Данное техническое решение относится к области медицинских реабилитирующих устройств и робототехники, в частности к способам и системам для управления экзоскелетом при реабилитации людей с заболеваниями, приводящими к нарушениям опорно-двигательного аппарата и костно-мышечной системы, а также для использования в качестве человеко-машинных интерфейсов промышленных экзоскелетов.
Мышечная усталость определяется как «неспособность поддерживать требуемую или ожидаемую силу». Это сложное явление, наблюдаемое в повседневной жизни, которое вызвало большой интерес в областях спорта, медицины, робототехники и эргономики. Для многих пациентов с нервно-мышечными нарушениями учет мышечной усталости имеет решающее значение при разработке эффективных программ реабилитации, а оценка усталости может предоставить важную информацию о функции скелетных мышц, а также необходимость ассистирующих моментов в промышленных и медицинских экзоскелетах.
В настоящее время в клинической практике мышечная усталость оценивается с помощью качественных рейтинговых шкал, таких как тест 6-минутной ходьбы (6MWT) [McDonald CM, Henricson EK, Han JJ, Abresch RT, Nicorici A, Elfring GL, Atkinson L, Reha A, Hirawat S, Miller LL. Тест с 6-минутной ходьбой как новый метод оценки результатов при мышечной дистрофии Дюшенна. Muscle Nerve. 2010; 41(4):500-10. https://doi.org/10.1002/mus.21544] или с помощью субъективных опросников, назначаемых пациенту, например, Многомерный перечень усталости (MFI), Шкала тяжести усталости (FSS) и Визуальная аналоговая шкала (VAS) [Лу Дж. С., Вайс М. Д., Картер Г. Оценка и лечение усталости при нервно-мышечных заболеваниях. Am J Hosp Palliat Med. 2010; 27(2):145-57. https://doi.org/10.1177/1049909109358420]. Затруднения в использовании этой и аналогичных шкал обусловлены значительным диапазоном величин мышечной силы между оценками в 4 и 5 баллов.
В биотехнических системах реабилитационного типа поверхностная электромиография (sEMG) является неинвазивным и широко используемым методом оценки мышечной усталости. Некоторые характеристики сигнала sEMG могут быть индикаторами мышечной усталости. Например, во время субмаксимальных задач мышечная усталость будет проявляться снижением скорости и частоты проводимости мышечных волокон и увеличением амплитуды сигнала sEMG [Цифрек М., Медвед В., Тонкович С., Остойич С. Оценка мышечной усталости в биомеханике на основе поверхностной ЭМГ. Clin Biomech. 2009; 24(4):327-40. https://doi.org/10.1016/j.clinbiomech.2009.01.010]. Тенденция и скорость изменения будут зависеть от интенсивности задачи: как правило, амплитуда sEMG, увеличивается во время субмаксимальных усилий и уменьшается во время максимальных усилий; кроме того, наблюдается значительно большее снижение частотного содержания сигнала во время максимальных усилий по сравнению с субмаксимальными [Carr JC, Beck TW, Ye X, Wages NP. Интенсивно-зависимый ответ sEMG для двуглавой мышцы плеча во время устойчивых максимальных и субмаксимальных изометрических сокращений. Eur J Appl Physiol. 2016; 116(9):1747-55. https://doi.org/10.1007/s00421-016-3435-6]. Соответственно, спектральные (например, средняя частота) и амплитудные параметры (например, среднеквадратичное отклонение (RMS)) сигналов могут использоваться для измерения мышечной усталости [Каль Л., Хофманн У. Г. Сравнение алгоритмов количественной оценки мышечной усталости в мышцах верхних конечностей на основе сигналов sEMG. Med Eng Phys. 2016; 38(11):1260-9. https://doi.org/10.1016/j.medengphy.2016.09.009; González-Izal M, Malanda A, Navarro-Amézqueta I, Gorostiaga EM, Mallor F, Ibañez J, Izquierdo M. Спектральные индексы ЭМГ и утомление мышечной силы во время динамических сокращений. J Electromyogr Kinesiol. 2010; 20(2):233-40. https://doi.org/10.1016/j.jelekin.2009.03.011], однако для правильной интерпретации необходимо указать контекст типа и интенсивности сокращения. Значительная проблема большинства существующих протоколов оценки мышечной усталости заключается в том, что они полагаются на количественную оценку максимальной потери произвольной силы, максимального произвольного сокращения мышц (MVC) [Каль Л., Хофманн У.Г. Сравнение алгоритмов количественной оценки мышечной усталости в мышцах верхних конечностей на основе сигналов ЭМГ. Med Eng Phys. 2016; 38(11):1260-9. https://doi.org/10.1016/j.medengphy.2016.09.009; González-Izal M, Malanda A, Navarro-Amézqueta I, Gorostiaga EM, Mallor F, Ibañez J, Izquierdo M. Спектральные индексы ЭМГ и утомление мышечной силы во время динамических сокращений. J Electromyogr Kinesiol. 2010; 20(2):233-40. https://doi.org/10.1016/j.jelekin.2009.03.011] или высокоутомительных динамических задач [Oliveira ASC, Gonçalves M, Cardozo AC, Barbosa FSS. Электромиографический порог усталости двуглавой мышцы плеча во время динамического сокращения. Electromyogr Clin Neurophysiol. 2005; 45(3):167-75], которые невозможно надежно выполнить в клинической практике, особенно в случае, если пациенты - дети.
В процессе двигательной активности задействуется ряд мышц, которые участвуют в выполняемом движении. Эти мышцы называют синергистами. Синергисты - это группа мышц, работающих однонаправленно. Мышечная синергия - это согласованная локальная и временная активность множества мышц, которые связаны друг с другом, чтобы поддерживать высокую производительность выполнения тестового движения или технологической операции. Один из основополагающих принципов динамической системы - самоорганизация. Иными словами, когда система объединяет отдельные части управляющего процесса в целое, ее элементы совместно ведут себя упорядоченным образом. Эта система может достигать скоординированных действий без необходимости выдачи инструкций вышестоящим центром. В процессе нарастания мышечной усталости синхронность работы мышц-синергистов нарушается, и синергия падает. На этой основе предложено ряд технических решений для объективной оценки мышечной усталости по результатам анализа многоканальных sEMG.
Так сущность способа контроля мышечной усталости на основе анализа паттернов синергии [Clinical Model to the Analysis of Synergy Pattern Changes of Back Muscles and its Relationship with the Occurrence of Fatigue/Armin HakKak Moghaddam Torbati, Ehsan Tahami and Hamid Reza Kobravi // The Open Bioinformatics Journal, 2018, 11, 53-60. DOI: 10.2174/1875036201811010052] состоит в том, что на основе анализа sEMG, снятых с различных мышц - синергистов, поддерживающих выполнение одного и того же тестового движения, формировались дескрипторы для обучаемого классификатора, который дискриминировал мышечную усталость на три уровня. В обучающих выборках, формируемых на основе этих дескрипторов, выделялись три кластера усталости мышц в 15-минутном тестовом задании. Уровни усталости мышц определялись на основе экспериментальных исследований, которые фиксировали изменения паттернов sEMG во времени. Экспериментально было установлено, что паттерны sEMG мышц внезапно изменялись на девяностой и на шестисотой секунде выполнения тестовой мышечной нагрузки, что и являлось границами дискриминируемых кластеров.
Основным недостатком этого способа является то, что при формировании кластеров мышечной усталости используют временной подход, тогда как в реабилитационных биотехнических системах и в промышленных роботах необходимо формировать кластеры усталости по соотношению функциональных возможностей оператора или пациента и величине текущей мышечной нагрузки.
Еще один способ, основанный на принципе синергетического мышечного взаимодействия, и который также может быть рассмотрен в качестве аналога, представлен в [Способ оценки мышечной усталости на основе контроля паттернов синергии и устройство для его осуществления / Филист С.А., Трифонов А.А., Кузьмин А.А., Сафронов Р.И., Петрунина Е.В. Патент на изобретение 2766764 C1, 15.03.2022. Заявка №2021105609 от 04.03.2021]. Паттерны мышечной синергии в этом способе, в отличие от способа, описанного выше, формируются посредством образования в каждом канале sEMG частотного и амплитудного подканалов и определения показателя корреляции сигналов в частотных подканалах всех каналов sEMG и показателя корреляции сигналов в амплитудных подканалах всех каналов sEMG. Классификация полученных паттернов синергии осуществляется блока нечеткого логического вывода, на основе результатов которой принимается решение по оценки мышечной усталости.
