Устройство относится к подвижной военной технике связи и может быть использовано при модернизации и создании мобильных узлов связи (МУС) на различных транспортных базах (ТБ), для обеспечения работы каналов связи радиостанций (РС) диапазонов МВ и ДМВ1 при минимальной радиовидимости и в условиях активной работы систем радиоэлектронного противодействия (РЭП) противника (воздействия сосредоточенных преднамеренных помех).
Известно антенно-мачтовое устройство (АМУ) по а. с. СССР №1269705, содержащее излучатель антенны, в котором имеется механизм укладки излучателя антенны в транспортное положение.
Недостатком известного антенно-мачтового устройства (АМУ) является то, что устройство не обеспечивает работу антенны без полного выдвижения мачты.
Известны также подъемно-мачтовые устройства (ПМУ) производства компании Will-Burt (http://www.willburt.com), содержащие телескопическую мачту и механизм укладки кабеля (МУК) по типу винтовой пружины.
Недостатком этих ПМУ является отсутствие дополнительного механизма, обеспечивающего поворот антенного устройства с целью обеспечения минимальных габаритов в транспортном положении, а также использование всей длины корпуса мачты для размещения МУК, что может быть недопустимо в отдельных случаях.
Известно подъемно-мачтовое устройство мобильной антенной установки по патенту РФ №2373618, H01Q 1/08, которое состоит из основания, подъемной мачты и опорной платформы.
Недостаток этого подъемно-мачтового устройства - ограниченное пространство для размещения МУК внутри транспортного средства.
Наиболее близким аналогом по технической сущности к предлагаемому является автоматическое антенно-мачтовое устройство с механизмами подъема по патенту РФ №2813629, H01Q 1/08, принятое за прототип.
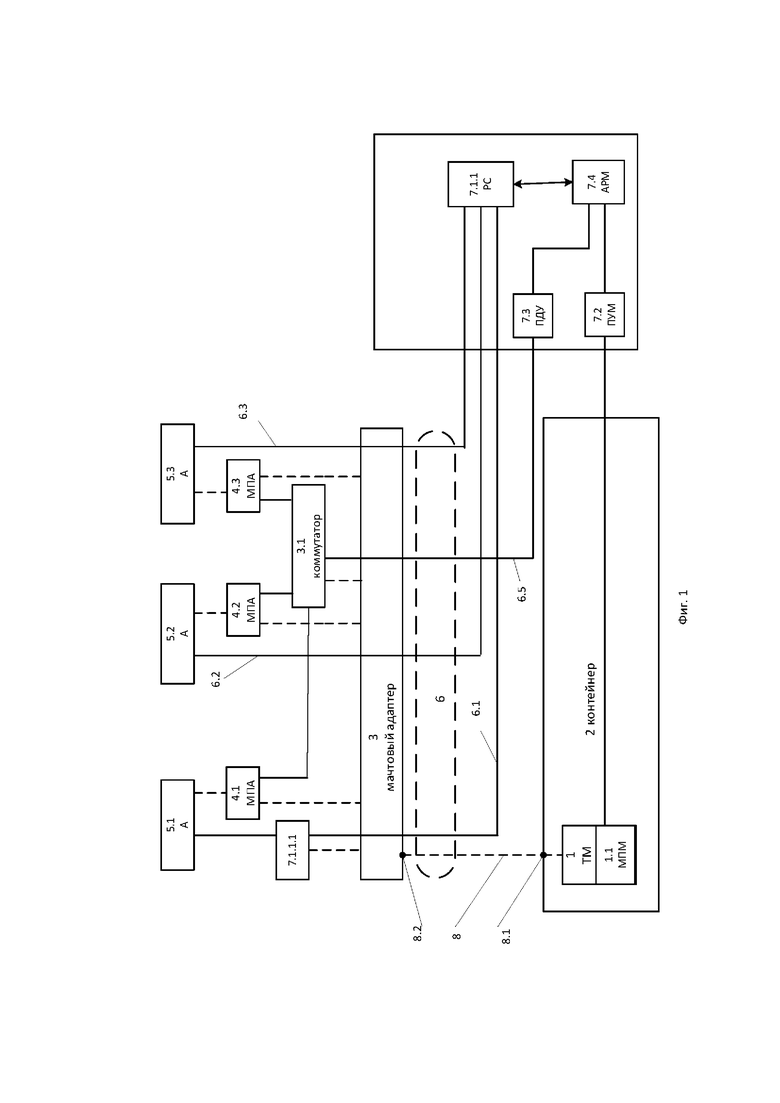
Структурная схема устройства-прототипа изображена на фиг. 1, где приняты следующие обозначения:
1 - телескопическая мачта (ТМ);
1.1 - механизм подъема мачты (МПМ);
2 - контейнер;
3 - мачтовый адаптер;
3.1 - коммутатор управления механизмами подъема антенн;
4.1÷4.3 - механизм подъёма первой, второй и третьей штыревых антенн (МПА);
5.1÷5.3 - первая, вторая и третья штыревые антенны (А);
6 - комбинированный кабель;
6.1 - кабель для питания и управления первым модулем радиостанции;
6.2, 6.3 - высокочастотные (ВЧ) кабели для питания второй и третьей штыревых антенн;
6.5 - низкочастотный (НЧ) кабель соединения с коммутатором;
7 - обитаемый объем транспортного средства (ТС);
7.1.1 - радиостанция, состоящая из модулей разного диапазона частот;
7.1.1.1 - первый ВЧ модуль радиостанции;
7.2 - пульт управления мачтой (ПУМ);
7.3 - пульт дистанционного управления (ПДУ) механизмами подъема антенн;
7.4 - автоматизированное рабочее место (АРМ);
8 - пружинный каркас (пружина);
8.1 - элемент крепления нижнего конца пружины к контейнеру;
8.2 - элемент крепления верхнего конца пружины к адаптеру.
