Изобретение относится к области авиационной техники, в частности, к способам автоматической посадки летательных аппаратов с применением бортовой мультиспектральной системы технического зрения и радиолокационной системы с целью ее полной автоматизации, и может быть использовано для обеспечения автономной, всепогодной и всесуточной посадки самолетов и других воздушных судов транспортной категории на взлетно-посадочную полосу (ВПП).
Из данной области техники известны следующие технические решения.
Известен способ наведения самолета при инструментальном заходе на посадку с применением курсоглиссадной системы (КГС) до высоты принятия решения, при котором при помощи радиотехнических средств определяют отклонение самолета от курсовой и глиссадной линий. Например, [Ю.Г.Кассин и др., Автоматическое управление самолетом при заходе на посадку, г. Рига, Институт инженеров ГА, 1979 г].
Недостатком данного способа является малое количество КГС категории III в виду высокой их стоимости, в России всего 6 аэродромов, оснащенных оборудованием категории III. Таким образом, подавляющее большинство КГС в России не позволяет выполнять полностью автоматическую посадку по категории III, и в большинстве случаев автоматическая посадка осуществляется до высоты принятия решения, ниже которой пилот осуществляет визуальное пилотирование.
Известен способ наведения самолета при инструментальном заходе на посадку с применением спутниковой навигационной системы, который позволяют выполнять заход на посадку в автоматическом режиме до высоты принятия решения по категории I [ИКАО Руководство по глобальной навигационной спутниковой системе (GNSS)].
Недостатком данного способа является то, что современный достижимый уровень целостности навигационных данных систем посадки с применением систем спутниковой навигации соответствует оборудованию категории I, т.е. посадка в автоматическом режиме может совершаться до высоты принятия решения в 60 м, после чего пилот должен взять управление на себя и выполнять визуальную посадку.
Известен способ инерциальной/визуальной навигации при посадке беспилотного летательного аппарата на основе линейных характеристик по патенту RU 2055785, в соответствии с которым предлагается вычислять положение воздушного судна по трем маркерам из множества (два из одного ряда и один из другого ряда продольно расположенных маркеров).
В связи с тем, что реальные ВПП не являются плоскостями на одной высоте, разные огни могут располагаться на разных высотах, в результате чего и разные тройки маркеров могут приводить к разным результатам в зависимости от сочетания их высот. При этом для того, чтобы узнать высоты обнаруженных маркеров для точного расчета координат, необходимо однозначно их идентифицировать, что крайне сложно, так как представленный способ подразумевает сканирование пространства с применением оптических датчиков с узким полем зрения. По этой причине маркеры, попавшие в поле зрения камеры в процессе сканирования и за которыми осуществляется слежение, могут быть произвольными. Данное обстоятельство увеличивает погрешность определения положения воздушного судна (ВС), например, в случае необнаружения начальных маркеров из-за их отказа или по другим причинам.
Указанный способ преимущественно предназначен для самолетов малой авиации и необорудованных ВПП и малоприменим для самолетов транспортной категории, поскольку подразумевает необходимость оснащения каждой ВПП основными и дополнительными маркерами с каждой стороны, что экономически нецелесообразно, так как требует дооснащения всех ВПП, а также создания дополнительной базы данных, в которых будет хранится информация о расположении дополнительных маркеров для каждой ВПП. В то время как большинство ВПП транспортной авиации уже оснащены светотехническим оборудованием и маркировкой.
Известен способ предоставления подсказок оператору летательного аппарата (заявка № US2022315242), при котором определяют момент, когда летательный аппарат находится на конечном этапе захода на посадку; производят обработку множества наземных изображений ВПП, полученных от камеры, определяют полосы движения на обработанных изображениях местности, определяют, соответствует ли идентифицированная полоса назначенной ВПП на основе относительного положения или относительной геометрии идентифицированной полосы, обнаруживают при выполнении посадки левый и правый боковой край, передний край и осевую линию назначенной ВПП, в соответствии с указанной информацией определяют положение летательного аппарата относительно осевой линии ВПП, предоставляют визуальные и/или звуковые указания оператору летательного аппарата для принятия корректирующих мер, когда его относительное положение во время посадки не совпадает с осевой линией ВПП.
