Изобретение относится к судовым навигационным приборам и предназначено для измерения скорости судов относительно водной среды.
Известен гидродинамический лаг с двухканальной приёмной трубкой [патент SU 201787 A1, МПК G01P 5/14 опубл. 08.09.1967 Бюл. № 18], в которой приёмник давлений с отверстиями динамического и статического напора выполнен в виде симметричного профиля с острыми кромками, переходящими в пластину у свободного конца данного приёмника. Приплюснутая форма приёмника давлений приёмной трубки лага позволяет получить следующие преимущества по сравнению с традиционной (цилиндрической) формой: устранение кавитации в районе приёмных отверстий динамического и статического напора, уменьшение вибрации, повышение точности и диапазона измеряемых скоростей. Однако его недостатками являются: засорение приёмной трубки и обрастание микроорганизмами внутренней её поверхности, необходимость периодического обслуживания данной трубки, а также пониженная чувствительность на малых ходах судна. Кроме того, из-за наличия крючкообразного конца пластины данному лагу свойственен ещё один существенный недостаток, заключающийся в том, что в процессе движения судна за него (крючкообразный конец) могут зацепиться плавающие концы рыбацких сетей или других канатов, верёвок (тросов) и пр. и погнуть эту пластину трубку и, соответственно, вывести лаг из строя.
Известен, например, гидродинамический (относительный) лаг, содержащий трубчатый приёмник статического давления, трубчатый приёмник полного давления и сильфонный аппарат с его стрелочной измерительной головкой (указателем) [Ермолаев Г.Г. Морское судовождение // Ермолаев Г.Г., Андронов Л.П., Зотеев Е.С., Кирин Ю.П., Черниев Л.Ф. – М.: Транспорт, 1970. – 375 с.]. Причем свободный конец трубчатого приёмника статического давления, расположенный в воде, является вертикально ориентированным, а свободный конец трубчатого приёмника полного давления, также расположенный в воде, является горизонтально ориентированным по направлению (навстречу) движению судна. Принцип действия этого лага основан на законах гидродинамики и уравнении Бернулли-Лагранжа, а именно на измерении разности давлений, которая зависит от скорости судна, и заключается в измерении гидродинамического давления, создаваемого скоростным напором набегающего потока воды при движении судна. В сильфонном аппарате при этом производится вычитание из полного давления, определяемого с помощью приёмника полного давления, давления статического, определяемого с помощью приёмника статического давления. Эта разность давлений, приложенная к мембране (диафрагме), заставляет двигаться соединенный с ней шток со стрелкой указателя, которая при этом отклоняется. По углу отклонения стрелки определяют скорость судна.
Несмотря на некоторые преимущества этого лага – конструктивную простоту и малую стоимость, ему свойственен ряд существенных недостатков:
– нелинейная погрешность, обусловленная дрейфом судна, его дифферентом, обрастанием корпуса, качкой;
– пониженная чувствительность на малых скоростях судна;
– значительные погрешности, обусловленные остаточными деформациями мембраны сильфонного аппарата;
– необходимость периодического проведения профилактических работ (очистка трубопроводов и сильфонного аппарата от отложений и биообрастаний, корректировка указателя при смещении нуля);
– изменение упругих свойств мембраны (диафрагмы) с течением времени, её износ и потеря герметичности;
– сравнительно большие массогабаритные показатели, обусловленные наличием протяженных трубчатых приёмников статического и полного давления соответственно со множеством их изгибов.
Смещение нуля – это показание средства измерений, отличное от нуля, при входном сигнале, равном нулю.
