Изобретение относится к электроэнергетике и может быть использовано для автоматического облета воздушных (высоковольтных) линий электропередачи (ВЛЭП) и диагностики дефектов: в линейной изоляции, при монтаже проводов и линейной арматуры, набросов на провода, их частичных порывов и т.п.
Известен способ автопилотирования беспилотного летательного аппарата (БпЛА) над воздушной линией электропередачи, основанный на применении глобальных навигационных систем ГЛОНАСС, GPS и т.п. [Мониторинг состояния воздушных линий электропередачи с использованием беспилотного летательного аппарата / В. П. Дикой, А. А. Левандовский, Р. С. Арбузов [и др.] // Энергия единой сети. - 2014. - № 2(13). - С. 16-25]. Использование таких систем позволяет проложить географическую трассу полета БпЛА, который на своем борту перемещает диагностическую аппаратуру и записывает некоторую измерительную информацию, ее обработка позволяет выявить дефекты и в дальнейшем устранить их. Однако минимальная высота полета БпЛА при таком способе автопилотирования сильно ограничена, поэтому точность получения диагностических параметров мала из-за большой удаленности измерительной аппаратуры от диагностируемого объекта. Например, качество фото и видеосъемки элементов ВЛЭП часто неудовлетворительно; тепловизионный контроль, а также контроль по высокочастотному и ультрафиолетовому излучениям становятся малоэффективными. Кроме того, отмечается повышенная аварийность самих БпЛА при облете ВЛЭП на близком расстоянии с использованием указанного способа автопилотирования.
Известен также способ автопилотирования БпЛА над воздушной линией электропередачи, принятый в качестве прототипа, в котором ориентация БпЛА вдоль трассы ВЛЭП осуществляется путем измерения напряженности электрического поля (ЭП) посредством емкостных датчиков [Патент 2421746 (от 10.02.2010), МПК G01R31/08. Способ диагностики высоковольтной линии электропередачи /Качесов В.Е., Лебедев Д.Е.// БИ №17, 2011]. Для измерения напряженности электрического поля ЛЭП, которое используется для автоматического пилотирования БпЛА, применяются емкостные датчики, формирующие электрические сигналы в электрическом поле ВЛЭП. В случае диагностирования ВЛ при высокой влажности воздуха, чувствительность датчиков падает, они могут вносить заметную погрешность измерения электрического поля ЛЭП из-за появления между измерительными электродами конденсаторов значительной активной проводимости. Разностный сигнал датчиков электрического поля, используемый для вдоль трассовой ориентации летательного аппарата, может иметь малые значения, недостаточные для надежного управления аппаратом. Кроме того, сам БпЛА искажает электрическое поле ВЛЭП, и сигналы обоих электрических датчиков, находящихся на концах крыла, с трудом могут быть использованы для вдоль трассовой ориентации летательного аппарата. Получение достаточного для управления разностного сигнала ограничивается размером крыла БпЛА.
Таким образом, анализ современного состояния уровня техники показывает, что задачей изобретения является создание более надежного способа управления бесплотным летательным аппаратом в условиях влажной окружающей воздушной среды, а также возможность применения автопилотирования на БпЛА с малым размером крыла.
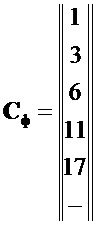
Для управления беспилотным летательным аппаратом по высоте (вертикальной координате “Y”) применяют так же, как в [2], полусумму напряжений датчиков напряженности электрического поля (E) промышленной частоты, а для определения горизонтального направления полета БпЛА - непрерывно получаемые с борта летательного аппарата фотографии линии электропередачи. На оцифрованных фотографиях выделяют изображения проводов. Для этого сначала переводят цветное изображение в черно-белое с градациями яркости. Формируют дискретный набор векторов направлений в диапазоне углов α=0-180°, шаг изменения углов составляет от одного до несколько градусов. Длину вектора изображения Lx приблизительно принимают равной 0.01-0.1 от количества пикселей изображения по оси координат «X» NX, т.е. LX≅(0.01-0.1)NX. Обработку фотографического изображения начинают с нижнего левого края, отступая к центру изображения на длину вектора LX. Для каждой точки (пикселя) обрабатываемого фрагмента изображения, количество которых равно NX-2LX, рассчитывают среднее значение яркости (СЗЯ) каждого вектора (луча) изображения
 ,
,
где Ik - яркость k-го пикселя. Количество таких векторов изображения для каждой точки изображения равно 2Lx-1. Для каждой точки изображения также вычисляют среднеквадратическое отклонение (СКО) яркости векторов изображения
 .
