Область техники, к которой относится изобретение
Изобретение относится к области навигации и может использоваться для автономной автоматической посадки беспилотного воздушного судна (БВС) вертикального взлета и посадки на посадочную площадку (ПП).
Уровень техники
Из предшествующего уровня техники известны аналоги изобретения.
1. Система автоматического управления самолетом при заходе на посадку, состоящая из посадочной радиотехнической системы, включающей в себя связанные через радиоканал наземный глиссадный радиомаяк, бортовой глиссадный радиоприемник и дальномер [1]. Также в систему входит блок умножения, вычислитель комплексной системы управления и связанные с ним датчики вертикальной перегрузки, угловой скорости тангажа и угла атаки, рулевой привод, интеграторы, сумматоры и фильтр. Система дополнительно содержит взаимосвязанные фильтры, сумматоры, шесть нелинейных блоков, датчик вмешательства летчика в управление самолетом, датчик угла крена, инвертор, двухпозиционный ключ, три блока статических коэффициентов передачи сигналов и датчик вертикальной скорости полета самолета. Однако система автоматического управления самолетом при заходе на посадку не может быть реализована без радиоканала и оснащенной системой посадки взлетно-посадочной полосы (ВПП), что не может обеспечить автономную автоматическую посадку летательного аппарата (ЛА).
2. Система и способ автоматической посадки ЛА, использующие излучение сигналов антенными решетками курсового и глиссадного радиомаяков и прием курсовым и глиссадным радиоприемниками на борту ЛА указанных сигналов [2]. Однако данные система и способ не могут быть реализованы без радиоканалов и ВПП, оснащенной системой посадки, состоящей из курсовых и глиссадных радиомаяков, что не может обеспечить автономную автоматическую посадку ЛА.
3. Способ обеспечения автоматической посадки ЛА [3]. Группа изобретений относится к способу автоматической посадки ЛА на ВПП и устройству обработки данных и системы обеспечения посадки. Для автоматической посадки ЛА требуется наличие на борту ЛА приемопередатчика, предназначенного для приема сигналов, передаваемых по меньшей мере тремя наземными приемопередатчиками, находящимися на земле. Однако данный способ и устройства не могут быть реализованы без оснащенной системой посадки ВПП, что не может обеспечить автономную автоматическую посадку ЛА.
4. Способ обеспечения автоматической посадки ЛА, заключающийся в том, что оценивают место и ориентацию летательного аппарата, измеряют высоту полета, азимут относительно контрольной точки, управляют ЛА вдоль заданной траектории от точки возвращения до заданной точки захвата, управляют ЛА вдоль заданной траектории от точки захвата к точке захода на посадку, управляют ЛА от точки захода на посадку до точки приземления [4]. Система содержит инерциальный блок, альтиметр, индикатор отклонения курса, устройство обработки данных, выполненное с возможностью осуществления способа. Однако данный способ и система не могут быть реализованы без оснащенной системой посадки ВПП, что не может обеспечить автономную автоматическую посадку ЛА.
Также известны комплексы автономной автоматической посадки ЛА и способы, основанные на их использовании: система автоматического управления по крену и курсу беспилотного летательного аппарата при посадке [5], система автоматического управления боковым движением самолета при заходе на посадку [6], способ автоматического управления боковым движением самолета при заходе на посадку [7], способ захода на посадку летательного аппарата и система для его осуществления [8], способ управления летательным аппаратом при заходе на посадку [9], устройство определения навигационной информации для автоматической посадки летательного аппарата на палубу корабля [10], способ автоматического управления продольным движением летательного аппарата на посадке [11], система посадки летательного аппарата на корабль с применением цифровых технологий [12], способ управления посадкой малого беспилотного летательного аппарата [13], способ автоматической посадки беспилотного летательного аппарата для мониторинга протяженных объектов [14], комплексная система управления траекторией летательного аппарата при заходе на посадку [15], система посадки беспилотного летательного аппарата вертикального взлета и посадки [16], система обеспечения посадки вертолета [17], способ управления траекторией летательного аппарата при заходе на посадку [18], беспилотный летательный аппарат и способ безопасной посадки беспилотного летательного аппарата [19], способ навигации, посадки и взлета вертолета [20], устройство обеспечения посадки летательного аппарата [21].