Известен, например, гидродинамический лаг [патент SU 987528 A1, МПК G01P 5/08 опубл. 07.01.1983 Бюл. № 1], содержащий приёмники и преобразователи полного и статического давлений и регистрирующее устройство. Причём в качестве преобразователей данных давлений применены туннельные диоды, помещённые в камеры полного и статического давлений соответственно, и включенные при этом в параллельные плечи мостовой схемы, вход которой соединён с генератором пилообразного напряжения, а выход соединён с регистрирующим устройством. Данному изобретению свойственны следующие недостатки. Во-первых, внешние механические воздействия на любые полупроводниковые приборы, в том числе и туннельные диоды, неизбежно приводят к снижению их надежности. Во-вторых, ввиду того, что разница давлений в камерах полного и статического давлений сравнительно невелика (порядка нескольких десятков кПа), а её изменение происходит достаточно медленно (по мере плавного роста или снижения скорости судна), то чувствительность и точность данного лага также невелики. По этим причинам, несмотря на достаточно простую конструкцию, подобные лаги на основе полупроводниковых объёмночувствительных преобразователей давления не нашли применения.
Известен также гидродинамический лаг [Алхименко С.И. Схема построения со-временного гидродинамического лага / Алхименко С.И., Аракелян А.А., Артемьев А.В., Жигалов. Т.Е. // Молодёжь, наука, инновации. – Владивосток: МГУ им. адм. Г.И. Невельского. – 2021. – т.1 – с. 41-45], принятый за прототип, содержащий трубку с приёмником давлений, расположенном на свободном её конце, на котором установлены два миниатюрных датчика (измерительных преобразователя) давления, выполненных по MEMS-технологии, например, типа MS5837-30ВА, один из которых установлен на боковой поверхности этого приёмника и ориентирован вдоль диаметральной плоскости судна по направлению его движению. А другой датчик (измерительный преобразователь) установлен в торцевой части этого приёмника в герметичной его заглушке и является вертикально ориентированным. Лаг также содержит блок управления, электрически связанный с данными датчиками, полупроводниковый преобразователь напряжения и интерфейс связи. Благодаря применению миниатюрных датчиков типа MS5837-30ВА данный лаг практически полностью свободен от недостатков вышеописанных гидродинамических лагов по источнику [Ермолаев Г.Г. Морское судовождение // Ермолаев Г.Г., Андронов Л.П., Зотеев Е.С., Кирин Ю.П., Черниев Л.Ф. – М.: Транспорт, 1970. – 375 с.] и по патенту SU 987528 A1. Например, его максимально разрешение составляет 0,2 миллибар (мбар), а время преобразования датчика не превышает 0,5 мс. Однако данному лагу свойственен один существенный недостаток: достаточно большая погрешность по измерению статического давления, причём квадратично зависимая от скорости судна. Этот недостаток обусловлен конструкцией чувствительного элемента лага, а именно тем фактом, что при линейном изменении скорости хода судна скорость так называемого граничного с боковой поверхностью приёмника давлений слоя воды изменяется нелинейно. В связи с чем, в соответствии с законом Бернулли, изменяется и действующее на установленный на этой поверхности датчик давления потока воды.
Закон Бернулли гласит, в тех участках течения жидкости или газа, где скорость больше, давление меньше, и наоборот, с увеличением давления жидкости, протекающей в трубе, скорость ее движения уменьшается.
Кроме того, возрастание погрешности измерения скорости судна при росте его скорости обусловлено и ростом турбулентности (турбулентных потоков) в окрестности расположенного в воде приёмника давлений с её датчиками.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в устранении указанного недостатка, а именно: повышение точности измерения скорости судна.
Поставленная задача достигается тем, что в известном гидродинамическом лаге, содержащем трубку с закрытым герметичной заглушкой приёмником давлений, расположенном на свободном её конце, на котором установлены миниатюрные датчики давления; блок управления, электрически связанный с данными датчиками, а также полупроводниковый преобразователь напряжения и интерфейс связи, в отличие от него в заявляемом гидродинамическом лаге приёмник давлений выполнен в виде плоскоовальной трубы, на больших плоских сторонах которой установлено вровень с внешними поверхностями по одному миниатюрному датчику, каждый из которых ориентирован вдоль плоскости мидель-шпангоута, а на меньшей закруглённой стороне которой установлен аналогичным образом третий миниатюрный датчик, но ориентированный вдоль диаметральной плоскости судна по направлению его движению, причём расположены все эти датчики на одном уровне.
