ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к области компьютерной техники, в частности к области автоматизированной обработки данных для обеспечения зоны покрытия радиосвязи на маршрутах следования инкассаторских транспортных средств с помощью беспилотных летательных аппаратов (БПЛА) с установленными ретрансляторами.
УРОВЕНЬ ТЕХНИКИ
[0002] Для инкассаторского обслуживания клиентов, используются инкассаторские транспортные средства (ИТС), которые передвигаясь по определенным маршрутам осуществляют обслуживание клиентов, расположенных в различных точках заданной территории. Существующей проблемой является тот факт, что при заданных инфраструктурных условиях (застройка территории, наличие помех и т.п.) на маршрутах перемещения ИТС возникают области, в которых отсутствует покрытие радиосигналом, в частности, сотовой связи, что может привести к потере оперативного контроля за перемещением ИТС.
[0003] Для обеспечения области покрытия радиосигналом на маршрутах перемещения ИТС можно использовать БПЛА, оборудованные ретрансляторами радиосигнала, которые смогут нивелировать отсутствие или слабый сигнал в требуемых точках. Пример подхода в части применения БПЛА раскрыт в патентной заявке US 20180293897 Al (Т Mobile USA Inc, 11.10.2018). В известном решении предлагается на основании расчета зоны покрытия радиосигнала формировать точки передачи сигнала на БПЛА в алгоритмически определяемых точках.
[0004] Недостатком данного подхода является тот факт, что он основывается в основном на данных мощности распределения сигнала в зоне покрытия, и не учитывает особенности инфраструктурных параметров для выявления точек с недостаточным уровнем сигнала и размещения там БПЛА для улучшения зоны покрытия. Также, данный подход не применяется для обеспечения связи при перемещении автомобилей инкассаторов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Технической проблемой, на решение которой направлено заявленное изобретение, является применение БПЛА в местах прохождения маршрутов ИТС для обеспечения зоны покрытия радиосигналом.
[0006] Техническим результатом является обеспечение зоны покрытия радиосигналом на маршрутах следования ИТС.
[0007] Другим техническим результатом является повышение эффективности определения точек для размещения в них ретрансляторов радиосигнала для обеспечения зоны покрытия на маршрутах следования ИТС.
[0008] В предпочтительном варианте осуществления заявлено способ обеспечения зоны покрытия радиосвязи на маршрутах следования инкассаторских транспортных средств (ИТС), выполняемый с помощью по меньшей мере одного вычислительного устройства и содержащий этапы, на которых:
осуществляют сбор данных о зоне покрытия радиосигналом местности, включая по меньшей мере сведения об установленных базовых станциях (БС), а также плотности застройки и высоты рельефа;
выполняют обучение модели машинного обучения на основании собранных данных о зоне покрытия местности, в ходе которого тренируют модель на определение точек на местности для размещения ретрансляторов радиосигнала;
получают данные маршрута перемещения по меньшей мере одного ИТС;
определяют по меньшей мере одну целевую точку на местности по маршруту следования ИТС, в которой уровень радиосигнала отсутствует или ниже заданного порогового значения;
определяют с помощью упомянутой модели машинного обучения точку на местности для размещения ретранслятора радиосигнала, обеспечивающего зону покрытия радиосигналом, охватывающую упомянутую целевую точку;
формируют полетное задание для беспилотного летательного аппарата (БПЛА) с установленным ретранслятором радиосигнала, содержащее по меньшей мере маршрут перемещения БПЛА и координаты точки размещения ретранслятора, определенной с помощью модели машинного обучения;
направляют БПЛА в точку размещения ретранслятора.
[0009] В одном из частных примеров реализации способа дополнительно получают данные помех на радиочастотах в зоне покрытия.
[0010] В другом частном примере реализации способа рассчитывается время прибытия ИТС в целевую точку.
[0011] В другом частном примере реализации способа полетное задание дополнительно включает время прибытия ИТС в целевую точку.
[0012] В другом частном примере реализации способа полетное задание передается БПЛА, обеспечивающему прибытие в точку размещения ретранслятора ко времени прибытия ИТС.
[0013] В другом частном примере реализации способа при формировании полетного задания определяется близость к установленным в данной области БС.
[0014] В другом частном примере реализации способа БПЛА связывается по беспроводной связи с БС в зоне нахождения точки размещения ретранслятора.
[0015] В другом частном примере реализации способа БПЛА осуществляет связь через атмосферную оптическую линию связи.
[0016] В другом частном примере реализации способа ретранслятор на БПЛА содержит поворотную антенну.
