Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения подводных объектов при мультистатической гидролокации.
Как известно [1,2], мультистатическая (многопозиционная) гидролокация отличается от моностатической тем, что гидроакустические излучатели и гидроакустические приёмники разнесены в пространстве, чем достигается повышение дистанции обнаружения подводных объектов. При использовании одного излучателя и одного приёмника, разнесённых в пространстве, гидролокация называется бистатической.
Применение мультистатической гидролокации особенно актуально при поиске подводных лодок (ПЛ) авиационными радиогидроакустическими системами [3]. Данный поиск состоит в постановке противолодочным самолётом поля радиогидроакустических буёв (РГБ), которые должны обнаружить ПЛ при преодолении поля РГБ и факт обнаружения вместе с координатами и желательно параметрами движения по радиоканалу сообщить на самолёт.
До последнего времени для решения задачи использовались в основном пассивные РГБ. Однако ввиду неуклонного снижения шумности ПЛ дистанция их обнаружения при помощи РГБ постоянно сокращается, что требует повышать плотность поля буёв и приводит к повышению стоимости поисковой операции. Ввиду этого в последние годы наметилась устойчивая тенденция к переходу на поиск ПЛ в активном мультистатическом режиме, в котором применяются ненаправленные (всенаправленные) излучающие РГБ и направленные приёмные РГБ.
При переходе к мультистатическому поиску возникла необходимость непрерывного определения ориентации приемной антенны относительно направления на географический север, т.к. приемные антенны РГБ, поддерживаясь плавучестью на заданной глубине, свободно вращаются вокруг вертикальной оси. Учитывая требования к малой стоимости и ограниченный объем для размещения аппаратуры внутри корпуса РГБ, в качестве аппаратуры ориентации используется простейший магнитный компас, обладающий низкой точностью определения направления, причём существенно зависящей от географической широты. В высоких широтах точность, обеспечиваемая магнитным компасом, становится неприемлемой, что является проблемой при решении задач в мультистатическом режиме.
При поиске ПЛ в режиме мультистатической гидролокации, когда излучающие и приёмные РГБ разнесены на большое расстояние, значительные ошибки при определении пеленга обнаруженной ПЛ не позволяют определить дистанцию до неё и направление её движения.
При поиске в пассивном режиме данная проблема существовала, но не была решающей, поскольку при обнаружении ПЛ конкретным РГБ с небольшой дистанцией обнаружения было ясно, что ПЛ находится в малой окрестности буя и конкретное направление на неё не является необходимым, ввиду того, что траектория движения ПЛ успешно восстанавливается по последовательности срабатывания отдельных РГБ, координаты которых могут быть определены с использованием приемников спутниковой навигационной системы (СНС), установленных на РГБ, либо путём пеленгования РГБ с использованием протяжённой антенны, установленной на самолёте [3].
При поиске ПЛ в режиме мультистатической гидролокации, когда излучающие и приёмные РГБ разнесены на большое расстояние, значительные ошибки при определении пеленга обнаруженной ПЛ не позволяют определить дистанцию до неё и направление её движения.
Учитывая сказанное, актуальной является задача, как в режиме мультистатической гидролокации с высокой точностью определить координаты и параметры движения обнаруженного подводного объекта без аппаратуры определения ориентации в пространстве приёмных антенн РГБ (активные РГБ, являясь ненаправленными, в ориентации не нуждаются).
Применение мультистатической гидролокации [1,2] и радиолокации [4,5] для решения разных задач широко известно. В работе [6] рассматривается задача освещения подводной обстановки с использованием гидроакустического комплекса ПЛ в качестве излучателя и поля РГБ в качестве приёмников. В работе [7] для устранения неоднозначности пеленга обнаруженной цели, свойственной линейным буксируемым антеннам, предлагается использовать 2 корабля, оснащённых гидроакустическими станциями с гибкими протяжёнными буксируемыми антеннами, и обнаруживать цели в режиме бистатической гидролокации. В работе [8] рассматривается система, состоящая из разнесённых в пространстве направленного приёмоизлучателя и направленного приёмника при условии, что цель находится вне зоны видимости приёмника. Ввиду этого приёмник обнаруживает эхосигнал, отражённый не от цели, а от приёмоизлучателя. Во всех перечисленных аналогах приёмники считаются ориентированными в пространстве, т.е. названная выше проблема передними не стоит.
