Изобретение относится к области радиотехники и связано с разработкой способа и устройства интегрированной информационной спутниковой системы (ИИСС), которые реализуют глобальную многопозиционную спутниковую радиолокацию земной поверхности и околоземного пространства, глобальную персональную связь, видеовещание и интерактивные услуги, включая широкополосный доступ в Интернет, и глобальную инфотелекоммуникационную транспортную сеть.
Известен способ получения разноракурсных радиолокационных изображений (РЛИ) земной поверхности, получаемых с помощью активно-пассивной многопозиционной радиолокации (МПР), заключающийся в том, что в составе активно-пассивной МПР используется одна приемопередающая и две приемные позиции [1]. Данный способ повышает скрытность функционирования приемной позиции и помехоустойчивость по отношению к источнику пассивных помех в виде уголковых отражателей. Основными недостатками данного способа являются:
- сложность согласованного управления узкими диаграммами направленности антенн (ДН) при наведении их на заданный участок земной поверхности,
- ограниченность пространственного наблюдения земной поверхности, обусловленная узкой полосой обзора,
- ограниченность функционального назначения - целевая решаемая задача заключается в получении РЛИ земной поверхности.
Наиболее близким по своей сущности к заявляемому изобретению является "Способ получения радиолокационного изображения земной поверхности при помощи многопозиционной системы с синтезированной апертурой антенны" [2]. Целью изобретения является повышение оперативности получения набора разноракурсных РЛИ на основе МПР с синтезом антенной апертуры (СА), а также повышение помехоустойчивости системы. Сущность способа заключается в том, что наблюдаемый участок земной поверхности облучают ортогональными сигналами от N передатчиков, на борту одного или нескольких носителей приемников осуществляют одновременный прием отраженных сигналов прямого распространения каждого из N передатчиков, выделяют из сигналов прямого распространения каждого из N передатчиков эфемеридную информацию о его носителе, информацию о бортовой шкале времени и параметрах ионосферы, выполняют с учетом этой информации попарную взаимно-корреляционную обработку принятых прямого и отраженного от земной поверхности сигналов, синтезируют одновременно N независимых разноракурсных РЛИ наблюдаемого участка земной поверхности. К основным недостатками данного способа можно отнести следующие.
1. Чрезмерная сложность реализации устройства, предложенного в [2] для исполнения данного способа глобальной радиолокации земной поверхности и околоземного пространства с использованием сигналов спутниковых радионавигационных систем ГЛОНАСС/GPS и орбитальной группировки приемных позиций космических аппаратов (КА) на низких орбитах, так как мощность навигационных сигналов, используемых в качестве зондирующих сигналов (с учетом расстояния навигационных спутников до земной поверхности до 19000 км), не достаточна для обеспечения вероятностных характеристик при решении заявленных задач.
2. Сложность согласованного управления узкими ДН приемных антенн во времени и пространстве при наведении их на заданный участок земной поверхности.
3. Ограниченность пространственного наблюдения земной поверхности.
Известен ряд систем пассивной радиолокации, работающих на сигналах сторонних источников: Silent Sentry (Lockheed Martin, США), Celldar (Великобритания), Homeland Alert 100 (США) [3], [4].
Система Lockheed Martin Silent Sentry - система для решения целевой задачи радиолокационного наблюдения, реализующая технологию пассивной радиолокации с использованием сигналов FM-передатчиков, сигналов аналоговых и цифровых эфирных телевизионных каналов. Недостаток системы - ограниченность области радиолокационного наблюдения и обнаружения воздушных целей (до 220 км) [3].
Система Celldar - система для решения целевой задачи радиолокационного наблюдения, обнаружения и идентификации объектов воздушного базирования и подвижных наземных объектов, реализующая технологию пассивной радиолокации с использованием сигналов системы подвижной связи сотового формата GSM. Недостаток системы - ограниченность области радиолокационного наблюдения и обнаружения воздушных целей (до 3 км) [4].
Система Homeland Alert 100 - пассивная когерентная система для решения целевой задачи радиолокационного обнаружения и наблюдения маловысотных воздушных целей, реализующая технологию пассивной радиолокации с использованием сигналов наземных УКВ радиовещательных станций, сигналов аналоговых ТВ-вещательных передатчиков, сигналов наземных цифровых ТВ-передатчиков. Недостаток системы - ограниченность области радиолокационного наблюдения и обнаружения воздушных целей (до 100 км) [4].
Известна полезная модель на устройство «Пассивный радиоэлектронный комплекс однопозиционного определения горизонтальных координат и элементов движения объекта методом линейной фильтрации Калмана-Бьюси» [5]. Цель полезной модели - сокращение времени однопозиционного определения горизонтальных координат и элементов движения объектов, неизлучающих активных радиолокационных сигналов, путем ускорения сходимости процесса вычисления дистанции при соблюдении скрытности работы.
К недостатку системы можно отнести ограниченность решаемой целевой задачи - радиолокационное наблюдение, решение которой основано на реализации технологии однопозиционной пассивной радиолокации, что снижает точность оценок кинематических параметров объектов наблюдения по отношению к технологии МПР.
Известен ряд спутниковых систем персональной связи (ССПС) с организацией пакетной передачи информации с использованием низкоорбитальных КА: Globalstar, Iridium.
Целевая задача ССПС Globalstar - обеспечение персональной связи. Недостаток системы - функциональная ограниченность, которая заключается только в обеспечении персональной связи без решения задач видеовещания, интерактивных услуг, включая доступ в Интернет и широкополосных приложений (ВИИШП) [6].
Целевая задача ССПС Iridium - обеспечение глобальной персональной связи. Недостаток системы - функциональная ограниченность, которая заключается только в обеспечении персональной связи без решения задач ВИИШП [6].
Известна спутниковая система цифрового телевидения DVB-S2. К недостатку системы DVB-S2 можно отнести ограниченность функционального назначения и ограниченность пространственного обеспечения, обусловленная геостационарными орбитами спутниковых транспондеров [7].
Известна спутниковая радиолокационная система с синтезированной апертурой (РСА) LightSAR, решающая целевые задачи наблюдения земной и морской поверхности, наземных и надводных объектов, мониторинга хозяйственной деятельности и природный явлений, формирования карт местности (в том числе, 3-х мерных) [8]. Система LightSAR использует L- и Х- рабочие частотные диапазоны. Для Х-частотного диапазона используется активная фазированная решетка (АФАР), около 1000 приемо-передающих модулей по 8 Вт (размер антенны 1.35×2.9 м, импульсная мощность 8 кВт, длительность импульса 15 мкс, ширина частотной полосы 300 МГц, частота повторения импульсов 15 кГц, ширина облучаемого участка 10 км, разрешающая способность 1×1 м, скорость передачи данных 1200 Мбит/с). Для варианта PCA-L используется АФАР с возможностью работы в нескольких режимах (режим прожектора, сканирования лучом) с характеристиками: размер антенны 10.8×2.9 м, импульсная мощность 8 кВт, длительность импульса 15 мкс, ширина полосы 80 МГц, частота повторения импульсов 1.6 кГц, ширина облучаемого участка 20 км, разрешающая способность 3×3 м, скорость передачи данных 150 Мбит/с.
Известна схема системы РЛС с РСА, которая содержит бортовой радиолокационный комплекс (спутниковый сегмент) и наземный комплекс приема и обработки информации (наземный сегмент) [9]. Бортовой радиолокационный комплекс содержит блок формирования сигналов (БФС), синхронизатор, передатчик, переключатель прием/передача, антенну РСА, приемник с выходами на фазовые детекторы квадратурных каналов, аналого-цифровые преобразователи (АЦП) квадратурных каналов, блок сопряжения с радиолинией передачи данных, процессор управления и контроля, навигационное оборудование, командную радиолинию (КРЛ), радиолинию передачи данных (РПД). Наземный комплекс содержит командную радиолинию, приемник РПД, архив информационных продуктов, блок синтеза комплексного радиолокационного изображения, блок детектирования КРЛИ с получением амплитудного или энергетического изображения и некогерентного накопления амплитудных или энергетических изображений, блок нормализации, блок радиометрической и геометрической коррекций, блок привязки к географическим координатам, блок тематической обработки и интерпретации радиолокационной информации.
Эта система имеет следующие недостатки.
1. Низкая помехоустойчивость как по отношению к активным, так и по отношению к пассивным помехам (уголковым отражателям).
2. Низкая оперативность (в большинстве случаев невозможность) получения набора разноракурсных РЛИ наблюдаемых объектов.
3. Ограниченность пространственного обеспечения (локальность наблюдения земной поверхности), обусловленная узкой полосой обзора.
4. Ограниченность функционального назначения: целевая решаемая задача - получение радиолокационных изображений земной поверхности.
Наиболее близким по своей сущности к заявляемому изобретению является "Способ получения радиолокационного изображения земной поверхности при помощи многопозиционной системы с синтезированной апертурой антенны" [2].
Схема устройства, реализующего этот способ получения РЛИ, содержит навигационные КА (НКА) спутниковой радионавигационной системы ГЛОНАСС/GPS (N НКА), облучаемый сигналами S1, … ,SN участок земной поверхности, борт носителя приемной позиции, которой содержит приемник сигналов прямого распространения, подключенный к слабонаправленной антенне для приема сигналов прямого распространения (опорных сигналов) S1ПР…SNПР, а выход которого соединен с входом устройства для фазирования сигналов прямого распространения (опорных сигналов) S1ПР…SNПР и отраженных сигналов S1OTP…SNOTP, выделения эфемеридной информации о видимых навигационных КА, синхронизации шкалы времени и контроля состояния ионосферы, выход устройства для фазирования сигналов соединен с входом устройства вычисления взаимной корреляции между сигналами прямого распространения S1ПР…SNПР и отраженными сигналами S1OTP…SNOTP и формирования N радиолокационных голограмм, еще один вход устройства вычисления взаимной корреляции соединен с выходом приемника отраженных сигналов, подключенный к антенне для приема отраженных сигналов S1отр, …, SNотр, а выход устройства вычисления взаимной корреляции подключен к входу устройства синтезирования N радиолокационных разноракурсных изображений [2].
Недостатками данного устройства являются: техническая сложность согласованного управления узкими диаграммами направленности антенн КА приемных позиций при их наведении на заданный участок земной поверхности, ограниченность наблюдения земной поверхности, отсутствие средств для наблюдения подвижных объектов земной поверхности и околоземного пространства.
Целью изобретения является обеспечение глобального непрерывного трехмерного радиолокационного наблюдения земной поверхности и околоземного пространства с возможностями анализа событий в прошлом, селекции подвижных объектов и оценки параметров их движения в реальном времени, расширение функциональных возможностей и обеспечение эффективности реализации способа путем одновременного решения задач глобальной спутниковой системы персональной связи, видеовещания, интерактивных услуг, включая доступ в Интернет и широкополосных приложений, и глобальной транспортной инфотелекоммуникационной IP сети.
Поставленная цель достигается тем, что в способе глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства облучают земную поверхность и околоземное пространство зондирующими сигналами спутникового сегмента, осуществляют прием отраженных зондирующих сигналов, выделяют зондирующие сигналы, отраженные зондирующие сигналы, эфемеридную информацию и информацию о бортовом времени космических аппаратов, выполняют взаимно-корреляционную обработку отраженных сигналов и зондирующих сигналов, формируют независимые разноракурсные радиолокационные изображения наблюдаемого участка земной поверхности и околоземного пространства, где, в отличие от прототипа, зондирующие сигналы представляют собой синхронизированную по сигналам спутниковых радионавигационных систем циклы пакетов сигналов персональной связи видеовещания, интерактивных услуг, включая доступ в Интернет и широкополосных приложений, прием отраженных сигналов осуществляют с трех и более разнесенных в пространстве направлений приемными элементами с широкой диаграммой направленности, которые формируют циклы пакетов принятых отраженных зондирующих сигналов, синхронизированных по сигналам спутниковых радионавигационных систем, а на наземном сегменте осуществляют прием, форматирование и хранение сигнально-информационных потоков, из которых выделяют зондирующие сигналы, принятые отраженные зондирующие сигналы, эфемеридную информацию и информацию о бортовом времени спутникового сегмента, формируют отраженные сигналы с узкой диаграммой направленности с использованием технологии фазирования сигналов для каждого направления приема отраженных сигналов, которые направлены в общую зону радиолокационного наблюдения, формируют независимые разноракурсные радиолокационные изображения наблюдаемого участка земной поверхности и околоземного пространства путем взаимно-корреляционной обработки сформированных отраженных сигналов с узкой диаграммой направленности и зондирующих сигналов, выполняют привязку сформированных радиолокационных изображений к карте, осуществляют некогерентное накопление радиолокационных изображений, осуществляют тематическую обработку радиолокационных изображений, выделяют подвижные объекты и оценивают их кинематические характеристики.
Хранение сигналов на наземном сегменте, передаваемых по РПД, происходит путем архивирования с целью их последующего воспроизведения, получения радиолокационных изображений и маршрутов движения подвижных объектов для анализа ситуационных событий произошедших в прошлом.
Поставленная цель достигается так же тем, что устройство, реализующее способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства, содержащее спутниковый сегмент среднеорбитальных КА передающих позиций ГЛОНАСС, борт приемной позиции в составе антенны приемника отраженных сигналов, устройства для фазирования отраженных сигналов, выделения эфемеридной информации и бортового времени, устройства синтезирования разноракурсных радиолокационных изображений, где, в отличие от прототипа, введен наземный сегмент, а спутниковый сегмент содержит орбитальную группировку взаимосвязанных межспутниковыми линиями связи низкоорбитальных КА-ретрансляторов двух типов чередующих друг друга во всех орбитальных плоскостях, каждый из которых работает в двух не пересекающихся диапазонах рабочих частот на передачу и прием для спутниковой системы персональной связи, видеовещания, интерактивных услуг, включая доступ в Интернет и широкополосных приложений, каждый КА в содержит передающую многолучевую антенну (МЛА) зондирующих сигналов, соединенную с блоком передающего устройства зондирующих сигналов, информационный вход блока передающего устройства соединен с выходом блока формирования циклов IP пакетов зондирующих сигналов, управляющий вход блока формирования циклов IP пакетов принятых отраженных зондирующих сигналов, управляющий вход блока формирования циклов IP пакетов зондирующих сигналов и управляющий вход блоков передающего устройства соединены, соответственно, с первым вторым и третьим выходом блока управления и программирования режимов функционирования бортового специального комплекса (БСК) КА, информационные вход и выход которого соединены с портами вывода и ввода сигнально-информационных потоков управления, программирования и телеметрического контроля бортового маршрутизатора IP пакетов, информационные вход/выход блока формирования циклов IP пакетов зондирующих сигналов подключены соответственно к порту вывода IP пакетов сигнально-информационных потоков нисходящих линий ССПС и ВИИШП и к порту ввода IP пакетов излученных зондирующих сигналов бортового маршрутизатора, синхронизирующие входы блока формирования циклов IP пакетов зондирующих сигналов, блока формирования циклов IP пакетов принятых отраженных зондирующих сигналов, генератора псевдослучайных последовательностей с К выходами и блока приема, декодирования и контроля частотных каналов на восходящих линиях ССПС подключены к выходу синхронизатора блока спутниковой радионавигации, вход которого подключен к антенне спутниковой системы радионавигации, а информационный выход блока подключен к порту бортового маршрутизатора вывода IP пакетов эфемеридной информации и информации о бортовом времени космического аппарата, к соответствующему порту ввода IP пакетов сигнально-информационных потоков бортового маршрутизатора подключен выход блока формирования циклов IP пакетов принятых отраженных зондирующих сигналов, информационный вход которого подключен к выходу блока компрессии данных аналого-цифрового преобразования принятых отраженных сигналов, вход которого подключен к выходу сумматора сигналов с К входами, соединенного с группой выходов блока из К умножителей, первая группа К входов которого подключена к группе К выходов блоков приемных устройств отраженных зондирующих сигналов, а вторая группа К входов блока из К умножителей подключена к группе К выходов генератора псевдослучайных последовательностей, группа К входов блоков приемных устройств отраженных зондирующих сигналов подключена к выходам К активных элементов приемной антенной решетки, соответствующие порты входа/выхода бортового маршрутизатора подключены к соответствующим выходам/входам четырехканального блока межспутниковых линий связи (МЛС) и к выходам/входам n-канального приемо-передающего блока радиолиний связи с наземными приемными пунктами, выходы/входы которого подключены к приемо-передающим входам/выходам антенн на радиолиниях связи с наземными пунктами, входы/выходы блока МЛС подключены к четырем приемо-передающим антеннам межспутниковых линий связи, два соответствующих порта бортового маршрутизатора подключены к входным/выходным портам блока управления функционированием ССПС, вход которого подключен к блоку приема, декодирования и контроля частотных каналов на восходящий линиях ССПС, антенный вход блока соединен с соответствующим выходом блока формирования и управления ДН антенной решетки (АР) спутниковой связи, два других соответствующих порта бортового маршрутизатора подключены к входным/выходным портам блока управления функционированием системы ВИИШП, вход которого подключен к выходу блока приема, декодирования и контроля частотных каналов на восходящий линиях системы ВИИШП, антенный вход которого подключен к соответствующему выходу блока формирования и управления ДН АР на восходящих радиолиниях системы ВИИШП, управляющий выход блока управления функционированием системы спутниковой персональной связи и управляющий выход блока управления функционированием системы ВИИШП подключены к соответствующим управляющим входам блока формирования и управления ДН АР спутниковой связи на вход которого поступают развязанные выходы К антенных элементов с блока приемных устройств отраженных зондирующих сигналов.
Наземный приемный пункт (НЛП) в составе наземного сегмента, содержит комплекс средств ССПС, ВИИШП и инфотелекоммуникационных транспортных сетей (ИТТС), который входами/выходами подключен к комплексу приемно-передающих станций форматирования, архивирования и хранения сигнально-информационных потоков, который подключен к входу блока выбора массивов текущей обработки, первый выход блока выбора массива принятых отраженных сигналов подключен к входу блока декомпрессии, его выход подключен к группе входов блока К умножителей, вторые К входы которого подключены к генератору псевдослучайных последовательностей с К выходами, а группа К выходов блока подключена к группе входов блока формирования отраженных сигналов с узкой ДН, выход которого подключен к блоку формирования разноракурсных РЛИ, второй вход которого соединен с выходом блока выбора массива зондирующих сигналов КА, а третий вход этого блока соединен с выходом блока формирования и архивации массива контрольно-юстировочных сигналов, вход которого соединен с блоком спутниковой радионавигации, формирования опорных частот и сигналов синхронизации, а второй выход подключен к передающему комплексу контрольно-юстировочных станций (КЮС), третий выход блока выбора массива данных о бортовом времени КА соединен с входом синхронизации генератора псевдослучайных последовательностей, первым входом блока задания пространственных координат и первым входом блока привязки к карте, четвертый выход блока выбора массива данных эфемеридной информации соединен со вторыми входами блока задания пространственных координат и блока привязке к карте, первый выход блока задания пространственных координат соединен с информационным входом блока формирования отраженных сигналов с узкой ДН, второй выход блока задания пространственных координат соединен с третьим информационным входом блока привязки к карте, первый выход блока формирования разноракурсных РЛИ соединен с входом блока некогерентных накоплений РЛИ, выход которого подключен к четвертому входу блока привязки к карте, информационный выход которого подключен к входу блока тематической обработки РЛИ, информационный выход данных калибровки блока формирования разноракурсных РЛИ соединен с входом блока формирования отраженных сигналов с узкой ДН и с входом данных калибровки комплекса управления функционированием ИИСС в составе НПП, порты входа/выхода блока комплекса управления функционированием ИИСС в составе НПП соединены с комплексом средств ССПС, ВИИШП и ИТТС, а управляющий выход комплекса управления функционированием ИИСС в составе НПП соединен с управляющими входами комплекса приемно-передающих станций форматирования, архивирования и хранения сигнально-информационных потоков, блока выбора массивов текущей обработки, блока формирования и архивации массива контрольно-юстировочных сигналов, блока задания пространственных координат, блока привязки к карте и блока тематической обработки РЛИ.