Каждый из рассмотренных в [1-21] комплексов средств автономной автоматической посадки ЛА и способов, основанных на их использовании, ориентирован на решение конкретных специфических задач в ограниченных условиях и не характеризуется универсальностью. При использовании известных комплексов не выполняется перечень требований, предъявляемых к автономной автоматической посадке БВС вертикального взлета и посадки, состоящих в обеспечении достоверного определения координат БВС относительно ПП на большой дальности и высокоточной посадке БВС на нее в автономном автоматическом режиме без использования глобальных навигационных спутниковых систем (GPS/ГЛОНАСС) и развитой инфраструктуры ВПП или ПП.
Из известных аналогов наиболее близким аналогом изобретения (прототипом) является устройство посадки БВС на ВПП, обеспечивающее реализацию способа посадки БВС самолетного типа на ВПП с использованием оптических приборов различного диапазона [22]. В известном устройстве [22] в значительной степени устранены недостатки, указанные при анализе комплексов автономной автоматической посадки и способов, основанных на их использовании [1-21]. Устройство [22] может быть выбрано в качестве технического решения, наиболее близкого к заявляемому.
Особенность известного устройства посадки БВС на ВПП [22], поддерживающего инфракрасные маяки, и обеспечивающего реализацию способа посадки БВС самолетного типа на ВПП с использованием оптических приборов различного диапазона, состоит в том, что дополнительно используют систему технического зрения на борту ЛА, представляющую собой фронтальную видеокамеру с узкополосным инфракрасным фильтром, получающую изображения маяков, а также вычислительный модуль, оценивающий вероятность положения маяков, и модуль интеграции с инерциальной навигационной системой и системой управления полетом БВС, при этом не используют радиоканал, связывающий воздушное судно и наземную инфраструктуру.
Известное устройство посадки БВС на ВПП [22] с помощью видеокамеры с узкополосным инфракрасным фильтром фиксирует на кадрах видеопотока излучение от инфракрасных маяков и с помощью модуля обнаружения инфракрасных маяков на кадрах видеокамеры с помощью известных моделей светового распределения маяков, получаемых от модуля моделирования светового распределения маяков, определяет позиции их изображений на кадрах видеопотока от видеокамеры, далее модуль определения относительной ориентации БВС вычисляет относительную ориентацию БВС и передает ее модулю связи с инерциальной навигационной системой, который в свою очередь позволяет сформировать команды управления полетом БВС.
Устройство посадки БВС на ВПП [22] обеспечивает автономную автоматическую посадку БВС самолетного типа на ВПП с использованием оптических приборов различного диапазона за счет эффективного взаимодействия между собой различных внутренних и внешних, аппаратных и программных структурных компонентов.
Вместе с тем, для функционирования устройства посадки БВС на ВПП [22] необходимо развертывание комплекта инфракрасных маяков, пространственно разнесенных вдоль границ ВПП. Выполнение таких работ оправданно в случае постоянного использования устройства [22] для посадки БВС самолетного типа на стационарные ВПП. При применении БВС вертикального взлета и посадки использование комплекта инфракрасных маяков для посадки на ПП является избыточным. В условиях временного использования устройства для посадки БВС на ВПП или ПП оборудование комплектом инфракрасных маяков существенно увеличит трудоемкость использования комплекса средств автономной посадки БВС. Для расчета относительной ориентации БВС используется результат определения позиций изображений инфракрасных маяков на кадрах видеопотока от видеокамеры. Это снижает достоверность определения координат ВПП в силу того, что изображение ВПП непосредственно не распознается. Кроме того, в случае возникновения в окрестности ВПП или ПП неучтенных источников оптического излучения с параметрами, близкими по своим значениям к параметрам используемых инфракрасных маяков, возможны отказы и сбои в работе устройства посадки БВС [22], также ошибка определения ориентации БВС.С учетом указанных недостатков можно говорить об избыточной комплектации устройства [22] инфракрасными маяками для посадки БВС вертикального взлета и посадки на ПП и низкой достоверности определения координат БВС по инфракрасным маякам в условиях использования 1111 с расположенными в окрестности неучтенными источниками оптического излучения.
Таким образом, недостаток известного устройства [22] состоит в избыточной комплектации и низкой достоверности определения координат БВС по инфракрасным маякам в условиях использования известного устройства [22] для посадки БВС вертикального взлета и посадки на ПП с расположенными в окрестности неучтенными источниками оптического излучения.