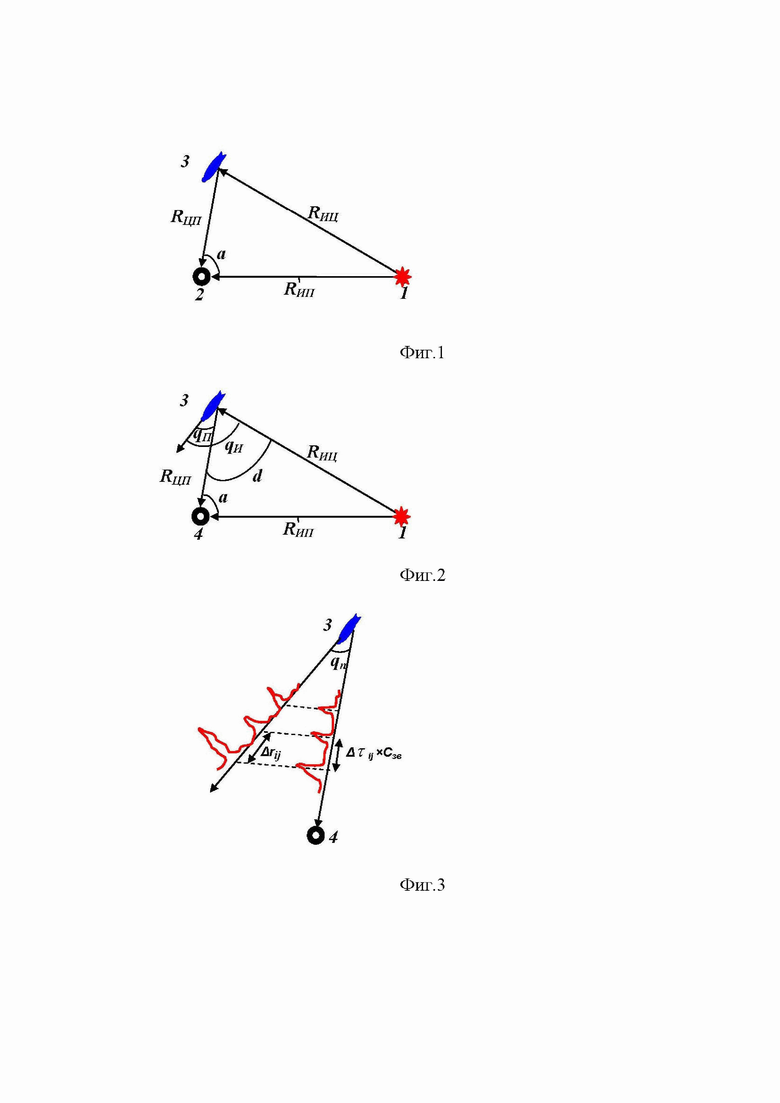
В качестве способа-прототипа выбран способ определения координат цели, описанный в работе [4, с.33-34]. Способ-прототип проиллюстрирован на фиг.1, на котором:
1 – ненаправленный излучатель (далее - излучатель);
2 – направленный приёмник, ориентированный в пространстве;
3 – цель;
 – расстояние между излучателем и приёмником;
– расстояние между излучателем и приёмником;
 – расстояние между излучателем и целью;
– расстояние между излучателем и целью;
 – расстояние между целью и приёмником;
– расстояние между целью и приёмником;
 – угол с вершиной в местоположении приёмника между пеленгами на излучатель и цель.
– угол с вершиной в местоположении приёмника между пеленгами на излучатель и цель.