Основным недостатком этого способа является то, что в нем используется многоканальный анализ sEMG, тогда как в ряде задач диагностики и реабилитации требуется контролировать функциональное состояние конкретной мышцы.
В качестве прототипа был выбран способ классификации мышечной усталости, который основан на мониторинге эволюции показателей одноканальной sEMG. Реализация способа включает следующие процедуры:
1. Сбора данных (запись одноканальной sEMG с соответствующей мышцы).
2. Вычисление непрерывного вейвлет-преобразования (CWT) sEMG каждые 25 секунд. Расчет CWT каждые 25 секунд предлагается для удовлетворения минимальных требований к количеству данных, с которыми можно работать, и медицинских требований, которые защищают здоровье пациента.
3. Расчет общей энтропии вейвлета (TWE) для вейвлет-коэффициентов на каждом интервале. Определение TWE основано на принципе энтропии Шеннона, определяемой как
 ,
,
где pi - распределение вероятностей или относительная энергия вейвлета (RWE) в заданном масштабе:
 ,
,
где k - номер отсчета вейвлет-коэффициента на масштабе с номером i.
Для количественной оценки приращения энергии была выбрана общая (глобальная) энтропия вейвлетов (TWE), поскольку она показала лучшие результаты, чем другие классификаторы энергии вейвлета. TWE определяется как:
 ,
,
где N - максимальный масштаб, используемый в вейвлет-анализе.
4. Расчет процента роста TWE в интервалах по 25 секунд (по отношению к первым 25 секундам).
5. Уровни мышечной усталости определяются определяются на основе процентного роста TWE: рост 1%-136% - первый уровень утомления, рост 137%-199% - второй уровень утомления, рост 200%-280% третий уровень утомления, выше 281% - четвертый уровень утомления.
Этот способ был использован для биоуправления электростимуляцией мышц в биотехнических системах реабилитационного типа, например, электростимуляция должна быть остановлена на уровне мышечного утомления равного двум [Victoria A. Salazar Herrera, J. Franklin Andrade Romero, Mauricio Amestegui Moreno. Algorithm of detection and alert of muscle fatigue in paraplegic patients, by Digital Signal Proccesing of Sur-face Electromyogram // IWSSIP 2010 - 17th International Conference on Systems, Signals and Im-age Processing. Pp. 530-533].
К недостаткам данного способа можно отнести отсутствие возможности адаптации шкалы мышечной усталости к индивидуальным физическим возможностям пациента или оператора, что, в частности, затрудняет формирование дата сет для систем машинного обучения по показателям sEMG, а также то, что в этом способе учитываются только эволюции вейвлетов либо только во времени, либо глобальная эволюция, то есть при построении дескрипторов не дифференцируется эволюция вейвлетов по частоте и по времени в соответствующих двадцати пяти секундных окнах.
Технической задачей предлагаемого способа является снижение ошибки классификации уровней мышечной усталости посредством использования в качестве классификаторов моделей машинного обучения.
Поставленная задача достигается тем, что в известном способе оценки мышечной усталости, заключающемся в получении sEMG сигнала с мышцы, принимающей участие в тестовой функциональной пробе или технологической операции, сегментации его по определенному правилу, позволяющему сформировать временную последовательность сегментов, определении полученных этих сегментов для последующего исследования их энергетической эволюции и построении дескрипторов для классификатора мышечной усталости, для стратификации мышечной усталости в текущий период функциональной пробы исследуют вейвлет-плоскость сегмента sEMG, соответствующего интервалу двигательной активности в текущем периоде функциональной пробы, и на основе ее анализа формируют два вектора дескрипторов, первый из которых определяется путем вычисления глобальной энтропии вейвлетов в строках (масштабах) вейвлет-плоскости, а второй определяется путем вычисления глобальной энтропия вейвлетов в столбцах вейвлет-плоскости, при этом во второй вектор дескрипторов включают только компоненты, которые превышают пороговое значение, установленное таким образом, чтобы оно принимало максимальное значение порога, не приводящее к пропуску индексов внутри оставшейся последовательности компонентов вектора.
Для формирования обучающей выборки для обучения классификатора мышечной усталости из дата сет, полученного на основе вейвлет-анализа сегментов sEMG, для каждого пациента из экспериментальной группы определяется индивидуальная шкала мышечной усталости путем двухэтапного эксперимента с тестовой нагрузкой, на первом этапе которого устанавливается предельная мышечная усталость, определяемая показателем нагрузка-время, при равной для всех пациентов нагрузке на тестируемую мышцу, а на втором этапе, который осуществляется после выполнения первого этапа всеми пациентами экспериментальной группы, определяется среднее время достижения предельной мышечной усталости в экспериментальной группе, после чего устанавливается тестовая нагрузка для каждого пациента таким образом, чтобы мышечная усталость для каждого пациента достигла своего предельного значения за установленное среднее время.
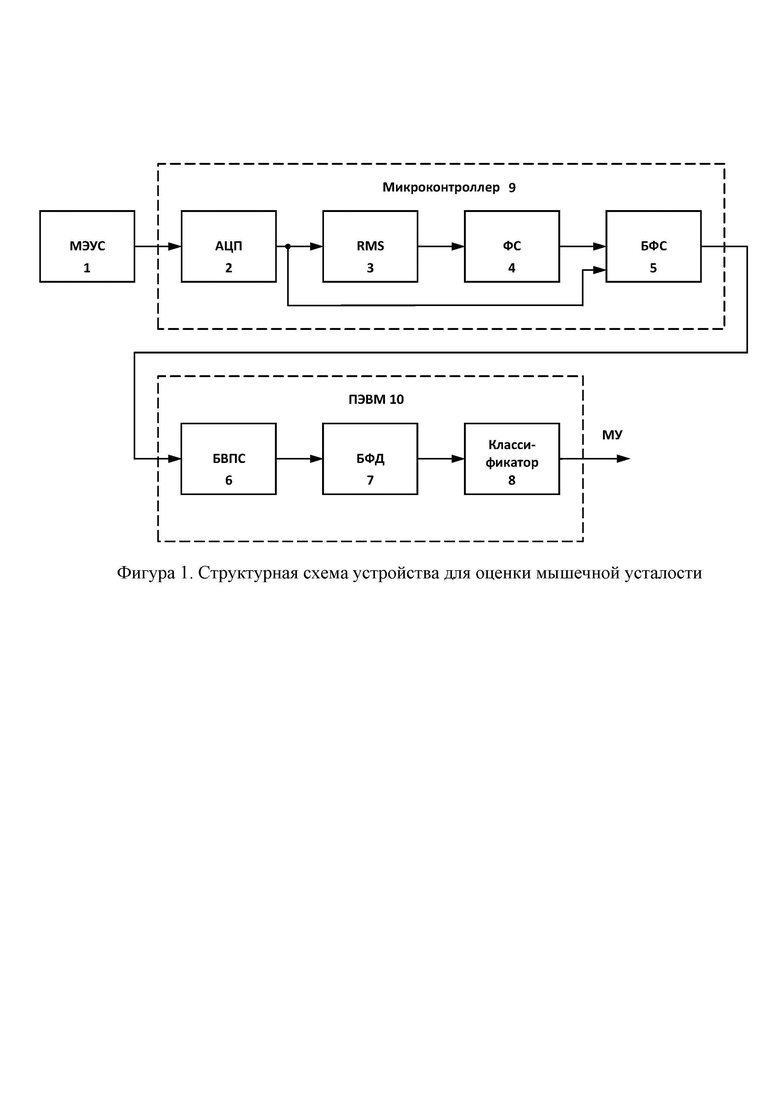
На фиг. 1 представлена структурная схема устройства, осуществляющего предлагаемый способ.
