Изобретение относится к способам доставки грузов при помощи беспилотных летательных аппаратов [B64C39/00, B64D1/00].
Из уровня техники известен СПОСОБ ДОСТАВКИ ГРУЗОВ [RU 2693138, опубл. 01.07.2019], в котором получают информацию об идентификаторах, связанных с получателем груза, с помощью системы управления хранилища, имеющей возможность ввода данных, отправляемый груз принимают в ячейке хранилища, либо отправляемый груз принимают в ячейке хранилища и блокируют ячейку замочным механизмом, либо отправляемый груз принимают в пользовательской области, а с помощью системы управления хранилища и механизмов перемещения перемещают груз в хранилище, далее с помощью системы управления хранилища передают информацию о грузе и связанных с ним идентификаторах системе управления доставкой, с помощью которой назначают конкретный беспилотный летательный аппарат либо автономно действующий беспилотный летательный аппарат, после назначения беспилотного летательного аппарата с помощью навигационной системы перемещают беспилотный летательный аппарат до хранилища, в котором находится груз, с помощью беспилотного летательного аппарата идентифицируют хранилище с помощью идентификаторов, а также определяют курьерскую область, с помощью системы управления хранилища и механизмов перемещения перемещают груз с ячейки хранилища в курьерскую область, откуда с помощью беспилотного летательного аппарата забирают груз, либо
после назначения беспилотного летательного аппарата беспилотный летательный аппарат используют, чтобы забрать груз из хранилища, далее с помощью беспилотного летательного аппарата, навигационной системы и системы управления доставкой либо с помощью беспилотного летательного аппарата, действующего автономно, и навигационной системы доставляют груз внутрь хранилища, имеющего идентификатор, и получают информацию об идентификаторе получателя груза при помощи системы управления хранилища посредством связи от беспилотного летательного аппарата либо системы управления доставкой, либо груз сам содержит идентификатор для дальнейшего распознавания получателя, либо доставляют груз в курьерскую область хранилища, с которым связан получатель груза, идентифицируя хранилище, а с помощью системы управления доставкой либо автономно действующего беспилотного летательного аппарата передают системе управления хранилищем информацию, связанную с идентификаторами получателя груза, либо груз сам содержит идентификатор для дальнейшего распознавания получателя, а с помощью системы управления хранилищем и механизмов перемещения перемещают груз в хранилище, после этого ожидают прибытия получателя груза к хранилищу и получатель груза самостоятельно забирает свой груз из ячейки, либо получатель груза проходит авторизацию в системе управления хранилища и с помощью системы управления хранилища разблокируют запертую ячейку хранилища, в которой хранится груз, и дают возможность получателю груза забрать груз из хранилища самостоятельно, либо получатель груза проходит авторизацию в системе управления хранилища и с помощью системы управления хранилища и механизмов перемещения перемещают груз из хранилища в пользовательскую область, откуда получатель груза забирает свой груз.
Также из уровня техники известна ДОСТАВКА ТОВАРОВ С ПОМОЩЬЮ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА [US 2024037487, опубл. 01.02.2024], включающая определение целевого пункта назначения доставки для региональной полезной нагрузки, состоящей из одного рецептурного препарата, сервером, коммуникативно связанным с беспилотным летательным аппаратом (БПЛА) дальнего действия, включающим самолет с фиксированным крылом, сконфигурированный для выполнения перелетов из пункта в пункт в региональном узле, и несколькими местными беспилотными летательными аппаратами (БПЛА), включающими винтокрылые многороторные самолеты, сконфигурированные для нахождения в региональном узле и выполнения доставок с использованием бокового перемещения и операций зависания; передача сервером через устройство связи первых инструкций на БПЛА дальнего действия, предписывающих БПЛА дальнего действия лететь в региональный узел с полезной нагрузкой дальнего действия, включающей множество региональных полезных нагрузок, связанных с множеством целевых пунктов доставки, при этом множество региональных полезных нагрузок включает региональную полезную нагрузку, состоящую из одного рецептурного препарата, а множество целевых пунктов доставки включает целевой пункт доставки; передача сервером через устройство связи вторичных инструкций локальному БПЛА из множества локальных БПЛА для того, чтобы: получить региональную полезную нагрузку, состоящую из одного рецептурного препарата; транспортировать региональный полезный груз из регионального узла в целевой пункт доставки; выполнять боковое перемещение и операции зависания для доступа к месту доставки целевого пункта назначения; и доставить один рецептурный препарат, выпустив региональный груз в месте доставки целевого назначения.
Наиболее близким по технической сущности является СПОСОБ ДОСТАВКИ ГРУЗОВ [RU 2726244, опубл. 10.07.2020], в котором получают груз от пользователя и передают груз беспилотному летательному аппарату, так же получают от пользователя информацию о получателе груза с помощью беспилотных летательных аппаратов, либо с помощью компьютеров, либо с помощью указания этой информации на упаковке груза и передают эту информацию автоматической системе управления доставкой либо человеку, управляющему беспилотным летательным аппаратом, затем определяют местоположение, в которое необходимо доставить груз, на основании информации о местоположении, в котором находится или будет находиться получатель груза, далее с помощью системы навигации планируют маршрут беспилотного летательного аппарата, после чего перемещают беспилотный летательный аппарат с грузом в местоположение, в которое необходимо доставить груз, далее идентифицируют получателя груза или принимают от получателя груза информацию о готовности принять груз, после чего передают груз получателю груза.