На фиг. 1 механические соединения изображены пунктирными линиями, а кожух-чехол комбинированного кабеля 6 - штрихпунктирной линией.
Устройство-прототип содержит контейнер 2, внутрь которого помещена мачта 1 с механизмом подъема мачты 1.1, в качестве которого могут быть использованы электрический или пневматический, или гидравлический приводы.
Контейнер 2 выполняет функцию дополнительной защиты мачты 1 и подъемного устройства 1.1 от внешних воздействий (воды, песка, снега и т.п.), а также обеспечивает возможность монтажа ААМУ снаружи или внутри всех типов транспортных баз (ТБ) (транспортных средств (ТС), предназначенных для создания полевых объектов связи и управления.
Мачтовый адаптер 3 жестко закреплен на верхнем звене (конечной ступени) телескопической мачты 1 для обеспечения установки антенно-мачтового устройства в рабочее состояние (вертикальное положение). При этом мачтовый адаптер 3 может быть выполнен как угловым (Г-образным), так и прямым, в зависимости от конфигурации ТС.
На мачтовом адаптере 3 расположены:
- механизмы подъема антенн 4.1, 4.2 и 4.3 с соответствующими первой 5.1 второй 5.2 и третьей 5.3 штыревыми антеннами;
- коммутатор 3.1 для управления МПА 4.1, 4.2 и 4.3 по соответствующим кабелям;
- первый модуль 7.1.1.1 радиостанции, соединенный кабелем с первой антенной 5.1;
- элемент крепления верхнего конца 8.2 пружины 8 к адаптеру 3 (изображен в виде точки).
На контейнере 2 установлен элемент крепления 8.1 (изображен в виде точки) нижнего конца пружины 8, которая является основой механизма укладки комбинированного кабеля 6, состоящего из кабелей 6.1÷6.3 и 6.5, помещенных в кожух-чехол.
Пружина 8, на витках которой закреплен комбинированный кабель 6, при подъеме мачты 1 растягивается в виде спирали, поднимая кабель 6. При свертывании мачты пружина 8 вместе с кабелем 6 укладывается на контейнер 2 вокруг мачты 1.
Коммутатор управления 3.1 соответствующими кабелями соединен с механизмами подъема 4.1 4.2 и 4.3 первой 5.1, второй 5.2 и третьей 5.3 штыревых антенн.
Первая штыревая антенна 5.1 ВЧ кабелем подключена к первому ВЧ модулю 7.1.1.1 радиостанции 7.1.1, который кабелем управления и питания 6.1 соединен с радиостанцией 7.1.1. Первый ВЧ модуль 7.1.1.1 радиостанции 7.1.1 вынесен за пределы обитаемого объема 7 ТС и помещен на адаптер 3 рядом с первой штыревой антенной 5.1 для уменьшения потерь высокочастотного сигнала в ВЧ кабеле соединения модуля 7.1.1.1 с антенной 5.1. Вторая штыревая антенна 5.2 ВЧ кабелем 6.2 соединена со вторым модулем радиостанции 7.1.1 (на фиг.1 не показан), расположенной в обитаемом объеме транспортной базы 7. Третья штыревая антенна 5.3 ВЧ кабелем 6.3 соединена с третьим модулем радиостанции 7.1.1 (на фиг.1 не показан).
В обитаемом объеме транспортного средства 7 размещены автоматизированное рабочее место 7.4, имеющее связь с модулями радиостанции 7.1.1, пультом управления мачтой 7.2, а также пультом дистанционного управления 7.3, который соединен НЧ кабелем 6.5 с коммутатором 3.1. Пульт управления мачтой 7.2 соединен с механизмом подъема мачты 1.1.
