Данное техническое решение относится к области медицинских реабилитирующих устройств и робототехники, в частности, к способам и системам для управления экзоскелетом при реабилитации людей с заболеваниями, приводящими к нарушениям опорно-двигательного аппарата и костно-мышечной системы, а также для использования в качестве человеко-машинных интерфейсов промышленных экзоскелетов.
Экзоскелеты используются, как в биотехнических системах реабилитационного типа для компенсации недостатка подвижности лиц с ограниченными возможностями здоровья (ОВЗ), так и в качестве промышленных роботов, где экзоскелеты выполняют роль ассистента. Объединяет эти две, казалось бы, совсем не связанные между собой области применения экзоскелетов, то обстоятельство, что для эффективной реабилитации или для эффективной помощи рабочему в выполнении технологических операций, автоматизировать которые затруднительно, необходимо определить тот момент, когда сам оператор экзоскелета не справляется с текущей физической нагрузкой, то есть ему необходима помощь в виде экзогенного момента. Такая помощь может быть оказана в момент наступления мышечной слабости, под которой понимается снижение мышечной силы.
Таким образом, необходимо точно определить время появления снижения мышечной силы, а также роль экзоскелета в компенсации этой мышечной слабости, то есть вклад серводвигателей экзоскелета в процесс выполнения технологической операции или терапевтической процедуры.
В медицинской практике мышечную силу оценивают при помощи шкал. В настоящее время повсеместное распространение получила шкала Совета по медицинским исследованиям Великобритании (MRC):
- 0 - отсутствие видимых сокращений мышц;
- 1 - имеются видимые сокращения мышц, но движения в конечности отсутствуют;
- 2 - наблюдаются движения конечности, но без преодоления силы тяжести;
- 3 - возможны движения в конечности, способные преодолеть силу тяжести, но не сопротивление, оказываемое врачом;
- 4 - движения, способные, по меньшей мере, частично преодолеть сопротивление, оказываемое врачом;
-5 - нормальная мышечная сила.
Затруднения в использовании этой и аналогичных шкал обусловлены значительным диапазоном величин мышечной силы между оценками в 4 и 5 баллов.
Более ясное представление о соотношении мышечной слабости и двигательных нарушений дают функциональные пробы. Пациента просят выполнить то или иное движение, выявляющее определенный двигательный дефект, который можно оценить количественно (например, по числу приседаний или шагов по лестнице, которые пациент в состоянии совершить). При попытке встать с корточек или поставить ногу на стул определяют силу мышц бедра; ходьба на пятках и носках определяет силу мышц голени и стопы. Отталкивание руками при вставании со стула указывает на слабость четырехглавой мышцы бедра. Раскачивающие движения туловищем для перемещения рук в другую позицию свидетельствуют о парезе мышц плечевого пояса. Силу кистей рук можно полуколичественно определить ручным динамометром или по степени сжатия пациентом надутой манжеты тонометра. Пациенты со слабостью мышц тазового пояса вынуждены вставать из положения лежа в определенной последовательности: сначала они переворачиваются со спины на живот, затем становятся на колени и постепенно выпрямляются, «карабкаясь» руками по бедрам (симптом Гувера).
Известен способ оценки мышечного утомления по 10-балльной шкале Борга [Borg G.A.  Perceived Exertion and Pain Scales. - Champaign: Human Kinetics, 1998. - 120 р.]. Способ заключается в размещении испытуемого в кресле с поддержкой спины, фиксации предплечья правой руки на подлокотнике (угол в локтевом суставе между осями плеча и предплечья равен 90 град), закреплении кистевого динамометра на экспериментальном столе на уровне локтевого сустава правой руки испытуемого, и удерживании испытуемым рабочей части динамометра кистью при неизменяемом положении руки в течение эксперимента. При этом динамометр соединен с компьютером, так чтобы на его экране в реальном времени в виде кривой отражалась прилагаемая сила. Сила сжатия динамометра измерялась в условных единицах (одна условная единица соответствует 653 Ньютонам). В начале и в конце эксперимента регистрировалась величина максимального произвольного сокращения (МПС), которая представляла собой значение максимального изометрического сжатия динамометра, усредненного за 5 секунд. В начале и в конце эксперимента оценивался уровень субъективного ощущения утомления (СОУ). Испытуемым предлагали отметить величину мышечной усталости предплечья, возможные значения варьировали от 1 - "совершенно не чувствую" до 10 - "непереносимо" по 10-бальной шкале.
Perceived Exertion and Pain Scales. - Champaign: Human Kinetics, 1998. - 120 р.]. Способ заключается в размещении испытуемого в кресле с поддержкой спины, фиксации предплечья правой руки на подлокотнике (угол в локтевом суставе между осями плеча и предплечья равен 90 град), закреплении кистевого динамометра на экспериментальном столе на уровне локтевого сустава правой руки испытуемого, и удерживании испытуемым рабочей части динамометра кистью при неизменяемом положении руки в течение эксперимента. При этом динамометр соединен с компьютером, так чтобы на его экране в реальном времени в виде кривой отражалась прилагаемая сила. Сила сжатия динамометра измерялась в условных единицах (одна условная единица соответствует 653 Ньютонам). В начале и в конце эксперимента регистрировалась величина максимального произвольного сокращения (МПС), которая представляла собой значение максимального изометрического сжатия динамометра, усредненного за 5 секунд. В начале и в конце эксперимента оценивался уровень субъективного ощущения утомления (СОУ). Испытуемым предлагали отметить величину мышечной усталости предплечья, возможные значения варьировали от 1 - "совершенно не чувствую" до 10 - "непереносимо" по 10-бальной шкале.
