Изобретение относится к технике навигации летательных аппаратов (ЛА) различных классов и предназначено для повышения надежности и безопасности полетов в простых и сложных метеоусловиях от взлета до касания и остановки на взлетно-посадочной полосе (ВПП) при посадке, для точного вывода ЛА в створ и на направление ВПП на начальном участке захода на посадку. При этом обеспечивается коррекция курса в автоматическом режиме, визуальный полет и визуальный контроль на этапах начала снижения, планирования и выхода на посадочную прямую и завершения посадки.
Предшествующий уровень техники
Известные системы навигации GPS и Глонасс и их возможные модификации обеспечивают высокую точность вычисления 3-х мерных координат ЛА в каждый момент времени, а также их сравнение с программными значениями координат в маршрутных точках, которые вносятся в память бортовой ЭВМ или другого аналогичного устройства до вылета. Точное следование по трассе полета, вычисление отклонений от расчетного курса и коррекция курса составляют основную задачу штурманской проводки. Выполнение этой задачи с помощью систем спутниковой навигации GPS и Глонасс обеспечивает коррекцию и движение строго по курсу в любых метеоусловиях, в любое время суток, в том числе на этапах следования по эшелону, начала снижения и захода на посадку как в автоматическом, так и ручном режимах.
Но как показывает мировой опыт пилотирования, завершение этапа снижения и планирование ЛА и, в особенности, выход на посадочную прямую и завершение посадки экипаж выполняет только при наличии визуального контакта с ВПП, используя светотехнические ориентиры на полосе, с переходом при этом на визуальный полет. Ранний переход на визуальный полет, создавая резерв времени до высоты принятия решения (ВПР), а также наглядную и точную зрительную перспективу обстановки, является необходимым условием для успешного завершения полета на самом сложном и напряженном его участке. Это объясняется в первую очередь тем, что приблизительно 90% информации об окружающей обстановке дает зрительный аппарат человека, обеспечивая наглядное и максимальное достоверное отображение реальной обстановки.
Но как раз обеспечить визуальный контакт с ВПП (или с посадочной площадкой для вертолетов) системы GPS и Глонасс принципиально не могут. Это может сделать только такая бортовая система ЛА, которая работает в оптическом диапазоне светового излучения, включая ультрафиолетовый, видимый и инфракрасный диапазоны. В целом ситуация аналогична той, при которой водитель автомашины или другого подвижного средства, с помощью приборов спутниковой системы навигации приближается к цели своей поездки достаточно близко, но завершает ее исключительно по данным визуальной оценки обстановки, состояния дорог и прочее.
Известны навигационные системы для самолетов и вертолетов, патенты РФ 2019472 и 2019471 от 15.09.94 г., их европатенты 94927.125.8 и 94927.124.1 от 14.03.97 г., которые обеспечивают не только установление визуального контакта с ВПП и посадочной площадкой (ПП) по мощным импульсным светомаякам, установленных по периметру мест посадки, но и вычисление параметров движения ЛА относительно ВПП/ПП значительно ранее ВПР. Однако дальность действия этих систем зависит от погодных условий, а в сложных метеоусловиях такое ограничение является решающим.
Комплексное решение задачи по достижению максимальной безопасности и точности выполнения посадки в любых метеоусловиях может быть достигнуто, во-первых, вследствие принципиальной возможности визуализации пространственного положения ЛА относительно ВПП (ПП), обеспечения выхода в створ ВПП по направлению продолжения осевой линии в автоматическом режиме на раннем этапе снижения и значительно раньше установления визуального контакта с ВПП, во-вторых, с переходом на визуальный полет и вычислением параметров движения по сигналам указанных выше мощных импульсных светомаяков значительно раньше ВПР и завершении посадки при минимальных или нулевых отклонениях траектории посадки от расчетных значений.
Предлагаемое комплексирование технических средств систем GPS и Глонасс с техническими средствами оптического канала по указанным патентам в сочетании с современными методами и средствами обработки, вычислений и машинной графики является основой данного изобретения.
Раскрытие изобретения
Техническое решение поставленной задачи заключается в следующем.
На этапе предполетной подготовки, перед вылетом, в память блока интерфейса 33 бортовой аппаратуры комплексной навигационной системы (ОЗУ) записываются координаты 6 точек взлетно-посадочной полосы (ВПП) аэропорта назначения, это точки 10, 11, 12, 13, 14 и 15 на фиг. 2. На начальном этапе схода с эшелона, начале снижения, указанный блок интерфейса 33 (фиг.5) по сигналам многоканального приемника 32 формирует видеосигнал в виде сетки координатных линий, изменяющийся во времени фрагмент электронной карты, привязанной к текущим координатам ЛА, силуэт которого вместе с вектором путевой скорости содержится в том же видеосигнале.
Кроме того, из памяти блока интерфейса 33 на этом этапе считываются координаты указанных 6 точек ВПП, по которым блок интерфейса 33 восстанавливает электронное изображение ВПП на всем ее протяжении и ее осевой линии с продолжением (фиг. 3). Построение сетки координатных линий, положение ЛА и восстановленной ВПП в плоскости суммарного изображения происходит в единой системе координат, поэтому относительное положение указанных видеокомпонент адекватно и точно соответствует их взаимному расположению в плоскости на поверхности Земли. Одновременно блок интерфейса 33 вычисляет параметры относительного движения, в том числе отклонение курса ЛА от расчетной траектории снижения (от направления осевой линии ВПП), и выдает величины отклонений на систему автопилота. Учитывая движение ЛА, картина на фиг.3 непрерывно изменяется и, выполняя маневры и виражи, ЛА в автоматическом режиме, приближаясь, перемещается в створ и на направление осевой линии ВПП уже на начальном этапе снижения (фиг.4). Из сказанного также очевидно, что весь процесс снижения при заходе на посадку экипаж полностью контролирует визуально на экране ЖК-дисплея 37 (фиг.5). Визуализация ВПП электронными средствами относительно текущего положения ЛА на фоне сетки координатных линий, на начальной стадии снижения, практически означает переход на визуальный полет в условиях, когда оптическая видимость отсутствует. Процесс визуализации ВПП электронными средствами важен не сам по себе, а ввиду того, что при этом обеспечивается наиболее точный и намного опережающий во времени выход ЛА в створ и на направление осевой линии ВПП как в автоматическом, так и в ручном режимах.