Причем автоматизированное рабочее место может состоять из нескольких АРМ, связанных между собой локальной вычислительной сетью (на фиг. 1 не показаны).
Функционирование устройства-прототипа происходит следующим образом.
Перевод штыревых антенн 5.1, 5.2 и в 5.3 из вертикального положения в горизонтальное (транспортное) при проезде под препятствиями по ходу движения (высотой менее 4,0 м, по ГОСТ 32959-2014 и ПДД РФ) осуществляется МПА 4.1, 4.2 и 4.3 соответственно по командам с ПДУ 7.3 или автоматически с АРМ 7.4 (при наличии в ТС бортовой радиолокационной станции (РЛС) или лазерного дальномера-высотомера (на фиг. 1 не показаны). Для этого с ПДУ 7.3 по кабелю 6.4 подают команду «ГОР» через коммутатор 3.1 поочередно на МПА 4.1, 4.2 и 4.3, имеющие наряду с электроприводами ручные поворотные устройства. Для установки антенн 5.1, 5.2 и 5.3 в вертикальное положение (рабочее, при использовании этих антенн в качестве «бортовых» или «мачтовых»), с ПДУ 7.3 по кабелю 6.4 подают команду «ВЕРТ» через коммутатор 3.1 поочередно на МПА 4.1, 4.2 и 4.3.
Если антенны вписываются в габарит по высоте 4,0 м для автодорог при установке на все типы ТС, предназначенные для создания ПОС, то они не требуют оперативного перевода из вертикального положения в горизонтальное.
Для работы антенн 5.1, 5.2 и 5.3 в качестве «мачтовых», следует поднять антенны 5.1, 5.2 и 5.3 на мачте 1 на необходимую высоту для обеспечения уверенного радиообмена с самыми удаленными абонентами по командам с пульта управления мачтой 7.2. Команды с пульта управления мачтой 7.2 на механизм подъема мачты 1.1 могут подаваться как в ручном режиме оператором, так и в автоматическом по магистрали управления с АРМ 7.4 или любого другого, соединенного с ним по локальной вычислительной сети и размещенного в обитаемом объеме ТС 7.
Управление мачтой 1 с АРМ 7.4, с установленным на нем соответствующим программным обеспечением, может предусматривать автоматический подъем мачты 1 на высоту, обеспечивающую минимальную видимость для технических средств разведки (ТСР) при заданном качестве канала связи на заранее подготовленных частотах (ЗПЧ) для каждой антенны в ее рабочем диапазоне, по результатам анализа зон уверенного приема на электронной карте местности (ЭКМ) на ЗПЧ, с учетом установленных уровней мощности модулей радиостанции 7.1.1, показаний их анализаторов помеховой обстановки, коэффициентов стоячей волны антенн 5.1, 5.2 и 5.3.
Устройство-прототип обеспечивает развёртывание и свёртывание мачты 1 с тремя штыревыми антеннами 5.1, 5.2 и 5.3 за время не более 3 мин, без выхода экипажа из ПОС наружу.
В качестве телескопической мачты может быть использовано, например, устройство мачтовое типа УМ-В-2. Первая симметричная антенна 5.1 может быть, например, типа ШПАС-30-108АВ, вторая 5.2 - типа ШПАС-108-520АВ, третья - типа АБ-520-2500.
Недостатками устройства-прототипа являются:
- возможность установки на мачтовом адаптере только двух негабаритных антенн;
- отсутствие в составе автоматизированного рабочего места устройств для контроля радиообстановки (КРО), обеспечения передачи информации на минимальной мощности и приема информации при сильных помехах.
Задача предлагаемого устройства - расширение функциональных возможностей при минимальной заметности для технических средств разведки противника.