.
СКО яркости каждого вектора изображения σ нормируют по отношению к собственному среднему значению яркости:
 .
.
Для всего блока обрабатываемого изображения размером (NX-2LX)x LX находят максимальные значения средней в векторе изображения яркости ( ) и разброса
) и разброса  , по отношению к которым, соответственно, нормируют средние яркости
, по отношению к которым, соответственно, нормируют средние яркости  и СКО яркости
и СКО яркости  :
:
 ,
, 
Для каждого пикселя изображения, расположенного на оси “X” в диапазоне значений [LX; NX-LX], получают вектор модифицированной яркости  . Находят вектор с максимальным значением модифицированной яркости (с максимальной яркостью (I*) и минимальным ее СКО (
. Находят вектор с максимальным значением модифицированной яркости (с максимальной яркостью (I*) и минимальным ее СКО ( )) и помещают это значение в вектор Im. Отсчеты пикселей по оси «Х» в векторе Im условно заменяют временем t c дискретным шагом одна секунда. Вектор Im(t) пропускают через двусторонний фильтр низших частот и получают низкочастотный сигнал IНЧ. Его вычитают из сигнала
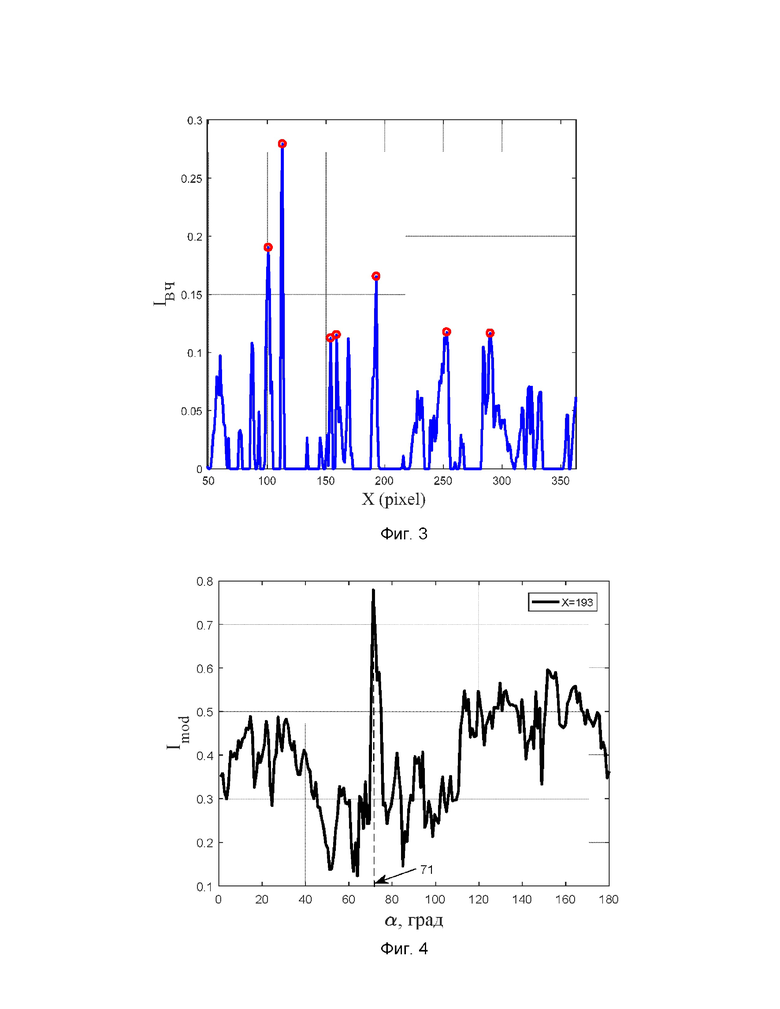
)) и помещают это значение в вектор Im. Отсчеты пикселей по оси «Х» в векторе Im условно заменяют временем t c дискретным шагом одна секунда. Вектор Im(t) пропускают через двусторонний фильтр низших частот и получают низкочастотный сигнал IНЧ. Его вычитают из сигнала  , оставляя в сигнале высокочастотную компоненту IВЧ=Im-IНЧ; отрицательные значения полученного вектора (IВЧ) обнуляют. Из этого вектора выбирают количество локальных максимумов (фиг.3), включая один глобальный, равное количеству фазных проводов и грозозащитных тросов (Nпров). Для пикселей, выделенных из массива IВЧ и соответствующих максимумам IВЧ, по зависимости модифицированной яркости вектора изображения (