[0017] В предпочтительном примере реализации также заявлена система обеспечения зоны покрытия радиосвязи на маршрутах следования инкассаторских транспортных средств (ИТС), содержащая:
вычислительное устройство, выполненное с возможностью
осуществлять сбор данных о зоне покрытия радиосигналом местности, включая по меньшей мере сведения об установленных базовых станциях (БС), а также плотности застройки и высоты рельефа;
выполнять обучение модели машинного обучения на основании собранных данных о зоне покрытия местности, в ходе которого тренируют модель на определение точек на местности для размещения ретрансляторов радиосигнала;
получения данных маршрута перемещения по меньшей мере одного ИТС;
определения по меньшей мере одной целевой точки на местности по маршруту следования ИТС, в которой уровень радиосигнала отсутствует или ниже заданного порогового значения;
определения с помощью упомянутой модели машинного обучения определение точки на местности для размещения ретранслятора радиосигнала, обеспечивающего зону покрытия радиосигналом, охватывающую упомянутую целевую точку;
формирования полетного задания для БПЛА с установленным ретранслятором радиосигнала, при этом полетное задание содержит по меньшей мере маршрут перемещения БПЛА и координаты точки размещения ретранслятора, определенной с помощью модели машинного обучения;
передачи полетного задания на БПЛА;
БПЛА, выполненный с возможностью получения полетного задания от вычислительного устройства, и перемещения в указанную точку размещения ретранслятора.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Фиг. 1 иллюстрирует общую схему заявленного решения.
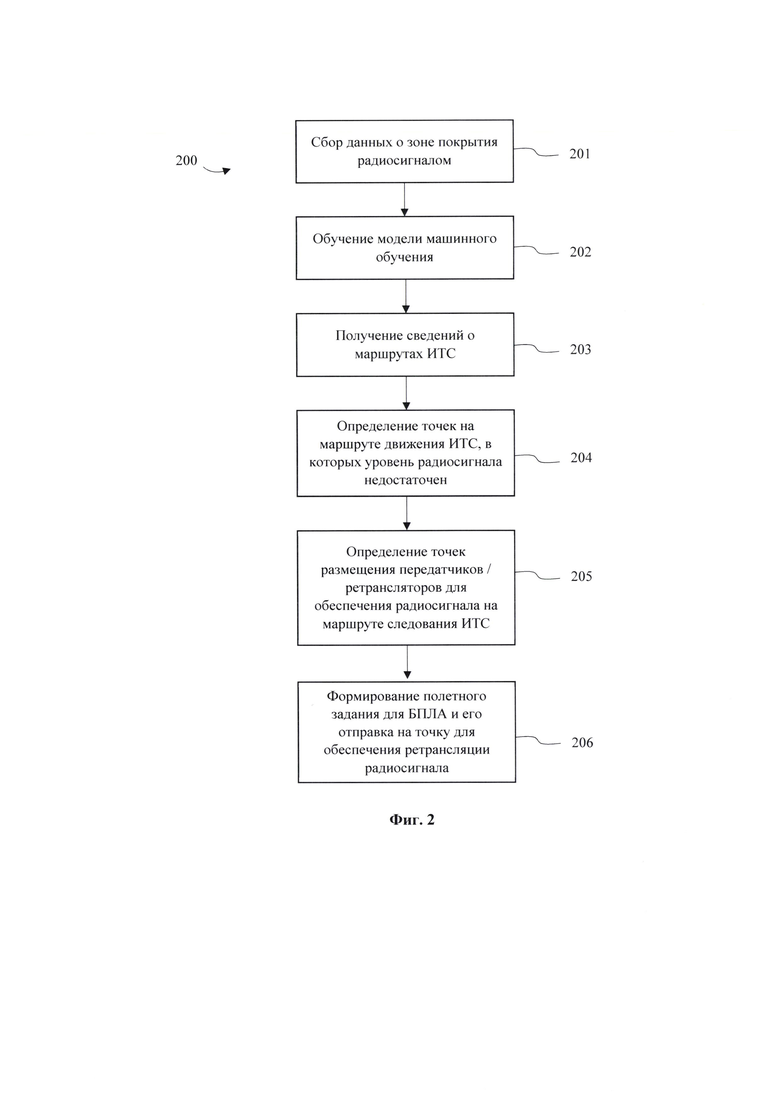
[0019] Фиг. 2 иллюстрирует блок-схему выполнения способа.