Раскрытие сущности изобретения
Техническим результатом изобретения является минимизация комплектации комплекса средств автономной посадки БВС и повышение достоверности определения координат БВС в условиях использования изобретения для посадки БВС вертикального взлета и посадки на ПП с расположенными в окрестности неучтенными источниками оптического излучения.
Технический результат достигается за счет технического решения,
состоящего в том, что в устройстве [22] вместо комплекта инфракрасных маяков используется наземный оптический маяк, размещаемый в непосредственной близости от ПП в точке с известными относительно центра ПП координатами и излучающий импульсы в заданном спектральном диапазоне длин волн с заданной временной модуляцией. Модулированные импульсы, излучаемые наземным оптическим маяком, в условиях пространственно-энергетической доступности поступают на вход видеокамеры с узкополосным фильтром, которая выделяет заданный спектральный диапазон длин волн и регистрирует видеопоток с изображением наземного оптического маяка. Видеопоток от видеокамеры с узкополосным фильтром поступает на первый вход вычислительного модуля, который обеспечивает моделирование светового распределения наземного оптического маяка, временную селекцию импульсов, обнаружение наземного оптического маяка на кадрах, определение координат наземного оптического маяка относительно центра фотоприемной матрицы видеокамеры с узкополосным фильтром, определение предварительных координат БВС относительно центра ПП. Это обеспечивает первичное обнаружение ПП и определение предварительных координат БВС относительно центра ПП с использованием одного наземного оптического маяка, который достоверно определяется среди возможных неучтенных источников оптического излучения за счет спектральной и временной селекции. Дополнительно введена видеокамера нижнего обзора, обеспечивающая регистрацию видеопотока с изображением подстилающей поверхности. Видеопоток с изображением подстилающей поверхности от видеокамеры нижнего обзора поступает на второй вход вычислительного модуля, который при наличии ПП в поле зрения видеокамеры нижнего обзора обеспечивает обнаружение ПП по эталонным изображениям, хранящимся в памяти вычислительного модуля, непосредственное определение центра ПП по ее изображению, определение координат центра ПП относительно центра фотоприемной матрицы видеокамеры нижнего обзора, достоверное определение координат БВС относительно центра ПП. Это обеспечивает вторичное обнаружение ПП и достоверное определение координат БВС относительно центра ПП за счет непосредственной обработки изображения ПП. Выход вычислительного модуля соединен с входом модуля интеграции с инерциальной навигационной системой и системой управления полетом. На вход модуля интеграции с инерциальной навигационной системой и системой управления полетом при первичном обнаружении ПП по видеопотоку от видеокамеры с узкополосным фильтром поступают предварительные координаты БВС относительно центра ПП, а при вторичном обнаружении ПП по видеопотоку от видеокамеры нижнего обзора поступают достоверно определенные координаты БВС относительно центра ПП. Для определения координат БВС используются параметры видеокамеры с узкополосным фильтром и видеокамеры нижнего обзора, хранящиеся в памяти вычислительного модуля, а также поступающие с выхода модуля интеграции с инерциальной навигационной системой и системой управления полетом на третий вход вычислительного модуля параметры ориентации видеокамер, дистанция от видеокамер до наземного оптического маяка и ПП, высота расположения БВС над подстилающей поверхностью.