, оставляя в сигнале высокочастотную компоненту IВЧ=Im-IНЧ; отрицательные значения полученного вектора (IВЧ) обнуляют. Из этого вектора выбирают количество локальных максимумов (фиг.3), включая один глобальный, равное количеству фазных проводов и грозозащитных тросов (Nпров). Для пикселей, выделенных из массива IВЧ и соответствующих максимумам IВЧ, по зависимости модифицированной яркости вектора изображения ( ) от его угла α, выбирают угол расположения фазного провода или грозозащитного троса на плоскости “X-Y”. Углы α запоминают. Вычисляют X-координаты концов векторов изображений, которым соответствуют положения фазных проводов и грозозащитных тросов. «X»-координату конца вектора изображения, т.е. i-го пикселя Ni с координатами (Xк,Yк), соответствующего концу провода на отрезке изображения высотой LX, рассчитывают как
) от его угла α, выбирают угол расположения фазного провода или грозозащитного троса на плоскости “X-Y”. Углы α запоминают. Вычисляют X-координаты концов векторов изображений, которым соответствуют положения фазных проводов и грозозащитных тросов. «X»-координату конца вектора изображения, т.е. i-го пикселя Ni с координатами (Xк,Yк), соответствующего концу провода на отрезке изображения высотой LX, рассчитывают как
 , (1)
, (1)
где Xн - X-координата пикселя, из которого направлен вектор изображения; Xк - соответственно, координата конца вектора изображения.
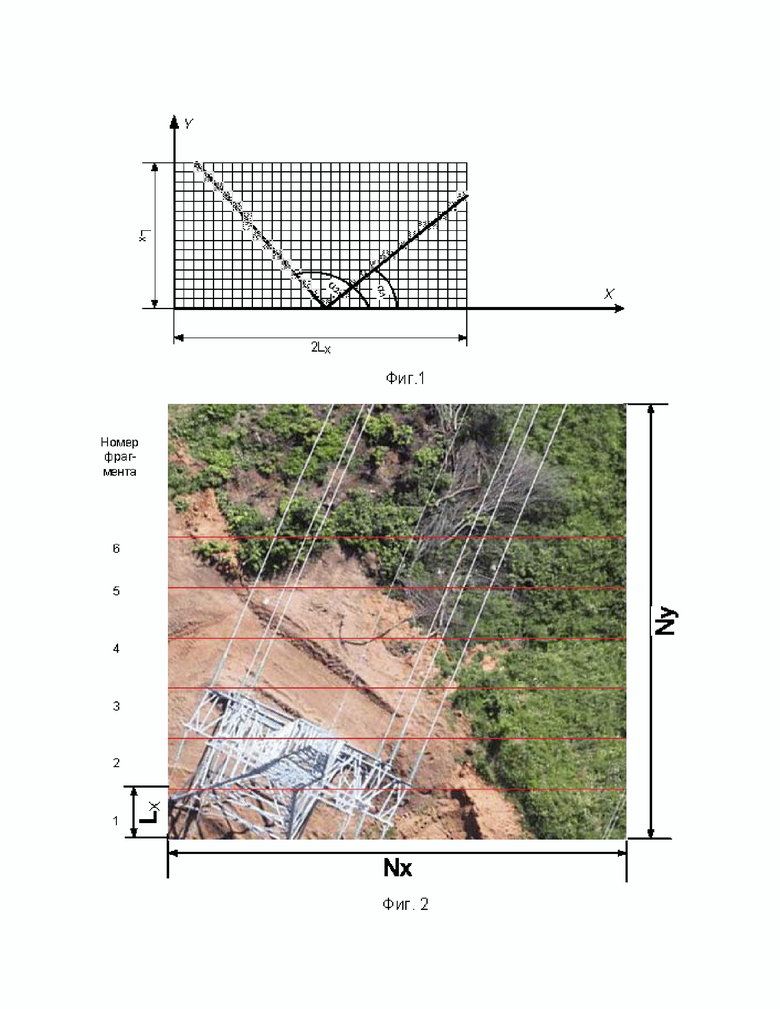
Поиск проводов воздушной линии электропередачи повторяют смещением области поиска по оси “Y” на количество пикселей, равное LX (фиг.2). Находят новые координаты пикселей, из которых предположительно исходят (или продолжаются) провода. Рассчитывают абсолютные погрешности между координатами конца предыдущего вектора изображения (провода) и началом следующего ( ):
):
 .