Блок управления выполнен на микроконтроллере STM32.
Благодаря тому, что приёмник давлений выполнен в виде плоскоовальной трубы, (которая может быть выполнена с достаточно большим (10…20) соотношением сторон) меньшая сторона которой достаточно мала (9…12) мм, т.е. соизмерима с размерами датчика, практически отсутствуют в его окрестности турбулентности. При этом скорость граничного с каждой большой плоской стороной приёмника давлений слоя воды имеет такую же скорость, как и скорость судна. А погрешность гидродинамического лага практически не зависит от скорости судна.
Благодаря тому, что датчики давлений расположены на одном уровне, отсутствует постоянная погрешность датчика полного давления за разность статического давления между датчиками полного о и статического давления.
За счёт того, что блок управления выполнен на микроконтроллере STM32, достигается ряд дополнительных преимуществ заявляемого лага: малая стоимость, низкое электропотребление (менее 1,0 мА при напряжении питания 5,5 В и тактовой частоте 4 МГц) и высокая надёжность.
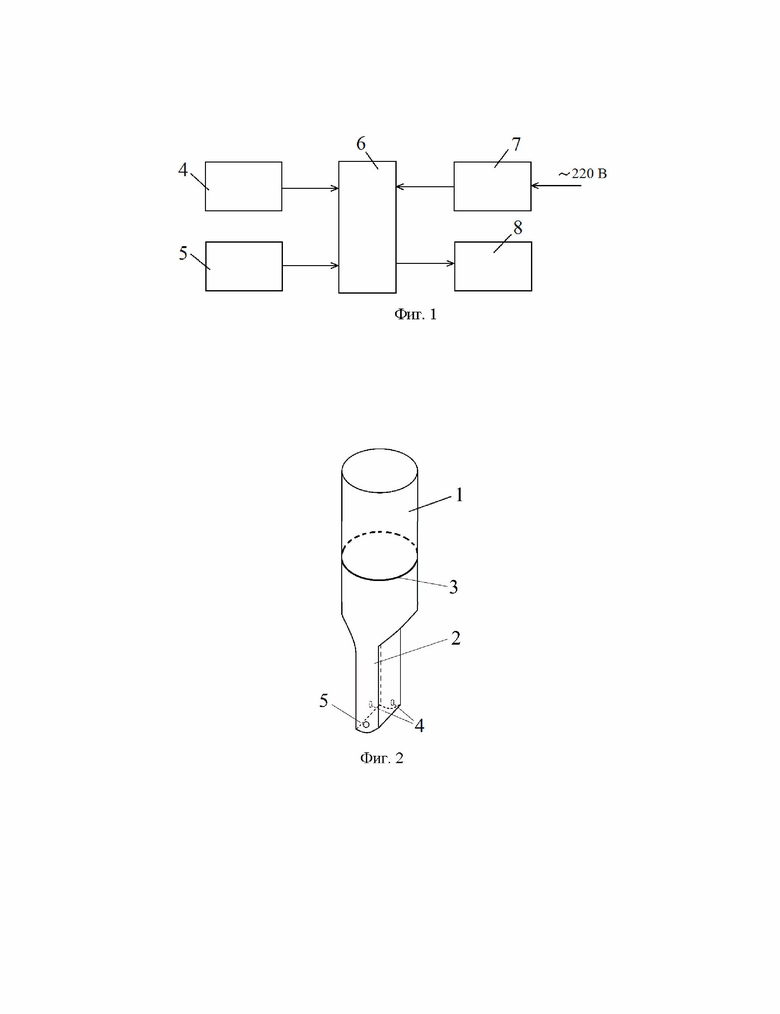
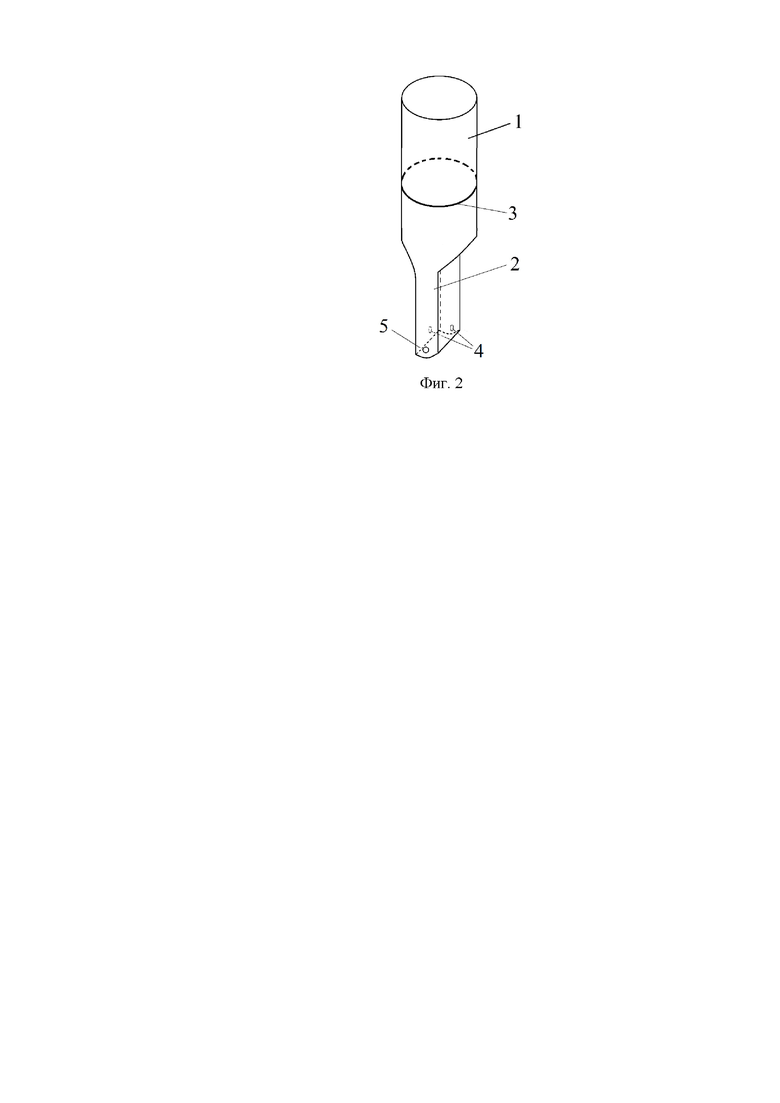
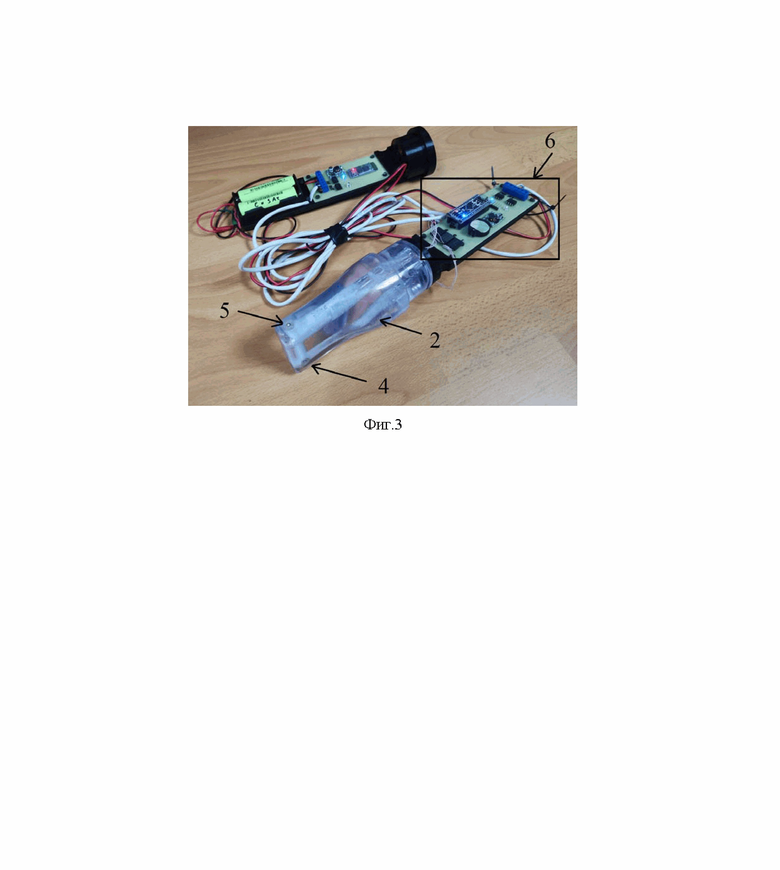
Заявляемое изобретение иллюстрируется: фиг. 1 – Структурная схема гидродинамического лага; фиг. 2 – Внешний вид гидродинамического лага; фиг. 3 – Фотография физической реализации заявляемого лага.
