Изобретение относится к способу автономного управления группой беспилотных летательных аппаратов (БпЛА), осуществляющих полет по замкнутому маршруту в целях мониторинга местности контролируемого пространства.
Для реализации способа используют графовую модель замкнутого маршрута полета группы БпЛА: вершины графа совпадают с маршрутными точками, назначаемыми на маршруте полета оператором, а отрезки между маршрутными точками совпадают с ребрами графовой модели.
Маршрутные точки выбирают, с одной стороны - из условия решения поставленной задачи, с другой стороны - из условия исключения столкновения БпЛА друг с другом. Для исключения столкновения во время движения БпЛА модель предусматривает нахождение на отрезке маршрута между двумя вершинами только одного БпЛА, т.е. БпЛА начинает движение по отрезку маршрута между двумя маршрутными точками (по ребру графа) только в случае отсутствия БпЛА в любой части данного отрезка. Исключение столкновения обеспечивается за счет регулирования скорости полета БпЛА на каждом отрезке маршрута мониторинга, совпадающем с ребром графовой модели, с таким расчетом, чтобы каждый БпЛА проходил вершину графа в условиях отсутствия другого БпЛА в данной вершине, т.е. предыдущий БпЛА должен начать движение до того, как следующий БпЛА достигнет маршрутной точки, в которой находился предыдущий БпЛА, но после того, как наблюдаемый предыдущим БпЛА объект попадет в зону видимости следующего БпЛА.
Изобретение относится к области беспилотной авиации, а именно к автоматизированным системам управления и контроля группы БпЛА с использованием систем искусственного интеллекта, конкретно - генетических алгоритмов расчета маршрутов мониторинга.
Управление полетом группы БпЛА обеспечивает решение задачи мониторинга местности контролируемого пространства. Задача мониторинга заключается в облете пространства по заранее заданному маршруту, получение информации со средств контроля, ее обработки и принятии решения о состоянии контролируемого пространства.
Наряду с решением задач мониторинга реализация предлагаемого способа позволяет обеспечивать безопасность полета группы БпЛА в воздушном пространстве.
В настоящее время широкое распространение получили различные способы мониторинга пространств: разработаны системы мониторинга промышленных зон, городской застройки и прилегающих районов, лесных массивов на предмет выявления мест заражения химическими веществами, очагов возгорания, загрязнения воздуха. Основой мониторинга является решение задач поискового характера с помощью специальных датчиков, установленных на БпЛА.
Для решения подобных задач (задач поискового характера) используются группы БпЛА. Помимо решения основной задачи, необходимо постоянно решать задачу обеспечения безопасности полетов группы БпЛА, а именно, недопущения столкновения отдельных БпЛА. При этом безопасность полетов обеспечивается за счет задания минимально допустимого расстояния, в пределах которого недопустимо сближение летательных аппаратов.
Известен способ применения беспилотных летательных аппаратов и устройство управления (патент РФ №2457531, МПК G05D 1/00, опубл. 27.07.2012, бюл. №21) [1]. Предложен способ применения БпЛА, основанный на адаптации их режимов работы, в котором берется «n» БпЛА (n>3), БпЛА образуют в полете так называемую «этажерку»: первый БпЛА является ведущим, второй и третий ведомым, причем ведущий БпЛА занимает нижний высотный эшелон, второй БпЛА - промежуточный, третий - верхний.
Расстояние ведущего БпЛА от земной поверхности определяется безопасностью полета и безусловного выполнения поставленной задачи (например, высота полета должна быть приблизительно 50 м). Полет второго БпЛА осуществляется выше ведущего на 50 м, при этом второй БпЛА является ретранслятором данных по радиоканалу от первого БпЛА, который также по радиоканалу связан с наземной базовой станцией управления.
Недостатком известного способа является необходимость задания разных высот для обеспечения безопасности полета, отсутствие возможности автономного полета группы БпЛА и сокращение области мониторинга, потенциально доступной трем БпЛА при таком размещении.
Известен способ и устройство управления полетом группы летательных аппаратов (патент №2786276, МПК G08e 5/04; G05D 1/08, В64С 13/02, опубл. 19.12.2022, бюл. №35) [2].
Для управления группой БпЛА задают высоту полета в соответствии с условиями решаемой задачи, минимально допустимое расстояние между БпЛА и допустимое расстояние до рельефа местности, задают идентификаторы БпЛА и расстояние, определяющее радиус области с центром в точке нахождения БпЛА, определяют координаты БпЛА и передают их на другие БпЛА, совместно с их идентификаторами и формируют управляющие сигналы с учетом траектории и параметров движения других БпЛА группы - запрет приближения на минимально допустимое расстояние между БпЛА.
