Область техники, к которой относится изобретение.
Группа изобретений относится к голосовой коммуникации пользователей в подводных условиях и может быть использована для обеспечения эффективного способа помехоустойчивой речевой коммуникации дайверов и водолазов в подводных условиях на ближних и дальних расстояниях, совместимый с любым видом дайвингового и водолазного оборудования, а также данное изобретение можно использовать для общения с/между пловцами, фридайверами или людьми занимающимся сноркелингом. Система реализует предлагаемый способ.
Уровень техники системы.
Согласно первой из своих сторон, настоящее изобретение относится к системам для голосовой коммуникации пользователей в подводных условиях. Такая система описана, например, в патенте США на изобретение № US9767821B2, опубликованном в 2016 году.
Данная система является наиболее близкой по технической сути и достигаемому техническому результату и выбрана за прототип предлагаемого изобретения как системы.
Недостатком этого прототипа является невысокое качество связи, присутствие помех.
Раскрытие изобретения как системы.
Настоящее изобретение, главным образом, имеет целью предложить систему для голосовой коммуникации пользователей в подводных условиях, позволяющую, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно: обеспечить возможность улучшения качества связи за счет удаления фонового шума среды, шума дыхания и других помех, обеспечивая чистый и четко различимый речевой сигнал даже в сложных гидроакустических условиях, что и является решаемой поставленной задачей.
Для достижения этой цели система включает в себя множество подсистем пользователей, каждая из которых включает в себя
располагаемый в области гортани пользователя пьезокерамический преобразователь вибраций, герметизированный с помощью двухкомпонентного электроизоляционного полиуретанового компаунда, и соединенный с
располагаемым около уха пользователя подводным наушником, основанного на пьезокерамическом излучателе, герметизированного с помощью двухкомпонентного электроизоляционного полиуретанового компаунда, при этом
пьезокерамический преобразователь вибраций и подводный наушник соединены с располагаемым на пользователе герметичным корпусом, в котором расположен:
блок обработки сигналов, выполненный с возможностью обработки сигналов алгоритмами глубокого обучения для шумоподавления, кодирования речи в закодированную последовательность и обратной генерации голосового сигнала для воспроизведения ее получателю,
гидроакустический модем
Благодаря данным выгодным характеристикам появляется возможность обеспечить возможность улучшения качества связи за счет удаления фонового шума среды, шума дыхания и других помех, обеспечивая чистый и четко различимый речевой сигнал даже в сложных гидроакустических условиях.
Действительно, такая возможность обеспечивается тем, что используется пьезокерамический преобразователь вибраций, закрепленный на подложке из стеклотекстолита определённой формы и загерметизированного при помощи жидкой резины. Преобразователь расположен плотно у горла дайвера в области щитовидного хряща. При генерации дайвером голосового сигнала, колебания гортани повторяют его с более низкой амплитудой. Данные колебания считываются при помощи пьезокерамического преобразователя и преобразуются в электрический сигнал. Данное устройство по принципу работы схоже с устройством ларингофона (горлового микрофона), который применяется в авиации и охранной индустрии. Однако описанный способ специально адаптирован для подводного применения, за счет герметизации пьезокерамического преобразователя и использования специальной формы подложки, что позволяет без искажений считывать голосовой сигнал дайвера в нетипичных условиях под водой.
Стандартные методы считывания голосовых сигналов дайверов подвержены значительному влиянию звуков дыхания дайвера на качество считанного голосового сигнала. Это обусловлено расположением микрофона внутри полнолицевой маски дайвера, так как при дыхании потоки воздуха дополнительно колеблют мембрану микрофона, что существенно зашумляет полезный сигнал. Использование вышеупомянутых методов считывания сигнала невозможно без применения полнолицевых масок, так как они основаны на работе обычных микрофонных устройств для воздушной среды. Таким образом, предлагаемый метод считывания голосового сигнала не только не подвергает его шумам, связанных со звуками дыхания дайвера, но и обеспечивает возможность использования не только с полнолицевыми масками, но и с обычными регуляторами воздуха.
Дополнительно, предложенный способ кодирования, который реализует заявленная система, включает в себя комплекс алгоритмов преобразования зашумленного за счет влияния подводной среды голосового сигнала. Результатом преобразований является сжатый сигнал, содержащий полезную информацию. Способ кодирования устойчив к различным условиям подводной среды и уровням шума. Преобразование сигнала построено на дискретных алгоритмах обработки звука, а также на основе нейросетевых технологий.
Способ декодирования переданного сигнала представляет из себя преобразование сжатого сигнала, содержащего полезную информацию, в голосовой сигнал, содержащий ту же смысловую нагрузку, что и исходный сигнал, сгенерированный отправителем. Преобразование построено на основе нейросетевых технологий и в качестве результата предоставляет голосовой сигнал, близкий к человеческому, обеспечивая приближенность всей системы коммуникации к живому общению.
Алгоритмы кодирования и декодирования оптимизированы для использования на одноплатном компьютере в подводных условиях.
Существует вариант изобретения, в котором система дополнительно включает в себя надводную станцию, расположенную на границе водной среды, имеющую расположенный в подводном пространстве
гидроакустический модем, соединенный с
блоком обработки сигналов, выполненным с возможностью обработки сигналов алгоритмами глубокого обучения для шумоподавления, кодирования речи в закодированную последовательность и обратного раскодирования в текстовый или звуковой или графический вид информации для воспроизведения ее получателем, расположенным в надводном пространстве и включающим в себя
модуль обмена данных с оператором.
Благодаря данным выгодным характеристикам появляется возможность подключать к коммуникации также еще и пользователей, которые находятся над водой, например, операторов.
Уровень техники способа.
Другой своей стороной настоящее изобретение относится к способу голосовой коммуникации пользователей в подводных условиях.
Такой способ описан, например, в в патенте США на изобретение № US9767821B2, опубликованном в 2016 году.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения как способа.
Недостатком этого прототипа также является невысокое качество связи, присутствие помех.
Раскрытие изобретения как способа.
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ голосовой коммуникации пользователей в подводных условиях, позволяющий, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно: обеспечить возможность улучшения качества связи за счет удаления фонового шума среды, шума дыхания и других помех, обеспечивая чистый и четко различимый речевой сигнал даже в сложных гидроакустических условиях, что и является той же самой решаемой поставленной задачей.
Для достижения этой цели способ включает в себя следующие этапы:
располагают в области гортани пользователя пьезокерамический преобразователь вибраций,
получают голосовое сообщение указанного пользователя пьезокерамическим преобразователем вибраций и оцифровывают указанный сигнал,
очищают указанный цифровой сигнал от шумов блоком обработки сигналов, и им же преобразуют в закодированный сигнал,
передают указанный закодированный сигнал с помощью гидроакустического модема на гидроакустические модемы других пользователей, с кем производится коммуникация,
блоком обработки сигналов на основании закодированного сигнала заново создают аналоговый сигнал и передают его в подводный наушник.
Благодаря данным выгодным характеристикам появляется возможность обеспечить возможность улучшения качества связи за счет удаления фонового шума среды, шума дыхания и других помех, обеспечивая чистый и четко различимый речевой сигнал даже в сложных гидроакустических условиях. Применимы все те же подробные доводы, которые были изложены для системы.
Существует вариант изобретения, в котором предварительно обучают все блоки обработки сигналов алгоритмами глубокого обучения для шумоподавления, распознавания речи, преобразования ее в закодированный сигнал, и обратной генерации в голосовой сигнал и очищения от шума.
Благодаря данной выгодной характеристике появляется возможность конкретизации настройки работы блоков обработки сигналов.
Существует еще и такой вариант изобретения, в котором закодированный сигнал дополнительно передают на гидроакустический модем надводной станции, где его раскодируют для восприятия оператора.
Благодаря данным выгодным характеристикам появляется возможность подключать к коммуникации также еще и пользователей, которые находятся над водой, например, операторов.
Краткое описание чертежей.
Другие отличительные признаки и преимущества изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
- фигура 1 изображает функциональную схему системы для голосовой коммуникации пользователей в подводных условиях согласно изобретению,
- фигура 2 изображает электрическую схему питания указанной системы, согласно изобретению,
- фигура 3 изображает блок-схему сценария записи и передачи сигналов системы для голосовой коммуникации пользователей в подводных условиях, согласно изобретению,
- фигура 4 изображает блок-схему сценария приема и воспроизведения сигналов системы для голосовой коммуникации пользователей в подводных условиях, согласно изобретению,
- фигура 5 изображает пример реализации способа голосовой коммуникации пользователей в подводных условиях, вариант «дайвер-дайвер» прямая передача информации, согласно изобретению,
- фигура 6 изображает пример реализации способа голосовой коммуникации пользователей в подводных условиях, вариант «дайвер-дайвер», обратная передача информации, согласно изобретению,
- фигура 7 изображает пример реализации способа голосовой коммуникации пользователей в подводных условиях, вариант «дайвер-надводная станция», прямая передача информации, согласно изобретению,
- фигура 8 изображает пример реализации способа голосовой коммуникации пользователей в подводных условиях, вариант «дайвер-надводная станция», обратная передача информации, согласно изобретению,
- фигура 9 изображает пример реализации способа голосовой коммуникации пользователей в подводных условиях, вариант «Дайвер – надводная станция и дайвер», согласно изобретению,
- фигура 10 изображает пример реализации способа голосовой коммуникации пользователей в подводных условиях, вариант «Дайвер- множество дайверов», согласно изобретению,
- фигура 11 изображает пример реализации способа голосовой коммуникации пользователей в подводных условиях, вариант «Надводная станция – множество дайверов», прямая передача информации, согласно изобретению,
- фигура 12 изображает пример реализации способа голосовой коммуникации пользователей в подводных условиях, вариант «Надводная станция – множество дайверов», обратная передача информации, согласно изобретению.