Недостатком данного изобретения является то, что оно требует наличие оператора и предназначено в первую очередь для выработки рекомендаций пилоту в виде информации об отклонении от центральной осевой линии и прогноза того, что воздушное судно выполнит касание в Landing Zone. Изобретение не подразумевает интеграцию системы с автопилотом и реализацию автоматической посадки воздушного судна с применением оптических датчиков.
Известно устройство автоматического управления посадкой и способ его функционирования па патенту KR102135725, которое включает блок ввода изображения для получения сформированного изображения ВПП, блок обнаружения посадочных меток на ВПП из сформированного изображения с использованием автономного алгоритма усиления, первый блок обнаружения линий ВПП с использованием преобразования Хафа на основе градиента краев, второй блок обнаружения линий ВПП с использованием алгоритма сопоставления прямых линий на основе PCA и блок управления посадкой беспилотного самолета на основе линий ВПП, обнаруженных, первым и/или вторым блоком.
Недостатком данного изобретения является отсутствие обнаружения торцевых линий ВПП, в частности указывается, что блок управления посадкой контролирует правую линию L2 и левую линию L1 ВПП так, чтобы соблюдалась симметрия относительно центральной линии, которая проходит через исчезающую точку. Поскольку при таком подходе не учитывается положение торцевых линий, то нельзя определить удаление до ВПП, при этом возможно определение высоты и угла курса воздушного судна. Подобный подход может быть допустим для беспилотных воздушных судов (БВС), однако для авиации транспортной категории предъявляется более высокие требования к точности вычисления координат по горизонтали. В частности, погрешность в горизонтальной плоскости не должна превышать 5 м, при этом в KR102135725 продольная координата не определяется вовсе, что является недостатком данного изобретения.
Другим недостатком является то, что для приблизительной оценки положения БВС используется Landing Mark Detector. Подобные алгоритмы менее надежны и имеют низкую точность по сравнению с бортовыми навигационными средствами современных воздушных судов транспортной категории. В случае же если модуль Landing Mark Detector отсутствует как это предложено в варианте 2, требуется обработка всего изображения для поиска линий. В этом случае требуется гораздо больше времени на обработку изображения и велика вероятность неправильного обнаружения линий. В отличие от KR102135725 в предлагаемом изобретении для определения приблизительного положения воздушного судна предлагается использовать бортовые навигационные средства, а поиск осуществлять не на всем изображении или прямоугольном ROI, а лишь в окрестностях спроецированных опорных линий. Кроме того, отсутствует сопоставление априори известной информации о положении линий ВПП с обнаруженными линиями.
Известен автоматический способ управления посадкой воздушного судна (заявка № CN115050215), при котором посредством датчика технического зрения получают изображения метки ВПП, на основе полученного изображения определяют координаты положения маркеров, в соответствии с чем определяют местоположение и ориентацию летательного аппарата в мировой системе координат, направляют летательный аппарат на посадку в соответствии с указанной информацией о положении летательного аппарата.
Недостатком данного изобретения является то, что поиск метки осуществляется на всем изображении, что может потребовать очень больших вычислительных ресурсов. В предлагаемом же изобретении поиск линий ВПП осуществляется в окрестностях спроецированных на изображение опорных линий, по данным бортовых навигационных средств, что существенно снижает объем вычислений и, следовательно, снижает требования к вычислительным средствам (масса, габариты, быстродействие). Также, в формуле изобретения CN115050215 не раскрывается тип маркеров ВПП и их количество, что влияет на перечень определяемых навигационных параметров и их точность.
Известен способ автономного наведения при посадке беспилотного летательного аппарата (БПЛА) на основе технического зрения (заявка № CN115793677), при котором получают видеоизображение, снятое передней камерой БПЛА, определяют зону взлетно-посадочной полосы (ВПП), детектируют линии взлетно-посадочной полосы (левая, правая и передняя границы ВПП), на основе указанных данных выполняют оценку положения БПЛА относительно ВПП, загружают данные о положении БПЛА в систему управления полетом при осуществлении посадки.
Недостатком данного изобретения является то, что для вычисления координат используются две боковые и торцевая линии ВПП, однако при этом не учитывается положение центральной осевой линии, что снижает точность и надежность получаемых данных. Другим недостатком является то, что для первоначального обнаружения ВПП не используются данные бортовых навигационных средств и пространственные данные аэродрома, а вместо этого поиск осуществляется на всем изображении, что требует больших вычислительных затрат. Также, при таком подходе этап обнаружение ВПП становится критически важной функцией, и посадка не может начаться до тех пор, пока алгоритм детектирования не обнаружит ВПП, что может быть затруднительно в сложных метеоусловиях и при определённых характеристиках освещения. Еще одним недостатком является то, что в методе не определен источник априорной информации о пространственных данных взлетно-посадочной полосы и в способе нет операции извлечения этой информации из базы данных.