.
Если относительная погрешность совпадения координат ΔX*=100⋅ΔX/LX предполагаемого конца провода на предыдущем фрагменте изображения и начала координат на следующем фрагменте менее 20% (т.е. ΔX*<20%) , а также углы векторов изображения α на предыдущем участке и последующем не отличаются более чем на 5° (т.е. |Δα|<5°), то принимают, что новый вектор изображения является продолжением предыдущего и представляет собой фазный или грозозащитный провод. Если относительная погрешность совпадения координат ΔX* или различие углов векторов изображения Δα больше заданных порогов, то найденный на предыдущем фрагменте изображения вектор игнорируют в дальнейшем распознавании проводов.
Для каждого фрагмента изображения высотой LX подсчитывают количество связей Сi,k распознанных проводов с проводами на предыдущем фрагменте изображения и последующем. Если на предыдущем фрагменте изображения провод имел связь с еще более предшествующим(и), то количество связей для распознанного провода соответствующим образом увеличивают.
Поиск фазных проводов линии в каждом новом фрагменте изображения выполняют до тех пор, пока в нем не будет распознано количество связей Ci не менее, чем количество проводов на ВЛЭП (Nпров), т.е.
 .
.
После распознавания (подсчета) заданного количества связей Сi≥Nпров и некоторого количества проводов N, путем усреднения находят угол наклона найденных проводов по отношению к оси “X” на предпоследнем и последнем фрагментах изображения:
 ,
,
где Nпред и Nпосл - количество проводов, распознанных, соответственно, на предпоследнем и последнем фрагментах изображения, а также угол отклонения летательного аппарата от вдоль трассовой траектории полета (вдоль оси “Y”).
 .
.
Летательному аппарату подают команду управления на поворот его на рассчитанный угол отклонения αоткл в горизонтальной плоскости “X-Y”.
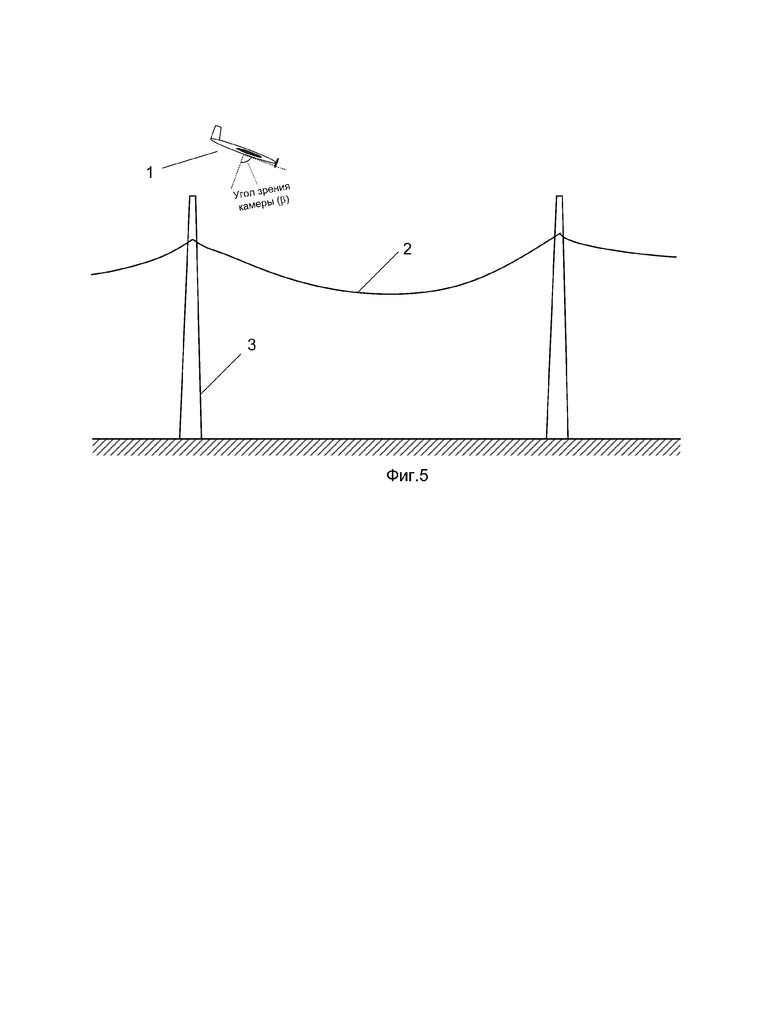
На фиг.1 показана область обработки изображения (матрица) и в качестве примера векторы изображения, характеризующиеся некоторыми углами α1 и α2, для которых рассчитываются средние значения яркости пикселей и СКО яркости. На фиг. 2 показана оцифрованная фотография воздушной линии электропередачи (вид сверху), на которой выделены 6 фрагментов изображения высотой LX, подвергающиеся обработке по поиску на них фазных проводов и грозозащитных тросов (ГТ). На фиг.3 приведена зависимость максимумов модифицированной яркости вектора изображения после ее фильтрации и обнуления отрицательных значений (IВЧ) для первого фрагмента изображения, представленного на фиг.2. На фиг. 4 показана зависимость модифицированной яркости вектора изображения Imod от его угла α для одного из пикселей на первом фрагменте (X=193). Фиг.5 показывает угол зрения (телесный угол β) фотокамеры, устанавливаемой на борту беспилотного летательного аппарата (1), который пролетает над линией электропередачи, состоящей из проводов (2) и опор (3).