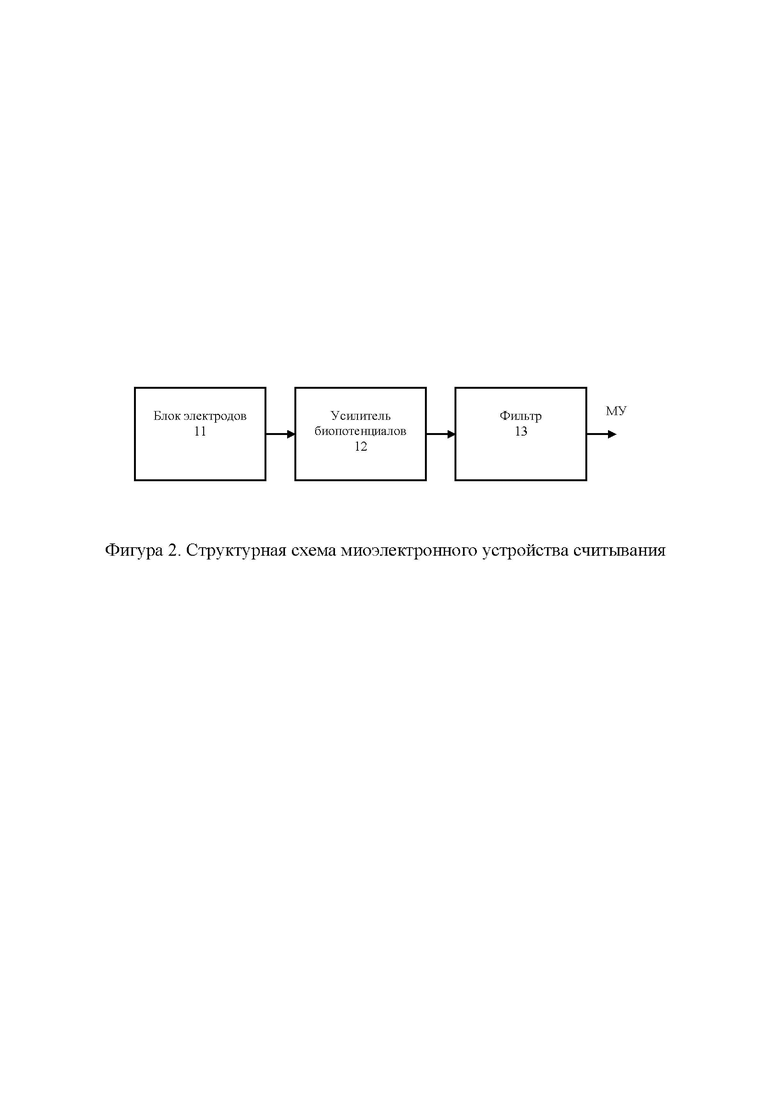
На фиг. 2 представлена структурная схема миоэлектронного устройства считывания на примере одного канала ЭМГ.
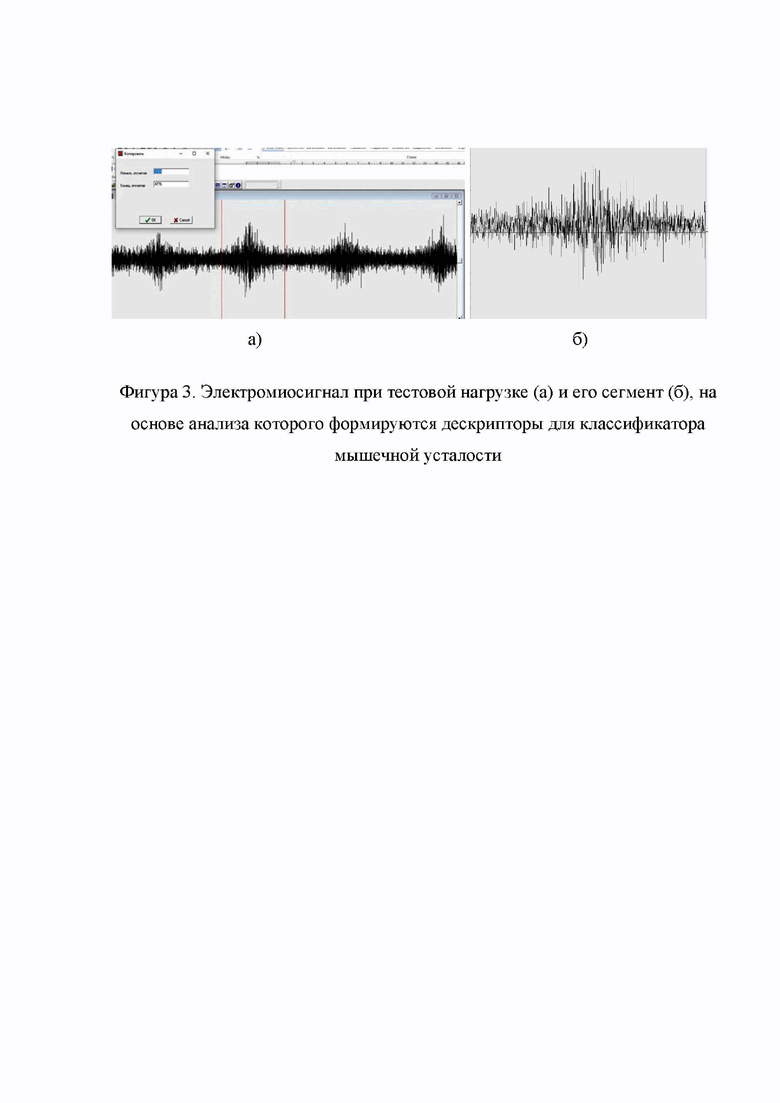
На фиг. 3 показаны эпюры электромиосигнала. На фиг. 3а - запись нескольких периодов двигательной активности, а на фиг. 3б сегмент электромиосигнала, соответствующий двигательной активности исследуемой мышцы.
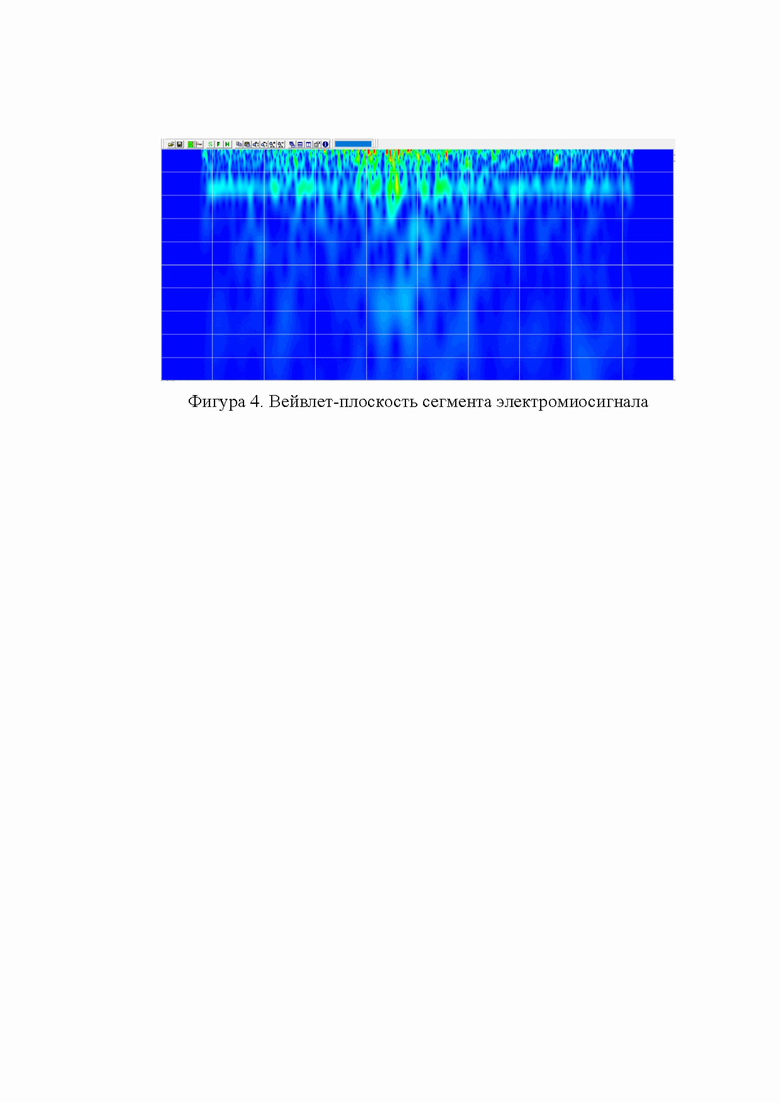
На фиг. 4 представлена вейвлет-плоскость электромиосигнала, графическое представление которого показано на фигуре 3б.
