Изобретение относится к области воздухоплавательной техники и может быть использовано в качестве высотной платформы для построения радиорелейных линий связи, систем видеонаблюдения, транспортировки грузов, рекламных акций и т.д.
Наиболее близким по сути к заявленному устройству является устройство по патенту RU №2546027 от 10.04.2015 «ГИБРИДНЫЙ ДИРИЖАБЛЬ ЛИНЗООБРАЗНОЙ ФОРМЫ». Гибридный летательный аппарат состоит из внешней, наполняемой легким газом оболочки, внешнего силового кольца, внутренних силовых колец, центрального силового кольца, силовой установки, включающей вертикальную и горизонтальную тяги. Силовая установка содержит четыре энергетических узла, каждый из которых включает двигатель с воздушным винтом, создающим вертикальную тягу, и двигатель с воздушным винтом, создающим горизонтальную тягу, и устройства, обеспечивающие управление общим шагом лопастей, перекос лопастей и реверс тяги каждого воздушного винта. Все энергетические узлы расположены по внешней окружности кольца симметрично относительно его связанных осей X, Y, Z.
Гибридный дирижабль линзообразной формы предназначен для выполнения полетов с полезным грузом. Дирижабль относится к классу управляемых аэростатических летательных аппаратов, имеющих корпус в виде круглой двояковыпуклой симметричной или несимметричной линзы и жесткой конструкции. Аппарат снабжен силовой установкой, где в качестве движителей использованы воздушные винты, четыре из которых создают вертикальную тягу, а еще четыре - горизонтальную. Лопасти всех винтов имеют возможность изменения угла атаки. Полет аппарата осуществляется с использованием аэростатической подъемной силы легкого газа, находящегося в его корпусе, аэродинамической тяги воздушных винтов силовой установки, а также подъемной силы нагретого воздуха, заключенного наряду с легким газом в специальные термополости внутри корпуса аппарата. Аппарат не имеет аэродинамических поверхностей управления. Управление полетом выполняется с помощью изменения величины и направления тяги винтов силовой установки.
К недостаткам вышеназванного устройства можно отнести:
- большое аэродинамическое сопротивление аппарата при взлете и посадке и, как следствие, трудности в его управлении;
- сложность кинематических связей в канале вертикальной тяги на основе соосных вертолетных винтов снабженных механизмом управления общим шагом лопастей и автоматом перекоса, управлением величиной и направлением вектора тяги.
Предложенный летательный аппарат представляет собой гибридный вариант конструкции аэростата с оболочкой специальной формы и мультироторной платформы (дрона).
Задачей настоящего изобретения является расширение арсенала технических средств перемещения грузов летательными аппаратами легче воздуха.
Техническим результатом изобретения является конструкция аппарата, обладающего высокой маневренностью и грузоподъемностью, устойчивостью к ветровой нагрузке, возможностью находиться продолжительное время в заданной точке пространства без расхода электроэнергии (при отсутствии ветра).
Технический результат достигается тем, что гибридный летательный аппарат содержит оболочку с двигателями и воздушными винтами. Оболочка выполнена в форме тора и имеет внутренний жесткий каркас, при этом в центральном отверстии тора, перпендикулярно плоскости каркаса, закреплена Х-образная платформа, а также полезная нагрузка с источником питания, причем по меньшей мере четыре электродвигателя с воздушными винтами закреплены на краях платформы.
