ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ И РОБОТ-УБОРЩИК, ВКЛЮЧАЮЩИЙ В СЕБЯ ТАКОВОЙ | 2013 |
|
RU2591912C1 |
| ОСНОВАНИЕ ДЛЯ УСТРОЙСТВА ДЛЯ ОБРАБОТКИ БЕЛЬЯ, УЗЕЛ ОСНОВАНИЯ УСТРОЙСТВА ДЛЯ ОБРАБОТКИ БЕЛЬЯ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2023 |
|
RU2840348C2 |
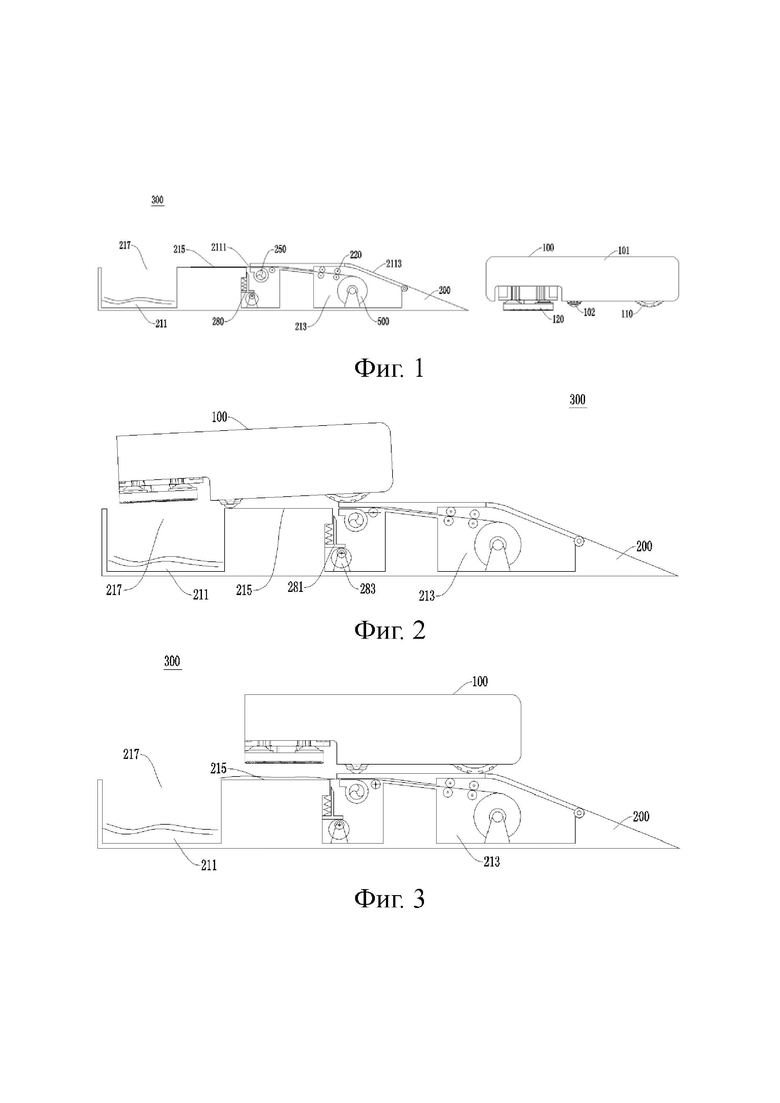
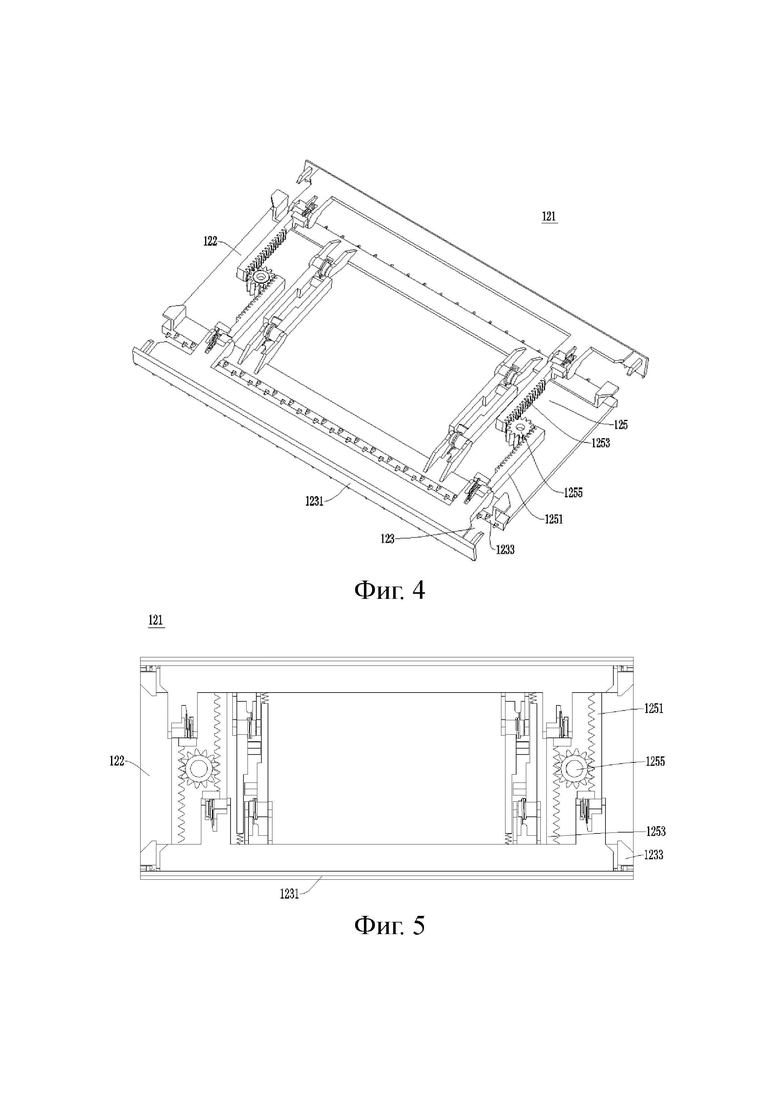
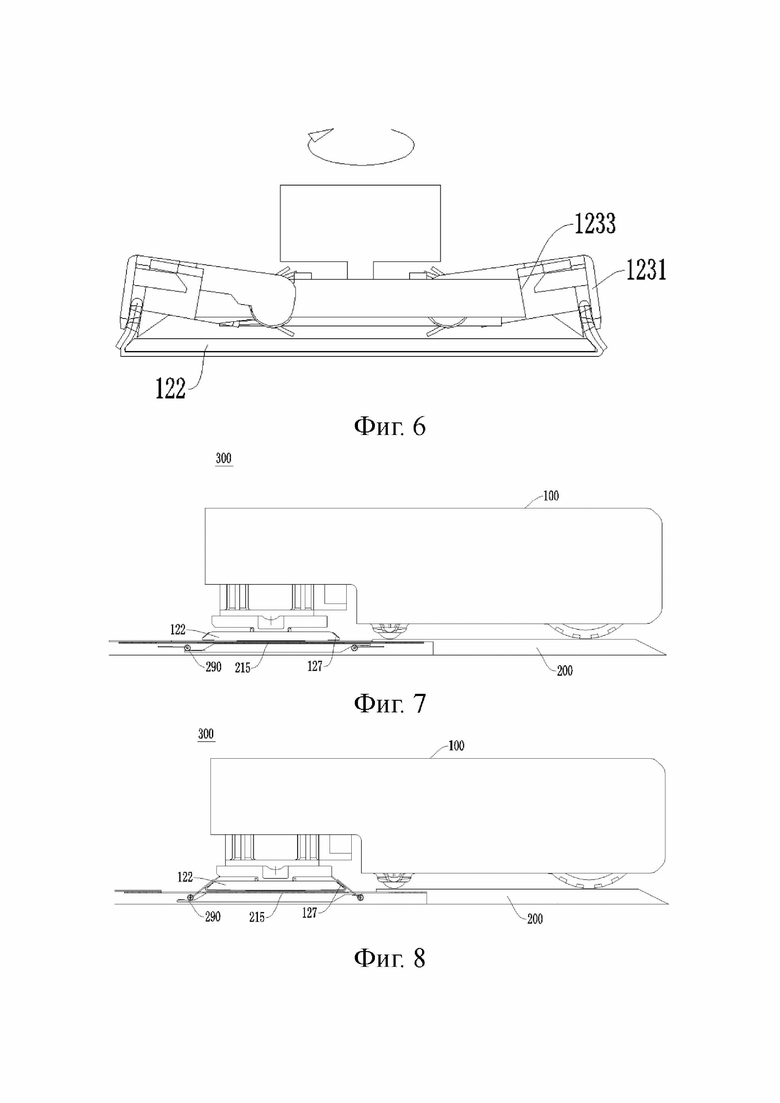
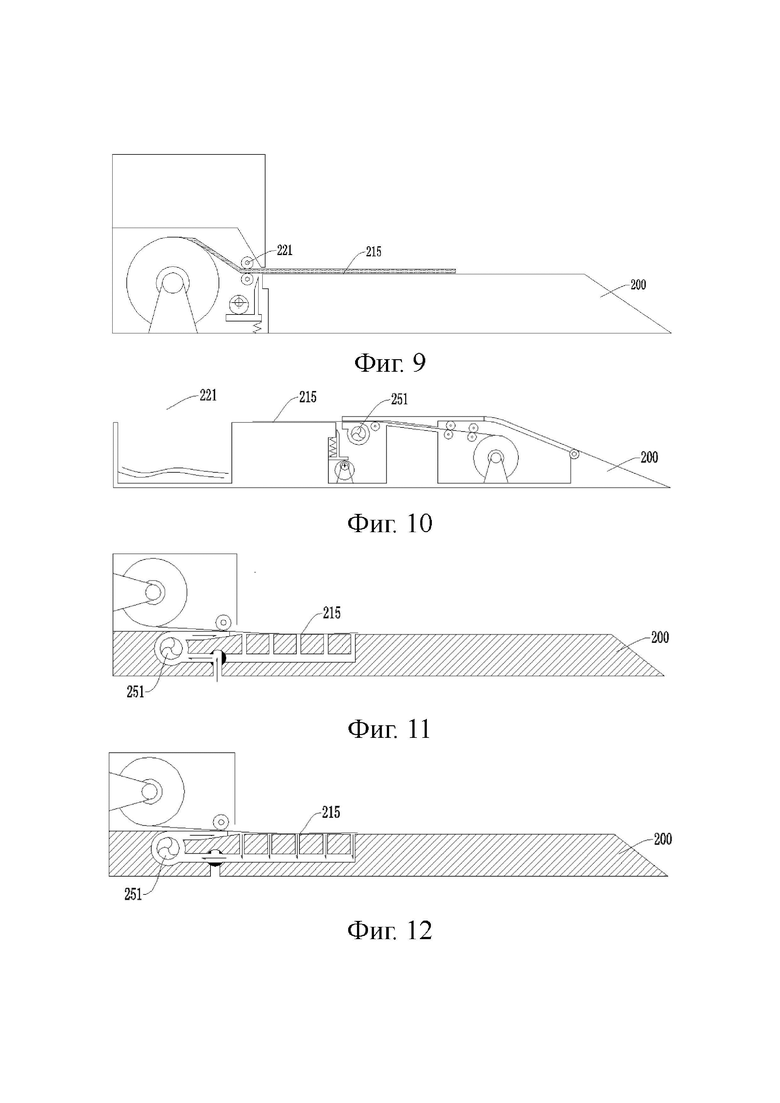

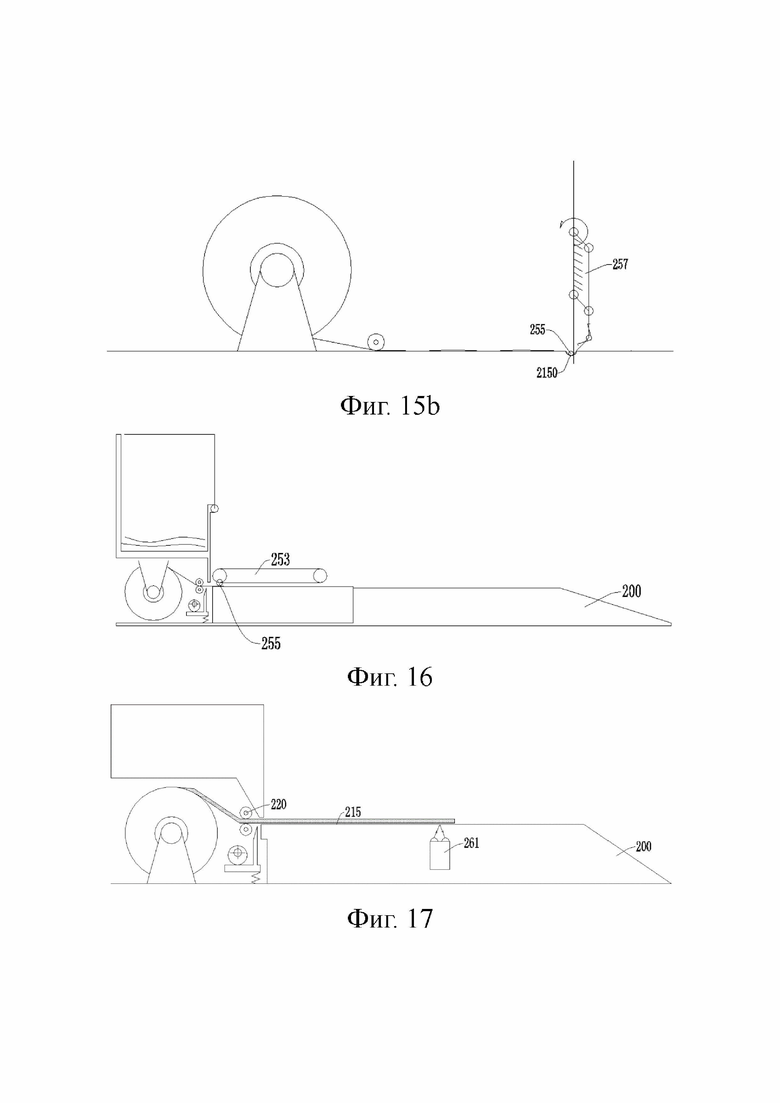
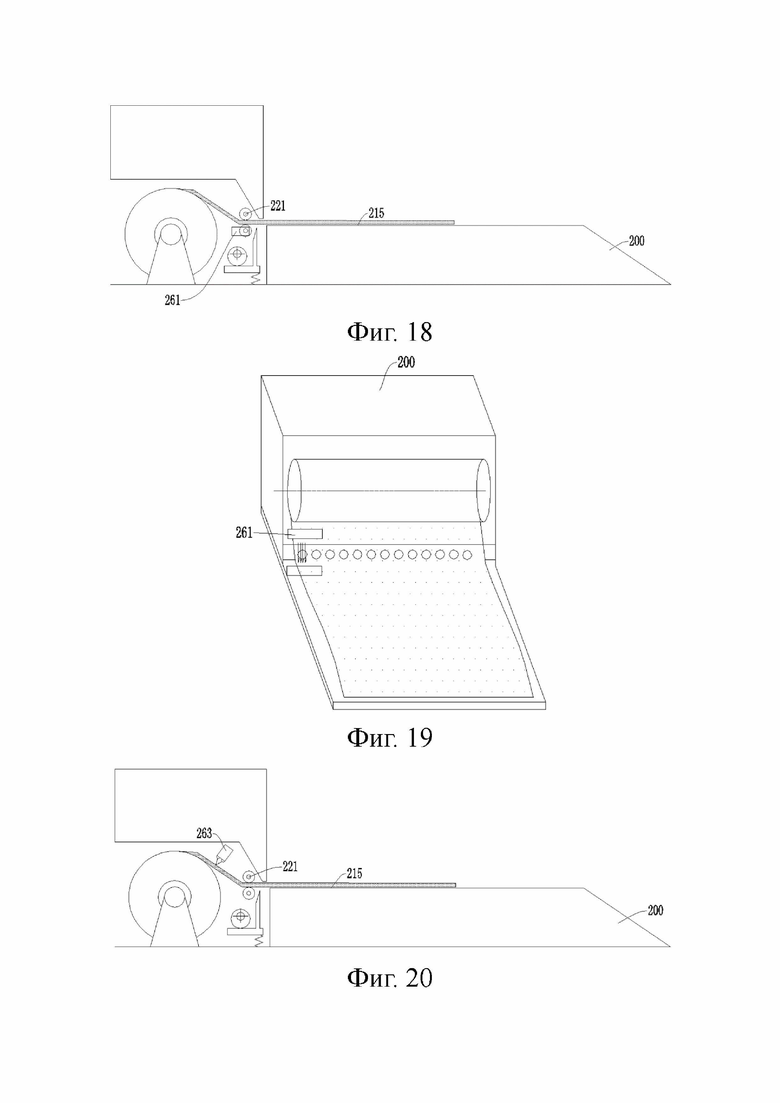
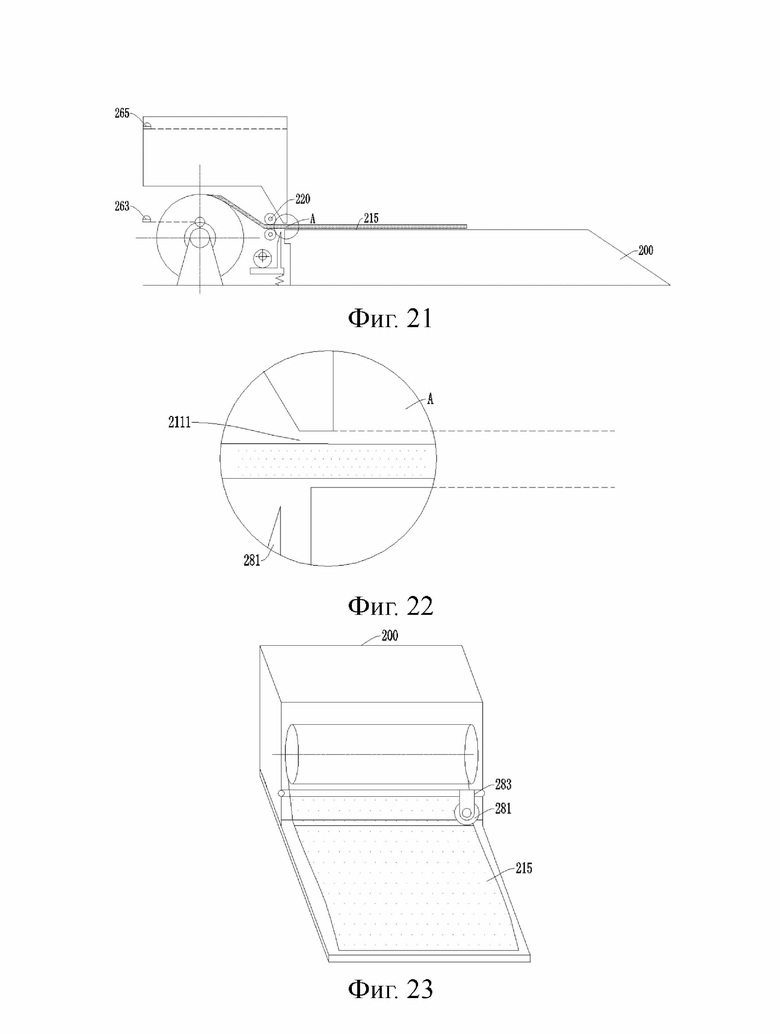
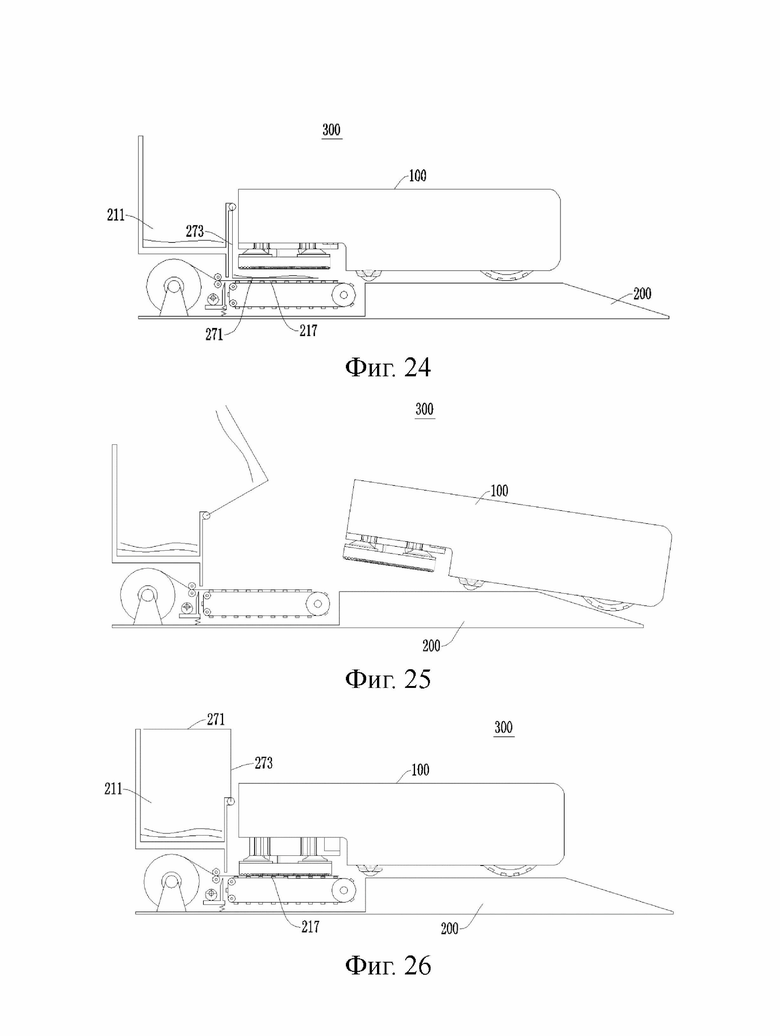
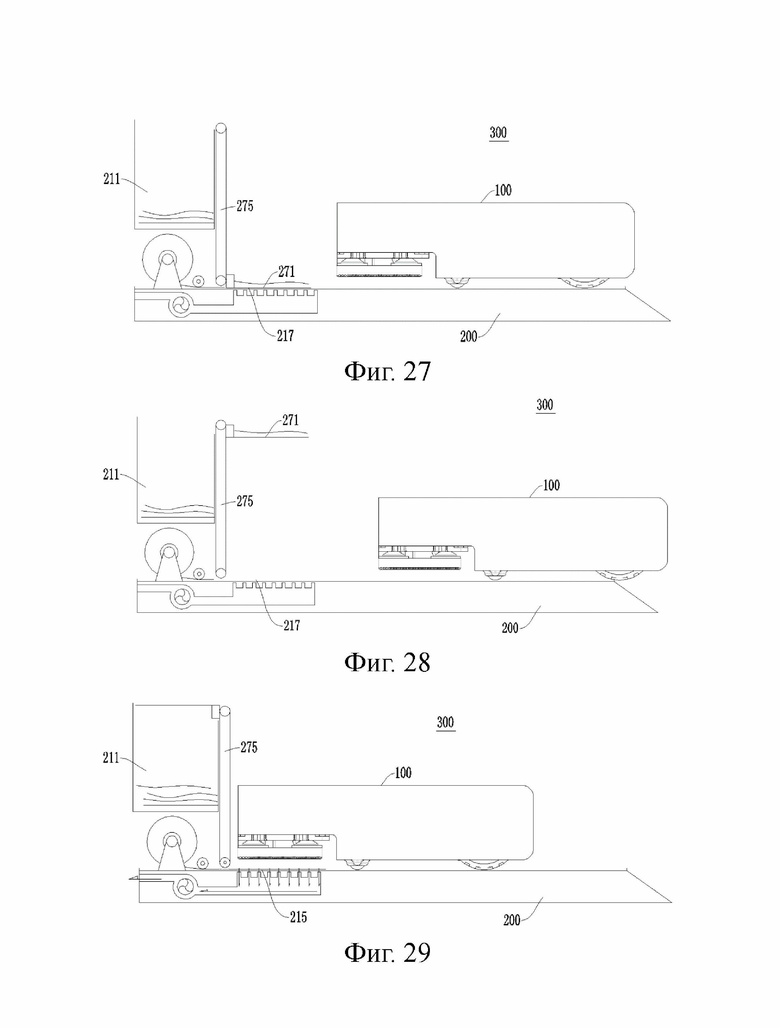
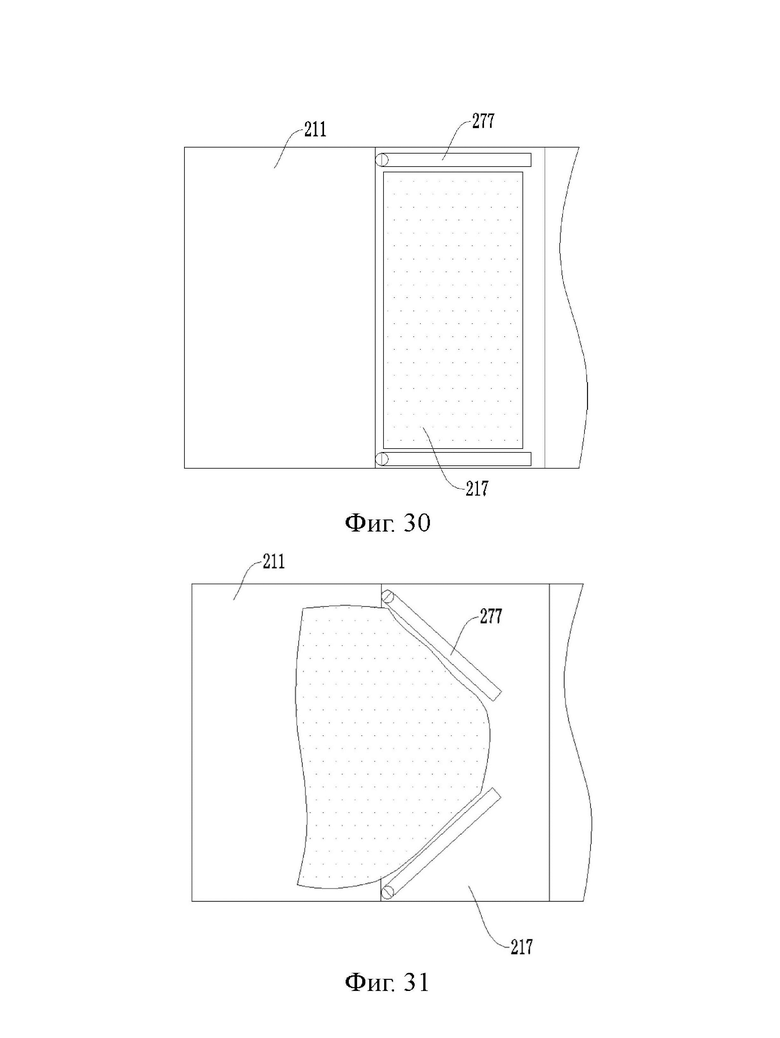
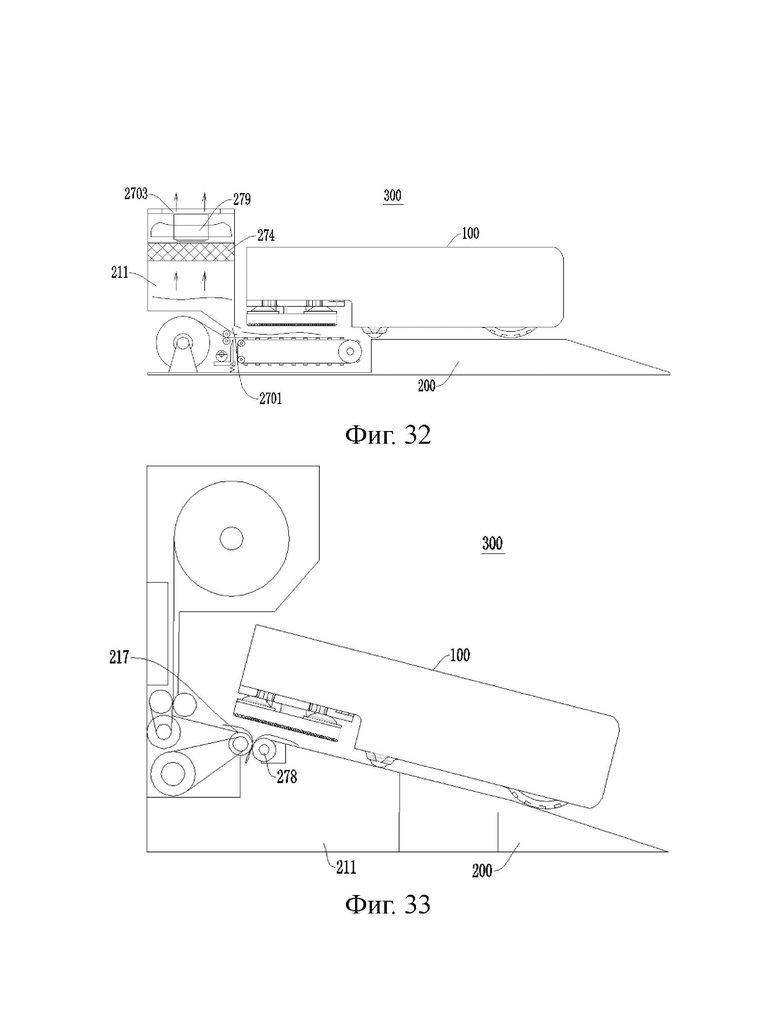
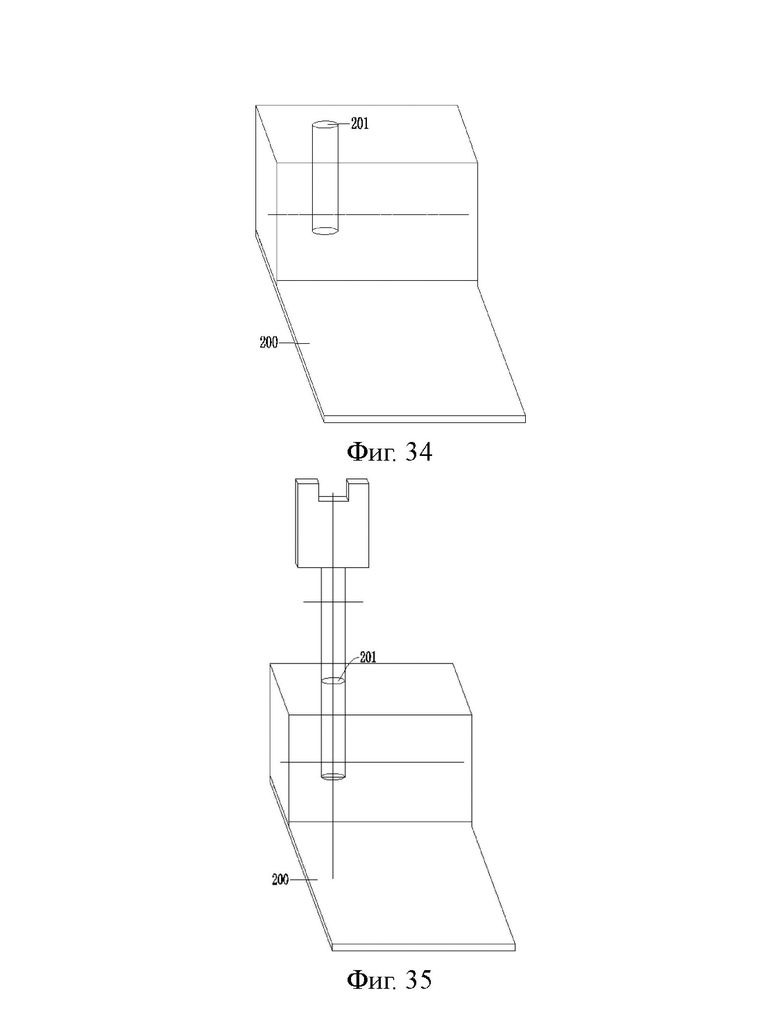
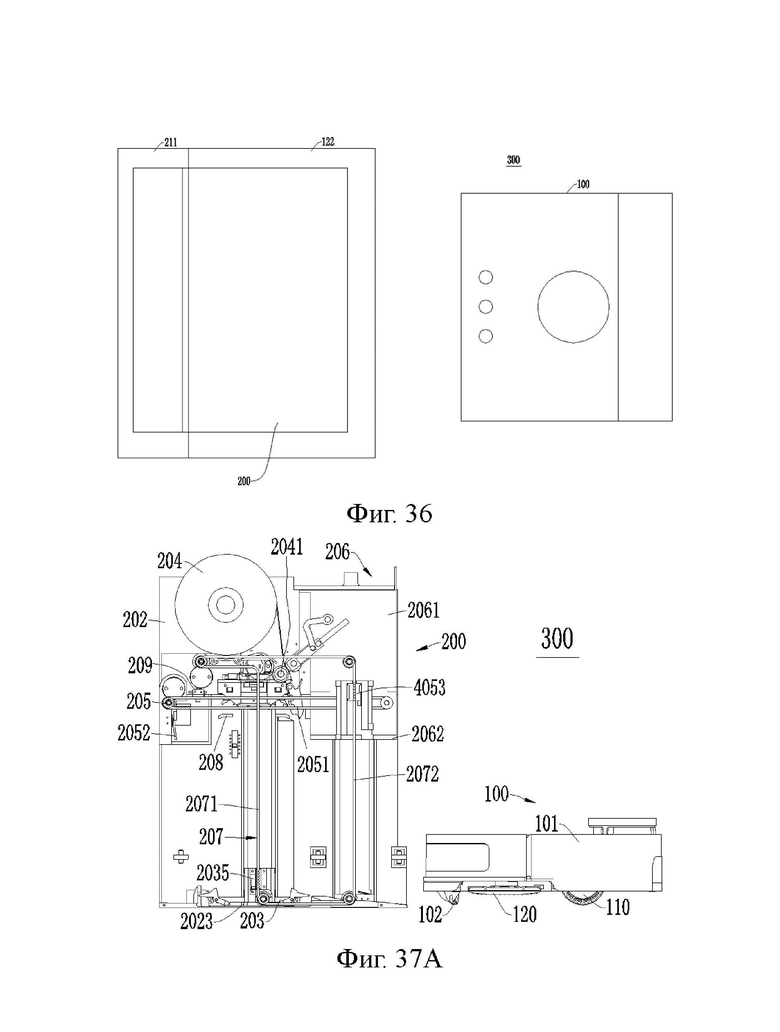
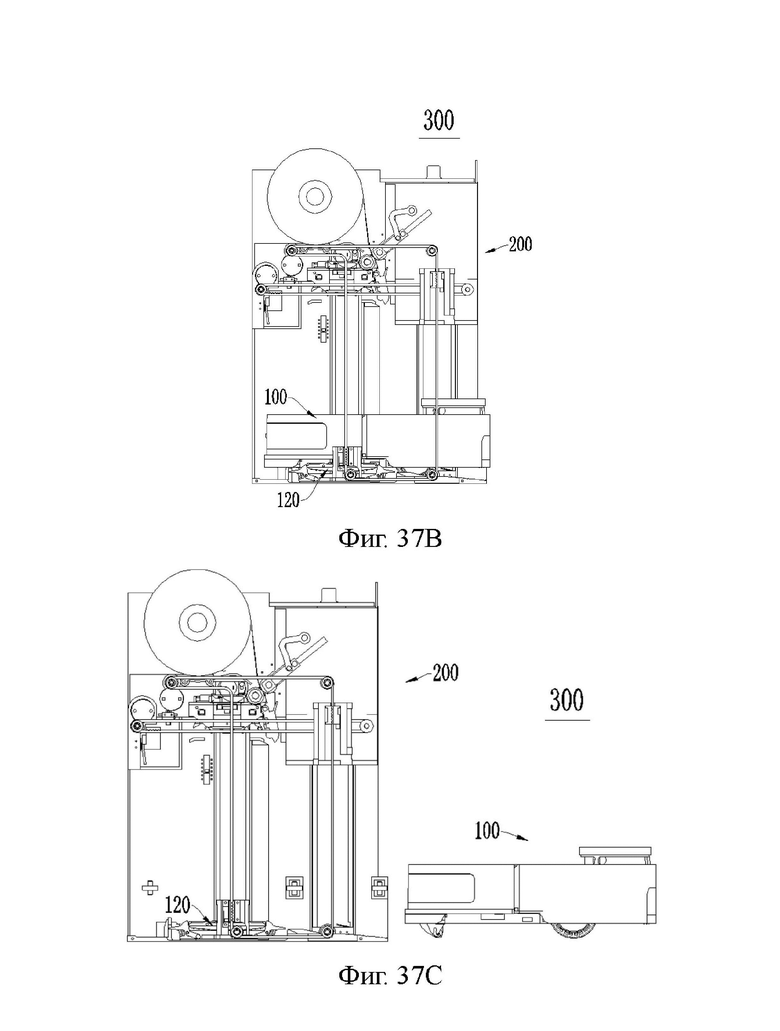
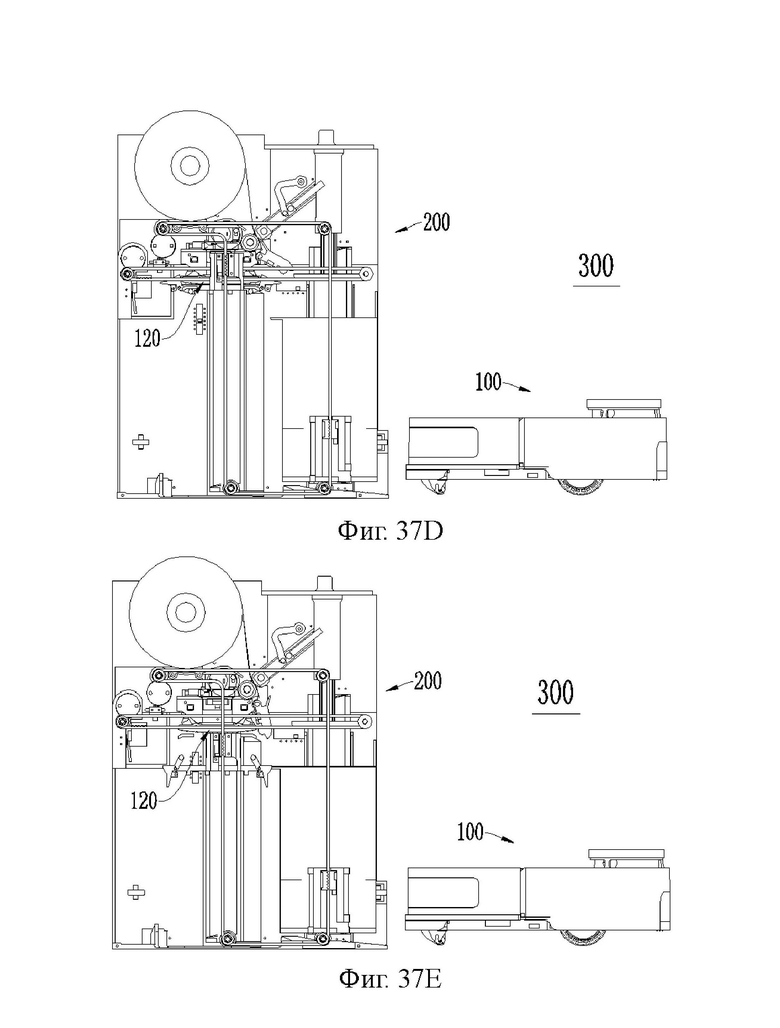
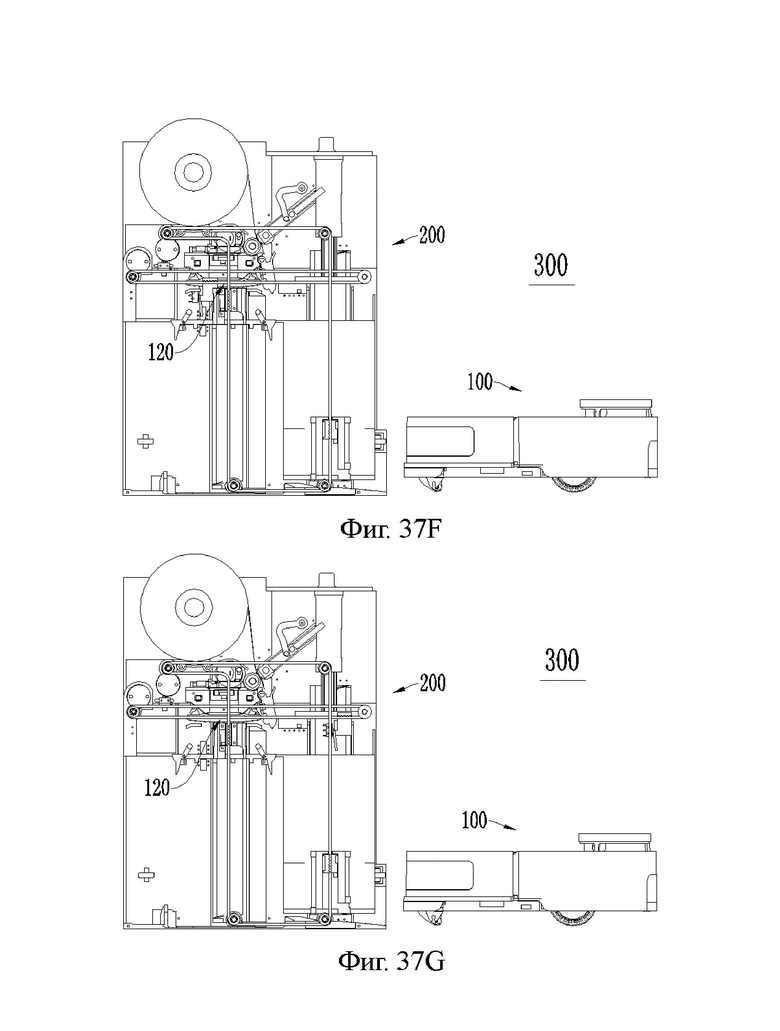
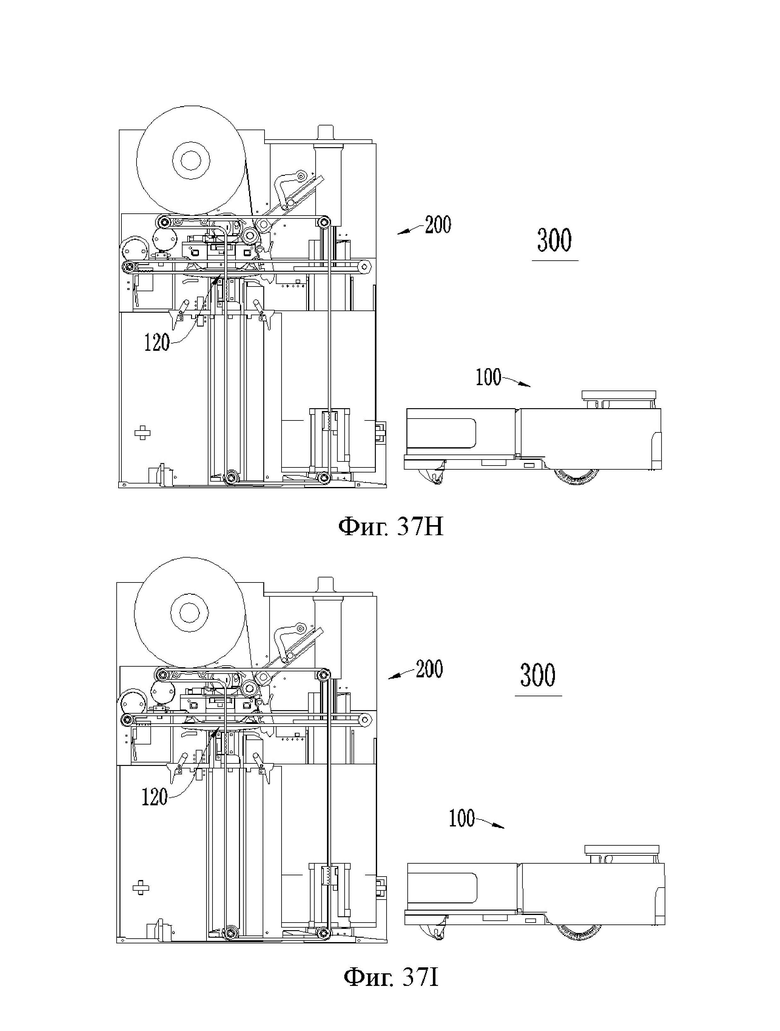
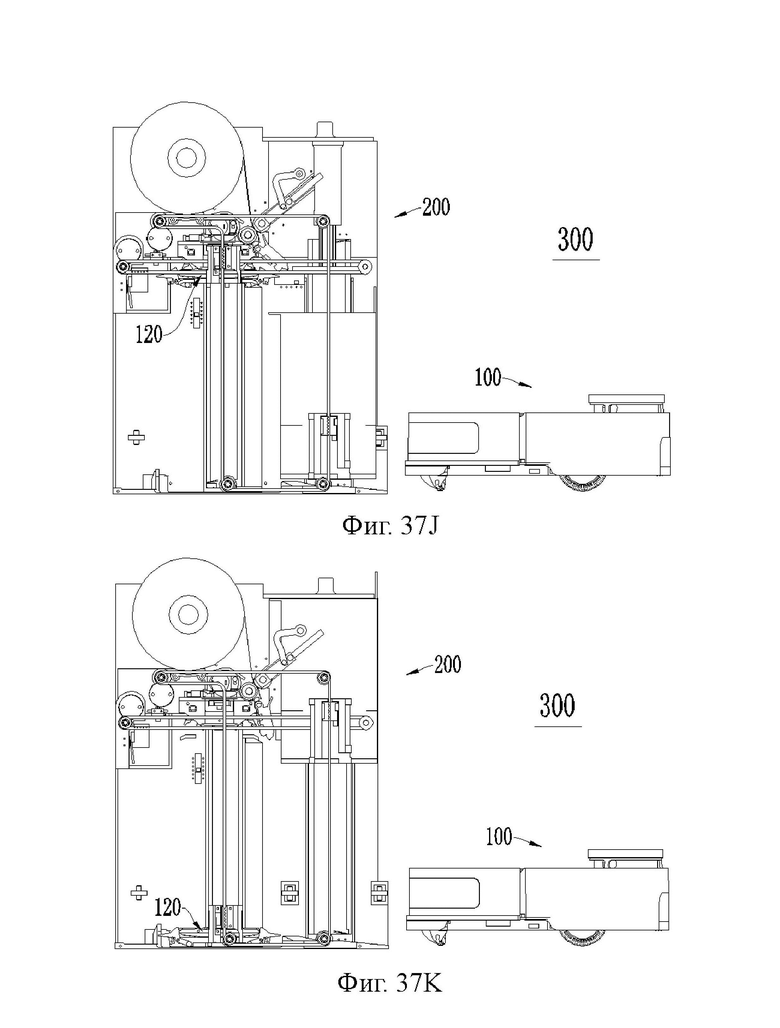
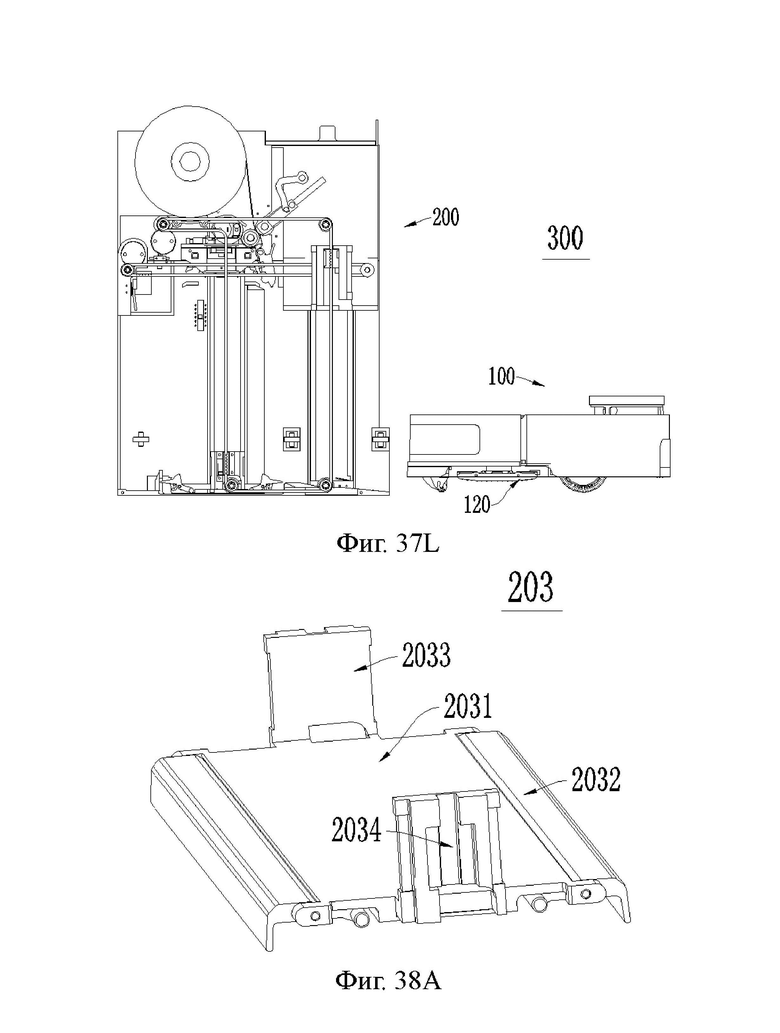
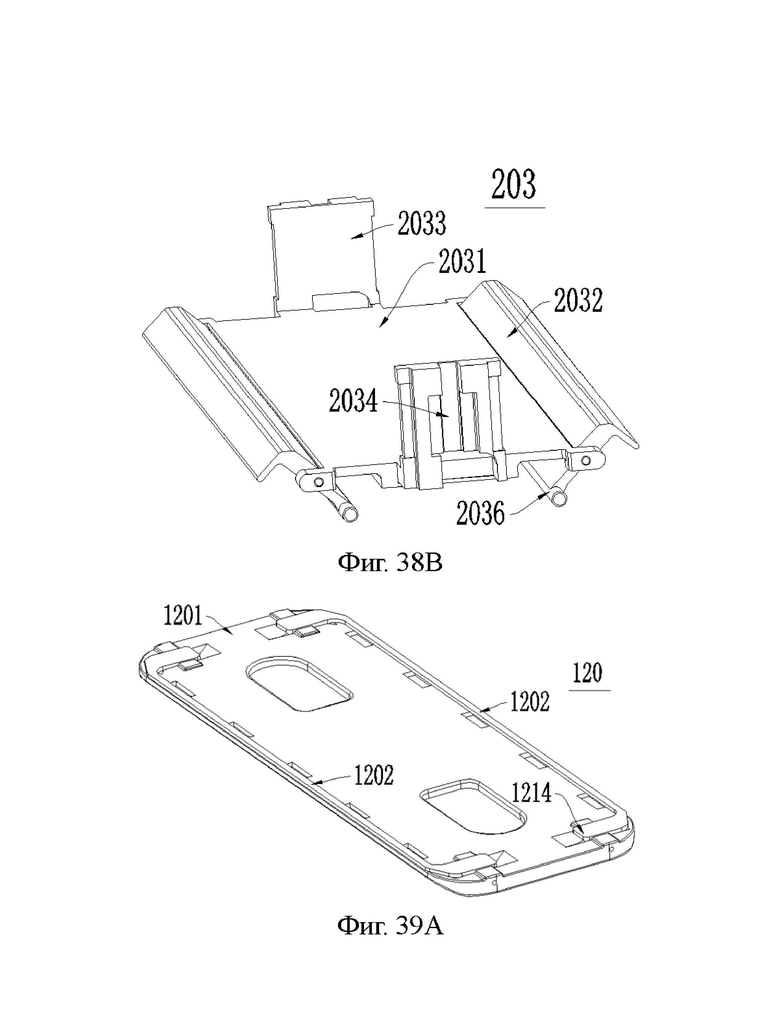
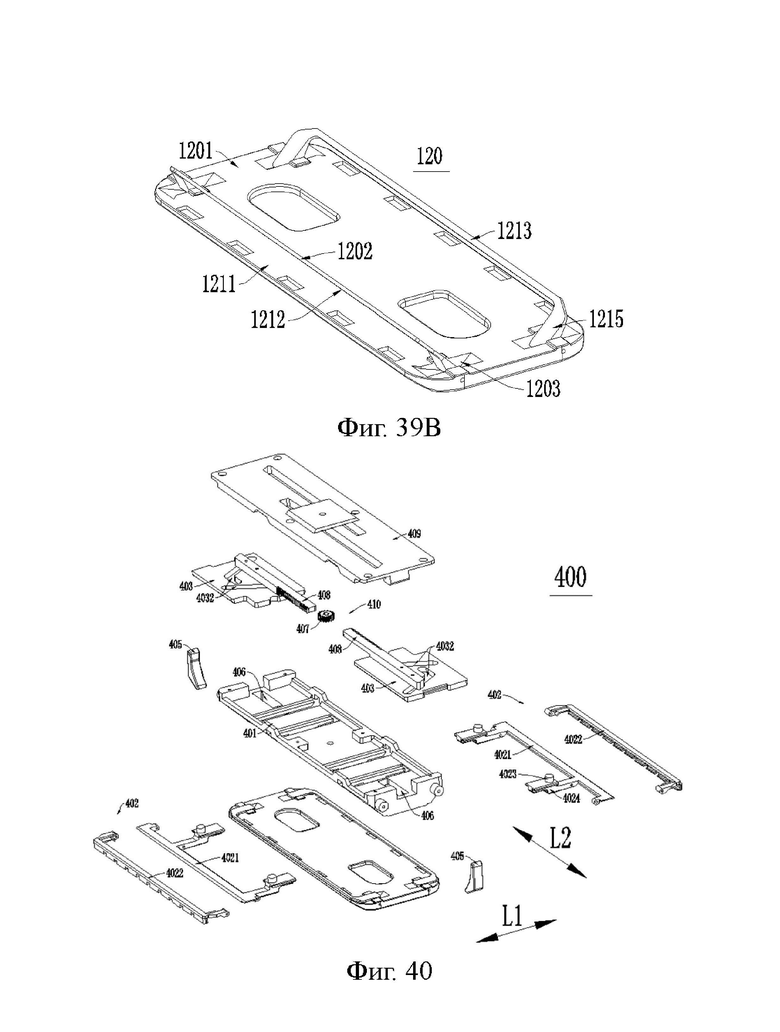
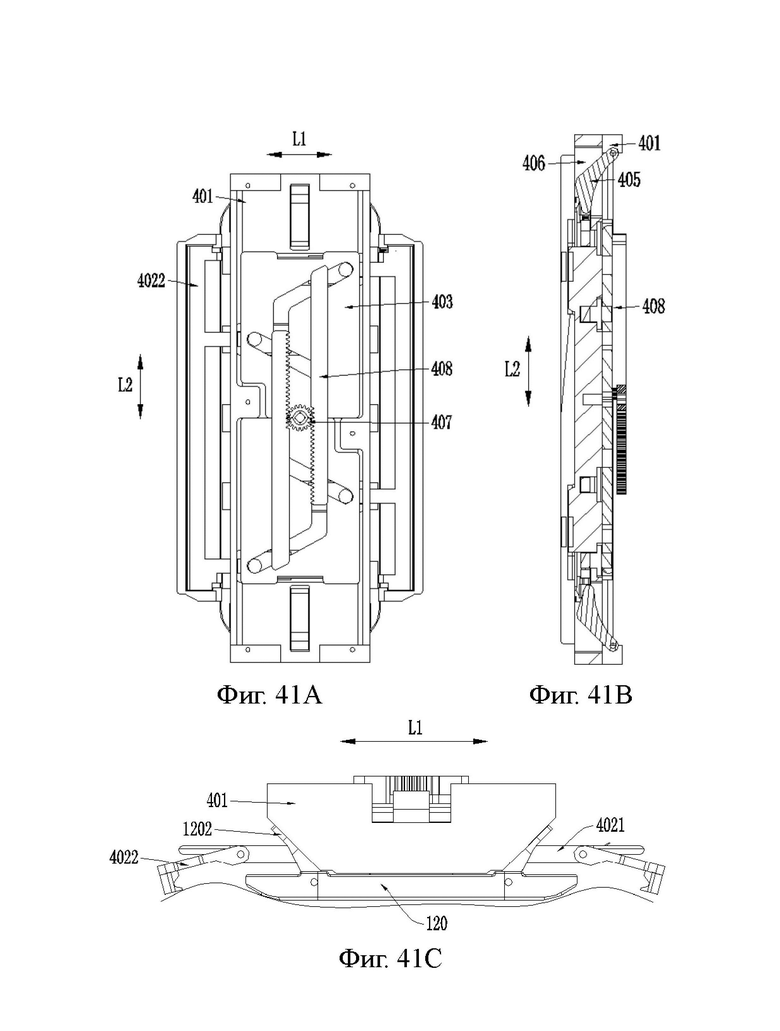
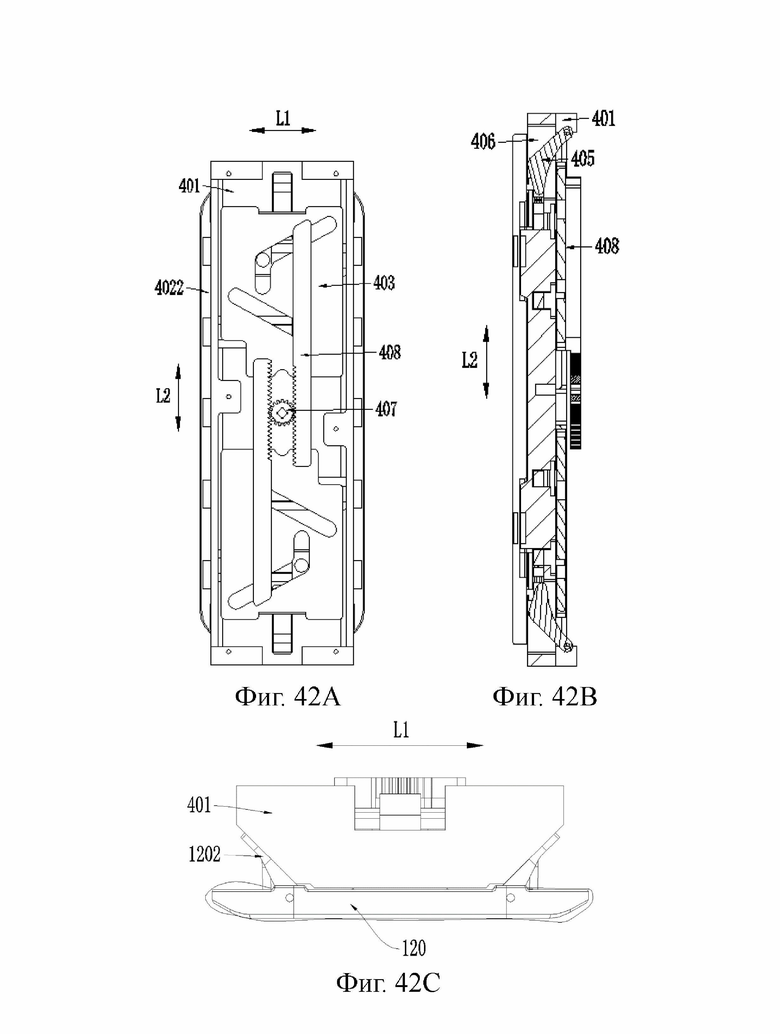
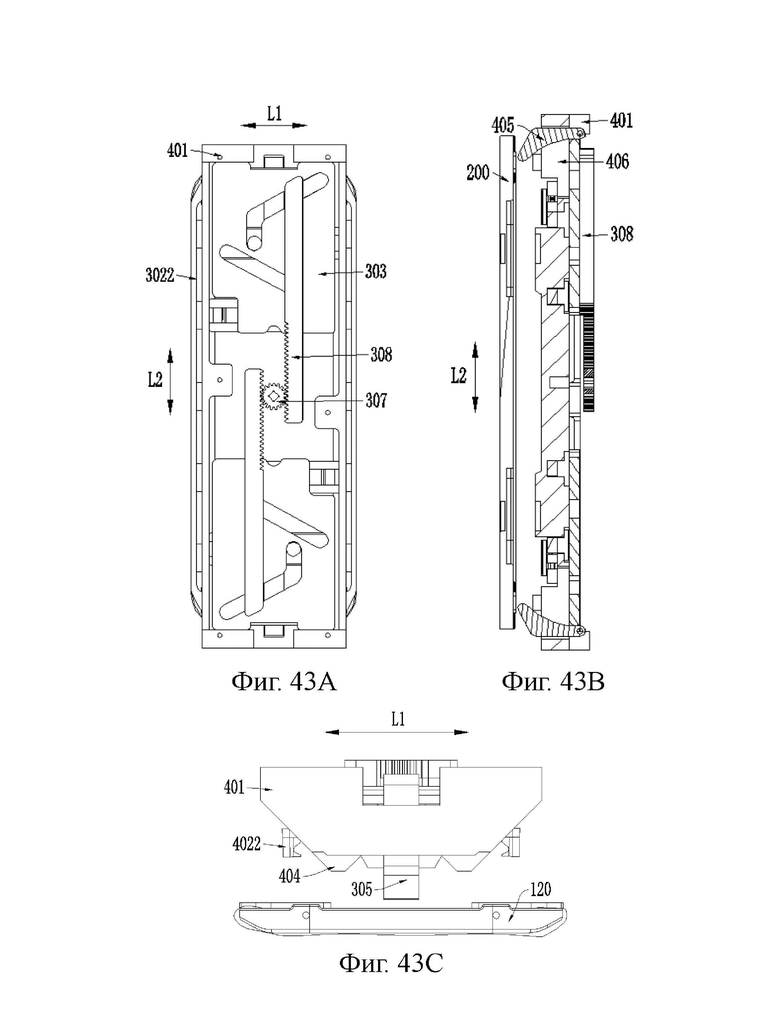
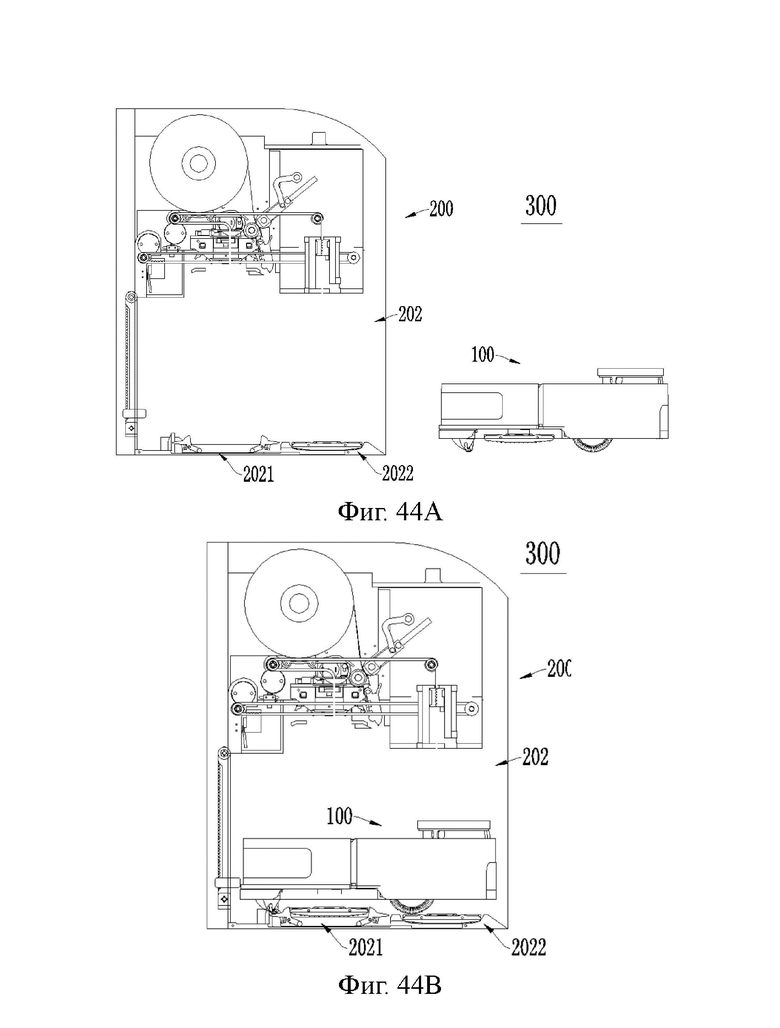