Наиболее близким по технической сущности к заявленному способу автоматической посадки воздушного судна является техническое решение, известное из источника CN115793677, и может выступать в качестве прототипа.
Задачей, на решение которой направлено заявленное изобретение, является создание способа автоматической посадки воздушного судна, позволяющего выполнять полностью автоматическую посадку воздушного судна транспортной категории по категории IIIC, что реализуется путем повышения точности определения навигационных параметров воздушного судна за счет обнаружения на изображениях, полученных посредством оптических и радио сенсоров, продольных и торцевых излучателей‒огней и торцевых и/или продольных линий маркировки ВПП и/или линий границ ВПП.
При этом, положение маркировки и огней могут быть известны с большой точностью, так как данная информация содержится в существующих базах пространственных данных аэродромов. В случае недоступности подобной информации возможно ориентироваться на международные и национальные нормативные документы, однако при этом надо учитывать, что реальное положение огней и маркировки допускает отклонения от установленного стандартами.
Технический результат заявленного изобретения заключается в повышении точности определения навигационных параметров воздушного судна.
Технический результат достигается за счет реализации способа автоматической посадки воздушного судна, при котором посредством бортовых навигационных средств определяют пространственное положение воздушного судна (ВС), от оптического сенсора получают изображение взлетно-посадочной полосы (ВПП), отличающегося тем, что из бортовой базы пространственных данных аэродрома получают пространственную информацию о ВПП, на которую осуществляется посадка ВС, по указанным данным выполняют формирование списка относительных координат опорных линий ВПП, c помощью радиолокационного сенсора формируют дополнительное изображение ВПП, совмещают изображения, полученные от оптического и радиолокационного сенсоров, формируя комбинированное изображение ВПП, фиксируют время захвата кадра изображения, выполняют проекцию опорных линий на комбинированное изображение ВПП с учетом калибровочных параметров оптического сенсора и текущего пространственного положения ВС по данным от бортовых навигационных средств, в окрестностях спроецированных опорных линий выполняют обнаружение линий ВПП на изображении, исходя из разницы между пиксельными координатами обнаруженных линий ВПП и положением спроецированных опорных линий рассчитывают пространственное положение воздушного судна, по полученным навигационным данным формируют параметры управления движением воздушным судном в виде отклонений от глиссады для передачи их в автопилот.
В предпочтительном варианте исполнения заявленного способа, в случае наличия задержки на обработку изображений, с целью ее компенсации проводят комплексирование навигационных данных, полученных от спутниковой навигационной системы и инерциальных измерительных модулей по схеме отложенной обработки с пересчетом инерциального решения от момента захвата изображений до текущего момента времени.
Поскольку традиционные системы инструментального захода на посадку такие как ILS и GLS в большинстве случаев не имеют III категории, реализация указанного способа может полностью автоматизировать посадку по категории IIIС без дополнительного наземного оборудования. При этом, в изобретении предполагается использование штатной инфраструктуры ВПП аэродромов, таких как светотехническое оборудование и маркировка, которые определяются нормативными документами ИКАО и национальными нормативными документами.