Недостатком способа является отсутствие возможности контроля величины мышечного утомления и момента наступления критического утомления в процессе выполнения тестовой нагрузки.
В качестве прототипа изобретения по способу выбран способ контроля мышечной усталости на основе анализа паттернов синергии [Clinical Model to the Analysis of Synergy Pattern Changes of Back Muscles and its Relationship with the Occurrence of Fatigue / Armin HakKak Moghaddam Torbati, Ehsan Tahami and Hamid Reza Kobravi // The Open Bioinformatics Journal, 2018, 11, 53-60. DOI: 10.2174/1875036201811010052]. Мышечная синергия - это согласованная локальная и временная активность множества мышц, которые связаны друг с другом, чтобы поддерживать высокую производительность выполнения тестового движения или технологической операции. Один из основополагающих принципов динамической системы - самоорганизация. Иными словами, когда система объединяет отдельные части управляющего процесса в целое, ее элементы совместно ведут себя упорядоченным образом. Эта система может достигать скоординированных действий без необходимости выдачи инструкций вышестоящим центром. Комбинация этого принципа с теорией моторного контроля доказывает, что движение может возникать в результате взаимодействия элементов, без каких-либо конкретных команд или моторных программ в нервной системе. Еще одна особенность динамической системы - нелинейное поведение. То есть, когда постепенно изменяемый параметр системы достигает критического значения, поведение системы мгновенно меняется. Сущность способа, построенного на этом принципе, состоит в том, что на основе анализа электромиограмм (ЭМГ), снятых с различных мышц, поддерживающих выполнение одного и того же тестового движения, формировались дескрипторы для обучаемого классификатора, который дискриминировал утомление на три уровня. В обучающих выборках, формируемых на основе этих дескрипторов, выделялись три кластера усталости мышц в 15-ти минутном тестовом задании. Уровни усталости мышц определялись на основе экспериментальных исследований, которые фиксировали изменения паттернов ЭМГ во времени. Экспериментально было установлено, что паттерны ЭМГ мышц внезапно изменялись на девяностой и на шестисотой секунде выполнения тестовой мышечной нагрузки, что и являлось границами дискриминируемых кластеров.
Основным недостатком прототипа является то, что при формировании кластеров мышечного утомления используют временной подход, тогда как в реабилитационных робототехнических системах и в промышленных роботах необходимо формировать кластеры утомления по соотношению функциональных возможностей оператора и величине текущей мышечной нагрузки. Таким образом, для управления экзоскелетом, работающим в комбинированном режиме, требуется в реальном времени определить реперный сигнал, который свидетельствует о превышении текущей нагрузки физическим возможностям оператора.
В качестве прототипом изобретения по устройству выбрано устройство для дешифрации электромиосигналов, содержащее последовательно соединенные миоэлектронное устройство считывания, блок обработки ЭМГ-сигнала; бортовой процессор и контроллер серводвигателей. Миоэлектронное устройство считывания, содержит последовательно соединенные блок электродов, усилитель биопотенциалов, микроЭВМ, первый адаптер BlueTooth, который посредством радиоэфира соединен со вторым адаптером BlueTooth, который подключен к блоку обработки сигналов (ЭВМ). В блок электродов входят три электрода. Они снимают биопотенциалы с поверхности кожи. Усилитель биопотенциалов усиливает ЭМГ сигнал и очищает его. Усилитель биопотенциалов построен по дифференциальной схеме, позволяющей избавиться от синфазных помех. Также внутри усилителя есть фильтры для фильтрации противофазных помех. Усилитель биопотенциалов реализован на одной микросхеме AD8232. После прохождения сигнала через фильтры усилителя биопотенциалов он оцифровывается и отформатируется согласно спецификациям адаптера BlueTooth для последующей передачи по радиоканалу. Эту работу выполняет микроЭВМ (микроконтроллер), который благодаря встроенному модулю АЦП переводит его из аналоговой формы в цифровую. Цифровой сигнал от микроЭВМ формируется в кадры и поступает в адаптер Bluetooth для его последующей передачи по радиоканалу согласно протоколам Bluetooth. Радиоканал обеспечивает мобильность устройства и его электрическую безопасность. Далее сигнал поступает во второй адаптер Bluetooth на стороне ЭВМ, после чего непосредственно в ЭВМ. ЭВМ регистрирует сигналы, декодирует их, распознает данные и визуализирует их на экране. [Трифонов, А.А. Биотехническая система с виртуальной реальностью в реабилитационных комплексах с искусственными обратными связями / А.А. Трифонов, Е.В. Петрунина, С.А. Филист, А.А. Кузьмин, В.В. Жилин // Известия Юго-Западного государственного университета. Серия: Управление, вычислительная техника, информатика. Медицинское приборостроение. 2019; 9(4). - С. 49-66].
Недостатком устройства является отсутствие возможности определить паттерны синергии мышц.
Технической задачей предлагаемых способа и устройства является снижение ошибки детектирования уровней мышечной усталости.
Поставленная задача достигается тем, что в известном способе оценки мышечной усталости, заключающимся в получении, по меньшей мере, двух ЭМГ сигналов оператора экзоскелета с мышц, принимающих участие в тестовой функциональной пробе или технологической операции, и обработки, по меньшей мере, двух ЭМГ сигналов оператора экзоскелета, паттерны мышечной синергии выделяются посредством образования в каждом канале ЭМГ частотного и амплитудного подканалов и определении показателей корреляции сигналов в частотных подканалах всех каналов ЭМГ и показателя корреляции амплитудных подканалов всех каналов ЭМГ. Эти два показателя корреляции рассматриваются как паттерны синергии контролируемых мышц. После определения паттернов синергии осуществляют их классификацию посредством нечеткой логики принятия решений. Классификацию осуществляют посредством блока нечеткого логического вывода, который принимает решение о включении соответствующих серводвигателей экзоскелета с целью оказания помощи оператору при выполнении тестовой функциональной пробы или заданной технологической операции.