С обнаружением импульсных светомаяков 7, фиг.1 наземного оборудования на борту ЛА значительно ранее ВПР обеспечивается визуальный контакт с ВПП 8 наряду с вычислением параметров относительного движения и формированием видеосигнала по наблюдаемым в оптическом диапазоне контуру ВПП и окружающего сюжета, и передача параметров движения ЛА на систему автоматической посадки 38, фиг.5 вплоть до момента касания на ВПП.
Таким образом, переход на оптический визуальный полет с помощью сигналов мощных импульсных световых ориентиров на ВПП замыкает эстафету вывода ЛА на расчетную траекторию и обеспечивает завершение посадки.
Электронный визуальный полет, его продолжение в оптическом канале до завершения посадки представляют собой один из основных элементов новизны по данному изобретению, в связи с чем рассмотрим его более подробно.
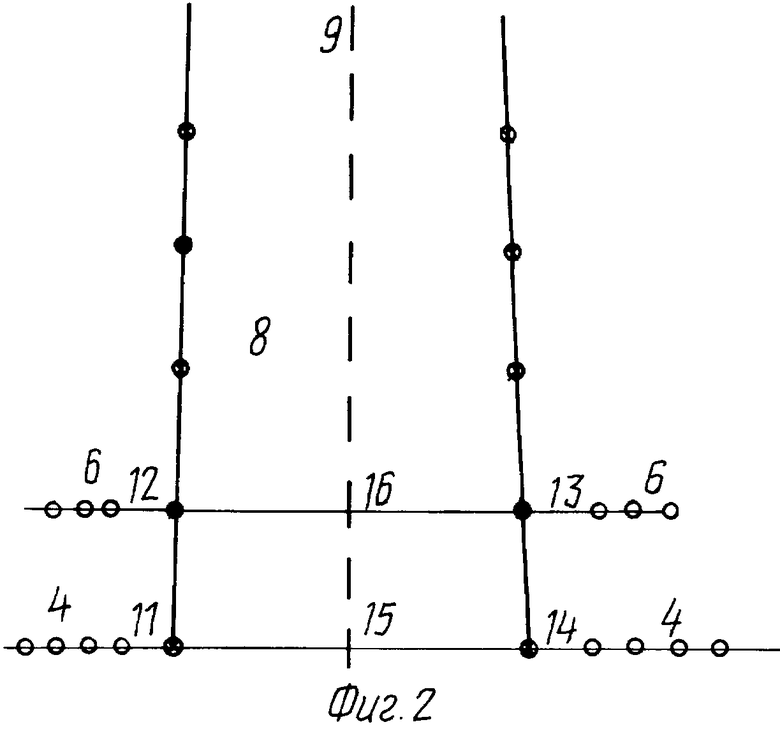
Координаты точек 11 и 14 на фиг.2 соответствуют торцу ВПП и местам расположения первой пары ИСМ 7, а точки 12 и 13 лежат на обеих сторонах ВПП и соответствуют расположению второй пары ИСМ на уровне огней приземления 6. Точки 15 и 16, фиг.2, лежат на осевой линии ВПП, на уровнях первой и второй пар соответственно, точка 16, кроме того, соответствует расчетной точке касания и для аэропортов с углом снижения траектории γгл= 3° точка 16 отстоит от торца на 450 м.
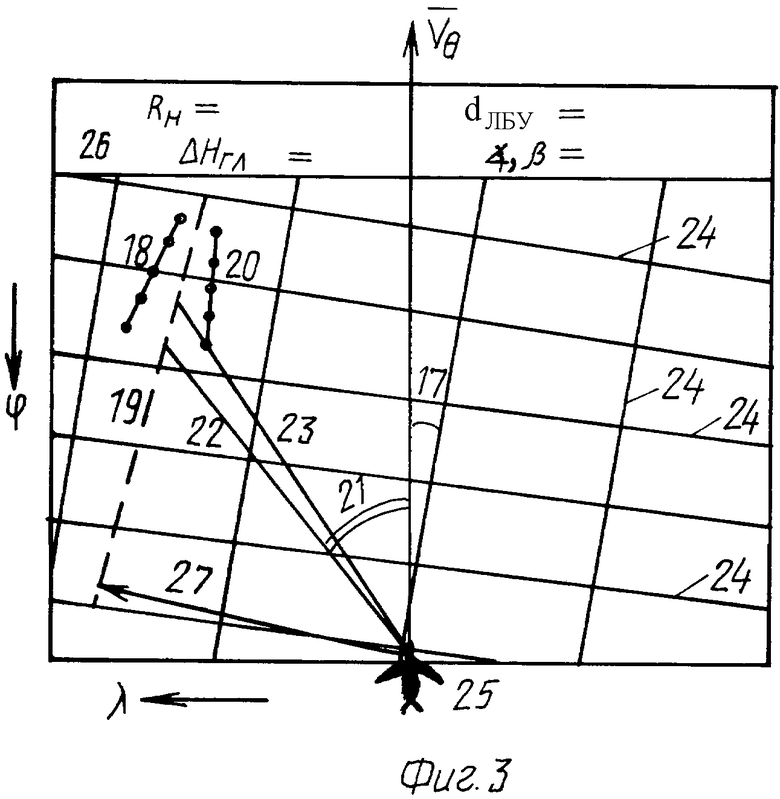
Блок интерфейса 33 навигационного комплекса по сигналам многоканального приемника GPS, Глонасс 32 (фиг.5), а также по считанным из ОЗУ сигналам формирует на начальном этапе снижения в совмещенном режиме изображение, содержащее (фиг.3):
1. Сетку координатных линий 24, фрагмент электронной карты, с угловыми и линейными обозначениями и переменным масштабом; значение широт ϕ и долгот λ на фиг. 3 являются условными, но с некоторым приближением соответствуют фрагменту эл. карты при полете из Петербурга в направлении на Москву.