На фигурах обозначено:
1 –дайвер,
2 - пьезокерамический преобразователь вибраций дайвера,
3 – подводный наушник дайвера,
4 – герметичный корпус дайвера,
5 – гидроакустический модем дайвера,
6 – ремень дайвера,
7 – баллон дайвера,
8 – легочный автомат дайвера,
9 – шланг дайвера,
10 – подводная маска дайвера,
11 – проводные соединения дайвера,
12 – компоненты режима передачи сигнала
13 - операционный усилитель
14 – аудиокарта
15 – одноплатный компьютер
16 – программное обеспечение режима передачи сигнала,
17 – модуль считывания сигнала,
18 – модуль динамиеского шумоподавления,
19 – модуль кодера компрессии,
20 – программное обеспечение режима приема сигнала,
21 – модуль генерации сигнала,
22 – модуль кодера компрессии,
23 - компоненты режима приема сигнала,
24 – усилитель звука,
25 – аккумулятор,
26 – DС/DС преобразователь,
27-1 – подсистема первого дайвера,
27-2 – подсистема второго дайвера,
28 – надводная станция,
29 – программное обеспечение (второй индекс означает, что 1- относится к первому дайверу, 2 – ко второму дайверу, 3 – к надводной станции)
30 – выборочные аппаратные компоненты (второй индекс означает, что 1- относится к первому дайверу, 2 – ко второму дайверу, 3 – к надводной станции),
31 – интерфейс взаимодействия с оператором,
32 – надводное пространство,
33 – граница воды,
34 – подводное пространство,
Цифрами 40-72 обозначены сигналы, которые передаются с ранее указанных устройств и блоков и далее поясняются по тексту.
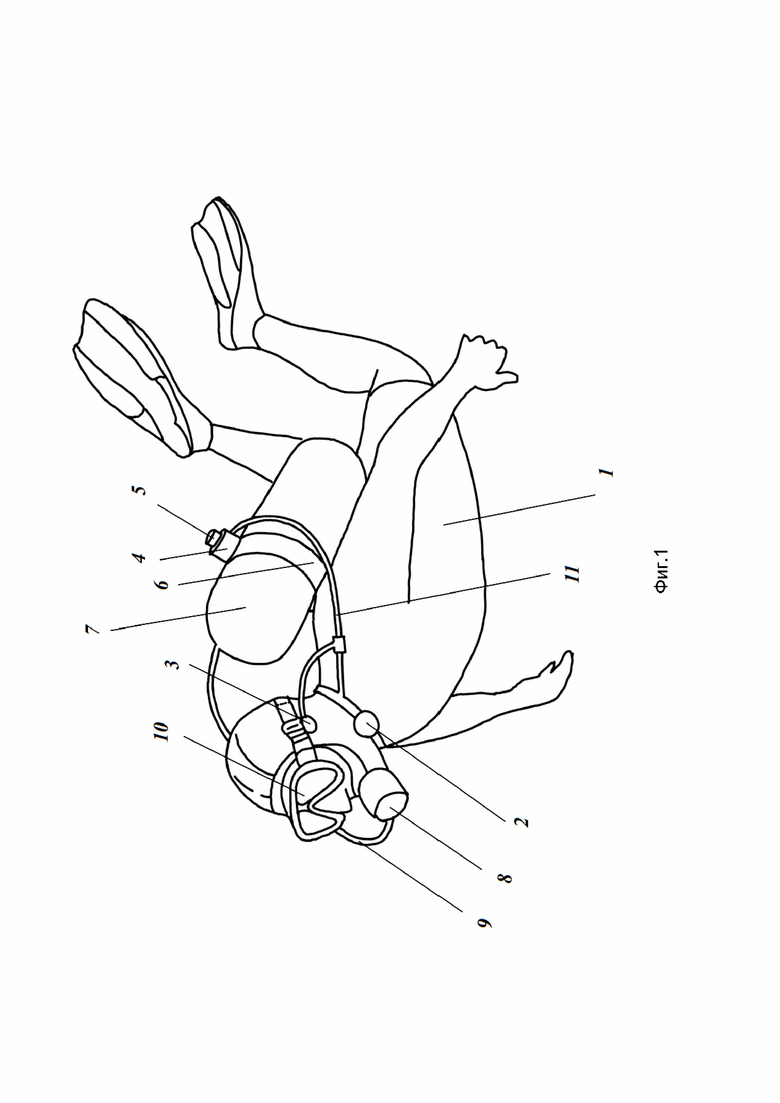
Согласно фигуре 1 дайвер (1) находится под водой. Компоненты его устройства включают в себя пьезокерамический преобразователь вибраций (2), подводный наушник (3), а также герметичный корпус (4) с расположенным на нем гидроакустическим модемом (5).
Пьезокерамический преобразователь вибраций (2) крепится на ремешке, охватывающем шею дайвера (1), и располагается на малом расстоянии сбоку от центра гортани дайвера (1). Подводный наушник (3) располагается у уха дайвера (1) и закрепляется при помощи зажима на подводную маску (10).
Гидроакустический модем (5) жестко закреплен на корпусе (4) с электронными компонентами системы, который крепится при помощи ремня (6) на баллон (7). Корпус (4) с электронными компонентами соединен с пьезокерамическим преобразователем вибраций (2) и подводным наушником (3) при помощи проводных соединений (11).
Дайвер (1) дышит при помощи легочного автомата (8), соединенного при помощи шланга (9) с баллоном (7).
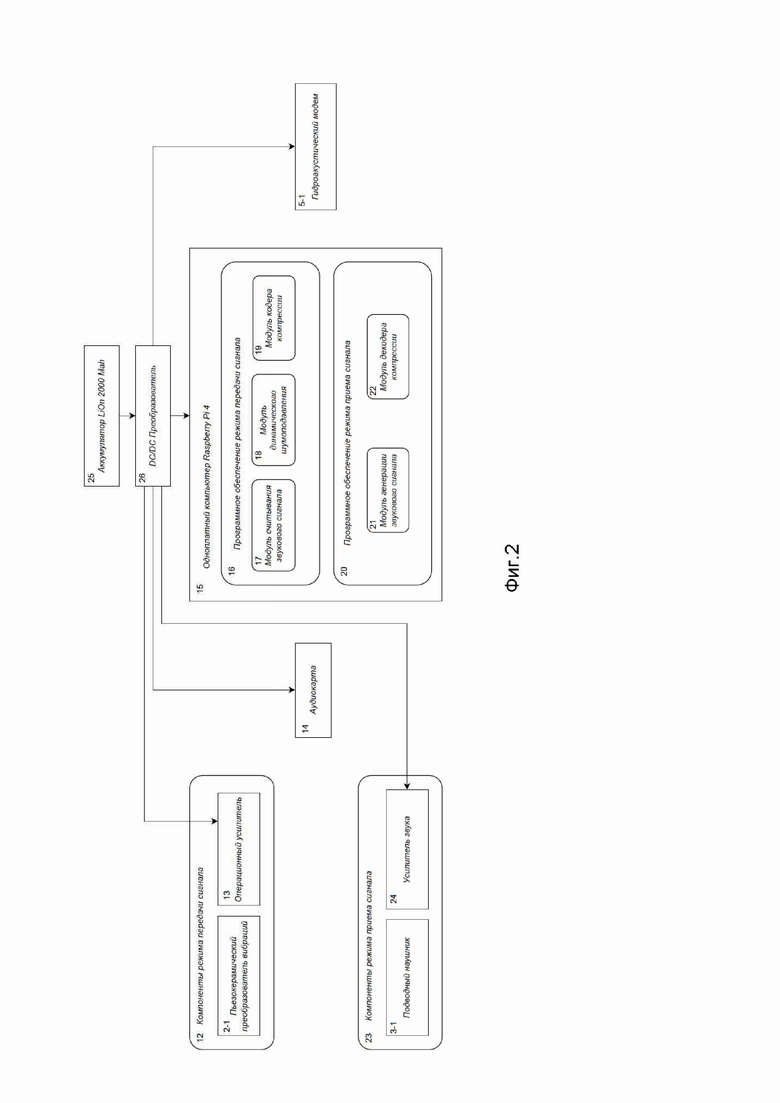
На фигуре 2 представлена электрическая схема питания устройства. Источником электрической энергии в устройстве является литий-ионная аккумуляторная батарея с емкостью 2000 мАч и номинальным напряжением 3.7 В. Для всех электронных компонентов в устройстве необходимо напряжение 5 В, поэтому ток с аккумуляторной батареи поступает на DC/DC преобразователь, который повышает напряжение до 5 В. DC/DC преобразователь питает остальные компоненты устройства, а именно аудиокарту, операционный усилитель, усилитель звука, одноплатный компьютер Raspberry Pi CM4 и гидроакустический модем.