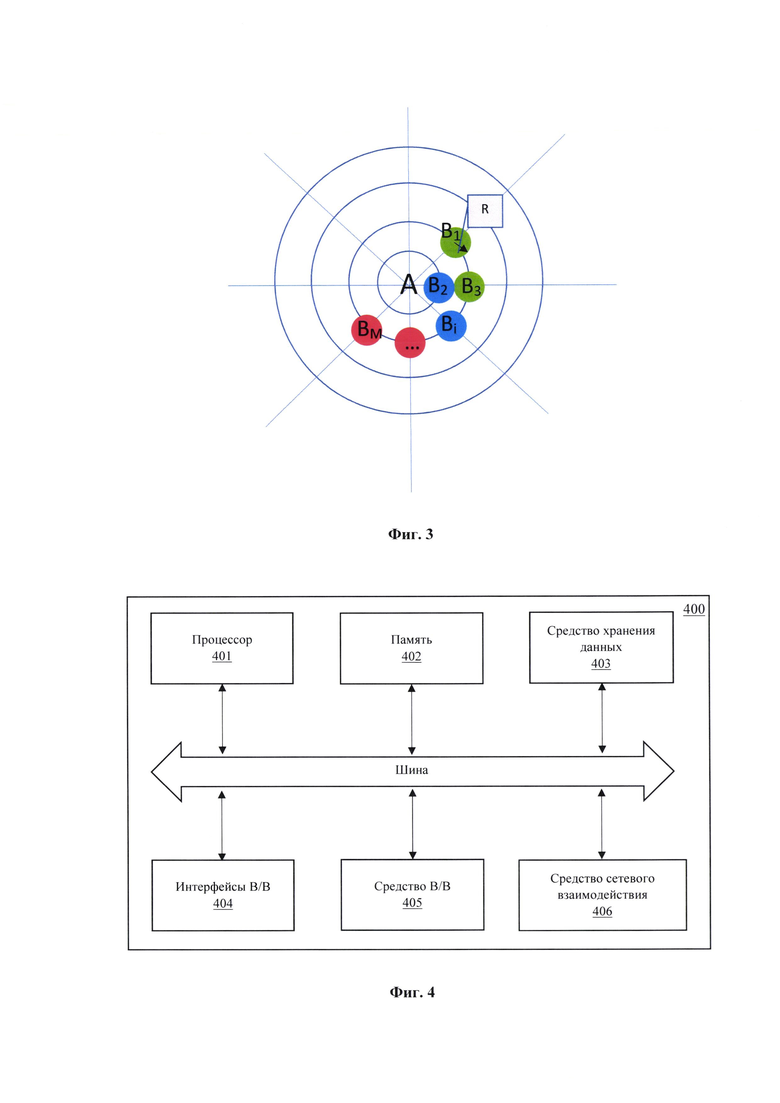
[0020] Фиг. 3 иллюстрирует пример расчета мощности сигналов базовых станций.
[0021] Фиг. 4 иллюстрирует общий вид вычислительного устройства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
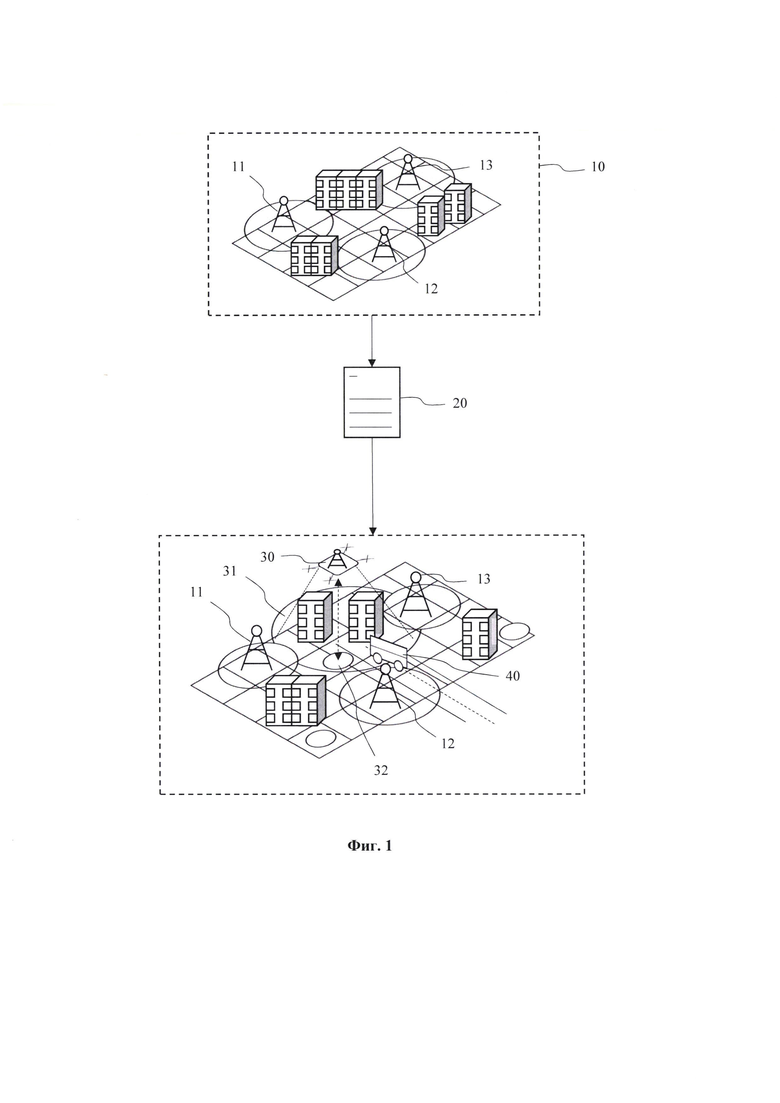
[0022] На Фиг. 1 представлен общий принцип реализации заявленного решения. Для решения многих технических и прикладных задач требуется оптимизация передающей инфраструктуры (т.е. подбор/изменение конфигурации/расположения передатчиков и антенн, пр.) для эффективного достижения целевых показателей. Такими показателями обычно является покрытие сигналом заданной территории при определенных условиях (рельеф местности, наличие зданий и сооружений, топологии транспортной сети и пр.). Однако целевыми показателями помимо покрытия могут также быть другие характеристики - например, емкость или максимальна пропускная способность сети на заданной территории и т.п. Технически, задача формулируется в следующем виде - при заданных условиях с учетом ограничений выбрать конфигурацию передатчиков (ретрансляторов), которая наиболее эффективно обеспечивает достижение целевых показателей. Такие задачи возникают как при создании передающей инфраструктуры (для расчета/проектирования начальной конфигурации), так и в процессе эксплуатации в связи с изменениями условий и/или требований покрытия сигналом.