2. Прямые линии 18 и 20, соответствующие обеим сторонам ВПП и осевой линии 19, построенные графическим процессором блока интерфейса 33 по считанным из памяти координатам точек 11, 12, 13, 14, 15 и 16 (указанные точки также выводятся на дисплей).
3. В середине нижней части эл. карты, в точке с текущими координатами ЛА, воспроизводится его силуэт 25, и берет начало прямая линия, соответствующая вектору путевой скорости.
Сетка электронных линий наклонена к вектору  , на угол Q 17, который непрерывно изменяется и вычисляется блоком интерфейса 33.
, на угол Q 17, который непрерывно изменяется и вычисляется блоком интерфейса 33.
4. В верхней части фиг.3 приводятся значения вычисленных на указанном этапе полета блоком интерфейса 33 параметров движения ЛА относительно ВПП 26, и, в частности, наклонная дальность RH до расчетной точки касания 16, значение угла βотв между вектором  и линией визирования на срединную точку осевой линии 15, величина линейного бокового уклонения dлбу 27, от продолжения осевой линии, а также величины отклонения ΔHгл текущей высоты ЛА от ее расчетного значения для каждого значения текущей дальности RH. Значения углов βотв и α (угол между вектором
и линией визирования на срединную точку осевой линии 15, величина линейного бокового уклонения dлбу 27, от продолжения осевой линии, а также величины отклонения ΔHгл текущей высоты ЛА от ее расчетного значения для каждого значения текущей дальности RH. Значения углов βотв и α (угол между вектором  и осевой линией, фиг.3), а также величин dлбу и ΔHгл передаются на систему автопилота для автоматической коррекции курса, раннего и точного вывода ЛА в створ ВПП и на направление осевой линии.
и осевой линией, фиг.3), а также величин dлбу и ΔHгл передаются на систему автопилота для автоматической коррекции курса, раннего и точного вывода ЛА в створ ВПП и на направление осевой линии.
Переход от электронного на действительный визуальный полет связан с обнаружением на борту ЛА ИСМ 7 - мощных световых ориентиров, работающих в темпе бегущей волны. При этом блоками оптического канала на борту ЛА по сигналам ИСМ достоверно обозначается контур ВПП на всем ее протяжении, а с точностью, соответствующей оптическому каналу обработки, вычисляются наклонная дальность до расчетной точки касания RH, величина линейного сноса Lсн, величина отклонения текущей высоты полета от расчетного значения ΔHгл при недопустимых отклонениях величин Lсн и ΔHгл формируется сигнал предупреждения. Значения Lсн и ΔHгл передаются на систему автоматической посадки.
Замена изображений этапов электронного визуального полета и оптического визуального полета, равно как и сигналов, выдаваемых на автопилот, происходит одновременно, при близком совпадении вычисленных на обоих этапах параметров движения ЛА.
Краткое описание чертежей
Фиг.1. Общая схема функционирования комплексной навигационной системы.
Фиг. 2. Схема расположения опорных точек 11, 12, 13, 14, 15, 16 на ВПП аэропорта назначения.
Фиг. 3. Изображение на экране ЖК-дисплея на начальном этапе снижения ЛА при заходе на посадку.