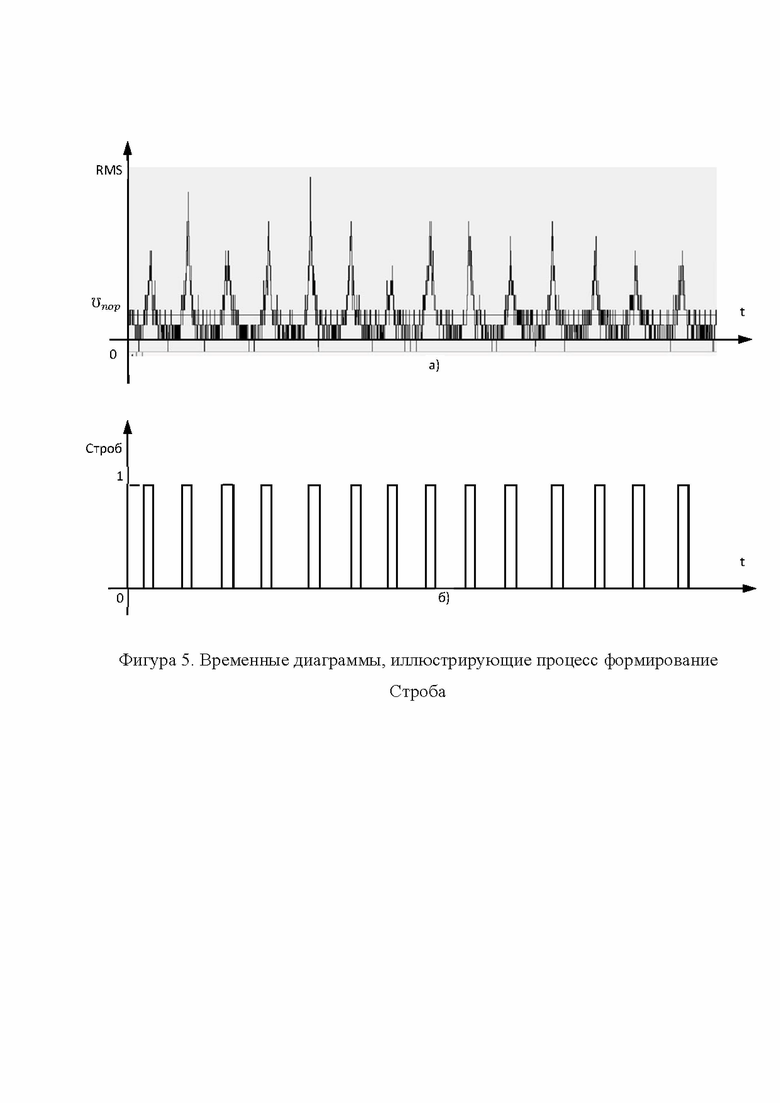
На фиг. 5 представлены временные диаграммы, иллюстрирующие процесс формирование Строба.
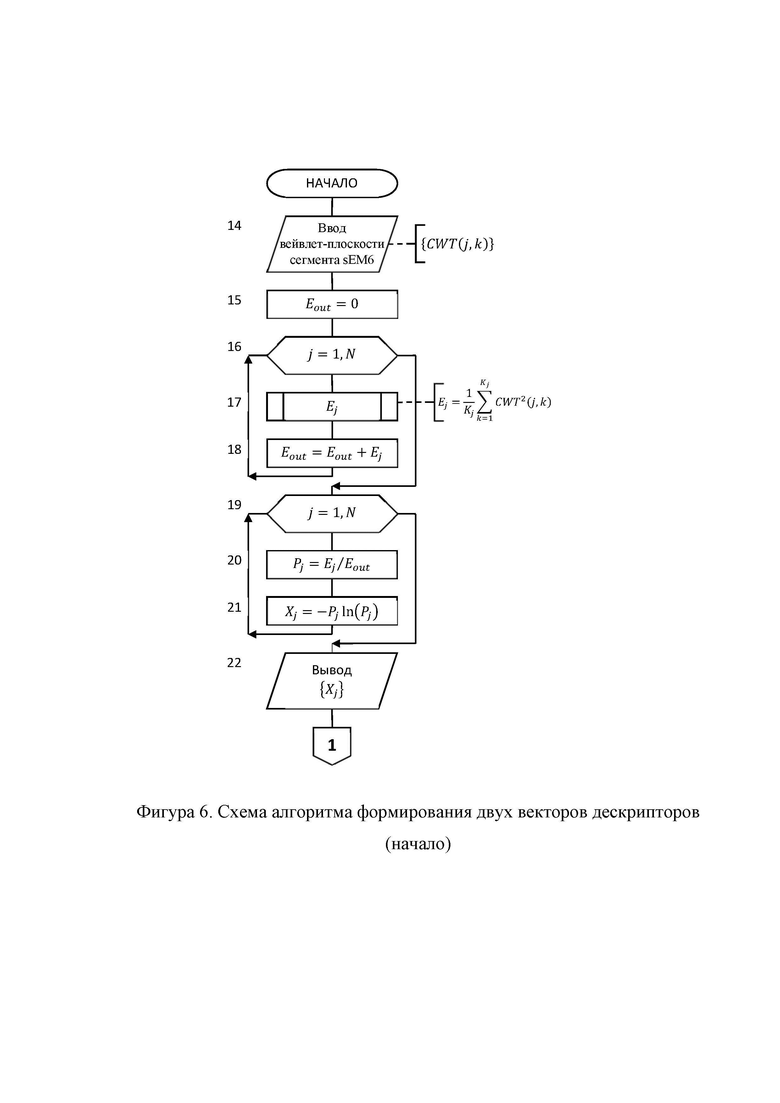
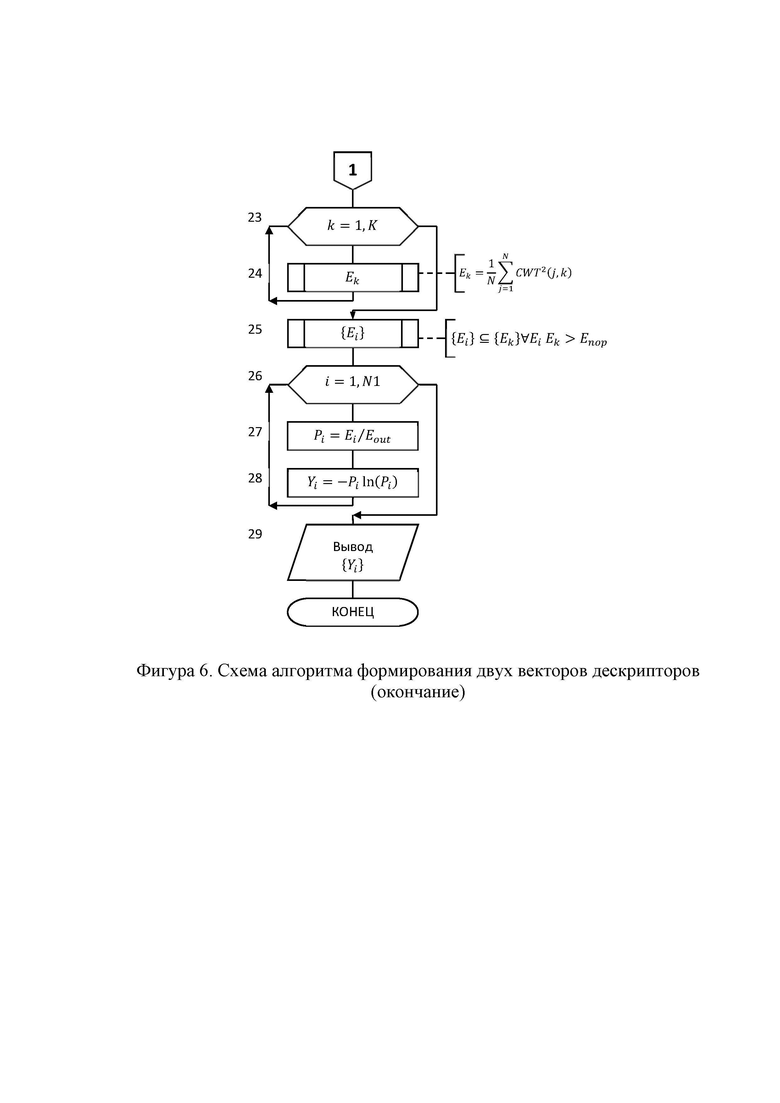
На фиг. 6 представлена схема алгоритма формирования двух векторов дескрипторов.