Способ осуществляют следующим образом. На концах крыла БпЛА устанавливают емкостные датчики измерения переменного ЭП ВЛЭП промышленной частоты и фотокамеру, угол зрения (фиг.5) которой позволяет получать фотографическое изображение проводов ВЛЭП. БпЛА поднимают над ВЛЭП в ручном (радиоуправляемом) режиме и направляют вдоль трассы. Емкостными датчиками измеряют напряженность электрического поля на левом (EЛ) и правом (EП) концах крыла и находят среднее значение ECР=(EЛ+EП)/2, сравнивают его с наперед заданным значением уставки E0 и определяют высоту полета БпЛА: при превышении измеренной средней напряженностью (ECР) уставки E0, т.е. при выполнении условия ECР>E0 подают команду на увеличение высоты полета, при условии ECР<E0 - на снижение. Посредством фотокамеры с небольшой дискретностью по времени (доли секунды) получают изображение воздушной ЛЭП, включая фазные провода и грозозащитные тросы. Начиная с левого нижнего угла цифрового изображения (координата точки изображения (пикселя) Х=0, Y=0) выполняют поиск изображений фазных проводов и грозозащитных тросов. Для радиальных векторов, исходящих под углами αk (диапазон изменения k=50…200) из каждого пикселя изображения, за вычетом отступов от краев изображения по оси абсцисс на величину LX, рассчитывают среднее значение яркости вектора изображения  и СКО яркости. СКО яркости нормируют по отношению к средней яркости вектора изображения. Для всего фрагмента обрабатываемого изображения размером (NX-2LX)xLX находят максимальные значения средней яркости всех векторов и максимальное СКО, по отношению к которым еще раз нормируют значения средней яркости и СКО векторов изображений. Нормированное значение средней яркости на всем фрагменте изображения -
и СКО яркости. СКО яркости нормируют по отношению к средней яркости вектора изображения. Для всего фрагмента обрабатываемого изображения размером (NX-2LX)xLX находят максимальные значения средней яркости всех векторов и максимальное СКО, по отношению к которым еще раз нормируют значения средней яркости и СКО векторов изображений. Нормированное значение средней яркости на всем фрагменте изображения -  ; нормированное значение СКО -
; нормированное значение СКО -  . Изображение провода на фотоснимке, которое представляется вектором изображения, характеризуется наибольшей средней яркостью и наименьшим ее СКО. Для точек (пикселей) изображения, количество которых на оси “X” равно (NX-2LX), находят модифицированную среднюю яркость
. Изображение провода на фотоснимке, которое представляется вектором изображения, характеризуется наибольшей средней яркостью и наименьшим ее СКО. Для точек (пикселей) изображения, количество которых на оси “X” равно (NX-2LX), находят модифицированную среднюю яркость  , которая максимальна для ярких протяженных однородных изображений, в качестве которых могут выступать изображения фазных проводов и грозозащитных тросов ВЛЭП. В векторах модифицированной средней яркости
, которая максимальна для ярких протяженных однородных изображений, в качестве которых могут выступать изображения фазных проводов и грозозащитных тросов ВЛЭП. В векторах модифицированной средней яркости  (
( ) находят максимальные значения для каждого пикселя, из которых формируют вектор
) находят максимальные значения для каждого пикселя, из которых формируют вектор  . Вектор Im условно представляют функцией времени, подменяя координату X на изображении отсчетом по времени t. Вектор Im фильтруют двусторонним фильтром низших частот, и выделяют в векторе низкочастотную составляющую (IНЧ), которую вычитают из полного сигнала (Im) и выделяют, таким образом, лишь высокочастотную составляющую модифицированной максимальной яркости вектора изображения (IВЧ=Im-IНЧ). Зависимость положительных значений максимальной модифицированной яркости вектора изображения от координаты пикселя «Х» показана на фиг.3. На положительных значениях вектора яркости в высокочастотном спектре IВЧ находят количество максимумов, равное количеству фазных проводов и ГТ. В соответствии с каждым найденным максимумом определяют номер пикселя (Xн), из которого исходит вектор изображения с максимальной модифицированной яркостью IВЧ. Для каждой точки изображения строят зависимость модифицированной яркости Imod вектора изображения от угла α и находят на ней угол, соответствующий максимальному значению Imod. Полагают, что вектор изображения совпадает с направлением провода или грозотроса. У найденного вектора изображения, характеризуемого начальной координатой по оси абсцисс ХН и неким углом α, находят координату конца вектора ХК в соответствии с выражением (1).