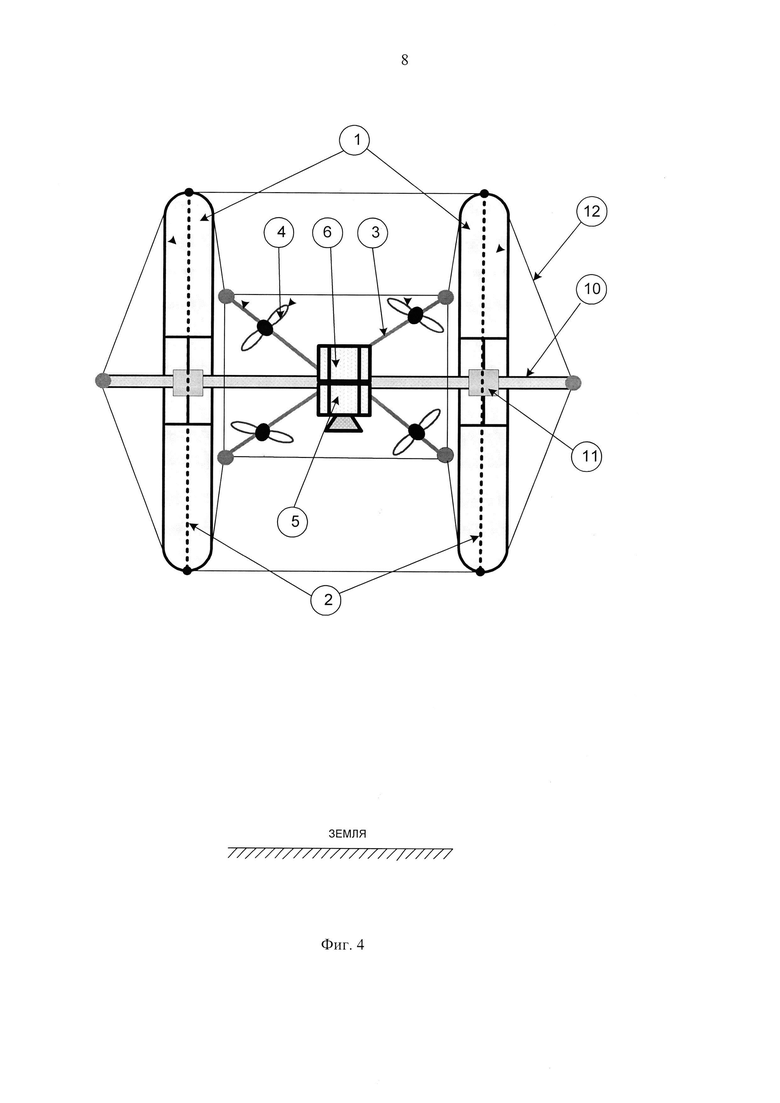
Аппарат может дополнительно содержать вторую оболочку, при этом оболочки соединены балкой и растяжками, а Х-образная платформа прикреплена к балке.
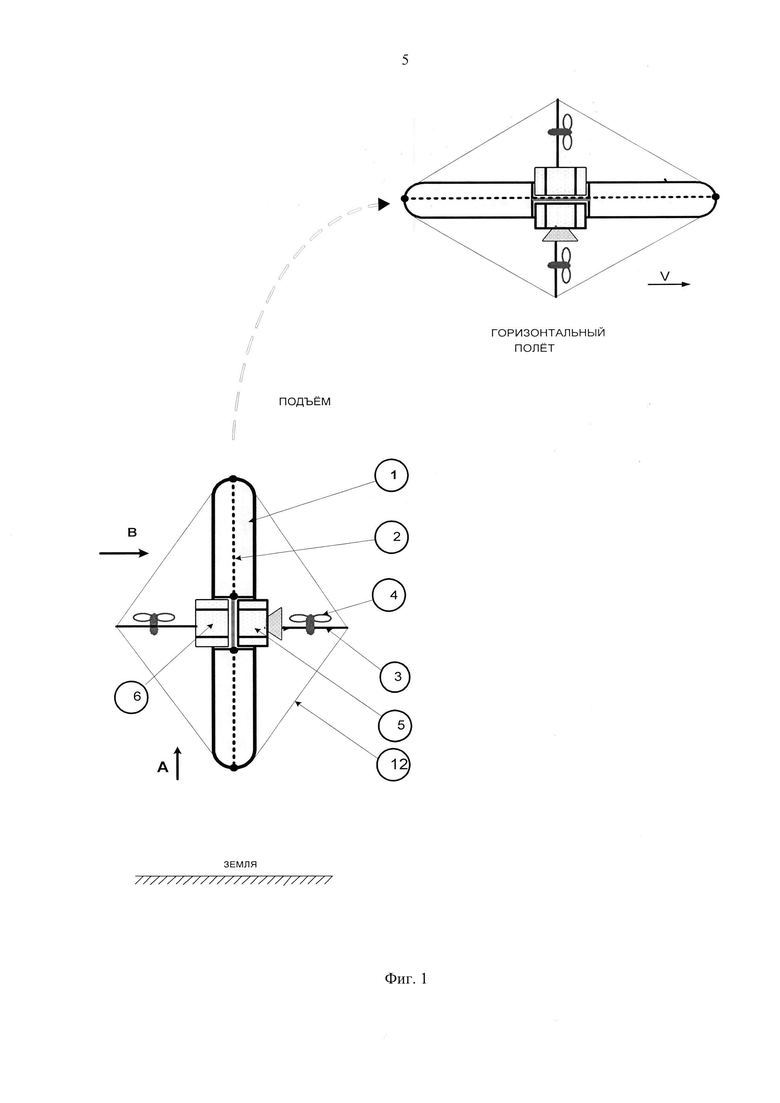
На Фиг. 1. Гибридный летательный аппарат с одной оболочкой. Схема подъема и горизонтального полета.