Устройство для осуществления способа оценки мышечной усталости на основе контроля паттернов синергии, содержит, по меньшей мере, два миоэлектронных устройства считывания, последовательно соединенные микроЭВМ, аналоговые входы которой подключены к выходам миоэлектронных устройств считывания, первый адаптер Bluetooth, второй адаптер Bluetooth, ЭВМ и бортовой процессор. Миоэлектронное устройство считывания включает последовательно соединенные блок электродов, усилитель биопотнциалов и полосно пропускающий фильтр, к выходу которого для формирования паттернов синергии подключены последовательно соединенные точный выпрямитель, компаратор, одновибратор и первый фильтр нижних частот, а также второй фильтр нижних частот, входом подключенный к выходу точного выпрямителя. Для классификации паттернов мышечной синергии используется блок нечеткого логического вывода, реализованный на программном уровне в ЭВМ 6, содержащий последовательно соединенные блок корреляционных детекторов, блок фуззификаторов, базу нечетких решающих правил и дефаззификатор, выходом подключенный к бортовому процессору 7 экзоскелета. Блок корреляционных детекторов состоит из двух корреляционных детекторов, содержащих последовательно соединенные умножитель и фильтр скользящего среднего, умножитель первого корреляционного детектора подключен к выходам первых фильтров нижних частот миоэлектроных устройств считывания, а второго - к выходам вторых фильтров нижних частот миоэлектронных устройств считывания, а выходы фильтров скользящего среднего корреляционных детекторов подключены к соответствующим входам фуззификаторов блока фуззификаторов.
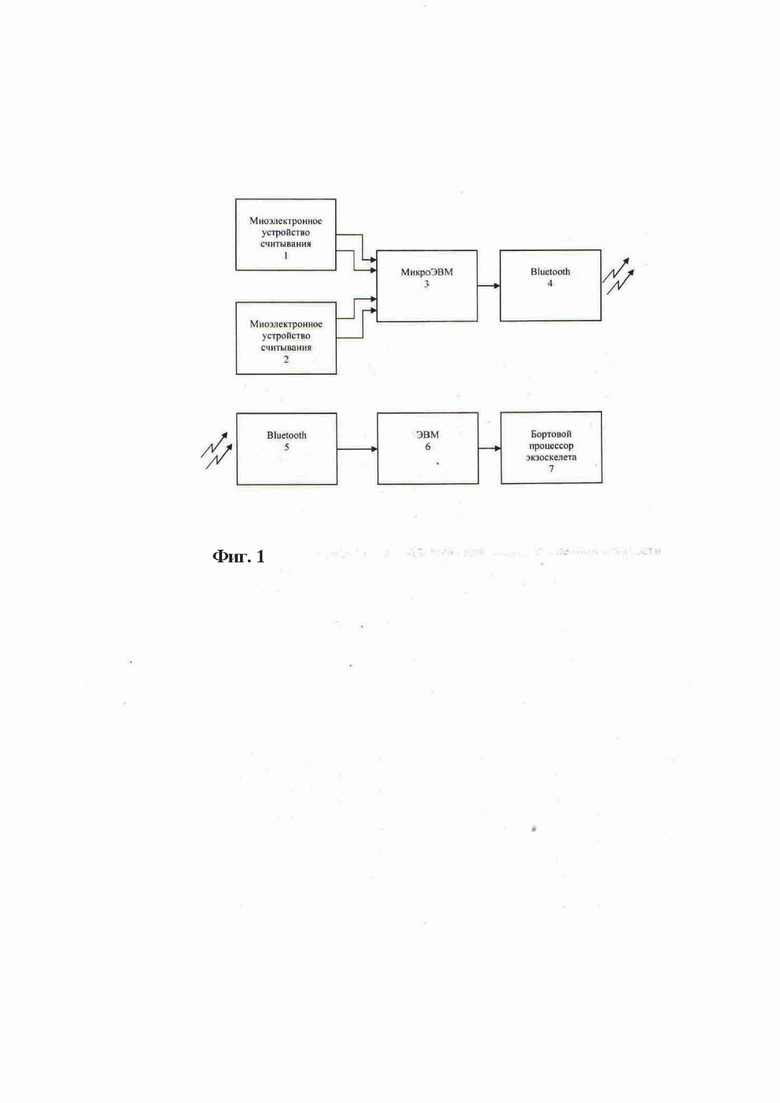
На фиг. 1 представлена структурная схема устройства, осуществляющего предлагаемый способ.