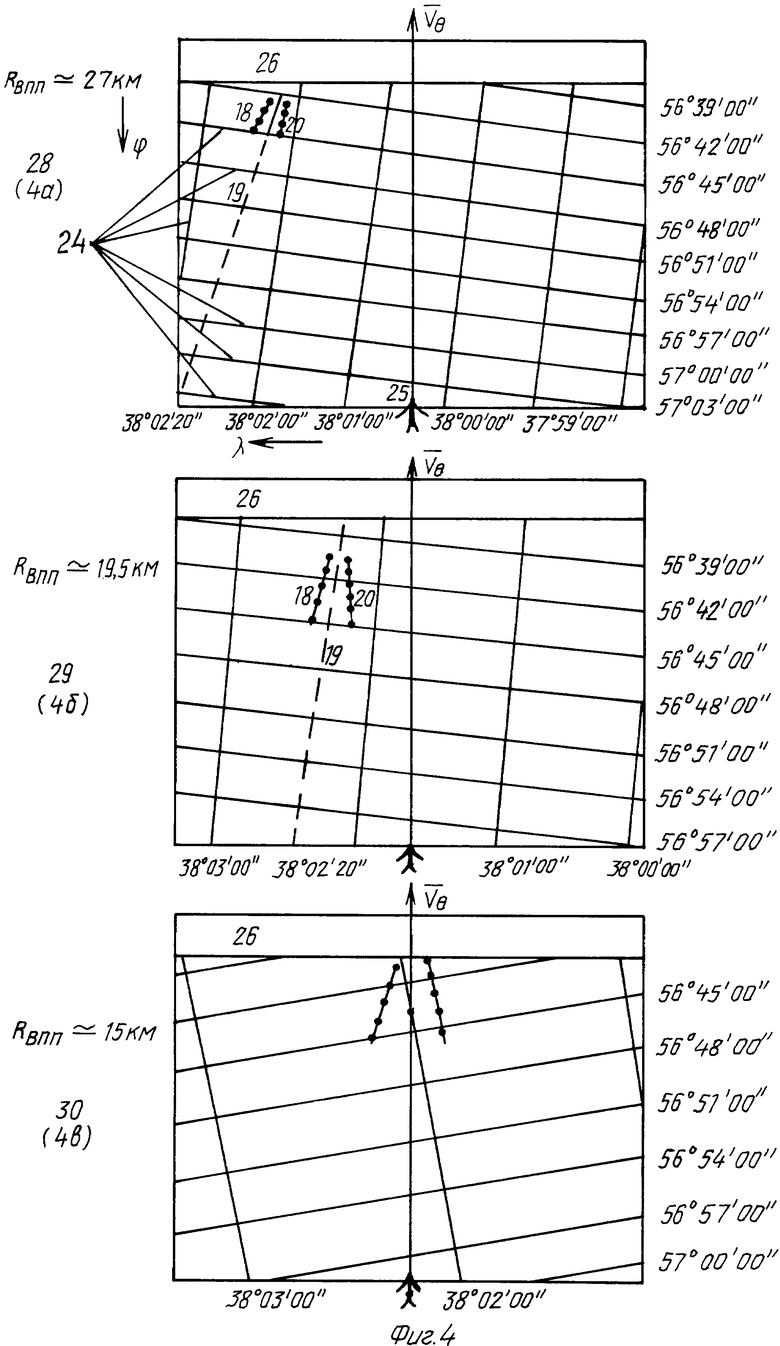
Фиг. 4. Изображение на экране ЖК-дисплея в три момента времени, иллюстрирующие динамику выхода ЛА в створ и на направление осевой линии ВПП АП назначения.
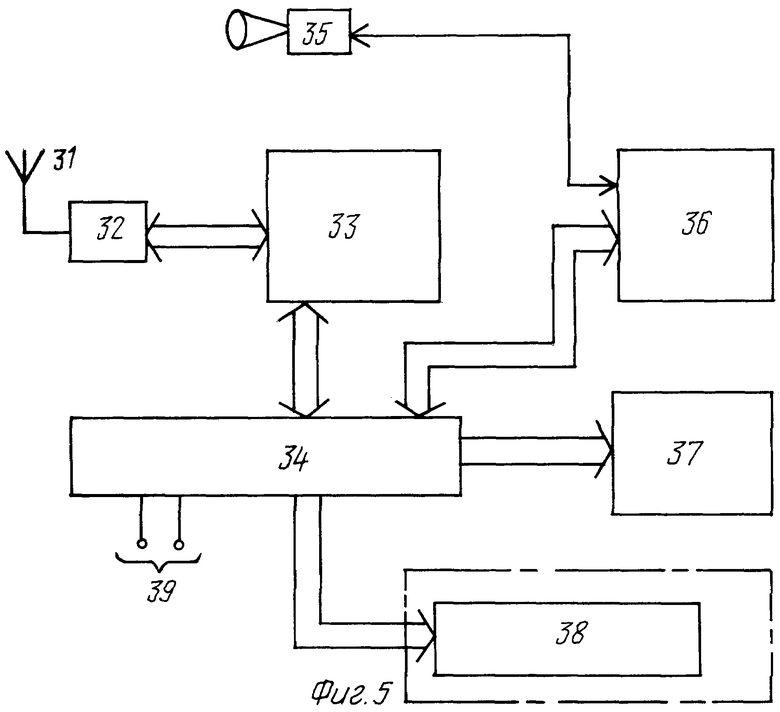
Фиг.5. Функциональная схема бортового оборудования КНС.
Общая схема функционирования комплексной навигационной системы, фиг.1, состоит из группировки спутников 1 на орбитах Земли, развернутых по схемам навигационных систем GPS и Глонасс. Бортовое оборудование ЛА2, в части, касающейся КНС, рассмотрено ниже в этом разделе.
На фиг.1 приведены все составляющие наземного оборудования КНС, это:
- огни приближения 3,
- огни светового горизонта 4,
- существующие посадочные огни 5,
- огни приземления 6,
- импульсные светомаяки 7,
- взлетно-посадочная полоса 8, (ВПП),
- осевая линия ВПП 9,
- передающая часть системы управления импульсными светомаяками 10 находится на контрольной вышке аэропорта в распоряжении авиадиспетчера.
Лучший вариант осуществления изобретения
Наземное оборудование комплексной навигационной системы (КНС) на фиг.1 состоит из существующих в аэропортах огней светотехнического оборудования, в том числе огней приближения 3, огней светового горизонта 4, посадочных огней 5, огней приземления 6 и системы их электропитания, а также дополнительно расположенных вдоль обеих сторон ВПП 8 нескольких пар импульсных светомаяков (ИСМ) большой мощности 7. ИСМ для вертолетов располагаются в вершинах равностороннего треугольника или прямоугольника с соответствующей длиной стороны. Расстояние между соседними парами ИСМ составляет 400-500 м; вторая от торца пара ИСМ располагается на линии поперек ВПП, средняя точка которой соответствует расчетной точке касания. ИСМ работают в видимом и частично в УФ и ИК диапазонах светового излучения и работают в темпе бегущей волны. Питание ИСМ встраивается в линию питания существующих огней ВПП 8, а автономное управление их работой осуществляется по командной радиолинии, передатчик и антенна которой находятся на контрольной вышке аэропорта 10, а пульт управления находится в распоряжении авиадиспетчера. Кодовые команды управления являются разовыми и обеспечивают автономное включение/выключение ИСМ 7 и организацию вспышек по методу бегущей волны в каждом из 2-х направлений.