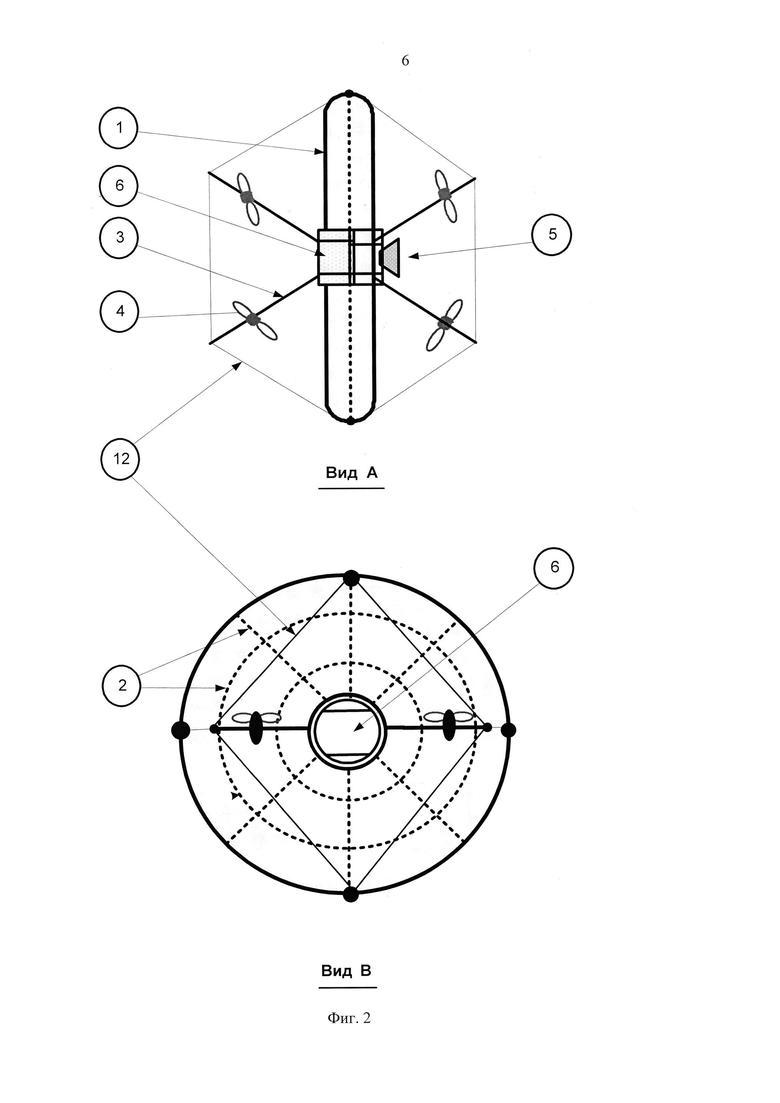
На Фиг. 2. Гибридный летательный аппарат с одной оболочкой. Вид снизу и сбоку.