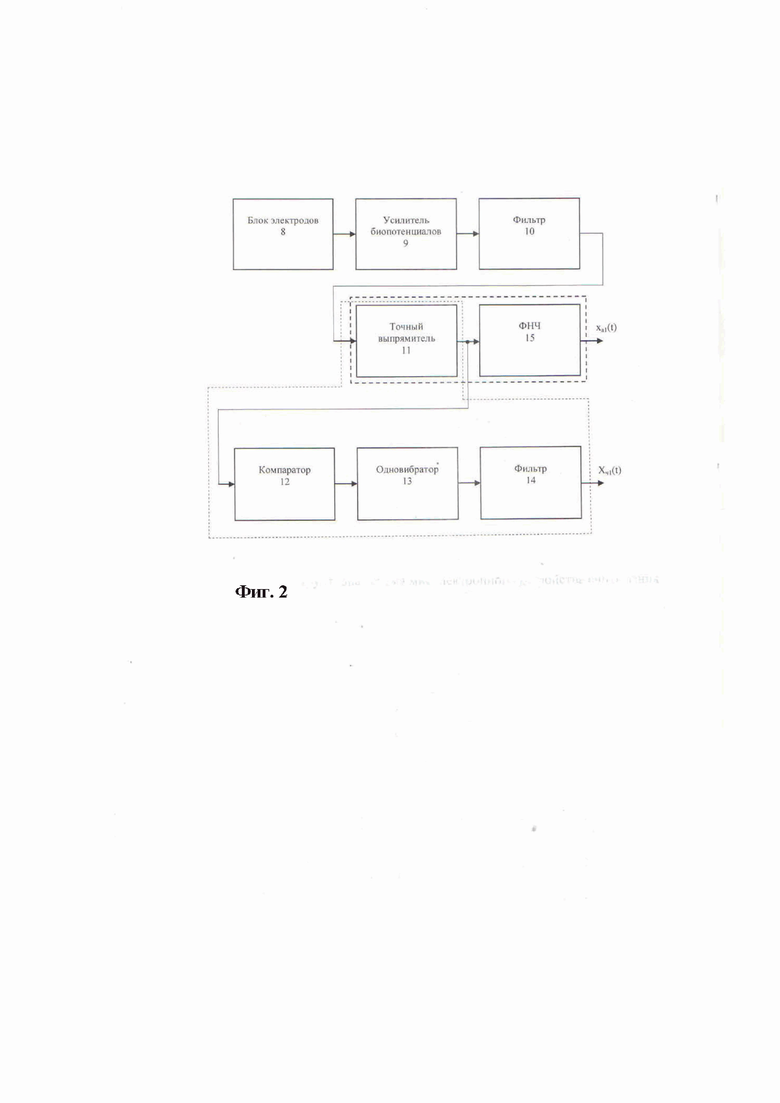
На фиг. 2 представлена структурная схема миоэлектронного устройства считывания на примере одного канала ЭМГ.
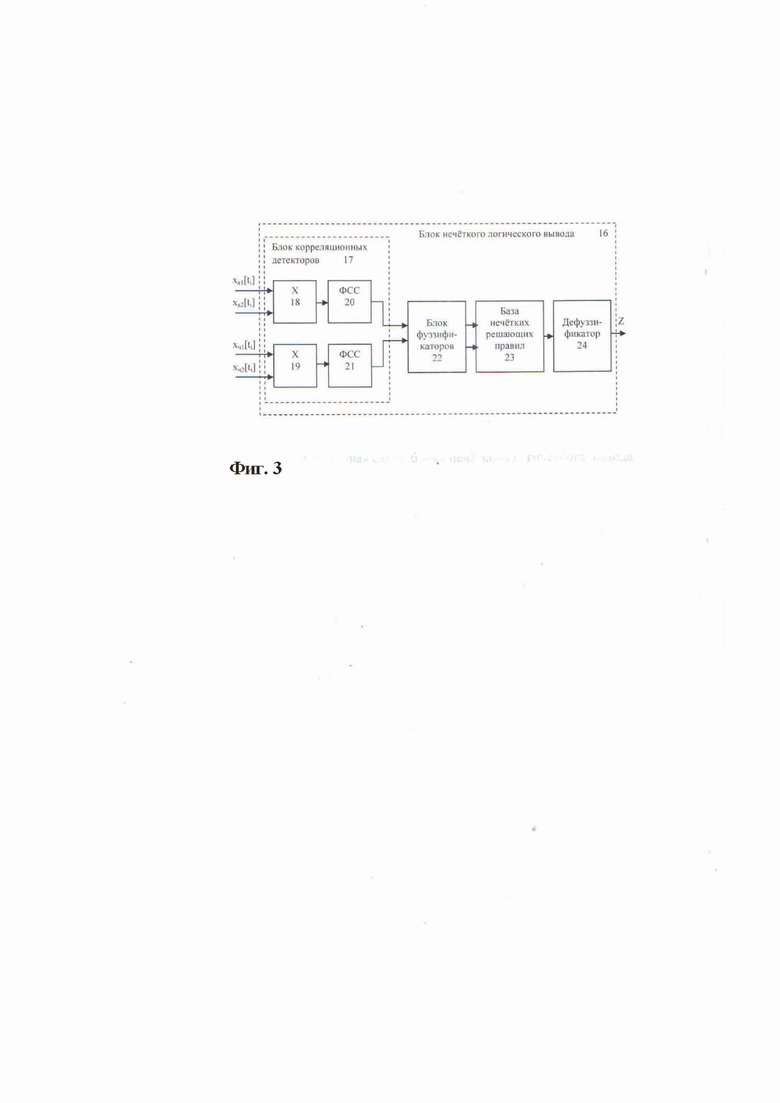
На фиг. 3 представлена структурная схема блока нечеткого логического вывода.
На фиг. 4 представлена фотография расположения электродов на двуглавой мышцы плеча и на плечелучевой мышцы для организации двухканальной записи ЭМГ.