[0023] Как показано на Фиг. 1 информация (10) о зоне покрытия радиосигналом местности включает в себя такие данные, как: сведения об установленных базовых станциях (БС) (11-13), плотность застройки и высоту рельефа. Дополнительно может учитываться тип БС, мощность, установленное на БС оборудование, направленность антенны БС и т.п. На основании данных параметров можно определить область покрытия БС (11-13) сигналом.
[0024] Получаемая информация (10) используется на выбранном вычислительном устройстве (20), например, ПК или сервере, для обучения модели машинного обучения (ML-модели). ML-Модель обеспечивает оценку целевых показателей (качества покрытия и т.п.) по заданному варианту конфигурации (точкам расположения передатчиков, типам передатчиков и т.п.), а также позволяет определить оптимальные точки для формирования устойчивого покрытия радиосигналом (реализация алгоритма поиска оптимального покрытия из заданных вариантов).
[0025] Пример входных данных ML-модели:
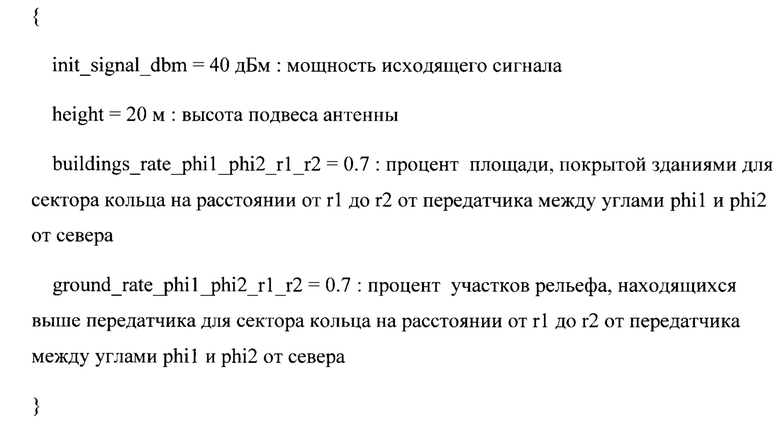
Параметры phi1, phi2, r1, г2, как правило, настраиваются системой.
[0026] Для повышения точности и скорости реализации предложенного способа могут использоваться различные эвристики и/или встроенные механизмы до-обучения ML-модели и оптимизационного модуля. Например, могут использоваться следующие эвристики при выборе вариантов конфигурации для исключения конфигураций с точками размещения передатчиков, которые:
- расположенными слишком близко между собой, и при этом между этими точками нет препятствий (гора, застройка). Порог расстояния, начиная с которого исключаются точки рассчитывается на основании эвристики.