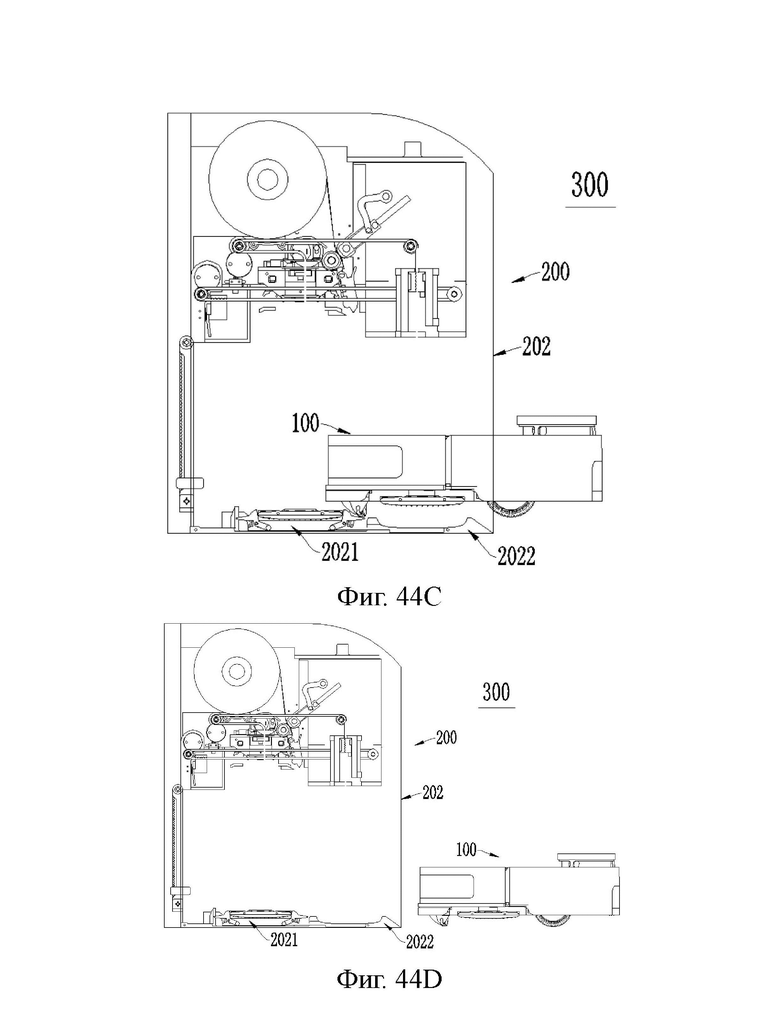
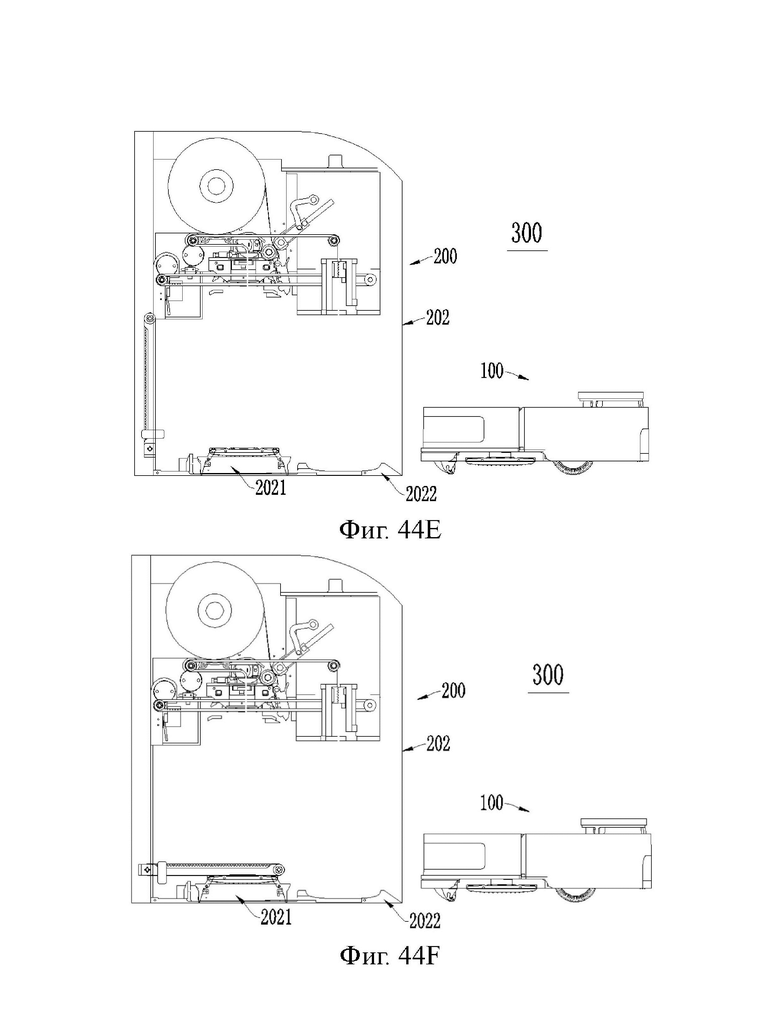
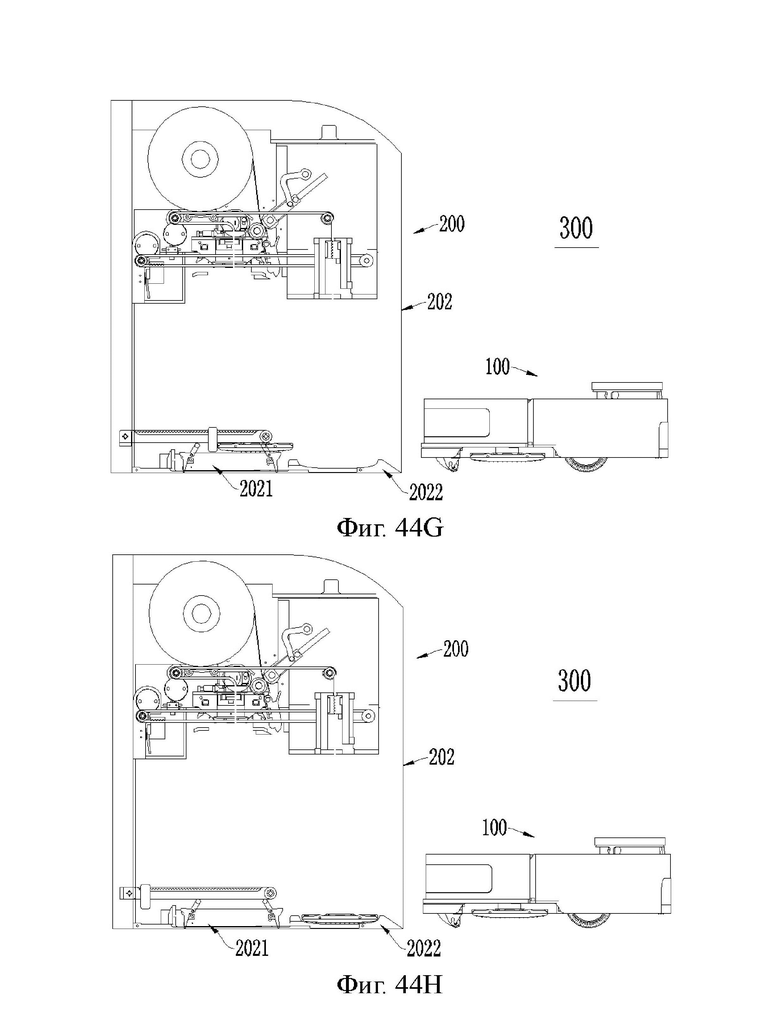
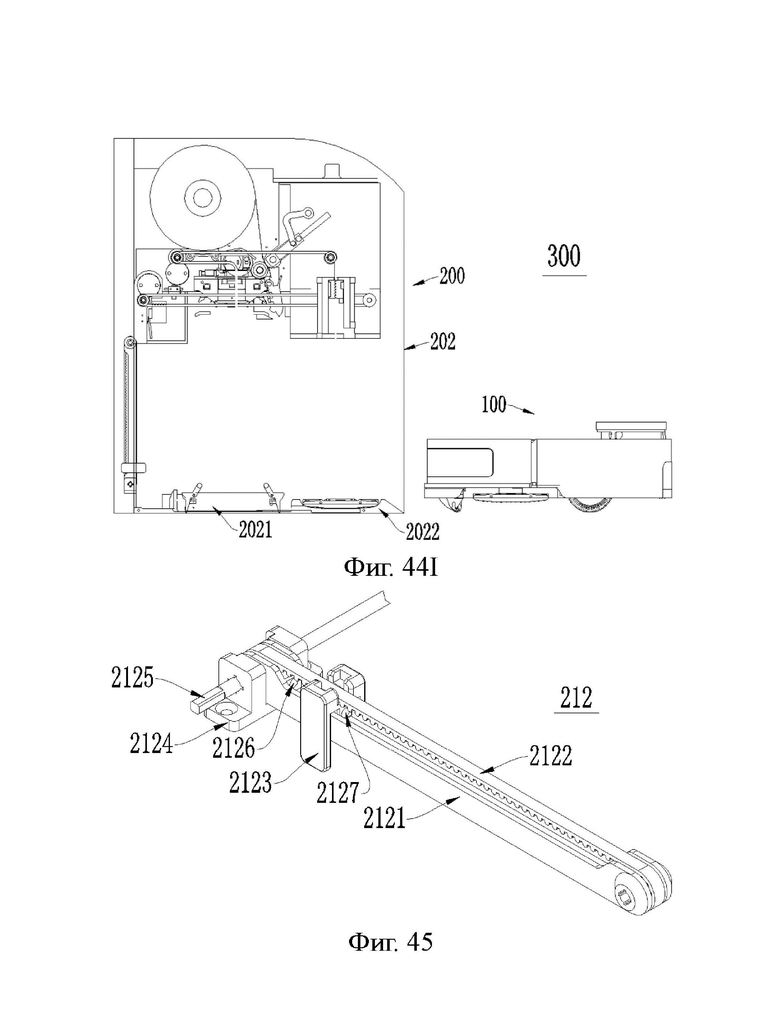
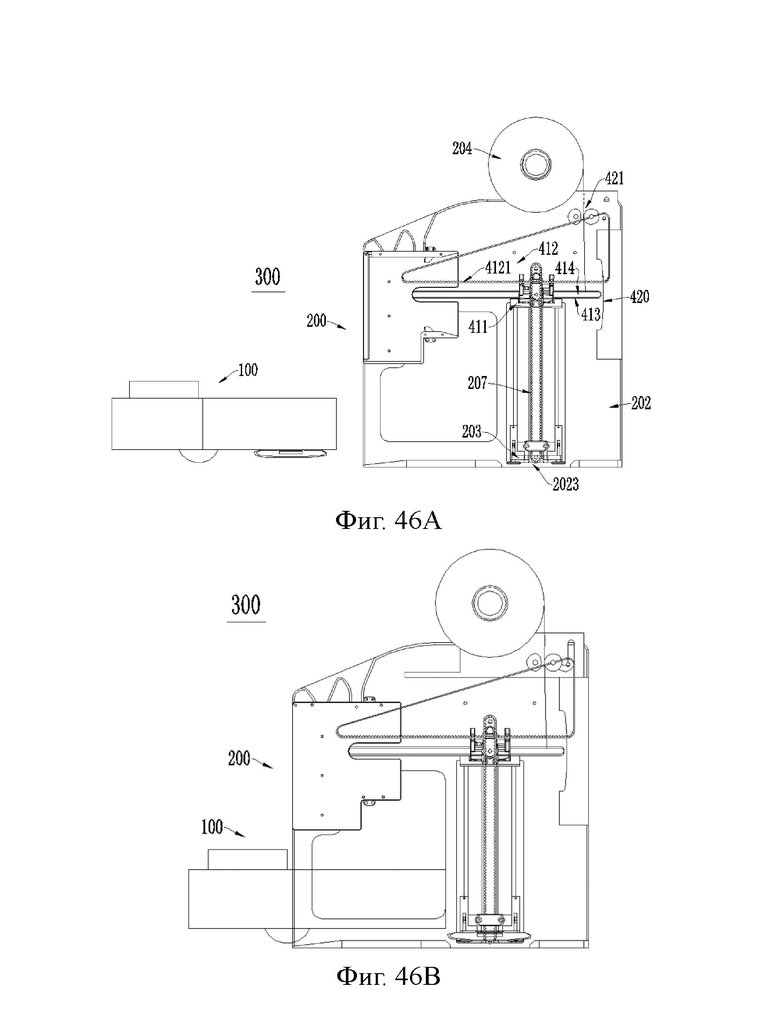
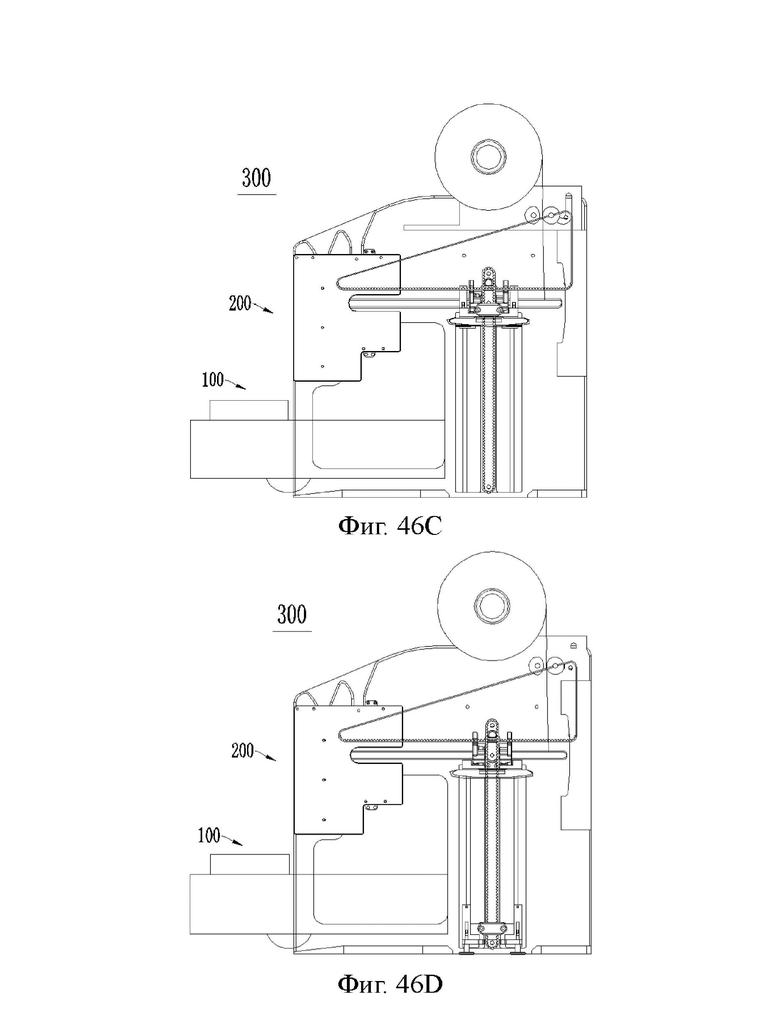
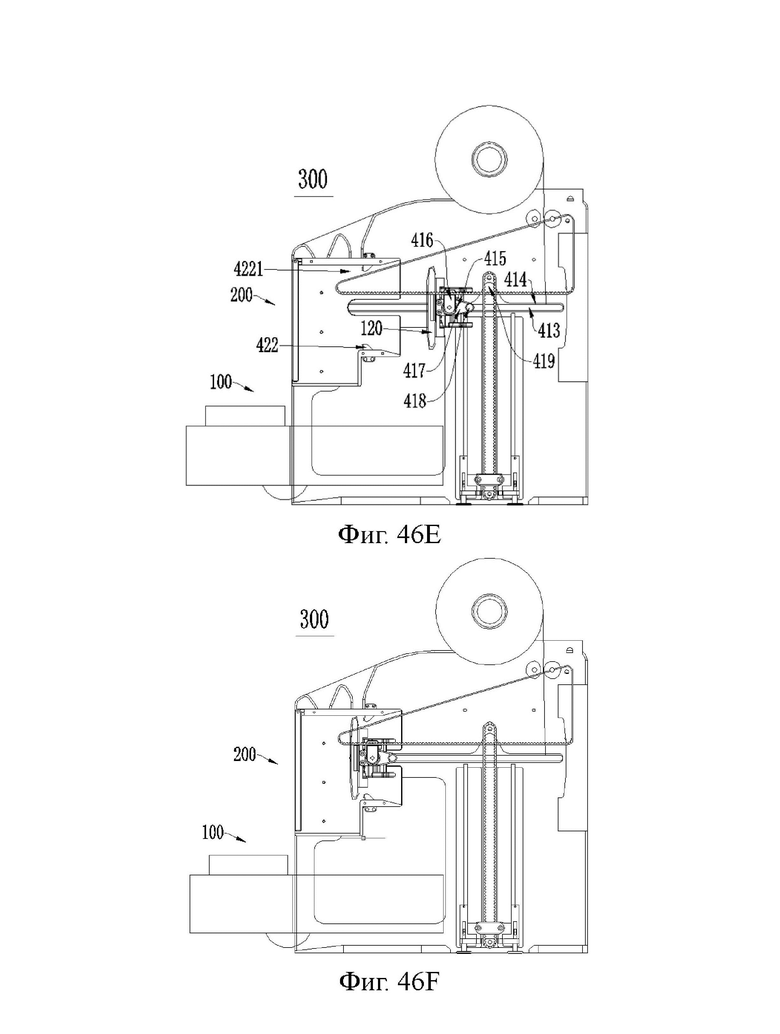
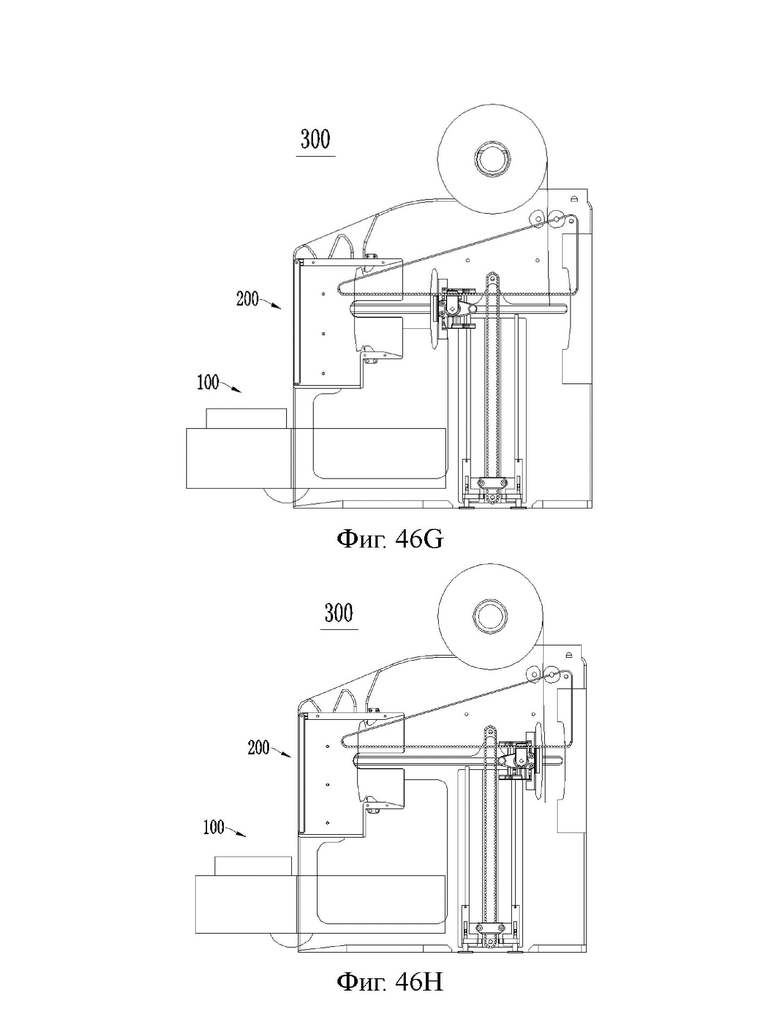
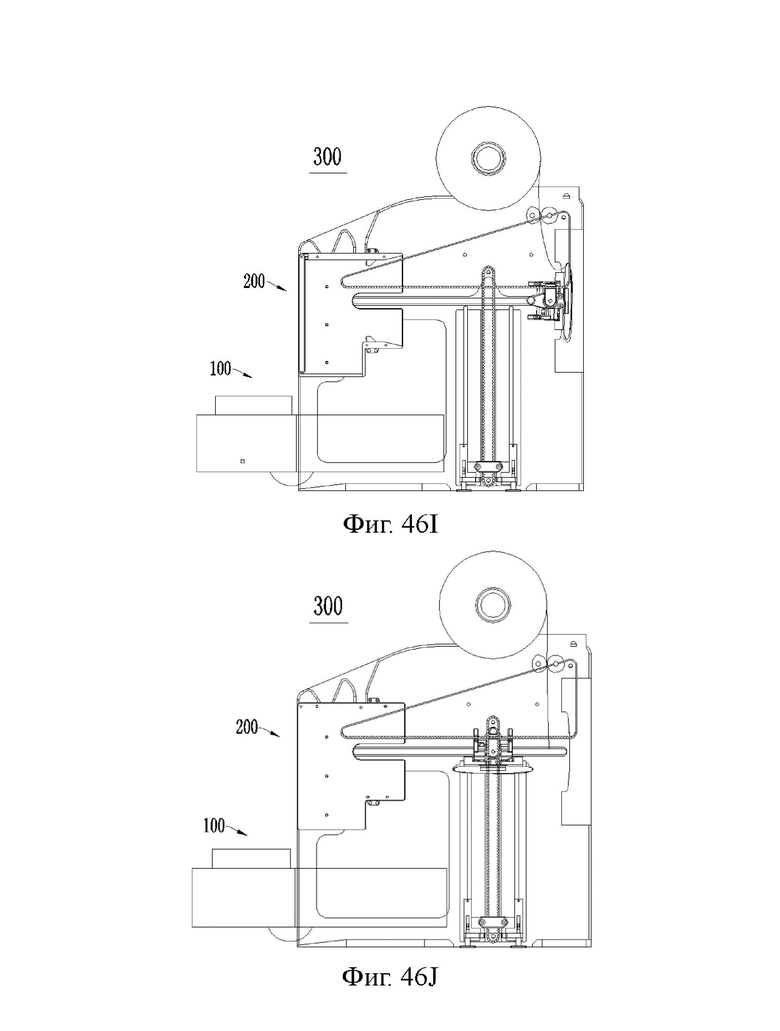
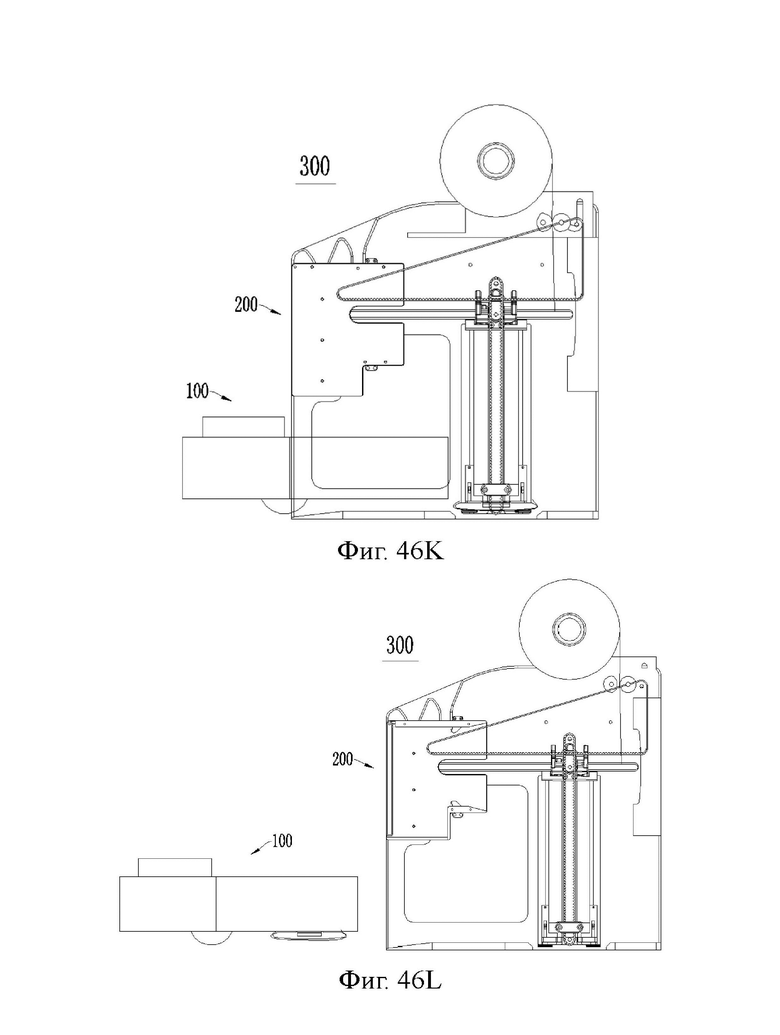
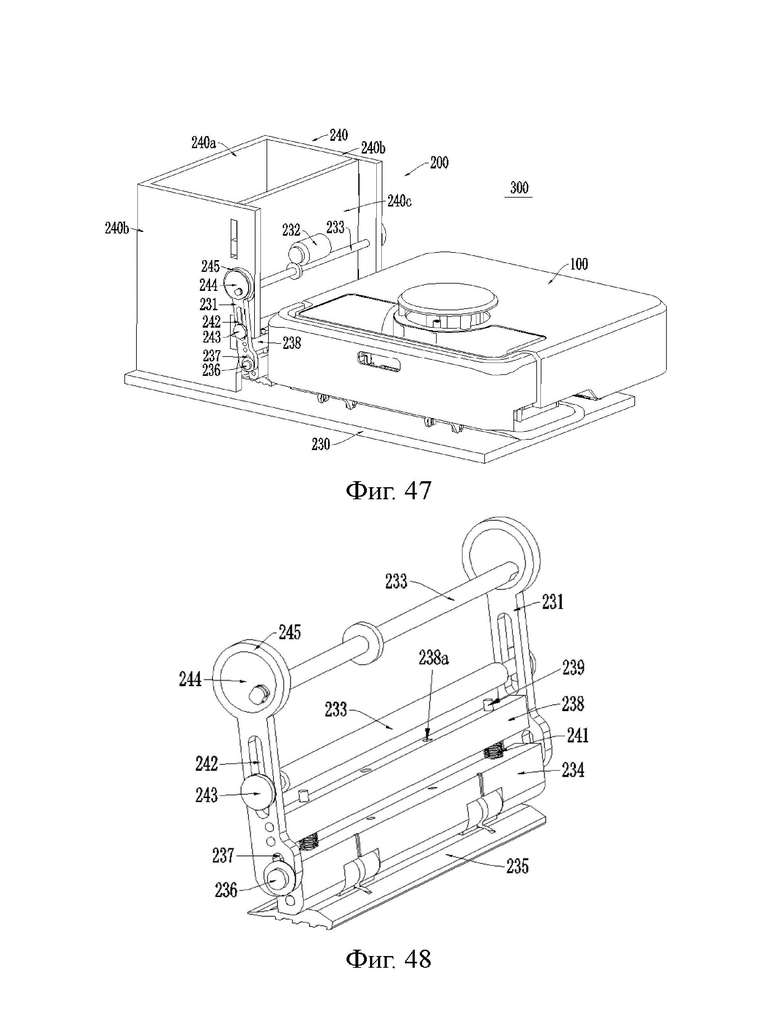
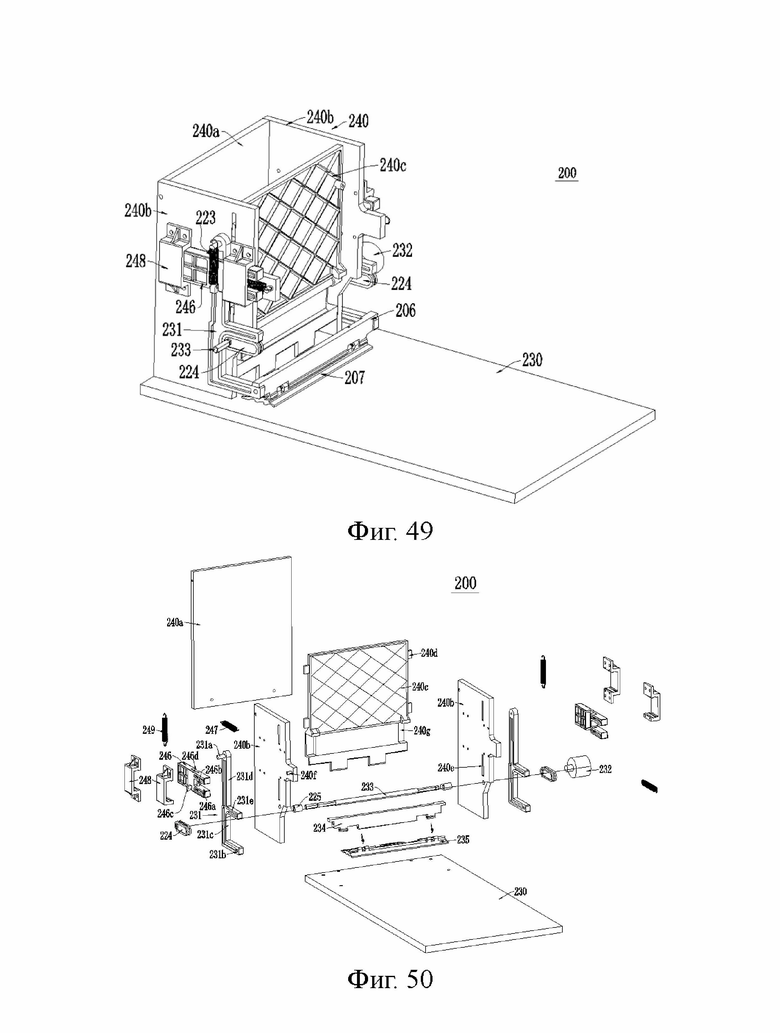
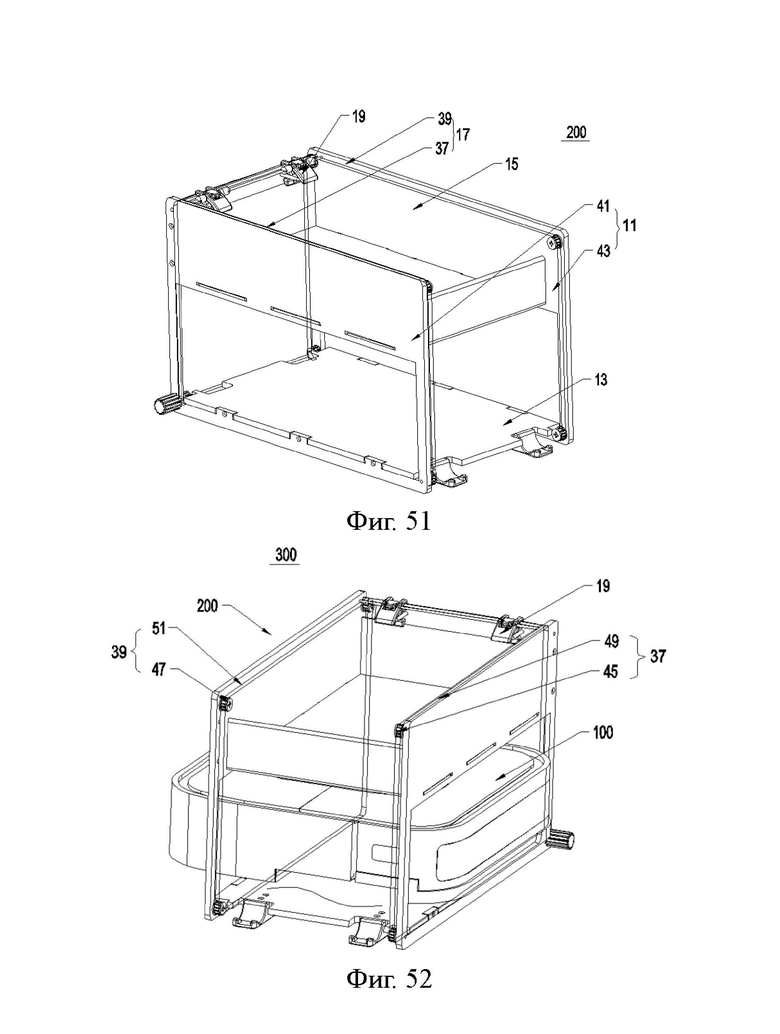
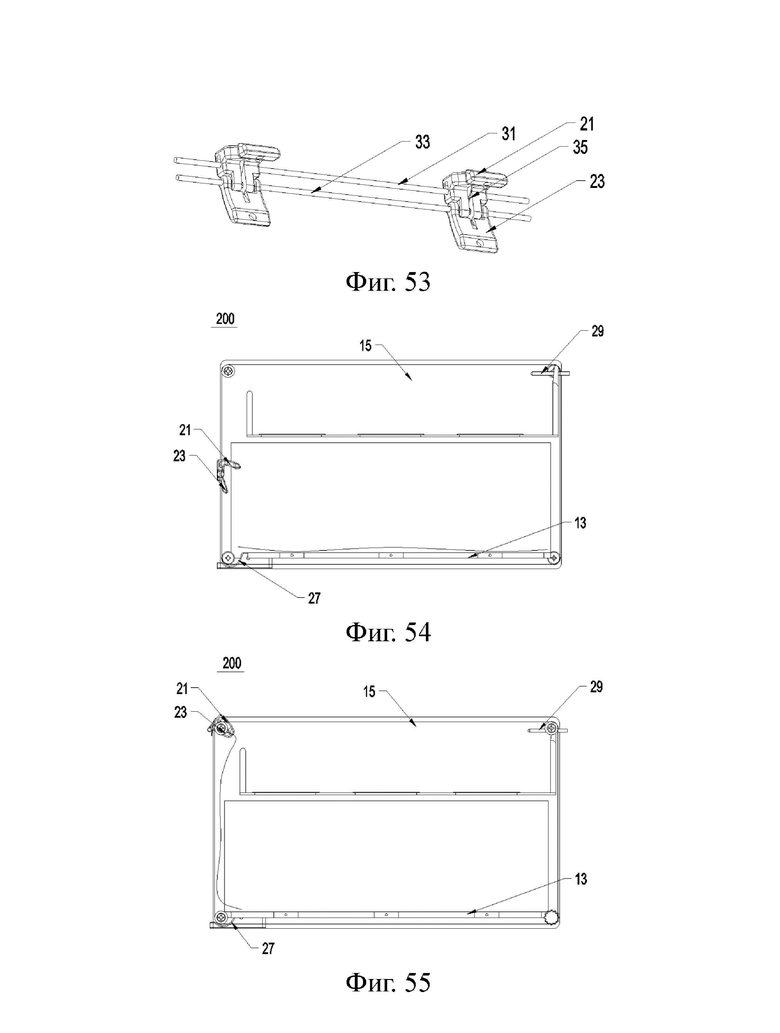
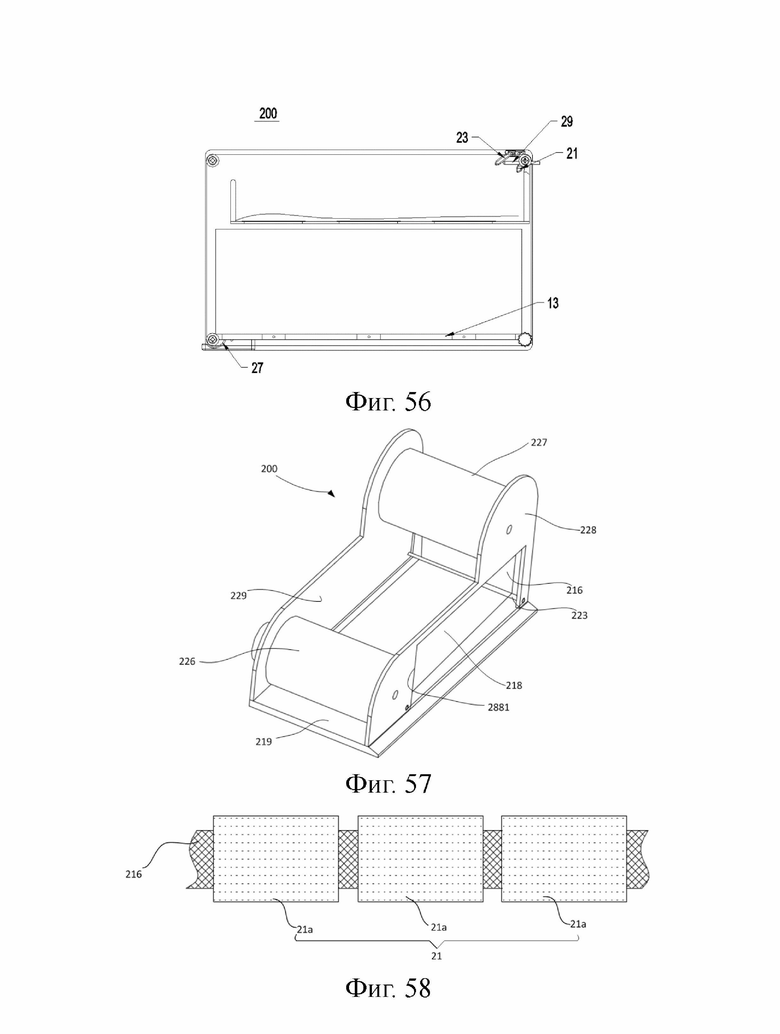
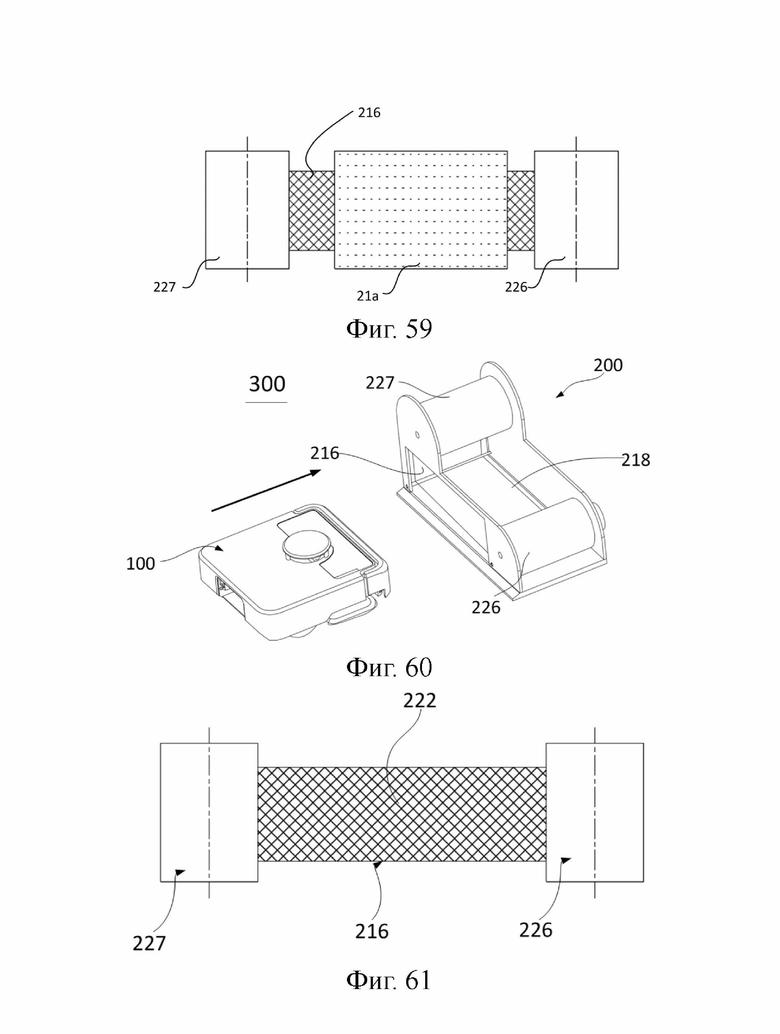
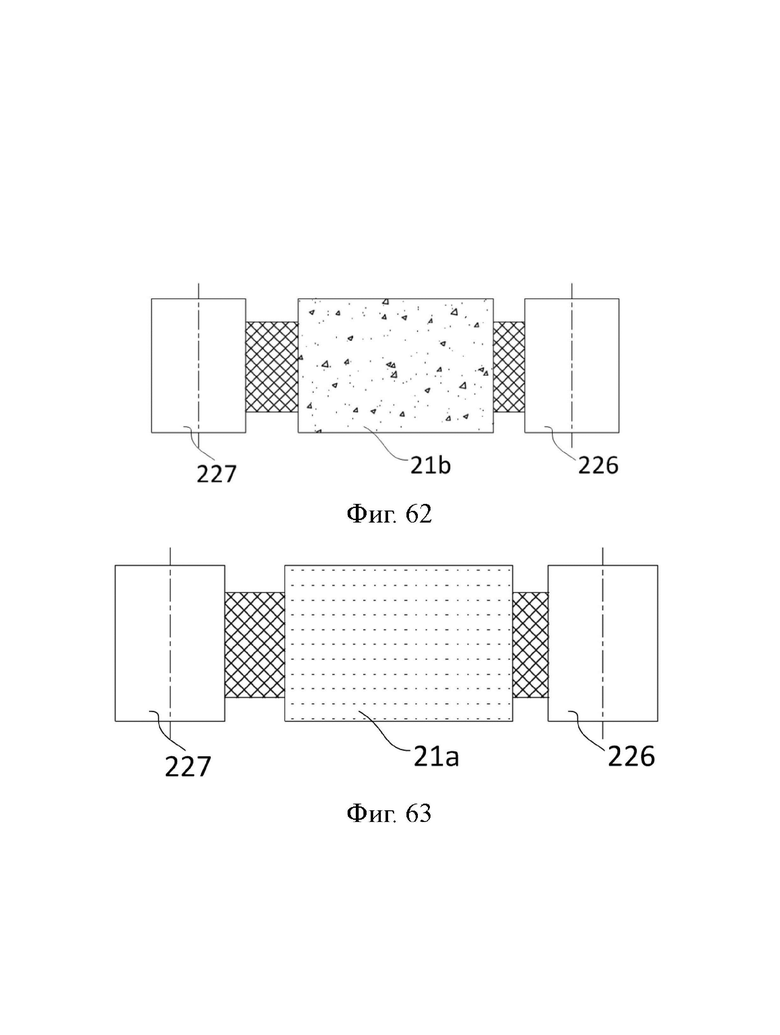
Настоящее изобретение относится к базовой станции для парковки робота-уборщика, при этом робот-уборщик включает в себя обтирочную платформу, к которой прикреплен гибкий обтирочный материал с возможностью замены для образования обтирочной поверхности, чтобы протереть рабочую поверхность, по которой ходит робот-уборщик; базовая станция включает в себя: модуль хранения, предназначенный для хранения непрерывных основных обтирочных материалов; модуль подачи, перемещающий свободный конец основного обтирочного материала до места отрывания, чтобы свободный конец оторвался от упомянутого основного