Краткое описание фигур
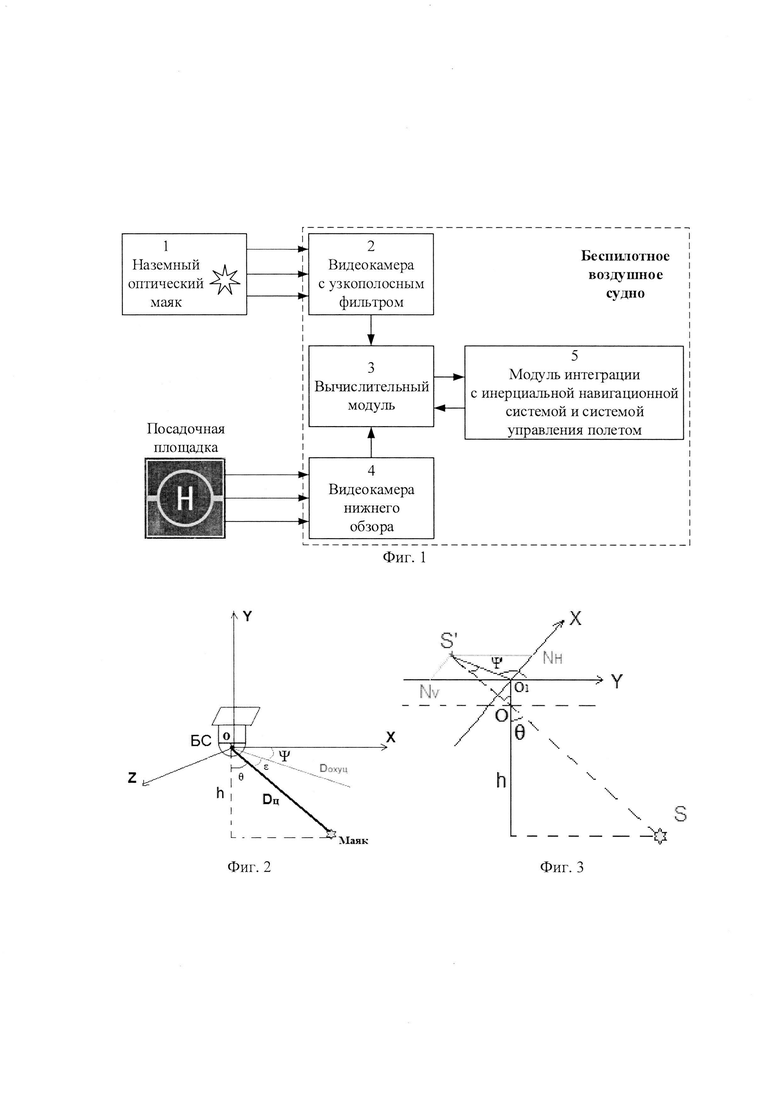
На фиг. 1 представлена структурная схема предлагаемого комплекса средств автономной посадки БВС. Комплекс содержит наземный оптический маяк 1, видеокамеру с узкополосным фильтром 2, вычислительный модуль 3, видеокамеру нижнего обзора 4, модуль интеграции с инерциальной навигационной системой и системой управления полетом 5. В условиях пространственно-энергетической доступности наземный оптический маяк 1 соединен атмосферным оптическим каналом с входом видеокамеры с узкополосным фильтром 2. Выход видеокамеры с узкополосным фильтром 2 подключен к первому входу вычислительного модуля 3. Выход видеокамеры нижнего обзора 4 подключен к второму входу вычислительного модуля 3. Выход модуля интеграции с инерциальной навигационной системой и системой управления полетом 5 подключен к третьему входу вычислительного модуля 3. Выход вычислительного модуля 3 соединен с входом модуля интеграции с инерциальной навигационной системой и системой управления полетом 5.
На фиг. 2 представлена система координат комплекса средств автономной посадки БВС, включающего расположенные в точке О видеокамеру с узкополосным фильтром 2 и видеокамеру нижнего обзора 4, параметры ориентации видеокамеры с узкополосным фильтром 2 и видеокамеры нижнего обзора 4, дистанцию от видеокамеры с узкополосным фильтром 2 и видеокамеры нижнего обзора 4 до наземного оптического маяка 1 и ПП. На фиг. 2 введены следующие обозначения: OXYZ - система координат, связанная с центром фотоприемной матрицы видеокамеры с узкополосным фильтром 2 или видеокамеры нижнего обзора 4; OY - ось, ортогональная плоскости матрицы; ОХ - ось, направленная вдоль центральной линии БВС; OZ - ось, ортогональная ОХ и ОУ и образующая правую систему координат; ε - угол элевации (угол места); θ - надирный угол; Ψ - курсовой угол; Dц - дистанция от точки О до наземного оптического маяка 1 и ПП; Dохуzц - проекция дистанции от точки О до наземного оптического маяка 1 и ПП на плоскость ZOX; h - высота расположения БВС над подстилающей поверхностью.