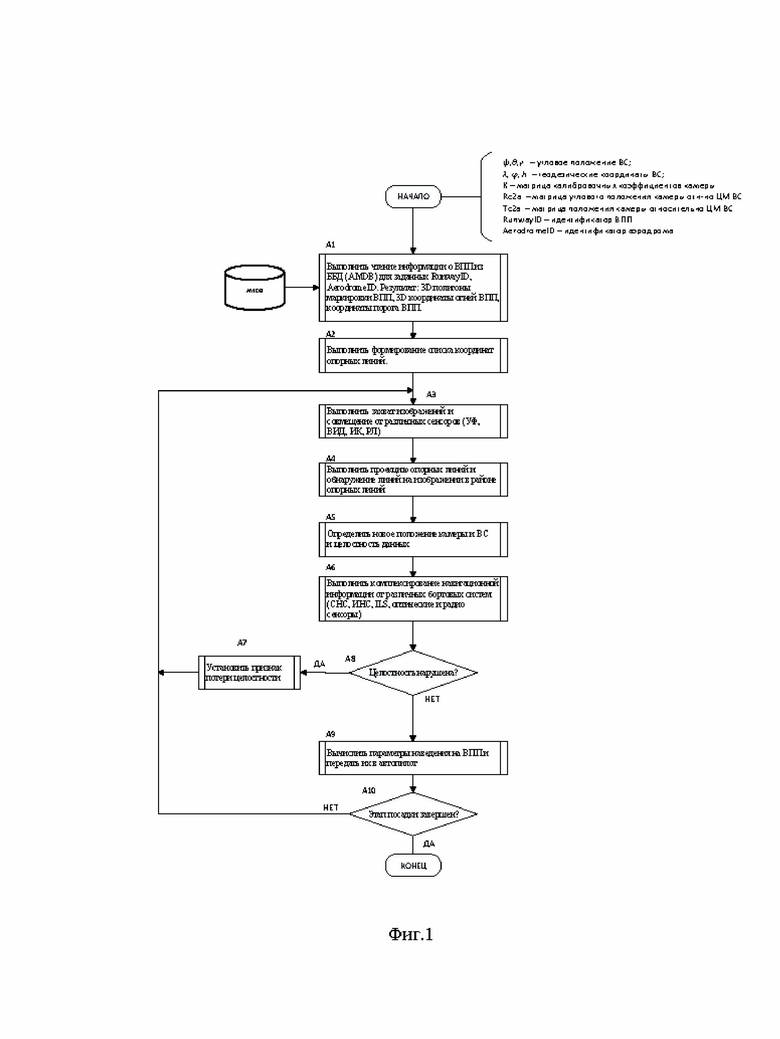
На фиг.1 представлена блок-схема, поясняющая реализацию предлагаемого способа автоматической посадки воздушного судна, где обозначены следующие этапы способа: А1 - выполняют чтение пространственной информации о ВПП из бортовой базы данных, А2 - выполняют преобразование полученных пространственных данных маркировки/огней ВПП в список опорных линий, А3 - осуществляют захват и формирование изображения, А4 - выполняют проекцию опорных линий на изображение и обнаружение линий с учетом калибровочной матрицы камеры и текущего положения воздушного судна по данным от бортовых навигационных средств, А5 - выполняют расчет текущего положения камеры, А6 - выполняют компенсацию времени, требуемого на обработку изображений, А7, А8 - выполняют проверку нарушения целостности полученного навигационного решения, А9, А10 - формируют параметры управления движением воздушным судном в виде отклонений от глиссады при заходе на посадку для передачи их в автопилот.
Заявленное изобретение осуществляется следующим образом (фиг.1).
Для реализации способа необходимы априорные данные, которые определяются на этапе подготовки данных и по результатам калибровки камеры:
– пространственные данные аэродрома;
– матрица калибровочных коэффициентов камеры  ;
;
– матрица пространственного положения камеры  относительно связанной системы координат ВС.
относительно связанной системы координат ВС.
Пространственные данные для большинства аэродромов имеются в источниках типа aerodrome mapping database (AMDB) и конвертируются в формат бортовой базы данных на этапе подготовки данных. Указанные данные могут быть представлены в виде 2D или 3D координат маркировки, посадочных огней ВПП, границ ВПП.
Матрицы  ,
,  – определяются в процессе калибровки камеры.
– определяются в процессе калибровки камеры.
В начальный момент времени используется навигационная информация, которая определяется посредством бортовых навигационных средств:
– ψ, ϑ, γ – угловое положение ВС (курс, тангаж, крен);
– φ, λ, h – геодезические координаты ВС (широта, долгота, высота);
из бортового вычислительного устройства хранения также считываются параметры камеры:
– K – матрица калибровочных коэффициентов камеры;
– Rc2a – матрица направляющих косинусов, определяющая угловое положения камеры, относительно связанной системы координат ВС;
– Tc2a – линейные координаты положения камеры относительно связанной системы координат ВС;
При этом  , где
, где  ,
,  – фокусное расстояние камеры в пиксельных размерах,
– фокусное расстояние камеры в пиксельных размерах,  – фокусное расстояние камеры в единицах длины,
– фокусное расстояние камеры в единицах длины,  ,
,  – количество пикселей на единицу длины в координатах плоскости изображения,
– количество пикселей на единицу длины в координатах плоскости изображения,  – положение главной точки камеры в пиксельных координатах. Положение камеры относительно связанной системы координат ВС определяется из выражения
– положение главной точки камеры в пиксельных координатах. Положение камеры относительно связанной системы координат ВС определяется из выражения  , где I – единичная матрица.