Способ-прототип заключается в следующем. Имеются разнесённые в пространстве и стационарно установленные с известными координатами ненаправленный излучатель 1 и приёмник 2 с направленной антенной. Причём приёмник пространственно ориентирован, т.е. оборудован средствами инерциальной навигации, обеспечивающими контроль текущего направления на географический север.
Излучатель 1 излучает зондирующий сигнал (ЗС), который отражается от цели 3. Приёмник 2 принимает ЗС, измеряет и запоминает пеленг  и время
и время  его приёма. Затем принимает эхосигнал (ЭС), измеряет и запоминает пеленг
его приёма. Затем принимает эхосигнал (ЭС), измеряет и запоминает пеленг  и время
и время  его приёма.
его приёма.
С использованием измеренных данных формируется система уравнений
где
 - разность времён приёма эхосигнала и зондирующего сигнала;
- разность времён приёма эхосигнала и зондирующего сигнала;
 - разность пеленгов приёма эхосигнала и зондирующего сигнала;
- разность пеленгов приёма эхосигнала и зондирующего сигнала;
 – скорость звука в воде.
– скорость звука в воде.
Первое уравнение в (1) связывает между собой расстояния, пройденные эхосигналом и зондирующим сигналом с разностью времён их обнаружения. Второе уравнение связывает между собой длины сторон треугольника 1-2-3 с углом  в соответствии с теоремой косинусов.
в соответствии с теоремой косинусов.
Подставляя 1-е уравнение во 2-е, получим:

Учитывая, что  и
и  определены, а
определены, а  рассчитывается исходя из известных географических координат излучателя и приёмника, из (2) определяется расстояние (дистанция) между целью и приёмником
рассчитывается исходя из известных географических координат излучателя и приёмника, из (2) определяется расстояние (дистанция) между целью и приёмником  :
:

В результате получен пеленг цели и дистанция до неё относительно приёмника.
Недостатками способа прототипа являются:
- для его реализации приёмник должен быть ориентирован в пространстве;
- способ не позволяет определить курс и скорость цели.
Решаемая техническая проблема – совершенствование поиска подводных объектов мультистатической системой подводного наблюдения.
Технический результат – определение координат (пеленга и дистанции) и параметров движения (курса и скорости) цели одним приёмником мультистатической системы гидролокации за один цикл излучения зондирующего сигнала при неизвестной угловой ориентации приёмника в пространстве.
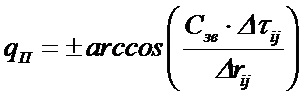
Заявляемый способ проиллюстрирован на фиг.2, на котором:
4 – направленный приёмник, не ориентированный в пространстве и определяющий направление в локальной системе координат, центр которой совмещен с центром приемной антенны (далее - приемник);
 – курсовой угол цели относительно приёмника;
– курсовой угол цели относительно приёмника;
 – курсовой угол цели относительно излучателя;
– курсовой угол цели относительно излучателя;
d – разность курсовых углов цели относительно направлений на излучатель и приёмник.
Реализация заявляемого способа состоит в следующем:
- Ненаправленный (всенаправленный) излучатель 1 излучает зондирующий сигнал (ЗС).
- Направленный приёмник 4 принимает ЗС, измеряет направление  и время приёма ЗС, а также запоминает сам ЗС
и время приёма ЗС, а также запоминает сам ЗС  .
.