На фиг. 3 представлена декартовая система координат, связанная с фотоприемной матрицей видеокамеры с узкополосным фильтром 2 или видеокамеры нижнего обзора 4. На фиг. 3 введены следующие обозначения: OXY - декартовая система координат, связанная с центром фотоприемной матрицы; OY - ось, направленная вдоль направления полета БВС; ОХ - ось, ортогональная OY и лежащая в плоскости фотоприемной матрицы; S - наземный оптический маяк 1, размещаемый в непосредственной близости от ПП; S' - изображение наземного оптического маяка 1 на фотоприемной матрице видеокамеры с узкополосным фильтром 2 или изображение ПП на фотоприемной матрице видеокамеры нижнего обзора 4; О - центр съемки видеокамеры с узкополосным фильтром 2 или видеокамеры нижнего обзора 4; O1 - центр фотоприемной матрицы видеокамеры с узкополосным фильтром 2 или видеокамеры нижнего обзора 4; ОО1 - фокусное расстояние объектива видеокамеры с узкополосным фильтром 2 или видеокамеры нижнего обзора 4; θ - надирный угол; Ψ - курсовой угол; NV - число пикселей отклонения по надирному (вертикальному) углу; NH - число пикселей отклонения по горизонтальному углу; h - высота расположения БВС над подстилающей поверхностью.
Осуществление изобретения
Работает предлагаемый комплекс следующим образом. Перед полетом БВС в память вычислительного модуля 3 вводятся эталонные изображения ПП, представляющие ПП с разных ракурсов и в разных метеоусловиях, и параметры видеокамеры с узкополосным фильтром 2 и видеокамеры нижнего обзора 4. После начала полета БВС в предварительно заданный момент времени включается наземный оптический маяк 1, который начинает излучать модулированные импульсы. Перед осуществлением посадки под действием системы управления полетом БВС перемещается в зону, в которой расположена ПП. При подлете БВС к ПП по сигналу от системы управления полетом включается комплекс средств автономной посадки БВС. На третий вход вычислительного модуля 3 с выхода модуля интеграции с инерциальной навигационной системой и системой управления полетом 5 с заданным интервалом времени поступают параметры ориентации видеокамеры с узкополосным фильтром 2, видеокамеры нижнего обзора 4, дистанция от видеокамеры с узкополосным фильтром 2, видеокамеры нижнего обзора 4 до наземного оптического маяка 1 и ПП, высота расположения БВС над подстилающей поверхностью. По мере приближения БВС к ПП возникают условия пространственно-энергетической доступности наземного оптического маяка 1 для видеокамеры с узкополосным фильтром 2, с выхода которой на первый вход вычислительного модуля 3 поступает видеопоток с изображением наземного оптического маяка 1. Вычислительный модуль 3 с заданным интервалом времени выполняет моделирование светового распределения наземного оптического маяка 1, временную селекцию импульсов, обнаружение наземного оптического маяка 1 на изображении в видеопотоке от видеокамеры с узкополосным фильтром 2, определение координат наземного оптического маяка 1 относительно центра фотоприемной матрицы видеокамеры с узкополосным фильтром 2, определение предварительных координат БВС относительно центра ПП. Предварительные координаты БВС определяются на основе расчета угла места ε и азимута Ψ наземного оптического маяка 1 по формулам:
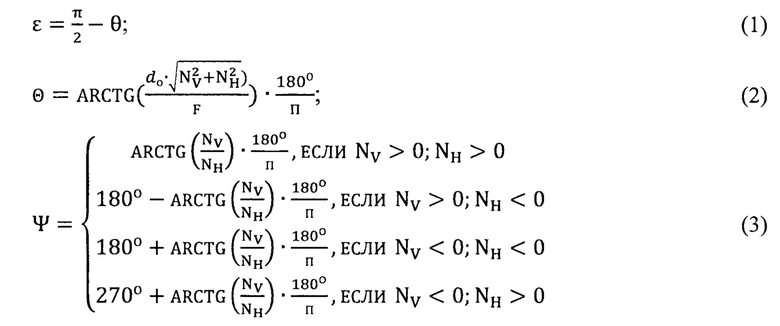
где θ - надирный угол;
d0 - размер пикселя фотоприемной матрицы видеокамеры с узкополосным фильтром 2 или видеокамеры нижнего обзора 4;
NV - число пикселей отклонения по надирному (вертикальному) углу;
NH - число пикселей отклонения по горизонтальному углу;
F - фокусное расстояние объектива 001 видеокамеры с узкополосным фильтром 2 или видеокамеры нижнего обзора 4 (фиг. 3).