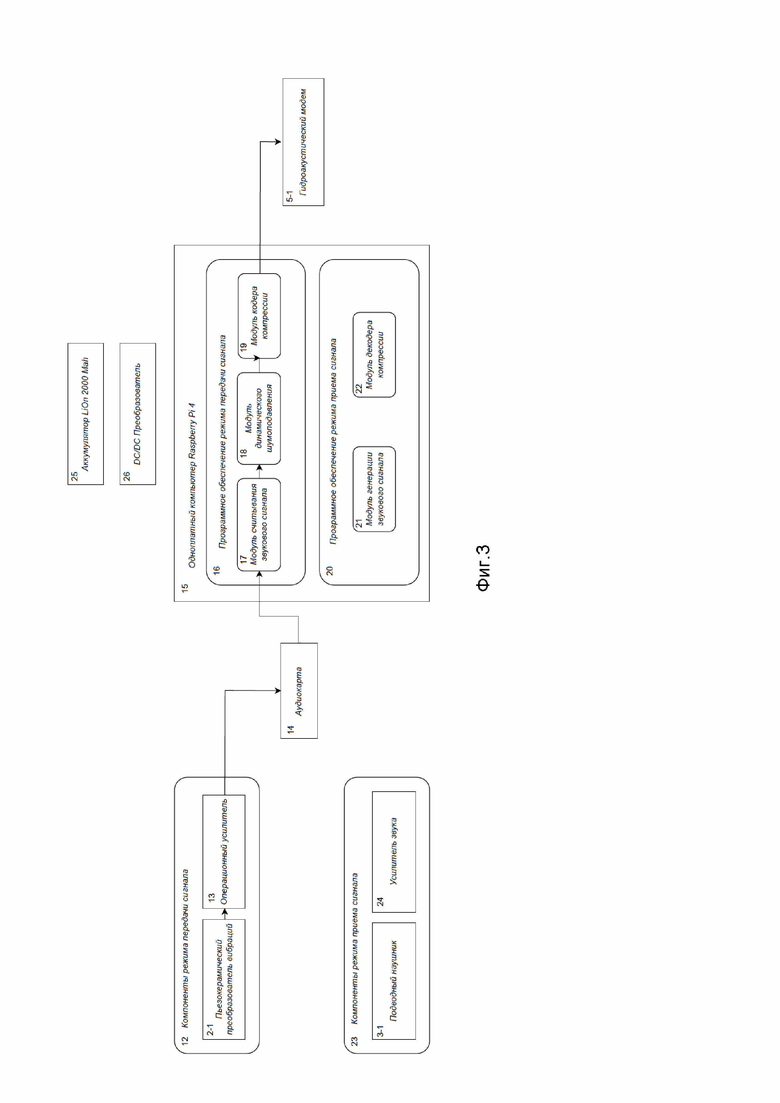
На фигуре 3 представлен сценарий записи и передачи речевого сигнала. Пьезокерамический преобразователь вибраций (2-1) преобразует механические вибрации в низкоамплитудный электрический сигнал. Далее сигнал поступает на специализированный операционный усилитель (13), который увеличивает амплитуду входного сигнала, не добавляя к нему дополнительного шума. После этого аналоговый сигнал поступает на аудиокарту (14), где оцифровывается. Далее по интерфейсу USB цифровой сигнал передается на одноплатный компьютер (15) Raspberry Pi CM4, где программное обеспечение кодирует сигнал, который по цифровому интерфейсу UART передается на гидроакустический модем (5-1).
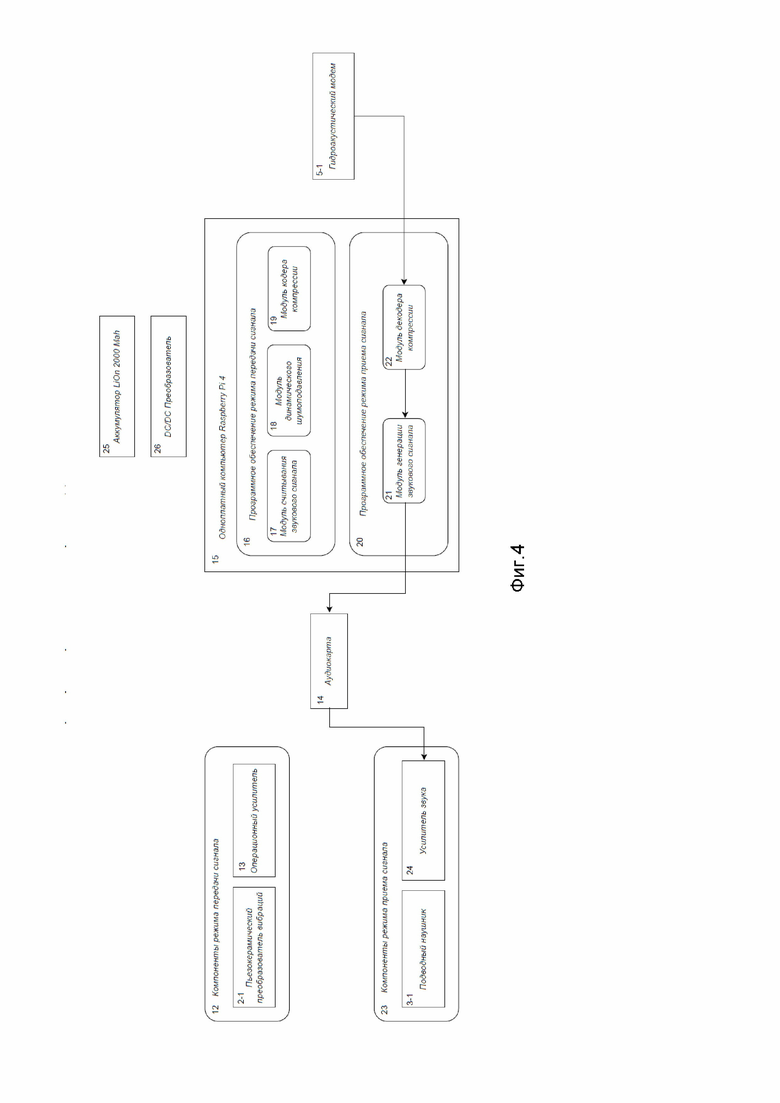
На фигуре 4 представлен сценарий приема и воспроизведения. Гидроакустический модем (5-1), который принял сигнал, передает его по UART одноплатному компьютеру (15) Raspberry Pi CM4. Далее сигнал проходит программную обработку, а именно декодируется и преобразовывается в аудиосигнал. Результат поступает на аудиокарту (14) через интерфейс USB. Аудиокарта (14) преобразует цифровой сигнал в аналоговый, после чего он поступает на усилитель звука (24) для усиления до 30 В. Результат обработки поступает на подводный наушник (3-1), где реализуется преобразование электрического сигнала в механический, который, в свою очередь, передает вибрации водной среде.
Осуществление изобретения.
Система для голосовой коммуникации пользователей в подводных условиях работает следующим образом.
Этап 1. Располагают в области гортани пользователя (1) пьезокерамический преобразователь вибраций (2).
Этап 2. Получают голосовое сообщение указанного пользователя пьезокерамическим преобразователем вибраций (2) и оцифровывают указанный сигнал.
Этап 3. Очищают указанный цифровой сигнал от шумов блоком обработки сигналов, и им же преобразуют в закодированный сигнал. При этом предварительно обучают все блоки обработки сигналов алгоритмами глубокого обучения для шумоподавления, распознавания речи, преобразования ее в закодированный сигнал, и обратной генерации в голосовой сигнал и очищения от шума.
Этап 4. Передают указанный закодированный сигнал с помощью гидроакустического модема (5) на гидроакустические модемы других пользователей, с кем производится коммуникация.
Этап 5. Блоком обработки сигналов на основании закодированного сигнала заново создают аналоговый сигнал и передают его в подводный наушник. Именно потому что сигнал синтезирован заново по сути из текстового сообщения, то он не содержит никаких посторонних шумов, помех, является максимально чистым для восприятия.
Для воспроизведения принятого и декодированного голосового сигнала используется подводный наушник (3). Подводный наушник (3) состоит из пьезокерамического излучателя, закреплённого на подложке из стеклотекстолита и загерметизированного за счет поверхностного нанесения двухкомпонентного полиуретанового компаунда слоем в 2-5 мм. Устройство располагается возле ушной раковины дайвера.
При подаче электрического сигнала на данный излучатель амплитудой до 30 В, он преобразуется в водной среде в гидроакустический, который дайвер будет способен улавливать своим ухом. Тем самым реализован бюджетный метод воспроизведения акустического сигнала дайверу в подводных условиях, без необходимости эксплуатации дорогостоящего костного наушника.
Также вышеупомянутые наушники проблематично герметизировать и небезопасно использовать под водой из-за возможного создания большого перепада давления между ушной перепонкой и подводной средой. Также за счет учета амплитудно-частотной характеристики разработанного наушника, достигается высокое качество звука.
Примеры изобретения.