- Затем направленный приёмник 4 принимает эхосигнал (ЭС), отражённый от цели 3, измеряет направление  и время приёма ЭС, а также запоминает сам ЭС
и время приёма ЭС, а также запоминает сам ЭС 
- С использованием полученных данных определяются текущие координаты цели в пространстве. Это достигается следующим образом:
- вычисляется разность направлений прихода ЭС и ЗС
- вычисляется разность времён приёма ЭС и ЗС
При этом предполагается, что приёмник на интервале между приёмом ЗС и ЭС не изменил своей угловой ориентации, что соответствует действительности, поскольку интервал между приёмом ЗС и ЭС не превышает единиц секунд, а экспериментально установлено, что при принятии соответствующих аппаратных решений (оборудование РГБ демпфером в виде паруса из ткани и микромеханическими акселерометрами) максимальная не учитываемая скорость вращения РГБ вокруг своей вертикальной оси не превышает единиц градусов в минуту;
- вычисляются пеленг  и дистанция
и дистанция  излучателя относительно приёмника:
излучателя относительно приёмника:
где
 – известные (рассчитанные с использованием сигналов спутниковой навигационной системы) географические координаты приёмника в некоторой местной декартовой системе координат, в которой ось
– известные (рассчитанные с использованием сигналов спутниковой навигационной системы) географические координаты приёмника в некоторой местной декартовой системе координат, в которой ось  направлена на север, а ось
направлена на север, а ось  – на восток;
– на восток;
 – известные (рассчитанные с использованием сигналов спутниковой навигационной системы) географические координаты излучателя в той же системе координат;
– известные (рассчитанные с использованием сигналов спутниковой навигационной системы) географические координаты излучателя в той же системе координат;
- вычисляется пеленг цели относительно приёмника
Знак в правой части формулы (7) определяется, исходя из того, что на практике известно, с какой стороны цель приближается к барьеру из РГБ;
- по формуле (3) вычисляется дистанция до цели относительно приёмника.
1) Если осуществляется поиск ПЛ известного проекта и если разрешающая способность ЗС по дальности не превышает единиц метров, определяются курс и скорость цели. Это реализуется следующим образом:
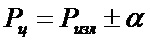
- определяется курсовой угол цели относительно приёмника , для чего вычисляется взаимно-корреляционная функция (ВКФ) ЗС и ЭС  :
:
где
 – длительность ЗС;
– длительность ЗС;
 – аргумент взаимно-корреляционной функции;
– аргумент взаимно-корреляционной функции;
 – аргумент зондирующего и эхосигналов.
– аргумент зондирующего и эхосигналов.
В ВКФ (показанной красным цветом на фиг.3) выделяются узкополосные максимумы, обусловленные отражениями от характерных блестящих точек цели, и измеряются разности их абсцисс  (т.е. запаздывания прихода на приёмник ЭС, отражённых от
(т.е. запаздывания прихода на приёмник ЭС, отражённых от  -й и
-й и  -й блестящих точек - отражателей). В случае ПЛ характерными блестящими точками (отражателями) являются нос, рубка и кормовое оперение [9]. При известном проекте ПЛ расстояния
-й блестящих точек - отражателей). В случае ПЛ характерными блестящими точками (отражателями) являются нос, рубка и кормовое оперение [9]. При известном проекте ПЛ расстояния  между характерными -й и -й блестящими точками (отражателями) вдоль диаметральной плоскости известны. Поскольку относительные запаздывания прихода эхосигналов от отражателей во взаимно-корреляционной функции зависят от курсового угла цели относительно приёмника (что показано на фиг.3 красным цветом), это позволяет определить курсовой угол цели относительно приёмника по формуле:
между характерными -й и -й блестящими точками (отражателями) вдоль диаметральной плоскости известны. Поскольку относительные запаздывания прихода эхосигналов от отражателей во взаимно-корреляционной функции зависят от курсового угла цели относительно приёмника (что показано на фиг.3 красным цветом), это позволяет определить курсовой угол цели относительно приёмника по формуле:
где  и
и  - номера наиболее удалённых друг от друга отражателей.
- номера наиболее удалённых друг от друга отражателей.