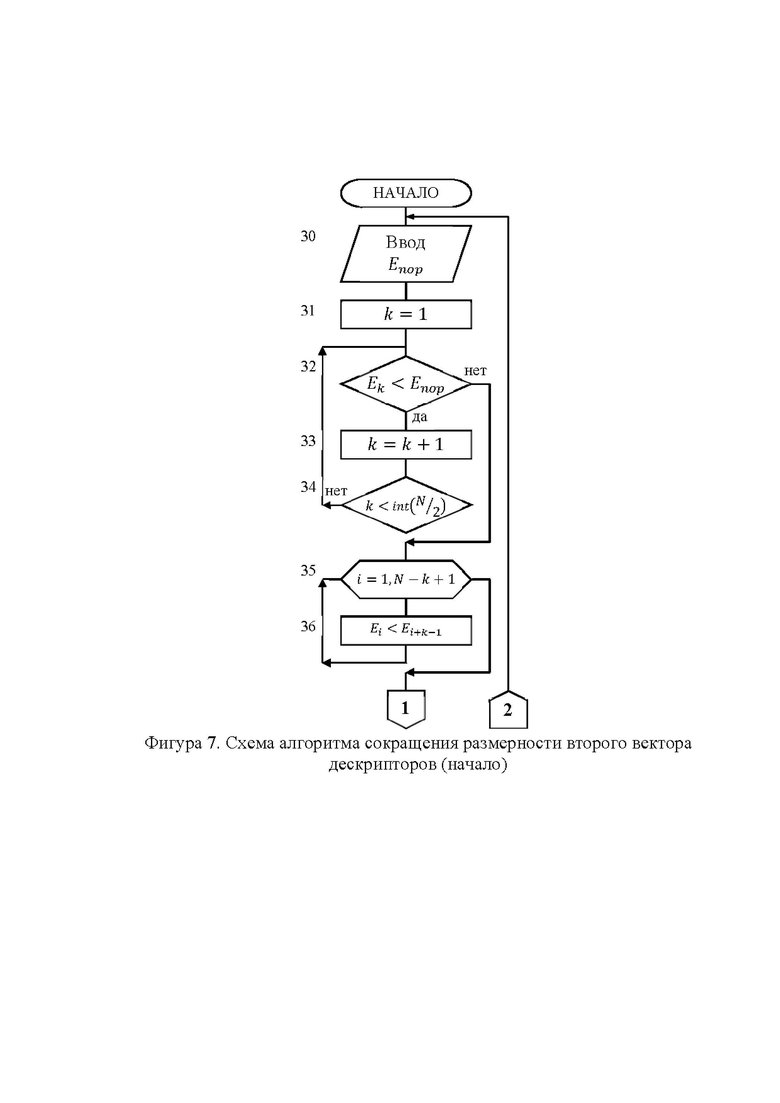
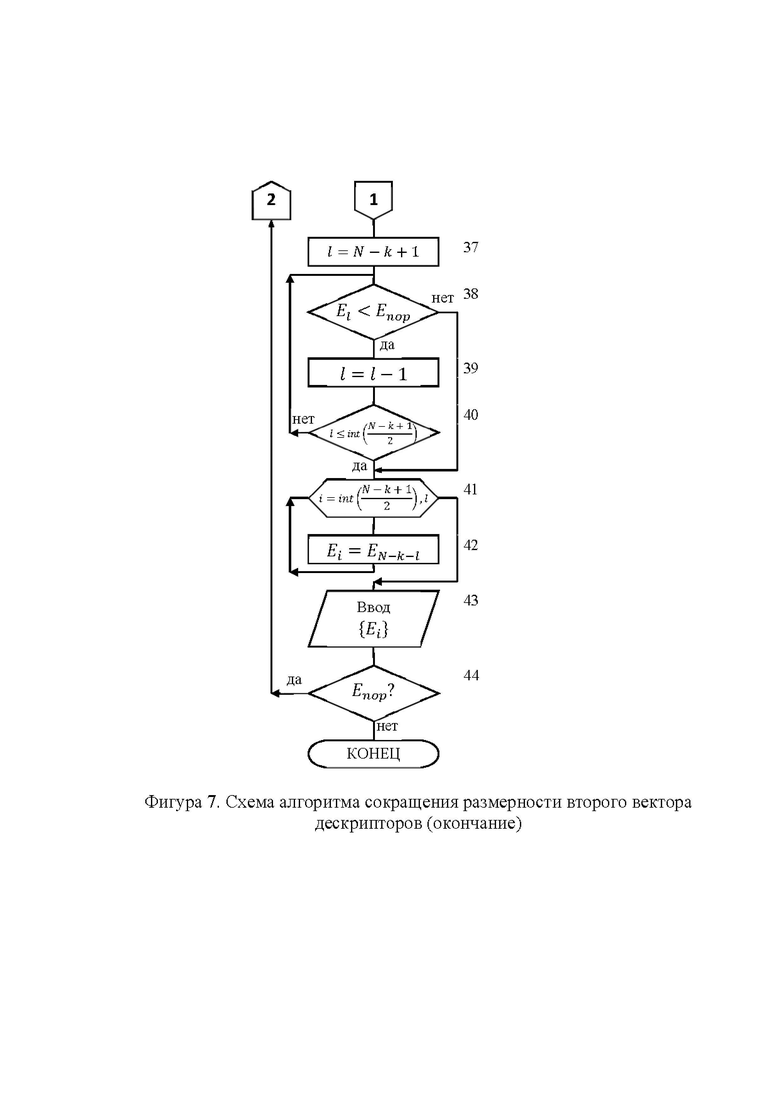
На фиг. 7 представлена схема алгоритма блока сокращения размерности второго вектора дескрипторов.
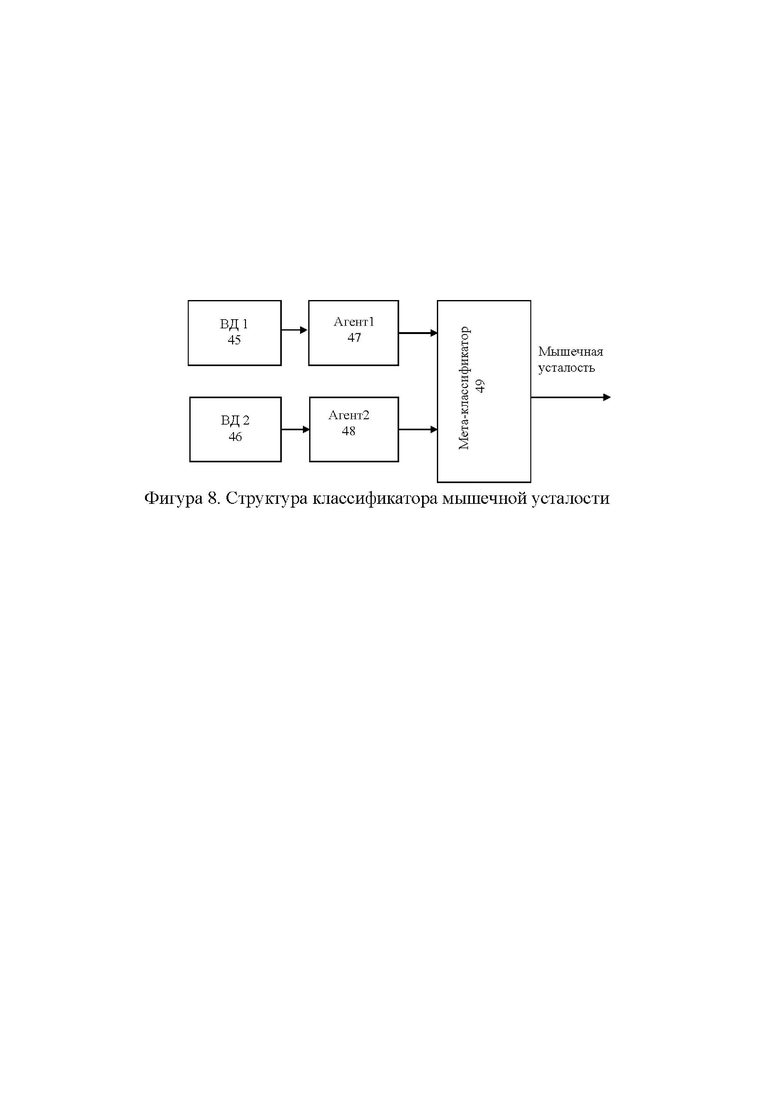
На фиг. 8 представлена структура классификатора мышечной усталости, построенного по мультиагентной идеологии.