Таким образом в вычислительном модуле 3 выполняется первичное обнаружение ПП и определение предварительных координат БВС относительно центра ПП с использованием наземного оптического маяка 1. С выхода вычислительного модуля 3 с заданным интервалом времени предварительные координаты БВС относительно центра ПП поступают на вход модуля интеграции с инерциальной навигационной системой и системой управления полетом 5, по которым выполняется управление полетом БВС для выполнения посадки. Видеокамера нижнего обзора 4 производит регистрацию видеопотока с изображением подстилающей поверхности, который с выхода видеокамеры нижнего обзора 4 передается на второй вход вычислительного модуля 3. Вычислительный модуль 3 с заданным интервалом времени производит обработку видеопотока с изображением подстилающей поверхности с использованием известного алгоритма обнаружения объекта по эталонным изображениям [23-25], хранящимся в памяти вычислительного модуля 3. При наличии ПП в поле зрения видеокамеры нижнего обзора 4 вычислительный модуль 3 производит обнаружение ПП по эталонным изображениям ПП, определяет центр ПП непосредственно по ее изображению, определяет координаты центра ПП относительно центра фотоприемной матрицы видеокамеры нижнего обзора 4. С использованием формул (1), (2), (3) в вычислительном модуле 3 рассчитываются угол места ε и азимут Ψ центра ПП для достоверного определения координат БВС относительно центра ПП. В том случае, если в вычислительном модуле 3 производится определение координат БСВ с распознаванием ПП по видеопотоку от видеокамеры нижнего обзора 4, то с выхода вычислительного модуля 3 эти координаты с заданным интервалом времени передаются на вход модуля интеграции с инерциальной навигационной системой и системой управления полетом 5. Таким образом в вычислительном модуле 3 выполняется вторичное обнаружение ПП и достоверное определение координат БВС относительно центра ПП за счет непосредственной обработки изображения ПП. Вычисленные значения координат БВС относительно центра ПП используются в системе управления полетом для формирования сигналов управления посадкой БВС. Процесс определения координат БВС относительно центра ПП осуществляется до выполнения посадки БВС. Достоверность определения координат БВС относительно центра ПП повышается по мере приближения БВС к ПП за счет определения центра ПП непосредственно по изображению от видеокамеры нижнего обзора 4 и постепенного улучшения качества распознаваемого изображения 1111 вследствие сокращения дистанции от БВС до ПП.
Реализация предлагаемого комплекса позволит минимизировать комплектацию комплекса средств автономной посадки БВС и повысить достоверность определения координат БВС в условиях использования комплекса для посадки БВС вертикального взлета и посадки на ПП с расположенными в окрестности неучтенными источниками оптического излучения.
Источники информации
1. Система автоматического управления самолетом при заходе на посадку. Патент RU 2537201 С2, 23.11.2012, Архипкин Ю.Н (RU), Гордеев А.В. (RU), Кабаков В.Б. (RU) и др.
2. Система и способ автоматической посадки летательных аппаратов. Патент RU 2468964 С1, 11.10.2011, Андреев Г.И. (RU), Силкин А.Т. (RU), Воробьев Н.В. (RU), Грязнов В.А. (RU).
3. Способ обеспечения автоматической посадки летательного аппарата. Патент RU 2666479 С1, 15.07.2016, Шиодини A. (FR), Дюфрен де Вирель Ф. (FR), Пуйар С.(FR).
4. Способ обеспечения автоматической посадки летательного аппарата. Патент RU 2703412 С2, 16.03.2016, Шиодини A. (FR), Пуйар С.(FR).
5. Система автоматического управления по крену и курсу беспилотного летательного аппарата при посадке. Патент RU 2784883 С1, 19.05.2022, Михайлин Д.А. (RU), Лебедев Г.Н. (RU), Ивашова Н.Д. (RU).
6. Система автоматического управления боковым движением самолета при заходе на посадку. Патент RU 2662576 С1, 11.09.2017, Евдокимчик Е.А. (RU), Кабаков В.Б. (RU), Казаков Е.В. (RU).
7. Способ автоматического управления боковым движением самолета при заходе на посадку. Патент RU 2449922 С1, 15.11.2010, Воробьев А.В. (RU), Мурашов Г.А. (RU), Штейнгардт Б.Х. (RU).
8. Способ захода на посадку летательного аппарата и система для его осуществления. Патент RU 2559196 С1, 21.05.2014, Александров В.К. (RU).