Для повышения точности используется разность между наиболее удалёнными друг от друга блестящими точками. Знак в правой части формулы (9) определяется по стороне изменения пеленга цели при излучении нескольких ЗС;
- определяется курс цели  :
:
 -
-
- определяется скорость цели  , что достигается следующим образом:
, что достигается следующим образом:
o при мультистатической локации доплеровское преобразование спектра ЗС в спектр ЭС имеет вид

где
 – комплексный спектр эхосигнала;
– комплексный спектр эхосигнала;
 – передаточная характеристика канала распространения ЗС от излучателя к приёмнику, величина которой не влияет на решаемую задачу;
– передаточная характеристика канала распространения ЗС от излучателя к приёмнику, величина которой не влияет на решаемую задачу;
 – комплексный спектр ЗС, преобразованный под воздействием эффекта Доплера;
– комплексный спектр ЗС, преобразованный под воздействием эффекта Доплера;
 - курсовой угол цели относительно излучателя и приёмника соответственно;
- курсовой угол цели относительно излучателя и приёмника соответственно;
 - доплеровский параметр, определяемый в виде
- доплеровский параметр, определяемый в виде
Формула (12) показывает, что ЗС подвергается эффекту Доплера дважды: сначала при падении на цель под углом  , а затем при отражении от неё под углом
, а затем при отражении от неё под углом  .
.
Величину доплеровского параметра  можно определить из следующего условия: корреляция ЭС и ЗС является максимальной, если ЗС преобразован с использованием доплеровского параметра, определяемого по формуле (12). Для этого вычислим корреляцию ЭС и ЗС, преобразованного с использованием разных величин доплеровского параметра , перебираемых от 1 до величины
можно определить из следующего условия: корреляция ЭС и ЗС является максимальной, если ЗС преобразован с использованием доплеровского параметра, определяемого по формуле (12). Для этого вычислим корреляцию ЭС и ЗС, преобразованного с использованием разных величин доплеровского параметра , перебираемых от 1 до величины  с шагом
с шагом  :
:
где
 – граничные частоты полосы частот ЗС;
– граничные частоты полосы частот ЗС;
 – частота и длительность ЗС;
– частота и длительность ЗС;
 - максимально возможная скорость цели;
- максимально возможная скорость цели;
 – сопряжённый комплексный спектр эхосигнала;
– сопряжённый комплексный спектр эхосигнала;
 – комплексный спектр ЗС, преобразованный в соответствии с величиной доплеровского параметра ;
– комплексный спектр ЗС, преобразованный в соответствии с величиной доплеровского параметра ;
 – частота.
– частота.
Определим величину доплеровского параметра как соответствующую максимуму функции  .
.
Определив доплеровский параметр , найдём из (12) скорость цели, учтя, что  :
:
Единственный неизвестный в (14) параметр d, представляющий собой угол с вершиной в месте цели между направлениями на излучатель и приёмник, определяется из треугольника 1-2-3 на фиг.2 по теореме синусов, а расстояние между излучателем и целью  вычисляется из первого уравнения системы (1):
вычисляется из первого уравнения системы (1):

Таким образом, без учёта угловой ориентации приёмника по данным одного цикла излучения ЗС определены пеленг цели  , дистанция до неё
, дистанция до неё  , курс цели
, курс цели  и её скорость
и её скорость  .
.
Существенными отличиями заявляемого способа от способа прототипа является дополнительное определение при отсутствии угловой ориентации приёмника:
1) координат цели;
2) курса цели;
3) скорости цели.
Для оценки точности определения координат и параметров движения цели с помощью заявленного способа было проведено математическое моделирование решения задачи, которое позволило установить следующее:
На точность определения координат и параметров движения цели влияют среднеквадратические погрешности (СКП) определения:
текущих координат излучателя и приёмника;
моментов времени прихода ЗС и ЭС;
направлений прихода ЗС и ЭС;
расстояний между максимумами в ВКФ ЗС и ЭС;
доплеровского параметра;
скорости звука на глубине приёмника.
Типовыми значениями перечисленных СКП являются:
текущих координат излучателя и приёмника при использовании спутниковой навигационной системы 5…8 м;
моментов времени прихода ЗС и ЭС 0,5…1,0 мс;
направления прихода ЗС и ЭС 2°…3°;
расстояний между максимумами в ВКФ ЗС и ЭС 2…3 мс;
доплеровского параметра 0,03…0,05;
скорости звука 0,5…1,0 м/с.
При типовых значениях ошибок координаты и параметры движения цели определяются с СКП:
пеленга 2°…3°;
дистанции 7…10%;
курса 7°…9°;
скорости 0,8…1,2 м/с.