На фиг. 9 представлен общий вид кисти с динамометром при проведении эксперимента по построению универсальной шкалы мышечной усталости.
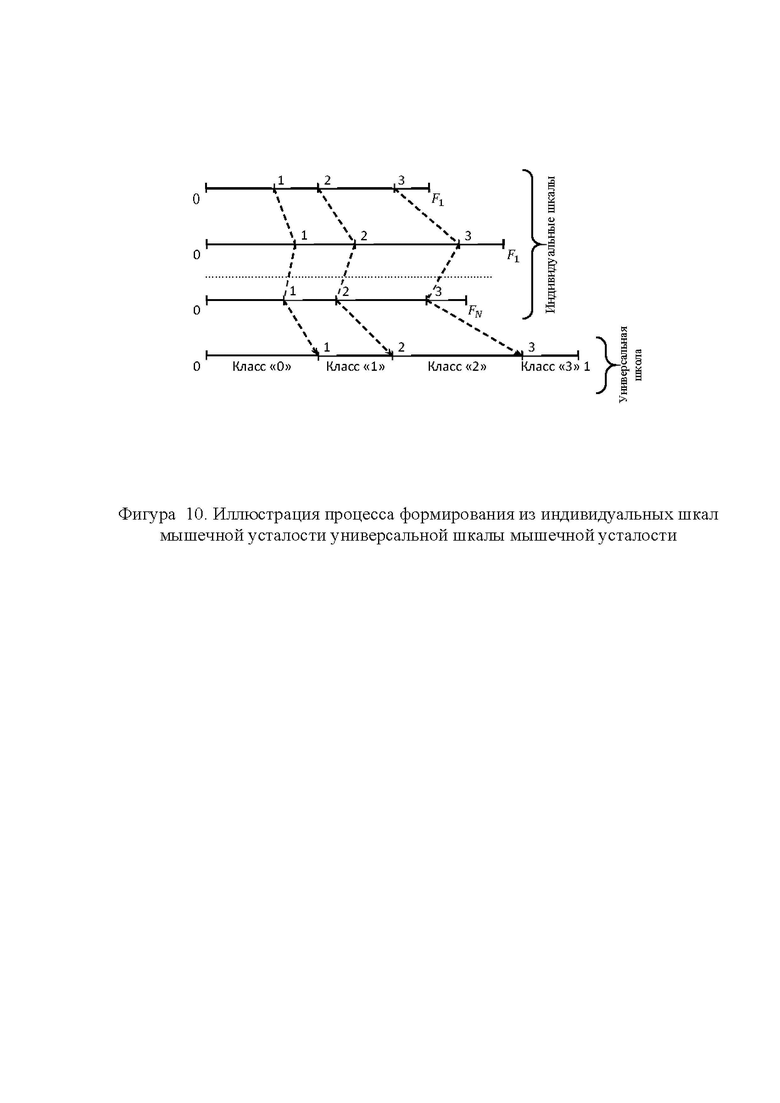
Фиг. 10 иллюстрирует процесс формирования из индивидуальных шкал мышечной усталости универсальной шкалы мышечной усталости.
Устройство фиг. 1 состоит из последовательно соединенных миоэлектронного устройства считывания (МЭУС) 1, аналого-цифрового преобразователя (АЦП) 2, блока вычисления RMS 3, формирователь строба (ФС) 4, блок формирования сегмента (БФС) 5, блок вейвлет - преобразования сегмента (БВПС) 6, блок формирования дескрипторов (БФД) 7 и классификатор МУ 8. При этом блоки 2, 3, 4 и 5 выполнены на базе микроконтроллера 9, а блоки 6, 7 и 8 выполнены на базе ПЭВМ 10.
Миоэлектронное устройство считывания фиг. 2 состоит из последовательно соединенных блока электродов 11, усилителя биопотнциалов 12 и полосно-пропускающего фильтра 13.
Сущность способа заключается в получении вейвлет-преобразования (CWT) сегмента sEMG, который во временном интервале соответствует двигательной активности исследуемой мышцы, с последующим получением дескрипторов для использования их в классификаторе мышечной усталости. На фигуре 3а показан сигнал sEMG мышцы, выполняющей периодическую тестовую нагрузку. Интервал двигательной активности выделен двумя вертикальными линиями красного цвета. Для формирования дескрипторов используем вейвлет-преобразование этого сегмента, эпюра которого представлена на фигуре 3б. Вейвлет-плоскость этого сегмента представлена на фигуре 4. Вейвлет-плоскость построена для нижней частоты 20 Гц.
Учитывая логику работы классификатора, мышечная усталость должна контролироваться на каждом периоде двигательной активности исследуемой мышцы, то есть в каждом сегменте. Для выделения сегмента используются три блока: RMS 3, ФС 4 и БФС 5. БФС выделяет из отсчетов sEMG отсчеты, соответствующие двигательной активности мышц. Он имеет два входа и один выход. На первый его вход поступает Строб с ФС, а на второй вход - отсчеты sEMG. Принцип его работы иллюстрирую эпюры sEMG, представленные на фиг. 3. Принцип формирования Строба иллюстрирует фиг. 5. На фиг. 5а представлен сигнал RMS, по которому на уровне 0,9RMS(max) определяется Uпор., а процесс формирования Строба по RMS и Uпор. представлен на фиг. 5б.
Для получения первой группы (вектора) дескрипторов определяем величины вейвлет-энтропии на всех уровнях вейвлет-разложения сегмента. То есть полторы - две тысячи отсчетов на каждом уровне разложения сворачиваются в один компонент вектора дескрипторов по формуле:
 , (1)
, (1)
где j - номер уровня разложения или индекс компоненты в векторе дескриптор,
 , (2)
, (2)
 , (3)
, (3)
CWN(j,k) - амплитуда вейвлет-коэффициента в j-й строке и k-м столбце вейвлет-плоскости, Kj - число вейвлет-коэффициентов на j-м уровне,
 . (4)
. (4)
Таким образом, размерность первого вектора дескрипторов определяется числом уровней детализации N или, другими словами, числом строк вейвлет-плоскости. Максимальное количество уровней детализации определяется числом отсчетов в сигнале К, то есть Nmax=К/2. Nmin или N непосредственно связано с частотой дискретизации (fS) анализируемого сигнала. В случае разложения sEMG, дискредитированного с частотой fS=640 Гц при нижней частоте анализа равной 20 Гц, число уровней декомпозиции N=200 [DWT analysis of numerical and experimental data for the diagnosis of dynamic eccentricities in induction motors / J. Antonino-Daviu [et al.] // Mechanical Systems and Signal Processing. 2007. Vol. 21. No.6. P. 2575 - 2589]. Таким образом, первый вектор будет иметь двести дескрипторов, определяемых по формуле (1).
Для определения компонентов второго вектора используем формулу, аналогичную (1), но энергию вейвлет-коэффициентов определяем по столбцам вейвлет-плоскости:
 , (5)
, (5)
где k - номер отсчета на уровне детализации вейвлет-плоскости,
 , (6)
, (6)
 . (7)
. (7)
В общем случае сегмент sEMG занимает порядка 1,5…2 секунды и в нем может быть свыше полутора тысяч отсчетов. Однако, если обратиться к вейвлет-плоскости фиг. 4, то можно заметить, что максимальная энергия спектра сосредоточена в ее центре. Следовательно, задавшись пороговым значением для энергий в столбцах Eпор., можем использовать для вычисления компонентов второго вектора только те столбики, энергия в которых выше пороговой.
На фиг. 6 показана схема алгоритма формирования двух векторов дескрипторов по сегменту sEMG. В блоке 14 осуществляется ввод вейвлет-коэффициентов сегмента sEMG. В блоках 15…18 определяется общая энергия вейвлет-плоскости, а в блоках 19…21 определяются компоненты первого вектора дескрипторов. В блоке 22 осуществляется вывод этих компонент в виде множества  .
.
Для определения второго вектора дескрипторов используют блоки 23…28. Блоки 23 и 24 выполняют вычисления по формуле (7). Чтобы сократить размерность вектора дескрипторов используют блок 25, в котором осуществляют переход от множества  к множеству
к множеству  . Его схема алгоритма представлена на фиг. 7.