Заявляемый гидродинамический лаг (фиг. 1, фиг. 2) содержит трубку (1) с закрытым герметичной заглушкой (не показано) приёмником давлений (2) в виде плоскоовальной трубы, расположенном на свободном её конце (3), на больших плоских сторонах ко-торой установлено заподлицо (вровень) с внешними поверхностями по одному миниатюрному датчику (4), каждый из которых ориентирован вдоль плоскости мидель-шпангоута судна (не показано), а на меньшей закруглённой стороне которой установлен аналогичным образом (заподлицо (вровень) с внешней её поверхностью) третий миниатюрный датчик (5), но ориентированный вдоль диаметральной плоскости судна по направлению его движению, причём расположены все эти датчики на одном уровне. Также содержит блок управления (6), электрически связанный с данными датчиками (4) и (5), полупроводниковый преобразователь напряжения (7), служащий источником его питания, на вход которого подано напряжение сети постоянного тока 24 В, и интерфейс связи (8). Интерфейс связи (8) связан с выходом данного микроконтроллера (6) и традиционно служит для передачи данных на судовую приборную панель (не показано) по проводному каналу. А датчики (4) служат для измерения давления статического, а датчик (5) служит для измерения давления полного. Установка двух датчиков (4) позволяет повысить точность измерения статического давления путём осреднения снимаемых с них данных.
Заявляемое изобретение используют следующим образом. Выстреливают трубку (1) за пределы пограничного слоя судна через динамический клинкет (не показано). Подают питание от судовой сети 24 В на полупроводниковый преобразователь напряжения (7). При движении судна, информация о статическом и полном давлениях, измеряемых данными датчиками (4) и (5) в цифровом виде передается в блок управления (6). Блок управления (6) вычисляет скорость судна и передает информацию о этой скорости в интерфейс связи (8). А интерфейс связи (8), в свою очередь, передаёт данные на судовую приборную панель (не показано), на которой отображается скорость судна в аналоговой или цифровой форме в узлах или других единицах измерения.
Для доказательства работоспособности заявляемого лага был собран экспериментальный его образец (фиг. 3), а также проведено гидродинамическое моделирование прототипного и заявляемого лагов в программе SolidWorks, которое показало, что погрешность последнего при скорости судна равной 20 узлов меньше в 13 раз.
Таким образом, благодаря использованию недорогих компактных и надёжных из-мерительных преобразователей, обладающих хорошим разрешением и достаточно высоким быстродействием, установленных в приёмнике давлений, выполненном при этом в виде плоскоовальной трубы, имеющей форму обычной щелевой насадки пылесоса с сужающимся профилем, но закрытой герметичной заглушкой, а также недорогих компонентов блока управления с низким энергопотреблением, обеспечивается решение постав-ленной задачи. Выполненные таким образом гидродинамические лаги могут выйти на новый уровень развития и составить конкуренцию индукционным лагам. При необходимости блок управления (6), полупроводниковый преобразователь напряжения (7) и интерфейс связи (8) могут быть помещены в трубку (1). В этом случае лаг будет представлять собой компактный моноблок, удобный для хранения и транспортировки. А замена вышедшего из строя лага может быть произведена в считанные минуты.