Бортовое оборудование КНС, фиг. 5, включает антенну 31 многоканальный приемник 32, блок интерфейса 33, пульт управления 34, телевизионную камеру высокой чувствительности и разрешающей способности 35, авиакомпьютер оптического канала 36, цветного или черно-белого ЖК-дисплея 37; один из выходов пульта управления 34 подключен по входу внешней системы автопилота и автоматической посадки 38.
Антенна 31 подключена к высокочастотному входу приемника GPS-Глонасс, выход которого подключен на один вход блока интерфейса 33, на второй вход которого подключен первый выход пульта управления 34 (это соединение обеспечивает ввод координат ВВП). Первый выход блока интерфейса 33 через пульт управления подключен к входу внешней системы автопилота, второй выход блока интерфейса подключен к первому входу дисплея 37. Второй выход пульта управления 34 подключен к второму входу авиакомпьютера 36 (это соединение обеспечивает передачу потока данных электронного канала для сравнения их в авиакомпьютере с идентичными данными, параметрами оптического канала). Один выход авиакомпьютера 36 через пульт управления подключен к входу внешней системы автопилота, а второй его выход подключен к второму входу дисплея 37. На третий вход пульта 34 подключено напряжение борт-сети 39, транслируемое на все блоки-потребители.
Назначение приемника 32 (и антенны 31) заключается в приеме, обработке информации и вычислении навигационных параметров по сигналам от группировки n-спутников, развернутых по системам GPS и Глонасс 1. Вычисление координат в маршрутных точках, отклонений от их расчетных значений, а также служебной информации осуществляется в принятой для штурманской проводки единой системе координат, это может быть геоцентрическая система координат XYZ, система координат WGS-84 и др. Вычисленные текущие координаты с выхода приемника 32 подключены на первый вход блока интерфейса 33, назначение которого заключается в выполнении следующих основных функций:
1. На этапе движения по эшелону формирование файлов навигационной и служебной информации, при этом кодовые сигналы величин отклонений текущего курса от расчетного подаются через пульт управления 34 на внешнюю систему автопилота 38, а файлы навигационной информации в формате телевизионных сигналов и в структуре RGB через пульт управления 34 подключены ко входу ЖК-дисплея 37.
2. На начальном этапе снижения при заходе на посадку:
- формирует сетку координатных линий, фрагмент электронной карты, которые привязаны к текущим координатам ЛА, при этом наклон координатных линий соответствует ориентации курса ЛА относительно этих линий, а масштаб электронной карты изменяется в функции расстояния до ВПП;
- производит графическое построение контура и осевой линии ВПП по считанным из памяти координатам ВПП и осевой линии;
- производит вычисление углов θ 17 и угла β 21 (фиг.3) величины линейного бокового уклонения dлбу 27, а также наклонной дальности 23 и величины ΔHгл - отклонений текущей высоты ЛА относительно расчетной;
- построение вектора путевой скорости 
- формирование совмещенного сигнала в структуре RGB, содержащего указанную сетку координатных линий с угловыми и линейными величинами координат, прямую вектора  (фиг.3), силуэт ЛА, как показано на фиг. 3, восстановленные контур и осевую линию ВПП с ее продолжением, а также значение величин RН (23), dЛБУ (27), ΔHгл и угла βотв (21).
(фиг.3), силуэт ЛА, как показано на фиг. 3, восстановленные контур и осевую линию ВПП с ее продолжением, а также значение величин RН (23), dЛБУ (27), ΔHгл и угла βотв (21).
ТВ камера 35 предназначена для формирования ТВ сигнала, содержащего сюжет в поле зрения камеры, и, в частности, ВПП с импульсными светомаяками и другими огнями светотехнического оборудования. Особенностью камеры 35 являются высокая чувствительность и разрешающая способность, адаптация к сложному подстилающему фону, те качественные характеристики, которые обеспечивают обнаружение ИСМ и других огней на максимально возможной дальности.
Специализированный авиакомпьютер 36 предназначен для обработки сигналов телекамеры 35, выполнения процедур обнаружения сигналов точечной формы по специальным алгоритмам и вычисления параметров движения ЛА относительно ВПП на этапе обнаружения как ИСМ 7, так и других огней аэропорта назначения. Спец-авиакомпьютер 36 формирует на выходе стандартный ТВ сигнал в реальном масштабе времени и в структуре RGB, который содержит сюжет в поле зрения камеры и вычисленные параметры движения ЛА; в случае недопустимых отклонений курса ЛА формируется сигнал предупреждения. ЖК-дисплей 37, черно-белый или цветной, предназначен для визуализации оперативной и навигационной информации на всех этапах полета, от взлета до касания и остановки на ВПП при посадке.
Пульт управления 34 предназначен для выполнения следующих функций:
1. Включение/выключение боотового оборудования; выбор режимов работы бортового комплекса, в том числе "Взлет"-"Посадка", "Класс аэропорта", "Самолет"-"Вертолет".
2. На этапе предполетной подготовки ввода в память блока интерфейса 33 координат 6 точек ВПП.
3. Вывода (трансляции) на ЖК-дисплей ТВ сигналов в структуре RGB на этапах движения по эшелону, начала снижения, выхода на посадочную прямую и завершения посадки.
4. Вывода (трансляции) на вход систем автопилота и автоматической посадки кодовых сигналов коррекции курса на этапах движения по эшелону, начала снижения и выхода на посадочную прямую.