9. Способ управления летательным аппаратом при заходе на посадку. Патент RU 2598111 С9, 30.12.2014, Криворучко Ю.Т. (RU), Пономаренко Б.В. (RU).
10. Устройство определения навигационной информации для автоматической посадки летательного аппарата на палубу корабля. Патент RU 181020 U1, 17.07.2017, Кислицын Ю.Д. (RU), Кожухов И.В. (RU), Иванов Л.А. (RU) и др.
11. Способ автоматического управления продольным движением летательного аппарата на посадке. Патент RU 2708785 C1, 11.12.2018, Кичигин Е.К. (RU), Комаров А.В. (RU), Кичигин А.Е. (RU).
12. Система посадки летательного аппарата на корабль с применением цифровых технологий. Патент RU 2734173 C1, 12.02.2020, Безруков А.И. (RU), Дикусар В.В. (RU), Калика В.Ю. (RU) и др.
13. Способ управления посадкой малого беспилотного летательного аппарата. Патент RU 2735196 C1, 24.12.2019, Рыбаков Д.В. (RU), Гаврилов Д.А. (RU), Пасечников И.И. (RU), Краюхин А.В. (RU).
14. Способ автоматической посадки беспилотного летательного аппарата для мониторинга протяженных объектов. RU 2503936 C2, 02.02.2012, Завьялов Р.А. (RU), Зайнуллин А.В. (RU), Порошкин К.В. (RU), Ямалиев P.P. (RU).
15. Комплексная система управления траекторией летательного аппарата при заходе на посадку. Патент RU 2520872 С2, 10.07.2012, Беляев М.А. (RU), Гущин Г.М. (RU), Кабаков В.Б. (RU) и др.
16. Система посадки беспилотного летательного аппарата вертикального взлета и посадки. Патент RU 2666975 С1, 22.11.2017, Барбасов К.В. (RU), Барбасов В.К. (RU).
17. Система обеспечения посадки вертолета. Патент RU 2674283 С1, 30.08.2017, Свет В.Д. (RU).
18. Способ управления траекторией летательного аппарата при заходе на посадку. Патент RU 2549506 С2, 18.02.2013, Никулин А.С. (RU), Алексеев А.Н. (RU), Бражник В.М. (RU) и др.
19. Беспилотный летательный аппарат и способ безопасной посадки беспилотного летательного аппарата. Патент RU 2712716 С2, 28.09.2016, Хибль M. (DE).
20. Способ навигации, посадки и взлета вертолета. Патент RU 2578202 С1, 21.10.2014, Брызгалов А.П. (RU), Ковальчук И.В. (RU), Юсупов Р.Г. (RU) и др. (RU).
21. Устройство обеспечения посадки летательного аппарата. Патент RU 2757804 С1, 06.07.2020, Амелин К.Б. (RU), Бестугин А.Р. (RU), Киршина И.A. (RU) и др.
22. Способ посадки БВС самолетного типа на ВПП с использованием оптических приборов различного диапазона. Патент RU 2724908 С1, 17.06.2019, Целовальникова Н.Е. (RU).
23. Zhowei Cai and Nuno Vasconcelos. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages 6154-6162, 2018.
24. Nicolas Audebert, Bertrand Le Saux, and Sebastien Lefevre. Beyond rb: Very high resolution urban remote sensing with multimodal deep networks. ISPRS Journal of Photogrammetry and Remote Sensing, 140:20-32, 2018.