Предлагаемый способ и реализующее его устройство обеспечивает получение следующих преимуществ.
1. Реализация спутникового сегмента ИИСС с необходимым количеством КА и их орбитальных плоскостей и НПП решают комплекс задач на единой основе:
- глобального непрерывного радиолокационного наблюдения земной поверхности и околоземного пространства в режиме реального времени и в режиме воспроизведения путем получения разноракурсных радиолокационных изображений и обнаружения статистических и подвижных объектов для анализа ситуационных событий в прошлом;
- организации глобальной ССПС;
- организации глобальной системы ВИИШП;
- создания глобальной спутниковой инфотелекоммуникационной транспортной сети, резервирующей и дополняющей территориальные ИТТС.
2. Решается проблема прототипа по согласованному управлению узкими ДН приемных антенн при наведении их на заданный участок земной поверхности, которая осуществляется в одном блоке на одном НПП, что значительно упрощает решение задачи формирования множества разноракурсных РЛИ задаваемой области земной поверхности и околоземного пространства на основе технологии фазирования сигналов и технологии синтеза антенной апертуры с задаваемыми режимами зондирования (маршрутный режим, прожекторный режим).
3. Обеспечивается требуемый энергетический потенциал для решения заявленных задач глобальной активно-пассивной радиолокации, ССПС и системы ВИИШП, так же обеспечивается значительное расширение одновременно наблюдаемых областей земной поверхности и околоземного пространства. Изменение размера зоны радиолокации осуществляются заданием режимов функционирования передающих МЛА (режим «ДН с обужением», режим «широкая ДН») без изменений режима приема и формирования отраженных сигналов и без ограничения выполнения целевых задач глобальной ССПС и системы ВИИШП.
Устройство, реализующее предложенный способ, обеспечивает решение проблем глобальной многопозиционной трехмерной радиолокации земной поверхности и околоземного пространства для обнаружения и сопровождения статических и подвижных объектов как в режиме реального времени, так и в режиме воспроизведения для восстановления и анализа произошедших ситуационных событий в прошлом. Так же решаются задачи глобальной ССПС и системы ВИИШП с характеристиками, эквивалентными или превышающими характеристики известных спутниковых систем аналогичного назначения за счет высокой мощности излучения сигналов, требуемой для радиолокационного зондирования, и более широкой доступной полосы в рабочих диапазонах частот, по сравнению с ограниченным и полностью распределенным частотно-орбитальным ресурсом, выделенным международным регламентом для ССПС и системы ВИИШП.
Проведенный анализ уровня техники позволяет установить, что технические решения, характеризующиеся совокупностью признаков, идентичных всем признакам, содержащимся в предложенной заявителем формуле изобретения, отсутствуют, что указывает на соответствие заявленного изобретения критерию охраноспособности «новизна».
Результаты поиска известных решений в данной и смежной областях техники, с целью выявления признаков, совпадающих с отличительными признаками заявляемого устройства, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками. Из уровня техники также не подтверждена известность влияния отличительных признаков заявляемого изобретения на указанный заявителем технический результат. Следовательно, заявленное изобретение соответствует условию «изобретательский уровень».
Реализация способа рассмотрена для i спутникового сегмента, состоящего из четырех КА-ретрансляторов одного типа (нечетных КА №1i, №3i, №5i, №7i), передающих сигналы в диапазоне рабочих частот ƒ0, и принимающих отраженные сигналы в диапазоне рабочих частот ƒ1, и четырех КА - ретрансляторов другого типа (четных КА №2i, №4i, №6i, №8i), следующих во всех орбитальных плоскостях за нечетными и отличающихся частотными планами - передающие сигналы в диапазоне рабочих частот ƒ1 и принимаемые отраженные сигналы в диапазоне рабочих частот ƒ0.
На фиг. 1 приведено взаимное расположение восьми смежных КА кластера i с соответствующими антенными системами, находящихся на четырех смежных орбитальных плоскостях и наземный сегмент устройства,
на фиг. 2 приведена блок-схема устройства бортового специального комплекса спутникового сегмента глобальной активно-пассивной многопозиционной спутниковой радиолокации двух типов КА-ретрансляторов,
на фиг. 3 приведена блок-схема устройства НПП в составе наземного сегмента глобальной активно-пассивной многопозиционной спутниковой радиолокации,
на фиг. 4 приведена блок-схема устройства комплекса средств ССПС, системы ВИИШП и ИТТС в составе НПП,
на фиг. 5 приведена схема частотного распределения рабочих диапазонов ƒ0 и ƒ1 зондирующих сигналов и приема отраженных зондирующих сигналов для БСК в i-ом кластере КА спутникового сегмента,
на фиг. 6 приведена геометрическая схема прохождения зондирующих и отраженных сигналов, поясняющая активно-пассивный способ радиолокации с пяти приемно-передающих позиций космических аппаратов КА в составе i-го кластера.
На фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6 и в тексте приняты следующие обозначения:
1 - спутниковый сегмент, кластер i, КА №1i,
2 - спутниковый сегмент, кластер i, КА №2i,
3 - спутниковый сегмент, кластер i, КА №3i,
4 - спутниковый сегмент, кластер i, КА №4i,
5 - спутниковый сегмент, кластер i, КА №5i,
6 - спутниковый сегмент, кластер i, КА №6i,
7 - спутниковый сегмент, кластер i, КА №7i,
8 - спутниковый сегмент, кластер i, КА №8i,
9 - кластер спутникового сегмента (кластер i содержит КА №1i, №2i, №3i, №4i, №5i, №6i, №7i, №8i),
10 - наземный сегмент,
11 - антенны приема/передачи МЛС,
12 - антенны приема/передачи радиолиний КА на НПП,
13 - антенна приема сигналов спутниковых радионавигационных систем (ГЛОНАСС/GPS и пр.),
14 - приемная АР с K активными элементами (АЭ) в диапазоне рабочих частот ƒ1,
15 - передающая МЛА зондирующих сигналов в диапазоне рабочих частот ƒ0,
16 - приемная АР с K АЭ в диапазоне рабочих частот ƒ0,
17 - передающая МЛА зондирующих сигналов в диапазоне рабочих частот ƒ1,
18 - блок формирования и управления ДН АР спутниковой связи,
19 - блок передающего устройства зондирующего сигнала в диапазоне рабочих частот ƒ1,
20 - блок передающего устройства зондирующего сигнала в диапазоне рабочих частот ƒ0.
21 - блок К-канальных приемных устройств отраженных зондирующих сигналов АЭ в диапазоне рабочих частот ƒ0,
22 - блок К-канальных приемных устройств АЭ отраженных зондирующих сигналов в диапазоне рабочих частот ƒ1,
КА в кластере и наземный сегмент содержат идентичные по назначению блоки:
23 - блок К умножителей,
24 - генератор псевдослучайных последовательностей с К выходами.
КА в кластере содержат идентичные по назначению блоки:
25 - сумматор сигналов с К входами,
26 - блок формирования циклов из IP пакетов, принятых отраженных зондирующих сигналов,
27 - блок спутниковой радионавигации,
28 - блок компрессии данных аналого-цифрового преобразования принятых отраженных сигналов,
29 - блок формирования циклов IP пакетов зондирующих сигналов,
30 - четырех-канальный блок приема-передачи МЛС,
31 - n-канальный приемо-передающий блок радиолиний связи КА с НПП,
32 - блок приема, декодирования и контроля частотных каналов на восходящих линиях ССПС,
33 - блок управления функционированием ССПС на борту КА,
34 - бортовой маршрутизатор IP пакетов,
35 - блок приема, декодирования и контроля частотных каналов на восходящих линиях системы ВИИШП,
36 - блок управления функционированием ВИИШП на борту КА,
37 - блок управления и программирования режимов функционирования БСК КА,
38 - антенный выход блока формирования и управления ДН АР для ССПС,
39 - антенный выход блока формирования и управления ДН АР для ВИИШП,
40 - управляющий вход блока формирования и управления ДН АР для ССПС,
41 - управляющий вход блока формирования и управления ДН АР для ВИИШП,
42 - группа сигнальных входов блока формирования и управления ДН АР спутниковой связи,
43 - первый выход блока управления и программирования режимов функционирования БСК КА,
44 - второй выход блока управления и программирования режимов функционирования БСК КА,
45 - третий выход блока управления и программирования режимов функционирования БСК КА.
Наземный сегмент содержит взаимосвязанную территориально-разнесенную сеть наземных пунктов приема, которые содержат:
46 - комплекс приемно-передающих станций форматирования, архивирования и хранения сигнально-информационных потоков (на нисходящих РПД, обеспечивающих решение задач радиолокации, прием и передачу IP пакетов ССПС, ВИИШП, ИТТС и команд управления и программирования режимами функционирования БСК),
47 - блок выбора массивов зондирующих сигналов, отраженных зондирующих сигналов, эфемеридной информации, бортового времени КА для текущей обработки,
48 - блок декомпрессии,
49 - выход блока выбора массива отраженных сигналов,
50 - выход блока выбора массива данных эфемеридной информации,
51 - выход блока выбора массива данных о бортовом времени КА,
52 - выход блока выбора массива зондирующих сигналов КА,
53 - блок формирования отраженных сигналов с узкой ДН,
54 - блок взаимной корреляционной обработки зондирующих и отраженных зондирующих сигналов, и формирования разноракурсных РЛИ,
55 - блок некогерентных накоплений РЛИ,
56 - блок привязки к карте,
57 - блок задания пространственных координат,
58 - блок тематической обработки РЛИ,
59 - управляющий сигнальный выход комплекса управления функционированием ИИСС в составе НПП,
60 - комплекс управления функционированием ИИСС в составе НПП,
61 - блок спутниковой радионавигации, формирования опорных частот и сигналов синхронизации,
62 - передающий комплекс КЮС,
63 - блок формирования и архивации массива контрольно-юстировочных сигналов,
64 - информационный выход данных калибровки блока взаимной корреляционной обработки зондирующих и отраженных зондирующих сигналов, и формирования разноракурсных РЛИ,
65 - комплекс средств ССПС, ВИИШП и ИТТС,
66 - комплекс управления и контроля ССПС,
67 - комплекс абонентских станций и терминального оборудования, функционирующего в ССПС,
68 - комплекс управления и контроля системы ВИИШП,
69 - комплекс абонентских станций и терминального оборудования системы ВИИШП,
70 - узловой маршрутизатор IP пакетов сигнально-информационных потоков на НПП,
71 - шлюзовая станция доступа в территориальные ИТТС,
72 - блок сетевых интерфейсов и протоколов,
73 - первый порт вход/выход IP потоков ИТТС узлового маршрутизатора сигнально-информационных потоков на НПП,
74 - второй порт вход/выход IP потоков ССПС узлового маршрутизатора сигнально-информационных потоков на НПП,
75 - третий порт вход/выход IP потоков ВИИШП узлового маршрутизатора сигнально-информационных потоков на НПП,
76 - первый порт вход/выход IP потоков ИТТС шлюзовой станции доступа в территориальные ИТТС,
77 - второй порт вход/выход IP потоков ССПС шлюзовой станции доступа в территориальные ИТТС,
78 - третий порт вход/выход IP потоков ВИИШП шлюзовой станции доступа в территориальные ИТТС,
79 - линии связи шлюзовой станции доступа в территориальные ИТТС.
Пример реализации способа: в кластере i передающие позиции КА №1i блок 1, №3i блок 3, №5i блок 5, №7i блок 7 спутникового сегмента 9 для глобальной МПР выполняют передачу серии циклов зондирующих сигналов блоком 20 передающего устройства зондирующего сигнала в диапазоне рабочих частот ƒ0, выделенных на первичной основе для космических средств радиолокации [9], которые формируют из IP пакетов ССПС и системы ВИИШП, используемых на нисходящих линиях спутниковой связи в адрес абонентского терминального оборудования. В этом же кластере i передающие позиции КА №2i блок 2, №4i блок 4, №6i блок 6, №8i блок 8 для глобальной МПР выполняют передачу серии циклов зондирующих сигналов блоком 19 передающего устройства зондирующего сигнала в диапазоне рабочих частот ƒ1, выделенных на первичной основе для космических средств радиолокации, которые так же формируют из IP пакетов ССПС и системы ВИИШП для обеспечения функционирования ССПС и ВИИШП на нисходящих линиях спутниковой связи в диапазоне рабочих частот ƒ1 (ƒ1≠ƒ0, например L и X диапазоны).
КА №1i 1, №3i 3, №5i 5, №7i 7 в составе кластера i в диапазоне рабочих частот ƒ1 выполняют прием отраженных зондирующих сигналов, излученных группировкой КА №2i 2, №4i 4, №6i 6, №8i и ретрансляцию принятых сигналов на НПП 10. Прием ведется К АЭ 14 с широкой диаграммой направленности с использованием блока приемных устройств отраженных зондирующих сигналов АЭ в диапазоне рабочих частот ƒ1 22. В свою очередь КА №2i 2, №4i 4, №6i 6, №8i 8 выполняют прием отраженных зондирующих сигналов в диапазоне рабочих частот ƒ0, излученных группировкой КА №1i 1, №3i 3, №5i 5, №7i 7, и ретрансляцию принятых отраженных зондирующих сигналов на НПП 10. Прием ведется К АЭ 16 с широкой диаграммой направленности с использованием блока приемных устройств отраженных зондирующих сигналов АЭ в диапазоне рабочих частот ƒ0 21. Результирующий сигнал, передаваемый на наземный сегмент 10, формируется в блоке 26 формирования циклов из IP пакетов, принятых отраженных зондирующих сигналов с кодовым уплотнением, которое осуществляется действием блока 23 К умножителей, генератора 24 псевдослучайных последовательностей с К выходами и сумматора 25 сигналов с К входами, выход которого подключен через блок 28 компрессии данных аналого-цифрового преобразования принятых отраженных сигналов к входу блока 26 формирования циклов из IP пакетов.
Выполнение задач ССПС и ВИИШП на спутниковом сегменте осуществляется соответственно действием блока 32 приема, декодирования и контроля частотных каналов на восходящих линиях ССПС и действием блока 35 приема, декодирования и контроля частотных каналов на восходящий линиях системы ВИИШП, на антенные входы которых поступают сигналы с выхода блока 18 формирования и управления ДН АР спутниковой связи.
На фиг. 1 представлено взаимное расположение восьми смежных КА кластера i с соответствующими антенными системами, находящихся на четырех смежных орбитальных плоскостях j-1, j, j+1 и j+2.
Начало излучения циклов зондирующих сигналов, так же как и время приема циклов отраженных зондирующих сигналов, точно привязано к системе единого времени по сигналам спутниковой радионавигации 27. Формат, структура и длительность построения циклов зондирующих сигналов и принятых отраженных сигналов задается наземным комплексом 60 управления функционированием ИИСС в составе НПП и априори известны на всех НПП, поэтому положение каждого бита информации во всех циклах точно определено на шкале времени.
Количество кластеров 9 - N орбитальной группировки спутникового сегмента определяют условием глобального покрытия поверхности Земли суммарными диаграммами направленности передающих антенн 15, 17 зондирующих сигналов и антенн 14, 16 приема отраженных зондирующих сигналов с трех и более разнесенных направлений.
На НПП наземного сегмента 10 осуществляют прием, форматирование и хранение сигнально-информационных потоков, передаваемых через РПД 31 с антенной 12 приема/передачи радиолиний КА на НПП. Если в зоне радиолокационного наблюдения нет НПП (например, зона Антарктиды), то сигнально-информационные потоки из таких зон транслируются по МЛС 30 с антенной 11 приема/передачи МЛС до ближайших НПП с радиолиниями 31.
При обработке на НПП требуемые сигнально-информационные массивы данных для заданных периода времени и зоны радиолокационного наблюдения поступают из архива в блок выбора массивов зондирующих сигналов, отраженных зондирующих сигналов, эфемеридной информации, бортового времени КА для текущей обработки 47. Соответствующие массивы отраженных зондирующих сигналов от трех и более смежных КА-ретрансляторов, поступающих с блока 47 подаются на блок декомпрессии 48, который восстанавливает сжатые отсчеты аналого-цифрового преобразования суммарного отраженного сигнала с кодовым уплотнением. Группа К умножителей суммарного отраженного сигнала с К сигналами генератора псевдослучайных последовательностей 24, синхронизированного по времени с аналогичным бортовым генератором, позволяет получить К отраженных сигналов, принятых на данном отрезке времени К АЭ приемных АР каждым из трех и более смежных КА спутникового сегмента. В блоке 53 формируют три и более отраженных сигналов, принятых виртуальной антенной системой с узкими ДН, направленными в общую точку зоны радиолокационного наблюдения. Эти принятые отраженные сигналы с узкой ДН в результате взаимно-корреляционной обработки в блоке 54 с соответствующими массивами зондирующих сигналов, излученными зондирующими (передающими КА-ретрансляторами) и поступающими с выхода 52 блока 47, обеспечивают получение разноракурсных радиолокационных изображений в области общей зоны наблюдения определяемой тремя и более пересекающимися узкими ДН.
Вычисленные сигналы с узкой ДН направлены на основе технологии синтеза антенной апертуры в общую точку зоны наблюдения с трех и более разнесенных в пространстве направлений.
В блоке 54 на основе технологии MIMO-РЛС выполняют формирование множества РЛИ для области земной поверхности и околоземного пространства, определяемой блоком 57 задания пространственных координат. Для каждой точки РЛИ в данной зоне по разности доплеровского сдвига частоты максимумов взаимно-корреляционных функций, вычисленных в блоке 54, ведется последующая селекция подвижных объектов и определение их кинематических характеристик в реальном масштабе времени в блоке тематической обработки 58. Для корректной работы блоков 53, 54 и 58 используются соответствующие эфемеридные данные и данные о бортовом времени, формируемые из соответствующих массивов 50, 51, в блоках задания пространственных координат 57 и привязке к карте 56, функционирующих под общими управлением 59 с комплекса 60 управления функционированием ИИСС в составе НПП.
Используя задаваемые режимы зондирования при обработке (маршрутный режим, прожекторный режим), осуществляют некогерентное накопление РЛИ в блоке 55 для повышения энергетического бюджета и обеспечения вероятностных характеристик обнаружения и сопровождения объектов радиолокации. На основе вычисления разности доплеровского сдвига отраженных зондирующих сигналов в блоке 54, принятых с трех и более направлений приема в данное время и в данной точке околоземного пространства, оценивают кинематические параметры движения подвижных объектов, а также осуществляют тематический анализ с использованием блока 56 привязки к карте и блока 58 тематической обработки РЛИ как в режиме реального времени, так и в режиме последующего воспроизведения архивированных сигнально-информационных потоков для анализа ситуаций, произошедших в прошлом, задаваемых комплексом 60 управления функционированием ИИСС в составе НПП.
Для контроля амплитудно-фазовых характеристик бортовых трактов приема отраженных зондирующих сигналов и юстировки исходных параметров, используемых при формировании узких ДН приема с задаваемых направлений, на НПП формируют контрольно-юстировочные сигналы, время формирования и архивации которых привязано к общей шкале времени в блоке 63 формирования и архивации массива контрольно-юстировочных сигналов НПП, синхронизированных по сигналам спутниковой радионавигации блока 61. Контрольно-юстировочные сигналы излучаются с НПП в направлении видимых КА спутникового сегмента в соответствующих им диапазонах рабочих частот (например, в L- или Х- диапазоне) через комплекс 62 КЮС НПП, используя отличающиеся сигнально-кодовые конструкции по отношению к формируемым на борту зондирующим сигналам. В блоке 54 взаимной корреляционной обработки зондирующих и отраженных зондирующих сигналов и формирования разноракурсных РЛИ реализуется дополнительный тракт взаимно-корреляционной обработки ретранслированных отраженных зондирующих сигналов с опорной копией излученного контрольно-юстировочного сигнала, результаты данной обработки поступают в блок 53 формирования отраженных сигналов с узкой ДН и на IP вход данных калибровки комплекса 60 управления функционированием ИИСС в составе НПП, который связан IP портами с комплексом средств ССПС, ВИИШП и территориальной ИТТС и в результате последующего информационного обмена используются для коррекции амплитудных и фазовых параметров тракта передачи/приема при формировании узких ДН для трех и более разнесенных в пространстве направлений приема отраженных зондирующих сигналов спутниковым сегментом на всех НПП, и при формировании ДН приемных бортовых антенн ССПС и ВИИШП всех КА-ретрансляторов спутникового сегмента.