обтирочного материала, образуя при этом упомянутый обтирочный материал. Настоящее изобретение имеет следующие положительные эффекты: после возвращения робота-уборщика на базовую станцию осуществляется автоматическая установка обтирочного материала без вмешательства пользователя. 2 н. и 13 з.п. ф-лы, 63 ил.
1. Система автоматической чистки (300), включающая в себя робот-уборщик (100), базовую станцию (200) и рабочий модуль (125, 400), отличающаяся тем, что:
упомянутый робот-уборщик (100) включает в себя корпус (101) и обтирочную платформу (122, 1201), съемным образом установленную на корпусе (101) для приема гибкого обтирочного материала, предназначенного для установки на упомянутой обтирочной платформе (122, 1201), образуя при этом обтирочную поверхность, чтобы обтирочная поверхность смогла воздействовать на рабочую поверхность для выполнения вытирания, когда робот-уборщик (100) перемещается по рабочей поверхности;
упомянутая базовая станция включает в себя рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, где упомянутая обтирочная платформа (122, 1201), отсоединенная от корпуса (101), устанавливает или отсоединяет обтирочный материал от упомянутой обтирочной платформы (122, 1201), отсоединенной от корпуса (101);
и упомянутый рабочий модуль (125, 400) установлен так, чтобы воздействовать на упомянутую обтирочную платформу (122, 1201), отсоединенную от корпуса (101), когда упомянутая обтирочная платформа (122, 1201), отсоединенная от корпуса (101), и упомянутый обтирочный материал расположены на рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, чтобы установить обтирочный материал на обтирочную платформу (122, 1201).
2. Система по п. 1, отличающаяся тем, что упомянутый рабочий модуль предназначен для установки упомянутого обтирочного материала на упомянутой обтирочной платформе (122, 1201), а также для отсоединения упомянутого обтирочного материала от упомянутой обтирочной платформы (122, 1201).
3. Система по п. 1 или 2, отличающаяся тем, что упомянутая базовая станция еще включает в себя разделительный модуль (422), воздействующий на упомянутую обтирочную платформу (122, 1201) и/или упомянутый обтирочный материал, чтобы отсоединить упомянутый обтирочный материал от упомянутой обтирочной платформы (122, 1201).
4. Система по п. 1, отличающаяся тем, что упомянутая базовая станция включает в себя приводной модуль и упомянутая система сконфигурирована таким образом, чтобы когда упомянутый робот-уборщик (100) возвращается на упомянутую базовую станцию (200), упомянутый робот-уборщик (100) отсоединил от упомянутого корпуса (101) упомянутую обтирочную платформу (122, 1201) с упомянутым обтирочным материалом, и упомянутый приводной модуль (207, 205, 412) переместил отсоединенную обтирочную платформу (122, 1201) с обтирочным материалом на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала, чтобы рабочий модуль (125, 400) отсоединил использованный обтирочный материал от обтирочной платформы (122, 1201).
5. Система по п. 4, отличающаяся тем, что упомянутая базовая станция включает в себя рабочую позицию обтирочной платформы, предназначенную для того, чтобы упомянутый робот-уборщик (100) установил или отсоединил упомянутую обтирочную платформу (122, 1201) с обтирочным материалом от упомянутого корпуса (101).
6. Система по п. 5, отличающаяся тем, что упомянутая рабочая позиция обтирочной платформы включает в себя монтажную позицию (2022) обтирочной платформы и разделительную позицию (2021) обтирочной платформы для монтажа и отсоединения обтирочной платформы (122, 1201) с обтирочным материалом от упомянутого корпуса (101), где по выбору упомянутая монтажная позиция (2022) обтирочной платформы и упомянутая разделительная позиция (2021) обтирочной платформы являются одной и той же позицией.
7. Система по п. 4, или 5, или 6, отличающаяся тем, что упомянутая рабочая позиция (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала расположена выше упомянутой рабочей позиции обтирочной платформы, и между упомянутой рабочей позицией (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала и упомянутой рабочей позицией обтирочной платформы образуется пространство для парковки упомянутого робота-уборщика (100).
8. Система по п. 1, отличающаяся тем, что рабочая позиция (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала на упомянутой базовой станции включает в себя разделительную позицию (4221) обтирочного материала и монтажную позицию (420) обтирочного материала, разделительная позиция (4221) обтирочного материала и монтажная позиция (420) обтирочного материала расположены на одной горизонтальной плоскости, так что приводной модуль (207, 205, 412) может приводить обтирочную платформу в перемещение между разделительной позицией обтирочного материала и монтажной позицией (420) обтирочного материала в горизонтальном направлении.
9. Система по п. 3, отличающаяся тем, что упомянутая базовая станция (200) включает в себя принимающий модуль (211, 15, 206, 240), предназначенный для приема обтирочного материала, отсоединенного от упомянутой обтирочной платформы (122, 1201).