Основной технической проблемой аналогов и прототипа является низкая сохранность грузов при транспортировке их БПЛА по маршрутам, из-за того, что в ходе полетов есть вероятность столкновения БПЛА между собой и, как следствие, присутствует возможность механической деформации грузов. Также аналогами и прототипом не предусматривается возможность транспортировки на минимально возможных высотах, а также возможности обнаружения и облета запрещенных (сложных) для транспортировки участков маршрута, что также не позволяет добиться заявленного технического результата.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом является повышение сохранности грузов доставляемых БПЛА на маршрутах доставки.
Указанный технический результат достигается за счет того, что способ доставки грузов при помощи беспилотных летательных аппаратов характеризуется тем, что первоначально между пунктами доставки формируют маршруты, для чего между пунктами доставки рассчитывают расстояние, которое должен преодолеть беспилотный летательный аппарат, также между пунктами доставки определяют минимально возможные высоты прокладки маршрута, далее все полученные маршруты ранжируют по высоте полета от минимальной к максимальной,
далее берут маршрут с наименьшим расстоянием между пунктами доставки и определенной минимально возможной высотой прокладки маршрута,
далее берут следующий по расстоянию между пунктами доставки маршрут, и если его минимально возможная высота прокладки маршрута больше минимально возможной высоты прокладки предыдущего маршрута на величину не менее защитного интервала, то определенная минимальная возможная высота прокладки маршрута так же остается неизменной,
если его минимально возможная высота прокладки маршрута меньше суммы минимально возможной высоты предыдущего маршрута и защитного интервала, то определяют новую минимально возможную высоту прокладки маршрута как сумму минимально возможной высоты прокладки предыдущего маршрута и защитного интервала,
при осуществлении доставки груз от заказчика получают в пункте доставки, далее осуществляют загрузку груза в беспилотный летательный аппарат, далее осуществляют полет беспилотным летательным аппаратом по одному из сформированных от одного пункта доставки до другого пункта доставки маршрутов, после прибытия беспилотного летательного аппарата осуществляют его разгрузку и передают груз получателю в пункте доставки.
В частности, между пунктами доставки рассчитывают расстояние, которое должен преодолеть беспилотный летательный аппарат, как кратчайшее расстояние между пунктами доставки.
В частности, между пунктами доставки определяют зоны, запрещенные для пролета, и рассчитывают расстояния, которые необходимо преодолеть беспилотному летательному аппарату огибая указанные зоны по часовой стрелке и против часовой стрелки, формируя тем самым варианты маршрутов для всех комбинаций огибаний зон, запрещенных для пролета, далее выбирают маршрут с наименьшим расчетным расстоянием, тем самым рассчитывают расстояние, которое должен преодолеть беспилотный летательный аппарат между пунктами доставки.
В частности, величину защитного интервала по высоте выбирают в диапазоне от 2 до 8 метров.
В частности, загрузку груза в беспилотный летательный аппарат осуществляют посредством креплений груза.
В частности, осуществляют полет беспилотным летательным аппаратом по одному из сформированных маршрутов от одного пункта доставки до другого пункта доставки при помощи оператора.
В частности, осуществляют полет беспилотным летательным аппаратом по одному из сформированных маршрутов от одного пункта доставки до другого пункта доставки при помощи автопилота.