Для решения поставленной задачи в устройство для повышения разведзащищённости и помехозащищённости мобильных узлов связи, содержащее телескопическую мачту с механизмом подъема, помещенные в контейнер, который закреплен снаружи или внутри корпуса транспортного средства (ТС); мачтовый адаптер-трансформер, жестко закрепленный на верхнем звене телескопической мачты, на котором расположены первый, второй и третий механизмы подъема антенн с соответствующими штыревыми антеннами, первый коммутатор управления механизмами подъема антенн, соединенный с первым, вторым и третьим механизмами подъема антенн по соответствующим низкочастотным (НЧ) кабелям, а также механизм укладки кабеля, основой которого является пружина, на витках которой закреплен комбинированный кабель, состоящий из двух высокочастотных (ВЧ) и одного НЧ кабелей, помещенных в кожух-чехол, при этом элемент крепления верхнего конца пружины зафиксирован на мачтовом адаптере, а нижний конец пружины - на элементе крепления на контейнере;
в обитаемом объеме ТС размещены автоматизированное рабочее место (АРМ) дистанционного управления механизмами подъема антеннами и первой радиостанцией, имеющее связь с пультом управления мачтой (ПУМ), пультом дистанционного управления, при этом ПУМ соединен с механизмом подъема мачты, а пульт дистанционного управления механизмами подъема антенн соединен по НЧ кабелю с первым коммутатором управления механизмами подъема антенн, согласно изобретению, введены четвертая штыревая антенна с четвертым механизмом подъема и второй коммутатор управления механизмами подъема антенн, соединенный с третьим и четвертым механизмами подъема антенн по соответствующим НЧ кабелям, а также по НЧ кабелю, входящему в комбинированный кабель для питания и управления - с пультом дистанционного управления механизмами подъема антенн;
АРМ включает персональную электронно-вычислительную машину (ПЭВМ), анализатор спектра диапазона частот, соединенный с комплектом своих антенн и автоматизированный метеокомплект (АМК) с наружным оборудованием, при этом ПЭВМ, АМК и анализатор спектра диапазона частот имеют связь по сети Ethernet между собой и с входами с первой по четвертую радиостанций, выходы которых соединены с соответствующими входами коммутатора антенн, имеющего связь по сети Ethernet с АРМ, кроме того, выходы коммутатора антенн соединены по ВЧ кабелям для питания с соответствующими с первой по четвертую антеннами, при этом в качестве мачтового адаптера использован адаптер-трансформер.
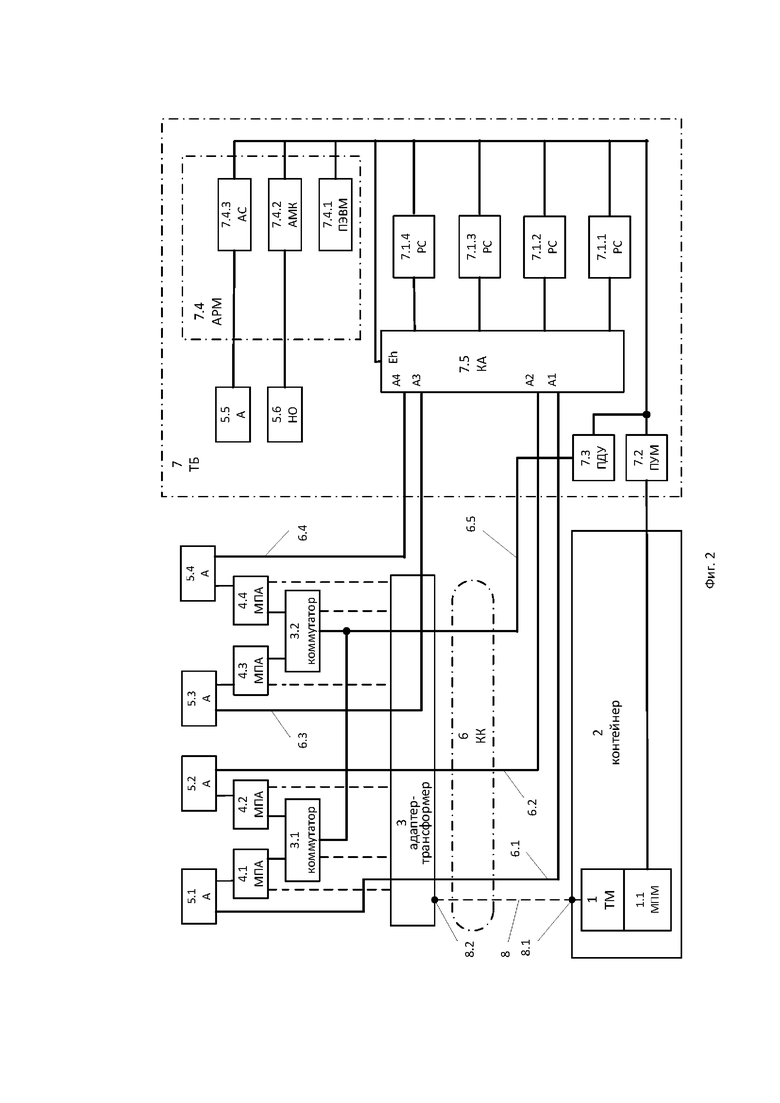
Структурная схема предлагаемого устройства для повышения разведзащищённости и помехозащищённости мобильных узлов связи (РПЗ МУС) показана на фиг. 2, где приняты следующие обозначения:
1 - телескопическая мачта (ТМ);
1.1 - механизм подъема мачты;
2 - контейнер;
3 - мачтовый адаптер-трансформер;
3.1, 3.2 - первый и второй коммутаторы для питания и управления механизмами подъема антенн;
4.1÷4.4 - с первого по четвертый механизмы подъема антенн (МПА);
5.1÷5.4 - антенны (А);
5.5 - комплект антенн для антенной системы анализатора спектра;
5.6 - наружное оборудование метеокомплекта (НО);
6 - комбинированный кабель (КК), включающий:
- 6.1 - высокочастотный (ВЧ) кабель для питания антенны 5.1;
- 6.2 - ВЧ кабель для питания антенны 5.2;
- 6.3 - ВЧ кабель для питания антенны 5.3;
- 6.4 - ВЧ кабель для антенны питания 5.4;
- 6.5 - НЧ кабель для питания и управления первым и вторым коммутаторами;