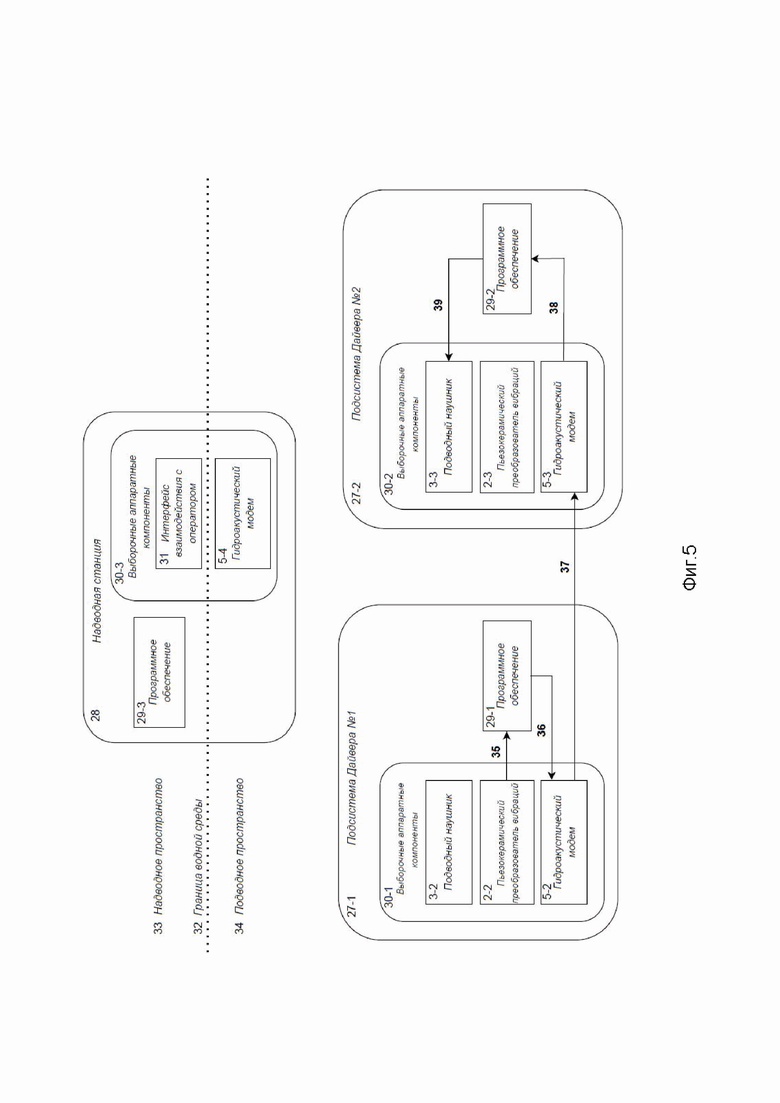
Пример 1 Сценарий коммуникации системы вида «Дайвер – дайвер». Прямая передача информации. См. фигуру 5.
Основные рассматриваемые далее элементы функционирования системы коммуникации обозначены на фиг. 5 как подсистема первого дайвера (27-1) , подсистема второго дайвера (27-2) и надводная станция (28). Подсистема первого дайвера (27-1) и подсистема второго дайвера (27-2) находятся под границей водной среды (32) в подводном пространстве (34), а надводная станция (28) находится над границей водной среды (32) в надводной среде (33). Подсистема первого дайвера (27-1) и подсистема второго дайвера (27-2) представляют из себя выборочный набор программно-аппаратной части устройства, расположенного на каждом из дайверов. Надводная станция (28) обозначает надводную систему с выходом в подводное пространство (33) для мониторинга и взаимодействия с дайверами, расположенными в подводном пространстве (34).
Подсистема первого дайвера (27-1) и подсистема второго дайвера (27-2) и надводная станция (28) имеют схожую структуру и включают в себя блоки программного обеспечения (29-1, 29-2, 29-3) и выборочных аппаратных компонентов (30-1, 30-2, 30-3)
Блок обработки сигналов, включающий программное обеспечение, представляет собой набор разработанных алгоритмов обработки данных, которые поступают из элементов выборочных аппаратных компонентов. Результаты обработки данных поступают обратно в блок выборочных аппаратных компонентов для дальнейшего функционирования системы.
В состав блоков выборочных аппаратных компонентов входят подводный наушник, пьезокерамический преобразователь вибраций и гидроакустический модем, являющиеся элементами аппаратной части устройства дайвера и необходимые для качественного описания функционирования системы.
В состав выборочных аппаратных компонентов (30-3) надводной станции (28) входят блоки интерфейса взаимодействия с оператором (31) и гидроакустический модем (5-4). Интерфейс взаимодействия с оператором необходим для сообщения с оператором и получения обратной связи оператора при коммуникации с частями системы, находящимися в подводном пространстве (34) и может быть реализован как дисплей монитора с клавиатурой/микрофоном/набором кнопок, как динамик с клавиатурой/микрофоном/набором кнопок, как сенсорный экран с клавиатурой/микрофоном/набором кнопок, а также может быть реализована система интерфейса, состоящая из нескольких описанных компонентов в смешанной конфигурации. Гидроакустический модем (5-4) находится в подводном пространстве (34), остальные части блока надводной станции расположены в надводном пространстве (33).
На Фиг. 5 представлен сценарий прямой передачи информации от одного дайвера другому посредством схематического представления взаимодействия блоков подсистемы первого дайвера (27-1) и подсистемы второго дайвера (27-2). Процесс начинается с поступления (35) сигнала, считанного с гортани дайвера при помощи пьезокерамического преобразователя вибраций (2-2), в блок программного обеспечения (29-1) для обработки полученных данных. Результат работы программного обеспечения (29-1) поступает (36) на вход гидроакустического модема (5-2).
Сообщение между гидроакустическим модемом (5-2) подсистемы первого дайвера (27-1) и гидроакустическим модемом (5-3) подсистемы второго дайвера (27-2) происходит (37) по гидроакустическому каналу. Полученный при помощи гидроакустического модема (5-3) сигнал поступает (38) в блок программного обеспечения (29-2), в котором происходит его обработка и преобразование в голосовой сигнал. Результат работы блока программного обеспечения (29-2) поступает (39) на блок подводного наушника (3-3), при помощи которого реализуется озвучивание голосовой информации пользователю подсистемы второго дайвера (27-2) .
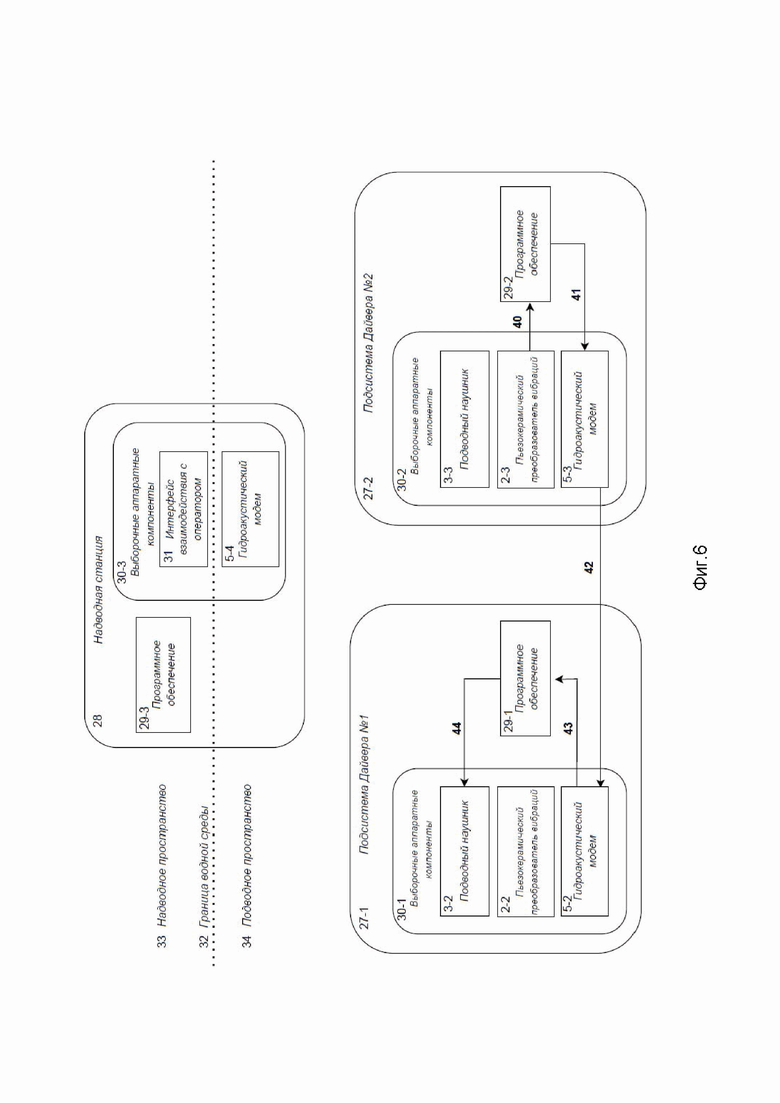
Пример 2. Сценарий коммуникации системы вида «Дайвер – дайвер». Обратная передача информации. См. фигуру 6.