, где I – единичная матрица.
В качестве выходной информации для формирования запроса и извлечения данных из бортовой базы данных от системы самолетовождения поступают:
– RunwayID – идентификатор ВПП;
– AerodromeID – идентификатор аэродрома.
Изобретение осуществляется следующим образом (фиг.1). В блоке A1 для ВПП, на которую выполняется посадка ВС, и которая задана с помощью идентификатора аэродрома AerodromeID и идентификатора ВПП RunwayID выполняется чтение пространственной информации о ВПП из бортовой базы данных. Результатом чтения являются:
– 2D или 3D координаты маркировки в виде списка полигонов, например, каждый полигон может представляется в виде двух элементов, набора вершин, который задается в виде матрицы координат всех вершин полигона  и списка индексов вершин треугольников;
и списка индексов вершин треугольников;
– 2D или 3D координаты положения огней ВПП, которые включают боковые, осевые, торцевые огни.
– 3D координаты торца ВПП.
В сложных метеорологических условиях при недостаточной дальности видимости, в ночное время суток или при условии, что маркировка ВПП не обнаруживается считывают координаты штатных огней ВПП, в простых метеорологических условиях если на изображениях не обнаруживаются огни ВПП считывают координаты маркировки, при необходимости считывают оба вида информации.
На следующем шаге в блоке A2 полученные пространственные данные маркировки/огней ВПП преобразуются в список опорных линий в декартовых координатах относительно точки landing runway threshold (LTP). В качестве опорных линий выступают: линии торца ВПП, боковые линии, осевые линии. Для формирования опорной линий может быть использована следующая процедура: формируется предполагаемая область расположения интересующей опорной линии, в этой области рассматриваются вершины полигонов маркировки и осуществляется поиск выпуклой оболочки вершин. После нахождения выпуклой оболочки осуществляется ее упрощение, линии длинных сторон упрощенного полигона принимаются как опорные линии.
На следующем шаге в блоке A3 осуществляется захват и формирование изображения, при этом изображение может быть монохромным или цветным от оптических сенсоров УФ, ИК, видимого диапазонов, от бортовых РЛС миллиметрового и сантиметрового диапазонов, также изображение может быть комбинированным, т.е. такое, которое получается в результате совмещения изображений от различных сенсоров. При захвате изображения фиксируют системное время захвата кадра(ов).
В предпочтительном варианте реализации способа, используют оптические и радио сенсоры высокого разрешения с углами поля зрения 20-40° по горизонтали и 15-30° по вертикали, разрешение оптических сенсоров может быть порядка 1920x1080 и выше.
Дополнительно, для повышения вероятности обнаружения ВПП на борту ВС используют сенсоры ультрафиолетового (УФ) диапазона, которые способны детектировать УФ излучение галогеновых ламп, применяемых в составе штатного светотехнического оборудования аэродромов.
На следующем шаге в блоке A4 выполняется проекция опорных линий на изображение с учетом матрицы проекции  (
( –положение камеры относительно LTP) и обнаружение линий на изображении. Для поиска линий может использовать любой подходящий алгоритм, например, RANSAC или алгоритмы на основе преобразования Хафа. При этом матрица положения камеры
–положение камеры относительно LTP) и обнаружение линий на изображении. Для поиска линий может использовать любой подходящий алгоритм, например, RANSAC или алгоритмы на основе преобразования Хафа. При этом матрица положения камеры  в нулевой момент времени определяется по данным бортовых навигационных средств, а в последующие моменты по результатам, получаемым в блоках A5 (в случае малой величины задержки на обработку изображений) или A6, если требуется компенсация задержки на время обработки изображений.
в нулевой момент времени определяется по данным бортовых навигационных средств, а в последующие моменты по результатам, получаемым в блоках A5 (в случае малой величины задержки на обработку изображений) или A6, если требуется компенсация задержки на время обработки изображений.
На следующем шаге в блоке A5 выполняется расчет текущего положения камеры  и ВС
и ВС  .
.