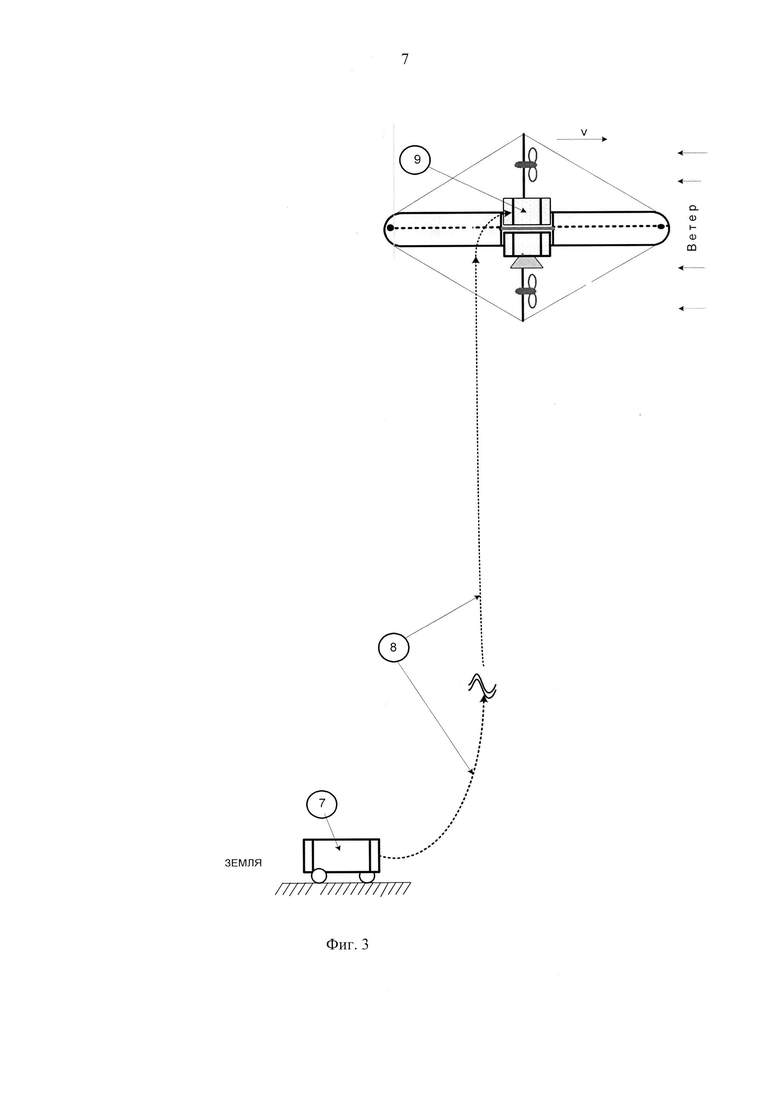
На Фиг 3. Гибридный летательный аппарат с одной оболочкой. Схема электропитания от наземного источника.
На Фиг. 4. Гибридный летательный аппарат с двумя оболочками.
Аппарат содержит одну или две заполняемые легким газом оболочки 1 в форме тора. Оболочки 1 могут быть соединены между собой балкой 10, установленной на узлах 11, и укреплены растяжками 12. Балка жестко связана с внутренним каркасом 2 оболочки, четыре электромотора 4 с воздушными винтами, размещенными на краях Х-образной платформы, 3 установлены в центральное отверстие оболочки перпендикулярно плоскости каркаса. Полезная нагрузка 5 и источник бортового питания 6 размещаются в центральном отверстии оболочки, либо используют наземный источник питания 7, подающий электроэнергию по кабель-тросу 8 на бортовой преобразователь 9.
Устройство работает следующим образом: оболочка, имеющая силовой каркас, размещается на земле и заполняется легким газом, например гелием. По мере заполнения форма оболочки принимает форму тора и при достижении состояния вывешивания процесс наполнения оболочки прекращается. В центральное отверстие устанавливают полезную нагрузку и бортовой источник питания, результатом чего является небольшая перегрузка аппарата по весу. Далее, управляя четырьмя электромоторами с винтами, установленными на Х-образной платформе, осуществляют вертикальный подъем аппарата на заданную высоту, при достижении которой плоскость оболочки устанавливается в горизонтальное положение. Управляя режимом электромоторов, осуществляют полет в заданном направлении. При наличии ветровой нагрузки рассчитывают необходимый курсовой вектор.
Устройство обладает следующими преимуществами:
- обладает повышенной мобильностью;
- обладает повышенной грузоподъемностью;
- может находиться продолжительное время в заданной точке пространства без расхода электроэнергии (при отсутствии ветра);
- устройство обладает устойчивостью к ветровой нагрузке.