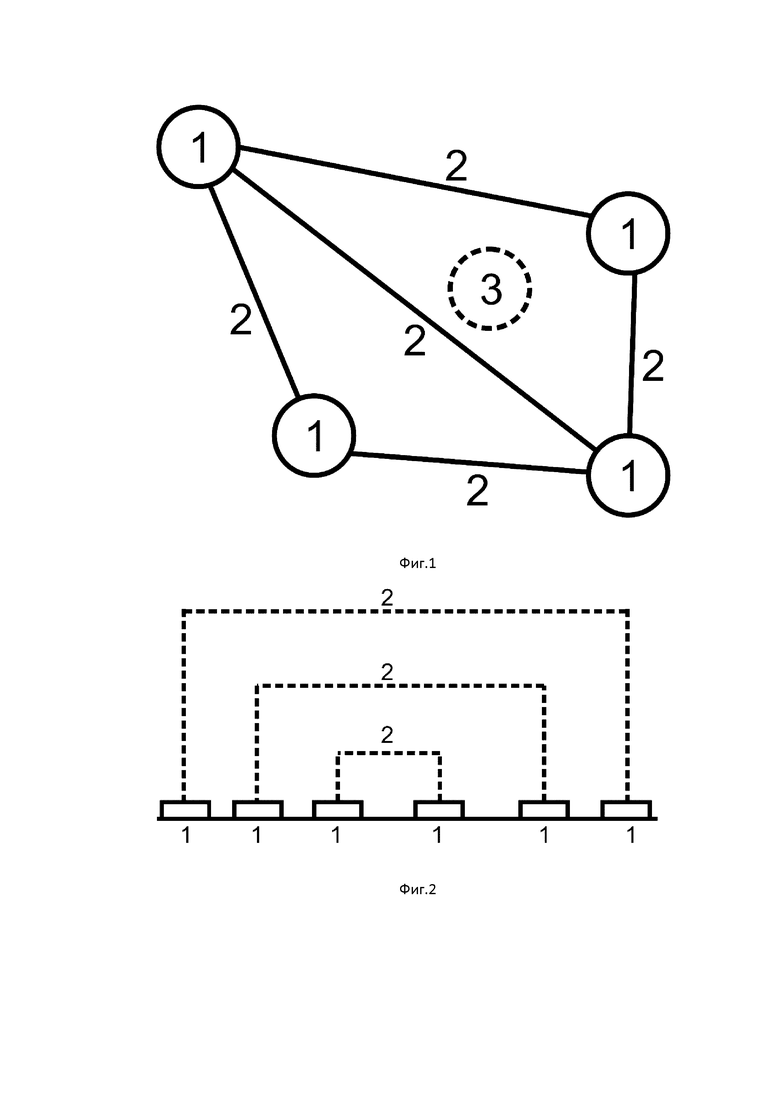
На фиг.1 схематично показаны пункты доставки, маршруты и центр управления полетом.
На фиг.2 схематично показан принцип формирования маршрутов.
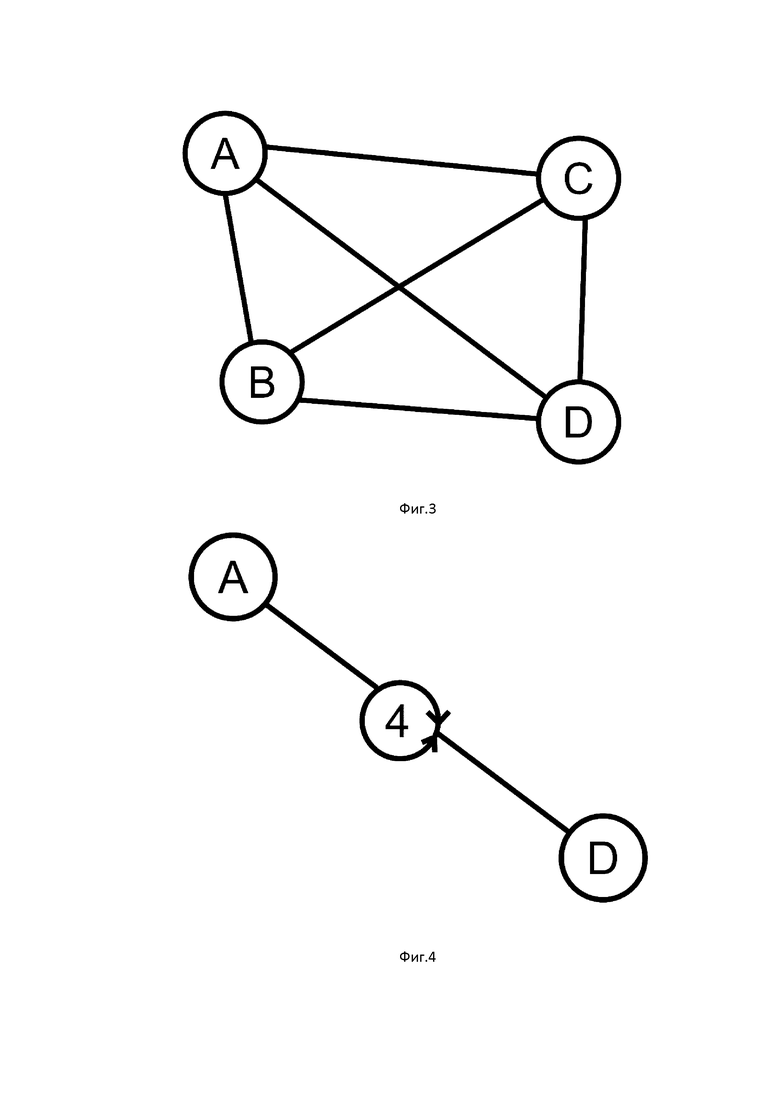
На фиг.3 схематично показан пример маршрутов между четырьмя пунктами доставки.