7 - обитаемый объем транспортной базы (ТБ) (транспортного средства (ТС);
7.1.1÷7.1.4 - с первой по четвертую радиостанции (РС);
7.2 - пульт управления мачтой (ПУМ);
7.3 - пульт дистанционного управления (ПДУ);
7.4 - автоматизированное рабочее место (АРМ);
7.4.1 - персональная электронно-вычислительная машина (ПЭВМ);
7.4.2 - автоматизированный метеокомплект (АМК);
7.4.3 - анализатор спектра диапазона частот (АС);
7.5 - коммутатор антенн;
8 - пружина-каркас (пружина);
8.1 - элемент крепления нижнего конца пружины к контейнеру;
8.2 - элемент крепления верхнего конца пружины к адаптеру.
Заявляемое устройство содержит контейнер 2, внутрь которого помещена мачта 1 с механизмом подъема мачты 1.1, в качестве которого может быть использованы электрический или пневматический, или гидравлический приводы. Контейнер 2 выполняет функцию дополнительной защиты мачты 1 и подъемного устройства 1.1 от внешних воздействий (воды, песка, снега и т.п.), а также обеспечивает возможность монтажа ААМУ снаружи или внутри всех типов транспортных баз (ТБ) (транспортных средств (ТС), предназначенных для создания полевых объектов связи и управления.
На контейнере 2 установлен элемент крепления 8.1 (изображен в виде точки) нижнего конца пружины 8, которая является основой механизма укладки комбинированного кабеля 6. Элемент крепления 8.2 (изображен в виде точки) верхнего конца пружины 8 закреплен на адаптере-трансформере 3.
Комбинированный кабель 6 с ВЧ кабелями 6.1÷6.4 для антенн 5.1÷5.4 и НЧ кабелем 6.5, предназначенным для управления коммутаторами 3.1 и 3.2, помещены в кожух-чехол.
В предлагаемом устройстве использован мачтовый адаптер-трансформер 3, с расширенными функциональными возможностями по размещению антенн и увеличению пространственного разноса между ними. Мачтовый адаптер 3 представляет собой Г-образную конструкцию из двух основных плеч длиной L примерно равной ширине ТБ, около 2,5 м каждое, жестко закрепленных под углом 90° на верхнем звене (конечной ступени) телескопической мачты 1. Над основными плечами длиной L, параллельно им, от оси мачты 1 к наружному краю каждого плеча закреплены подвижные, укороченные плечи длиной L/2 каждое. Эти укороченные плечи имеют по два фиксированных положения для обеспечения установки их параллельно (для работы мобильного узла связи в движении) или перпендикулярно (для работы МУС с поднятой мачтой 1, на стоянке) основным плечам соответственно. Установка укороченных плеч длиной L/2 в положения перпендикулярные основным плечам длиной L производится автоматически, при подъёме мачты 1, что преобразует конструкцию адаптера 3 из Г-образной конструкции в Х-образную. На наружных краях основных плеч монтируются МПА 4.1 и 4.4, а на наружных краях укороченных плеч длиной L/2 - МПА 4.2 и 4.3 соответственно. На МПА 4.1÷4.4 установлены антенны 5.1÷5.4 в соответствии со структурной схемой фиг. 2. Коммутаторы 3.1 и 3.2 для МПА монтируются на площадке в основании угла, образованного основными плечами адаптера-трансформера 3.
На мачтовом адаптере-трансформере 3 расположены:
- механизмы подъема антенн 4.1÷4.4 с соответствующими первой 5.1, второй 5.2, третьей 5.3 и четвертой 5.4 штыревыми антеннами, диапазона (30-520) МГц, работающих в качестве как бортовых, так и мачтовых с возможностью оптимальной высоты подъема на телескопической мачте 1;
- первый 3.1 и второй 3.2 коммутаторы для управления МПА 4.1÷4.4 по соответствующим кабелям;
- элемент крепления верхнего конца 8.2 пружины 8 к адаптеру 3 (изображен в виде точки).