10. Система по п. 9, отличающаяся тем, что упомянутая рабочая позиция (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала на упомянутой базовой станции включает в себя разделительную позицию (4221) обтирочного материала и монтажную позицию (420) обтирочного материала, отверстие упомянутого принимающего модуля (211, 15, 206, 240) расположено ниже разделительной позиции (217) обтирочного материала.
11. Система по п. 9, отличающаяся тем, что упомянутый принимающий модуль (211, 15, 206, 240) включает в себя камеру для извлечения (206), упомянутый разделительный модуль (422) установлен в отверстии упомянутой камеры для извлечения (206), выполнен в виде крючкообразной структуры и использован для зацепления обтирочного материала, чтобы снять обтирочный материал с обтирочной платформы (122, 1201).
12. Система по п. 1, отличающаяся тем, что упомянутый рабочий модуль (400) включает в себя одну подъемную пластину (411) и магнитный элемент, установленный на дне упомянутой подъемной пластины (411) для поднятия упомянутой обтирочной платформы (122, 1201).
13. Способ управления системой автоматической чистки по п. 1, отличающийся тем, что упомянутый способ включает в себя:
отсоединение упомянутой обтирочной платформы (122, 1201) от упомянутого робота-уборщика (100) на рабочей позиции (2021) упомянутой обтирочной платформы, приведение упомянутой обтирочной платформы, отсоединенной от робота-уборщика, в перемещение на рабочую позицию (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала;