. Его схема алгоритма представлена на фиг. 7.
В блоке 37 лицо, принимающее решение (ЛПР), задает значение Eпор., которое внвчале выполнения алгоритма может быть взято 0,01Eout. В блоках 31…34 осуществляют просмотр левой границы множества и определяют кортеж его элементов, которые не превышают пороговое значение. В блоках 35 и 36 осуществляют исключение элементов этого кортежа из множества , формируя из него его множеством .
В блоках 37…40 осуществляют просмотр правой границы множества и определяют кортеж его элементов, которые не превышают пороговое значение. В блоках 41 и 42 осуществляют исключение элементов этого кортежа из множества  , формируя новое множество .
, формируя новое множество .
В блоке 43 ЛПР осуществляет результат селекции и при необходимости (блок 44) изменяет значение Eпор. в блоке 30 и процесс селекции запускается вновь.
В блоке 26 просматривается полученное множество , на основе элементов которого в блоках 27 и 28 вычисляется второй вектор дескрипторов. В блоке 29 осуществляется его вывод.
Классификатор мышечной усталости построен по многоагентной идеологии. На нижнем уровне находятся автономные интеллектуальные агенты, формирующие пространство информативных признаков для автономных интеллектуальных агентов, находящихся на верхнем иерархическом уровне. На верхнем иерархическом уровне классификатора используем агрегатор, агрегирующий решения модулей классификации медицинского риска, находящихся на нижнем иерархическом уровне. Его структура представлена на фиг. 8.
Она включает два независимых модуля классификаторов мышечной усталости 47 и 48, которые анализируют векторы дескрипторов (45 и 46). В качестве агрегатора (мета-классификатора) была использована нечеткая нейронная сеть, алгоритмы настройки которой подробно описаны в [Гибридный метод контроля мышечной усталости в робототехнической системе / А.А. Кузьмин, Р.А. Томакова, Е.В. Петрунина, Д.А. Ермаков, С. Кадырова // Известия Юго-Западного государственного университета. Серия: Управление, вычислительная техника, информатика. Медицинское приборостроение. 2023. Т. 13, №3. С. 64-81. https://doi.org/10.21869/2223-1536-2023-13-2-64-81], на выходе которого формируется окончательное значение показателя мышечной усталости.
Для формирования обучающей выборки для обучения классификатора мышечной усталости из дата сет, полученного на основе вейвлет-анализа сегментов sEMG, для каждого пациента из экспериментальной группы определяется индивидуальная шкала мышечной усталости путем двухэтапного эксперимента с тестовой нагрузкой, на первом этапе которого устанавливается предельная мышечная усталость, определяемая показателем нагрузка-время, при равной для всех пациентов нагрузке на тестируемую мышцу, а на втором этапе, который осуществляется после выполнения первого этапа всеми пациентами экспериментальной группы, определяется среднее время достижения предельной мышечной усталости в экспериментальной группе, после чего устанавливается тестовая нагрузка индивидуальная для каждого пациента таким образом, чтобы мышечная усталость для пациента достигла своего предельного значения за установленное среднее время. Используя эту нагрузку формируют дата сет для экспериментальной группы из которого формируются обучающие и контрольные выборки.
При обучении классификатора мышечной усталости данные должны быть размечены. Это значит, что для каждого сегмента sEMG должна быть определена соответствующая мышечная усталость. Приведем пример построения универсальной шкалы мышечной усталости. Для исследования характера зависимости sEMG от мышечной усталости будем снимать sEMG в зоне предплечья, где находятся такие мышцы, как поверхностный сгибатель пальцев, длинная ладонная мышца, лучевой сгибатель запястья и др. Одной из главных функций этих мышц является сгибание кисти. Для контроля величины нагрузки на кисть использовался динамометр электронный медицинский типа ДМЭР-120. Общий вид кисти с динамометром и присоединенными электродами представлен на фиг. 9.
На первом этапе испытуемому ставилась задача с такой силой сжимать динамометр, чтобы на экране отображалось и удерживались в течение 5 секунд определенные значения: 5, 10, 15 и т.д. дан (*10 Ньютон). Таким образом, замыкалась биологическая обратная связь, которая позволяет связать регистрируемый параметр sEMG с усилием динамометра. Процесс наращивания нагрузки протекал до тех пор, пока у испытуемого возникала «неспособность поддерживать требуемую или ожидаемую силу».
В заключении первого этапа определялось время выполнения эксперимента i-м испытуемым Ti согласно формуле
 , (8)
, (8)
где Fi - предельная сила удержания i-го испытуемого, t - время удержания фиксированного значения показания динамометра,  - шаг изменения силы на шкале динамометра.
- шаг изменения силы на шкале динамометра.
Затем аналогичные эксперименты проводились у всех членов экспериментальной группы. Определялось среднее время предельной мышечной усталости:
 , (9)
, (9)
где N - число испытуемых в экспериментальной группе.
После определения среднего времени наступления предельной мышечной усталости, можем установить индивидуальную шкалу мышечной усталости для каждого испытуемого путем определения индивидуального шага изменения силы на шкале динамометра
 , (10)
, (10)
или индивидуальное время удержания фиксированного значения показания динамометра
 . (11)
. (11)
Используя формулы (10) или (11), получаем индивидуальные шкалы для мышечной усталости для каждого испытуемого. Чтобы получить универсальную шкалу мышечной усталости, отсчеты по которой можно использовать в качестве Целей в дата сет для модели машинного обучения, отсчеты на шкалах в силе удержания (формула (10)) и во временных отсчетах (формула (11)) необходимо пометить безразмерными метками. Число меток на индивидуальных шкалах одинаково для всех испытуемых. Первая метка составит 30% мышечной усталости на индивидуальной шкале, вторая - 50%, третья 85%.
На втором этапе получают дата сет для модели машинного обучения по классификации мышечной усталости путем сопоставления независимы переменных, представленных в виде пары векторов, соответствующим меткам на индивидуальных шкалах, которые соответствуют меткам по универсальной шкале. Фиг. 10 иллюстрирует процесс сопоставления меток на индивидуальных шкалах и меток на универсальной шкале усталости. В качестве функции Цель используем дислокацию мышечной усталости на индивидуальной шкале и присваиваем функции Цель значение от нуля до трех, в зависимости от того, между какими метками на индивидуальной шкале находится показатель мышечной усталости. В результате получаем таблицу экспериментальных данных, в строках которой хранится информация о каждом пациенте экспериментальной группы, а в столбиках записаны соответствующие независимые переменные и функция Цель. По полученной таким образом таблице экспериментальных данных обучают и тестируют модель машинного обучения.
При осуществлении программы реабилитации в непрерывном режиме с шагом 25 секунд формируют векторы дескрипторов и определяют класс мышечной усталости. Если уровень мышечной усталости соответствует уровню 1…30% на универсальной шкале, то полагают, что это класс «0», и решение по этому классу не принимается, то есть процедура реабилитации выполняется в соответствии с программой реабилитации. Если показатель усталости находится в пределах первой и второй меток, то векторам дескрипторов будет соответствовать первый класс уровня усталости, что соответствует уровню повышенного внимания к пациенту. Если показатель мышечной усталости находится между второй и третьей метками (класс «2»), то электрическая стимуляция должна быть остановлена, а в случае использования экзоскелета должны быть включены серводвигатели для создания соответствующих ассистирующих моментов или ассистирующие моменты должны быть увеличены. Если же показатель мышечной усталости находится за третьей меткой (класс «3»), то тестовая нагрузка на пациента должна быть снята.
Алгоритм, реализующий мониторинг реабилитации посредством предложенного способа, проверен на платформе Matlab® с учетом нескольких тестов и различных начальных условий, представляющих наиболее сложные случаи для управления процессом реабилитации. Все полученные результаты правильно возвращают три класса мышечной усталости.