. Вектор Im условно представляют функцией времени, подменяя координату X на изображении отсчетом по времени t. Вектор Im фильтруют двусторонним фильтром низших частот, и выделяют в векторе низкочастотную составляющую (IНЧ), которую вычитают из полного сигнала (Im) и выделяют, таким образом, лишь высокочастотную составляющую модифицированной максимальной яркости вектора изображения (IВЧ=Im-IНЧ). Зависимость положительных значений максимальной модифицированной яркости вектора изображения от координаты пикселя «Х» показана на фиг.3. На положительных значениях вектора яркости в высокочастотном спектре IВЧ находят количество максимумов, равное количеству фазных проводов и ГТ. В соответствии с каждым найденным максимумом определяют номер пикселя (Xн), из которого исходит вектор изображения с максимальной модифицированной яркостью IВЧ. Для каждой точки изображения строят зависимость модифицированной яркости Imod вектора изображения от угла α и находят на ней угол, соответствующий максимальному значению Imod. Полагают, что вектор изображения совпадает с направлением провода или грозотроса. У найденного вектора изображения, характеризуемого начальной координатой по оси абсцисс ХН и неким углом α, находят координату конца вектора ХК в соответствии с выражением (1).
Поиск проводов Nпров повторяют, переходя к следующему фрагменту изображения, смещаясь по оси ординат “Y” на количество пикселей, равное LX. В случае совпадения координаты начала вектора изображения ХН в новом фрагменте с концом вектора в предыдущем фрагменте ХК с погрешностью не более 20% по отношению к длине обрабатываемого фрагмента LX, и сохранения углов (направлений) векторов на соседних фрагментах изображения с погрешностью не более 5°, считают, что провод найден и присутствует, как минимум, в двух соседних фрагментах изображения.
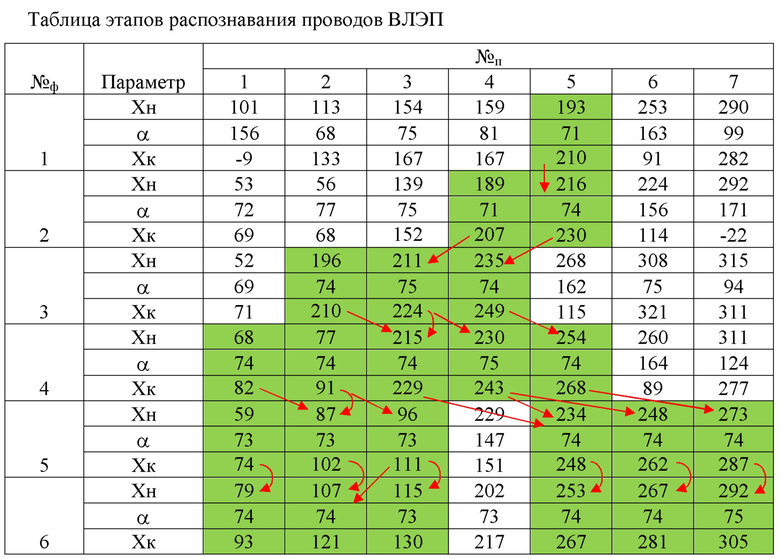
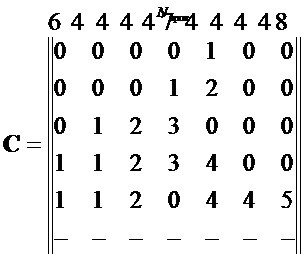
После каждой итерации распознавания проводов ВЛЭП подсчитывают их количество и количество связей проводов на текущем (обрабатываемом) и предыдущих фрагментах изображения. Количество распознанных связей на каждом обрабатываемом фрагменте отмечают в матрице инцидентности. Пример этапов распознавания проводов на ВЛЭП, фотография которой показана на фиг.3, отражен в таблице, где стрелки указывают наличие связей предполагаемых проводов, распознанных на различных фрагментах изображения. На первом фрагменте (№ф=1) распознано 7 векторов изображения, но с большим разбросом углов их ориентации в плоскости “X-Y”. Только 5-й вектор (предполагаемый провод - №п=5) имеет связь с проводом на следующем фрагменте. На втором фрагменте только два найденных вектора (4-й и 5-й) имеют направления, близкие с направлениями векторов на 3-м фрагменте изображения. В заполненной матрице инцидентности С, показанной ниже, описанным связям соответствует единица в первой строке и 5-м столбце; во второй строке единица в 4-м столбце соответствует связи с 3-м фрагментом, а двойка в 5-м столбце указывает на связи вектора как с 1-м, так и 3-м фрагментами изображения. На 3-м фрагменте распознаны 3 предполагаемых провода и выявлено 6 связей (не учитывая двойные): 3 связи - на предыдущие фрагменты, 3 - на следующий.