Глобальную ССПС осуществляют путем использования группировок КА-ретрансляторов спутникового сегмента и наземного сегмента 10 на основе соответствующих протоколов организации доступа абонентских станций 67 к частотно-временным ресурсам и комплекса 66 управления и контроля ССПС, например, на основе протоколов, рассмотренных выше в качестве аналогов глобальной ССПС Iridium или GlobalStar.
Глобальную спутниковую систему ВИИШП осуществляют путем использования группировок КА-ретрансляторов спутникового сегмента и наземного сегмента 10 на основе соответствующих протоколов организации доступа абонентского терминального оборудования 69 к частотно-временным ресурсам и комплекса 68 управления и контроля системы ВИИШП (с использованием TCP/IP протоколов доступа к информационным ресурсам Интернет сетей и протоколов цифрового видеовещания, например, на основе протокола рассмотренной выше в качестве аналога системы цифрового телевидения DVB-S2).
Функционирование спутниковой ИТТС обеспечивается путем трансляции IP пакетов информации между любыми шлюзовыми станциями территориальных ИТТС 71 через блок 72 сетевых интерфейсов и протоколов и через узловые маршрутизаторы 70 IP пакетов сигнально-информационных данных на НПП, радиолинии связи НПП с КА текущего кластера 46, 31, бортовые маршрутизаторы 34 и МЛС 30.
Управление КА спутникового сегмента и задание режимов функционирования (режим «широкой ДН», режим «ДН с обужением») выполняют с разнесенных комплексов 60 управления ИИСС в составе НПП наземного сегмента и блоком 37 управления и функционирования бортового специального комплекса КА спутникового сегмента по аналогичному тракту взаимодействия: блок 60, узловой маршрутизатор IP пакетов 70, радиолинии между комплексом 46 приемопередающих станций НПП и КА 31, бортовые маршрутизаторы 34, блок 37. Аналогично по такому тракту обеспечивается управление функционированием ССПС и ВИИШП во взаимодействии с бортовыми и наземными блоками управления функционированием ССПС 33, 66 и ВИИШП 36, 68 в составе комплекса 65 средств ССПС и ВИИШП и ИТТС.
Пример выполнения устройства глобальной активно-пассивной многопозиционной спутниковой радиолокации, содержащего наземный сегмент 10 и N кластеров спутникового сегмента 9 из взаимосвязанных межспутниковыми линиями связи низкоорбитальных космических аппаратов-ретрансляторов двух типов чередующих друг друга во всех орбитальных плоскостях, каждый из которых работает в двух не пересекающихся диапазонах рабочих частот на передачу и прием для спутниковой системы персональной связи, видеовещания, интерактивных услуг, включая доступ в Интернет и широкополосных приложений, реализуется в интегрированной информационной спутниковой системе (ИИСС), обеспечивающей одновременное функционирование ССПС, ВИИШП и спутниковой ИТТС.
Спутниковый сегмент содержит орбитальную группировку КА с организацией N пересекающихся кластеров из восьми КА №1, №2, №3, №4, №5, №6, №7, №8, каждый КА в кластере содержит передающую МЛА 15, 17 зондирующих сигналов, соединенную с блоком 19, 20 передающего устройства зондирующих сигналов, информационный вход блока 20, 19 передающего устройства соединен с выходом блока 29 формирования циклов IP пакетов зондирующих сигналов, управляющий вход блока 26 формирования циклов IP пакетов принятых отраженных зондирующих сигналов, управляющий вход блока 29 формирования циклов IP пакетов зондирующих сигналов и управляющий вход блоков 19, 20 передающего устройства соединены соответственно с первым 43, вторым 44 и третьим 45 выходом блока 37 управления и программирования режимов функционирования БСК КА, информационные вход/выход которого соединены с портами вывода/ввода сигнально-информационных потоков управления, программирования и телеметрического контроля бортового маршрутизатора IP пакетов 34, информационные вход/выход блока 29 формирования циклов IP пакетов зондирующих сигналов подключены соответственно к порту вывода IP пакетов сигнально-информационных потоков нисходящих линий ССПС и ВИИШП и к порту ввода IP пакетов излученных зондирующих сигналов бортового маршрутизатора 34, синхронизирующие входы блока 29 формирования циклов IP пакетов зондирующих сигналов, блока 26 формирования циклов IP пакетов принятых отраженных зондирующих сигналов, генератора 24 псевдослучайных последовательностей с К выходами и блока 32 приема, декодирования и контроля частотных каналов на восходящих линиях ССПС подключены к выходу синхронизатора блока 27 спутниковой радионавигации, вход которого подключен к антенне 13 спутниковой системы радионавигации, а информационный выход блока 27 подключен к порту бортового маршрутизатора 34 вывода IP пакетов эфемеридной информации и информации о бортовом времени космического аппарата, к соответствующему порту ввода IP пакетов сигнально-информационных потоков бортового маршрутизатора 34 подключен выход блока 26 формирования циклов IP пакетов принятых отраженных зондирующих сигналов, информационный вход которого подключен к выходу блока 28 компрессии данных аналого-цифрового преобразования принятых отраженных сигналов, вход которого подключен к выходу сумматора 25 сигналов с К входами, соединенного с группой выходов блока 23 из К умножителей, первая группа К входов которого подключена к группе К выходов блоков 21, 22 приемных устройств отраженных зондирующих сигналов, а вторая группа К входов блока 23 из К умножителей подключена к группе К выходов генератора 24 псевдослучайных последовательностей, группа К входов блоков 21, 22 приемных устройств отраженных зондирующих сигналов подключена к выходам К активных элементов приемной антенной решетки 14, 16, соответствующие порты входа/выхода бортового маршрутизатора 34 подключены к соответствующим выходам/входам четырехканального блока 30 межспутниковых линий связи и к выходам/входам n-канального приемо-передающего блока 31 радиолиний связи с наземными приемными пунктами, выходы/входы которого подключены к приемо-передающим входам/выходам антенн 12 на радиолиниях связи с наземными пунктами, входы/выходы блока 30 МЛС подключены к четырем приемо-передающим антеннам 11 МЛС, два соответствующих порта бортового маршрутизатора 34 подключены к входным/выходным портам блока 33 управления функционированием ССПС, вход которого подключен к блоку 32 приема, декодирования и контроля частотных каналов на восходящий линиях ССПС, антенный вход блока 32 соединен с соответствующим антенным выходом 38 блока 18 формирования и управления ДН АР спутниковой связи, два других соответствующих порта бортового маршрутизатора 34 подключены к входным/выходным портам блока 36 управления функционированием системы ВИИШП, вход которого подключен к выходу блока 35 приема, декодирования и контроля частотных каналов на восходящий линиях системы ВИИШП, антенный вход которого подключен к соответствующему антенному выходу 39 блока 18 формирования и управления ДН АР на восходящих радиолиниях системы ВИИШП, управляющий выход 41 блока 33 управления функционированием системы спутниковой персональной связи и управляющий выход 40 блока 36 управления функционированием системы ВИИШП подключены к соответствующим управляющим входам блока 18 формирования и управления ДН АР спутниковой связи на вход которого поступают развязанные выходы 42 К АЭ с блока 21 приемных устройств отраженных зондирующих сигналов.
Наземный приемный пункт в составе наземного сегмента 10, содержит комплекс 65 средств ССПС, ВИИШП и ИТТС, который входами/выходами подключен к блоку 46 комплекса приемно-передающих станций форматирования, архивирования и хранения сигнально-информационных потоков, который соответственно подключен к входу блока 47 выбора массивов для текущей обработки, первый выход 49 блока 47 выбора массива принятых отраженных сигналов подключен к входу блока 48 декомпрессии, его выход подключен к группе входов блока 23 К умножителей, вторые К входы которого подключены к генератору 24 псевдослучайных последовательностей с К выходами, а группа К выходов блока 23 подключена к группе входов блока 53 формирования отраженных сигналов с узкой ДН, выход которого подключен к блоку 54 формирования разноракурсных РЛИ, второй вход которого соединен с выходом 52 блока 47 выбора массива зондирующих сигналов КА, а третий вход блока 54 соединен с выходом блока 63 формирования и архивации массива контрольно-юстировочных сигналов, вход которого соединен с блоком 61 спутниковой радионавигации, формирования опорных частот и сигналов синхронизации, а второй выход блока 63 подключен к передающему комплексу 62 КЮС, третий выход 51 блока 47 выбора массива данных о бортовом времени КА соединен с входом синхронизации генератора 24 псевдослучайных последовательностей, первым входом блока 57 задания пространственных координат и первым входом блока 56 привязки к карте, четвертый выход 50 блока 47 выбора массива данных эфемеридной информации соединен со вторыми входами блока 57 задания пространственных координат и блока 56 привязке к карте, первый выход блока 57 задания пространственных координат соединен с информационным входом блока 53 формирования отраженных сигналов с узкой ДН, второй выход блока 57 задания пространственных координат соединен с третьим информационным входом блока 56 привязки к карте, первый выход блока 54 формирования разноракурсных РЛИ соединен с входом блока 55 некогерентных накоплений РЛИ, выход которого подключен к четвертому входу блока привязки к карте 56, информационный выход которого подключен к входу блока 58 тематической обработки РЛИ, информационный выход 64 данных калибровки блока 54 формирования разноракурсных РЛИ соединен с входом блока 53 формирования отраженных сигналов с узкой ДН и с входом данных калибровки комплекса 60 управления функционированием ИИСС в составе НПП, порты входа/выхода комплекса 60 управления функционированием ИИСС в составе НПП соединены с комплексом 65 средств ССПС, ВИИШП и ИТТС, а управляющий выход 59 комплекса 60 управления функционированием ИИСС в составе НПП соединен с управляющими входами 59 комплекса 46 приемно-передающих станций форматирования, архивирования и хранения сигнально-информационных потоков, блока 47 выбора массивов текущей обработки, блока 63 формирования и архивации массива контрольно-юстировочных сигналов, блока 57 задания пространственных координат, блока 56 привязки к карте и блока 58 тематической обработки РЛИ.
Пример функционирования устройства спутниковой системы описан ниже.
КА №2i блок 2, №4i блок 4, №6i блок, №8i блок 8 кластера i излучают зондирующие сигналы в диапазоне рабочих частот ƒ1 через МЛА 17 и принимают отраженные зондирующие сигналы в диапазоне рабочих частот ƒ0 через элементы антенной решетки 16. КА №1i блок 1, №3i блок 3, №5i блок 5, №7i блок 7 кластера i спутникового сегмента 9 излучают зондирующие сигналы в диапазоне рабочих частот ƒ0 через МЛА 15 и принимают отраженные зондирующие сигналы в диапазоне рабочих частот ƒ1 через элементы антенной решетки 14. Схема частотного распределения рабочих диапазонов ƒ0 и ƒ1 зондирующих сигналов и приема отраженных зондирующих сигналов для КА в кластере представлена на фиг. 5.
Передающие МЛА 15 и МЛА 17 подключены соответственно к блоку 20 и 19 передающего устройства зондирующих сигналов и работают в либо в режиме «широкой ДН», либо в режиме «ДН с обужением». Задание этих режимов осуществляют блоком 37 управления и программирования режимов функционирования БСК КА, рабочие программы функционирования которого через бортовой маршрутизатор 34 по транспортным инфотелекоммуникационным каналам МЛС 30 и на радиолиниях связи с НПП 31 вырабатываются и поступают с наземного комплекса 60 управления ИИСС в составе НПП через узловой маршрутизатор 70 и приемо-передающие станции 46 НПП.
Выходы 43, 44, 45 блока 37 управления и программирования режимов функционирования БСК КА соответственно подключены к управляющему входу блока 26 формирования циклов IP пакетов принятых отраженных зондирующих сигналов, к управляющему входу блока 29 формирования циклов IP пакетов зондирующих сигналов и управляющему входу блоков 19, 20 передающего устройства для их синхронного функционирования.
Зондирующие сигналы на блоки 20, 19 передающих устройств поступают с блока 29 формирования циклов IP пакетов зондирующих сигналов, передаются непрерывно и представляют собой сформированную серию циклов из IP пакетов информации, передаваемой на нисходящих линиях ССПС и ВИИШП. Они формируются с использованием информации, направляемой в адрес активных абонентов ССПС 67 и ВИИШП 69, которая поступает из наземных транспортных сетей во взаимодействии соответствующих наземных 66 и 68 и бортовых 33, 36 комплексов управления и контроля. Нисходящие потоки IP пакетов ССПС и ВИИШП выбираются бортовым маршрутизатором 34 по адресу заголовка из всех транслируемых информационных IP потоков по межспутниковым и восходящим линиям связи с приемо-передающих комплексов НПП 10. При недостаточном количестве активных абонентов по отношению к постоянной скорости передачи на радиолинии зондирования блоки 29 формирования суперциклов в нисходящий поток добавляют пакеты с квазиортогональными зондирующими последовательностями известной структуры (виртуальные абоненты). Начало цикла передачи IP пакетов зондирующих сигналов содержит заголовок, в котором содержится информация о номере КА, номере цикла, о времени начала излучения цикла и его формате. Битовый массив циклов зондирующих сигналов с выхода блока формирования 29 через бортовой маршрутизатор 34 по МЛС 30 и РПД 31 поступает в архив 46 НПП. В блоках формирования циклов IP пакетов зондирующих сигналов 29 для каждого из диапазонов рабочих частот обеспечивается выбор возможных видов модуляции и сигнально-кодовых конструкций излучаемых сигналов.
В режиме «широкой ДН» зондирующие сигналы КА облучают все области земной поверхности и околоземного пространства в его зоне видимости вследствие широкой ДН передающих МЛА 15 и 17. В режиме «ДН с обужением» зондирующие сигналы КА облучают ограниченные области земной поверхности вследствие узкой ДН МЛА, однако при этом обеспечивается повышение энергетического бюджета радиолокационного зондирования, что значительно уменьшает длительность времени, требуемой для взаимно-корреляционной обработки зондирующих и принятых отраженных зондирующих сигналов с узкой ДН в блоке 54 и получения РЛИ в «обуженной» зоне.
Блок 21 приемного устройства и активные элементы приемной антенной решетки 16 КА №2i, №4i, №6i, №8i принимают отраженные зондирующие сигналы в рабочем диапазоне частот ƒ0, излучаемые КА №1i, №3i, №5i, №7i. Блок 22 приемного устройства и активные элементы приемной антенной решетки 14 КА №1i, №3i, №5i, №7i принимают отраженные зондирующие сигналы в рабочем диапазоне частот ƒ1, излучаемые КА №2i, №4i, №6i, №8i.
Принятые отраженные зондирующие сигналы на КА с каждого из К активных элементов приемных АР 14 и 16 через блок К-канальных приемных устройств 22 и 21, соответственно, поступают на входы блока К умножителей 23, где перемножаются с индивидуальными сигналами псевдослучайных последовательностей, поступающих с генератора 24 с К выходами и, далее, на вход сумматора сигналов 25 с К входами, действие которых обеспечивает кодовое уплотнение отраженных зондирующих сигналов, принятых К АЭ антенной решетки 14, 16. Синхронизация генераторов последовательностей 24 осуществляется сигналами бортового времени КА, поступающими с выхода блока 27 спутниковой радионавигации, который обеспечивает формирование опорных частот и сигналов синхронизации для всех бортовых блоков приема и передачи радиосигналов, передаваемых по МЛС и радиолиниям связи с НПП и тактовых частот формирования и трансляции всех информационно-сигнальных IP пакетов. Суммарный сигнал с кодовым уплотнением от всех принятых К отраженных зондирующих сигналов элементами АР с выхода сумматора сигналов 25 поступают на вход блока 28 компрессии данных аналого-цифрового преобразования принятых отраженных сигналов для уменьшения требуемой скорости их передачи по каналам МЛС и РПД на НПП.
Блок 26 формирования циклов IP пакетов принятых отраженных зондирующих сигналов формирует в стандартные IP пакеты данные из последовательно поступающих на его вход цифровых отсчетов суммарного отраженного сигнала с кодовым уплотнением. Заголовок каждого пакета содержит его идентификационную информацию и номер пакета в цикле. Начало каждого цикла IP пакетов отраженных зондирующих сигналов содержит пакет заголовка цикла, в котором содержится информация о номере КА, номере цикла, о времени начала приема сигнала в цикле (время поступления первого цифрового отсчета аналого-цифрового преобразования на входе/выходе блока 25 компрессии) и его формате. Скорость обработки этих пакетов в бортовом маршрутизаторе 34 и скорость передачи циклов IP пакетов отраженных зондирующих сигналов по МЛС 30 и РПД 31 значительно выше их скорости формирования. Это позволяет восстановить на НПП входную последовательность аналого-цифровых отсчетов принятых отраженных сигналов на КА по выходу блока 48 декомпрессии, а по номерам заголовков пакетов и циклов их формирования произвести правильную их сборку и контроль целостности во избежание ложных РЛИ.
Информация в IP пакетах данных со своим адресом пакета с выхода блока 27 спутниковой радионавигации поступает на вход соответствующего порта бортового маршрутизатора 34 и содержит номер КА, информацию эфемерид КА, бортовое время КА, необходимые для обеспечения синхронной работы генератора 24 псевдослучайных последовательностей с К выходами, для работы блока 53 формирования отраженных сигналов с узкой ДН, для формирования разноракурсных радиолокационных изображений в блоке 54 и их привязки к карте в блоке 56 на наземном сегменте 10.
Прием/передачу информации по линиям КА-КА осуществляют по радиолиниям МЛС 30 с антеннами 11 МЛС. Приемо-передающие 4-х канальные блоки МЛС осуществляют контроль качества приема и для его сохранения в процессе движения КА по орбите обеспечивают управление наведением приемо-передающих антенн 11 МЛС. В приполярных зонах продолжают функционировать только МЛС вдоль плоскости орбиты, после прохождения приполярных зон по сигналам в режиме радиомаяка восстанавливается функционирование МЛС между КА кластера на смежных орбитальных плоскостях.
Прием/передачу сигнально-информационных потоков между БСК КА и НПП осуществляют с использованием n-канальных приемопередающих блоков 31 линий связи с НПП с приемо-передающими антеннами радиолиний КА 12. Количество n- каналов и n- антенн определяется при проектировании и реализации ИИСС в зависимости от предъявляемых требований по одновременной приемо-передаче сигнально-информационных потоков на n-1 НПП. В связи с высокой скоростью перемещения КА по орбите, один из каналов приемо-передачи и одна из антенн находится в режиме перенацеливания на новый НПП под управлением бортового блока 37 и наземного комплекса управления функционированием 60.
Скорость передачи на МЛС и радиолиниях РПД выше требуемой для решения всех задач информационной нагрузки. При ее недостатке блоки 30 и 31 дополняют эти потоки виртуальными пакетами, обеспечивающими синхронный режим приема-передачи.
Сигнально-информационные потоки с видимых КА кластера по радиолиниям связи с НПП поступают на наземный сегмент 10 - на комплекс 46 приемно-передающих станций форматирования и архивирования сигнально-информационных потоков на нисходящих РПД, содержащих зондирующие сигналы, отраженные сигналы с АЭ приемных решеток, эфемеридную информацию и информацию о бортовом времени КА, обеспечивающих решение задач радиолокации, приема-передачи IP пакетов ССПС, ВИИШП, ИТТС и команд управления, телеметрического контроля и программирования БСК КА.
Требуемый для решения задачи радиолокационного зондирования сигнально-информационный массив из архива хранения 46 под воздействием управляющего входа 59 от комплекса 60 управления поступает в блок 47 выбора массивов зондирующих сигналов, отраженных зондирующих сигналов, эфемеридной информации, бортового времени КА для текущей обработки или для последующей обработки и получения РЛИ в назначенное время и в требуемой зоне поверхности Земли. С выхода 49 блока 47 выбора массивов выделенный массив отраженных зондирующих сигналов, принятых тремя и более КА кластера из совместной зоны радиолокационного наблюдения, поступает на вход блока 48 декомпрессии. Восстановленные на временной оси цифровые отсчеты суммарного сигнала с кодовым уплотнением с выхода блока 48 декомпрессии поступают на первую группу входов блока умножителей 23, на вторую группу входов которого поступают сигналы с генератора 24 псевдослучайных последовательностей для кодового разделения всех К парциальных сигналов, принятых АЭ АР соответствующих КА кластера. Корректное кодовое разделение обеспечивается за счет обеспечения точной синхронизации работы бортовых и наземных генераторов 24 псевдослучайных последовательностей с К выходами.