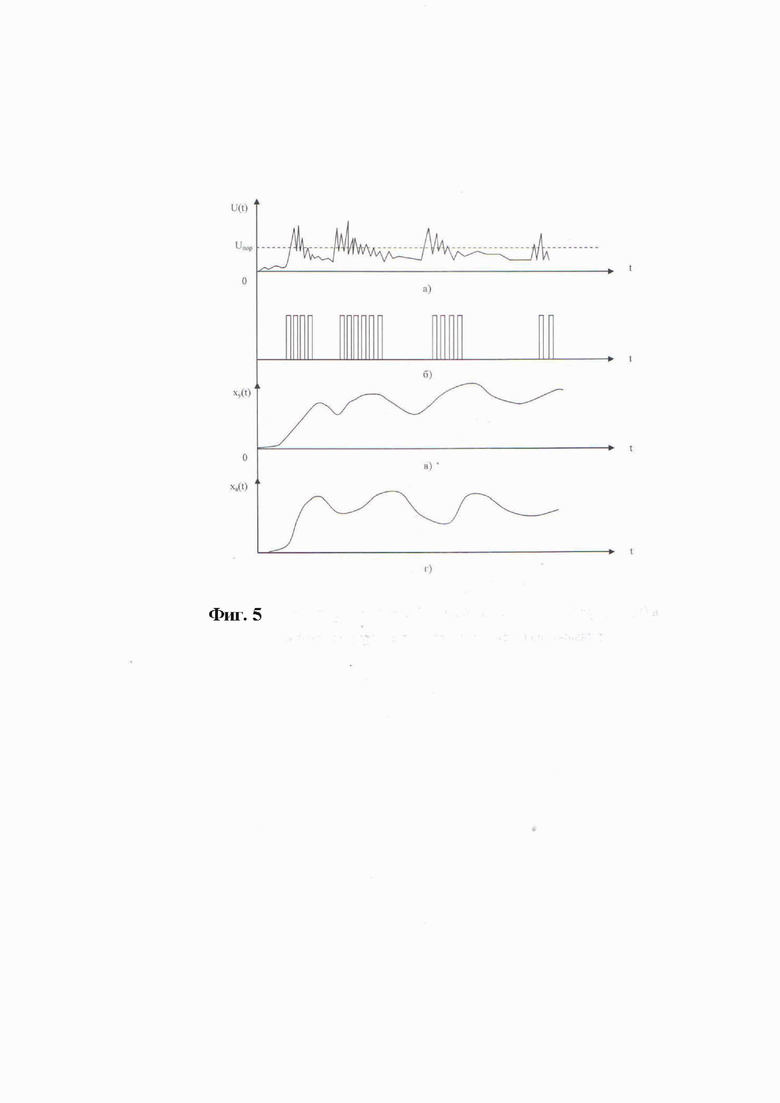
На фиг. 5 представлены временные диаграммы формирования амплитудного и частотного подканалов в миоэлектронном устройстве считывания.
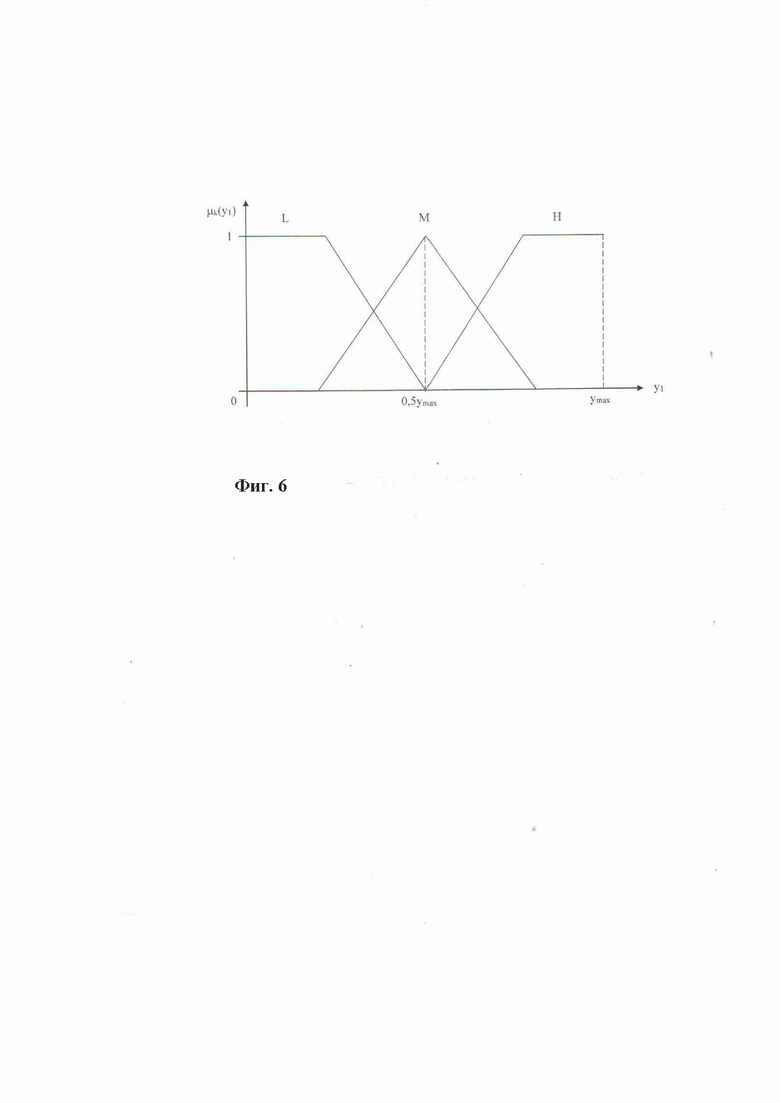
На фиг. 6 представлены функции принадлежности для первого паттерна синергии.