 ,
,
На 4-м фрагменте изображения распознано 5 проводов (с 1-го по 5-й), которые имеют 6 связей с предыдущими фрагментами изображения и 5 связей с последующим, а общее количество связей на этом фрагменте изображения Cф4=11. На этом этапе полагают, что провода, начиная с 4-го фрагмента изображения, надежно распознаны (Cф4≥Nпров). Средний угол их направления на 3-м и 4-м фрагментах изображения составляет  ≅74°, поэтому угол отклонения БпЛА от трассы (т.е. от правильного курса полета) составляет в соответствии с (4) αоткл=16°. Используя угол отклонения от курса, воздействуют на элероны и киль БпЛА и корректируют направление его полета в горизонтальной плоскости “X-Y”. Основной причиной нераспознавания проводов на первых фрагментах изображения, представленного на фиг.2, является наличие на них частичного изображения опоры ВЛЭП.
≅74°, поэтому угол отклонения БпЛА от трассы (т.е. от правильного курса полета) составляет в соответствии с (4) αоткл=16°. Используя угол отклонения от курса, воздействуют на элероны и киль БпЛА и корректируют направление его полета в горизонтальной плоскости “X-Y”. Основной причиной нераспознавания проводов на первых фрагментах изображения, представленного на фиг.2, является наличие на них частичного изображения опоры ВЛЭП.
Таким образом, автопилотирование БпЛА вдоль трассы линии электропередачи с целью ее диагностики выполняется надежно, не взирая на искажение ЭП самим летательным аппаратом и на влажную погоду, когда точность измерения разностного сигнала от датчиков ЭП мала. В силу того, что разностный сигнал емкостных датчиков не используется для управления, БпЛА может иметь малый размах крыла.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
| СПОСОБ АЭРОДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2011 |
|
RU2483314C1 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| СПОСОБ ПРИМЕНЕНИЯ РОБОТИЗИРОВАННОГО ТАХЕОМЕТРА И БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ОБЪЕКТА | 2023 |
|
RU2809177C1 |
| Способ обнаружения и распознавания малоразмерных объектов на изображениях при помощи алгоритма машинного обучения и устройство для его реализации | 2022 |
|
RU2799078C1 |
| Способ и устройство бесконтактного дистанционного контроля технического состояния высоковольтных линейных изоляторов воздушных линий электропередач | 2020 |
|
RU2753811C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНЫХ РАСПРЕДЕЛЕНИЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2018 |
|
RU2692736C1 |
Использование: изобретение относится к электроэнергетике и может быть использовано для автопилотирования беспилотного летательного аппарата (БпЛА), следующего вдоль трассы воздушной линии электропередачи (ВЛЭП) в целях ее диагностики (локации дефектов изоляции линий электропередачи, монтажа фазных проводов и арматуры, набросов на провода и т.