Рассмотрим, как работает КНС на различных этапах полета
Предполетная подготовка
В этом и других разделах рассматриваются только присущие КНС особенности работы, оставляя в стороне рутинные операции. В оперативную память (ОЗУ) блока интерфейса 33 вводятся известные координаты 6 точек ВПП (фиг.2), перечисленные в ту систему координат, по которой вычисляются координаты при выполнении полета. При этом с учетом требований наставления по производству полетов (НВП) в ОЗУ вносятся также координаты аналогичных точек запасных аэродромов. Запись может быть выполнена, например, с помощью клавишного преднабора пульта управления 34 и вставляемой в принимающее устройство 40 микродискеты или флэш-карты, что обеспечивает выбор аэропорта назначения и возможность перепрограммирования направления полета ЛА.
Взлет
В любых погодных условиях на этапе разбега на взлете и до момента отрыва используются в основном блоки 34, 35, 36, дисплей 37 и ИСМ наземного оборудования, формирующие бегущую световую волну в направлении взлета. При этом вычисляются и выводятся на дисплей 37 изображение набегающей ВПП, а также дальность RТ до дальнего торца ВПП, отклонение ΔX направления разбега от осевой линии, а также сигнал предупреждения в виде мигающего светового пятна красного цвета при недопустимых отклонениях.
Таким образом, в каждый момент времени на разбеге экипаж имеет точную оперативную информацию о штатном режиме работы или отклонениях от него. После отрыва бортовое оборудование КНС используется в режиме движения по эшелону.
Движение по эшелону
На этом этапе файлы навигационной информации, содержащей данные по текущим координатам ЛА, отклонениям курса ЛА от расчетного, дальность, остающееся время полета и другие данные с выхода приемоиндикатора GPS-Глонасс 31 подаются на блок интерфейса 33, в котором трансформируются в ТВ формат в структуре RGB и через пульт 34 выводятся на дисплей 37. В случае изменений условий в аэропорту назначения курс ЛА может быть перепрограммирован экипажем, при этом собственно в том, что касается бортовой КНС, с пульта управления 34 вводятся координаты точек ВПП одного из запасных аэродромов, выбранных для посадки.
Этап снижения
Начало схода с эшелона зависит от расстояния между аэропортами вылета и назначения. Для КНС это расстояние может быть выбрано равным 25-30 км, но в принципе может быть значительно больше. Дело в том, что вычисление углов, а также величин dЛБУ на фиг.3 выполняются на поверхности Земли, которую на указанных расстояниях можно считать плоской, т.е. не учитывать кривизну. Это, с одной стороны, упрощает расчеты, а с другой - дальность порядка 25-30 км для выполнения маневров и раннего выхода в створ ВПП/ПП является вполне достаточной.
При достижении RВПП=25-30 км (RВПП вычисляется в приемоиндикаторе GPS 32 и передается на блок интерфейса 33) блок интерфейса начинает формировать фрагмент электронной карты, сетку координатных линий, привязанную к текущим координатам ЛА. Угловые и линейные обозначения координатных линий проставлены так, как показано на фиг.4 а, б, в. В середине нижней части электронной карты обозначен силуэт ЛА и протянутый от него вектор путевой скорости. Координаты ЛА и угол наклона к координатным линиям непрерывно изменяются и, обновляясь, последовательно приближаются к координатам ВПП на фиг.4 а, б, в. Прямые 18, 19 и 20 построены методом машинной графики по точкам 11, 12, 13, 14, 15 и 16 ВПП, координаты которых считываются в блоке интерфейса 33 с момента перехода к начальному этапу снижения ЛА (достижения RВПП=25-30 км).
Количество координатных линий ϕ и λ в плоскости фиг.4 определяет масштаб электронной карты, который по мере приближения к ВПП расширяется с уменьшением числа обеих координатных линий (фиг.4в). Совмещенное изображение на фиг. 4 а, б, в позволяет экипажу не только визуально контролировать весь процесс выхода ЛА в створ и на направление осевой линии ВПП, но и получать непосредственные количественные оценки дальности до ВПП, величины dЛБУ линейного бокового уклонения и угловых отклонений βотв и α. Вместе с тем, выход в створ ВПП выполняется в автоматическом режиме, при этом значения необходимых корректирующих сигналов, вычисляемых блоком интерфейса 33, задаются через пульт управления 34 на систему автопилота (автоматической посадки), значения которых представлены в верхней части совмещенного изображения на фиг.3 и 4.
Вычисление параметров относительного движения ЛА и величин отклонений, пропорциональных сигналам коррекции курса, может быть выполнено следующим образом.
Вычисление наклонной дальности до расчетной точки касания Rнакл (этап начала снижения).
Метод вычисления Rнакл основан на измерении расстояния между двумя точками пространства с известными координатами, по формуле сферической геометрии:
где X1Y1Z1 - текущие координаты ЛА, вычисляются приемоиндикатором 32,
X2Y2Z2 - координаты точки 16 на фиг.2, считываемые из памяти блока интерфейса 33,
Вычисление угла βотв (фиг.3)
Основано на вычислении угла между двумя прямыми линиями в плоскости Земли, между прямой линией, соответствующей вектору  , и вспомогательной линией 22 на фиг.3; линия 22 представляет собой линию визирования в плоскости Земли между проекцией точки текущего положения ЛА и точкой 15 на фиг.2 (точка 15 на осевой линии ВПП на уровне 1 пары ИСМ).
, и вспомогательной линией 22 на фиг.3; линия 22 представляет собой линию визирования в плоскости Земли между проекцией точки текущего положения ЛА и точкой 15 на фиг.2 (точка 15 на осевой линии ВПП на уровне 1 пары ИСМ).
Уравнение прямой вектора  получим по ХУ координатам ЛА в 2-х точках, разделенных интервалом времени ΔT, равным нескольким секундам; уравнение вспомогательной прямой 22 будет А2х+В2у+С2=0.