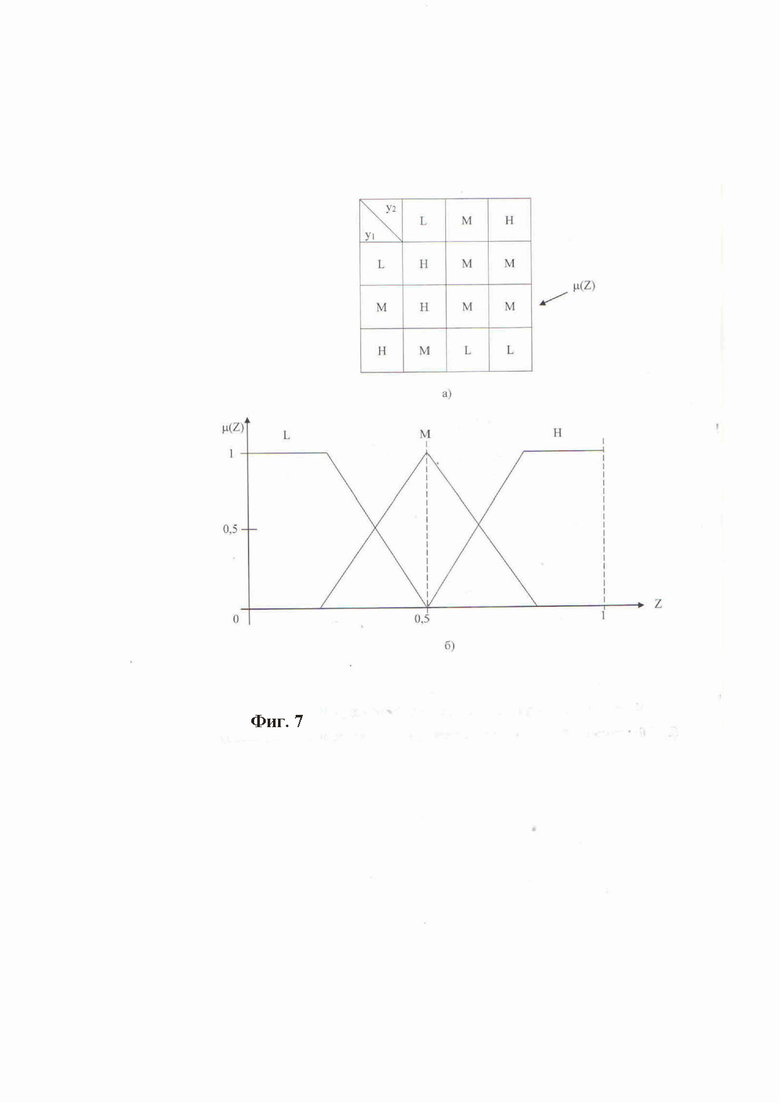
На фиг. 7 представлена таблица формирования правил нечеткой продукции и сооьветствующие ей функции принадлежности показателя синергии.
Устройство фиг. 1 состоит из, не менее двух, миоэлектронных устройств считывания 1 и 2, и последовательно соединенных микроЭВМ 3, аналоговыми входами подключенной к выходам миоэлектронных устройств считывания 1 и 2, адаптера Bluetooth 4, адаптера Bluetooth 5, ЭВМ 6 и бортового процессора экзоскелета 7.
Миоэлектронное устройство считывания фиг. 2 состоит из последовательно соединенных блока электродов 8, усилителя биопотнциалов 9, полосно пропускающего фильтра 10, точного выпрямителя 11, компаратора 12, одновибратора 13 и фильтра нижних частот 14, выход точного выпрямителя 11 подключен к входу фильтра нижних частот 15. В результате такого включения блоков блоки 11 и 15 осуществляют амплитудную демодуляцию ЭМГ, а блоки 11, 12, 13 и 14 - частотную демодуляцию ЭМГ.
Блок нечеткого логического вывода 16, структурная схема которого показана на фиг. 3, реализуется программно в ЭВМ 6 и своими входами подключен к цифровым выходам микроЭВМ 3. Он состоит из последовательно соединенных блока корреляционных детекторов 17, входами соединенного посредством микроЭВМ 3, Bluetooth 4 и Bluetooth 5 с выходами миоэлектронных устройств 1 и 2, блока фуззификаторов 18, базы нечетких решающих правил 19 и деффузификатора 20, выход которого предназначен для подключения к входу бортового процессора 7 экзоскелета.
Сущность способа заключается в получении двух паттернов мышечной синергии и их анализа, с последующей передачей результатов анализа в бортовой процессор экзоскелета. Электроды блока электродов 8 миоэлектронных устройств считывания 1 и 2 (фиг. 2) устанавливаются на мышцы-агонисты и мышцы-синергисты, или на мышцы антогонисты и мышцы-синергисты. Например, сгибание локтевого сустава осуществляют двуглавая мышца плеча и плечевая мышца (агонисты). При этом плечелучевая мышца и круглый пронатор выполняют поддерживающую функцию (синергисты). Эти мышцы, совершая одновременную работу, обеспечивают сгибание локтевого сустава, что является особенно важным, если сустав находится под нагрузкой, то есть рука сгибается с каким то грузом. На фиг. 4 представлена фотография расположения электродов на двуглавой мышцы плеча и на плечелучевой мышцы для организации двухканальной записи ЭМГ. Сигналы в двух ЭМГ каналах усиливаются усилителями биопотенциалов (блок 2 фиг. 2) миоэлектронных устройств считывания 1 и 2 фиг. 1. Фильтры 10 выделяют значимые частоты ЭМГ сигнала: 10…500 Гц. Сигналы с фильтра 10 выпрямляются точным выпрямителем 11, посредством которого в миоэлектронном устройстве считывания образуются два подканала ЭМГ. Первый подканал образуется в результате амплитудного детектирования ЭМГ (блоки 11 и 15), а второй подканал в результате частотного детектирования ЭМГ (блоки 11, 12, 13 и 14). Для фильтров нижних частот 14 и 15 частота среза выбирается из условия 3⋅τmax≤100 млс, где τmax максимальная постоянная времени фильтра нижних частот, 100 млс - сегмент времени, соответствующий формированию одной моторной команды в паттерне ЭМГ.