- попали в топ при ранжировании, но имеют слишком маленькое покрытие в рамках задачи. Порог покрытия, начиная с которого исключаются точки рассчитывается на основании эвристики.
[0027] Итогом работы ML-модели является определение точки (32) для направления в нее БПЛА (30) с установленным ретранслятором, в которой необходимо организовать зону покрытия (31) радиосигнала для находящегося в этой точке ИТС (40).
[0028] Рассмотрим более детально способ (200) обеспечения зоны покрытия радиосигналом. На первом этапе (201) выполняется сбор данных (10) о зоне покрытия радиосигналом местности включает в себя такие данные, как: сведения об установленных БС (11-13), плотность застройки и высоту рельефа. Дополнительно может учитываться тип БС, мощность, установленное на БС оборудование, направленность, данные помех на радиочастотах в зоне покрытия и т.п.
[0029] Далее на этапе (202) выполняется обучение ML-модели на основании данных, полученных на этапе (201). Как представлено на Фиг. 3 для расчета уровня сигнала в точке Bi, при расположении передатчика в точке А и с заранее заданными условиями (высота окружающих зданий, рельеф местности и т.п.) используется одна из известных физико-математических моделей (далее - ФМ-модель) расчета распространения радио сигнала. Для расчета уровня сигнала во всей целевой зоне покрытия используется радиальная сетка с началом координат в точке установки передатчика. В каждом i-ом узле сетки Bi рассчитывается уровень сигнала при этом считается что сигнал вокруг узла Bi в радиусе R считается равным сигналу в узле Bi. Сигнал вокруг узла в радиусе R такой же как в самом узле.
[0030] Поскольку расчеты ФМ-модели даже для одного передатчика (ретранслятора) занимают много времени и вычислительных ресурсов, можно использовать предобученную ML-модель для апроксимации оценки целевых показателей при заданных конфигурациях.
[0031] Обучение ML-модели происходит на синтетических данных, полученных путем расчета целевых показателей (покрытия) при различных расположениях передатчика: Ci=f(propsi, li),
где Ci - покрытие, propsi - условия соответствующей точки расположения передатчика, и l× - координаты расположения передатчика (см. определения и порядок расчетов далее).
[0032] Расчет признаков (характеристик местности propsi) Признаки, подающиеся на вход ML-модели - статистики местности: количество участков ландшафта, которые выше исследуемой точки расположения передатчика (с координатами li) в 1-ой (2, 3, 4) координатной четверти в радиусе от r1 до r2 относительно исследуемой точки, количество зданий на единицу площади в этих зонах. Здесь r1, r2 могут пробегать разные значения (настраиваемые параметры).
[0033] Расчет таргета (целевой переменной)
Целевая переменная ML-модели рассчитывается как отношение площади покрытой территории (при расположении передатчика в точке с координатами li исходя из расчетов ФМ-модели) к площади максимально возможной при заданных параметрах - каким было бы покрытие из этой точки, если нет препятствий на пути распространения сигнала. Синтез данных для обучения ML-модели осуществляется путем моделирования установки передатчика (ретранслятора) в заданную точку и расчетом зоны покрытия в радиальной сетке на основе соответствующей ФМ-модели распространения радиосигнала.
[0034] Способ поиска оптимального покрытия
На вход ML-модели поступают:
- Точки Ai с координатами li, которые необходимо проранжировать (которые можно использовать для установки передатчика);
- Точки/области Bi, которые необходимо покрыть сигналом;
- Условия propsi (рельеф, застройка, растительность) для расположения точек передатчиков Ai.
[0035] На этапе (203) собирается информация о маршрутах следования ИТС, на которых определяются зоны и точки (этап 204), в которых уровень радиосигнала отсутствует или достаточно слабый, т.е. ниже установленного порогового значения, и не позволяет осуществить требуемый уровень связи с ИТС. Такого рода зона, как правило, очерчена географическими координатами, что позволяет с помощью ML-модели на этапе (205) определить точки для последующего ранжирования в части выбора оптимальной точки для размещения ретранслятора на БПЛА (30). Для лучших точек расположения ретрансляторов рассчитываются зоны покрытия (31) с помощью вышеуказанной ML-модели, выполняющей расчет качества покрытия из возможных точек размещения БПЛА.
[0036] При определении точки (32) для направления в него БПЛА (30) учитывается также близость БС (11-13), что необходимо для обеспечения связи между БС и ретранслятором БПЛА (30) для обеспечения требуемой мощности сигнала и формирования зоны покрытия (31) радиосигналом. Связь БПЛА (30) и БС может быть организована по беспроводному каналу передачи данных, например, с помощью атмосферной оптической линии связи (FSO - free-space optics).