отсоединение упомянутого обтирочного материала от упомянутой обтирочной платформы (122, 1201) на рабочей позиции (2021, 2022, 215, 217, 218, 13, 4221, 420) обтирочного материала; и замену упомянутого обтирочного материала.
14. Способ управления по п. 13 включает в себя перемещение робота-уборщика (100) по первому направлению на заранее установленное расстояние после отсоединения обтирочной платформы (122, 1201) от робота-уборщика (100), чтобы освободить место для перемещения обтирочной платформы.
15. Способ управления по п. 14, отличающийся тем, что отсоединение упомянутой обтирочной платформы от упомянутого робота-уборщика и установка упомянутой обтирочной платформы на роботе-уборщике происходят на одной и той же позиции, после монтажа обтирочного материала на упомянутой обтирочной платформе (122, 1201), робот-уборщик (100) перемещается по второму направлению на заранее установленное расстояние, противоположному первому направлению, чтобы возвратиться на рабочую позицию обтирочной платформы, и упомянутая обтирочная платформа (122, 1201) устанавливается на упомянутом роботе-уборщике (100).
| CN 107951448 A, 24.04.2018 | |||
| CN 206462947 U, 05.09.2017 | |||
| US2016227975 A1, 11.08.2016 | |||
| АВТОНОМНЫЙ ПЫЛЕСОС | 2012 |
|
RU2586197C2 |