Формирование сигналов в подканалах миоэлектронных устройств считывания иллюстрируют временные диаграммы, представленные на фиг. 5. Выпрямленный сигнал ЭМГ (эпюра фиг. 5а) поступает на вход компаратора 12 и фильтра нижних часто 15. Перепады напряжения на компараторе, которые имеют место всякий раз, когда напряжение на выходе точного выпрямителя 11 превысит пороговое напряжение компаратора 12, запускают одновибратор 13, который выдает в ответ на каждый перепад импульс калиброванной длительности и амплитуды. Эти импульсы (эпюра фиг. 5б) поступают на вход фильтра нижних частот 14, выход которого формирует частотный подканал хч(t) (эпюра фиг. 5в). Напряжение с точного выпрямителя 11 поступает так же на фильтр нижних частот 15, выход которого формирует амплитудный подканал ха(t) (эпюра фиг. 5г).
В результате амплитудного и частотного детектирования канальных ЭМГ в блоках миоэлектронного считывания 1 и 2, образуются четыре подканала, сигналы в которых оцифровываются в микроЭВМ 3 и через Bluetooth 4 и 5 передаются в ЭВМ 6, в которой осуществляется их программная обработка в блоке нечеткого логического вывода 16, структурно-функциональная схема которого представлена на фиг. 3.
Цифровые сигналы xa1[ti] и ха2[ti] с подканалов амплитудных детекторов миоэлектронных устройств считывания 1 и 2 и цифровые сигналы хч1[ti] и хч2[ti] с подканалов частотных детекторов миоэлектронных устройств считывания 1 и 2 поступают на соответствующие входы блока корреляционных детекторов 17 блока нечеткого логического вывода 16, включающего умножители 18 и 19 и фильтры скользящего среднего 20 и 21. В результате на выходе блока корреляционных детекторов формируются два паттерна сигналов синергии


где N - ширина окна фильтров скользящего среднего 20, 21, n - текущий отсчет времени, i - апостериорные отсчеты времени.
Два паттерна сигналов синергии поступают на вход фуззификатора, где они преобразуются, согласно нелинейным преобразованиям, представленным на фиг. 6. Число преобразований определяется числом нечетких термов для паттернов синергии. На фиг. 6 паттерны синергии представлены тремя нечеткими термами: L - низкий уровень корреляции синергистов, М - средний уровень корреляции синергистов и Н - высокий уровень корреляции синергистов. При низком или среднем уровне корреляции синергистов необходимо сформировать экзогенный момент на соответствующий сустав, синергисты которого подключены к соответствующим каналам ЭМГ. Для второго синергетического паттерна строятся аналогичные функции принадлежности.
Нечеткие термы μ(y1) и μ(у2), полученные согласно нелинейным преобразованиям (см. фиг. 6) поступают в базу нечетких решающих правил. В базе нечетких решающих правил сформированы предпосылки и следствия. Предпосылки обычно объединяются по логической функции И, в нечеткой логике этой функции соответствует функция MIN. При наличии трех термов и двух лингвистических переменных следствия в решающих правилах могут быть сформированы посредством таблицы, строки и столбцы которой соответствуют используемым термам, а в ячейках таблицы записывается терм выходной переменной Z. Если положить, что у выходной лингвистической переменной тоже три терма, то получим таблицу, представленную на фиг. 7а. Нумерации столбцов и строк этой таблицы формируют антецеденты решающих правил, а в ячейках эксперты формируют соответствующие консеквенты. Для перехода от нечеткой переменной к четким значениям Z, которые передаются из ЭВМ 6 в бортовой процессор 7 экзоскелета, осуществляется ее дефуззификации в соответствии с функциями принадлежности фиг. 7б. Полученная величина определяет синергетику мышц оператора экзоскелета и на основе ее анализа бортовой процессор 7 экзоскелета формирует соответствующие управляющие токи на серводвигатели экзоскелета.