получим по ХУ координатам ЛА в 2-х точках, разделенных интервалом времени ΔT, равным нескольким секундам; уравнение вспомогательной прямой 22 будет А2х+В2у+С2=0.
Тогда угол βотв 21 между обеими прямыми будет определен из формулы:
Аналогично вычисляются углы между вектором  и осевой линией ВПП, угол α (фиг.4) и угол θ 17 наклона вектора
и осевой линией ВПП, угол α (фиг.4) и угол θ 17 наклона вектора  к координатной оси ϕ на фиг.3.
к координатной оси ϕ на фиг.3.
Вычисление линейного бокового уклонения
Значение dлбу вычисляется как расстояние в плоскости Земли между точкой текущего положения проекции ЛА с координатами Хi Yi и продолжением осевой линии 19 A3x+B3у+С3=0, построение этой прямой строится по координатам точек 15 и 16 на фиг.2, считываемым из памяти в блоке интерфейса 33 на начальном и указанном выше этапе снижения.
По известной формуле аналитической геометрии расстояние dлбу от точки с координатами Хi Yi до прямой A3 x+В3 у+С3=0
Вычисление ΔHгл
Вычисление значений отклонения текущей высоты Нтек ЛА (по данным приемоиндикатора 32 или другого измерителя высоты) от расчетного Нр значения может быть выполнено следующим образом. Значение Нтек вычисляет ПИ 32 как координату Z, пересчитываемую по известным алгоритмам в текущее значение высоты полета Нтек, а расчетное значение высоты Нр в блоке интерфейса 33 может быть вычислено как
Hp = Rн•Sinγгл,
где γгл - расчетное и заранее известное значение угла снижения траектории для данного аэропорта назначения (вводится на этапе предполетной подготовки при выборе класса аэропорта);
обычно значение γгл = 2,7-3,0°.
Каждому значению дальности Rнакл до точки касания соответствует расчетное значение высоты полета НТ, если погрешность вычисления Rнакл равно или менее 100 м, то вычисленная погрешность вычисления ΔHгл лежит в пределах σΔHгл ≤ 10-15м (вызывается погрешностью вычислений Rнакл), что на начальном этапе захода на посадку следует считать приемлемым; в дифференциальном режиме измерений σΔHгл ≤ 1м.
Значения параметров βотв, α, dлбу и ΔHгл двоичными кодами подаются на вход внешней системы автопилота 37 для коррекции курса и компенсации ошибок в вертикальной и горизонтальной плоскостях, что обеспечит точный и ранний выход ЛА в створ ВПП и на посадочную прямую.
Выход на посадочную прямую, завершение посадки.
Ранний выход в створ ВПП, выполненный на предыдущем этапе, фактически равносилен выводу ЛА на посадочную прямую с погрешностями, определяемыми лишь ошибками вычисления текущих координат ЛА приемоиндикатором 32, которые в дифференциальном режиме работы лежат н пределах нескольких метров. Следующий шаг - обнаружение световых ориентиров ВПП значительно ранее высоты принятия решения (ВПР) и переход на оптический визуальный полет - обеспечивает оптический канал КНС, это мощные импульсные светомаяки, работающие в темпе бегущей волны в наземном оборудовании (в варианте КНС для вертолетов - это 3 или 4 светомаяка, вспышки которых происходят одновременно), ТВ камера и авиакомпьютер в бортовом. Здесь обработка потоков информации в реальном времени и вычисление параметров движения выполняются на современном уровне, с использованием методов и технических средств обнаружения сигналов от точечных источников, быстрых алгоритмов и быстродействующих процессоров. Обнаружение первых двух пар ИСМ, ближайших к ЛА (точки 11, 12, 13, 14 на фиг.2), позволяет вычислить все основные параметры движения, в том числе наклонную дальность до расчетной точки касания Rнакл, величину линейного бокового уклонения dЛБУ (или lCH), высоту полета Нп и значение ΔHгл - отклонение по высоте от расчетной глиссады, угла сноса lCH. Надо подчеркнуть, что в этом режиме работы вычисления указанных параметров ведутся по непосредственно наблюдаемым световым ориентирам ВПП. Высокая точность, соответствующая использованию оптического канала, обеспечивает минимальные или нулевые отклонения от расчетных значений при пролете торца ВПП, и, следовательно, завершение посадки с минимальными отклонениями от расчетной траектории. В вертолетном варианте КНС вычисляются наклонная дальность до центра ПП, угол отворота βотв и ΔHгл - отклонения по высоте от расчетной глиссады.
Вывод на дисплей 37 изображения ВПП (и окружающего сюжета) и параметров движения, а также замена суммарного изображения предыдущего режима выполняются, во-первых, при близком совпадении значений отклонений курса в горизонтальной и вертикальной плоскостях, а, во-вторых, временное расположение изображений ВПП, восстановленного электронными средствами и непосредственно наблюдаемого, должны быть близки настолько, чтобы их замена была практически незаметной. Механизм такой замены широко применяется в телевизионной технике при микшировании ТВ сигналов двух независимых источников. При этом замена одного изображения другим происходит одновременно с заменой сигналов коррекции курса, подаваемых на внешнюю систему автоматической посадки 38.
Построение КНС, обеспечивая в любых погодных условиях наиболее точное следование по расчетной траектории в сочетании с максимальной информированностью экипажа на самом сложном напряженном и опасном этапе полета, допускает дополнительные варианты ее использования.
Так, в случае отказа бортовой системы питания посадка может быть выполнена экипажем визуально, по мощным импульсным светомаякам наземного оборудования, которые видны экипажу значительно ранее высоты принятия решения при любых погодных условиях. Отказ борт-сети ЛА при заходе на посадку может быть парирован подключением на сетевые клеммы пульта управления источника аварийного питания, например, аккумулятора небольшой емкости из аварийного комплекта ЛА.