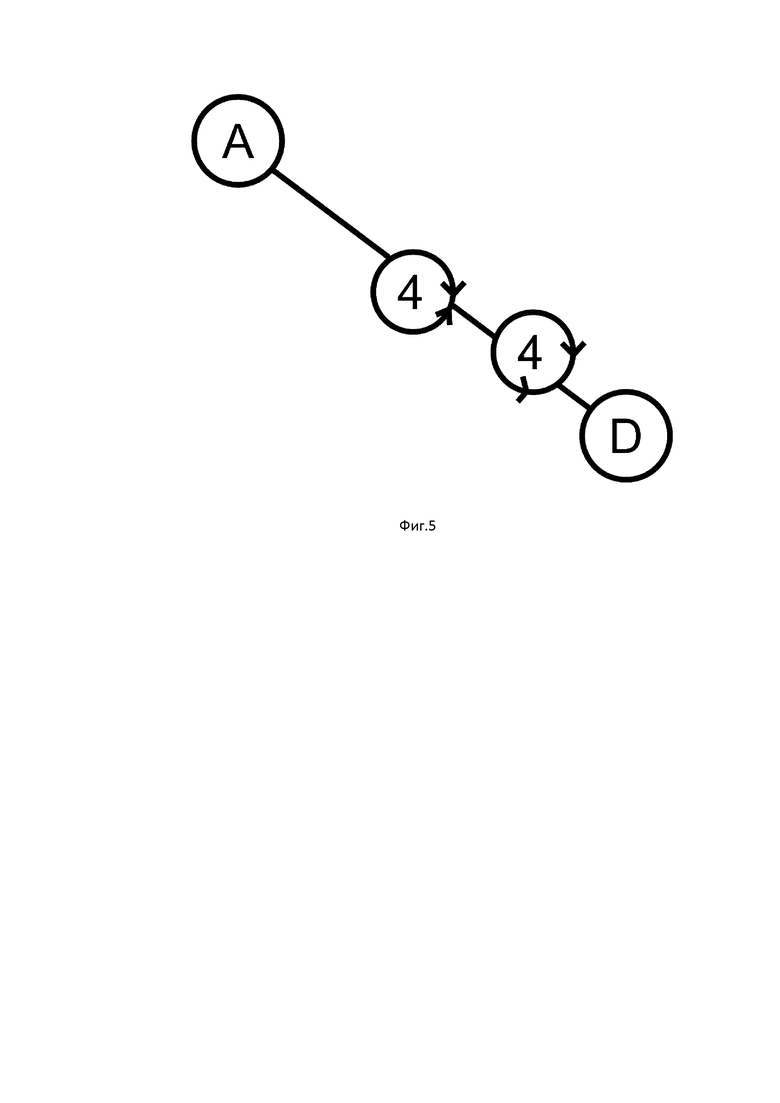
На фиг.4, 5 схематично показаны иллюстрации для расчета маршрутов с учетом наличия запрещенных для пролета зон.
На фигурах обозначено: 1 - пункт доставки; 2 - маршрут; 3 - центр управления полетом; 4 - запрещенные для пролета зоны; A, B, C, D - примеры различных пунктов доставки.
Способ доставки грузов при помощи беспилотных летательных аппаратов реализуется посредством стационарных пунктов доставки 1, расположенных на некотором удалении друг от друга. Пункты доставки 1 выполнены с возможностью приема и отправки беспилотных летательных аппаратов на маршруты 2 с соответствующим грузом. Пункты доставки 1 выполнены:
- с механизмами для загрузки и выгрузки грузов из БПЛА;
- с системой подтверждения доставки (отправки) грузка;
- оснащены техническими средствами обеспечения безопасности доставки груза во время полёта.
Маршруты 2 представляют собой заблаговременно определенные траектории движения БПЛА между двумя пунктами доставки 1. Также в комплекс технических мер для реализации заявленного способа входит центр управления полетом 3. Центр управления полетом выполнен 3 с возможностью наблюдения за всеми перемещениями БПЛА по маршрутам 2. Центры управления полетом 3 обеспечивают:
- безопасность полета БПЛА по маршрутам 2;
- возможность мониторинга за движением БПЛА в реальном времени;
- бесперебойную связь со всеми БПЛА.
Для реализации заявленного способа могут использоваться БПЛА отечественного и/или зарубежного производства, которые оснащены:
- системой навигации и позиционирования (например GPS, ГЛОНАСС, системами визуального позиционирования);
- системой управления полётом (позволяет отслеживать БВС в режиме реального времени);
- системой связи для передачи данных и управления;
- системой обнаружения и предотвращения столкновений с препятствиями (для БВС с датчиками приближения, благодаря которым БВС способен самостоятельно корректировать курс движения для избежания столкновения с препятствиями, пример - DJI MAVIC 3);
- грузовым отсеком или механизмом крепления груза для размещения груза.
Способ доставки грузов при помощи беспилотных летательных аппаратов реализуется с подготовительным этапом, на котором формируются маршруты 2 доставки между пунктами доставки 1. Первоначально формируется конечная совокупность пунктов доставки 1 расположенных друг от друга на некотором расстоянии. Далее между пунктами доставки 1 формируются маршруты 2. При этом маршруты 2 формируются следующим образом: рассчитываются расстояния (которые должен преодолеть БПЛА) между парами пунктов доставки 1; одновременно с этим для каждого возможного маршрута 2 (пары пунктов доставки 1) определяют минимально возможную высоту прокладки маршрута 2.
В рамках реализации заявленного способа возможны различные варианты формирования значений расстояний между двумя пунктами доставки 1 (длины маршрута 2). В частности, возможен вариант реализации, при котором маршрут 2 формируется по кратчайшему расстоянию между двумя точками (пунктами доставки 1).