Группа отраженных сигналов с выхода блока умножителей 23, соответствующих сигналам К активных элементов, поступает на группу входов блока 53 формирования отраженных зондирующих сигналов с использованием технологии фазирования сигналов (технология MIMO-РЛС [11]). Этот блок 53 обеспечивает формирование отраженных зондирующих сигналов с узкой ДН приемных АР с заданного направления по общему участку заданной зоны радиолокационного зондирования. Задание направления формируемой узкой ДН приемных АР 14 и 16 осуществляется по данным блока 57 задания пространственных координат (задает участок зоны наблюдения земной поверхности и околоземного пространства при формировании отраженных сигналов с использованием технологии фазирования сигналов) под управляющим входом 59. Эти данные определяют азимутальный угол и угол места в пределах диаграммы направленности передающих МЛА 15 и 17 и учитывают геометрию расположения АЭ приемных АР 14 и АР 16 на КА-ретрансляторах при формировании узкой ДН.
Цифровые отсчеты отраженных сигналов с узкой ДН с выхода блока 53 и массивы отсчетов зондирующих сигналов КА 52, восстановленные на требуемом отрезке времени в блоке 47 выбора текущего массива и декомпрессии, поступают на соответствующие входы блока 54 формирования разноракурсных РЛИ, в котором получают изображения земной поверхности и околоземного пространства путем использования технологии синтезирования апертуры на основе взаимно-корреляционной обработки сформированных отраженных сигналов с узкой ДН, принятых с трех и более направлений и зондирующих сигналов для каждого КА кластера. Формирование разноракурсных РЛИ в блоке 54 выполняют на основе технологии синтеза антенной апертуры в прожекторном или маршрутном режиме с использованием моделей статических (неподвижных) и динамических (подвижных) объектов.
Контроль и калибровку амплитудно-фазовых характеристик бортовых трактов приема отраженных зондирующих сигналов, используемых для формирования узких ДН приема с задаваемых направлений и для формирования ДН АР спутниковой связи в блоке 18 спутникового сегмента, осуществляют путем формирования излучения контрольно-юстировочных сигналов передающим комплексом 62 КЮС и блоком 63 формирования и архивации массива контрольно-юстировочных сигналов на НПП. Начальное время излучения и архивации этих сигналов привязано к общей шкале времени в блоке 63 формирования и архивации массива контрольно-юстировочных сигналов с использованием синхронизации по сигналам блока 61 спутниковой радионавигации НПП. В блоке 54 взаимно-корреляционной обработки зондирующих и принятых отраженных зондирующих сигналов и формирования разноракурсных РЛИ реализуется дополнительный канал взаимно-корреляционной обработки ретранслированных отраженных зондирующих сигналов с опорной копией излученного контрольно-юстировочного сигнала, результаты данной обработки с информационного выхода 64 данных калибровки поступают в блок 53 формирования отраженных сигналов с узкой ДН и на вход данных калибровки комплекса 60 управления функционированием ИИСС в составе НПП. Последующая трансляция данных калибровки по каналам комплекса средств ССПС, ВИИШП и территориальных ИТТС позволяет их использование на других НПП и корректного управления формированием ДН АР спутниковой связи на борту КА-ретрансляторов спутникового сегмента.
С выхода блока 54 РЛИ поступают на блок 55 некогерентных накоплений РЛИ. В блоке 55 осуществляют некогерентное накопление совмещенных разноракурсных РЛИ с целью повышения энергетического бюджета радиолиний [12]. Оценивание эффективности повышения энергетического бюджета радиолиний при реализации этого направления приведено в Приложении 1. В блоке 56 осуществляют привязку вычисленных РЛИ земной поверхности и околоземного пространства к пространственным координатам местности существующих географических карт. Привязку осуществляют на основе массива данных эфемеридной информации 50 и массива данных информации о бортовом времени 51 КА кластера. Эти же массивы 50, 51 поступают и на информационные входы блока 57 задания пространственных координат.
В блоке 58 осуществляют тематическую обработку и интерпретацию РЛИ земной поверхности и околоземного пространства (обнаружение объектов, их сопровождение, определение кинематических характеристик). Обнаружение объектов осуществляется после некогерентного накопления с задаваемыми вероятностными характеристиками, методика оценивания вероятностных характеристик с учетом некогерентного накопления приведена в Приложении 1. Сопровождение объектов осуществляется с использованием статических и динамических моделей. Оценивание кинематических характеристик объектов (пространственных координат и параметров движения подвижных объектов) осуществляется с использованием известных методов, в частности, с использованием метода на основе разностно-дальномерных измерений и вычислении разности доплеровского сдвига отраженных зондирующих сигналов, принятых с трех и более направлений приема в блоке 54 [14].
Фиг. 6 иллюстрирует этот метод, основанный на радиолокационных измерениях псевдодальностей (времени распространения зондирующего сигнала от излучающего КА до объекта отражения в совместной зоне видимости околоземной поверхности и от объекта отражения до трех КА кластера, принимающих отраженные сигналы). На фиг. 6 даны приемно-передающие позиции пяти космических аппаратов КА в составе кластера, где КА№5 - излучает зондирующий сигнал, КА№2, КА№4 и КА№8 принимают отраженные сигналы, КА№6 не имеет возможности принять отраженный сигнал от показанной на Фиг. 6 точки зоны облучения, так как она не лежит в его текущей зоне видимости. Работа бортовых средств на всех КА по времени синхронизируется сигналами спутниковых систем (ГЛОНАСС/GPS). Сформированные на КА циклы IP пакетов зондирующих и принятых отраженных зондирующих сигналов по МЛС спутниковой транспортной сети поступают на ближайший (или требуемый) НПП.
На НПП на основе оценочных значений псевдодальностей от трех и более направлений приема отраженного от объекта (дальности получают после восстановления трехмерного РЛИ), разностей времени прихода, значений и разностей значений доплеровского сдвига частоты отраженных сигналов вычисляют пространственные координаты, ведут селекцию подвижных объектов и оценку их кинематических параметров [13]. Эта задача выполняется функциональными блоками 54, 55, 56, 57, 58, представляющими собой единый информационно-вычислительный комплекс, обеспечивающий задачи архивирования и хранения сигнально-информационных потоков в блоках 46, 47, обмена массивами данных и их обработки в блоках 53, 54, 55, 56, 57 и 58.
Функциональная задача комплекса 66 наземного сегмента - выполнение протоколов глобальной ССПС в части распределения каналов трафика и доступа абонентских терминалов к услугам связи (управление, контроль, синхронизация, т.д.), выполняемых через второй порт 74 входа/выхода IP потоков ССПС узлового маршрутизатора IP пакетов 70 и через третий порт 77 входа/выхода IP потоков ССПС шлюзовой станции 71. Комплекс 67 наземного сегмента представляет абонентские станции системы глобальной ССПС в составе интегрированной информационной спутниковой системы (ИИСС).
С учетом близости рабочих частот диапазонов, для реализации качественных ССПС и ВИИШП в составе общего КА с функцией радиолокационного зондирования используются АЭ приемных антенн отраженных зондирующих сигналов 14, 16 для формирования диаграмм направленности приемных антенн ССПС и ВИИШП, где для этого развязанные выходы АЭ с малошумящих усилителей блоков приемных устройств отраженных зондирующих сигналов 21, 22 через группу входов 42 подаются на блок 18 формирования и управления ДН антенных систем спутниковой связи (ССПС и ВИИШП), управляющие входы 40, 41 которого соединены с управляющими выходами соответствующих блоков управления функционированием ССПС и ВИИШП 33, 36, а два антенных выхода 38, 39 с сформированными ДН подключены к соответствующим антенным входам блоков 32, 35 приема, декодирования и контроля частотных каналов на восходящий линиях ССПС и ВИИШП.
Функциональная задача блока 68 наземного сегмента - выполнение протоколов системы ВИИШП для абонентских каналов (управление, контроль, синхронизация, т.д.), выполняемых через третий порт 75 входа/выхода IP потоков ВИИШП узлового маршрутизатора 70 IP пакетов и через третий порт 78 входа/выхода IP потоков ВИИШП шлюзовой станции 71 с территориальными ИТТС.
Блок 72 сетевых интерфейсов и протоколов обеспечивает поддержку и сопряжение IP сетевых протоколов и сигнализации открытых сетевых систем OSI-7 [6], принятых в территориальных ИТТС и реализуемых в спутниковом сегменте ИТТС, выполняемых через первый порт 73 входа/выхода IP потоков ИТТС узлового маршрутизатора 70 IP пакетов и через первый порт 76 входа/выхода IP потоков ИТТС шлюзовой станции 71 шлюзовой станции доступа в территориальные ИТТС и их линии связи 79 (как правило ВОЛС).
Комплекс средств ССПС, ВИИШП и ИИТС подключен через порты входа/выхода групповых сигнально-информационных IP потоков с комплексом 46 приемо-передающих станций и с комплексом 60 управления функционированием ИИСС в составе НПП.
Для функционирования ССПС и ВИИШП через спутниковый сегмент ИИСС необходима адаптация общепринятых протоколов доступа к ее частотно-временным ресурсам, установления и поддержания сеансов связи, включая протокол поддержки режима «хэндовера», поскольку в отличие от традиционных систем спутниковой связи в ИИСС «восходящие» и «нисходящие» линии связи абонентского терминального оборудования идут через различные разнесенные КА кластера спутникового сегмента.
Распределенный комплекс 60 управления функционированием ИИСС в составе каждого НПП наземного сегмента осуществляет управление интегрированной спутниковой системы и задает режимы функционирования составляющих блоков бортового специального комплекса КА.
Устройство, реализующее предложенный способ, обеспечивает решение проблем глобальной многопозиционной радиолокации земной поверхности и околоземного пространства для обнаружения и сопровождения объектов с использованием их статических и динамических моделей, как в режиме реального времени, так и в режиме воспроизведения в прошлом для восстановления произошедших ситуационных событий. Так же решаются задачи глобальной ССПС и ВИИШП с характеристиками, эквивалентными или превышающими характеристикам известных спутниковых систем аналогичного назначения, и создание коммутируемой сети требуемых спутниковых транспортных каналов, резервирующих и дополняющих территориальные ИТТС.
В зависимости от требуемого уровня квазинепрерывности радиолокационного наблюдения отдельных районов земной поверхности, высоты орбит, количества орбитальных плоскостей и размещенных на них КА, реализованных энергетических параметров излучения и направленности передающих антенных систем, предлагаемая спутниковая система ИИСС может содержать от 72 (12 плоскостей по 6 КА), 144 (12 плоскостей по 12 КА), 288 (24 плоскости по 12 КА) и до 576 (24 плоскости по 24) КА на высотах от 400 до 850 км для решения заявленных задач:
- глобальной квазинепрерывной или непрерывной многопозиционной радиолокации земной поверхности и околоземного пространства (зависит от состава орбитальной группировки и координат (широты и долготы) зоны земной поверхности) в режиме реального времени и в режиме хранения и последующего воспроизведения при анализе чрезвычайных событий в прошлом,
- глобальной спутниковой персональной связи,
- глобальной передачи видеовещания и интерактивных услуг, включая широкополосный доступ в Интернет,
- реализации спутниковой сети транспортных IP каналов
с соответствующим возрастанием их пропускной способности, количества и качества обслуживания абонентов.
В приложении 1 приведена оценка требуемого энергетического бюджета радиолиний излучения и приема отраженных зондирующих сигналов для активно-пассивной радиолокации.
Частотные полосы зондирующих сигналов КА могут достигать до 150 МГц, что обеспечивает разрешение по дальности до 2 м, причем такое же разрешение можно получить и при меньшей ширине полосы зондирующих сигналов для объектов с большой отражающей поверхностью за счет применения соответствующих алгоритмов обработки отсчетов взаимно-корреляционных функций.
Вероятностные характеристики обнаружения объектов активно-пассивной многопозиционной радиолокации определяются энергетическим бюджетом радиолинии, в соответствии с методикой (приложение 1) - выполняется условие обнаружения с вероятностью ложной тревоги 0.001 и вероятностью правильного обнаружения Робн=0.95 для объектов с эффективной площадью рассеяния σ0≥10 м2, количество некогерентных накоплений равно 4 (время анализа ТПВ=4 с, время когерентной обработки 1 с).
Увеличение энергетического бюджета возможно при использовании МЛА в режиме включения частных парциальных лучей с перераспределением мощности передающих устройств (режим «ДН с обужением»). Для МЛА (7 лучей) для режима активного одного луча для рассматриваемых параметров системы выполняется условие обнаружения с вероятностью ложной тревоги 0.001 и вероятностью правильного обнаружения Робн=0.95 для объекта наблюдения с ЭПР σ0≥10 м2 при времени когерентного накопления tког≅0.23с без некогерентных накоплений по времени (время анализа ТПВ=0.23с).
В приложении 2 приведены кинематические характеристики низкоорбитальных КА, на основе которых обосновывается количество КА с использованием относительной площади обзора  , т.е. минимальное количество КА можно определить соотношением NКА≅β/γ (здесь β≈2 - коэффициент, учитывающий неравномерность покрытия диаграммами направленности земного шара). Для Н=400 км значение относительной площади обзора равно γ=0.011 и NКА≅180. Моделирование орбитальных группировок с высотой Н=450 км и для NКА≅500 с параметрами диаграмм направленности МЛА, приведенными в Приложении 2, показывает, что в районах, прилегающих к экватору, наблюдается пересечение диаграмм направленности от не менее чем 3 КА. При увеличении широты количество КА с пересекающимися ДН возрастает и для широты 400 наблюдается пересечение ДН для более 5 КА.
, т.е. минимальное количество КА можно определить соотношением NКА≅β/γ (здесь β≈2 - коэффициент, учитывающий неравномерность покрытия диаграммами направленности земного шара). Для Н=400 км значение относительной площади обзора равно γ=0.011 и NКА≅180. Моделирование орбитальных группировок с высотой Н=450 км и для NКА≅500 с параметрами диаграмм направленности МЛА, приведенными в Приложении 2, показывает, что в районах, прилегающих к экватору, наблюдается пересечение диаграмм направленности от не менее чем 3 КА. При увеличении широты количество КА с пересекающимися ДН возрастает и для широты 400 наблюдается пересечение ДН для более 5 КА.
В приложении 3 приведена методика оценивания энергетического бюджета нисходящей радиолинии (космический аппарат-абонентская станция) и его численные оценки с учетом межканальных помех, полученные для примерного варианта - требуемая вероятность ошибки на информационный бит 0.001 обеспечивается при использовании помехоустойчивого сверточного кода с кодовой скоростью 1/2 и кодовым ограничением 9 для пропускной способности КА до 1000 каналов с информационной скоростью 4800 бит/с, использованием сигналов QPSK с мощностью передатчика до 2000 Вт, λ=0.03 м и с частотной полосой 10.0 МГц с энергетическим запасом до 3.0…7.5 дБ. Повышение энергетического бюджета более чем в 3 раза (на 5 дБ) для данных параметров радиолинии КА возможно, учитывая пересечение диаграмм направленности передающих антенн для более 3 КА, а также используя более мощные схемы помехоустойчивого кодирования - турбо-кодов, низкоплотностных кодов.
Протокол глобальной ССПС может базироваться на протоколе спутниковой системы персональной связи Globalstar с кодовым разделением каналов.
Примерный протокол для организации глобальной ВИИШП в пакетном режиме может базироваться на аналогичных протоколах доступа к частотно-временным ресурсам, TCP/IP протоколах доступа к информационным ресурсам Интернет сетей и протоколе цифрового видеовещания на основе протокола системы спутникового цифрового телевидения DVB-S2.
В приложении 4 приведена методика оценивания энергетического бюджета нисходящей радиолинии (космический аппарат-абонентская станция) и его численные оценки.
Приведен расчет энергетического бюджета данной радиолинии с параметрами - информационная скорость до R=155 Мбит/с, частотная полоса до ΔF=140.0 МГц, λ=0.03 м, вероятность ошибки на информационный бит равна Рб=10-7, требуемое значение сигнал/помеха  дБ (для помехоустойчивого низкоплотностного кода в сочетании с сигнальным созвездием 32APSK с максимальной спектральной эффективностью 4.45, используемого в спутниковой системе DVB-S2), мощность передатчика Рпер=2000 Вт. Для обеспечения требуемых вероятностных характеристик с энергетическим запасом для точки надира до 6 дБ (до 3 дБ для угла β=6.040) требуется приемная антенна с Gпр=200 (апертура D=0.19 м). Повышение энергетического бюджета более чем в 3 раза (на 5 дБ) для данных параметров радиолинии КА возможно, учитывая пересечение диаграмм направленности передающих антенн для более 3 КА.
дБ (для помехоустойчивого низкоплотностного кода в сочетании с сигнальным созвездием 32APSK с максимальной спектральной эффективностью 4.45, используемого в спутниковой системе DVB-S2), мощность передатчика Рпер=2000 Вт. Для обеспечения требуемых вероятностных характеристик с энергетическим запасом для точки надира до 6 дБ (до 3 дБ для угла β=6.040) требуется приемная антенна с Gпр=200 (апертура D=0.19 м). Повышение энергетического бюджета более чем в 3 раза (на 5 дБ) для данных параметров радиолинии КА возможно, учитывая пересечение диаграмм направленности передающих антенн для более 3 КА.
В приложении 5 приведены: структура построения циклов передачи IP пакетов зондирующих сигналов, циклов IP пакетов принятых отраженных сигналов и возможные варианты использования диапазонов рабочих частот, выделенных Международным Регламентом на первичной основе для космических средств радиолокационного зондирования, в интересах реализации активно-пассивной многопозиционной радиолокации, организации функционирования ССПС и ВИИШП.
Действие кодового уплотнения и разделения принятых отраженных сигналов АЭ антенной решетки, производимое блоком 23 К умножителей, генератором 24 псевдослучайных последовательностей с К выходами и сумматором 25 сигналов с К входами на спутниковом и на наземном сегментах обусловливает возникновение интерференционных межканальных помех. Оценка мощности этих помех приведена в приложении 6.
Таким образом, предлагаемый способ и его реализующее устройство решают заявленные целевые задачи интегрированной спутниковой системы с функциями:
- глобальной активно-пассивной многопозиционной радиолокации земной поверхности и околоземного пространства с использованием моделей статических и динамических объектов, как в режиме реального времени, так и в режиме воспроизведения в прошлом для восстановления произошедших ситуационных событий;
- глобальной персональной связи;
- глобальной передачи видеовещания, интерактивных услуг, включая доступ в Интернет, широкополосных приложений в пакетном режиме;
- спутниковой инфотелекоммуникационной транспортной сети, резервирующей и дополняющей территориальные транспортные ИТТС.
Предлагаемое техническое решение промышленно применимо, так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособность и воспроизводимость. Блоки в составе изобретения технически реализуемые, имеют аналоги по назначению в составе изобретения, используются в известных спутниковых системах телекоммуникаций, в спутниковых системах глобальной навигации. [6], [9], [14].
Источники информации:
1. Радиолокационные станции обзора Земли / Под ред. Г.С. Кондратенкова. - М.: Радио и связь, 1983. - 272 с.
2. Патент №2278398 от 06.07.2004.
3. Электромагнитные волны и электронные системы, 2013, т. 18, №5, стр. 98-101.
4. Зарубежное военное обозрение. 2010. №8, стр. 63-68.
5. Полезная модель RU 112446, 10.01.2012.
6. Камнев В.Е., Черкасов В.В., Чечин Г.В. Спутниковые сети связи. М. ООО «Военный Парад», 2010, 608 с.
7. ETSI EN 302 307 v. 1.2.1. Digital Video Broadcasting. Second Generation framing structure, channel coding and modulation systems for Broadcasting, Interactive Services, New Gathering and other broadband satellite applications (DVB-S2). European Telecommunications Standards Institute. 2009, 78 p.
8. Электроника: Наука, Технология, Бизнес, 2000, №1, стр. 46-48.
9. Верба B.C., Неронский А.Б., Осипов И.Г., Турук В.Э. Радиолокационные системы землеобзора космического базирования. М.: Радиотехника, 2010, стр. 60-63, 113-115.
10. Руководство CISCO по междоменной многоадресной маршрутизации. 2004. М.: Вильяме, с. 320.
11. Черняк B.C. О новом направлении в радиолокации: МIМО-РЛС. // Прикладная радиоэлектроника. 2009. Т. 8. №4, стр. 477-489.
12. Скляр Б. Цифровая связь. Теоретические основы и практическое применение. 2003. М.: Изд. Дом «Вильяме», стр. 1104.
13. Теоретические основы радиолокации. / Под ред. В.Е. Дулевича. 2-е изд., перераб., и доп. М.: Сов. радио, 1978. 608 с.
14. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп. - М.: Радиотехника. 2010. 800 с.
Приложение 1. Энергетический бюджет радиолинии для активно-пассивной радиолокации в составе интегрированной спутниковой системы.
Вероятность правильного обнаружения Робн с неопределенной начальной фазой (некогерентное обнаружение) определяется выражением