Таким образом, предлагаемый способ позволяет управлять механическими моментами на серводвигателях экзоскелета адекватно тестовой мышечной нагрузки и функционального состояния мышц оператора. Способ позволяет осуществлять индивидуальную настройку блока нечеткого логического вывода и оптимизировать комбинированный режим работы экзоскелета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КЛАССИФИКАЦИИ МЫШЕЧНОЙ УСТАЛОСТИ НА ОСНОВЕ АНАЛИЗА ВЕЙВЛЕТ-ПРЕОБРАЗОВАНИЯ СЕГМЕНТОВ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ЭЛЕКТРОМИОСИГНАЛА | 2024 |
|
RU2839398C1 |
| Способ дешифрации электромиосигналов и устройство для его реализации | 2020 |
|
RU2762775C1 |
| Комплекс для бионического управления техническими устройствами | 2020 |
|
RU2748428C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ С ПОМОЩЬЮ ЭЛЕКТРОМИОГРАФИЧЕСКОГО УСТРОЙСТВА СЧИТЫВАНИЯ | 2017 |
|
RU2683859C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2016 |
|
RU2627818C1 |
| Способ и комплекс бионического управления техническими устройствами | 2020 |
|
RU2756162C1 |
| АППАРАТ ДЛЯ ПРОВЕДЕНИЯ ТРЕНИРОВКИ С ЭЛЕКТРОМИОГРАФИЧЕСКОЙ И ГНАТОДИНАМОМЕТРИЧЕСКОЙ БИОЛОГИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2023 |
|
RU2819983C1 |
| Устройство управления нейрореабилитационным тренажером верхней конечности человека | 2017 |
|
RU2644294C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНОЙ БИОНИЧЕСКОЙ КОНЕЧНОСТЬЮ | 2016 |
|
RU2635632C1 |

Группа изобретений относится к медицине, а именно к реабилитирующим устройствам и робототехнике, в частности, к способам и системам для управления экзоскелетом при реабилитации людей с заболеваниями, приводящими к нарушениям опорно-двигательного аппарата и костно-мышечной системы, а также для использования в качестве человеко-машинных интерфейсов промышленных экзоскелетов. Способ оценки мышечной усталости на основе контроля паттернов синергии заключается в получении ЭМГ сигналов оператора экзоскелета с мышц-синергистов, принимающих участие в тестовой функциональной пробе или технологической операции. Кроме того, получают паттерны мышечной синергии с последующей их классификацией для формирования управляющих команд серводвигателей экзоскелета. Паттерны мышечной синергии формируются посредством образования в каждом канале ЭМГ частотного и амплитудного подканалов и определения показателя корреляции сигналов в частотных подканалах и показателя корреляции сигналов в амплитудных подканалах. Осуществляют классификацию полученных паттернов посредством блока нечеткого логического вывода. На основе результатов классификации принимается решение о включении соответствующих серводвигателей экзоскелета с целью оказания помощи оператору при выполнении тестовой функциональной пробы или заданной технологической операции. Устройство для оценки мышечной усталости содержит миоэлектронные устройства считывания, последовательно соединенные микроЭВМ, первый и второй адаптеры Bluetooth, ЭВМ и бортовой процессор. Устройства считывания включают последовательно соединенные блок электродов, усилитель биопотенциалов и полосно пропускающий фильтр, а также последовательно соединенные точный выпрямитель, компаратор, одновибратор, первый и второй фильтры нижних частот. Блок нечеткого логического вывода содержит последовательно соединенные блок корреляционных детекторов, блок фуззификаторов, базу нечетких решающих правил и дефуззификатор, выходом подключенный к бортовому процессору экзоскелета. Достигается снижение ошибки детектирования уровней мышечной усталости. 2 н.п. ф-лы, 7 ил.
1. Способ оценки мышечной усталости на основе контроля паттернов синергии, осуществляющийся с помощью устройства по п. 2 и заключающийся в получении, по меньшей мере, двух ЭМГ сигналов оператора экзоскелета с мышц-синергистов, принимающих участие в тестовой функциональной пробе или технологической операции, и получении, по меньшей мере, двух паттернов мышечной синергии и последующей их классификации для формирования управляющих команд серводвигателей экзоскелета, отличающийся тем, что паттерны мышечной синергии формируются посредством образования в каждом канале ЭМГ частотного и амплитудного подканалов и определения показателя корреляции сигналов в частотных подканалах всех каналов ЭМГ и показателя корреляции сигналов в амплитудных подканалах всех каналов ЭМГ, и классификацией полученных паттернов синергии посредством блока нечеткого логического вывода, на основе результатов которой принимается решение о включении соответствующих серводвигателей экзоскелета с целью оказания помощи оператору при выполнении тестовой функциональной пробы или заданной технологической операции.
2. Устройство для оценки мышечной усталости на основе контроля паттернов синергии, содержащее, по меньшей мере, два миоэлектронных устройства считывания, включающие последовательно соединенные блок электродов, усилитель биопотенциалов и полосно пропускающий фильтр, и последовательно соединенные микроЭВМ, аналоговые входы которой подключены к выходам миоэлектронного устройства считывания, первый адаптер Bluetooth, второй адаптер Bluetooth, ЭВМ и бортовой процессор, отличающееся тем, что для формирования паттернов синергии в миоэлектронное устройство считывания дополнительно введены последовательно соединенные точный выпрямитель, входом подключенный к выходу полосно пропускающего фильтра, компаратор, одновибратор и первый фильтр нижних частот, а также второй фильтр нижних частот, входом подключенный к выходу точного выпрямителя, причем в качестве классификатора паттернов мышечной синергии используется блок нечеткого логического вывода, содержащий последовательно соединенные блок корреляционных детекторов, блок фуззификаторов, базу нечетких решающих правил и дефуззификатор, выходом подключенный к бортовому процессору экзоскелета, а его блок корреляционных детекторов состоит из двух корреляционных детекторов, содержащих последовательно включенные умножитель и фильтр скользящего среднего, умножитель первого корреляционного детектора подключен к выходам первых фильтров нижних частот миоэлектронных устройств считывания, а второго - к выходам вторых фильтров нижних частот миоэлектронных устройств считывания, а выходы фильтров скользящего среднего корреляционных детекторов подключены к соответствующим входам фуззификаторов блока фуззификаторов.
| KR 20200130329 A, 18.11.2020 | |||
| WO 2013017985 A1, 07.02.2013 | |||
| СИСТЕМА И СПОСОБ ВЫБОРА КОНТЕНТА ДЛЯ ПОКАЗА ПОЛЬЗОВАТЕЛЮ | 2015 |
|
RU2595530C1 |
| US 2012004579 A1, 05.01.2012 | |||
| US 4087730 A, 02.05.1978 | |||
| JP 2007125380 A, 24.05.2007 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЛЬБЕДО ДЕЯТЕЛЬНОЙ ПОВЕРХНОСТИ МАТЕРИАЛА | 2011 |
|
RU2456558C1 |
| Сканирующий интерферометр Фабри-Перо | 1982 |
|
SU1060940A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ С ПОМОЩЬЮ ЭЛЕКТРОМИОГРАФИЧЕСКОГО УСТРОЙСТВА СЧИТЫВАНИЯ | 2017 |
|
RU2683859C1 |