25. Golnaz Ghiasi, Tsung-Yi Lin, and Quo V Le. Nas-fpn: Learning scalable feature pyramid architecture for object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 7036-7045, 2019.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Способ автоматической посадки воздушного судна | 2023 |
|
RU2839178C2 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА) | 2011 |
|
RU2466355C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА С ПОМОЩЬЮ ОПТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2638876C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ВОЗДУШНЫХ СУДОВ | 2023 |
|
RU2835069C1 |
Комплекс средств автономной посадки беспилотного воздушного судна (БВС) для автономной автоматической посадки БВС вертикального взлета и посадки на посадочную площадку содержит размещаемые на борту БВС видеокамеру с узкополосным фильтром, вычислительный модуль, модуль интеграции с инерциальной навигационной системой и системой управления полетом, видеокамеру нижнего обзора, а также размещаемый в непосредственной близости от посадочной площадки в точке с известными относительно центра посадочной площадки координатами и излучающий импульсы в заданном спектральном диапазоне длин волн с заданной временной модуляцией наземный оптический маяк, соединенные определенным образом. Обеспечивается минимизация комплектации комплекса средств автономной посадки БВС и повышение достоверности определения координат БВС в условиях использования изобретения для посадки БВС вертикального взлета и посадки на посадочные площадки с расположенными в окрестности неучтенными источниками оптического излучения. 3 ил.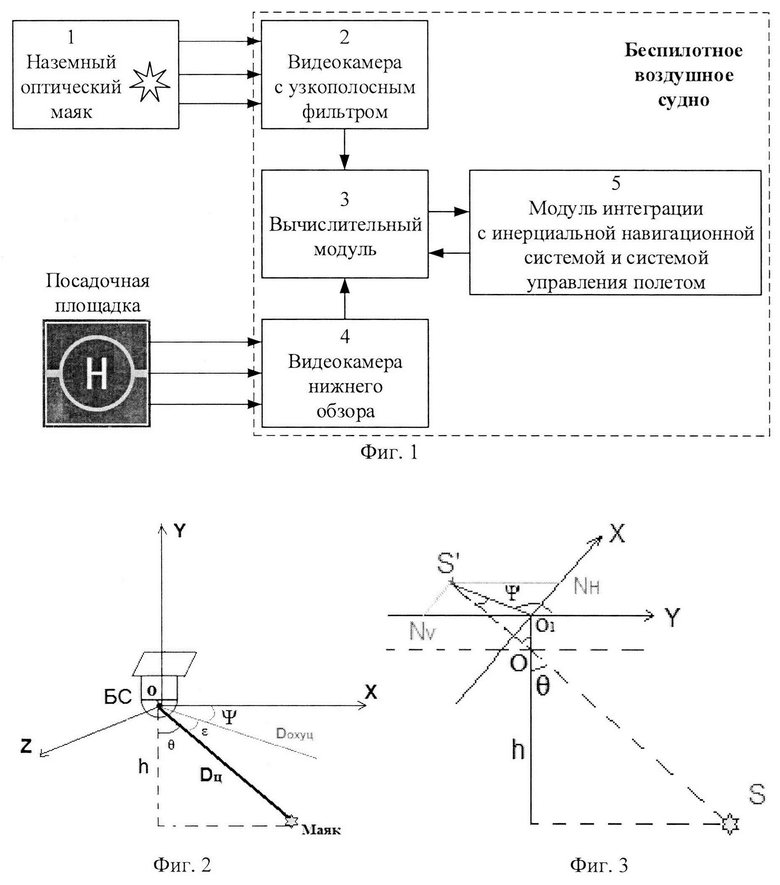
Комплекс средств автономной посадки беспилотного воздушного судна для автономной автоматической посадки беспилотного воздушного судна вертикального взлета и посадки на посадочную площадку, состоящий из видеокамеры с узкополосным фильтром, вычислительного модуля, модуля интеграции с инерциальной навигационной системой и системой управления полетом, причем выход видеокамеры с узкополосным фильтром подключен к первому входу вычислительного модуля, выход вычислительного модуля соединен с входом модуля интеграции с инерциальной навигационной системой и системой управления полетом, отличающийся тем, что используется наземный оптический маяк, размещаемый в непосредственной близости от посадочной площадки в точке с известными относительно центра посадочной площадки координатами и излучающий импульсы в заданном спектральном диапазоне длин волн с заданной временной модуляцией, дополнительно введена видеокамера нижнего обзора, выход которой подключен ко второму входу вычислительного модуля, выход модуля интеграции с инерциальной навигационной системой и системой управления полетом соединен с третьим входом вычислительного модуля, при этом на вход модуля интеграции с инерциальной навигационной системой и системой управления полетом с выхода вычислительного модуля при первичном обнаружении посадочной площадки с использованием спектральной и временной селекции импульсов по изображению наземного оптического маяка от видеокамеры с узкополосным фильтром поступают предварительно определенные координаты беспилотного воздушного судна, а при вторичном обнаружении посадочной площадки по изображению подстилающей поверхности с посадочной площадкой от видеокамеры нижнего обзора поступают достоверно определенные координаты беспилотного воздушного судна.
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| RU 198460 U1, 10.07.2020 | |||
| US 10705541 B2, 07.07.2020 | |||
| US 20210229834 A1, 29.07.2021. | |||