Здесь  - функция Бесселя.
- функция Бесселя.  , Рл.тр - вероятность ложной тревоги; Ес - энергия сигнала, N0 - спектральная плотность шума [Теоретические основы радиолокации. / Под ред. В.Е. Дулевича. 2-е изд., перераб., и доп. М.: Сов. радио, 1978. 608 с.].
, Рл.тр - вероятность ложной тревоги; Ес - энергия сигнала, N0 - спектральная плотность шума [Теоретические основы радиолокации. / Под ред. В.Е. Дулевича. 2-е изд., перераб., и доп. М.: Сов. радио, 1978. 608 с.].
На фиг. П1.1 приведены вероятностные характеристики некогерентного обнаружения для вероятностей ложной тревоги Рл.тр. Видно, что для Рл.тр=0.001 вероятность правильного обнаружения Робн=0.95 достигается при значении сигнал/помеха q=5.75, то есть 

Расчет энергетического бюджета РЛС основывается на соотношении

Здесь:
Рпер - мощность сигналов передатчика,
Рпр - мощность сигналов на входе приемника,
 - КНД передающей антенны,
- КНД передающей антенны,
Dпер - апертура передающей антенны,
ηпер - к.п.д. передающей антенны (при расчетах 0.75),
 - КНД приемной антенны,
- КНД приемной антенны,
Dпр - апертура приемной антенны,
ηпр - к.п.д. приемной антенны (при расчетах 0.75),
 - длина волны (при расчетах 0.03 м),
- длина волны (при расчетах 0.03 м),
Нпер - расстояние от передатчика КА до земного объекта радиолокации,
Нпр - расстояние от приемника КА до земного объекта радиолокации,
с=3⋅108 м/с - скорость света,
ƒ - рабочая частота,
 - ширина диаграммы (град),
- ширина диаграммы (град),
σ0 - ЭПР объекта.
Относительно отношения сигнал/помеха Ес/N0 справедливо соотношение

Здесь:
- Т - длительность сигналов,
- N0=kT0 - спектральная плотность аддитивных тепловых шумов (односторонняя) k=1.38⋅10-23 - постоянная Больцмана, T0 - температура приемной антенны (при расчетах  ), т.е. N0=7⋅10-21 Вт/Гц,
), т.е. N0=7⋅10-21 Вт/Гц,
- ΔF - частотная полоса сигналов.
Энергетический бюджет увеличивается с учетом:
- некогерентного накопления во времени, определяемое коэффициентом увеличения  , TA - время анализа (обработки) сигналов;
, TA - время анализа (обработки) сигналов;
- некогерентного накопления при обработке сигналов Nпер передающих КА,
- некогерентного накопления при обработке сигналов Nпр принимающих КА.
Результирующее выражение для энергетического бюджета имеет вид

В таблице П1.1 приведены параметры системы и результаты оценивания энергетического бюджета.
Из данных таблицы П1.1 видно, что для рассматриваемых параметров системы выполняется условие обнаружения с вероятностью ложной тревоги 0.001 и вероятностью правильного обнаружения Робн=0.95 для объекта наблюдения с ЭПР σ0≥10 м2, количество некогерентных накоплений равно 4 (время анализа TA=4 с, время когерентного приема tког=1 с).