Расчет может выполняться следующим образом:
 ,
,

где,  – матрица группы SE(3), матрица специальной Евклидовой группы, которая определяет вращение и перемещение камеры между двумя кадрами или между бортовым навигационным решением и навигационным решением текущего кадра и вычисляемая на основе разницы между положением спроецированных опорных линий и фактическим положением линий ВПП на изображении.
– матрица группы SE(3), матрица специальной Евклидовой группы, которая определяет вращение и перемещение камеры между двумя кадрами или между бортовым навигационным решением и навигационным решением текущего кадра и вычисляемая на основе разницы между положением спроецированных опорных линий и фактическим положением линий ВПП на изображении.
На следующем шаге в блоке A6 выполняется компенсация времени, требуемого на обработку изображений. Компенсация осуществляется путем комплексирования навигационных данных, полученных на шаге A5, данных от спутниковой навигационной системы, данных от инерциальных измерительных модулей, данных от других источников, по схеме отложенной обработки с пересчетом инерциального решения от момента захвата изображения до текущего момента времени. С помощью схемы отложенной обработки синхронизируют данные от различных источников. Также в блоке A5 выполняют оценку целостности навигационного решения. Поскольку в получаемом таким образом навигационном решении учтена задержка на обработку изображений, оно может напрямую использоваться для управления движением ВС. В случае если задержка на обработку изображений невелика, то пересчет инерциального решения может не выполняться.
На следующем шаге в A8 выполняется сравнения показателей целостности полученного навигационного решения с пороговыми уровнями, в случае если целостность нарушена происходит переход в блок A7, где выставляется признак нарушения целостности. Если целостность не нарушена выполняется переход в блок A9. В блоке A9 устанавливается признак целостности навигационных данных и вычисляют параметры наведения на ВПП в виде отклонений от глиссады, выполняется передача этих отклонений в автопилот для осуществления наведения ВС. В блоке A10 выполняется проверка завершения посадки, если посадка не завершена, то шаги начиная с A3 повторяются, если завершена выполнение действий прекращается.
Последовательность действий в описании способа носит иллюстративный характер и в различных вариантах осуществления изобретения эта последовательность может отличаться от описанной при условии сохранения выполняемой функции и достигаемого результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система захода и посадки на взлётно-посадочную полосу воздушного судна с бортовой РЛС | 2019 |
|
RU2728208C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СИСТЕМА АВИАДИСПЕТЧЕРСКОГО КОНТРОЛЯ ЗА ВОЗДУШНЫМ ДВИЖЕНИЕМ В БЛИЖНЕЙ ЗОНЕ АЭРОПОРТА | 2002 |
|
RU2239846C2 |