[0037] Дополнительно может выполняться расчет времени прилета БПЛА (30) в определенную точку (32) для размещения ретранслятора, которое может быть рассчитано на основании скорости движения ИТС (40), времени его предполагаемого прибытия в зону с отсутствующим или слабым радиосигналом, дорожного трафика и другой информации.
[0038] На этапе (206) выполняется формирование полетного задания для БПЛА (30), которое передается ему по выбранному каналу передачи данных. Полетное задание содержит географические координаты точки (32) назначения, в которой необходимо расположить БПЛА (30) с ретранслятором, маршрут перемещения БПЛА, включая высоту полета и траекторию перемещения. Дополнительно может выполняться регулировка скорости перемещения БПЛА (30) в зависимости от времени необходимо прибытия в точку (32).
[0039] Также, может применяться несколько БПЛА, каждый из которых может находиться в заданной точке для обеспечения зоны покрытия радиосигналом. При этом, БПЛА могут сменять друг друга на одной точке, исходя их уровня заряда аккумулятора. В этом случае происходит формирование дублирующего полетного задания с установленным временным шагом, необходимым для возвращения первого БПЛА, находящегося в текущий момент на точке, на зарядную станцию, и направление второго БПЛА в точку для размещения ретранслятора, обеспечивая требуемую зоны покрытия радиосигнала.
[0040] На Фиг. 4 представлен общий вид вычислительного устройства (400), с помощью которого может быть реализовано заявленное решение. В общем случае, вычислительное устройство (400) содержит объединенные общей шиной информационного обмена один или несколько процессоров (401), средства памяти, такие как ОЗУ (402) и ПЗУ (403), интерфейсы ввода/вывода (404), устройства ввода/вывода (405), и устройство для сетевого взаимодействия (406).
[0041] Процессор (401) (или несколько процессоров, многоядерный процессор) могут выбираться из ассортимента устройств, широко применяемых в текущее время, например, компаний Intel™, AMD™, Apple™, Samsung Exynos™, MediaTEK™, Qualcomm Snapdragon™ и т.п. Под процессором также необходимо учитывать графический процессор, например, GPU NVIDIA или ATI, который также является пригодным для полного или частичного выполнения способа (200, 300). При этом, средством памяти может выступать доступный объем памяти графической карты или графического процессора.
[0042] ОЗУ (402) представляет собой оперативную память и предназначено для хранения исполняемых процессором (401) машиночитаемых инструкций для выполнение необходимых операций по логической обработке данных. ОЗУ (402), как правило, содержит исполняемые инструкции операционной системы и соответствующих программных компонент (приложения, программные модули и т.п.).
[0043] ПЗУ (403) представляет собой одно или более устройств постоянного хранения данных, например, жесткий диск (HDD), твердотельный накопитель данных (SSD), флэш-память (EEPROM, NAND и т.п.), оптические носители информации (CD-R/RW, DVD-R/RW, BlueRay Disc, MD) и др.
[0044] Для организации работы компонентов устройства (400) и организации работы внешних подключаемых устройств применяются различные виды интерфейсов В/В (404). Выбор соответствующих интерфейсов зависит от конкретного исполнения вычислительного устройства, которые могут представлять собой, не ограничиваясь: PCI, AGP, PS/2, IrDa, Fire Wire, LPT, COM, SATA, IDE, Lightning, USB (2.0, 3.0, 3.1, micro, mini, type C), TRS/Audio jack (2.5, 3.5, 6.35), HDMI, DVI, VGA, Display Port, RJ45, RS232 и т.п.
[0045] Для обеспечения взаимодействия пользователя с вычислительным устройством (400) применяются различные средства (405) В/В информации, например, клавиатура, дисплей (монитор), сенсорный дисплей, тач-пад, джойстик, манипулятор мышь, световое перо, стилус, сенсорная панель, трекбол, динамики, микрофон, средства дополненной реальности, оптические сенсоры, планшет, световые индикаторы, проектор, камера, средства биометрической идентификации (сканер сетчатки глаза, сканер отпечатков пальцев, модуль распознавания голоса) и т.п.
[0046] Средство сетевого взаимодействия (406) обеспечивает передачу данных устройством (400) посредством внутренней или внешней вычислительной сети, например, Интранет, Интернет, ЛВС и т.п. В качестве одного или более средств (406) может использоваться, но не ограничиваться: Ethernet карта, GSM модем, GPRS модем, LTE модем, 5G модем, модуль спутниковой связи, NFC модуль, Bluetooth и/или BLE модуль, Wi-Fi модуль и др.
[0047] Дополнительно могут применяться также средства спутниковой навигации в составе устройства (300), например, GPS, ГЛОНАСС, BeiDou, Galileo.