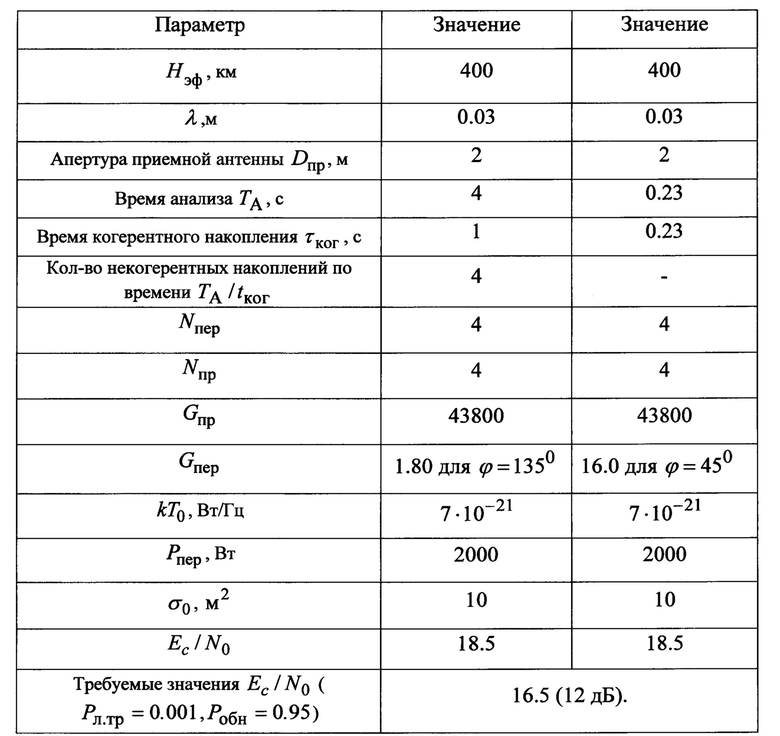
Увеличение энергетического бюджета возможно при использовании МЛА в режиме включения частных парциальных лучей с перераспределением мощности передающих устройств (режим «ДН с обужением»). В качестве примера на фиг. П1.2 приведена схема лучей МЛА - 7 лучей. В этом случае для режима активного одного луча для рассматриваемых параметров системы выполняется условие обнаружения с вероятностью ложной тревоги 0.001 и вероятностью правильного обнаружения Робн=0.95 для объекта наблюдения с ЭПР σ0≥10 м2 с временем когерентного накопления tког≅0.23 с без некогерентных накоплений по времени (время анализа TA=0.23 с).
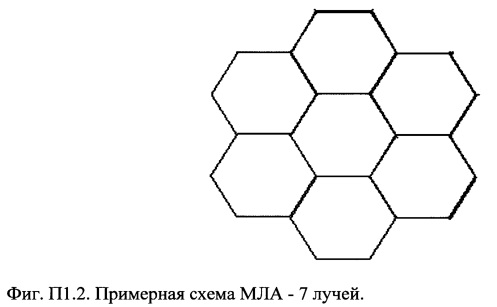
Приложение 2. Кинематика низкоорбитальных космических аппаратов.
К основным кинематическим характеристикам относят зону видимости, продолжительность наблюдения. Фиг. П1.2 поясняет эти определения [ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И. Перова, В.Н. Харисова. Из.. 4-е, перераб. и доп. - М.: Радиотехника. 2010. 800 с.].

Размер зоны видимости, для которой КА наблюдается из точки O3 от времени восхода τвх до времени захода τвых, характеризуется углом βмакс или дугой ∩СС'

С учетом угла маски α радиус зоны обзора определяется соотношением

Площадь зоны обзора равна

Относительная площадь обзора равна

Скорость КА определяется соотношением

Скорость подспутниковой точки на земной поверхности

Время прямой видимости ТПВ земного объекта определяется соотношением

Расстояние от КА до земного объекта L определяется соотношением

Угол раскрыва ϕ имеет вид

В таблице П2.1 приведены кинематические характеристики, варьируемый параметр - высота КА Н.
Видно, что угол раскрыва ϕ практически не зависит от высоты Н и равен ϕ≅2.23 рад.
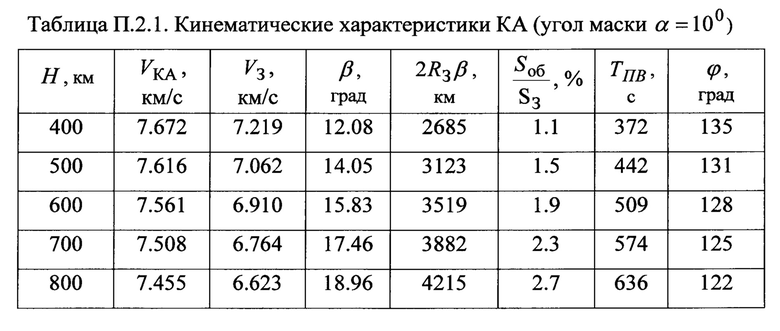
Приложение 3. Энергетический бюджет радиолинии для персональной связи в составе интегрированной спутниковой системы.
Приведен расчет энергетического бюджета системы персональной связи CDMA - пропускная способность до K=1000 каналов с информационной скоростью R=4800 бит/с, сигналы QPSK, частотная полоса ΔF=10.0 МГц, λ=0.03 м, вероятность ошибки на информационный бит равна Рб=0.001, требуемое значение сигнал/помеха  (для помехоустойчивого сверточного кода с кодовой скоростью 1/2 и кодовым ограничением 9, используемого в спутниковой системе персональной связи Globalstar). В этом случае спектральная плотность межканальных помех Iмк равна [Скляр Б. Цифровая связь. Теоретические основы и практическое применение. 2003. М.: Изд. Дом «Вильяме», стр. 1104]
(для помехоустойчивого сверточного кода с кодовой скоростью 1/2 и кодовым ограничением 9, используемого в спутниковой системе персональной связи Globalstar). В этом случае спектральная плотность межканальных помех Iмк равна [Скляр Б. Цифровая связь. Теоретические основы и практическое применение. 2003. М.: Изд. Дом «Вильяме», стр. 1104]

Мощность сигналов Рпер=2000 Вт, оценочное значение сигнал/помеха оценивается с использованием соотношения

Для Gпер=1.85, Gпр=2, Н=400 км оценочное значение сигнал/помеха равно  . По отношению к требуемому значению
. По отношению к требуемому значению  запас по энергетике достигает 6.0 (7.8 дБ). По отношению к углу β=6.040 для абонентской станции запас по энергетике достигает 3.0 дБ. Повышение энергетического бюджета более чем в 3 раза (на 5 дБ) получается для данных параметров радиолинии КА, учитывая указанное пересечение диаграмм направленности передающих антенн для более 3 КА.
запас по энергетике достигает 6.0 (7.8 дБ). По отношению к углу β=6.040 для абонентской станции запас по энергетике достигает 3.0 дБ. Повышение энергетического бюджета более чем в 3 раза (на 5 дБ) получается для данных параметров радиолинии КА, учитывая указанное пересечение диаграмм направленности передающих антенн для более 3 КА.
Приложение 4. Энергетический бюджет радиолинии для глобальной передачи видеовещания, интерактивных услуг, включая доступ в Интернет в составе интегрированной спутниковой системы.
Приведен расчет энергетического бюджета системы глобальной передачи видеовещания, интерактивных услуг, включая доступ в Интернет, широкополосных приложений в пакетном режиме в составе интегрированной спутниковой системы - информационная скорость до R=155 Мбит/с, сигналы QPSK, частотная полоса до ΔF=140.0 МГц, λ=0.03 м, вероятность ошибки на информационный бит равна Рб=10-7, требуемое значение сигнал/помеха  дБ (для помехоустойчивого низкоплотностного кода в сочетании с сигнальным созвездием 32APSK с максимальной спектральной эффективностью 4.45, используемого в спутниковой системе DVB-S2), мощность сигналов Рпер=2000 Вт.
дБ (для помехоустойчивого низкоплотностного кода в сочетании с сигнальным созвездием 32APSK с максимальной спектральной эффективностью 4.45, используемого в спутниковой системе DVB-S2), мощность сигналов Рпер=2000 Вт.
Оценочное значение сигнал/помеха  оценивается с использованием соотношения
оценивается с использованием соотношения

Для обеспечения требуемых вероятностных характеристик с энергетическим запасом для точки надира до 6 дБ (до 3 дБ для угла β=6.040) требуется приемная антенна с Gпр=400 (апертура D=0.15 0.19 м).
Повышение энергетического бюджета более чем в 3 раза (на 5 дБ) получается для данных параметров радиолинии КА, учитывая пересечение диаграмм направленности передающих антенн для более 3 КА.
Приложении 5.
5.1 Структура построения циклов передачи IP пакетов зондирующих сигналов представлена на фиг. П5.1.
Начало излучения первого IP пакета зондирующих сигналов в цикле строго привязано к секундной метке единой шкалы времени, поддерживаемой блоком спутниковой радионавигации системы ГЛОНАСС (GPS). Заголовок цикла содержит информацию о номере КА и его шкале времени, режиме излучения, формате и структуре данного цикла передачи. Каждый цикл содержит информационные IP пакеты, передаваемые на нисходящих радиолиниях ССПС и ВИИШП, размер и структура которых соответствует принятым для IP информационных сетей, в промежутках между ними излучаются пакеты САР РЛЗ, используемые при необходимости для синтезирования апертуры радиолокационного зондирования. Эти же пакеты САР РЛЗ излучаются при отсутствии трафика на нисходящих линиях мобильной связи («виртуальные абоненты»).
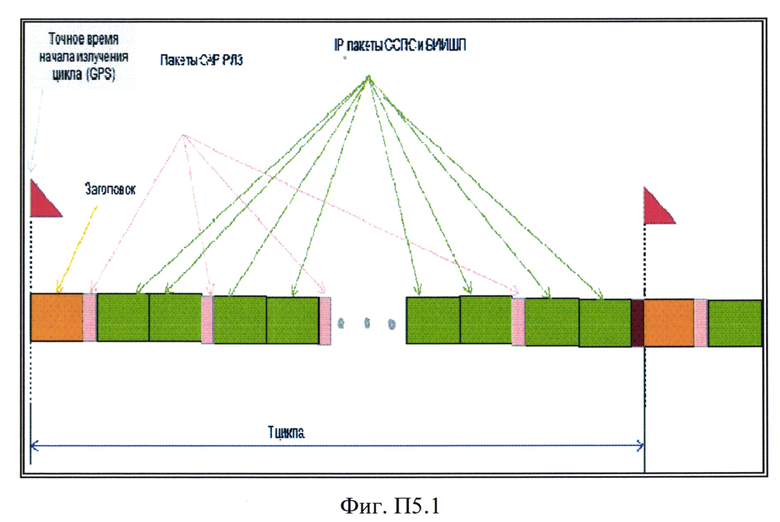
Длительность периода цикла Тцикла выбирается в зависимости от режима зондирования. В режиме с «широкой ДН» период может быть равномерным и составлять единицы-десятки секунд. В режиме «ДН с обужением» - определяется временем сканирования глобальной зоны видимости и может быть не равномерным, а выбираться в зависимости от объема трафика мобильной связи, передаваемого в «обуженную» зону.
В конце цикла блоком формирования передается «хвостовик» с контрольной суммой и дополнением бит до кратности секундной шкалы периода цикла Тцикла (времени КА).
5.2 Структура построения циклов IP пакетов принятых отраженных сигналов представлена на фиг. П5.2.
Начало излучения цикла жестко синхронизируется с помощью аппаратуры радионавигации и синхронизации от космических навигационных систем типа ГЛОНАСС и/или GPS, начало первого IP пакета в цикле соответствует секундной метки времени получения первого «несжатого» отсчета сигнала на выходе аналого-цифрового преобразователя (АЦП). Заголовок цикла содержит информацию о номере КА, бортовой шкале времени, структуре и формате построения цикла.
Каждый IP пакета имеет заголовок с информацией, соответствующей номеру данного цикла и его порядковому номеру в этом цикле. Это обеспечивает их последующую правильную сборку с восстановлением бортовой шкалы времени и обработку в наземных центрах приема и обработки радиолокационных изображений, не допускающую появление ложных радиолокационных объектов. Заголовки циклов и адреса IP пакетов отраженных сигналов имеют уникальные номера, позволяющие бортовым и наземным маршрутизаторам пропускать и доставлять на НПП их без потерь, используя технологию создания виртуальных путей в общих потоках IP пакетов различного сигнально- информационного назначения.
На выходных портах маршрутизатора к каналам МЛС или РПД все IP пакеты цикла приема отраженных сигналов и подвижной связи (ПС) идут чередуясь в общем потоке. Суммарная скорость передачи пакетов принимаемых отраженных сигналов и сигналов от абонентов ПС на МЛС и на нисходящих линиях ретрансляции в наземные центры превышает скорость формирования этих пакетов. При отсутствии ретранслируемых целевых пакетов на этих линиях передаются вставки служебных пакетов, обеспечивающих синхронизацию на линиях связи и исключаемых при обработке.
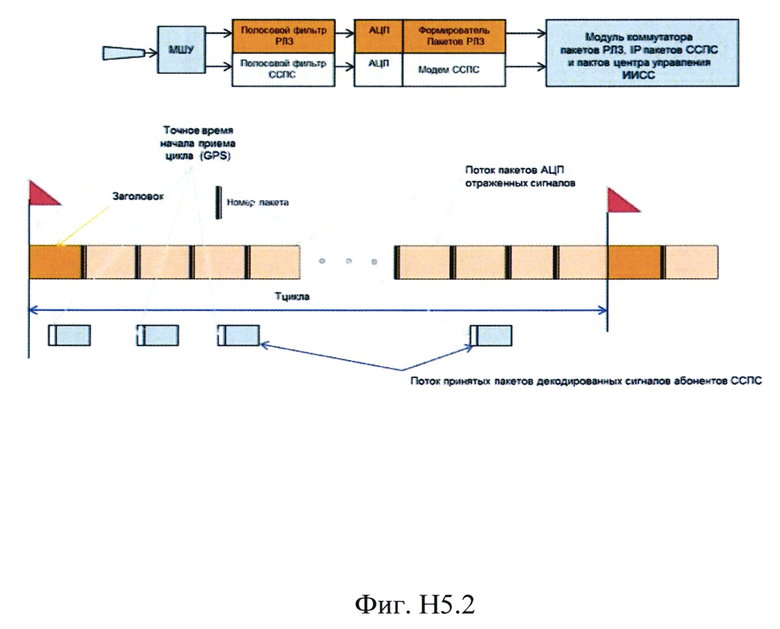
5.3 Возможные варианты использования диапазонов рабочих частот, в интересах реализации активно-пассивной многопозиционной радиолокации, организации функционирования ССПС и ВИИШП.
В соответствии с международным регламентом для космических средств радиолокационного зондирования на первичной основе выделены участки полос рабочих частот: в L диапазоне 1215÷1300 МГц (условно f0), и в X диапазоне два участка полос 8025÷8650 МГц (условно f1) и 9300÷9800 МГц (условно может быть f0 или f1) [Верба B.C., Неронский А.Б., Осипов И.Г., Турук В.Э. Радиолокационные системы землеобзора космического базирования. М.: Радиотехника, 2010, стр. 60-63].
Когнитивное использование частотного диапазона, выделенного для космических систем радиолокационного зондирования, с соответствующими мощностями излучения и направленными свойствами антенных систем открывает новые возможности для развития качества и реализуемых параметров мобильной связи. Вместе с тем, необходимость одновременного решения этими же сигналами двух задач без взаимных помех определяет ряд ограничений на режимы излучения и виды используемых сигналов по способам модуляции.
С учетом этих обстоятельств, мобильная связь в ИИСС предоставляется одновременно в двух диапазонах L и X, в каждом из которых также функционируют две подсистемы МС. Одна с широкополосным доступом в IP наземные сети (ВИИШП), которые не обеспечивают существующие спутниковые системы связи, и вторая со среднескоростным или низкоскоростным доступом, используемым для упрощения функционирования абонентского терминального оборудования в квазинепрерывном режиме (ССПС).
Предлагаемый к использованию в ИИСС частотный план каналов радиодоступа и радиолокационного зондирования для совместного функционирования и решения всех задач приведен на фиг. П5.3.
Для обеспечения функционирования МС абонентам без взаимных помех в смежных зонах обслуживания различными БРТА РПрд КА в X-диапазоне полоса частот 8025-8425 МГц может быть разбита на пять участков. Полосы А, В, С, D по 80 МГц обеспечивают традиционный для спутниковых систем связи четырехцветный частотный план повторного использования частот. В каждой из них может быть сформирован сигнал линии вниз для абонентских терминалов МС, используемый одновременно для радиолокационного зондирования. Участок полосы (7,9÷8,4 ГГц) в настоящее время широко используется военными системами спутниковой связи на линии «вверх», что не вызовет помех для приема абонентскими терминалами вне зон обслуживания территориальных сетей.
Участок полосы F может быть также разбит на четырехцветный полосный план по 20 МГц и использоваться для среднескоростного (386-4096 кбит/с) IP трафика из территориальных сетей на простые абонентские станции в зависимости от реализованной ЭИИМ в 30-60 градусном луче.
В полосе 8500-8650 МГц на КА организуется приемные каналы доступа в территориальные IP сети и приема данных от абонентских терминалов. Реализуемые частотные планы и скорости передачи (приема) в каналах доступа и передачи трафика и их распределение между зонами обслуживания будут уточнены при проектировании и принципиального значения для этой патентной заявки не имеют.
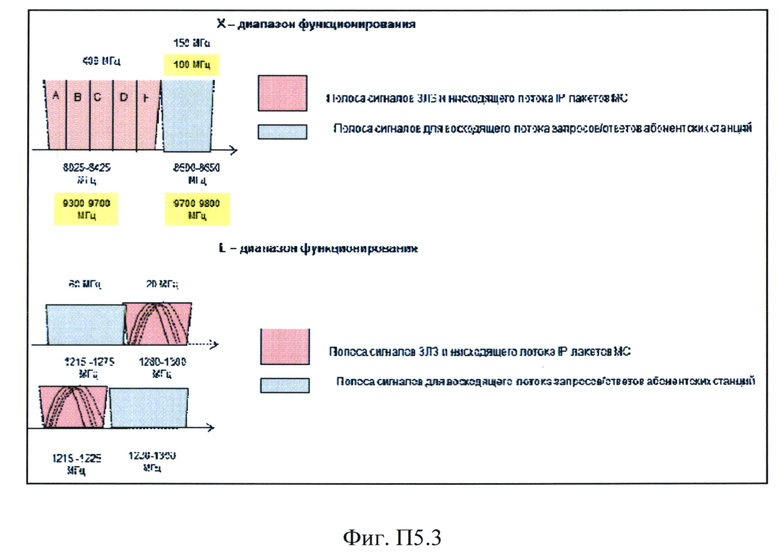
В выделенной для радиолокационного зондирования полосе 1215-1300 МГц L-диапазона реализовать подсистему МС можно только с учетом сложившегося его использования спутниковыми радионавигационными системами GPS, GALILEO, COMPAS, GZSS, IRNSS и ГЛОНАСС, частотные планы сигналов которых показаны на фиг. П5.4.
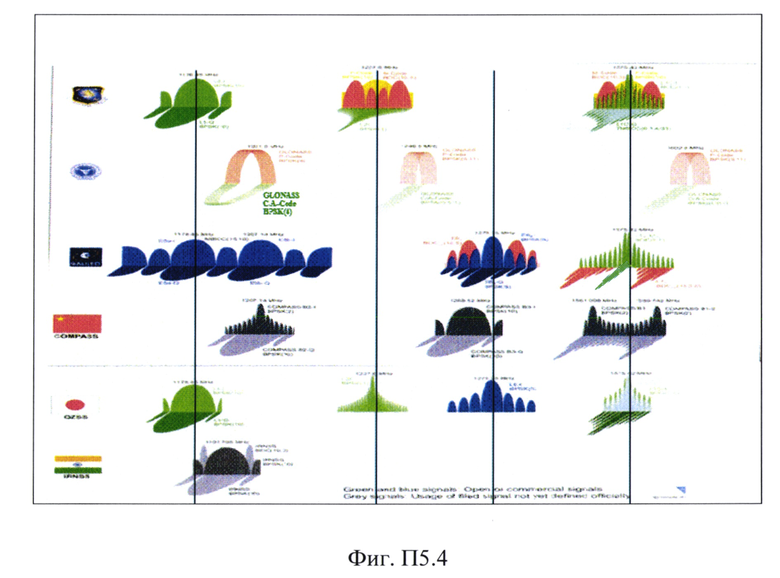
С учетом работы этих систем все действующие спутники радиолокационного зондирования, как правило, использовали сигналы в районе частоты 1275 МГц. Для спутниковой радионавигации КА ИИСС, соответственно, должны использоваться сигналы в полосах 1176 МГц (L1) и 1575 МГц (L5), а зондирующие сигналы радиолокационного мониторинга и МС в этом диапазоне могут излучаться на несущих в районе частоты 1225 МГц или 1285 МГц.
Для обеспечения достаточно высокой разрешающей способности радиолокационного мониторинга полоса сигнала может составлять около 20 МГц. Для обеспечения функционирования МС без взаимных помех абонентам, находящимся в смежных зонах обслуживания различными КА в L-диапазоне, могут быть использованы фазомодулированные сигналы с кодовым разделением, в том числе OFDM сигналы, используемые в наземных LTE сетях радиодоступа, несущие которых в соседних зонах обслуживания сдвинуты по частоте на 50-100 кГц, реализуя четырехцветный частотно-кодовый план повторного использования общей полосы частот.
Запросные каналы доступа и каналы передачи данных от абонентских терминалов могут быть реализованы в различных участках полосы 1215-1255 МГц, при этом номинальные значения этих частот и/или кодовое разделение сигналов абонентских станций также могут быть различными в смежных зонах обслуживания и закреплены за соответствующими наземными центрами для упрощения организации доступа абонентов. Назначение номиналов частот этих каналов ведется с центра управления ИИСС и изменяется на борту КА по программе и/или под воздействием ОАМ пакета управления от наземного центра приема, в зону ответственности которого вошел данный КА.
Приложение 6. Оценка мощности интерференционных межканальных помех за счет уплотнения принятых отраженных зондирующих сигналов на спутниковом и наземном сегментах ИИСС
В результате разделения принятых отраженных зондирующих сигналов sj (t) с кодовым уплотнением на НПП формируются сигналы