В частности, возможен вариант реализации, когда заблаговременно на карте указаны запрещённые для пролета зоны 4 и маршрут 2 строится с учетом возможности облета указанных зон по кратчайшему пути. При этом запрещенные для пролета зоны 4 могут быть указаны как в связи с требованием государственных органов, так и самостоятельно разработчиками маршрутов 2 (например, запрещенная для пролета зона 4 может быть указана из-за наличия в ее области высокого строения или источника электромагнитных помех). В случае, если потенциальный маршрут 2 строиться с учетом наличия запрещенных для пролета зон 4, то по предварительно составленному маршруту 2 может быть запущен тестовый БПЛА, в ходе движения которого будут фиксироваться запрещенные для пролета зоны 4 (например, зоны, в которых у БПЛА ухудшается или теряется связь - могут быть отмечены техническим персоналом как запрещенные). В частности, маршрут 2 с учетом наличия запрещенных для пролета зон 4 может быть сформирован следующим образом: формируют прямую между пунктами доставки 1, если эта прямая пересекает запрещенную для пролета зону 4, то формируется маршрут 2, огибающий запрещенную для пролета зону 4 по часовой стрелке и маршрут 2, огибающий запрещенную для пролета зону 4 против часовой стрелки. Таким образом, рассчитывается расстояние для двух потенциально возможных маршрутов 2. Если на каждом из маршрутов 2 возникает очередная запрещенная для пролета зона 4, то поступают аналогиям образом, просчитывают варианты облета этой зоны против и по часовой стрелке. Таким образом, формируется база возможных маршрутов 2 в количестве 2N, где N - это количество запрещенных для пролета зон 4. Для каждого маршрута 2 из базы рассчитывается расстояние маршрута 2 и среди них выбирается маршрут 2 с наименьшим расстоянием, по которому впоследствии и будет осуществляться доставки грузов БПЛА.
В рамках реализации заявленного способа возможны различные варианты формирования минимально возможной высоты прокладки маршрута 2. В частности, возможен вариант реализации, при котором на маршруте 2 выбирают самый высокий объект, считают его высоту и прибавляют к полученному значению некоторую константу.
После того как для каждого маршрута 2 (каждой пары пунктов доставки 1) рассчитаны расстояние и минимально возможная высота прокладки маршрута 2. Все маршруты 2 ранжируются по расстоянию от минимума к максимуму. Далее, в первую очередь берется маршрут 2 с наименьшим расстоянием и соответствующей высотой полета - его рассчитанная высота полета БПЛА остается неизменной. Далее берется следующий по длине маршрут 2, если его минимально возможная высота больше минимально возможной высоты маршрута 2 предыдущего (более короткого маршрута 2) на величину защитного интервала, то рассчитанная высота полета БПЛА на маршруте 2 так же остается неизменной. Если же его минимально возможная высота меньше суммы минимально возможной высоты маршрута 2 предыдущего (более короткого маршрута 2) и защитного интервала - рассчитанная высота полета БПЛА на маршруте 2 становиться равной высота полета БПЛА на предыдущем (более коротком) маршруте 2 плюс защитный интервал. Аналогичная процедура расчета повторяется для всех маршрутов 2. В итоге получается, что чем более протяжённым является маршрут 2, тем на большей высоте он прокладывается, при этом траектории полетов всех БПЛА не пересекаются между собой.
После формирования маршрутов 2 реализуется доставка грузов от одного пункта доставки 1 до другого по требованию.
Вариант реализации заявленного способа
После подготовки и проверки маршрутов 2 доставка грузов реализуется в несколько этапов.
1. получение груза от Заказчика.
Получение груза от заказчика будет осуществляться в специально оборудованном отделе доставки (пункте доставки 1).
2. загрузка груза в БПЛА.
Загрузка грузов в БПЛА будет проводиться техническим персоналом за счёт крепления груза к механизму крепления груза. Возможны варианте использования крепежей различных видов:
- обычные системы сброса с одним сервоприводом;
- может использоваться подсоединяемый к нижней части контейнер в форме «шкатулки», устанавливаемой на БПЛА собственного производства - в данном варианте створки «шкатулки» удерживаются двумя сервоприводами;
- использование систем крепления груза, напечатанных с помощью технологии 3D-печати.
Управление системами крепежа может осуществляться следующим образом:
- взаимодействие «вручную» (просто отсоединить груз руками);
- механическим способом (оператор БПЛА посылает команду удаленно на включение сервопривода, груз в таком случае сбрасывается из системы крепежа).
3. перелёт из точки А (точка вылета) в точку Б (точка разгрузки) - между пунктами доставки 1.
Перелёт осуществляется при помощи оператора БВС. В варианте реализации возможно перемещение БПЛА посредством автопилота.
4. разгрузка груза с БПЛА.