[0048] Представленные материалы заявки раскрывают предпочтительные примеры реализации технического решения и не должны трактоваться как ограничивающие иные, частные примеры его воплощения, не выходящие за пределы испрашиваемой правовой охраны, которые являются очевидными для специалистов соответствующей области техники.
Настоящее изобретение относится к области компьютерной техники. Технический результат заключается в обеспечении зоны покрытия радиосигналом на маршрутах следования инкассаторских транспортных средств (ИТС), повышая эффективность определения точек для размещения в них ретрансляторов радиосигнала. Способ обеспечения зоны покрытия радиосвязи на маршрутах следования инкассаторских транспортных средств (ИТС) выполняется с помощью по меньшей мере одного вычислительного устройства и содержит этапы, на которых осуществляют сбор данных о зоне покрытия радиосигналом местности, включая по меньшей мере сведения об установленных базовых станциях (БС), а также плотности застройки и высоте рельефа, выполняют обучение модели машинного обучения на основании собранных данных о зоне покрытия местности, в ходе которого тренируют модель на определение точек на местности для размещения ретрансляторов радиосигнала, получают данные маршрута перемещения по меньшей мере одного ИТС, определяют по меньшей мере одну целевую точку на местности по маршруту следования ИТС, в которой уровень радиосигнала отсутствует или ниже заданного порогового значения, определяют с помощью упомянутой модели машинного обучения точку на местности для размещения ретранслятора радиосигнала, обеспечивающего зону покрытия радиосигналом, охватывающую упомянутую целевую точку, формируют полетное задание для беспилотного летательного аппарата (БПЛА) с установленным ретранслятором радиосигнала, содержащее по меньшей мере маршрут перемещения БПЛА и координаты точки размещения ретранслятора, определенной с помощью модели машинного обучения, направляют БПЛА в точку размещения ретранслятора. 2 н. и 6 з.п. ф-лы, 4 ил.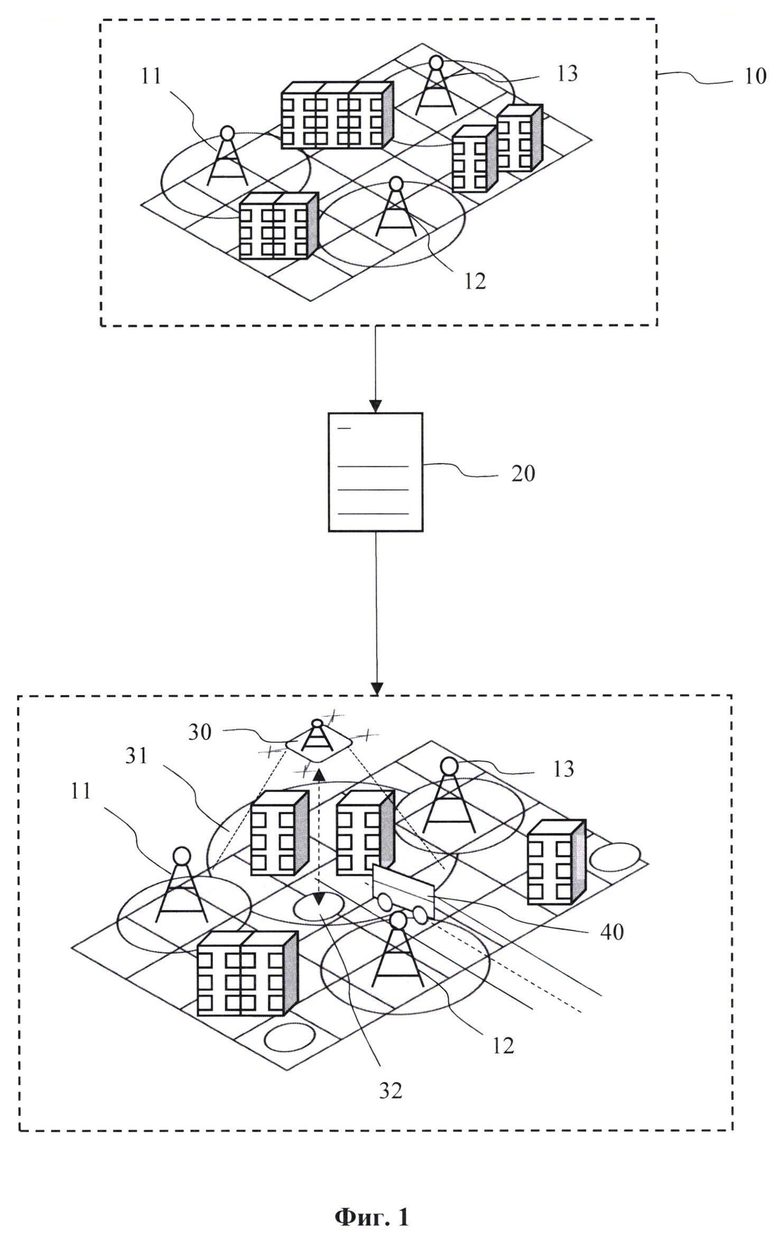
1. Способ обеспечения зоны покрытия радиосвязи на маршрутах следования инкассаторских транспортных средств (ИТС), выполняемый с помощью по меньшей мере одного вычислительного устройства и содержащий этапы, на которых:
осуществляют сбор данных о зоне покрытия радиосигналом местности, включая по меньшей мере сведения об установленных базовых станциях (БС), а также плотности застройки и высоте рельефа;
выполняют обучение модели машинного обучения на основании собранных данных о зоне покрытия местности, в ходе которого тренируют модель на определение точек на местности для размещения ретрансляторов радиосигнала;
получают данные маршрута перемещения по меньшей мере одного ИТС;
определяют по меньшей мере одну целевую точку на местности по маршруту следования ИТС, в которой уровень радиосигнала отсутствует или ниже заданного порогового значения;
определяют с помощью упомянутой модели машинного обучения точку на местности для размещения ретранслятора радиосигнала, обеспечивающего зону покрытия радиосигналом, охватывающую упомянутую целевую точку;