Изобретение относится к судовым навигационным приборам и предназначено для измерения скорости судов относительно водной среды. Гидродинамический лаг содержит приёмник давлений, выполненный в виде плоскоовальной трубы, на больших плоских сторонах которой установлено вровень с внешними поверхностями по одному миниатюрному датчику, каждый из которых ориентирован вдоль плоскости мидель-шпангоута, а на меньшей закруглённой стороне которой установлен аналогичным образом третий миниатюрный датчик, но ориентированный вдоль диаметральной плоскости судна по направлению его движению, причём расположены эти датчики на одном уровне. Технический результат – повышение точности измерения скорости судна, компактность и простота замены лага. 1 з.п. ф-лы, 3 ил.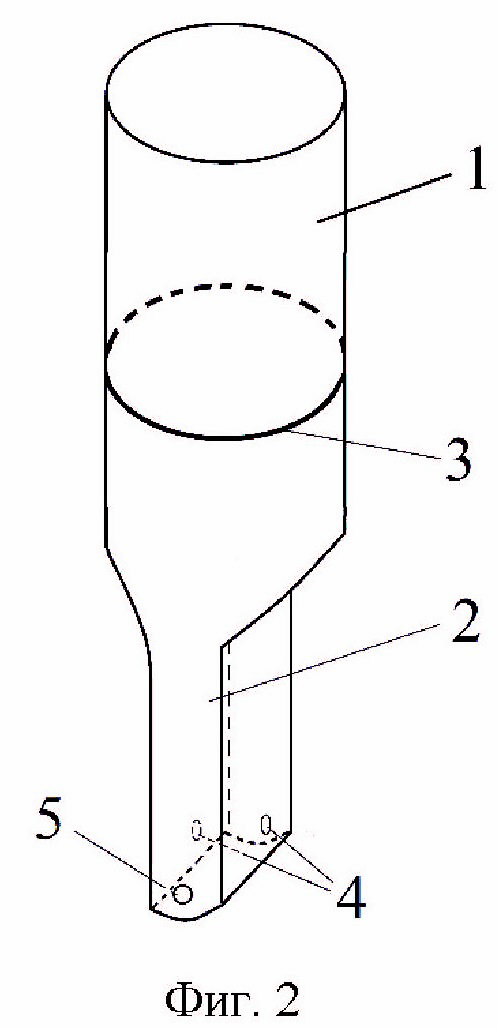
1. Гидродинамический лаг, содержащий трубку с закрытым герметичной заглушкой приёмником давлений, расположенным на свободном её конце, на котором установлены миниатюрные датчики давления; блок управления, электрически связанный с данными датчиками, а также полупроводниковый преобразователь напряжения и интерфейс связи, отличающийся тем, что приёмник давлений выполнен в виде плоскоовальной трубы, на больших плоских сторонах которой установлено вровень с внешними поверхностями по одному миниатюрному датчику, каждый из которых ориентирован вдоль плоскости мидель-шпангоута, а на меньшей закруглённой стороне которой установлен аналогичным образом третий миниатюрный датчик, но ориентированный вдоль диаметральной плоскости судна по направлению его движению, причём расположены эти датчики на одном уровне.
2. Гидродинамический лаг по п. 1, отличающийся тем, что блок управления выполнен на микроконтроллере STM32.
| Алхименко С.И., Аракелян А.А | |||
| и др | |||
| Схема построения современного гидродинамического лага | |||
| Молодёжь | |||
| Наука | |||
| Инновации | |||
| - Владивосток: Морской государственный университет им | |||
| адм | |||
| Г.И | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Механический грохот | 1922 |
|
SU41A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И УГЛА СКОСА ПОТОКА ЖИДКОСТИ И КОМБИНИРОВАННЫЙ ПРИЕМНИК СКОРОСТИ И УГЛА СКОСА | 1997 |
|
RU2197740C2 |
| Устройство гидродинамического лага для передачи давления | 1970 |
|
SU319275A1 |
| CN 210180592 U, 24.03.2020. | |||