Изобретение относится к способу автоматической посадки воздушного судна (ВС). Для автоматической посадки ВС определяют посредством бортовых навигационных средств пространственное положение воздушного судна (ВС), от оптического сенсора получают изображение взлетно-посадочной полосы (ВПП), из бортовой базы пространственных данных аэродрома получают пространственную информацию о ВПП, на которую осуществляется посадка ВС, по указанным данным выполняют формирование списка относительных координат опорных линий ВПП, c помощью радиолокационного сенсора формируют дополнительное изображение ВПП, совмещают изображения, полученные от оптического и радиолокационного сенсоров, формируя комбинированное изображение ВПП, фиксируют время захвата кадра изображения, выполняют проекцию опорных линий на комбинированное изображение ВПП с учетом калибровочных параметров оптического сенсора и текущего пространственного положения ВС по данным от бортовых навигационных средств, в окрестностях спроецированных опорных линий выполняют обнаружение линий ВПП на изображении, исходя из разницы между пиксельными координатами обнаруженных линий ВПП и положением спроецированных опорных линий рассчитывают пространственное положение воздушного судна, по полученным навигационным данным формируют параметры управления движением воздушного судна в виде отклонений от глиссады для передачи их в автопилот. 1 з.п. ф-лы, 1 ил.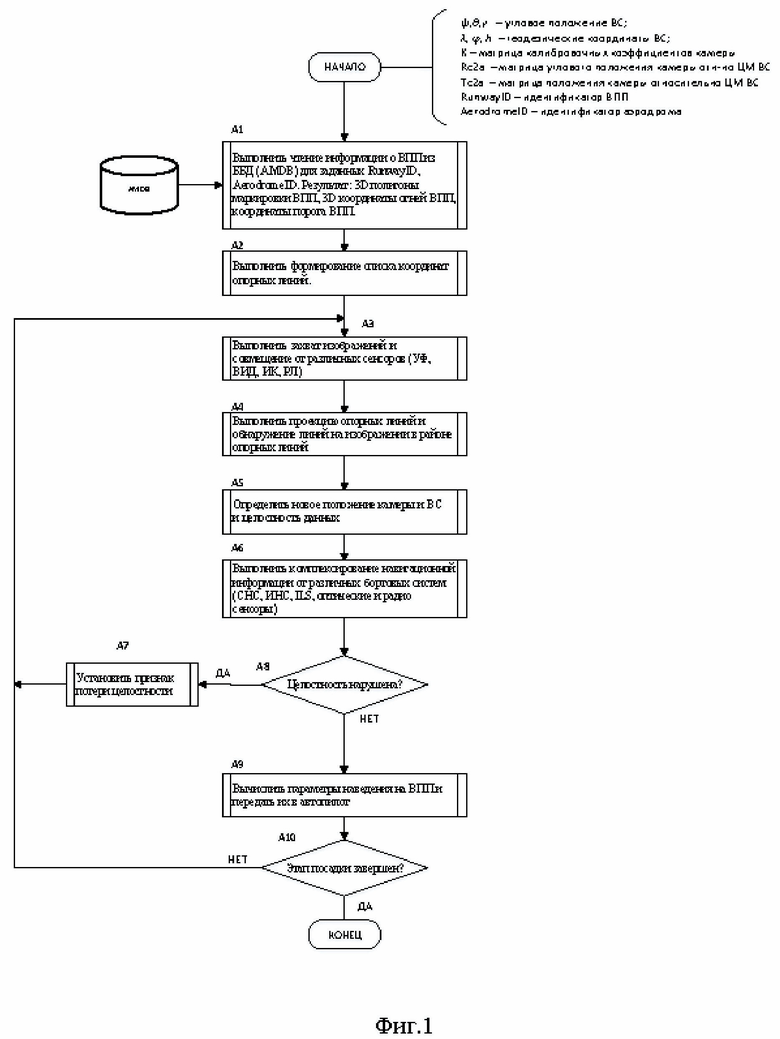
1. Способ автоматической посадки воздушного судна, при котором посредством бортовых навигационных средств определяют пространственное положение воздушного судна (ВС), от оптического сенсора получают изображение взлетно-посадочной полосы (ВПП), отличающийся тем, что из бортовой базы пространственных данных аэродрома получают пространственную информацию о ВПП, на которую осуществляется посадка ВС, по указанным данным выполняют формирование списка относительных координат опорных линий ВПП, c помощью радиолокационного сенсора формируют дополнительное изображение ВПП, совмещают изображения, полученные от оптического и радиолокационного сенсоров, формируя комбинированное изображение ВПП, фиксируют время захвата кадра изображения, выполняют проекцию опорных линий на комбинированное изображение ВПП с учетом калибровочных параметров оптического сенсора и текущего пространственного положения ВС по данным от бортовых навигационных средств, в окрестностях спроецированных опорных линий выполняют обнаружение линий ВПП на изображении, исходя из разницы между пиксельными координатами обнаруженных линий ВПП и положением спроецированных опорных линий рассчитывают пространственное положение воздушного судна, по полученным навигационным данным формируют параметры управления движением воздушного судна в виде отклонений от глиссады для передачи их в автопилот.
2. Способ автоматической посадки воздушного судна по п.1, отличающийся тем, что в случае наличия задержки на обработку изображений с целью ее компенсации проводят комплексирование навигационных данных, полученных от спутниковой навигационной системы и инерциальных измерительных модулей по схеме отложенной обработки с пересчетом инерциального решения от момента захвата изображений до текущего момента времени.
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| RU 2013122750 A, 20.11.2014 | |||
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| FR 3077393 A1, 02.08.2019 | |||
| ПОЛИХРОМАТИЧЕСКИЕ ТВЕРДОТЕЛЬНЫЕ ИСТОЧНИКИ СВЕТА ДЛЯ КОНТРОЛЯ НАСЫЩЕННОСТИ ЦВЕТА ОСВЕЩЕННЫХ ПОВЕРХНОСТЕЙ | 2011 |
|
RU2599364C2 |