Таким образом, предложен способ классификации мышечной усталости, основанный на анализе сегментов электромиосигнала, соответствующих периоду мышечной активности испытуемого, позволяющий осуществлять мониторинг функциональных возможностей его мышц в текущем состоянии. Способ позволяет формировать обучающие и контрольные выборки дескрипторов, образцы в которых были получены от испытуемых с различными значениями предельной мышечной усталости на основе индивидуальных шкал мышечной усталости, и создавать модели машинного обучения, позволяющие формировать универсальные шкалы мышечной усталости, инвариантные к физическим возможностям испытуемого, и осуществлять управление процедурами реабилитации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки мышечной усталости на основе контроля паттернов синергии и устройство для его осуществления | 2021 |
|
RU2766764C1 |
| Способ дешифрации электромиосигналов и устройство для его реализации | 2020 |
|
RU2762775C1 |
| СПОСОБ ИССЛЕДОВАНИЯ СИНХРОНИЗМА КАРДИОРЕСПИРАТОРНОЙ СИСТЕМЫ | 2023 |
|
RU2829276C1 |
| Способ реабилитации пациентов с нарушением двигательной активности с использованием персонифицированного контента клипов виртуальной реальности | 2024 |
|
RU2830938C1 |
| Способ классификации двигательной активности человека | 2020 |
|
RU2751816C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ, ПЕРЕНЕСШИХ ИНСУЛЬТ | 2013 |
|
RU2523349C1 |
| Способ восстановления двигательной функции конечности | 2019 |
|
RU2703838C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ С ПОМОЩЬЮ ЭЛЕКТРОМИОГРАФИЧЕСКОГО УСТРОЙСТВА СЧИТЫВАНИЯ | 2017 |
|
RU2683859C1 |
| Способ реабилитации пациентов с неврологическими нарушениями после ишемического инсульта | 2023 |
|
RU2829423C2 |
| СПОСОБ ИНДИВИДУАЛЬНО-ФИЗИЧЕСКОЙ РЕАБИЛИТАЦИИ И КОНТРОЛЯ ЕЕ ЭФФЕКТИВНОСТИ ПРИ ОСТЕОХОНДРОЗЕ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2003 |
|
RU2232003C1 |

Данное техническое решение относится к области медицинских реабилитирующих устройств и робототехники, в частности к способам и системам для управления экзоскелетом при реабилитации людей с заболеваниями, приводящими к нарушениям опорно-двигательного аппарата и костно-мышечной системы, а также для использования в качестве человеко-машинных интерфейсов промышленных экзоскелетов. Технической задачей предлагаемого способа является снижение ошибки классификации уровней мышечной усталости посредством использования в качестве классификаторов моделей машинного обучения. Поставленная задача достигается тем, что в известном способе оценки мышечной усталости, заключающемся в получении sEMG сигнала с мышцы, принимающей участие в тестовой функциональной пробе или технологической операции, сегментации его по определенному правилу, позволяющему сформировать временную последовательность сегментов, определении полученных этих сегментов для последующего исследования их энергетической эволюции и построения дескрипторов для классификатора мышечной усталости, для стратификации мышечной усталости в текущий период функциональной пробы исследуют вейвлет-плоскость сегмента sEMG, соответствующего интервалу двигательной активности в текущем периоде функциональной пробы, и на основе ее анализа формируют два вектора дескрипторов, первый из которых определяется путем вычисления глобальной энтропии вейвлетов в строках (масштабах) вейвлет-плоскости, а второй определяется путем вычисления глобальной энтропии вейвлетов в столбцах вейвлет-плоскости, при этом во второй вектор дескрипторов включают только компоненты, которые превышают пороговое значение, установленное таким образом, чтобы оно принимало максимальное значение порога, не приводящее к пропуску индексов внутри оставшейся последовательности компонентов вектора. 2 з.п. ф-лы, 10 ил.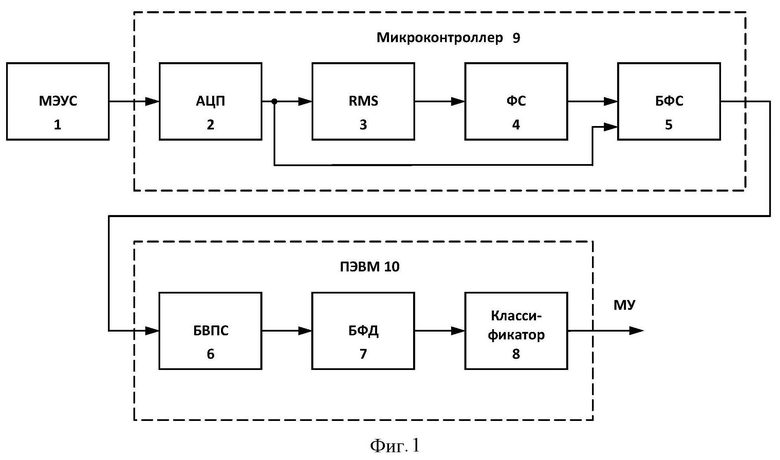
1. Способ классификации мышечной усталости на основе анализа вейвлет-преобразования сегментов двигательной активности электромиосигнала, заключающийся в получении электромиосигнала с мышц, принимающих участие в тестовой функциональной пробе или технологической операции, сегментации его на основе пороговой обработки, посредством чего получают временную последовательность сегментов, определении вейвлет-преобразования этих сегментов для последующего исследования их энергетической эволюции и построения дескрипторов для моделей машинного обучения, предназначенных для классификации мышечной усталости, отличающийся тем, что на основе вейвлет-преобразования сегмента электромиосигнала, соответствующего интервалу двигательной активности в текущем периоде функциональной пробы, формируют два вектора дескрипторов, первый из которых определяется путем вычисления общей энтропии вейвлетов в строках (масштабах) вейвлет-плоскости, а второй определяется путем вычисления общей энтропии вейвлетов в столбцах вейвлет-плоскости, при этом во второй вектор дескрипторов включают только компоненты, которые превышают пороговое значение, установленное таким образом, чтобы оно не приводило к пропуску индексов внутри оставшейся последовательности компонентов вектора, а после формирования двух векторов дескрипторов их используют в модели машинного обучения для классификации степени мышечной усталости в текущий момент функциональной пробы.
2. Способ по п. 1, отличающийся тем, что для формирования дата сет для модели машинного обучения для каждого испытуемого в экспериментальной группе определяется индивидуальная шкала мышечной усталости путем двухэтапного эксперимента с тестовой нагрузкой, на первом этапе которого устанавливается предельная мышечная усталость, определяемая показателем нагрузка-время, при равном шаге изменения силы на шкале динамометра и равном времени удержания фиксированного значения показания динамометра для всех пациентов, а на втором этапе, который осуществляется после выполнения первого этапа всеми пациентами экспериментальной группы, определяется среднее время достижения предельной мышечной усталости в экспериментальной группе, после чего устанавливается тестовая нагрузка для каждого пациента таким образом, чтобы мышечная усталость для каждого пациента достигла своего предельного значения за установленное среднее время, а деления, получаемые на индивидуальной шкале, используются в качестве инвариантного к физическим возможностям испытуемых показателя Цель в обучающей выборке для построения модели машинного обучения, формирующей универсальную шкалу мышечной усталости.
3. Способ по пп. 1 и 2, отличающийся тем, что для управления процедурами реабилитации нарушений двигательной активности используется универсальная шкала мышечной усталости, содержащая три метки, соответствующие четырем классам мышечной усталости, при этом если уровень мышечной усталости соответствует уровню 1…30% на универсальной шкале, то полагают, что это класс «0», и решение по этому классу не принимается, а процедура реабилитации выполняется в соответствии с программой реабилитации, если показатель мышечной усталости соответствует уровню 31…50% на универсальной шкале, что соответствует промежутку между первой и второй метками, то векторам дескрипторов будет соответствовать «1» класс уровня усталости, что требует повышенного внимания к пациенту, если же показатель мышечной усталости соответствует уровню 51…85%, то есть находится между второй и третьей метками (класс «2»), то электрическая стимуляция должна быть остановлена, а в случае использования экзоскелета должны быть включены серводвигатели для создания соответствующих ассистирующих моментов или ассистирующие моменты должны быть увеличены, если же уровень усталости превысил величину 85% от универсальной шкалы, то процедура реабилитации должна быть прекращена.
| CN 118266951 A, 02.07.2024 | |||
| IN 202011033902 A, 09.10.2020 | |||
| US 2024005150 A1, 04.01.2024 | |||
| CN 114190956 A, 18.03.2022 | |||
| CN 113975629 A, 28.01.2022 | |||
| Способ оценки мышечной усталости на основе контроля паттернов синергии и устройство для его осуществления | 2021 |
|
RU2766764C1 |