На фиг. 6 представлен сценарий обратной передачи информации от одного дайвера другому посредством схематического представления взаимодействия блоков подсистемы второго дайвера (27-2) и подсистемы первого дайвера (27-1). Процесс начинается с поступления (40) сигнала, считанного с гортани дайвера при помощи пьезокерамического преобразователя вибраций (2-3), в блок программного обеспечения (29-2) для обработки полученных данных. Результат работы программного обеспечения (29-2) поступает (41) на вход гидроакустического модема (5-3). Сообщение между гидроакустическим модемом (5-3) подсистемы второго дайвера (27-2) и гидроакустическим модемом (5-2) подсистемы первого дайвера (27-1) происходит (42) по гидроакустическому каналу. Полученный при помощи гидроакустического модема (5-2) сигнал поступает (43) в блок программного обеспечения (29-1), в котором происходит его обработка и преобразование в голосовой сигнал. Результат работы блока программного обеспечения (29-1) поступает (44) на блок подводного наушника (3-2), при помощи которого реализуется озвучивание голосовой информации пользователю подсистемы первого дайвера (27-1) .
Прямая и обратная передача информации (фиг. 5 и фиг. 6) реализована в полудуплексном режиме.
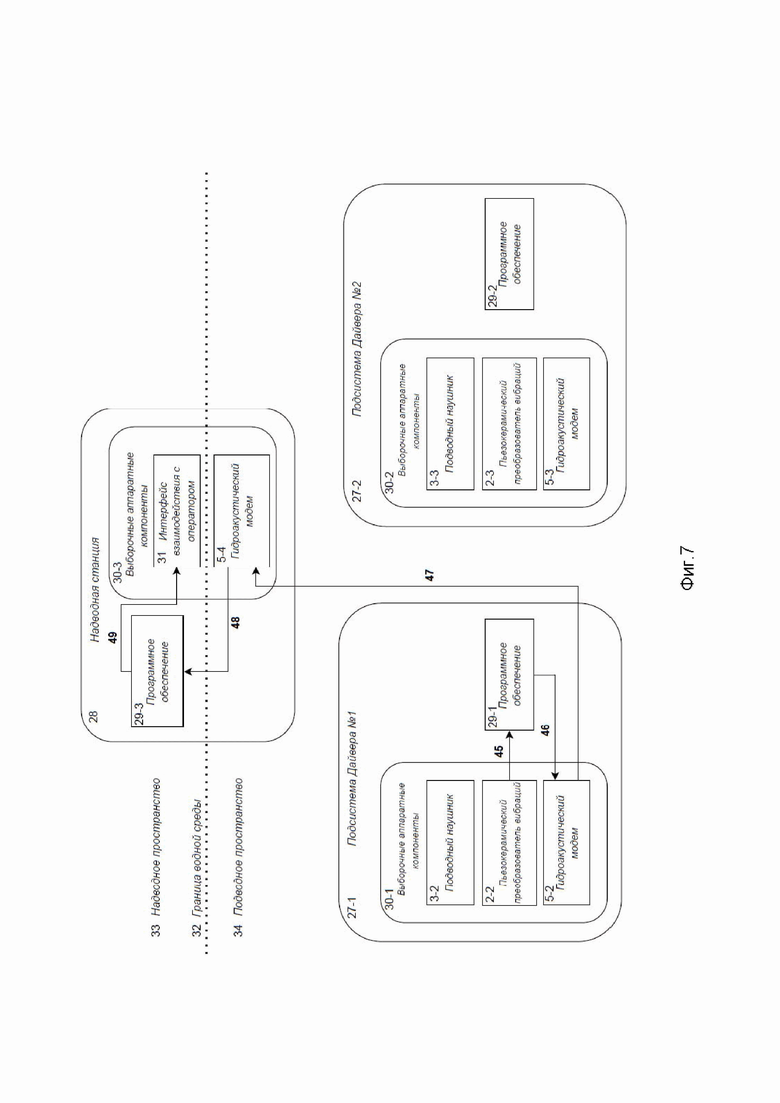
Пример 3. Сценарий коммуникации системы вида «Дайвер-надводная станция». Прямая передача информации. См. фигуру 7.
На фиг. 7 представлен сценарий прямой передачи информации от первого дайвера оператору посредством схематического представления взаимодействия блоков подсистемы первого дайвера (27-1) и надводной станции (28). Процесс начинается с поступления (45) сигнала, считанного с гортани дайвера при помощи пьезокерамического преобразователя вибраций (2-2), в блок программного обеспечения (29-1) для обработки полученных данных. Результат работы программного обеспечения поступает (46) на вход гидроакустического модема (5-2). Сообщение между гидроакустическим модемом (5-2) подсистемы первого дайвера (27-1) и гидроакустическим модемом (5-4) надводной станции (28) происходит (47) по гидроакустическому каналу.
Полученный при помощи гидроакустического модема (5-4) сигнал поступает (48) в блок программного обеспечения (29-3), в котором происходит его обработка и преобразование в сигнал того вида, который требует реализованный вид интерфейса взаимодействия с оператором (31). Результат работы блока программного обеспечения (29-3) поступает (49) на блок интерфейса взаимодействия с оператором (31), при помощи которого в дальнейшем реализуется обратная связь со стороны оператора на поступивший сигнал от подсистемы первого дайвера (27-1).
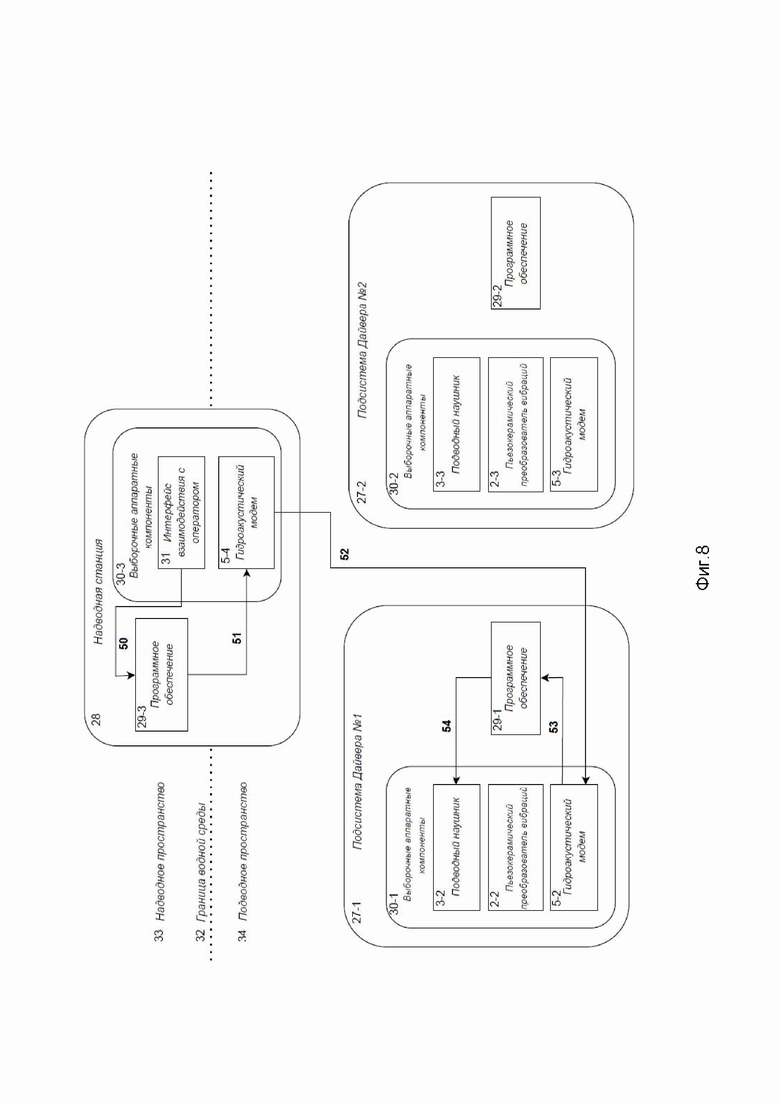
Пример 4. Сценарий коммуникации системы вида Станция – Дайвер. Обратная передача информации. См. фигуру 8.
На фиг. 8 представлен сценарий обратной передачи информации от оператора первому дайверу посредством схематического представления взаимодействия блоков надводной станции (3) и подсистемы первого дайвера (27-1). Процесс начинается с поступления (50) сигнала обратной связи оператора, считанный при помощи интерфейса взаимодействия с оператором (31) в блок программного обеспечения (29-3). Результат работы блока программного обеспечения (29-3) поступает (51) на вход гидроакустического модема (5-4).
Сообщение между гидроакустическим модемом (5-4) надводной станции (28) и гидроакустическим модемом (5-2) подсистемы первого дайвера (27-1) происходит (52) по гидроакустическому каналу. Полученный при помощи гидроакустического модема (5-2) сигнал поступает (53) в блок программного обеспечения (29-1), в котором происходит его обработка и преобразование в голосовой сигнал. Результат работы блока программного обеспечения (29-1) поступает (54) на блок подводного наушника (3-2), при помощи которого реализуется озвучивание голосовой информации пользователю подсистемы первого дайвера (27-1) .
Прямая и обратная передача информации (фиг. 7 и фиг.8) реализована в полудуплексном режиме.