В обитаемом объеме транспортного средства 7 размещены радиостанции диапазона частот (30-520) МГц 7.1.1÷7.1.4, выходы которых соединены с соответствующими входами коммутатора антенн 7.5, выходы которого соединены соответствующими кабелями 6.1÷6.4 с антеннами 5.1÷5.4. Причем радиостанции 7.1.1÷7.1.4 снабжены устройствами автоматического регулирования мощности.
Кроме того, автоматизированное рабочее место 7.4 включает персональную электронно-вычислительную машину 7.4.1 со специальным программным обеспечением, которая по сети Ethernet соединена с автоматизированным метеокомплектом 7.4.2, анализатором спектра диапазона частот 7.4.3, радиостанциями 7.1.1÷7.1.4, и коммутатором антенн 7.5, а также с пультом управления мачтой 7.2 и пультом дистанционного управления 7.3. При этом автоматизированный метеокомплект 7.4.2 соединен с наружным оборудованием 5.6 по соответствующим кабелям из комплекта; анализатор спектра - с комплектом антенн 5.5 по своим ВЧ кабелям. Выход ПУМ 7.2 соединен с механизмом подъема мачты 1.1; выход ПДУ 7.3 - с входами первого 3.1 и второго 3.2 коммутаторов.
В предлагаемом устройстве проблема повышения разведзащищённости и помехозащищённости решается комплексно как в приемном, так и в передающем трактах радиостанций 7.1.1÷7.1.4.
По результатам анализа помеховой обстановки анализатором спектра 7.4.3 в зоне работы МУС с абонентами, зарегистрированными в своих радиосетях (АРС) и радионаправлениях (АРН) на АРМ 7.4 принимается решение по оптимизации канала связи без активной компенсации помех (АКП) или в одном из режимов с АКП, реализованном при помощи известных устройств (на фиг. 2 не показаны), например, параллельного модема по патенту РФ 172898, H04J 1/20, который обеспечивает коммутацию и обработку информации, принимаемой радиостанциями 7.1.1÷7.1.4 на антенны 5.1÷5.4 в режимах работы как без АКП, так и с АКП по алгоритмам работы параллельного модема.
Работает предлагаемое устройство следующим образом.
Перевод негабаритных бортовых антенн 5.1÷5.4 из вертикального положения в горизонтальное (транспортное) при проезде под препятствиями по ходу движения (высотой менее 4,0 м) осуществляется МПА 4.1÷4.4 по командам с пульта дистанционного управления 7.3 вручную или автоматически по командам с АРМ 7.4 (при наличии в мобильном устройстве связи бортовой РЛС или лазерного дальномера-высотомера (на фиг. 2 не показаны). Для этого с ПДУ 7.3 подают команду «Гор» по кабелю 6.5 через коммутаторы 3.1, 3.2 поочередно на МПА 4.1÷4.4, для установки антенн 5.1÷5.4 в горизонтальное положение или команду «Верт» для установки антенн 5.1÷5.4 в вертикальное положение (рабочее).
Для работы антенн 5.1÷5.4 в качестве «мачтовых», необходимо поднять мачтовый адаптер 3 с антеннами 5.1÷5.4 на телескопической мачте 1 на необходимую высоту для обеспечения уверенного радиообмена с самыми удалёнными абонентами по командам с пульта управления мачтой 7.2. Команды с ПУМ 7.2 на механизм подъема мачты 1.1 могут подаваться как в ручном режиме оператором, так и в автоматическом - по магистрали управления с любого АРМ 7.4, размещенного в обитаемом объеме транспортной базы 7.
Работу пульта управления мачтой 7.2 рассмотрим в части перевода устройства из рабочего развернутого положения в транспортное. Устройство переводится из рабочего положения в транспортное путем свертывания мачты 1 механизмом подъема мачты 1.1. При свертывании секций (звеньев) мачты 1 кабель, закрепленный на пружинном каркасе будет укладываться в механизм укладки кабеля из состояния растянутой пружины (спирали) в сжатую пружину.
Предлагаемое устройство обеспечивает развёртывание и свёртывание мачты 1 с антеннами 5.1÷5.4 за время не более 3 мин, без выхода экипажа из МУС наружу.
В качестве телескопической мачты ТМ 1 может быть использовано, например, устройство мачтовое типа УМ-В-2.
Используются негабаритные антенны 5.1÷5.4 одного типа, например, типа ШПАН-30-520АВТ, или типа ШПАС-30-108АВ, ШПАС-108-520АВ, с соответствующим учетом диапазона рабочих частот этих антенн.