Недостаток известного способа заключается в необходимости сложной системы управления и трудности построения порядка полета.
Известен способ траекторного управления группой БпЛА при мониторинге городской застройки (патент РФ №2765758, МПК G01R 31/00, опубл. 02.02.2024 бюл. №4) [3].
Изобретение относится к способам траекторного управления группой БпЛА и может быть использовано для обеспечения полета группы БпЛА при решении задач мониторинга.
Облет городской застройки в горизонтальной плоскости осуществляется по заранее запланированному маршруту с обходом препятствий (например, здания, которое аппроксимируется прямоугольником) путем сравнения запланированного маршрута (информация о котором заложена в бортовом вычислительном комплексе) и текущей траектории полета, которая определяется штатными бортовыми средствами. Облет препятствий группой БпЛА осуществляется по очереди. При этом оператор для описания выбранного препятствия указывает только центр препятствия в виде прямоугольника, длины его стороны и ориентация.
Недостатки известного способа:
реализована только полуавтономная работа, т.е. реализация с участием оператора заранее рассчитанного и построенного (спланированного) маршрута, с поочередным обходом препятствия, что увеличивает время на проведение мониторинга;
уменьшена зона мониторинга из-за обеспечения гарантированной безопасности полета;
не предусмотрена возможность непрерывного мониторинга после выхода в намеченную точку.
Последний аналог является наиболее близким к предлагаемому изобретению и является его прототипом.
Способ управления полетом группы БпЛА заключается в том, что:
задают высоту полета в соответствии с условиями выполняемой задачи;
задают маршрут полета группы БпЛА;
задают допустимое расстояние между БпЛА из условий безопасности полета группы;
задают вектора движения на маршруте полета группы БпЛА.
Способ отличается тем, что:
задают замкнутый маршрут полета группы БпЛА, на котором выделяют маршрутные точки;
пролет каждого БпЛА обязателен через каждую маршрутную точку;
моделируют маршрут полета группы БпЛА Эйлеровым графом, вершины которого совпадают с маршрутными точками, а отрезки между маршрутными точками совпадают со всеми ребрами Эйлерового графа;
задают постоянный результирующий вектор движения между двумя маршрутными точками, следующих друг за другом;
задаются интервалы времени между сменой маршрутных точек каждым БпЛА из условий безопасности полета группы БпЛА;
при прохождении маршрутной точки каждым БпЛА изменяют вектора движения.
Обоснование графовой модели мониторинга группой БпЛА.
Исходные данные
Состав группы: n≥m+1, где n - число БпЛА в группе, m - количество наблюдаемых объектов.
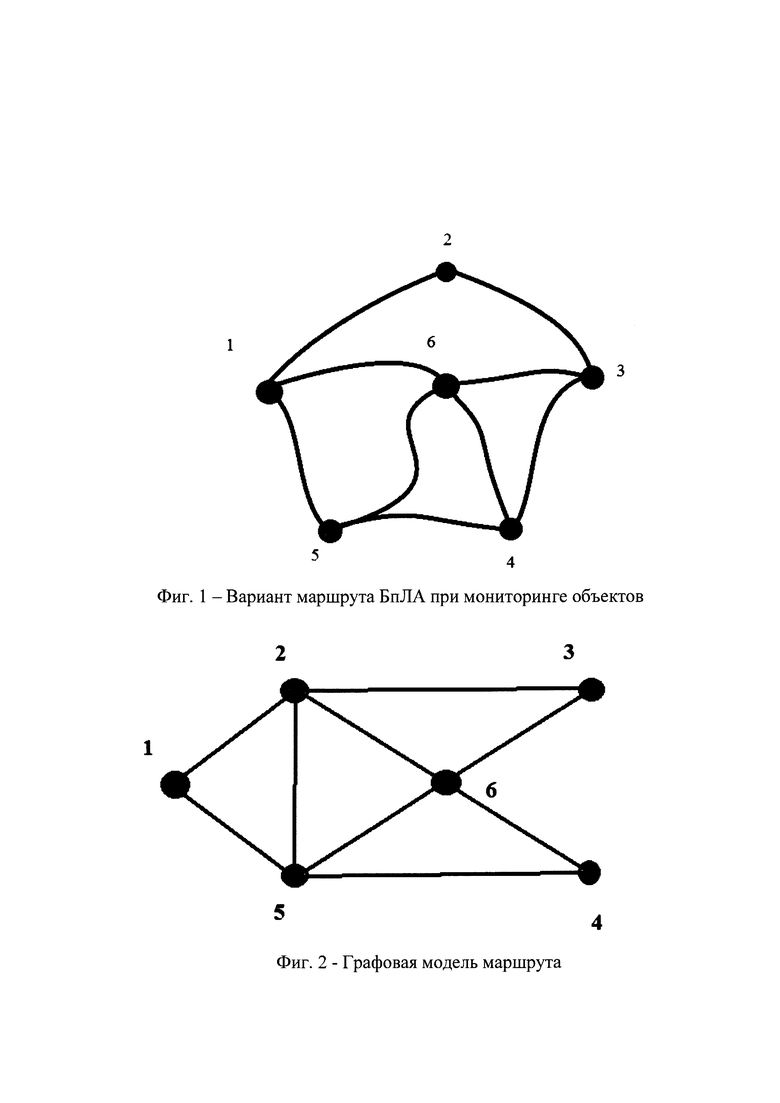
Полет группы БпЛА осуществляется по замкнутому маршруту, на котором оператором в произвольном порядке (в том числе из условий решения задачи мониторинга) выделены маршрутные точки, маршруты которых могут выделяться как на замкнутом контуре, так и внутри.