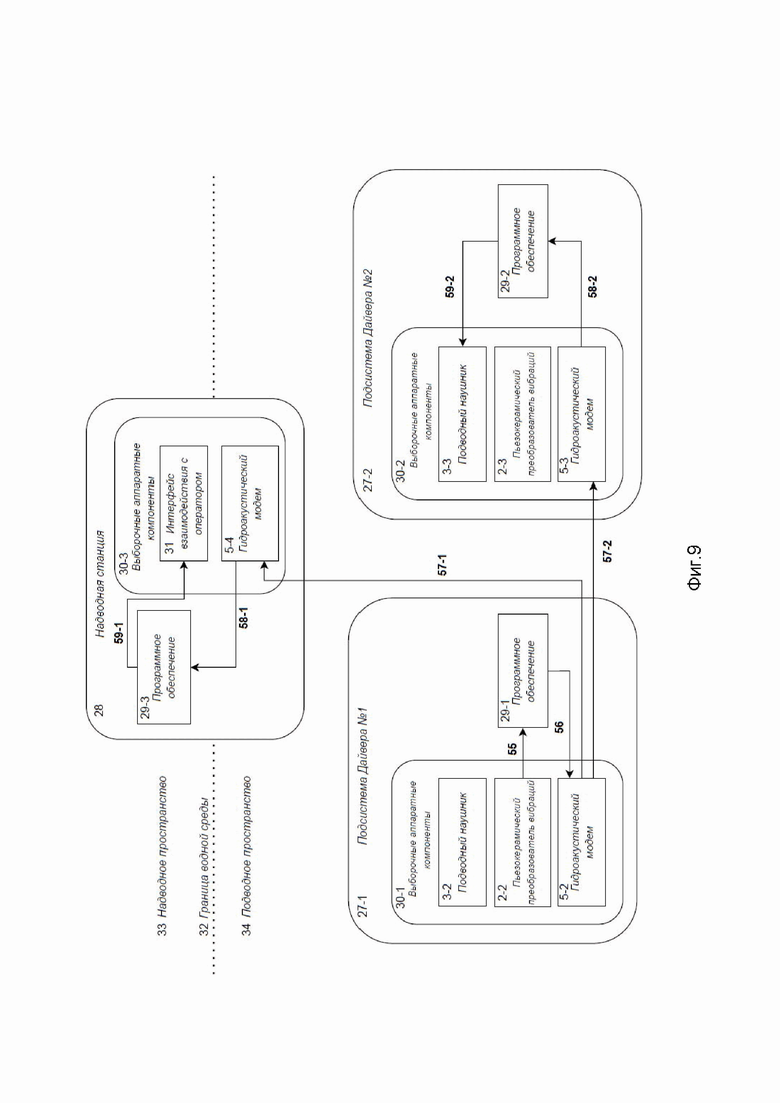
Пример 5. Сценарий коммуникации системы вида «Дайвер – надводная станция и другой дайвер». См. фигуру 9.
На фиг. 9 представлен сценарий переключения режима передачи информации от подсистемы первого дайвера (27-1) либо к надводной станции (28), либо к подсистеме второго дайвера (27-2) посредством схематического представления взаимодействия этих блоков.
Процесс начинается с поступления (55) сигнала, считанного с гортани первого дайвера при помощи пьезокерамического преобразователя вибраций (2-2), в блок программного обеспечения (29-1) для обработки полученных данных. Результат работы программного обеспечения (29-1) поступает (56) на вход гидроакустического модема (5-2). Пользователь подсистемы первого дайвера (29-1) может выбрать получателя, в качестве которого может выступать либо надводная станция (28), либо подсистема второго дайвера (27-2).
Сообщение между гидроакустическим модемом (5-2) подсистемы первого дайвера (27-1) и гидроакустическим модемом (5-3) подсистемы второго дайвера (27-2) или гидроакустическим модемом (5-4) надводной станции (28) происходит (57-1, 57-2) по гидроакустическому каналу.
Полученный при помощи гидроакустического модема (5-3 или 5-4) сигнал поступает (58-1, 58-2) в блок программного обеспечения (29-2 или 29-3), в котором происходит его обработка. В блоке программного обеспечения системы второго дайвера (29-2) сигнал преобразовывается в голосовой сигнал и поступает (59-2) на блок подводного наушника (3-3), при помощи которого реализуется озвучивание голосовой информации пользователю подсистемы второго дайвера (27-2).
В блоке программного обеспечения (29-3) происходит обработка и преобразование полученного сигнала в сигнал того вида, который требует реализованный вид интерфейса взаимодействия с оператором (31). Результат работы блока программного обеспечения (29-3) поступает (59-1) на блок интерфейса взаимодействия с оператором (31), при помощи которого в дальнейшем реализуется обратная связь со стороны оператора на поступивший сигнал от подсистемы первого дайвера (27-1).
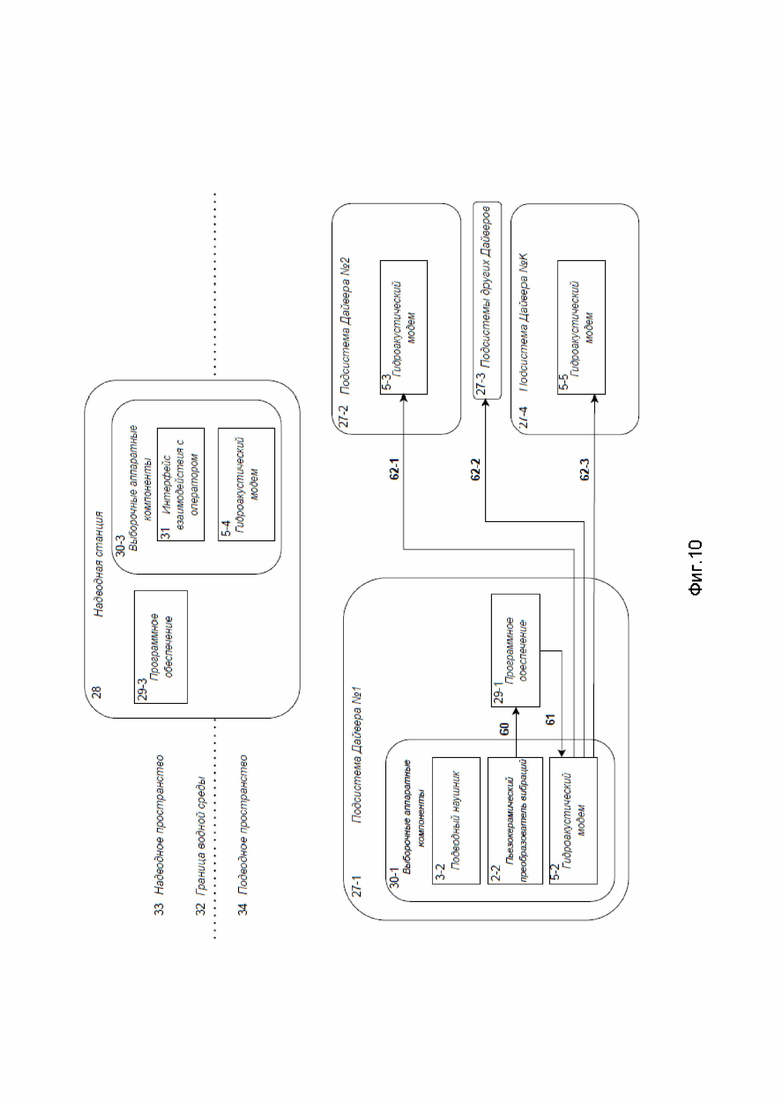
Пример 5. Сценарий коммуникации системы вида «Дайвер – множество дайверов». См. фигуру 10.
На фиг. 10 представлен сценарий передачи информации от одного дайвера нескольким посредством схематического представления взаимодействия блоков подсистемы первого дайвера (27-1), подсистемы второго дайвера (27-2), подсистемы дайвера №К (27-4) и подсистем других дайверов (27-3).
Подсистема второго дайвера (27-2) и подсистема дайвера №К (27-4) включает в себя единственные компоненты – гидроакустические модемы (5-3, 5-5), необходимые для иллюстрации данного режима работы системы.
Блок подсистемы других дайверов (27-3) является обобщающим, т.е. в него могут входить несколько блоков. Верхняя граница количества всех блоков может быть равна двадцати пяти и может быть обоснована техническим пределом количества участников в сети модемов.
Процесс начинается с поступления (60) сигнала, считанного с гортани первого дайвера при помощи пьезокерамического преобразователя вибраций (2-2), в блок программного обеспечения (29-1) для обработки полученных данных. Результат работы программного обеспечения (29-1) поступает (61) на вход гидроакустического модема (5-2). Сообщения передаются по гидроакустическому каналу от гидроакустического модема (5-2) к гидроакустическим модемам (5-3, 5-5) блоков подсистемы второго дайвера (27-2), подсистемы дайвера №К (27-4), а также к гидроакустическим модемам аналогичных подсистем других дайверов (27-3).