Здесь gi (t) - сигнал с генератора псевдослучайной последовательности, соответствующего сигналу si (t) с выхода i-го АЭ антенной решетки; K - количество АЭ в антенной решетке.
Результирующий сигнал с узкой ДН формируется путем когерентного суммирования фазированных сигналов  - мощность сигнальной составляющей Рс равна Рс=K2wc, мощность интерференционных межканальных помех Pu равна Pu≈2K2wc.
- мощность сигнальной составляющей Рс равна Рс=K2wc, мощность интерференционных межканальных помех Pu равна Pu≈2K2wc.
Отношение сигнал/помеха определяется соотношением

Здесь Ес - энергия сигналов на времени анализа Т; Nu - спектральная плотность интерференционных межканальных помех; ΔF - частотная полоса сигналов.
Для примерных параметров ΔF=10 МГц, T=0.1 с оценка рассматриваемого отношения сигнал/помеха равна  (57 дБ), что значительно выше сигнал/помеха (≈20), требуемого для решения радиолокационных задач некогерентного обнаружения и сопровождения с вероятностными характеристиками некогерентного обнаружения и ложной тревоги Рл.тр, заданными в Приложении 1.
(57 дБ), что значительно выше сигнал/помеха (≈20), требуемого для решения радиолокационных задач некогерентного обнаружения и сопровождения с вероятностными характеристиками некогерентного обнаружения и ложной тревоги Рл.тр, заданными в Приложении 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ ПРИ ПОМОЩИ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2004 |
|
RU2278398C2 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| СПОСОБ ФРОНТАЛЬНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ АНТЕННЫ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСКЛЮЧЕНИЕМ СЛЕПЫХ ЗОН В ПЕРЕДНЕЙ ЗОНЕ С ПОМОЩЬЮ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2560082C2 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2719535C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2023 |
|
RU2806651C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2022 |
|
RU2801361C1 |
| Устройство адаптивной маршрутизации IP-пакетов на борту космического аппарата в спутниковых сетях связи | 2023 |
|
RU2823151C1 |
| Устройство обеспечения посадки летательного аппарата | 2020 |
|
RU2757804C1 |
| КОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЗА ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2284550C2 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
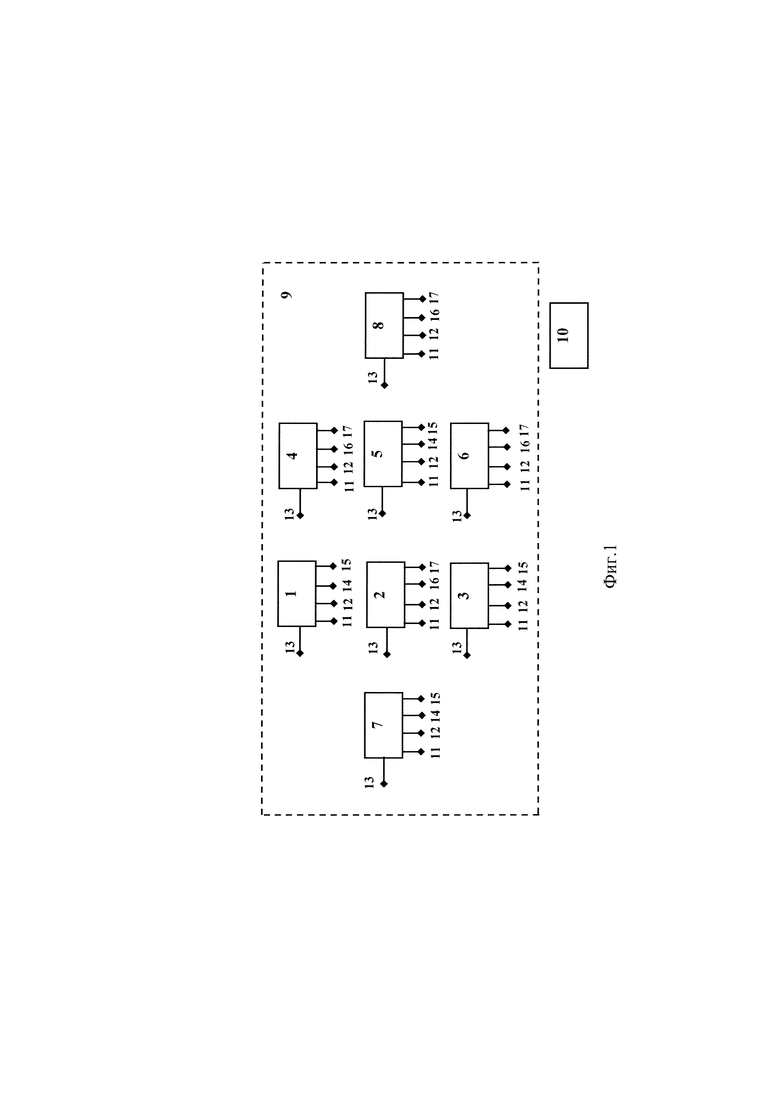