Таким образом, использование четырех антенн 5.1÷5.4 и четырех радиостанций 7.1.1÷7.1.4 обеспечивает:
- постоянный контроль радиообстановки в рабочих диапазонах частот;
- прием и передачу информации в четырех радиосетях (радионаправлениях) на оптимальных для работы в этих радиосетях (радионаправлениях) антенн по КСВ и диаграммам направленности с минимальной заметностью для технических средств разведки противника (на минимуме мощности в режиме с устройством автоматического регулирования мощности и при минимальной высоте подъема антенн на мачте ТМ 1, а при работе средств РЭП противника, (активной постановке помех) - в одной-двух приоритетных радиосетях (радионаправлениях) в режимах с АКП.
При выборе частот для связи обеспечивается постоянный контроль радиообстановки (КРО) в диапазонах рабочих частот МУС, учитываются как параметры антенн (коэффициента стоячей волны (КСВ), диаграммы направленности (ДНА), так и среды распространения на трассах между абонентами.
Заявляемое устройство решает задачи по передаче информации с заданным качеством при минимальной радиовидимости за счет использования постоянного контроля помеховой обстановки, условий распространения радиоволн в рабочем диапазоне частот, выбора антенн с минимальным КСВ на рабочей ЗПЧ и максимумом диаграммы направленности антенны в направлениях на абонентов, выбора минимальных уровней мощности радиостанций мобильных устройств связи в четырех независимых радиосетях (радионаправлениях), при минимальной высоте подъёма мачтой ТМ 1 антенн 5.1÷5.4 на мобильном узле связи, обеспечение ретрансляции и контроля окружающей местности в диапазонах работы технических средств разведки (ТСР).
Технический результат - расширение функциональных возможностей: повышение разведзащищённости и помехозащищённости, качества и надёжности радиосвязи МУС, обеспечиваемой в условиях активной работы систем радиоэлектронного подавления противника с обеспечением контроля радиообстановки в зоне работы мобильного узла связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое антенно-мачтовое устройство с несимметричной и симметричными антеннами | 2023 |
|
RU2813238C1 |
| Автоматическое антенно-мачтовое устройство с механизмами подъема | 2023 |
|
RU2813629C1 |
| МНОГОМОДОВАЯ МАЧТОВАЯ АНТЕННА | 2006 |
|
RU2313164C1 |
| ПОДВИЖНАЯ КОМПЛЕКСНАЯ ИСПЫТАТЕЛЬНАЯ АППАРАТНАЯ | 2017 |
|
RU2651779C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ СОТОВОЙ СВЯЗИ | 2015 |
|
RU2577525C1 |
| Мобильная аппаратная контроля безопасности связи | 2023 |
|
RU2823040C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ МНОГОКАНАЛЬНОЙ РАДИОРЕЛЕЙНОЙ СВЯЗИ | 2018 |
|
RU2689771C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ МНОГОКАНАЛЬНОЙ РАДИОСВЯЗИ | 2017 |
|
RU2654214C1 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
| КОМБИНИРОВАННАЯ РАДИОСТАНЦИЯ | 2012 |
|
RU2490794C1 |
Использование: устройство относится к подвижной военной технике связи и может быть использовано при модернизации и создании мобильных узлов связи (МУС) на различных транспортных базах (ТБ), для обеспечения работы каналов связи радиостанций (РС) диапазонов (30-520) МГц при минимальной радиовидимости и в условиях активной работы систем радиоэлектронного противодействия (РЭП) противника (воздействия сосредоточенных преднамеренных помех). Технический результат: расширение функциональных возможностей, повышение разведзащищённости и помехозащищённости, качества и надёжности радиосвязи мобильных узлов связи (МУС), обеспечиваемой в условиях активной работы систем радиоэлектронного подавления противника с обеспечением контроля радиообстановки в зоне работы МУС. Сущность: в устройство введены четвертая штыревая антенна (5.4) с четвертым механизмом подъема (4.4), второй коммутатор (3.2) управления механизмами подъема антенн и три радиостанции (7.1.2÷7.1.4), при