Пример маршрута приведен на фиг. 1.
На фиг. 1 приведен замкнутый контур, на котором выделены маршрутные точки: 1, 2, 3, 4, 5 - на периметре замкнутого контура; 6 - внутри замкнутого контура.
Графовая модель маршрута приведена на фиг. 2.
При организации полета n БпЛА ставится задача возврата каждого БпЛА, летящего по разным маршрутам, в исходную точку - вершину 1.
Ставится условие прохождения минимума расстояния в каждом маршруте полета.
Допускается однократное или неоднократное прохождение каждым БпЛА, осуществляющим полет по отдельному маршруту, всех маршрутных точек (вершин графа).
На графе (фиг. 2) может быть реализован Эйлеров граф: замкнутый маршрут на Эйлеровом графе проходит однократно по каждому ребру, а вершины может проходить неоднократно.
Для моделирования полета группы БпЛА была разработаны программы, реализованные в программных продуктах (Программа расчета замкнутого маршрута по графу реперных точек на местности //Свидетельство №2019610603; Программа расчета оптимального замкнутого маршрута по графу реперных точек на местности с помощью целой p-адической функции методом генетического алгоритма // Свидетельство №2019617021) [4, 5].
Техническим результатом предложенного способа является обеспечение непрерывности (в течение заданного времени) и упрощение мониторинга беспилотными летательными аппаратами критически важных малоразмерных объектов за счет использования БпЛА, в количестве большем, чем количество таких объектов, а также - за счет последовательных запусков БпЛА из состава группы, учитывающих время полета между маршрутными точками, время мониторинга БпЛА одной маршрутной точки, область мониторинга каждым БпЛА.
Использованные источники
1. Способ применения беспилотных летательных аппаратов и устройство управления (патент РФ №2457531, МПК G05D 1/00, опубл. 27.07.2012, бюл. №21).
2. Способ и устройство управления полетом группы летательных аппаратов (патент №2786276, МПК G08e 5/04; G05D 1/08, В64С 13/02, опубл. 19.12.2022, бюл. №35).
3. Способ траекторного управления группой БПЛА при мониторинге городской застройки (патент РФ №2765758, МПК G01R 31/00, опубл. 02.02.2024, бюл. №4).
4. Ефремов А.А., Дараган А.Д., Руденко Э.М., Аллилуева Н.В., Привалов М.И., Билера А.А. Программа расчета замкнутого маршрута по графу реперных точек на местности//Свидетельство №2019610603. Заявка №2018664931 от 21.12.2018 г. Зарегистрировано 14.01.2019 г.
