Предшествующий уровень техники.
Существующие системы для управления воздушным движением и наблюдения за воздушной обстановкой в основном основаны на радиолокационных средствах обнаружения и сопровождения воздушных судов (ВС), вычисления координат и преобразования радиолокационных изображений в изображения телевизионного формата. При этом на экран диспетчерского монитора выводятся принятые для данного аэропорта коридоры возможного движения ВС при снижении и заходе на посадку, ориентированные относительно взлетно-посадочных полос (ВПП) аэропорта, координаты ВС, вычисленные радиолокационными средствами, а также силуэт ВС или подвижные точки, его отображающие. Указанные средства обеспечивают надежное сопровождение и визуальный контроль за движением ВС на удалении 100 и более километров от аэропорта и до момента касания. Помимо указанных средств посадочные комплексы аэропортов включают также курсоглиссадные маяки, по принятым на борту сигналам которых экипажи ВС определяют правильность движения в направлении на заданную ВПП и величины отклонений по курсу и высоте полета. Кроме того, в распоряжении авиадиспетчеров имеются дублированные речевые каналы связи.
Авиадиспетчерский комплекс в составе обзорных и измерительных радаров, аппаратуры преобразования радиолокационных изображений в телевизионные, а также мониторов для визуального контроля и речевых каналов связи с экипажами ВС принимается за прототип к настоящему изобретению.
Одной из тенденций современной цивилизации является возрастающий объем авиатранспортных перевозок, что требует, с одной стороны, модификации и расширения технических возможностей существующих бортовых и наземных средств, а с другой стороны, требует разработок и внедрения соответствующих комплексов аппаратуры на основе последних достижений в области авиационных технологий.
Несмотря на значительные усилия в части внедрения новых технологических решений как собственно в авиационную технику, так и в системы управления воздушным движением, уровень авиапроисшествий во всем мире продолжает ежегодно возрастать. При этом значительная часть (до 40%) всех авиапроисшествий приходится на самую опасную и напряженную фазу полета - снижение и заход на посадку. В этой обстановке резко возрастают и психофизиологические нагрузки на авиадиспетчеров, в немалой степени ответственных за принятие согласованных с экипажами ВС решений.
Следует предположить, что дооснащение действующих авиадиспетчерских комплексов компактными электронными средствами, которые в дополнение к существующим обеспечат более высокую точность контроля за выводом ВС на расчетную траекторию снижения и посадки, максимальную информированность авиадиспетчеров и автоматизацию каждого диспетчерского поста при одновременном снижении нагрузки на диспетчеров является одним из альтернативных решений.
Повышение точности средств диспетчерского контроля за выводом ВС на расчетную траекторию может быть выполнено следующим образом:
- во-первых, это может быть сделано путем повышения точности вычисления координат и пилотажно-навигационных параметров движения ВС по сигналам спутниковых навигационных систем GPS и Глонасс и технических средств для их обработки на борту ВС. Для этого вычисленные на борту координаты ВС необходимо передать на контрольно-диспетчерский пункт (КДП) аэропорта. В настоящее время достигнутая точность вычислений этих координат лежит в пределах нескольких метров, а в дифференциальном режиме работы бортового навигационного комплекса - в субметровом диапазоне;
- во-вторых, путем введения на экраны диспетчерских мониторов коридоров-туннелей допустимого движения ВС при заходе на посадку, размеры которых определяют максимально допустимые отклонения по курсу и высоте полета, что обеспечит точный вывод ВС на посадочную прямую и посадку с первого захода.
Ввод туннельной концепции для управления воздушным движением рекомендован международной организацией гражданской авиации ИКАО как самое современное и предельно точное и наглядное средство контроля и управления воздушным движением (см. журнал “Avionics”, август 1993 г.).
Оба указанных условия неотделимы: нет смысла применять туннельную концепцию, если одновременно не обеспечена требуемая точность определения местоположения ВС, то есть точность вычисления координат.
Данное изобретение направлено на повышение надежности, безопасности и точности контролируемого вывода ВС на посадочную прямую в любых метеоусловиях в качестве дополнительного информационного канала к существующим средствам.
Раскрытие изобретения.