Устройство может быть использовано в качестве высотной платформы для построения радиорелейных линий связи, систем видеонаблюдения, транспортировки грузов, рекламных акций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибридный дирижабль | 2024 |
|
RU2838500C1 |
| ВЕРТОСТАТ | 1993 |
|
RU2066661C1 |
| Воздухоплавательный аппарат | 2015 |
|
RU2612071C2 |
| ГИБРИДНЫЙ ДИРИЖАБЛЬ ЛИНЗООБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2546027C2 |
| АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2004 |
|
RU2239582C1 |
| ДИРИЖАБЕЛЬНАЯ МОДУЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2021 |
|
RU2787114C1 |
| Дирижабль для междугородних авиаперевозок различной дальности | 2021 |
|
RU2798583C1 |
| СПОСОБ УПРАВЛЕНИЯ, СТАБИЛИЗАЦИИ И СОЗДАНИЯ ДОПОЛНИТЕЛЬНОЙ ПОДЪЕМНОЙ СИЛЫ ДИРИЖАБЛЯ | 2013 |
|
RU2532448C1 |
| Устройство комплекса дирижабля-крана | 2022 |
|
RU2798252C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
Изобретение относится к области воздухоплавательной техники. Гибридный летательный аппарат содержит оболочку и двигатели с воздушными винтами. Оболочка выполнена в форме тора и имеет внутренний жесткий каркас, при этом в центральном отверстии тора, перпендикулярно плоскости каркаса, установлена Х-образная платформа с полезной нагрузкой и источником питания, причем по меньшей мере четыре электродвигателя с воздушными винтами закреплены на краях платформы. Изобретение направлено на повышение мобильности, грузоподъемности и устойчивости к ветровой нагрузке. 1 з.п. ф-лы, 4 ил.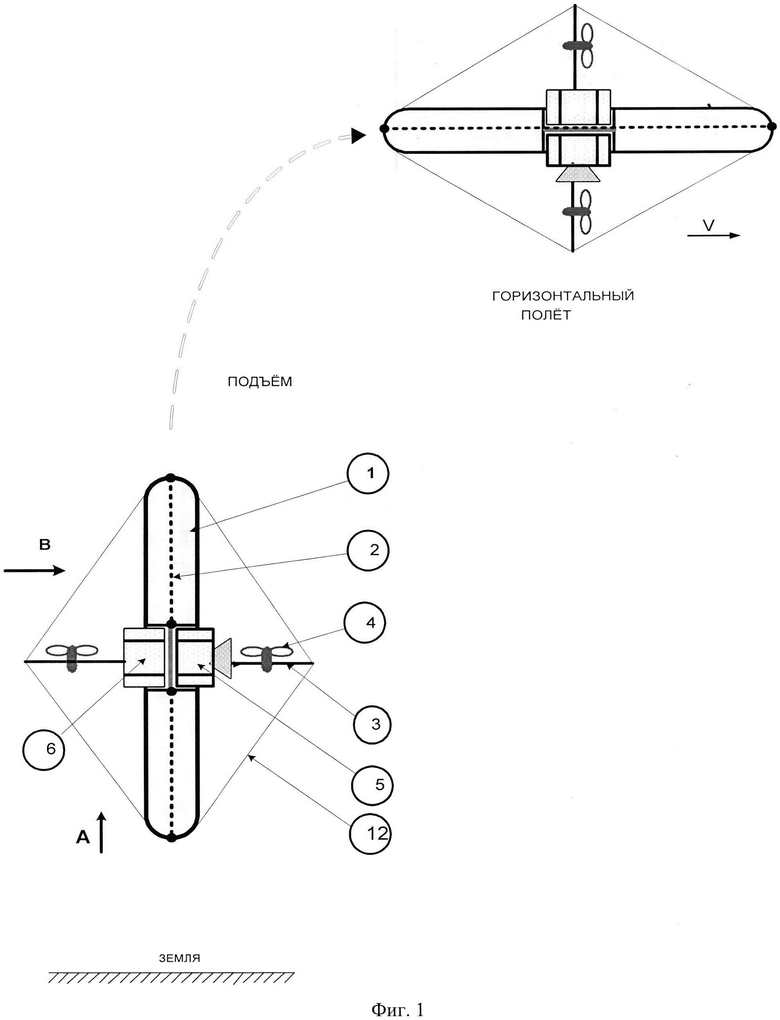
1. Гибридный летательный аппарат, содержащий оболочку и двигатели с воздушными винтами, отличающийся тем, что оболочка выполнена в форме тора и имеет внутренний жесткий каркас, при этом в центральное отверстие тора перпендикулярно плоскости каркаса установлена Х-образная платформа с полезной нагрузкой и источником питания, причем по меньшей мере четыре электродвигателя с воздушными винтами закреплены на краях платформы.
2. Аппарат по п. 1, отличающийся тем, что дополнительно содержит вторую оболочку, при этом оболочки соединены балкой с растяжками, а Х-образная платформа прикреплена к балке.
| ГИБРИДНЫЙ ДИРИЖАБЛЬ ЛИНЗООБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2546027C2 |
| DE 10023269 A1, 29.11.2001 | |||
| FR 2851224 A1, 20.08.2004. | |||