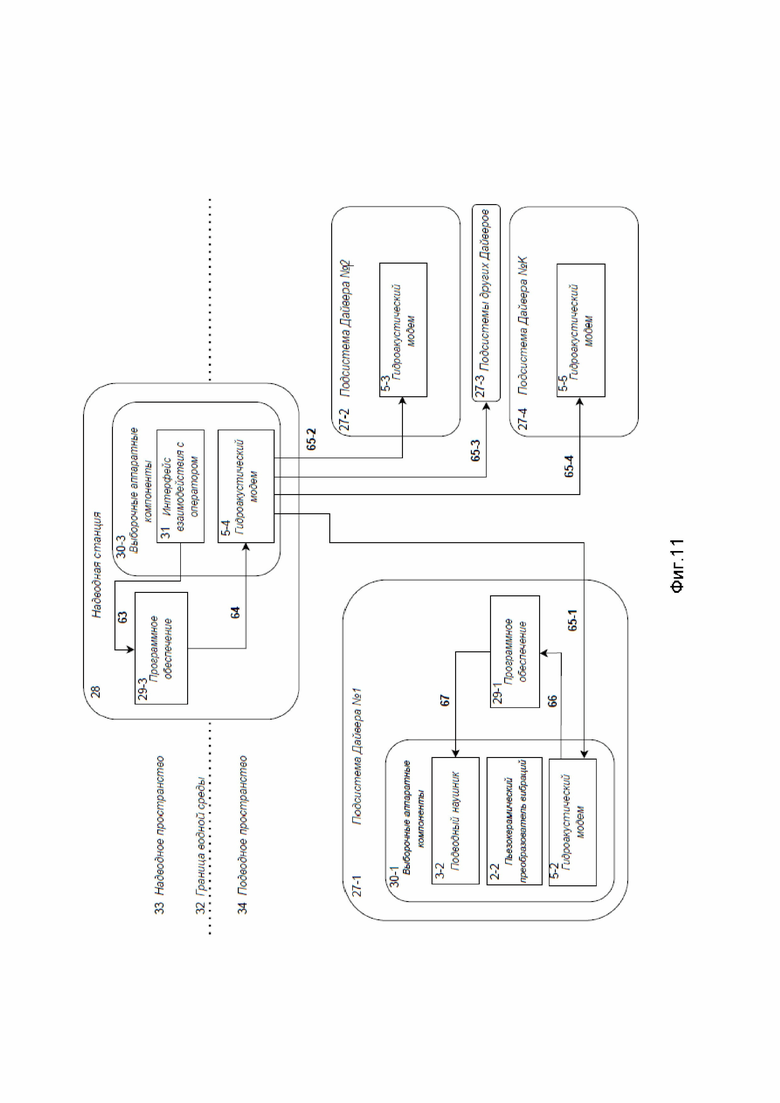
Пример 6. Сценарий коммуникации системы вида «Надводная станция – множество дайверов». См. фигуру 11.
На фиг. 11 представлен сценарий передачи информации от подводной станции (28) нескольким дайверам посредством схематического представления взаимодействия блоков подсистемы первого дайвера (27-1), подсистемы второго дайвера (27-2), подсистемы дайвера №К (27-4) и подсистем других дайверов (27-3).
Процесс начинается с поступления (63) сигнала от оператора с блока 931) на блок (29-6), передачи его на гидроакустический модем (5-4). Сообщения передаются по гидроакустическому каналу от гидроакустического модема (5-4):
- к гидроакустическому модему (5-1) блока подсистемы первого дайвера (27-1) – сигнал (65-1),
- к гидроакустическому модему (5-3) блока подсистемы второго дайвера (27-2) – сигнал (65-2),
- к гидроакустическому модему (5-5) блока подсистемы дайвера №К (27-4) – сигнал (65-4),
- к гидроакустическому модему блока подсистемы других дайверов (27-3) – сигнал (65-3).
На примере блока подсистемы первого дайвера (27-1) видно, что полученный при помощи гидроакустического модема (5-2) сигнал поступает (66) в блок программного обеспечения (29-1), в котором происходит его обработка и преобразование в голосовой сигнал. Результат работы блока программного обеспечения (29-1) поступает (67) на блок подводного наушника (3-2), при помощи которого реализуется озвучивание голосовой информации пользователю подсистемы первого дайвера (27-1) .
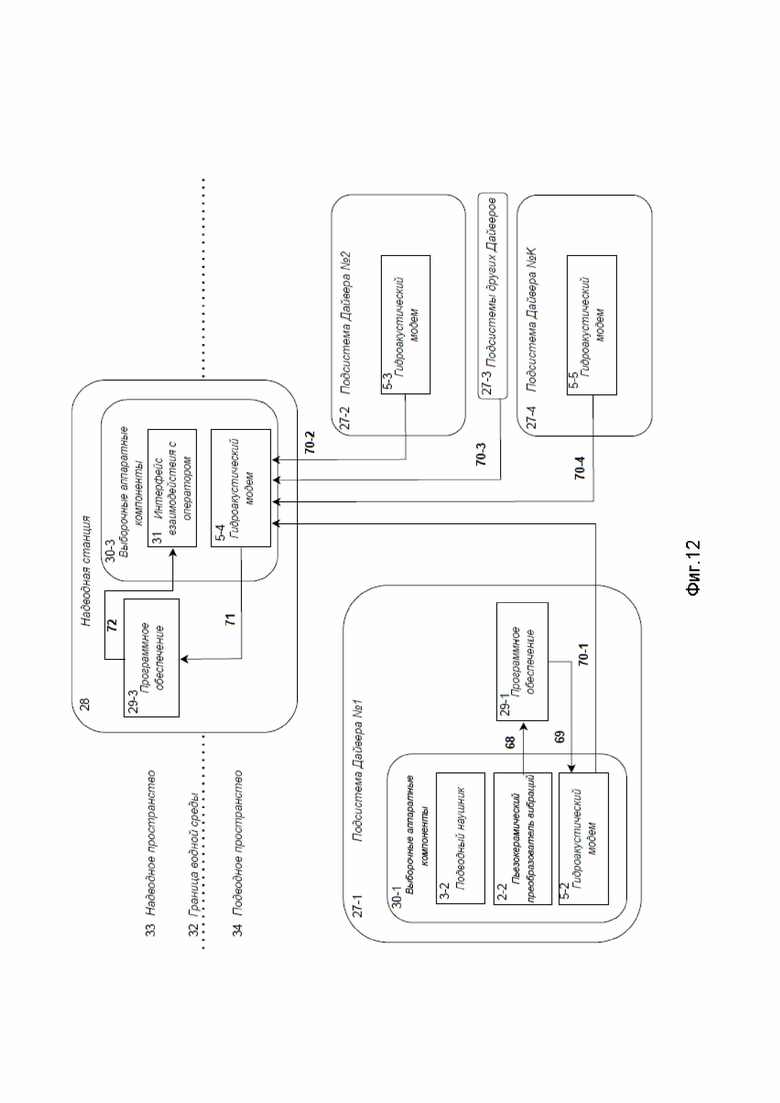
Пример 7. Сценарий коммуникации системы вида «Надводная станция – множество дайверов». См. фигуру 12.
На фиг. 12 представлен сценарий передачи информации от нескольких дайверов к подводной станции (28) посредством схематического представления взаимодействия блоков подсистемы первого дайвера (27-1), подсистемы второго дайвера (27-2), подсистемы дайвера №К (27-4) и подсистем других дайверов (27-3).
На примере блока подсистемы первого дайвера (27-1) видно, что процесс начинается с поступления (68) сигнала, считанного с гортани первого дайвера при помощи пьезокерамического преобразователя вибраций (2-2), в блок программного обеспечения (29-1) для обработки полученных данных. Результат работы программного обеспечения (29-1) поступает (69) на вход гидроакустического модема (5-2). Сообщения передаются по гидроакустическому каналу от гидроакустического модема (5-2) на гидроакустический модем (5-4) – сигнал (70-1).
Точно также сообщения передаются по гидроакустическому каналу от гидроакустического модема (5-3) блока подсистемы второго дайвера (27-2) – сигнал (70-2), от гидроакустического модема (5-5) блока подсистемы дайвера №К (27-4) – сигнал (70-4), от гидроакустического модема (5-3) блока подсистемы других дайверов (27-3) – сигнал (70-3).
Полученный при помощи гидроакустического модема (5-4) сигнал поступает (71) в блок программного обеспечения (29-3), в котором происходит его обработка и преобразование в сигнал того вида, который требует реализованный вид интерфейса взаимодействия с оператором (31). Результат работы блока программного обеспечения (29-3) поступает (72) на блок интерфейса взаимодействия с оператором (31), при помощи которого в дальнейшем реализуется обратная связь со стороны оператора на поступивший сигнал от подсистемы первого дайвера (27-1), блока подсистемы второго дайвера (27-2), блока подсистемы дайвера №К (27-4), блока подсистемы других дайверов (27-3).
Промышленная применимость.
Предлагаемая система для голосовой коммуникации пользователей в подводных условиях может быть осуществлена специалистом на практике и при осуществлении обеспечивает реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
Электронная составляющая системы располагается внутри герметичного корпуса. Электронная составляющая включает в себя одноплатный компьютер, несущую плату для одноплатного компьютера, а также аккумуляторные батареи. Герметичный корпус состоит из двух деталей - стакана и крышки, произведенных из анодированного алюминия.