Наличие в аэропортах огней приближения 3, работающих в своем темпе бегущей волны и импульсных светомаяков, КНС делает возможным организацию единой, общей бегущей волны - от начального расположения огней приближения до дальнего торца ВПП, в синхронном режиме. Точная световая ориентация направления посадки увеличивает не только зрительную перспективу, но и уверенность экипажа в правильности принимаемых решений. Для достижения синхронизма и организации общей бегущей волны на внешний вход пульта системы управления импульсными светомаяками 10, фиг.1, необходимо подключить два провода от устройства питания и управления работой огней приближения. Передаваемый сигнал, как разрешающая команда, предопределяет как включение, так и работу всех ИСМ сразу вслед за последним огнем приближения, который расположен вблизи торца ВПП. Это и обеспечит непрерывную бегущую волну, в одном темпе.
Ввод и установка в аэропортах импульсных светомаяков и системы управления связаны с соответствующими расходами, что может быть обременительным для некоторых аэропортов, например с невысокой интенсивностью движения. В этом случае, но только в простых погодных условиях, бортовые блоки оптического канала обеспечат визуальный контакт и вычисление параметров движения ЛА по существующим огням светового горизонта 4 и глиссадным огням приземления 6, располагаемых к тому же на местах установки первой и второй пар ИСМ (и соответственно с теми же координатами) при сохранении возможности электронного визуального полета на начальном этапе снижения.
Промышленная применимость
Изобретение может быть использовано для навигации пилотируемых и беспилотных ЛА любых классов, автоматического управления полетом и коррекции курса на всех этапах полета, при выполнении поисково-спасательных операций и посадки вертолетов на посадочные площадки малых размеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ РУЛЕНИЯ, ВЗЛЕТА И ПОСАДКИ САМОЛЕТОВ В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ | 1992 |
|
RU2019472C1 |
| СИСТЕМА АВИАДИСПЕТЧЕРСКОГО КОНТРОЛЯ ЗА ВОЗДУШНЫМ ДВИЖЕНИЕМ В БЛИЖНЕЙ ЗОНЕ АЭРОПОРТА | 2002 |
|
RU2239846C2 |
| КОМПЛЕКСНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ ПОИСКА ПОТЕРПЕВШИХ БЕДСТВИЕ ЛЮДЕЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2087386C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ ПОСАДКИ ВЕРТОЛЕТОВ В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ | 1992 |
|
RU2019471C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| Способ автоматической посадки воздушного судна | 2023 |
|
RU2839178C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2006 |
|
RU2341774C2 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
Изобретение относится к области навигации летательных аппаратов (ЛА) преимущественно при полетах в сложных метеоусловиях. Предлагаемая система включает в себя навигационные спутники GPS и Глонасс и связанное с ними бортовое оборудование ЛА. Последнее содержит многоканальный приемник спутниковых данных, блок интерфейса, ТВ-камеру, авиакомпьютер и дисплей. Данное оборудование обеспечивает автоматические расчет и коррекцию курса ЛА и удобную визуализацию полетной информации. Система содержит также наземное светотехническое оборудование, в том числе несколько пар импульсных маяков. Маяки работают в видимом, ИК- и УФ-спектральных диапазонах и снабжены автономной системой управления. В ее варианте система содержит средства синхронизации импульсных маяков с огнями приближения, так, что образуется единая бегущая световая волна, облегчающая осуществление посадки ЛА. Изобретение направлено на обеспечение высокой надежности и безопасности всех этапов и режимов полета. 2 с. и 1 з.п. ф-лы, 5 ил.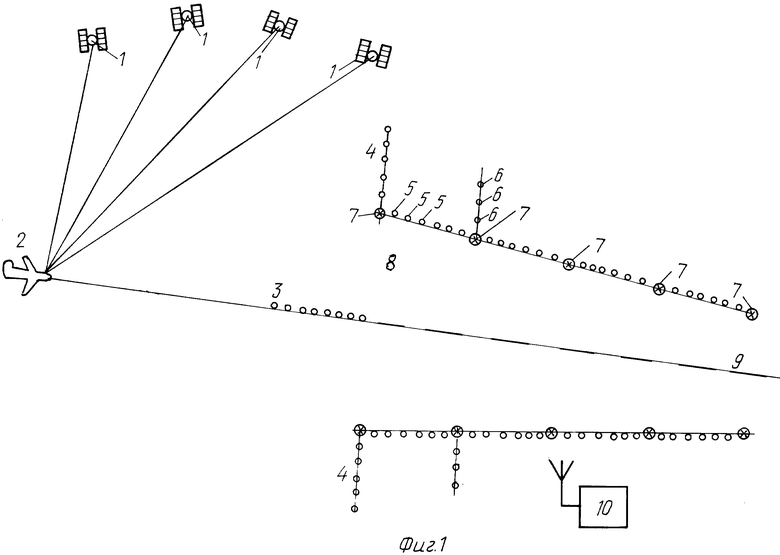
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ РУЛЕНИЯ, ВЗЛЕТА И ПОСАДКИ САМОЛЕТОВ В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ | 1992 |
|
RU2019472C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ОБРАТНОЙ СВЯЗИ, ТЕРМИНАЛЬНОЕ УСТРОЙСТВО И СЕТЕВОЕ УСТРОЙСТВО | 2017 |
|
RU2744800C1 |
| US 5841370 А, 24.11.1998 | |||
| US 5745863 А, 28.04.1998 | |||
| US 5136288 А, 04.08.1992. | |||