Разгрузка груза может происходить:
- с помощью технического персонала (ручная выгрузка), при этом дрон будет садиться на землю и заглушать двигатели, чтобы технический персонал мог беспрепятственно произвести выгрузку груза с БВС. При выгрузке без технического персонала имеется возможность выгрузки на земле (для хрупких грузов, в этом случает дрон «садится на груз») а после отсоединения улетает.
- выгрузка в воздухе, над землёй (когда технические характеристики груза позволяют это сделать), высота зависит типа БВС, а также от типа груза.
5. передача груза адресату.
Передача груза заказчику может быть организована следующим образом:
первый вариант - БПЛА отправляется напрямую к заказчику (в случае, если у заказчика есть собственный пункт доставки 1, заказчик подготавливает площадку для доставки груза, а также инструктирует своих штатных (или наемных) сотрудников к действиям по приему доставленного груза с БПЛА);
второй вариант - доставка осуществляется в один из специально оборудованных пунктов доставки 1, откуда Заказчик самостоятельно забирает свой доставленный груз.
6. возврат БВС в точку вылета (опционально).
Возврат осуществляется оператором БПЛА. В перспективе возможно возвращение посредством автопилота. При этом в некоторых случаях возвращения может не требоваться, если, например, из того пункта доставки 1 где находиться БПЛА, необходимо доставить груз в другой пункт доставки 1.
Таким образом, сущность заявленного способа заключается в осуществлении городской и меж городской доставки малогабаритных грузов (почтовой корреспонденции) с помощью БПЛА с учетом минимизации риска повреждения груза и минимизации задействованных для доставки высот.
Примеры формирования маршрутов 2 для заваленного способа
1. Пример расчета расстояний между пунктами доставки 1
Пусть расстояния между четырьмя пунктами доставки 1 рассчитаны напрямую (по кратчайшему пути на карте):
расстояние между A и B пунктами доставки 1 - 10 км;
расстояние между A и C пунктами доставки 1 - 20 км;
расстояние между A и D пунктами доставки 1 - 30 км;
расстояние между B и C пунктами доставки 1 - 40 км;
расстояние между B и D пунктами доставки 1 - 45 км;
расстояние между C и D пунктами доставки 1 - 35 км.
В таком случае указанные расстояния будут являться конечными значениями.
2. Пример расчета расстояний между двумя пунктами доставки 1 с учетом наличия запрещенной для пролета зоны 4 (фиг.4)
Пусть между пунктами A и D по прямой 30 км, при этом посередине маршрута 2 есть запрещенная для пролета зона 4, в таком случае маршрут 2 с огибанием запрещенной для пролета зоны 4 по часовой стрелке составит 35 км; маршрут 2 с огибанием запрещенной для пролета зоны 4 против часовой стрелке составит 45 км. В таком случае выбирается маршрут 2 с наименьшим общим расстоянием, а именно: маршрут 2 с огибанием запрещенной для пролета зоны 4 по часовой стрелке.
3. Пример расчета расстояний между двумя пунктами доставки 1 с учетом наличия двух запрещенных для пролета зон 4 (фиг. 5)
Пусть между пунктами A и D по прямой 30 км, при этом на маршруте 2 есть две запрещенные для пролета зона 4, в таком случае:
маршрут 2 с огибанием первой запрещенной для пролета зоны 4 по часовой стрелке и огибанием второй запрещенной для пролета зоны 4 по часовой стрелке составит 40 км;
маршрут 2 с огибанием первой запрещенной для пролета зоны 4 по часовой стрелке и огибанием второй запрещенной для пролета зоны 4 против часовой стрелки составит 38 км;
маршрут 2 с огибанием первой запрещенной для пролета зоны 4 против часовой стрелки и огибанием второй запрещенной для пролета зоны 4 по часовой стрелке составит 48 км;
маршрут 2 с огибанием первой запрещенной для пролета зоны 4 против часовой стрелки и огибанием второй запрещенной для пролета зоны 4 против часовой стрелки составит 46 км;
В таком случае выбирается маршрут 2 с наименьшим общим расстоянием, а именно: маршрут 2 с огибанием первой запрещенной для пролета зоны 4 по часовой стрелке и огибанием второй запрещенной для пролета зоны 4 против часовой стрелки.
4. Пример расчета минимально возможных высот прокладки маршрута 2 между пунктами доставки 1.
минимально возможная высота прокладки маршрута 2 между A и B пунктами доставки 1 - 15 м (на маршруте 2 застройка частными домами, равнинная местность);
минимально возможная высота прокладки маршрута 2 между A и C пунктами доставки 1 - 30 м (на маршруте 2 застройка пятиэтажными домами, равнинная местность);
минимально возможная высота прокладки маршрута 2 между A и D пунктами доставки 1 - 50 м (на маршруте 2 застройка девятиэтажными домами, равнинная местность);
минимально возможная высота прокладки маршрута 2 между B и C пунктами доставки 1 - 10 м (на маршруте 2 нет застройки, равнинная местность);
минимально возможная высота прокладки маршрута 2 между B и D пунктами доставки 1 - 10 м (на маршруте 2 нет застройки, равнинная местность);
минимально возможная высота прокладки маршрута 2 между C и D пунктами доставки 1 - 10 м (на маршруте 2 нет застройки, равнинная местность).