Система герметизации представляет из себя радиальное уплотнение и осуществляется за счет использования резиновых уплотнительных колец, установленных в проточку в крышке. Для реализации передачи и приема электрических сигналов за пределы корпуса, используются герметичные разъемы, вкручиваемые в корпус. Стык резьбы герметизируется за счет использования анаэробных герметиков. Рассчитанная и изготовленная конструкция может эксплуатироваться в водной среде при давлении до 40 атм. и глубине погружений до 400 метров. Индивидуально разработанный дизайн корпуса сокращает габариты устройства и позволяет достичь необходимые характеристики по бесперебойности его работы в подводных условиях
Таким образом, за счет того, что:
располагают в области гортани пользователя пьезокерамический преобразователь вибраций,
получают голосовое сообщение указанного пользователя пьезокерамическим преобразователем вибраций и оцифровывают указанный сигнал,
очищают указанный цифровой сигнал от шумов блоком обработки сигналов, и им же преобразуют в закодированный сигнал,
передают указанный закодированный сигнал с помощью гидроакустического модема на гидроакустические модемы других пользователей, с кем производится коммуникация,
блоком обработки сигналов на основании закодированного сигнала заново создают аналоговый сигнал и передают его в подводный наушник.
и достигается заявленный технический результат, а именно: возможность улучшения качества связи за счет удаления фонового шума среды, шума дыхания и других помех, обеспечивая чистый и четко различимый речевой сигнал даже в сложных гидроакустических условиях.
Дополнительный технический результат – возможность работы системы без применения полнолицевых масок, что характерно для подобных систем, а также возможность передачи сигнала на большие дистанции по сравнению с аналогами.
Ввиду ограничений эксплуатации большинства аналогов, связанных с необходимостью использования полнолицевых масок и дополнительного дайвинг-оборудования, представленное устройство существенно отличается от них удобством применения. Устройство не требует дополнительной экипировки дайвера и совместимо с любым видом оборудования.
Система представляет из себя компактное встраиваемое решение для полноценной голосовой коммуникации, не требующей дополнительного сообщения с внешними устройствами. В отличие от аналогичных решений, использующих кабельное сообщение, система оснащена функцией гидроакустической передачи сигнала.
Предлагаемая система может использоваться также для первичного поиска, работы с аквакультурами, подводной сварки, монтажа-демонтажа подводных конструкций и т.д. Кроме того, существует возможность использования ее в образовательных целях при обучении дайвингу и водолазному делу, возможность проведения экскурсий, а также использование в аварийных ситуациях и для других занятий, предполагающие нахождения человека под водой с возможной задачей коммуникации между пользователями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ гидроакустической телефонной связи водолазов и устройство для его осуществления (варианты) | 2017 |
|
RU2658477C1 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ РЕЧЕВОЙ СВЯЗИ ДАЙВЕРА | 2018 |
|
RU2686606C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2433428C2 |
| Радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи | 2019 |
|
RU2703406C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| МАЛОГАБАРИТНОЕ УНИВЕРСАЛЬНОЕ ПОДВОДНОЕ ГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО | 2016 |
|
RU2649057C2 |
| Личная подводная спасательная и навигационная система | 2015 |
|
RU2623423C2 |
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| МОБИЛЬНЫЙ УЗЕЛ ПОДВИЖНОЙ СВЯЗИ | 2008 |
|
RU2359410C1 |
Изобретение относится к области вычислительной техники для обработки аудиоданных. Технический результат заключается в повышении качества связи в подводных условиях. Технический результат достигается за счет этапов, на которых располагают плотно у горла пользователя в области щитовидного хряща пьезокерамический преобразователь вибраций, получают голосовое сообщение указанного пользователя пьезокерамическим преобразователем вибраций, преобразовывают его в низкоамплитудный электрический сигнал и оцифровывают посредством аудиокарты, очищают указанный цифровой сигнал от шумов блоком обработки сигналов посредством шумоподавления и им же преобразуют в закодированный сигнал, передают указанный закодированный сигнал с помощью гидроакустического модема на гидроакустические модемы других пользователей, с кем производится коммуникация, блоком обработки сигналов на основании закодированного сигнала и посредством аудиокарты заново создают аналоговый сигнал и передают его в подводный наушник, состоящий из пьезокерамического излучателя, закрепленный на подложке из стеклотекстолита и герметизированный за счет поверхностного нанесения двухкомпонентного полиуретанового компаунда, где подводный наушник закреплен при помощи зажима на подводной маске. 2 н. и 3 з.п. ф-лы, 12 ил.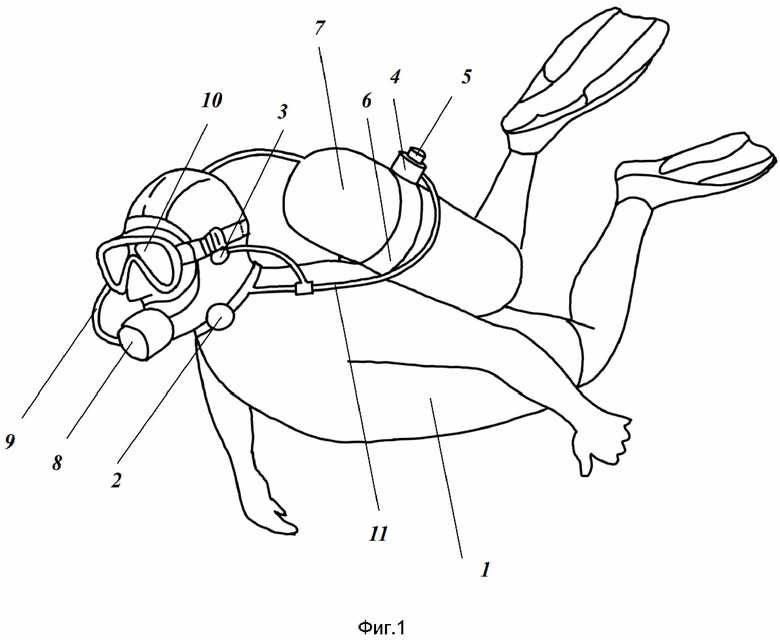
1. Система для голосовой коммуникации пользователей в подводных условиях, отличающаяся тем, что система включает в себя множество подсистем пользователей, каждая из которых включает в себя
a) располагаемый плотно у горла пользователя в области щитовидного хряща пьезокерамический преобразователь вибраций, герметизированный с помощью двухкомпонентного электроизоляционного полиуретанового компаунда, выполненный с возможностью считывания колебаний гортани и преобразования упомянутых колебаний в низкоамплитудный электрический сигнал и соединенный с
b) располагаемым около ушной раковины пользователя подводным наушником, состоящим из пьезокерамического излучателя, закрепленным на подложке из стеклотекстолита и герметизированным за счет поверхностного нанесения двухкомпонентного полиуретанового компаунда, где подводный наушник закреплен при помощи зажима на подводной маске, при этом
c) пьезокерамический преобразователь вибраций и подводный наушник соединены через операционный усилитель и аудиокарту с располагаемым на пользователе герметичным корпусом, где аудиокарта выполнена с возможностью оцифровки аналогового сигнала и обратного преобразования цифрового сигнала в аналоговый сигнал, при этом упомянутый герметичный корпус содержит:
i) блок обработки сигналов, выполненный с возможностью обработки сигналов алгоритмами глубокого обучения для очищения сигнала от шума посредством шумоподавления, кодирования речи в закодированную последовательность и обратной генерации голосового сигнала для воспроизведения ее получателю,
ii) гидроакустический модем.
2. Система по п. 1, отличающаяся тем, что система дополнительно включает в себя надводную станцию, расположенную на границе водной среды, имеющую расположенный в подводном пространстве
a) гидроакустический модем, соединенный с
b) блоком обработки сигналов, выполненным с возможностью обработки сигналов алгоритмами глубокого обучения для шумоподавления, кодирования речи в закодированную последовательность и обратного раскодирования в текстовый, или звуковой, или графический вид информации для воспроизведения ее получателем, расположенным в надводном пространстве и включающим в себя
с) модуль обмена данными с оператором.
3. Способ голосовой коммуникации пользователей в подводных условиях, при котором
a) располагают плотно у горла пользователя в области щитовидного хряща пьезокерамический преобразователь вибраций,
b) получают голосовое сообщение указанного пользователя пьезокерамическим преобразователем вибраций, преобразовывают его в низкоамплитудный электрический сигнал и оцифровывают посредством аудиокарты,
c) очищают указанный цифровой сигнал от шумов блоком обработки сигналов посредством шумоподавления и им же преобразуют в закодированный сигнал,
d) передают указанный закодированный сигнал с помощью гидроакустического модема на гидроакустические модемы других пользователей, с кем производится коммуникация,
e) блоком обработки сигналов на основании закодированного сигнала и посредством аудиокарты заново создают аналоговый сигнал и передают его в подводный наушник, состоящий из пьезокерамического излучателя, закрепленный на подложке из стеклотекстолита и герметизированный за счет поверхностного нанесения двухкомпонентного полиуретанового компаунда, где подводный наушник закреплен при помощи зажима на подводной маске.
4. Способ по п. 3, отличающийся тем, что предварительно обучают все блоки обработки сигналов алгоритмами глубокого обучения для шумоподавления, распознавания речи, преобразования ее в закодированный сигнал, обратной генерации в голосовой сигнал и очищения от шума.
5. Способ по п. 3, отличающийся тем, что закодированный сигнал дополнительно передают на гидроакустический модем надводной станции, где его раскодируют в текстовый, или звуковой, или графический вид информации для воспроизведения оператором.
| Токарный резец | 1924 |
|
SU2016A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ РЕЧЕВОЙ СВЯЗИ ДАЙВЕРА | 2018 |
|
RU2686606C1 |