Приведённое обоснование и результаты моделирования заявляемого способа позволяют утверждать, что заявленный технический результат – определение координат и параметров движения цели одним приёмником мультистатической системы гидролокации за один цикл излучения зондирующего сигнала при неизвестной угловой ориентации приёмника в пространстве – можно считать достигнутым.
Источники информации
1. Урик Р. Дж. Основы гидроакустики // Л.: Судостроение. 1978.
2. Cox H. of bistatic active sonar. In "Undewater acoustic data processing" by Y.T.Chan (editor). Springer.1989.
3. Бородавкин А.Н., Богомолов А.П., Дурнев И.Н., Титков И.В. Радиогидроакустические системы морской авиации // ВУНЦ ВМФ "Военно-морская академия". Санкт-Петербург. 2022. 287 с.
4. Аверьянов В.Е. Разнесённые радиолокационные станции и системы // Минск: Наука и техника. 1978.
5. Черняк В.С. Многопозиционная радиолокация // М.: Радио и связь. 1993.
6. Патент РФ № 2555192.
7. Патент РФ № 2715409.
8. Патент РФ № 2751999.
9. Чернов В.П. Характеристики гидролокационного отражения сложных подводных объектов по результатам физического моделирования // Гидроакустика. 2022. Вып. 51 (3). С.50-60.
| название | год | авторы | номер документа |
|---|---|---|---|
| Корабль освещения подводной обстановки | 2018 |
|
RU2693767C1 |
| Способ обсервации подводного аппарата | 2021 |
|
RU2763114C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| Способ измерения шумности подводного аппарата | 2023 |
|
RU2801077C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| Мультистатическая система подводного наблюдения | 2019 |
|
RU2713005C1 |
| Способ позиционирования подводных аппаратов | 2019 |
|
RU2717161C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Способ гидролокационного обнаружения высокоскоростного малоразмерного объекта | 2020 |
|
RU2740158C1 |
Использование: изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения подводных объектов в системе мультистатической гидролокации. Технический результат: определение координат и параметров движения цели одним приёмником мультистатической системы гидролокации за один цикл излучения зондирующего сигнала при неизвестной угловой ориентации приёмника в пространстве. Сущность: пеленг и дистанция до обнаруженной цели определяются на основе измерения направленным пространственно неориентированным по углу приёмником разностей времён и направлений обнаружения зондирующего и эхосигналов с учётом известных координат излучателя и приёмника; курс и скорость цели определяются на основе измерения отстояния по времени между максимумами в эхосигнале, обусловленными отражением зондирующего сигнала от характерных блестящих точек (отражателей) цели, и определения доплеровского параметра эхосигнала относительно зондирующего сигнала. 3 ил.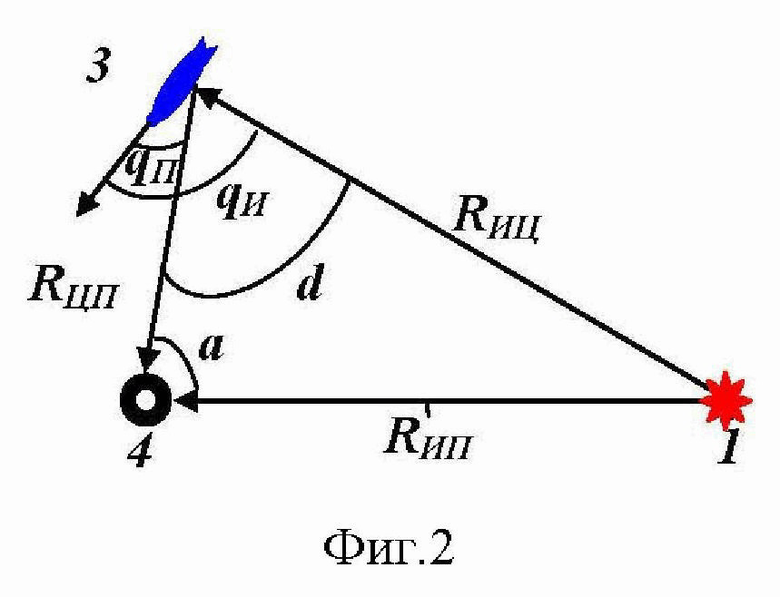
Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации, включающий излучение ненаправленным излучателем зондирующего сигнала, приём направленным приёмником зондирующего сигнала с измерением момента времени прихода зондирующего сигнала, приём тем же направленным приёмником эхосигнала, отражённого от цели, с измерением момента времени прихода эхосигнала, вычисление разности времён прихода эхосигнала и зондирующего сигнала  , определение координат цели с использованием измеренных параметров и известных координат излучателя и приёмника, отличающийся тем, что измеряют не ориентированным в пространстве направленным приёмником направления прихода зондирующего сигнала и эхосигнала, вычисляют разность