5. Пример формирования высот полетов БПЛА для маршрутов 2 между пунктами доставки 1
Исходные данные для формирования высот полетов БПЛА на маршрутах 2 показаны в таблице 1.
Таблица 1
Осуществляем ранжирование маршрутов по расстоянию (таблица 2):
Таблица 2
Пусть защитный интервал (который гарантирует то, что БПЛА не столкнуться друг другом) составляет 5 м. в таком случае минимально возможные высоты прокладки маршрута 2 будут рассчитаны следующим образом (таблица 3):
Таблица 3
Полученные в таблице 3 значения минимизируют вероятность того, что в ходе доставки грузов произойдет их повреждение из-за столкновения БПЛА между собой.
Экспериментально установлено, что в различных вариантах реализации защитный интервал может быть от 2 до 8 м в зависимости от географических условий реализации заявленного способа (2 метра для безветренных солнечных районов; 8 метров для районов с сильным ветром и плохими условиями видимости / частыми осадками).
Заявленный технический результат - повышение сохранности грузов доставляемых БПЛА на маршрутах доставки достигается за счет того, что маршруты 2 доставки формируются таким образом, чтобы у БПЛА не было физической возможности столкнуться друг с другом. Это реализуется благодаря тому, что чем более длинный маршрут 2 полета БПЛА, тем на большей высоте он происходит, таким образом, при взлете и посадке исключается вероятность столкновения с БПЛА на других маршрутах 2 доставки. Также заявленный технический результат достигается за счет того, что все маршруты 2 по высоте разнесены минимум - на величину защитного интервала, что минимизирует вероятность столкновения БПЛА между собой, и, как следствие, уменьшает вероятность повреждения груза. Также заявленное решение позволяет выбрать минимальную (из безопасных) доступных высот при движении БПЛА по маршруту 2, что также способствует сохранности груза с точки зрения минимизации повреждений при возможном падении БПЛА. В варианте реализации заявленный технический результат может быть достигнут за счет заблаговременного выявления запрещенных для пролета зон 4 (со слабым сигналом связи или наличием электромагнитных помех, передатчиков помех, средств РЭП и др.) и их огибания БПЛА с грузом при прохождении маршрута 2.
В хоте опытной реализации заявленного способа также были выявлены следующие его преимущества:
- высокая скорость доставки грузов (доставка грузов с помощью БПЛА может быть осуществлена за минуты, что особенно актуально для срочных заказов);
- низкая стоимость доставки (стоимость доставки при помощи БПЛА может быть значительно ниже, чем традиционные способы, особенно для небольших грузов);
- возможность доставки в труднодоступные места.
Варианты доставляемых посредством заявленного способа грузов:
- доставка лекарственных препаратов и медикаментов в труднодоступные районы;
- доставка химических, биологических и иных проб на предприятиях;
- доставка почтовой корреспонденции;
- доставка запчастей, расходных материалов и иного сырья для технически сложных объектов, расположенных в труднодоступных местах;
- доставка других грузов максимальной массой до 30 кг и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| Способ определения усредненных значений метеорологических параметров в пограничном слое атмосферы | 2019 |
|
RU2727315C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ МОНИТОРИНГА ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2012 |
|
RU2503936C2 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
| Беспилотный летательный аппарат для транспортировки компонентов крови | 2022 |
|
RU2791340C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) | 2018 |
|
RU2697474C1 |
| Многоцелевой комбинированный беспилотный летательный аппарат | 2024 |
|
RU2831435C1 |
Изобретение относится к способам доставки грузов при помощи беспилотных летательных аппаратов. Способ доставки грузов при помощи беспилотных летательных аппаратов характеризуется тем, что первоначально между пунктами доставки формируют маршруты, для чего между пунктами доставки рассчитывают расстояние, которое должен преодолеть беспилотный летательный аппарат, также между пунктами доставки определяют минимально возможные высоты прокладки маршрута, далее все полученные маршруты ранжируют по высоте полета от минимальной к максимальной. Далее берут маршрут с наименьшим расстоянием между пунктами доставки и определенной минимально возможной высотой прокладки маршрута. Далее