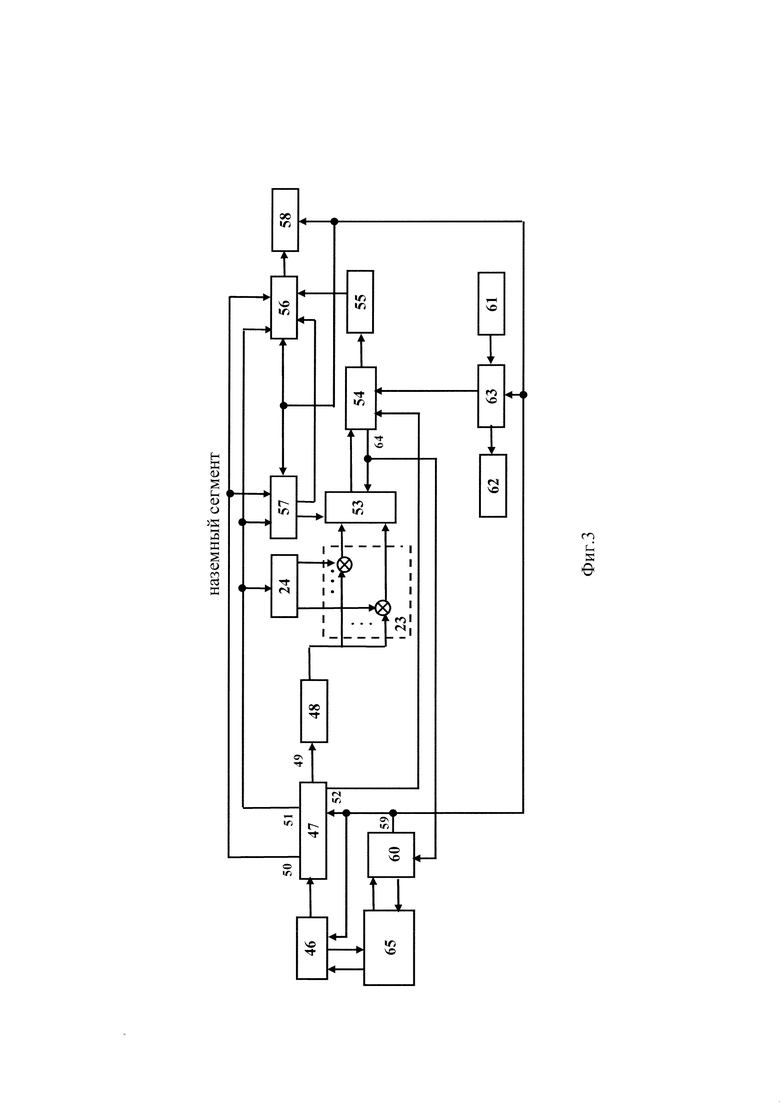
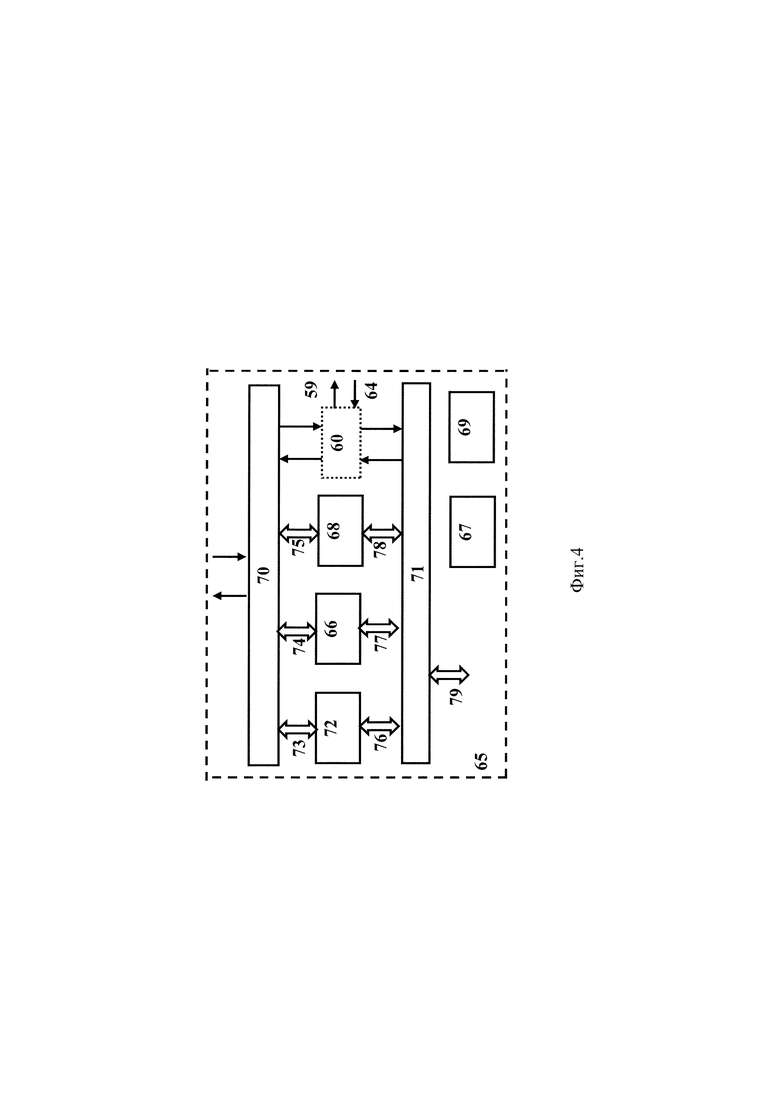
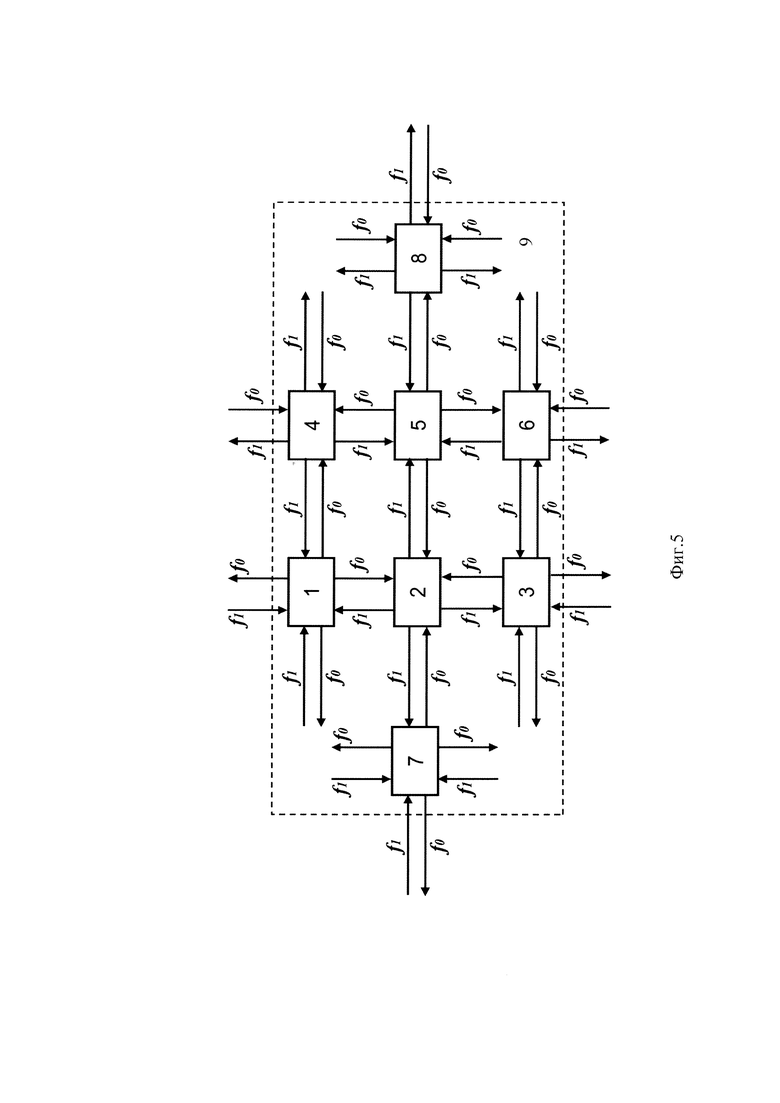
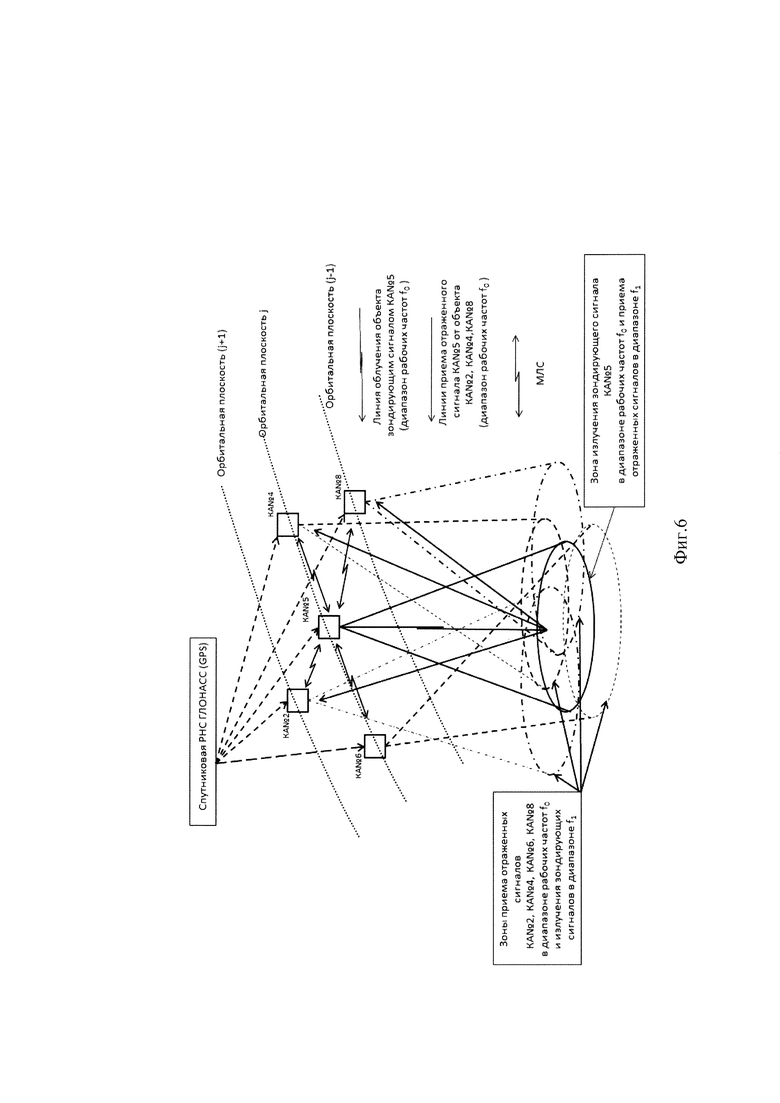
Изобретение относится к области радиотехники, в частности к интегрированной информационной спутниковой системе. Техническим результатом является обеспечение глобального непрерывного трехмерного радиолокационного наблюдения земной поверхности и околоземного пространства с возможностями анализа событий, селекции подвижных объектов и оценки параметров их движения в реальном времени и обеспечение глобальной спутниковой системы персональной связи, видеовещания и интерактивных услуг широкополосного доступа в Интернет. Указанный технический результат достигается тем, что используется низкоорбитальная группировка чередующихся космических аппаратов (КА)-ретрансляторов, в которой первая группа КА передает сигналы системы персональной связи, видеовещания и интерактивных услуг в L-диапазоне, а вторая группа КА передает сигналы в Х-диапазоне, выделенных для радиолокационного зондирования. Прием отраженных зондирующих сигналов в восходящих линиях мобильной связи КА первой группы осуществляют в Х-диапазоне, а КА второй группы - в L-диапазоне. Передача информации осуществляется по межспутниковым линиям связи и радиолиниям передачи данных на наземные приемные пункты, где формируются разноракурсные радиолокационные изображения, их некогерентное накопление и тематическая обработка. 2 н. и 1 з.п. ф-лы, 6 ил.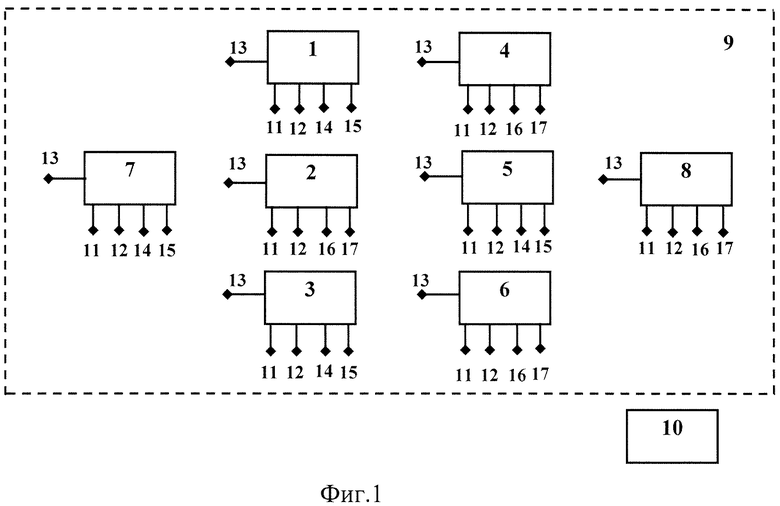
1. Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства, где облучают земную поверхность и околоземное пространство зондирующими сигналами спутникового сегмента, осуществляют прием отраженных зондирующих сигналов, выделяют зондирующие сигналы, отраженные зондирующие сигналы, эфемеридную информацию и информацию о бортовом времени космических аппаратов, выполняют взаимно-корреляционную обработку отраженных сигналов и зондирующих сигналов, формируют независимые разноракурсные радиолокационные изображения наблюдаемого участка земной поверхности и околоземного пространства, отличающийся тем, что зондирующие сигналы представляют собой синхронизированные по сигналам спутниковых радионавигационных систем циклы пакетов сигналов персональной связи, видеовещания, интерактивных услуг, включая доступ в Интернет и широкополосных приложений, прием отраженных сигналов осуществляют с трех и более разнесенных в пространстве направлений приемными элементами с широкой диаграммой направленности, которые формируют циклы пакетов принятых отраженных зондирующих сигналов, синхронизированных по сигналам спутниковых радионавигационных систем, а на наземном сегменте осуществляют прием, форматирование и хранение сигнально-информационных потоков, из которых выделяют зондирующие сигналы, принятые отраженные зондирующие сигналы, эфемеридную информацию и информацию о бортовом времени спутникового сегмента, формируют отраженные сигналы с узкой диаграммой направленности с использованием технологии фазирования сигналов для каждого направления приема отраженных сигналов, которые направлены в общую зону радиолокационного наблюдения, формируют независимые разноракурсные радиолокационные изображения наблюдаемого участка земной поверхности и околоземного пространства путем взаимно-корреляционной обработки сформированных отраженных сигналов с узкой диаграммой направленности и зондирующих сигналов, выполняют привязку сформированных радиолокационных изображений к карте, осуществляют некогерентное накопление радиолокационных изображений, осуществляют тематическую обработку радиолокационных изображений, выделяют подвижные объекты и оценивают их кинематические характеристики.
2. Способ по п. 1, отличающийся тем, что хранение сигналов на наземном сегменте, передаваемых по радиолиниям передачи данных (РПД), происходит путем архивирования с целью их последующего воспроизведения, получения радиолокационных изображений и маршрутов движения подвижных объектов для анализа ситуационных событий, произошедших в прошлом.
3. Устройство, реализующее способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства, содержащее спутниковый сегмент среднеорбитальных космических аппаратов передающих позиций Глобальной Навигационной Спутниковой Системы, борт приемной позиции в составе антенны приемника отраженных сигналов, устройства для фазирования отраженных сигналов, выделения эфемеридной информации и бортового времени, устройства синтезирования разноракурсных радиолокационных изображений, отличающееся тем, что введен наземный сегмент, а спутниковый сегмент содержит орбитальную группировку взаимосвязанных межспутниковыми линиями связи низкоорбитальных космических аппаратов-ретрансляторов двух типов, чередующих друг друга во всех орбитальных плоскостях, каждый из которых работает в двух не пересекающихся диапазонах рабочих частот на передачу и прием для спутниковой системы персональной связи, видеовещания, интерактивных услуг, включая доступ в Интернет, и широкополосных приложений, каждый космический аппарат содержит передающую многолучевую антенну зондирующих сигналов, соединенную с блоком передающего устройства зондирующих сигналов, информационный вход блока передающего устройства соединен с выходом блока формирования циклов IP пакетов зондирующих сигналов, управляющий вход блока формирования циклов IP пакетов принятых отраженных зондирующих сигналов, управляющий вход блока формирования циклов IP пакетов зондирующих сигналов и управляющий вход блоков передающего устройства соединены соответственно с первым вторым и третьим выходом блока управления и программирования режимов функционирования бортового специального комплекса космического аппарата, информационные вход/выход которого соединены с портами вывода/ввода сигнально-информационных потоков управления, программирования и телеметрического контроля бортового маршрутизатора IP пакетов, информационный вход и выход блока формирования циклов IP пакетов зондирующих сигналов подключены соответственно к порту вывода IP пакетов сигнально-информационных потоков нисходящих линий системы спутниковой персональной связи и видеовещания, интерактивных услуг и широкополосных приложений и к порту ввода IP пакетов излученных зондирующих сигналов бортового маршрутизатора, синхронизирующие входы блока формирования циклов IP пакетов зондирующих сигналов, блока формирования циклов IP пакетов принятых отраженных зондирующих сигналов, генератора псевдослучайных последовательностей с К выходами и блока приема, декодирования и контроля частотных каналов на восходящих линиях системы спутниковой персональной связи подключены к выходу синхронизатора блока спутниковой радионавигации, вход которого подключен к антенне спутниковой системы радионавигации, а информационный выход блока подключен к порту бортового маршрутизатора вывода IP пакетов эфемеридной информации и информации о бортовом времени космического аппарата, к соответствующему порту ввода IP пакетов сигнально-информационных потоков подключен выход блока формирования циклов IP пакетов принятых отраженных зондирующих сигналов, информационный вход которого подключен к выходу блока компрессии данных аналого-цифрового преобразования принятых отраженных сигналов, вход которого подключен к выходу сумматора сигналов с К входами, соединенного с группой выходов блока из К умножителей, первая группа К входов которого подключена к группе К выходов блоков приемных устройств отраженных зондирующих сигналов, а вторая группа К входов блока из К умножителей подключена к группе К выходов генератора псевдослучайных последовательностей, группа К входов блоков приемных устройств отраженных зондирующих сигналов подключена к выходам К активных элементов приемной антенной решетки, соответствующие порты входа/выхода бортового маршрутизатора подключены к соответствующим выходам/входам четырехканального блока межспутниковых линий связи и к выходам/входам n-канального приемо-передающего блока радиолиний связи с наземными приемными пунктами, выходы/входы которого подключены к приемо-передающим входам/выходам антенн на радиолиниях связи с наземными пунктами, входы/выходы блока межспутниковых линий связи подключены к четырем приемо-передающим антеннам межспутниковых линий связи, два соответствующих порта бортового маршрутизатора подключены к входным/выходным портам блока управления функционированием системы спутниковой персональной связи, вход которого подключен к блоку приема, декодирования и контроля частотных каналов на восходящих линиях системы спутниковой персональной связи, антенный вход блока соединен с соответствующим выходом блока формирования и управления диаграмм направленности антенных решеток спутниковой связи, два других соответствующих порта бортового маршрутизатора подключены к входным/выходным портам блока управления функционированием системы видеовещания, интерактивных услуг и широкополосных приложений, вход которого подключен к выходу блока приема, декодирования и контроля частотных каналов на восходящий линиях системы видеовещания, интерактивных услуг и широкополосных приложений, антенный вход которого подключен к соответствующему выходу блока формирования и управления диаграмм направленности антенных решеток на восходящих радиолиниях системы видеовещания, интерактивных услуг и широкополосных приложений, управляющий выход блока управления функционированием системы спутниковой персональной связи и управляющий выход блока управления функционированием системы видеовещания, интерактивных услуг и широкополосных приложений подключены к соответствующим управляющим входам блока формирования и управления диаграмм направленности антенных решеток спутниковой связи, на вход которого поступают развязанные выходы К антенных элементов с блока приемных устройств отраженных зондирующих сигналов, наземный приемный пункт в составе наземного сегмента содержит комплекс средств системы спутниковой персональной связи и видеовещания, интерактивных услуг и широкополосных приложений и инфотелекоммуникационных транспортных сетей, который входами/выходами подключен к блоку комплекса приемно-передающих станций форматирования, архивирования и хранения сигнально-информационных потоков, который подключен к входу блока выбора массивов текущей обработки, первый выход блока выбора массива принятых отраженных сигналов подключен к входу блока декомпрессии, его выход подключен к группе входов блока К умножителей, вторые К входы которого подключены к генератору псевдослучайных последовательностей с К выходами, а группа К выходов блока подключена к группе входов блока формирования отраженных сигналов с узкой диаграммой направленности, выход которого подключен к блоку формирования разноракурсных радиолокационных изображений, второй вход которого соединен с выходом блока выбора массива зондирующих сигналов космических аппаратов, а третий вход этого блока соединен с выходом блока формирования и архивации массива контрольно-юстировочных сигналов, вход которого соединен с блоком спутниковой радионавигации, формирования опорных частот и сигналов синхронизации, а второй выход подключен к передающему комплексу контрольно-юстировочных станций, третий выход блока выбора массива данных о бортовом времени космического аппарата соединен с входом синхронизации генератора псевдослучайных последовательностей, первым входом блока задания пространственных координат и первым входом блока привязки к карте, четвертый выход блока выбора массива данных эфемеридной информации соединен со вторыми входами блока задания пространственных координат и блока привязке к карте, первый выход блока задания пространственных координат соединен с информационным входом блока формирования отраженных сигналов с узкой диаграммой направленности, второй выход блока задания пространственных координат соединен с третьим информационным входом блока привязки к карте, первый выход блока формирования разноракурсных радиолокационных изображений соединен с входом блока некогерентных накоплений радиолокационных изображений, выход которого подключен к четвертому входу блока привязки к карте, информационный выход которого подключен к входу блока тематической обработки радиолокационных изображений, информационный выход данных калибровки блока формирования разноракурсных радиолокационных изображений соединен с входом блока формирования отраженных сигналов с узкой диаграммой направленности и с входом данных калибровки комплекса управления функционированием интегрированной информационной спутниковой системы в составе наземного пункта приема, порты вход/выход блока комплекса управления функционированием интегрированной информационной спутниковой системы в составе наземного приемного пункта соединены с комплексом средств системы спутниковой персональной связи и видеовещания, интерактивных услуг и широкополосных приложений, инфотелекоммуникационных транспортных сетей, а управляющий выход комплекса управления функционированием интегрированной информационной спутниковой системы в составе наземного приемного пункта соединен с управляющими входами комплекса приемно-передающих станций форматирования, архивирования и хранения сигнально-информационных потоков, блока выбора массивов текущей обработки, блока формирования и архивации массива контрольно-юстировочных сигналов, блока задания пространственных координат, блока привязки к карте и блока тематической обработки радиолокационных изображений.
| РАДИОКОМПЛЕКС ДЛЯ СИСТЕМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ, УСТАНАВЛИВАЕМЫХ НА КОСМИЧЕСКИЕ АППАРАТЫ | 2016 |
|
RU2604355C1 |
| Льнотеребильная машина | 1931 |
|
SU30879A1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ ПРИ ПОМОЩИ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2004 |
|
RU2278398C2 |
| US 2015204974 A1, 2015-07-23 | |||
| CN 103501424 A, 2014-01-08 | |||
| Верба В.С | |||
| и др., Радиолокационные системы землеобзора космического базирования, Москва, Радиотехника, 2010 | |||
| Кашкин В.Б., Сухинин А.И., Дистанционное зондирование Земли из космоса | |||
| Цифровая обработка изображений, Логос, Москва, 2001. | |||