5. Ефремов А.А., Дараган А.Д., Руденко Э.М., Аллилуева Н.В., Семикина Е.В., Привалов М.И., Билера А.А., Дараган Р.А. Программа расчета оптимального замкнутого маршрута по графу реперных точек на местности с помощью целой p-адической функции методом генетического алгоритма // Свидетельство №2019617021. Заявка №2019616008 от 24.05.2019 г. Зарегистрировано 03.06.2019 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ОБХОДА И ПРЕОДОЛЕНИЯ ОПАСНЫХ ЗОН БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2797956C1 |
| СПОСОБ МОНИТОРИНГА ТЕРРИТОРИИ С ПОМОЩЬЮ БПЛА | 2023 |
|
RU2828511C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА ГОРОДСКОЙ ЗАСТРОЙКИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2661269C2 |
| Способ определения усредненных значений метеорологических параметров в пограничном слое атмосферы | 2019 |
|
RU2727315C1 |
| СПОСОБ ДОСТАВКИ ГРУЗОВ ПРИ ПОМОЩИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2838710C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| СПОСОБ И СИСТЕМА ОБЕСПЕЧЕНИЯ ЗОНЫ ПОКРЫТИЯ РАДИОСВЯЗИ НА МАРШРУТАХ СЛЕДОВАНИЯ ИНКАССАТОРСКИХ ТРАНСПОРТНЫХ СРЕДСТВ С ПОМОЩЬЮ БПЛА | 2024 |
|
RU2838105C1 |
| СПОСОБ ДИСТАНЦИОННОЙ КОРРЕКЦИИ ПОЛЕТНОГО ЗАДАНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2755411C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
Изобретение относится к области беспилотной авиации, а именно к автоматизированным системам управления и контроля группы БПЛА с использованием систем искусственного интеллекта, конкретно - генетических алгоритмов расчета маршрутов мониторинга. Используют: задание высот полетов в соответствии с условиями выполняемой задачи; задание маршрутов полетов БПЛА в группе; задание допустимого расстояния между БПЛА из условий безопасности полета группы; задание векторов движения на маршруте полета группы БПЛА. Маршруты полетов БПЛА в группе реализуется по замкнутому контуру с выделением обязательных маршрутных точек. Задается постоянный результирующий вектор движения между двумя маршрутными точками, следующими друг за другом. Задаются интервалы времени между сменой маршрутных точек каждым БПЛА из условий безопасности полета группы БПЛА. Изменяется результирующий вектор движения для каждого БПЛА при прохождении маршрутной точки. Наряду с решением задач мониторинга реализация способа позволяет обеспечивать безопасность полета группы БПЛА в воздушном пространстве. 2 ил.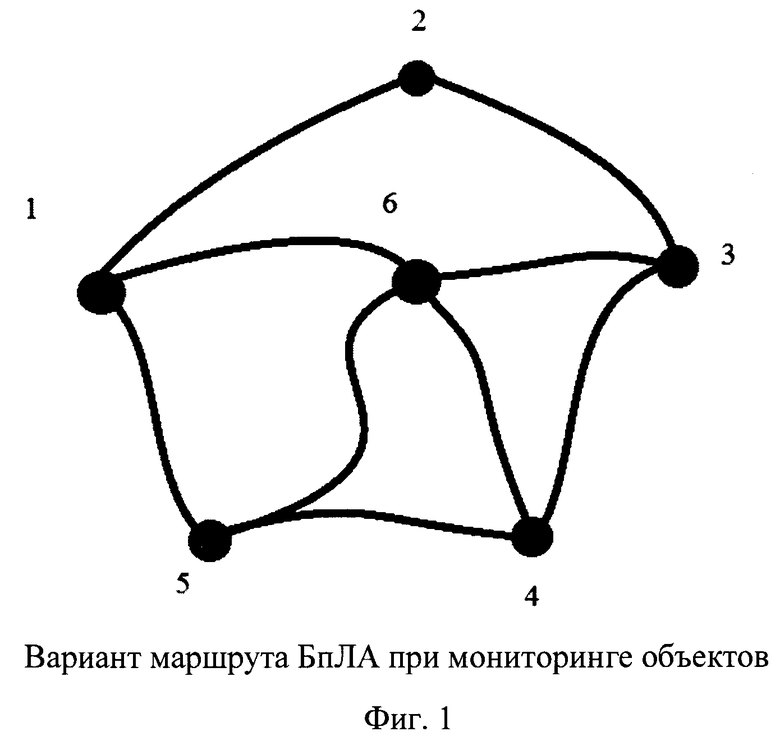
Способ непрерывного мониторинга критически важных объектов группой беспилотных летательных аппаратов (БпЛА) по замкнутому маршруту, использующий задание высот полетов в соответствии с условиями выполняемой задачи, задание маршрутов полетов БпЛА в группе, задание допустимого расстояния между БпЛА из условий безопасности полета группы, задание векторов движения на маршруте полета группы БпЛА, отличающийся тем, что маршруты полетов БпЛА в группе реализуется по замкнутому контуру с выделением обязательных маршрутных точек, задается постоянный результирующий вектор движения между двумя маршрутными точками, следующими друг за другом, задаются интервалы времени между сменой маршрутных точек каждым БпЛА из условий безопасности полета группы БпЛА, изменяется результирующий вектор движения для каждого БпЛА при прохождении маршрутной точки.
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МОНИТОРИНГЕ ГОРОДСКОЙ ЗАСТРОЙКИ | 2021 |
|
RU2765758C1 |
| Способ и устройство управления полетом группы летательных аппаратов | 2022 |
|
RU2786276C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| WO 2018166068 A1, 20.09.2018 | |||
| WO 2019213887 A1, 14.11.2019. | |||