берут следующий по расстоянию между пунктами доставки маршрут, и если его минимально возможная высота прокладки маршрута больше минимально возможной высоты прокладки предыдущего маршрута на величину не менее защитного интервала, то определенная минимальная возможная высота прокладки маршрута так же остается неизменной, а если его минимально возможная высота прокладки маршрута меньше суммы минимально возможной высоты предыдущего маршрута и защитного интервала, то определяют новую минимально возможную высоту прокладки маршрута как сумму минимально возможной высоты прокладки предыдущего маршрута и защитного интервала. При осуществлении доставки груз от заказчика получают в пункте доставки, далее осуществляют загрузку груза в беспилотный летательный аппарат, далее осуществляют полет беспилотным летательным аппаратом по одному из сформированных от одного пункта доставки до другого пункта доставки маршрутов. После прибытия беспилотного летательного аппарата осуществляют его разгрузку и передают груз получателю в пункте доставки. В результате повышается сохранность грузов, доставляемых беспилотными летательными аппаратами. 6 з.п. ф-лы, 5 ил., 3 табл.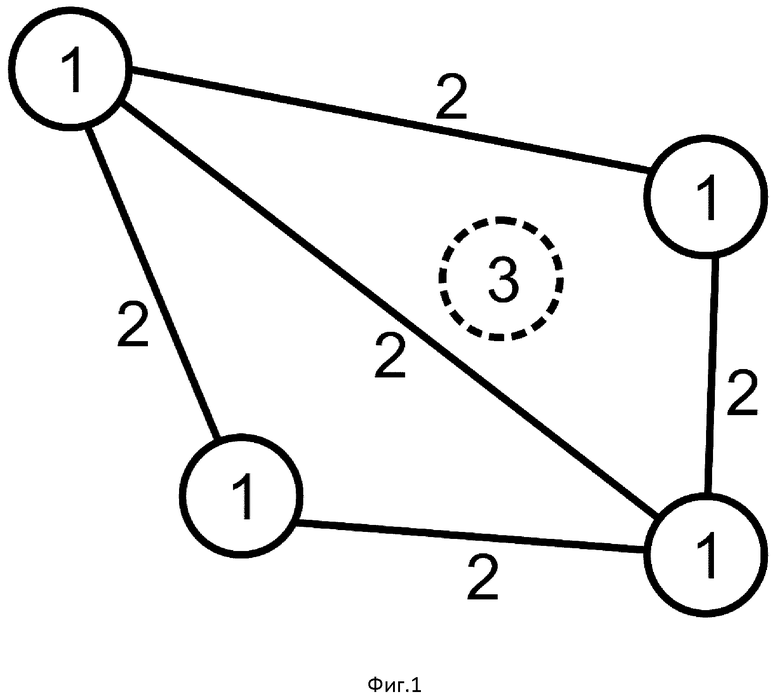
1. Способ доставки грузов при помощи беспилотных летательных аппаратов, характеризующийся тем, что
первоначально между пунктами доставки формируют маршруты, для чего между пунктами доставки рассчитывают расстояние, которое должен преодолеть беспилотный летательный аппарат, также между пунктами доставки определяют минимально возможные высоты прокладки маршрута, далее все полученные маршруты ранжируют по высоте полета от минимальной к максимальной,
далее берут маршрут с наименьшим расстоянием между пунктами доставки и определенной минимально возможной высотой прокладки маршрута,
далее берут следующий по расстоянию между пунктами доставки маршрут, и если его минимально возможная высота прокладки маршрута больше минимально возможной высоты прокладки предыдущего маршрута на величину не менее защитного интервала, то определенная минимальная возможная высота прокладки маршрута так же остается неизменной,
если его минимально возможная высота прокладки маршрута меньше суммы минимально возможной высоты предыдущего маршрута и защитного интервала, то определяют новую минимально возможную высоту прокладки маршрута как сумму минимально возможной высоты прокладки предыдущего маршрута и защитного интервала,
при осуществлении доставки груз от заказчика получают в пункте доставки, далее осуществляют загрузку груза в беспилотный летательный аппарат, далее осуществляют полет беспилотным летательным аппаратом по одному из сформированных от одного пункта доставки до другого пункта доставки маршрутов, после прибытия беспилотного летательного аппарата осуществляют его разгрузку и передают груз получателю в пункте доставки.
2. Способ по п.1, отличающийся тем, что между пунктами доставки рассчитывают расстояние, которое должен преодолеть беспилотный летательный аппарат, как кратчайшее расстояние между пунктами доставки.
3. Способ по п.2, отличающийся тем, что между пунктами доставки определяют зоны, запрещенные для пролета, и рассчитывают расстояния, которые необходимо преодолеть беспилотному летательному аппарату, огибая указанные зоны по часовой стрелке и против часовой стрелки, формируя тем самым варианты маршрутов для всех комбинаций огибаний зон, запрещенных для пролета, далее выбирают маршрут с наименьшим расчетным расстоянием, тем самым рассчитывают расстояние, которое должен преодолеть беспилотный летательный аппарат между пунктами доставки.
4. Способ по п.1, отличающийся тем, что величину защитного интервала по высоте выбирают в диапазоне от 2 до 8 метров.
5. Способ по п.1, отличающийся тем, что загрузку груза в беспилотный летательный аппарат осуществляют посредством креплений груза.
6. Способ по п.1, отличающийся тем, что осуществляют полет беспилотным летательным аппаратом по одному из сформированных маршрутов от одного пункта доставки до другого пункта доставки при помощи оператора.
7. Способ по п.1, отличающийся тем, что осуществляют полет беспилотным летательным аппаратом по одному из сформированных маршрутов от одного пункта доставки до другого пункта доставки при помощи автопилота.
| Способ доставки грузов | 2019 |
|
RU2726244C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| US 11697498 B2, 11.07.2023 | |||
| RU 226688 U1, 18.06.2024. | |||