формируют полетное задание для беспилотного летательного аппарата (БИЛА) с установленным ретранслятором радиосигнала, содержащее по меньшей мере маршрут перемещения БИЛА и координаты точки размещения ретранслятора, определенной с помощью модели машинного обучения, при этом при формировании полетного задания определяется близость к установленным в данной области БС;
направляют БПЛА в точку размещения ретранслятора, при этом БПЛА связывается по беспроводному каналу передачи данных с БС в зоне нахождения точки размещения ретранслятора.
2. Способ по п. 1, характеризующийся тем, что дополнительно получают данные помех на радиочастотах в зоне покрытия.
3. Способ по п. 1, характеризующийся тем, что рассчитывается время прибытия ИТС в целевую точку.
4. Способ по п. 3, характеризующийся тем, что полетное задание дополнительно включает время прибытия ИТС в целевую точку.
5. Способ по п. 4, характеризующийся тем, что полетное задание передается БПЛА, обеспечивающему прибытие в точку размещения ретранслятора ко времени прибытия ИТС.
6. Способ по п. 1, характеризующийся тем, что беспроводной канал передачи данных представляет собой атмосферную оптическую линию связи.
7. Способ по п. 1, характеризующийся тем, что ретранслятор на БПЛА содержит поворотную антенну.
8. Система обеспечения зоны покрытия радиосвязи на маршрутах следования инкассаторских транспортных средств (ИТС), содержащая:
вычислительное устройство, выполненное с возможностью
осуществлять сбор данных о зоне покрытия радиосигналом местности, включая по меньшей мере сведения об установленных базовых станциях (БС), а также плотности застройки и высоте рельефа;
выполнять обучение модели машинного обучения на основании собранных данных о зоне покрытия местности, в ходе которого тренируют модель на определение точек на местности для размещения ретрансляторов радиосигнала;
получения данных маршрута перемещения по меньшей мере одного ИТС;
определения по меньшей мере одной целевой точки на местности по маршруту следования ИТС, в которой уровень радиосигнала отсутствует или ниже заданного порогового значения;
определения с помощью упомянутой модели машинного обучения точки на местности для размещения ретранслятора радиосигнала, обеспечивающего зону покрытия радиосигналом, охватывающую упомянутую целевую точку;
формирования полетного задания для БПЛА с установленным ретранслятором радиосигнала, при этом полетное задание содержит по меньшей мере маршрут перемещения БПЛА и координаты точки размещения ретранслятора, определенной с помощью модели машинного обучения, при этом при формировании полетного задания определяется близость к установленным в данной области БС;
передачи полетного задания на БПЛА;
БПЛА, выполненный с возможностью получения полетного задания от вычислительного устройства, перемещения в указанную точку размещения ретранслятора и осуществления соединения по беспроводному каналу передачи данных с БС в зоне нахождения точки размещения ретранслятора.
| US 20220399936 A1, 15.12.2022 | |||
| US 20180293897 A1, 11.10.2018 | |||
| US 20200258402 A1, 13.08.2020 | |||
| US 20190378150 A1, 12.12.2019 | |||
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |