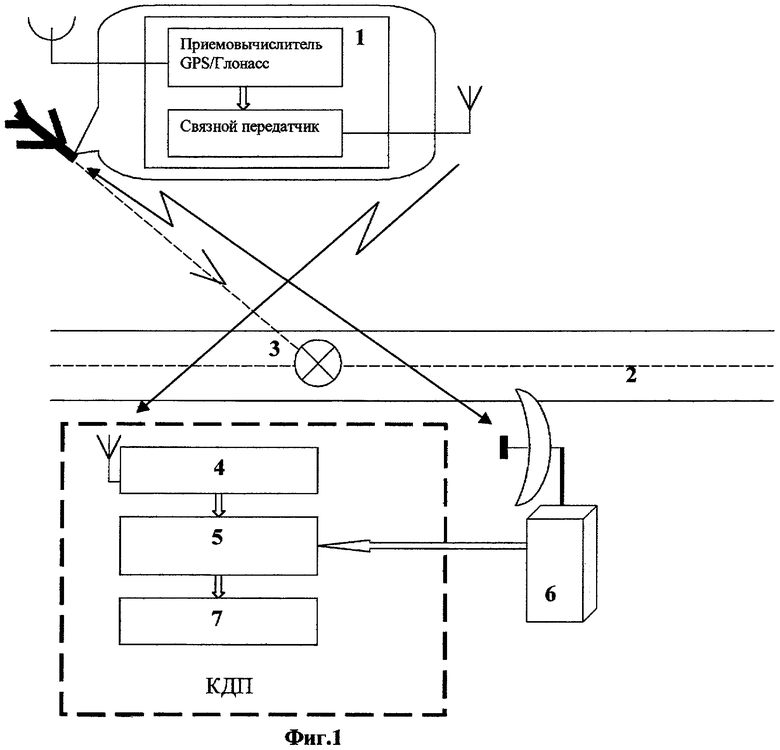
Принцип действия и техническое решение по данному изобретению объясняются следующим образом. На Фиг. 1 приведена общая схема функционирования предлагаемой системы авиадиспетчерского контроля, в которую входят несколько блоков бортового оборудования ВС и наземный комплекс.
Бортовое оборудование 1 состоит из антенны и приемовычислителя координат ВС по сигналам навигационных спутников, антенны и радиопередатчика для передачи кодовых посылок координат на диспетчерский пункт КПД. Общий объем передаваемой информации включает указанные кодовые посылки, бортовой номер ВС и некоторый объем сервисной информации, например расчетное время прибытия, дальность до ближайших запасных аэропортов и другое, в сумме составляет значительно менее S<1 Кбайт/сек, поэтому эта информация без затруднений может быть передана либо по отдельному узкополосному каналу связи, либо по одному из существующих каналов связи по методу мультиплексирования, например на поднесущей частоте.
На Фиг. 1 движение воздушного судна направлено в расчетную точку касания 3 взлетно-посадочной полосы 2.
Наземная часть авиадиспетчерского комплекса состоит из антенны и приемника для приема и обработки кодовой информации 4, блока преобразования данных 5, радиолокационной станции (РЛС) аэропорта 6 и персонального компьютера - электронно-вычислительной машины (ПЭВМ) 7.
Выход приемника 4 подключен к одному из входов блока преобразования данных 5, на другой вход которого подключен выход РЛС 6, а выход блока преобразования данных 5 по последовательному интерфейсу подключен на вход ПЭВМ 7. ПЭВМ 7 представляет собой одну из модификаций современных персональных компьютеров, например, типа Pentium II или Pentium III.
Приемовычислитель бортового оборудования выполняет вычисление координат ВС по сигналам, принятым от группировки спутников GPS-Глонасс в той системе координат, в которой осуществляется штурманская проводка ВС в полете. По одному из каналов связи передатчик передает эти данные на КПД. Выход приемника 4 подключен на один из входов блока преобразования данных 5, который выполняет преобразование принятых кодовых посылок для их передачи по последовательному интерфейсу на вход ПЭВМ 7.
Приемовычислитель построен аналогично современным навигационным приборам, широко используемым для вычисления собственных координат пользователя. В таких приборах по принятым от группировки спутников сигналам - минимум от четырех из них - вычислитель фиксирует время прохождения сигналов от каждого спутника до пользователя (при этом обеспечивается общая единая шкала времени). При известной скорости распространения радиоволн измеряется дальность между - в нашем случае - воздушным судном и каждым из спутников. Решая систему уравнений, основанных на формулах сферической геометрии, вычислитель вычисляет координаты воздушного судна в принятой системе координат, например геоцентрической, WGS-84 или других. Вычисленные текущие координаты воздушного судна, ежесекундно обновляемые по радиолинии, связывающей воздушное судно с диспетчерским постом, передаются на последний. Антенна и приемник текущих координат принимают указанные сигналы и передают их в пределах диспетчерского зала на вход блока преобразования данных.
Более подробно о работе глобальных навигационных систем можно узнать в книге: Сетевые спутниковые радионавигационные системы. М.: Издательство “Радио и связь”, 1993 г. (См., например, главы 2, 7, 11, 12 и др.).
Как приемовычислитель, так и требуемый канал связи (например, радиопередатчик) могут по разным причинам отсутствовать на борту ВС, поэтому вариант передачи координат с борта ВС будет не реализован. Но обзорные или измерительные РЛС 6 имеются в каждом аэропорту. В этом варианте вычисленные РЛС 6 координаты ВС подаются на другой вход блока преобразования 5, который выполняет обработку одного из 2 потоков данных в соответствии с критерием:
- если на одном входе имеются сигналы с выхода приемника 4, то преобразованию и передаче на ПЭВМ 7 подвергается этот сигнал,
- если от приемника 4 сигнал отсутствует, то преобразованию и передаче на ПЭВМ 7 подвергается сигнал от РЛС.
Оба входных потока информации на выходе блока преобразования 5 приводятся к одному виду и по последовательному интерфейсу передаются на ПЭВМ 7.
В соответствии с изложенным программным обеспечением, а также введенными в память компьютера координатах ВПП и ее осевой линии ПЭВМ 7 осуществляют вычисление пилотажно-навигационных параметров ВС, таких как дальность наклонную Rнакл, дальность горизонтальную Rгор, высоту полета Нп, величину линейного бокового уклонения dлбу, а также отклонение двух последних величин от их расчетных значений, то есть ΔНп, Δdлбу. Кроме того, ПЭВМ 7 в формате телевизионных сигналов формирует графические изображения, представленные на Фиг.2 и 3 для их отображения на мониторе ПЭВМ.
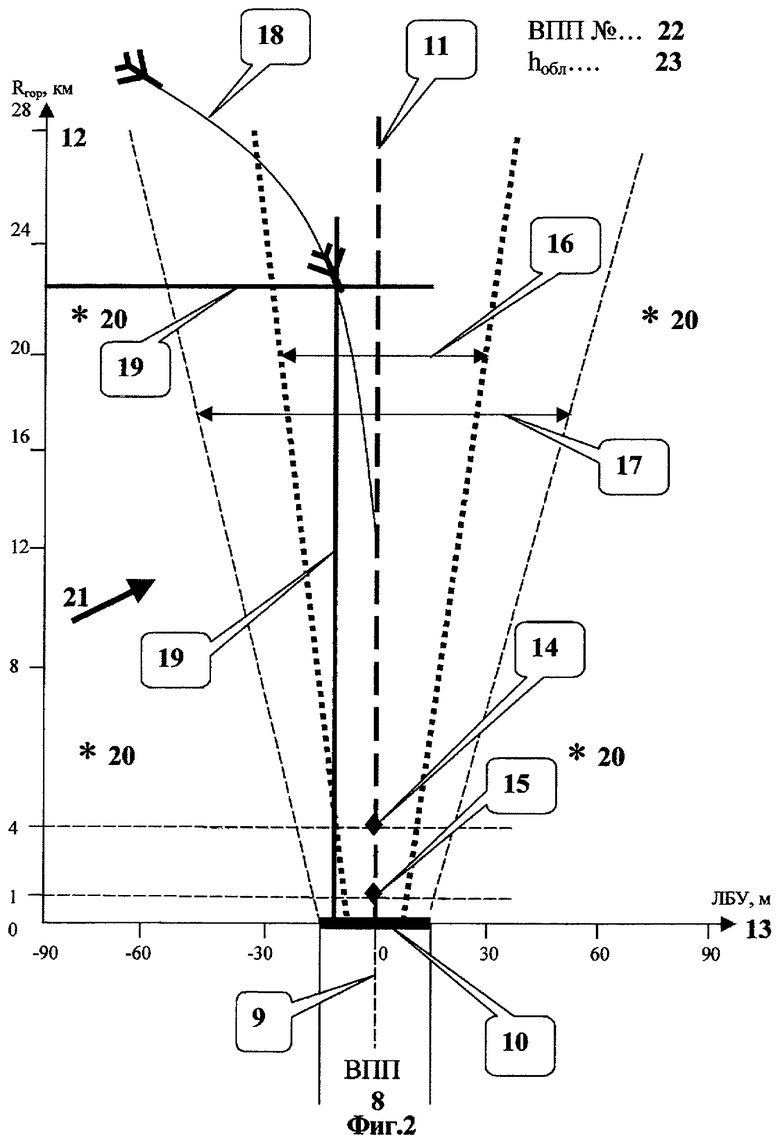
На этих фигурах приведены в совмещенном виде в одной общей системе координат схематическое изображение ВПП 8 (на Фиг.2), расположение дальнего и ближнего радиомаркерных приводов 14 и 15, линии расчетной траектории снижения и захода на посадку в проекциях на горизонтальной 11 (Фиг.2) и вертикальной плоскостях 31 (Фиг.3), внешний и внутренний туннели движения ВС с учетом допустимых отклонений по курсу и высоте полета (на Фиг.2 - 16 и 17, на Фиг.3 - 29 и 30), текущая траектория движения ВС (на Фиг.2 - 18, на Фиг.3 - 31), его силуэт и бортовой номер 25, а также сервисная информация - направление и скорость ветра 21, высота нижнего края облаков 23, расположение опасных местных предметов вблизи ВПП 20, номер ВПП аэропорта (на Фиг.2 - 22, на Фиг.3 - 33) и другое.
На Фиг.2 представлены:
- схематическое изображение ВПП 8,
- осевая линия ВПП 9, ее продолжение 11,
- проекция текущей траектория снижения (в горизонтальной плоскости), а также номер борта и силуэт ВС 18,
- шкалы Rгор и dлбу 12 и 13,
- внешний и внутренний туннели допустимых отклонений движения 17 и 16,
- линии непосредственного отсчета Rгор и dлбу 19,
- направление и скорость ветра 21,
- номер ВПП 22,
- высота нижнего края облаков 23,
- дальний и ближний приводы 14 и 15,
- опасные местные предметы 20.
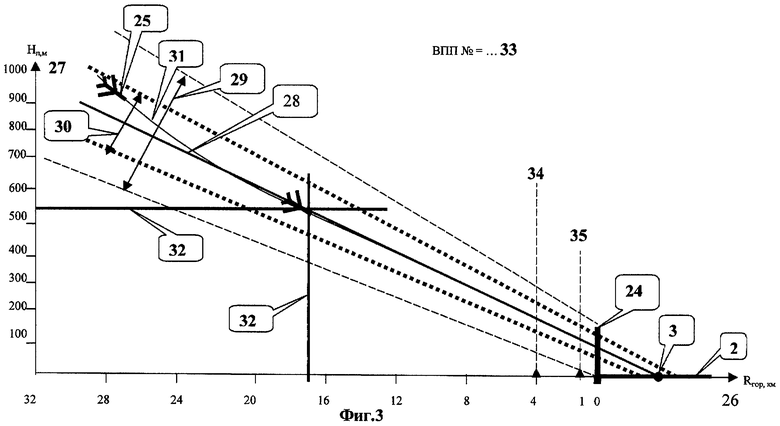
На Фиг.3 представлены:
- торец ВПП 24,
- расчетная точка касания 3, на ВПП 2,
- шкала Rгор 26,
- шкала высоты полета 27,
- расчетная траектория снижения в вертикальной плоскости 28,
- проекция размеров внешнего туннеля на вертикальную плоскость 29,
- проекция размеров внутреннего туннеля на вертикальную плоскость 30,
- силуэт и бортовой номер воздушного судна 25,
- текущая траектория снижения 31,
- линии для отсчета Rгор и Нп 32,
- номер ВПП аэропорта 22.
Изображения на Фиг.2 и 3 могут быть просмотрены по отдельности, поочередно или одновременно, по выбору авиадиспетчера.
Необходимо отметить, что координаты ВС в варианте работы как с бортовым приемовычислителем, так и РЛС аэропорта вычисляются в общей и единой системе координат. В этой же системе координат на указанных рисунках представлено и графическое начертание ВПП 2, построенное по координатам обеих сторон ВПП и осевой линии, предварительно внесенных в память ПЭВМ 7.
Поэтому, как отображение силуэта ВС с учетом его движения, так и ВПП находятся в общей и единой системе координат, принятой для аэронавигации в данном регионе Земного шара. Вычисление пилотажно-навигационных параметров ВС при работе с двумя указанными вариантами координат ВС также осуществляется ПЭВМ 7 в одной и общей системе координат, например геоцентрической или WGS-84 (Word Geodetic System). Необходимый пересчет системы координат в поступающих кодовых сигналах координат ВС выполняется в компьютере ПЭВМ 7 в соответствии с заложенным программным обеспечением.
В варианте с РЛС аэропорта необходимо выполнение дополнительной операции, также связанной с выбором единой системы координат. В частности, исходные геодезические координаты места расположения РЛС в аэропорту требуется пересчитать к координатам расчетной точки касания 3 на ВПП 2. А так как координаты точки 3 ВПП 2 заданы в общей системе координат, то координаты ВС в варианте работы с РЛС будут отсчитываться в той же системе координат как и в варианте работы с бортовым приемовычислителем.
Лучший вариант осуществления изобретения.
Работу системы авиадиспетчерского контроля и назначение входящих в нее устройств следует описать следующим образом.
Начало работы системы необходимо связать с дальностью до ВПП 2 порядка 30-35 км.
Приемовычислитель GPS-Глонасс является частью бортовой навигационной аппаратуры ВС и на этапе полета по эшелону этот блок используется для выполнения задач штурманской проводки и коррекции курса ВС по маршрутным точкам.
Начиная с дальности RВПП=30-35 км значения координат, а также бортовой номер ВС в виде кодовых посылок с выхода приемовычислителя подаются на модулятор радиопередатчика и передаются на КДП. Дальность до ВПП, RВПП является одной из координат ВС, вычисленная в бортовом приемовычислителе. При достижении указанной дальности в приемовычислителе формируется логическая команда, санкционирующая начало режима передачи данных на КДП. Выбор значения Квпп, равное 30-35 км, связан с тем, что ряд пилотажно-навигационных параметров, вычисляемых в ПЭВМ 7, лежат на поверхности Земли, а на указанном удалении ВС от ВПП можно не учитывать кривизну земной поверхности, что повышает точность вычислений и упрощает расчеты.
Структура на выходах, как приемника текущих координат, так и аэропортовских радаров повторяет структуры сигналов соответствующих датчиков. Однако для реализации вычислительных процедур в ЭВМ предлагаемого изобретения и формирования графической дисплейной информации структура указанных сигналов должна соответствовать требованиям их передачи по стандартным интерфейсам для ввода их на входные цепи ЭВМ. Преобразования в блоке преобразования данных предполагается выполнить путем перезаписи потоков информации с выходов приемника текущих координат и радаров аэропорта. Запись и считывание из памяти блока преобразования данных осуществляют одновременно, при этом структура считываемых сигналов соответствует требованиям их передачи по стандартным интерфейсам и будет согласована с входными каскадами ЭВМ.
Принятые кодовые посылки с выхода приемника 4 подаются на один вход блока преобразования данных 5, на другой вход которого подаются кодовые посылки координат ВС, вычисленные РЛС 6 аэропорта. Преобразование к общему виду кодовых посылок в блоке 5 необходимо для их передачи по последовательному интерфейсу на вход компьютера. Назначение РЛС 6 очевидно - обнаружение, сопровождение ВС и вычисление пространственных координат ВС, передача их через блок преобразования данных 5 на ПЭВМ 7.
ПЭВМ 7 является центральным блоком наземного комплекса, который завершает решение основной задачи - обеспечить максимально точное управление выводом ВС на посадочную прямую и выполнение посадки в зоне приземления ВПП вблизи расчетной точки касания, при этом ПЭВМ 7 выполняет следующие операции:
1. Вычисление пилотажно-навигационных параметров ВС и их отклонений от расчетных значений в обоих режимах работы, то есть при приеме координат с борта ВС и приеме координат ВС от РЛС аэропорта.
2. Формирование графических изображений, обеспечивающих точное и наглядное отображение движения силуэта ВС относительно расчетной траектории снижения в пределах максимально допустимых отклонений по курсу и высоте полета, а также формирование сигнала предупреждения при недопустимых отклонениях.
Кроме того, для снижения психофизиологических нагрузок и утомляемости диспетчеров будет использован речевой синтезатор компьютера как один из вспомогательных модулей современных ПЭВМ, для формирования голосовой информации о параметрах движения ВС, об отклонениях параметров от расчетных значений и формирования предупреждающего сигнала. Например, речевой синтезатор может формировать следующие голосовые сообщения (с выходом на наушники диспетчера или динамик):
- борт №..., курс и высота полета в норме,
- борт №..., дальность до ВПП..., высота...
- борт №..., в глиссаде,
- борт №... отклонения недопустимы, и другие.
Указанные в качестве примера голосовые сообщения не только будут снижать общую нагрузку на диспетчера, но при необходимости могут быть транслированы на борт ВС по одному из связных каналов для повышения как степени информированности экипажа, так и взаимодействия с наземным персоналом. Кроме того, видеозапись в память ПЭВМ 7 изображений на Фиг.2, 3 и соответствующих радиопереговоров представляет собой возможность проведения оперативного анализа действий как экипажа, так и диспетчеров, как вариант диспетчерского "черного ящика".
И, наконец, для сведения диспетчера в изображение на Фиг.2 может быть вынесена информация о метеообстановке на подходе к аэропорту, например, направление и скорость ветра 21, высота нижнего края облаков 23, а также расположение опасных местных предметов 20 в зоне аэропорта и другое.
При внедрении настоящего изобретения в аэропортах малой и магистральной авиации будут иметь место следующие преимущества.
1. Повышение точности управления и контроля за движением ВС на уровне современных технологий на этапах вывода ВС в створ и направление осевой линии ВПП независимо от метеоусловий и, следовательно, повышение надежности и безопасности на завершающем этапе полета.
2. Увеличение вероятности успешной посадки с 1 захода независимо от метеоусловий.
3. Раннее предупреждение экипажей об отклонениях от посадочного курса, о близости Земли и опасных местных предметов, например возвышенностей, линий электропередачи, высотных зданий и другое.
4. Возможность передачи на борт сигналов для выполнения корректирующих маневров по курсу и высоте полета.
5. Исключение возможности вывода ВС на посадку на нерабочую в данный момент ВПП и возможность оперативного перепрограммирования направления посадки и номера посадочной ВПП.
6. Малые габариты комплекса, устанавливаемого на КПД, обуславливают возможность оборудования аэропортов 3 и 4 классов без необходимости установки в них громоздких дорогостоящих авиадиспетчерских комплексов, устанавливаемых в крупных аэропортах.
7. Быстрая окупаемость расходов при сравнительно низкой стоимости бортового и наземного оборудования, быстрота ввода в эксплуатацию.
Промышленная применимость
Изобретение может быть использовано для управления заходом на посадку воздушных судов различных классов, в том числе вертолетов, в аэропортах для малой и магистральной авиации, а также для выполнения посадки в экстремальных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2006 |
|
RU2341774C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| Способ определения положения осевой линии взлетно-посадочной полосы | 1991 |
|
SU1804629A3 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Способ контроля и корректировки угла глиссады воздушного судна относительно точки приземления | 1991 |
|
SU1804628A3 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
Изобретение относится к системам управления воздушным движением. Система диспетчерского контроля за воздушным движением в ближней зоне аэропорта включает бортовое оборудование в составе антенны и приемовычислителя текущих координат ВС по сигналам, принятым от группировки навигационных спутников, развернутых по системам GPS/Глонасс, а также связной радиопередатчик для передачи данных на наземный контрольно-диспетчерский пункт. Наземное оборудование системы авиадиспетчерского контроля состоит из антенны и приемника указанных текущих координат, радиолокационной станции аэропорта, блока преобразования данных и компьютера в виде современной персональной ЭВМ. По кодовым сигналам координат, принятым на КДП с борта ВС и от радиолокационной станции аэропорта, и заложенной в память компьютера информации и программы обработки последний осуществляет вычисление пилотажно-навигационных параметров воздушных судов и формирует в общей системе координат совмещенное изображение, содержащее графическое начертание ВПП, линии расчетной траектории снижения ВС, номер борта, силуэт и текущую траекторию движения ВС, а также графическую и сервисную информацию, содержащую коридоры допустимых отклонений по курсу и высоте полета, расположение дальнего и ближнего приводов и опасных местных предметов, направление и скорость ветра, высоту нижнего края облаков, расчетное время прибытия ВС. Отличительной особенностью системы авиадиспетчерского контроля является высокая степень информированности авиадиспетчеров и предельно наглядный, точный и оперативный метод представления суммарной диспетчерской информации при уменьшении психофизиологической нагрузки диспетчера, а также компактность, простота эксплуатации, низкая стоимость оборудования и быстрая окупаемость, что и является достигаемым техническим результатом. 3 ил.
Система авиадиспетчерского контроля за воздушным движением в ближней зоне аэропорта, включающая группировки навигационных спутников, развернутых на орбитах Земли по системам GPS и Глонасс, бортовую аппаратуру воздушного судна в составе антенны и приемовычислителя текущих координат воздушного судна по сигналам, принятым от группировки указанных навигационных спутников, наземное оборудование в составе радиолокационной станции аэропорта, отличающаяся тем, что в бортовую аппаратуру воздушного судна введен радиопередатчик, вход которого подключен к выходу приемовычислителя, для передачи с выхода приемовычислителя по отдельному узкополосному каналу связи в наземное оборудование кодовой информации, включающей кодовую информацию о текущих координатах воздушного судна, бортовой номер воздушного судна и сервисную информацию, при этом в наземное оборудование введены антенна и приемник для приема и обработки передаваемой кодовой информации, блок преобразования данных и персональный компьютер, выход приемника подключен к одному из входов блока преобразования данных, к другому входу которого подключен выход радиолокационной станции аэропорта, выход блока преобразования данных по последовательному интерфейсу подключен к входу персонального компьютера, в котором вычисляются пилотажно-навигационные параметры воздушного судна и их отклонения от расчетных значений по текущим координатам, принятым с борта воздушного судна, и текущим координатам воздушного судна, принятым от радиолокационной станции аэропорта, формируется сигнал предупреждения при недопустимых отклонениях, а также формируются изображения движения силуэта воздушного судна относительно расчетной траектории снижения в пределах допустимых отклонений по курсу и высоте полета.
| Ж | |||
| "AVIONICS", август 1993, с.38, 39 | |||
| УСТРОЙСТВО ДЛЯ ВЫБОРКИ ОРУДИЙ ЛОВА | 0 |
|
SU283723A1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СПОСОБ ВЫДЕЛЕНИЯ АРОМАТИЧЕСКИХ УГЛЕВОДОРОДОВ ИЗ ДЕПАРАФИНИРОВАННОЙ ФРАКЦИИ 200 - 320C | 1997 |
|
RU2139910C1 |
| РАДИОТЕХНИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, ИЗМЕРЕНИЯ СКОРОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2126979C1 |
| ТРЕНАЖЕР ДЛЯ КОМАНДНОГО ПУНКТА С РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2000 |
|
RU2164040C1 |
| US 4196474, 01.04.1980. | |||