этом выходы с первой по четвертую радиостанций соединены с соответствующими входами коммутатора антенн (7.5). Автоматизированное рабочее место (АРМ) (7.4) содержит ПЭВМ (7.4.1), автоматизированный метеокомплект (АМК) (7.4.2) и анализатор спектра диапазона частот (7.4.3), который соединен со своим комплектом антенн (5.5). Выход автоматизированного метеокомплекта (АМК) (7.4.2) соединен с наружным оборудованием (5.6). Кроме того, ПЭВМ, АМК, анализатор спектра диапазона частот, коммутатор антенн соединены по сети Ethernet между собой и с входами с первой по четвертую радиостанций. 2 з.п. ф-лы, 2 ил.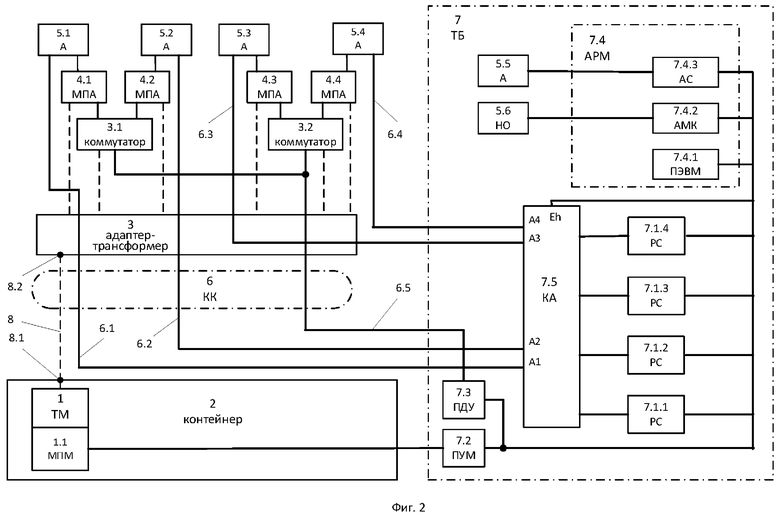
1. Антенно-мачтовое устройство с механизмами подъема, содержащее телескопическую мачту с механизмом подъема, помещенные в контейнер, который закреплен снаружи или внутри корпуса транспортного средства (ТС); мачтовый адаптер-трансформер, жестко закрепленный на верхнем звене телескопической мачты, на котором расположены первый, второй и третий механизмы подъема антенн с соответствующими штыревыми антеннами, первый коммутатор управления механизмами подъема антенн, соединенный с первым, вторым и третьим механизмами подъема антенн по соответствующим низкочастотным (НЧ) кабелям, а также механизм укладки кабеля, основой которого является пружина, на витках которой закреплен комбинированный кабель, состоящий из двух высокочастотных (ВЧ) и одного НЧ кабелей, помещенных в кожух-чехол, при этом элемент крепления верхнего конца пружины зафиксирован на мачтовом адаптере, а нижний конец пружины - на элементе крепления на контейнере;
в обитаемом объеме ТС размещены автоматизированное рабочее место (АРМ), имеющее связь с пультом управления мачтой (ПУМ), пультом дистанционного управления механизмами подъема антенн и первой радиостанцией, при этом ПУМ соединен с механизмом подъема мачты, а пульт дистанционного управления механизмами подъема антенн соединен по НЧ кабелю с первым коммутатором управления механизмами подъема антенн, отличающееся тем, что
введены четвертая штыревая антенна с четвертым механизмом подъема и второй коммутатор управления механизмами подъема антенн, соединенный с третьим и четвертым механизмами подъема антенн по соответствующим НЧ кабелям, а также по НЧ кабелю, входящему в комбинированный кабель для питания и управления, - с пультом дистанционного управления механизмами подъема антенн;
АРМ включает персональную электронно-вычислительную машину (ПЭВМ), анализатор спектра диапазона частот, соединенный с комплектом своих антенн, и автоматизированный метеокомплект (АМК) с наружным оборудованием, при этом ПЭВМ, АМК и анализатор спектра диапазона частот имеют связь по сети Ethernet между собой и с входами с первой по четвертую радиостанций, выходы которых соединены с соответствующими входами коммутатора антенн, имеющего связь по сети Ethernet с АРМ, кроме того, выходы коммутатора антенн соединены по ВЧ кабелям для питания с соответствующими с первой по четвертую антеннами, при этом в качестве мачтового адаптера использован адаптер-трансформер.
2. Устройство по п. 1, отличающееся тем, что в качестве подъемного устройства мачты использованы электрический, или пневматический, или гидравлический приводы.
3. Устройство по п. 1, отличающееся тем, что в качестве подъемных устройств штыревых антенн использованы электрические приводы.
| Автоматическое антенно-мачтовое устройство с механизмами подъема | 2023 |
|
RU2813629C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| СПОСОБ ПОЛУЧЕНИЯ ГОМОГЕННОЙ ЭЛЕКТРОНООБМЕННОЙМЕМБРАНЫ | 0 |
|
SU219173A1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2010 |
|
RU2419925C1 |
| CN 112859105 A, 28.05.2021 | |||
| Приспособление для наполнения сжатым воздухом камер пневматических автошин | 1930 |
|
SU28794A1 |
| Подъемно-мачтовое устройство | 2016 |
|
RU2622516C1 |