д.). Сущность: способ автопилотирования беспилотного летательного аппарата, следующего вдоль воздушной линии электропередачи, заключается в измерении с помощью емкостных датчиков напряженности электрического поля на концах крыла и автоматическом установлении высоты полета. Для вдольтрассового управления летательным аппаратом на борту БпЛА устанавливают фотокамеру и выполняют непрерывное фотографирование. На фрагментах изображения рассчитывают среднеквадратические яркости и среднеквадратические отклонения (СКО) векторов изображения. Полагают, что средние значения яркости проводов и соответственно векторов изображения имеют максимальное значение по отношению к средней яркости всего фрагмента изображения, а СКО яркости этих векторов изображения наоборот минимальны. На основе обработки фрагментов изображения (большого набора векторов), направленных из каждого пикселя изображения в направлении полета, распознают провода ВЛЭП, определяют их средний угол отклонения от вектора направления следования БпЛА и подают команду на управление летательным аппаратом для коррекции направления его полета в плоскости поверхности земли. Технический результат: повышение надежности навигации беспилотного летательного аппарата в условиях повышенной влажности окружающего воздуха, а также возможность применения БпЛА с небольшим размахом крыла. 5 ил.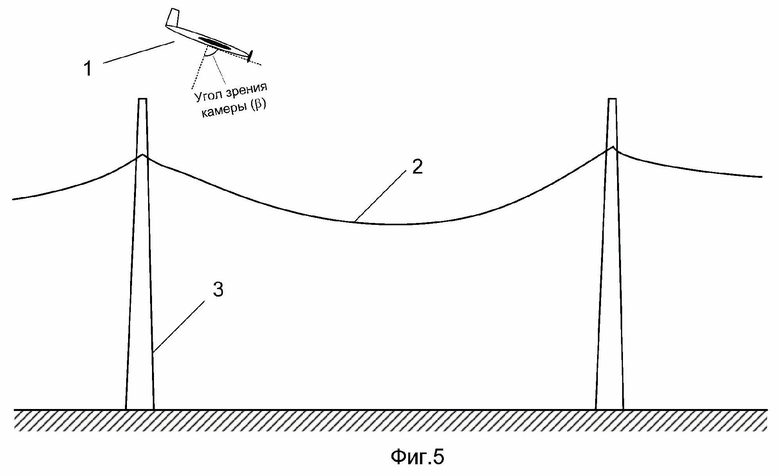
Способ автопилотирования беспилотного летательного аппарата над воздушной линией электропередачи, заключающийся в измерении с помощью емкостных датчиков напряженности электрического поля на концах крыла и автоматическом установлении высоты полета, отличающийся тем, что для вдольтрассового управления беспилотным летательным аппаратом в плоскости поверхности земли «X-Y» выполняют непрерывное цифровое фотографирование линии электропередачи, находящейся под летательным аппаратом, на оцифрованных фотографиях переводят цветное изображение в черно-белое с градациями яркости, на изображении выделяют фрагменты изображения, на которых с помощью расчета средней яркости векторов изображения и ее среднеквадратического отклонения распознают фазные провода и грозозащитные тросы, определяют углы направления α фазных проводов и грозозащитных тросов относительно продольного направления установки фотокамеры на беспилотном летательном аппарате и соответственно относительно его текущего направления полета, усредняют углы направления α распознанных проводов и вычисляют угол отклонения αоткл летательного аппарата относительно трассы линии электропередачи, значение вычисленного угла отклонения используют для пропорционального управления беспилотным летательным аппаратом в горизонтальной плоскости земли «X-Y».
| CN 105955293 A, 21.09.2016 | |||
| CN 107515621 B, 15.09.2020 | |||
| CN 202071987 U, 14.12.2011 | |||
| CN 102591357 A, 18.07.2012 | |||
| US 9037314 B2, 19.05.2015 | |||
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2000 |
|
RU2171499C1 |
| Беспилотный летательный аппарат, предназначенный для диагностики, технического обслуживания и ремонта высоковольтной воздушной линии электропередачи, и способ выравнивания потенциалов при посадке беспилотного летательного аппарата на находящуюся под напряжением высоковольтную воздушную линию электропередачи | 2021 |
|
RU2775038C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ОБЪЕКТОВ ЭЛЕКТРОЭНЕРГЕТИКИ | 2021 |
|
RU2776589C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2792974C1 |