, определение координат цели с использованием измеренных параметров и известных координат излучателя и приёмника, отличающийся тем, что измеряют не ориентированным в пространстве направленным приёмником направления прихода зондирующего сигнала и эхосигнала, вычисляют разность  направлений прихода эхосигнала и зондирующего сигнала, с использованием известных географических координат излучателя и приёмника вычисляют пеленг излучателя относительно приёмника
направлений прихода эхосигнала и зондирующего сигнала, с использованием известных географических координат излучателя и приёмника вычисляют пеленг излучателя относительно приёмника  и расстояние между излучателем и приёмником
и расстояние между излучателем и приёмником  , вычисляют пеленг цели относительно приёмника
, вычисляют пеленг цели относительно приёмника  по формуле
по формуле
 ,
,
вычисляют дистанцию до цели относительно приёмника  по формуле
по формуле

где
 – скорость звука в воде,
– скорость звука в воде,
вычисляют взаимно-корреляционную функцию между зондирующим и эхосигналом с выделением в ней максимумов, обусловленных отражениями от характерных блестящих точек - отражателей цели, и измерением запаздываний  между наиболее удалённой парой блестящих точек, определяют курсовой угол цели относительно приёмника
между наиболее удалённой парой блестящих точек, определяют курсовой угол цели относительно приёмника  по формуле
по формуле
 ,
,
где  – известные расстояния вдоль диаметральной плоскости цели между
– известные расстояния вдоль диаметральной плоскости цели между  -й и
-й и  -й характерными блестящими точками (отражателями),
-й характерными блестящими точками (отражателями),
вычисляют курс цели  по формуле
по формуле
 ,
,
вычисляют зависимость величины корреляции эхосигнала и зондирующего сигнала от величины доплеровского параметра  по формуле
по формуле
 ,
,
где
 – частота;
– частота;
 – граничные частоты полосы частот зондирующего сигнала;
– граничные частоты полосы частот зондирующего сигнала;
 – сопряжённый комплексный спектр эхосигнала;
– сопряжённый комплексный спектр эхосигнала;
 – комплексный спектр зондирующего сигнала, преобразованный в соответствии с величиной доплеровского параметра ,
– комплексный спектр зондирующего сигнала, преобразованный в соответствии с величиной доплеровского параметра ,
определяют величину доплеровского параметра , соответствующего максимуму зависимости величины корреляции эхосигнала и зондирующего сигнала от величины доплеровского параметра ,
вычисляют скорость цели  по формуле
по формуле
 ,
,
где  – угол с вершиной в месте цели между направлениями на излучатель и приёмник, определяемый по формуле
– угол с вершиной в месте цели между направлениями на излучатель и приёмник, определяемый по формуле
 .
.
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| СПОСОБ ПОЛУАКТИВНО-ПАССИВНОГО БИСТАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛИ | 2020 |
|
RU2751999C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| Способ пассивного определения координат движущегося слабого источника излучения | 2019 |
|
RU2724315C1 |
| Устройство для транспортирования и складирования сыпучих материалов, выгружаемых из вагонов | 1947 |
|
SU75061A1 |
| US 20220350021 A1, 03.11.2022 | |||
| US 11016185 B1, 25.05.2021. | |||

